대부분의 conventional approach procedures는 primary final approach NAVAID를 기반으로 만든다. 허나 그 외의 접근들(예를 들어 RNAV(GPS) approaches)은 그렇지 않다. 접근에 대해 primary NAVAID가 존재한다면 이는 IAP briefing에 포함되어야 하고, navigation radio에 설정되어야 하며, course guidance를 위해 사용되기 전에 식별되어야 한다. FMS나 그 외 en route navigation으로부터 접근에 사용되는 conventional navigation으로 변경하기 위한 적절한 transition point가 고려되어야 한다. 특정 회사 표준 및 절차는 보통 이러한 변경이 언제 이루어져야하는지를 명시한다. 몇몇 항공사는 접근도중 FMS course guidance를 사용하도록 허가된다(단, conventional navigation guidance의 지시 및 표시가 가능한 경우). 많은 항공사들이 FAF 이전에 RNAV에서 conventional navigation으로 변경하도록 요구한다.
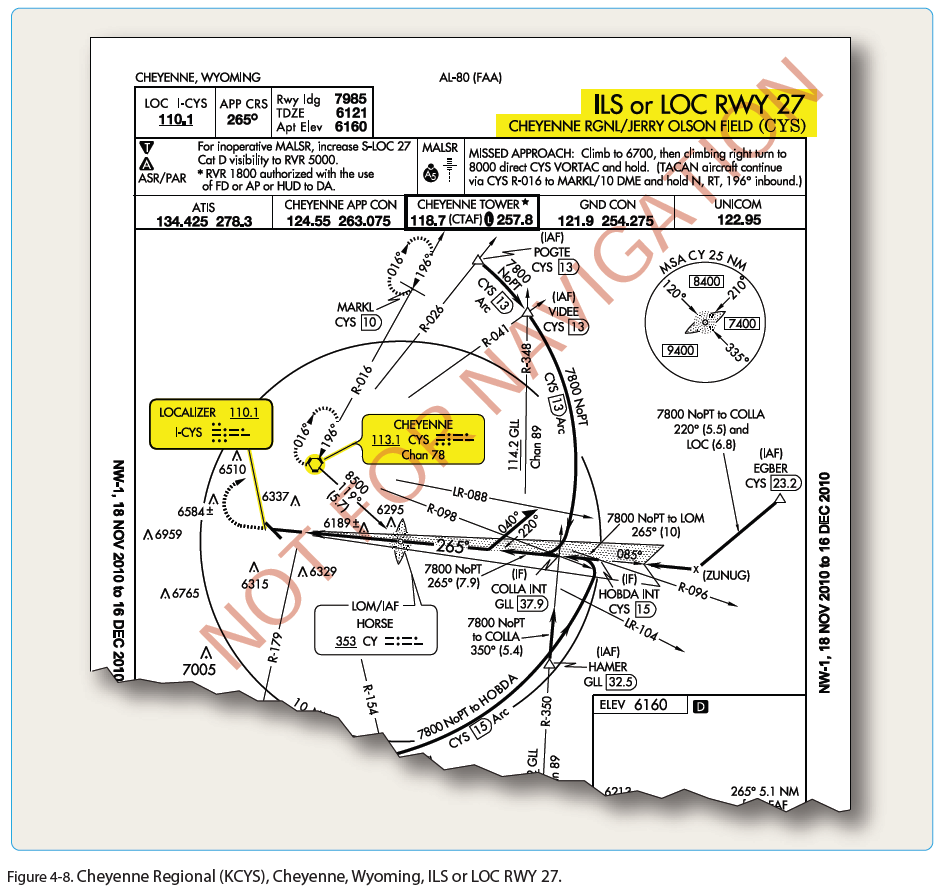
접근 절차의 복잡성에 따라 조종사는 initial NAVAID에서 primary NAVAID와 missed approach NAVAID로 전환하는 것을 브리핑해야 할 수 있다. 그림 4-8은 Cheyenne, Wyoming, ILS Runway 27 approach procedure를 나타낸다. 이는 IAP briefing 도중 추가적인 고려를 필요로 한다.
CYS VOR의 15DME arc가 ILS 접근 절차의 전환에 사용되는 경우 en route navigation에서 initial NAVAID로, 그리고 initial NAVAID에서 primary NAVAID로 전환하는 것에 주의를 기울여야 한다. 각 NAVAID로부터 전환이 발생할 때를 계획하는 것은 잘못된 NAVAID를 사용하는 것을 방지할 수 있다.
IAP를 비행하기 위해 필요한 항법 장비는 절차의 제목, 그리고 차트의 notes에 나타나 있다. straight-in IAP는 final approach guidance를 제공하는 항법 시스템, 그리고 해당 접근이 정렬되는 활주로를 통해 식별된다(예를 들어 VOR RWY 13). Circling-only approaches는 final approach guidance를 제공하는 항법 시스템, 그리고 문자를 통해 식별된다(예를 들어 VOR A). 두 개 이상의 항법 시스템이 슬래쉬(/)로 분리된 경우 이는 final approach를 수행하기 위해 두 개 이상의 장비가 반드시 사용되어야 함을 나타낸다(예를 들어 VOR/DME RWY 31). 두 개 이상의 항법 시스템이 “or”로 분리된 경우 이는 final approach를 수행하기 위해 둘 중 하나의 장비가 사용될 수 있음을 나타낸다(예를 들어 VOR or GPS RWY 15).
경우에 따라 접근의 바깥 부분을 위해선, 혹은 IAF로 향하기 위해선 다른 유형의 항법 시스템이 요구된다(예를 들어 절차 진입이나 fix 식별을 위해 레이더가 요구되는 경우). ATC 레이더나 그 외 장비가 en route environment로부터의 접근 진입을 위해 필요하다면 차트의 plan view에 note가 명시된다(예를 들어 RADAR REQUIRED, 혹은 AUTOMATIC DIRECTION FINDER(ADF) REQUIRED). 레이더나 그 외 장비가 final approach segment의 바깥 부분(실패접근 포함)에서 필요하다면 pilot briefing의 notes box에 note가 명시된다(예를 들어, RADAR REQUIRED 혹은 DISTANCE MEASURING EQUIPMENT(DME) REQUIRED). final approach segment의 바깥 부분에서 VOR이 요구되는 경우에는 note가 명시되지 않는다. 조종사는 접근(실패접근 포함)을 수행하기 위해 필요한 NAVAID를 항공기가 갖추고 있는지를 확인해야 한다. IAP를 위한 장비 조건에 대해서는 AIM paragraph 5-4-5를 참고한다.
VOR, DME, TACAN, VORTAC, VOR/DME, NDB, 혹은 compass locator facility(locator outer marker와 locator middle marker 포함)가 사용 불가능할 경우(즉, NAVAID 정보를 이용할 수 없거나, 항공기가 ADF나 DME를 장비하지 않거나, 혹은 ADF나 DME가 작동하지 않을 경우) RNAV system을 Substitute Means of Navigation으로 사용할 수 있다. 예를 들어 항공기가 적절한 RNAV system을 갖추고 있다면 조종사는 사용 불가능한 NDB의 상공에서 체공할 수 있다. RNAV system을 항법 수단으로 대체할 적절한 시기 및 절차에 대해서는 Advisory Circular 90-108, Use of Suitable RNAV system on Conventional Routes and Procedures를 참조한다.
holding fix를 향하여 승인받은 후 “cleared...approach”를 받은 경우 보통 항공기에 새로운 경로가 발부되지 않는다. 비록 항공기가 holding fix에 도달하기 전에 접근 승인이 발부되었다 하여도 조종사는 마지막으로 할당받은 경로인 holding fix를 거쳐 진행해야 한다. 만약 접근 차트에 feeder route가 게재되어 있다면 해당 fix와 연관된 feeder route를 거쳐 IAF로 진행해야 한다. 차트에 게재된 off-airway(feeder) routes(en route structure부터 IAF로 이어지는 경로)는 접근 승인 발부 시 approach clearance의 일부이다.
holding fix 이전에 위치한 fix로부터 IAF로 향하는 feeder route가 시작되며 접근 승인이 발부되었다면 조종사는 feeder route를 경유하여 접근을 수행해야 한다. 만약 IAF가 holding fix로 향하는 비행경로 이전에 위치한다면 조종사는 IAF에서 이와 유사한 방식으로 접근을 시작해야 한다.
만약 IAF로 직접 향하는 비행경로를 원할 경우 관제사는 “direct,” “proceed direct,” 혹은 조종사가 알아들을 수 있는 유사한 단어를 포함하여 명시해야 한다. clearance가 불확실한 경우 조종사는 ATC에게 즉시 문의해야 한다.
설령 접근 보조시설의 구성 요소가 작동하지 않거나 신뢰할 수 없다 하여도 차트의 계기접근 명칭이 접근을 식별하는데 사용된다. 관제사는 approach clearance 발부 시 차트의 접근 명칭과 함께 작동하지 않는, 혹은 신뢰할 수 없는 접근 보조 시설 요소를 반드시 알려야 한다. (예시: “Cleared ILS RWY 4, glideslope unusable.”)
Area Navigation Courses
RNAV(GPS) approach procedures는 항공기에 탑재된 항법 데이터베이스를 사용하여 비행하기 때문에 자체적인 tracking issues를 가질 수 있다. 이러한 접근은 coupled approaches로, 혹은 manual로 비행될 수 있다. 어떠한 경우이든 항법 시스템 코딩은 접근 및 실패접근에 대한 waypoint(WP) sequencing을 포함하는 procedure design을 기반으로 한다. procedure design은 WP가 fly-over(FO)인지, 혹은 fly-by(FB)인지를 나타내며 각각에 대한 적절한 안내를 제공한다. FB WP는 다음 비행구간에서의 overshoot을 방지하기 위하여 turn anticipation을 사용하도록 요구한다. FO WP는 WP 상공을 지나기 전까지는 선회를 수행하지 못하도록 만든다. WP 상공 통과 후에는 다음 비행구간을 향하여 intercept maneuver를 수행하도록, 혹은 다음 WP를 향하여 직진 경로를 비행하도록 만든다.
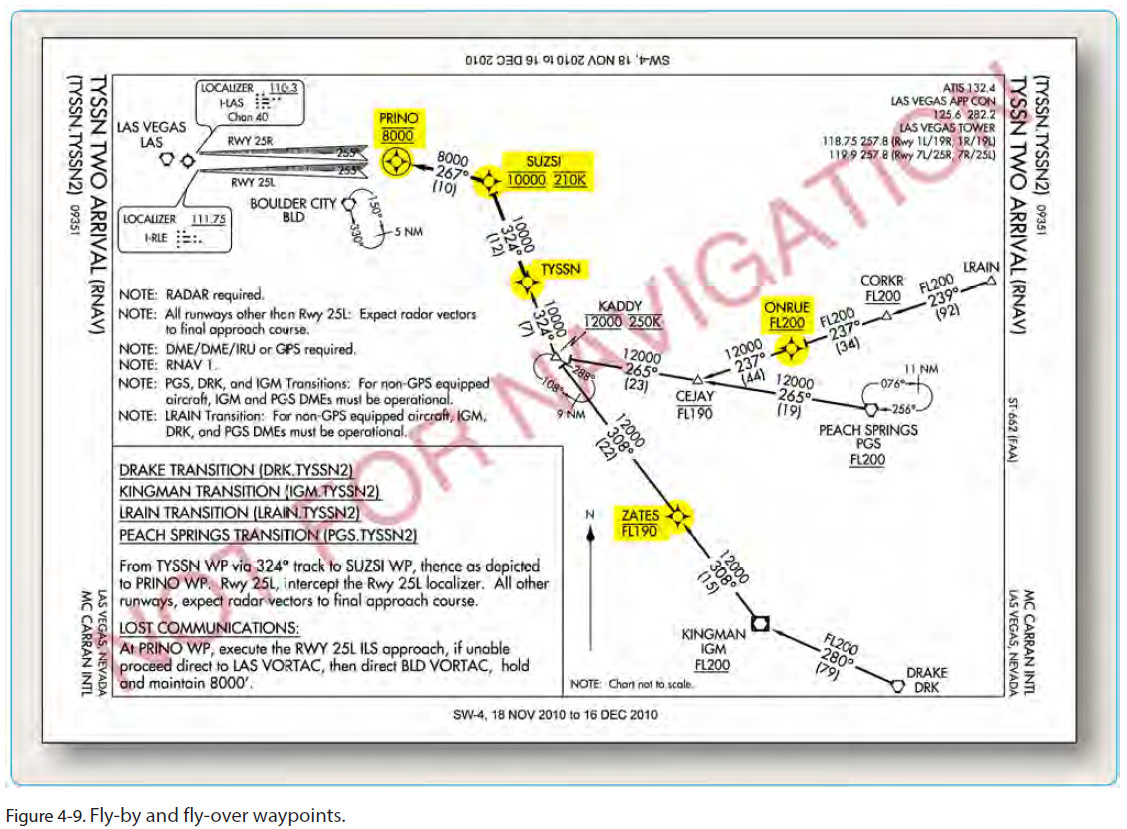
approach waypoints는 보통 FB WP이다(단, MAWP(missed approach waypoint)와 MAHWP(missed approach holding waypoint 제외). 그림 4-9의 plan view를 보면 FB WP는 네 개이지만 FO WP(PRINO)는 하나이다. 특정 RNAV WP를 향해 수동으로 비행하는 경우 조종사는 부드러운 전환을 위하여 FB WP에서 turn anticipation을 수행해야 한다. 허나 FO WP의 경우에는 WP를 통과하기 전까지 선회를 수행해서는 안 된다.
접근 절차 도중 WP의 순서가 어떻게 정해지느냐에 따라 WP가 데이터베이스에 FB WP와 FO WP로 모두 코딩될 수 있다. 예를 들어 IAF로 사용되는 WP는 접근 도중 FB WP로 코딩되며 만약 해당 WP가 MAP에 대한 MAWP 역할도 수행한다면 FO WP로도 코딩될 수 있다. 이는 계기 접근 절차를 직접 작성하거나 수정하지 말고 FMS로부터 로드해야 하는 이유 중 하나이다.
차트에 표시되는 고도들은 네 가지 방법(minimum, maximum, recommended, mandatory)으로 표시된다.
• Minimum altitudes는 밑줄과 함께 표시된다. 항공기는 표시된 값 이상의 고도를 유지해야 한다.
• Maximum altitudes는 윗줄과 함께 표시된다. 항공기는 표시된 값 이하의 고도를 유지해야 한다.
• Mandatory altitudes는 윗줄과 밑줄이 함께 표시된다. 항공기는 표시된 값의 고도를 유지해야 한다.
• Recommended altitudes는 윗줄이나 밑줄 없이 표시된다.
Note: 조종사는 차트에 표시된 고도를 지켜야 한다. 왜냐하면 경우에 따라 ATC는 이러한 고도들을 항공기 수직 분리에 사용하기 때문이다. 만약 차트에 표시된 고도가 ATC clearance에서 명시되었다면 해당 고도는 mandatory altitudes가 된다.
Minimum Safe/Sector Altitude
Minimum Safe Altitudes는 비상 상황을 위해 게재된다. MSA는 모든 장애물로부터 1,000ft의 장애물 간격을 제공한다. 허나 이는 이용 가능한 항법 신호 범위는 보장하지 않는다. plan view에 표시되는MSA는 다음을 포함한다: MSA 중심의 식별자, MSA의 반경, 구역(들), 그리고 장애물 회피를 제공하는 최소 해수면 고도. conventional navigation systems의 경우 MSA는 보통 계기 접근의primary omnidirectional facility를 기초로 한다. 허나 이용 가능한 적절한 시설이 없는 경우에는 ARP(airport reference point)를 기초로 할 수 있다. RNAV approaches의 경우 MSA는 RNAV waypoint를 기반으로 한다. MSA는 보통 25NM의 반경으로 이루어진다. 허나 conventional navigation systems의 경우 공항 착륙 표면을 포함하기 위해 30NM로 반경이 확장될 수 있다.
plan view에는 보통 하나의 sector altitude가 설정된다. 허나 장애물 회피를 위해 MSA가 네 개의 구역까지 나뉠 수 있다.
Final Approach Fix Altitude
IAP briefing 도중 브리핑되어야 할 또다른 중요한 고도는 FAF altitude이다(비정밀 접근의 경우 이는 X 모양으로 지정되며 정밀 접근의 경우에는 번개모양으로 지정된다). 이러한 고도를 준수하는 것은 안정적인 접근에 직접적으로 영향을 미칠 수 있다.
비정밀 접근의 FAF를 통과할 때 적절한 속도, 고도, 그리고 외장을 갖추는 것은 어떠한 비행기에도 매우 중요하다. stabilized approach concept는 차트에 게재된 고도에서 FAF를 교차하는 것이 성공적인 비정밀 접근의 핵심 요소임을 시사한다(특히 대형 터보제트 항공기의 경우).
정밀 접근의 glideslope intercept altitude 또한 IAP briefing에 포함되어야 한다. glideslope을 교차할 때 이러한 고도를 인지하면 조종사는 “false glideslope”이나 그 외 잘못된 지시를 의도치 않게 따르지 않을 수 있다. 많은 항공사들이 ILS의 기초가 되는 비정밀 접근의 FAF를 통과할 때 callout을 수행한다. PM은 fix의 명칭과 차트의 glideslope altitude를 명시한다. 이를 통해 두 조종사는 각자의 고도계를 확인하여 올바른 값이 표시되는지를 확인할 수 있다.
Minimum Descent Altitude(MDA), Decision Altitude(DA), And Decision Height(DH)
MDA – electronic glideslope가 제공되지 않는 SIAP(standard instrument approach procedure)를 수행하는데 있어 final approach나 circling-to-land maneuvering 도중 하강이 승인되는 가장 낮은 고도(MSL).
DA – 접근을 계속하기 위한 required visual reference가 설정되지 않았을 때 실패 접근을 시작해야 하는 특정 고도.
DH – ILS, MLS, 혹은 PAR IAP 도중 접근을 계속할지 실패접근을 수행할지 결정해야하는 고도.
CAT II와 CAT III의 DH는 AGL을 기준으로 하며 radio altimeter로 측정된다.
CAT I 정밀 접근에 대한 HAT(height above touchdown)는 보통 TDZE(touchdown zone elevation)으로부터 200ft이다. 신호 범위로 인해, 혹은 final approach obstacle clearance surface(OCS)나 missed approach OCS를 침범하는 장애물로 인해 HAT가 250ft 이상일 수도 있다. 설령 OCS를 관통하는 장애물이 있다 해도 해당 지점이 접근 차트에 표시되지는 않는다. 조종사는 MDA, DA, 혹은 DH를 브리핑함으로써 어떤 minimums가 사용되는지 확인해야 한다. 이러한 고도들은 여러 요소들에 의해 제한될 수 있다. approach category, 항공기나 지상에서 작동하지 않는 장비, 조종사 자격, 그리고 회사의 인가는 차트의 MDA∙DA∙DH 고도를 제한하거나 변화시킬 수 있다.
항공사의 경우 운영기준(OpSpeces)이 몇몇 접근 유형에 대한 제한 요인이 될 수 있다. NDB approach와 circling approach가 바로 그 예이다. 운영기준에 명시된 해당 접근들의 minimums는 차트의 minimums보다 더 제한적일 수 있다. Part 121 operator와 135 operator는 운영기준의 Part C에 따라 1,000ft MDA 및 시정 3SM 미만에서는 circling approaches가 제한된다. 그리고 NDB approaches의 경우에는 접근에 대해 게재된 시정을 초과하는 특정 시정 기준(보통 2SM)을 가진다. 이러한 상황들에서 조종사는 둘 중 더 제한적인 것을 판단한 다음 해당 minimums를 따라야 한다.
경우에 따라 조종사 자격이 계기 접근에 대한 MDA, DA, 혹은 DH를 제한하는 요인이 될 수 있다. RNP AR은 특정 교육을 받은 조종사, 그리고 해당 접근을 수행할 수 있는 장비 및 허가를 갖춘 항공기로 제한된다. 조종사 자격과 연관된 이 외의 규칙들 또한 특정 접근에 대한 MDA, DA, 혹은 DH를 결정할 수 있다. 14 CFR Part 121, 121.652, 14 CFR Part 125, 125.379, 그리고 14 CFR Part 135, 135.225는 본인이 운항 중인 항공기에 대하여 경험이 많지 않은 PIC에게 approach minimums와 visibility를 각각 100ft, 그리고 0.5마일 더하도록 요구한다.이러한 “high-minimums” pilots에 대한 규칙은 연방 규정과 회사 운영 기준을 통해 결정된다. 특정 접근에 대한 minimums를 결정하는 요인들은 여러 가지가 있다. 조종사는 비행 전 계획 및 접근 계획 도중 이러한 요인들을 고려해야 한다.
DA/DH나 MDA 너머로 접근을 계속하기로 선택하였다면 runway와runway environment의 식별과 관련하여 14 CFR 91.175(c)에서 명시하는 지침들을 준수해야 한다.
DA/DH나 MDA/Missed Approach point에서 실패접근을 수행하는 것이 지연될 경우 visual obstacle clearance surface를 관통하는 장애물과 충돌할 위험에 처하게 된다는 점을 인지해야 한다.
IAP의 visual segment는 DA나 MDA에서 활주로까지 이어진다. visual segment를 운영하는 두 가지 방법이 있다. 하나는 14 CFR Part 91, 91.175(c)에 따라 natural vision을 사용하는 것이고다른 하나는 14 CFR Part 91, 91.176에 따라 Enhanced Flight Vision System을 사용하는 것이다.
Enhanced Flight Vision Systems (EFVS) and Instrument Approaches [그림 4-10A]
EFVS(Enhanced Flight Vision System)은 HUD(head up display), 혹은 이와 동등한 디스플레이를 사용하는 항공기 시스템이다. EFVS는 항공기 비행 정보와 비행 기호, 항법 안내, 외부의 실시간 이미지를 하나의 화면에 결합하여 조종사에게 제공한다. forward-looking infrared (FLIR), millimeter wave radiometry, millimeter wave radar, low-level light intensification, 혹은 기타 real-time imaging technologies를 기반으로 하는 이미지 센서들이 외부의 실시간 이미지를 생성한다. 비행 정보, 항법 안내, 그리고 센서 이미지를 HUD(혹은 이와 동등한 디스플레이)에 결합함으로써 조종사는 접근, 착륙, 그리고 rollout 도중 비행경로를 따라 전방을 계속 주시할 수 있다.
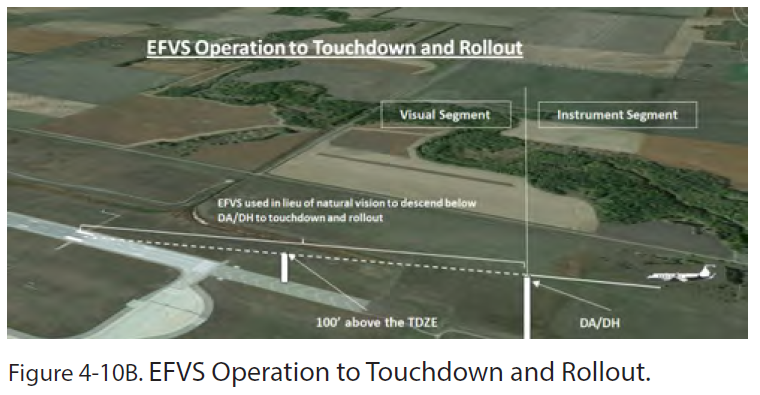
section 91.175(c)와 91.176은 DA/DH나 MDA 미만을 visual로 운영하는 두 가지 방법을 명시하고 있다. 하나는 91.175(c)에 따라 natural vision을 사용하는 방법이고, 다른 하나는 91.176에 따라 EFVS의 enhanced vision을 사용하는 방법이다. natural vision을 사용하여 runway environment를 육안으로 확인할 수 없는 경우 조종사는 91.176에 따라 EFVS를 사용하여 DA/DH나 MDA 미만으로 계속 하강할 수 있다. 시정 조건으로 인하여 접근이나 착륙을 수행하기 위해선, enhanced flight visibility를 결정하기 위해선, required visual references를 식별하기 위해선, 혹은 rollout을 수행하기 위해선 natural vision 대신 EFVS를 사용해야 하는 운영이 바로 EFVS operation이다. EFVS operations에는 두 가지 유형이 있다 – EFVS operations to touchdown and rollout, 그리고 EFVS operations to 100 feet above the TDZE(touchdown zone elevation). EFVS operation to touchdown and rollout은 조종사가 natural vision 대신 EFVS가 제공하는 enhanced vision 이미지를 사용하여 DA나 DH로 하강한 다음 touchdown and rollout을 수행하는 운영이다 [그림 4-10B]. 이는 DA나 DH를 갖춘 standard instrument approach procedures나 special instrument approach procedures에서 수행될 수 있다(예를 들어 precision approach나 APV approach).
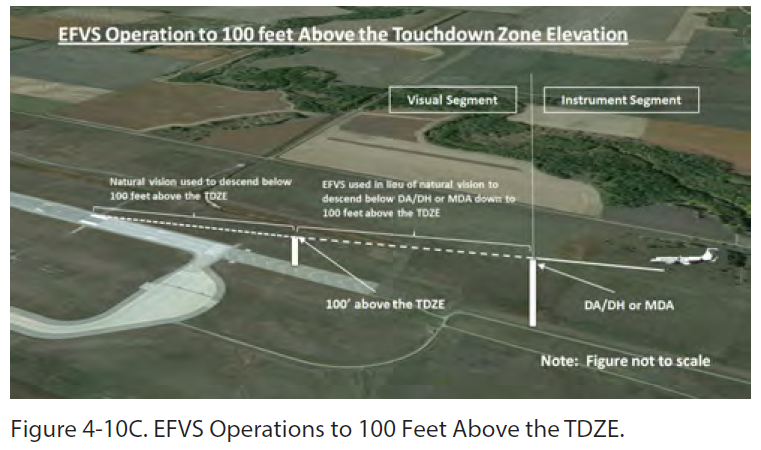
EFVS operation to 100 feet above the TDZE은 조종사가 natural vision 대신 EFVS를 사용하여 DA/DH나 MDA 미만으로 하강하는 운영이다 [그림 4-10C]. 허나 100 feet above the TDZE 미만으로 하강하기 위해선 natural vision을 사용해야 한다. EFVS operations to 100 feet above the TDZE은 DA/DH나 MDA를 갖춘 standard instrument approach procedures나 special instrument approach procedures에서 수행될 수 있다.
상황 인식을 위해 모든 비행 구간에서 EFVS를 사용하는 것이 허용된다. 허나 EFVS 디스플레이는 circling maneuvers를 수행하기에 충분한 시스템으로 설계, 설치, 증명, 혹은 의도되지 않았다. circling maneuver 도중 필요한 시각 참조물이 기동 내내 natural vision을 통해 명확하게 보이는 경우에만 EFVS가 사용될 수 있다. 따라서 MDA 이상에서 circling maneuver를 수행하는 동안, 혹은 MDA 미만으로 하강하는 동안 공항의 특정 부분이 뚜렷하게 보여야 한다는 조건을 충족하기 위해 EFVS를 사용할 수는 없다.
EFVS가 제공하는 시각 정보는 항공기의 디스플레이와 시스템이 제공하는 위치 정보를 검증하는 역할을 수행한다. 또한 enhanced flight visibility를 가늠하기 위해, required visual references를 식별하기 위해, 항공기를 활주로와 정렬하기 위해, 그리고 위치∙근접속도∙남은 거리 정보를 위해서도 EFVS를 사용할 수 있다. section 91.176(a)과 91.176(b)은 조종사로 하여금 EFVS를 사용하여 required visual references를 식별하는 것을, 그리고 EFVS가 제공하는 enhanced flight visibility가 IAP에 규정된 시정보다 낮지 않음을 판단하는 것을 허용한다. visual reference 조건과 enhanced flight visibility 조건을 모두 충족해야만 조종사는 DA/DH 미만으로(EFVS operation to touchdown and rollout 도중), 혹은 DA/DH나 MDA 미만으로(EFVS operation to 100 feet above the TDZE 도중) 하강할 수 있다. 또한 항공기는 정상 기동 및 정상 하강률로 활주로에 착륙할 수 있는 위치에 놓여있어야 한다. EFVS operations to touchdown을 위해선 활주로의 touchdown zone 내에서 착륙이 가능하도록 하강률이 유지되어야 한다(91.176(a)(vi)). 이는 모든 운영에 적용된다. EFVS operations to 100 feet above the TDZE를 위해선 touchdown zone 내에서 착륙이 가능하도록 하강률이 유지되어야 한다(91.176(b)(2)(v)). 이는 14 CFR Parts 121과 135에 따라 수행되는 운영에 적용된다.
EFVS를 사용한다 하여 IAP에 규정된 시정이나 DA/DH/MDA의 최소치가 낮아지는 것은 아니다. 예를 들어 Category I ILS approach(DA 200ft와 RVR 2400ft)에서 EFVS를 사용하는 조종사는 200ft의 DA와 2400ft의 enhanced flight visibility를 준수해야 한다. decision altitude는 조종사가 비행 중인 IAP에 의해 결정되며 이는 EFVS의 사용 여부에 의해 변화하지 않는다. 따라서 IAP에 지정된 시정도 변화하지 않는다. 차이점은 조종사가 RVR 2400ft를 natural vision을 사용하여 가늠하느냐, 혹은 EFVS를 사용하여 가늠하느냐이다. EFVS는 단순히 IAP의 visual segment를 운영할 수 있는 또 다른 수단을 제공할 뿐이다. 즉, 이는 natural vision으로는 보이지 않는 required visual references를 확인할 수 있는 수단을 제공하고 natural vision으로는 보이지 않는 required distance를 확인할 수 있는 수단을 제공한다.
EFVS operation 도중 91.176의 조건이 충족되지 않는다면 DA/DH나 MDA 이하에서 go-around를 수행해야 한다. missed approach procedure는 실패접근이 DA/DH 이상에서 시작되는 경우, 혹은 MAP에서 시작되는 경우에만 장애물 회피를 제공한다. 이는 200FT/NM의 상승률을 가정한다(단, 절차에서 더 높은 climb gradient가 확인되는 경우 제외). DA/DH 미만에서, 혹은 MAP 너머에서 go-around를 시작하는 경우에는 missed approach procedures를 따른다 하여 장애물 회피가 반드시 제공되는 것은 아니다. 따라서 사전 계획이 권장되며 여기에는 MAP와 touchdown 사이에서의 비상 상황이 포함되어야 한다. 또한 offset final approach course를 갖춘 계기 절차에서 EFVS의 사용 여부를 고려하는 경우 조종사는 접근 상태와 접근 경로 정렬을 잘 알고 있어야 한다. 측풍 수정, approach course offset, 그리고 EFVS가 제공하는 측면 시야에 따라 MAP에서 required visual references가 보일 수도 있고 보이지 않을 수도 있다. AC 90-106은 visual segment 장애물 회피, missed approach 장애물 회피, 그리고 offset approaches 고려 사항에 대한 정보가 포함되어 있다.
special IAP를 수행하기 위한 FAA의 승인을 받은 운영자는 해당 계기 절차를 평가하여 EFVS operations와의 호환을 결정해야 한다. special IAP는 종종 운영자로부터 특정 조건들을 요구한다. 여기에는 항공기 성능, 장비, 공항 시설 장비, 승무원 훈련, 혹은 그 외 조건이 포함될 수 있다. 또한 이러한 절차에는 nonstandard features(예를 들어 nonstandard final approach course alignment, nonstandard descent gradients, 혹은 EFVS operations와 호환되지 않을 수 있는 기타 특징들)가 존재할 수 있다.
OpSpec C073, MSpec MC073, 혹은 LOA C073를 발부받은 운영자는 C073에 따라 MDA를 DA/DH로 사용하는 특정 vertical navigation(VNAV) IAP에서 EFVS operations to touchdown and rollout을 수행할 수 있다(91.176(a)). 또한 91.176과 91.189는 Category II operation이나 Category III operation 도중 EFVS operation을 수행할 수 있도록 허용한다.
일부 GPS와 multi-sensor FMS RNAV avionics의 장점 중 하나는 advisory VNAV 기능이다. 접근 도중 수직 경로 정보를 얻는 유일한 방법은 ground-based precision NAVAID을 사용하는 것이었다. 허나 최신의 RNAV avionics는 electronic vertical path를 표시할 수 있다. 이는 minimums까지 일정한 하강률을 제공한다.
이러한 시스템은 primary guidance가 아닌 advisory이다. 따라서 조종사는 고도계를 사용하여 항공기가 차트의 고도 제한(stepdown fix altitudes 포함) 이상을 유지하는지 지속적으로 확인해야 한다. FAF 이내에서 advisory VNAV를 사용하기 위해선 조종사, 항공기, 그리고 운영자가 승인을 받아야 한다.
VNAV 정보는 특정 conventional nonprecision approach, GPS approach, 그리고 RNAV approach에 표시된다(뒷부분의 “Tpyes of Approaches” 참조). 이는 일반적으로 두 개의 fix(FAF와 landing runway threshold), FAF crossing altitude, 그리고 VDA(vertical descent angle)로 구성되며 VDP(visual descent point)가 포함될 수도 있다[그림 4-11A].
VDA는 advisory information을 제공한다. 이는 FAF나 step-down fix에서 MDA로 안정적인 하강을 설정할 수 있는 수단을 제공한다. 안정적인 하강은 CFIT(controlled flight into terrain) 사고를 줄이는 핵심 요소이다. 허나 해당 각도는 advisory information이라는 점을 인지해야 한다. MDA 미만에서는 추가적인 장애물 보호가 보장되지 않는다. 조종사는 14 CFR 91.175에서 명시된 시각 단서를 확인하지 않는 한 모든 stepdown fixes와 MDA를 준수해야 한다. 또한 조종사는 MDA 미만에서 등화가 켜진 장애물과 등화가 켜지지 않은 장애물을 모두 육안으로 수 있어야 한다. VDA가 존재한다 하여 visual segment에서 장애물 회피가 보장되는 것은 아니며 비정밀 접근을 비행하기 위한 조건을 변화시키지도 않는다.
조종사는 차트에 게재된 각도와 예상/실제 groundspeed를 사용하여 target rate of descent를 찾을 수 있다. 이는 U.S. Terminal Procedures Publication의 뒷면에 게재된 rate of descent table을 통해 계산 가능하다. 안정적 하강을 위한 보조 수단으로 VDA를 사용하기 위하여 해당 하강률을 비행할 수 있다. 특별한 장비가 필요하지는 않다.
드문 경우이지만 장애물과 nonprecision MAP의 위치로 인하여 LNAV minima가 glide path minima보다 더 낮은 HAT를 가질 수 있다. 이는 MDA 미만에 장애물이 존재한다는 것을 명확하게 알려준다. 조종사는 충분한 간격을 위해 해당 장애물을 반드시 확인해야 한다. 이러한 경우 glide path를 VDA로 취급하여 LNAV MDA로 하강하는데 사용할 수 있다(단, 비정밀 접근에 대한 모든 규칙들이 MDA에 적용되는 경우).
접근을 불안정하게 만들 수 있는 장애물이 MDA와 touchdown 사이에 존재하는 경우에는 profile view에 vertical descent angle이 표시되지 않는 대신 다음과 같은 문구가 포함된다: “Descent Angle NA”, 혹은 “Descent Angle NA-Obstacles.”
visual segment에서 조종사는 모든 장애물들을 see and avoid 해야 한다. 정률 하강은 비정밀 접근에 비해 많은 안전상 이점을 가지고 있다(stepdown fixes에서 여러 번의 level-offs를 수행하지 않아도 되며 직접 하강률을 계산하지 않아도 됨). 정률 하강이 사용되는 경우 FAF부터 착륙까지 stabilized approach를 유지할 수 있다. 또한 항전 장치에 의해 생성된 electronic vertical path는 CFIT를 줄이며 접근 및 착륙 도중 착시의 영향을 최소화한다. 일부 국가의 경우 비정밀 접근 도중 CDFA(continuous descent final approaches)를 사용하도록 규정하기도 한다.
Wide Area Augmentation System
WAAS(Wide Area Augmentation System)는 공항의 ground-based navigation equipment 없이도 ILS와 유사한 접근 성능을 확보할 기회를 제공한다.
Benefits Of WAAS In the Airport Environment
WAAS는 GPS가 제공하는 항법 서비스를 향상시키기 위하여 GPS 위성을 WAAS 정지 위성과 조합하는 항법 서비스이다.
WAAS는 en route, terminal, 그리고 approach operations에 대한 항법 시스템 정확도를 향상시킨다. 이러한 항법 기술은 특정 활주로에 대하여 vertically-guided instrument approaches를 지원한다. vertically-guided approaches는 비정밀 접근에 비해 조종사 업무량을 줄여주며 안전상 이점을 제공한다. WAAS가 지원하는 vertically guided approach procedures를 LPV(localizer performance with vertical guidance)라 부른다. 이는 특정 공항에서 최소 200ft까지 approach minimums를 제공한다. 실제 minimums는 공항의 인프라와 장애물들을 기반으로 결정된다.
Advantages of WAAS Enabled LPV Approaches
WAAS가 지원하는 LPV approaches의 장점은 다음과 같다:
•LPV 절차는 공항의 지상 송신기를 필요로 하지 않는다.
•항법 시설의 배치, 항법 시설 주변의 clear zones 유지, 혹은 정비를 위한 시설 접근성을 고려하지 않아도 된다.
•LPV는 ILS와 관련된 critical area를 필요로 하지 않는다.
•조종사의 관점에서 볼 때 LPV approach는 ILS처럼 비행된다. 허나 WAAS approach는 ILS보다 더 안정적이다.
•WAAS 사용자는 RNAV procedure, basic RNP(required navigation performance) procedure, 그리고 LPV procedure를 비행할 수 있다. 그리고 WAAS가 제공하는 모든 navigation solution을 고려하였을 때 항전 장치의 비용이 상대적으로 저렴하다.
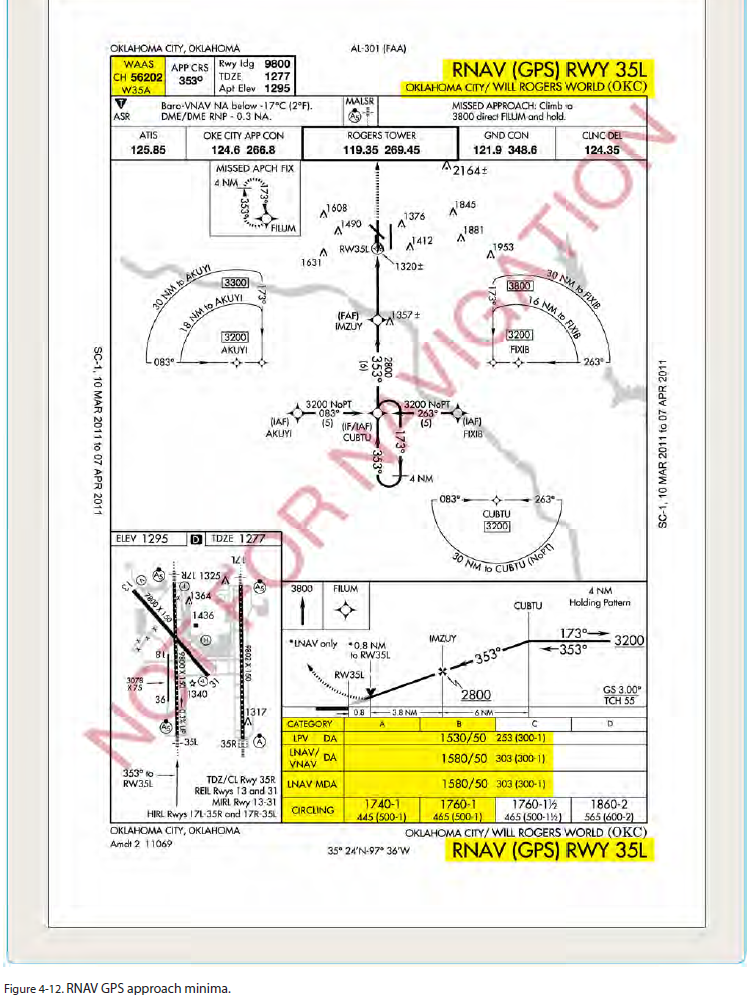
RNAV(GPS) approach charts에는 보통 네 개의 approach minimums가 표시된다: LPV, LNAV/VNAV, LNAV, 그리고 Circling. 그림 4-12는 접근 차트에 이러한 minimums가 어떻게 표시되는지를 보여준다. 이를 통해 GPS를 갖춘 많은 항공기들이 해당 절차를 사용할 수 있으며 WAAS를 사용할 수 없게 되는 상황이 발생하는 경우 운영상 유연성을 제공한다. 일부 항공기의 경우 GPS 수신기만을 장착하여 LNAV MDA를 비행할 수 있다. 일부 항공기의 경우 GPS와 FMS(Baro-VNAV를 갖춘)를 장착하여 LNAV/VNAV DA를 비행할 수 있다. WAAS LPV approach를 비행하기 위해선 WAAS-LPV avionics가 필요하다. 어떤 이유로든 WAAS 서비스를 이용할 수 없게 되는 경우 GPS나 WAAS를 갖춘 모든 항공기는 LNAV MDA로 되돌아간 후 GPS만을 사용하여 안전하게 착륙할 수 있다(GPS의 경우 거의 100% 이용 가능함). 일부 RNAV(GPS) approach chart에는 LP line of minima가 표시되어 있다. 허나 LP는 단계적으로 폐지되고 있다. missed approach segment에 장애물이 존재하는 경우 두 개의 lines of minima가 표시될 수 있다(하나는 특정 climb gradient가 없는 대신 높은 approach minima를, 그리고 다른 하나는 특정 climb gradient가 존재하는 대신 낮은 approach minima를 표시).
LPV는 electronic lateral and vertical guidance 기능을 갖춘 WAAS APV(approach with vertical guidance) approach minimums를 식별한다. LPV는 WAAS criteria(vertical alarm limit이 12m ~ 50m)에 따라 구성된 접근에서 사용된다. 이러한 유형의 접근을 위해선 LPV approaches에 대해 승인된 WAAS avionics가 필요하다. lateral guidance는 localizer의 정확도와 동일하다. 그리고 보호 영역은 LNAV 및 LNAV/VNAV lateral protection보다 훨씬 작다. AFM에 LPV approaches를 지원한다는 내용이 명시되어 있다면 해당 minima line을 비행할 수 있다. pilot briefing의 왼쪽 상단에 표시된 WAAS 정보를 주목하라[그림 4-12]. WAAS라는 용어의 아래에 WAAS channel number(CH 56202), 그리고 WAAS approach identifier(W35A)가 표시된다. 이 경우 W35A는 Runway 35L을, 그리고 해당 활주로에 대한 일련의 절차들 중 첫 번째를 지정하는 문자를 나타낸다.
LNAV/VNAV는 vertical guidance를 갖춘 RNAV IAP를 수용하기 위해 개발된 APV minimums를 식별한다. 이는 일반적으로 Baro-VNAV를 통해 제공된다. LNAV/VNAV는 정밀 접근이나 LPV보다 vertical and lateral integrity limits가 더 크다. 접근이 electronic glide path를 통해 비행되므로 landing minimums는 DA로 표시된다. 경우에 따라 LNAV/VNAV의 visibility minimums가 LNAV only의 visibility minimums보다 클 수 있다. 이는 LNAV/VNAV vertical descent path의 DA가 LNAV MDA missed approach point보다 runway threshold로부터 더 멀리 떨어져 있기 때문에 발생한다.
또한 그림 4-12에 LNAV minimums line도 표시되어 있다. 해당 minimum은 lateral navigation에만 적용되며 approach minimum altitude는 MDA로 게재된다. LNAV는 GPS stand alone approaches와 동일한 수준의 서비스를 제공한다. LNAV는 다음 시스템들을 지원한다: WAAS(navigation solution이 vertical navigation을 지원하지 않는 경우), 그리고 GPS approaches를 수행하도록 승인된 GPS.
straight-in approach minimums가 게재될 수 없는 경우 모든 유형의 RNAV 장비와 함께 circling minimums를 사용할 수 있다.
Ground-Based Augmentation System(GBAS)
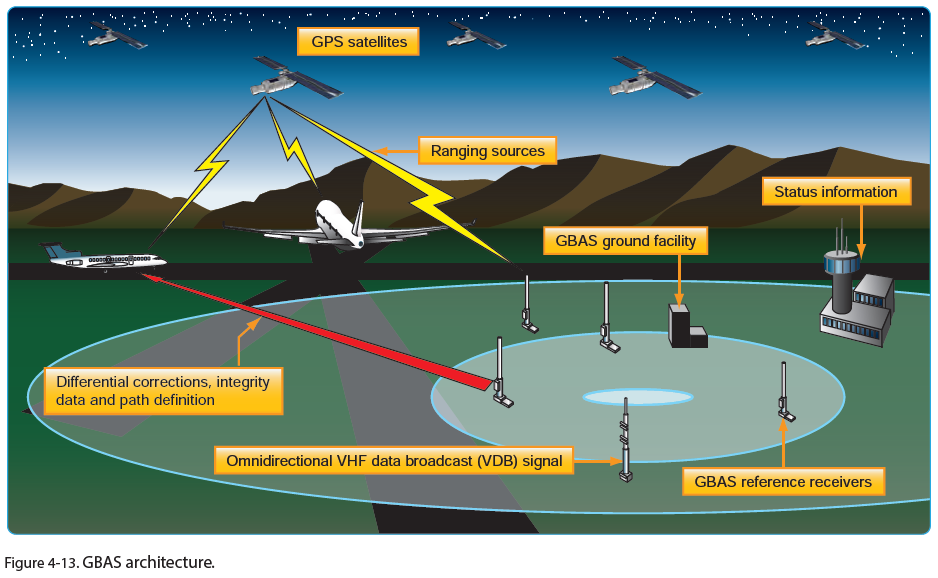
GBAS 시스템은 원래 LAAS(Local Area Augmentation System)라 불렸다. 이제 국제 사회는 이러한 유형의 항법 시스템에 대한 공식 용어로 GBAS를 채택하였다. GBAS는 precision approach, DPs, 그리고 terminal area operations를 위해 공항 지역(대략 20 ~ 30마일 반경)에 GPS 서비스를 집중시키는 ground-based augmentation이다. 이는 지상 송신기의 VHF radio data link를 통해 correction message를 방송한다. GBAS는 Category I/II/III precision approaches에 필요한 매우 높은 정확도, 가용성, 그리고 무결성을 제공할 뿐만 아니라 유연한 곡선 접근 경로를 제공한다. GBAS의 정확도는 수평 및 수직 축에서 1m 미만으로 증명되었다. [그림 4-13]
GBAS는 지상 장비, 그리고 항전 장치로 구성된다. 지상 장비는 네 개의 reference receivers, GBAS ground facility, 그리고 VHF data broadcast transmitter를 포함한다. 이러한 지상 장비는 항공기의 GBAS 항전 장치를 통해 보완된다. 네 개의 GBAS GPS reference receivers는 GPS 위성의 신호를 수신한다. reference receivers는 GPS를 사용하여 위치를 계산한다. GPS reference receivers와 GBAS ground facility는 GPS가 제공한 위치의 오차를 측정한다.
GBAS ground facility는 실제 위치와 GPS 위치의 차이를 기반으로 GBAS correction message를 생성한다. 이러한 메시지에는 적절한 무결성 매개변수와 접근 경로 정보가 포함된다. 그런 다음 GBAS correction message가 VHF data broadcast(VDB) transmitter로 전송된다. VDB는 GBAS 서비스 범위에 걸쳐 GBAS 신호를 방송한다. GBAS는 대략 20 ~ 30마일 반경에 서비스를 제공한다. 이러한 신호 범위는 항공기의 transition(en route에서 terminal area로)을 지원하도록 설계되었다.
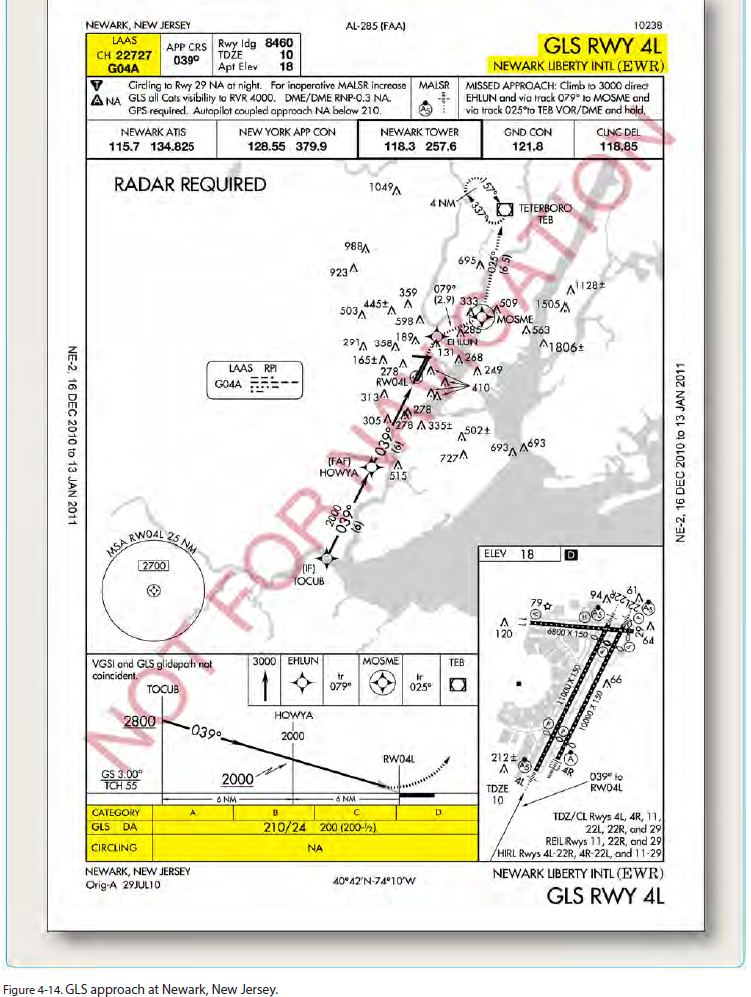
항공기의 GBAS 장비는 위치, 속도, 그리고 시간에 대해 제공받은 보정 정보들을 사용하여 항공기를 활주로로 안내한다. 이러한 신호는 ILS와 유사한 guidance를 touchdown으로부터 최소 200ft까지 제공한다. GBAS는 궁극적으로 활주로 표면까지 착륙을 지원한다. 그림 4-14는 Newark, New Jersey로 향하는 GBAS approach의 예시이다.
Required Navigation Performance(RNP)
RNP의 운영상 이점으로는 정확성, 그리고 OPMA(onboard performance monitoring and alerting)가 포함된다. 이는 기존 RNAV보다 항법 정밀도를 높이고 minimums를 낮춘다. RNP DA는 최소 250ft일 수 있다. 또한 RNP는 장애물 회피 한계를 개선시켜주며 조종사 업무량을 감소시켜준다. RNP 항공기가 정확한 경로를 비행할 경우 ATC는 해당 항공기가 특정 위치에 있다는 확신을 가질 수 있으므로 안전성이 극대화되고 수용 능력이 증가한다.
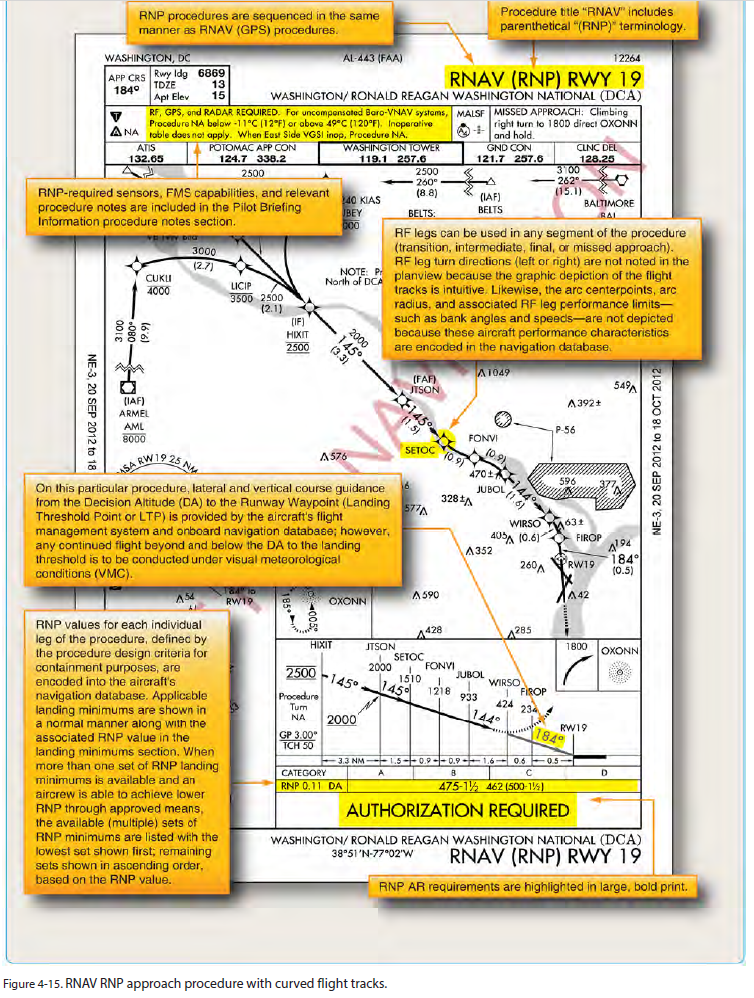
RNP approach procedures의 이점을 얻기 위한 핵심 요소는 곡선 비행경로이다. fix를 중심으로 일정한 반경의 선회를 수행하는 것을 “radius-to-fix legs(RF legs)”라 부른다. 항법 데이터베이스에 인코딩되는 이러한 선회들을 통해 항공기는 정확한 곡선 경로를 유지할 수 있다. 이를 통해 위치 정확도가 유지되며 지형이나 특정 공역을 회피할 수 있다. terminal RNAV procedures에 RF legs를 도입함으로써 공역의 사용이 향상되었으며 직선 비행경로로 제한된 활주로로부터(혹은 경우에 따라 IFR procedure가 전혀 제공되지 않는 활주로로부터) 입출항하는 절차를 개발할 수 있게 되었다. RF leg를 포함하는 절차를 비행하기 위해선 RF 기능을 갖춘 항법 시스템이 필요하다. pilot briefing 부분의 notes box를 참조하라 [그림 4-15].
(ATP: RNP approaches의 이점을 달성하기 위해 필요한 핵심 구성 요소로는 곡선 비행경로를 비행할 수 있는 능력을 포함한다. 따라서 RNP approach 절차는 FMS/GPS로 하여금 GPS 신호를 수신하는 기능을, 그리고 RF(radius-to-fix) segments를 비행하는 기능을 요구한다. 이는 접근 차트의 notes section에 "RF and GPS REQUIRED"라 명시된다.)
미국에서 RNP approach procedures를 이용하려는 운영자는 AC 90-101, Approval Guidance for RNP Procedures with Authorization Required (AR)에서 명시하는 특별 RNP 조건을 충족해야 한다. 현재 대부분의 새로운 transport category airplanes는 RNP operations를 위한 감항 승인을 받는다. 허나 각 시스템이 충족할 수 있는 정밀도 수준에는 차이가 있을 수 있다. 각 운영자는 이러한 계기 접근 절차를 사용하는데 필요한 승인을 받아야할 책임을 가지고 있다.
RNAV Approach Authorization
conventional non-precision approach, RNAV approaches, 혹은 LNAV/VNAV approaches 도중 VNAV를 사용하기 위한 인가는 운영자의 Opspecs, AFM, 혹은 그 외 FAA-approved documents에서 확인할 수 있다. RNAV approach systems와 관련하여 다양한 수준의 인가들이 존재한다. 항공기에 설치된 장비의 유형, 해당 장비의 redundancy, 해당 장비의 작동 상태, 조종사 훈련 수준, 그리고 운영자의 FAA 인가 수준은 VNAV 정보를 사용하는 능력에 영향을 미칠 수 있는 요소들이다.
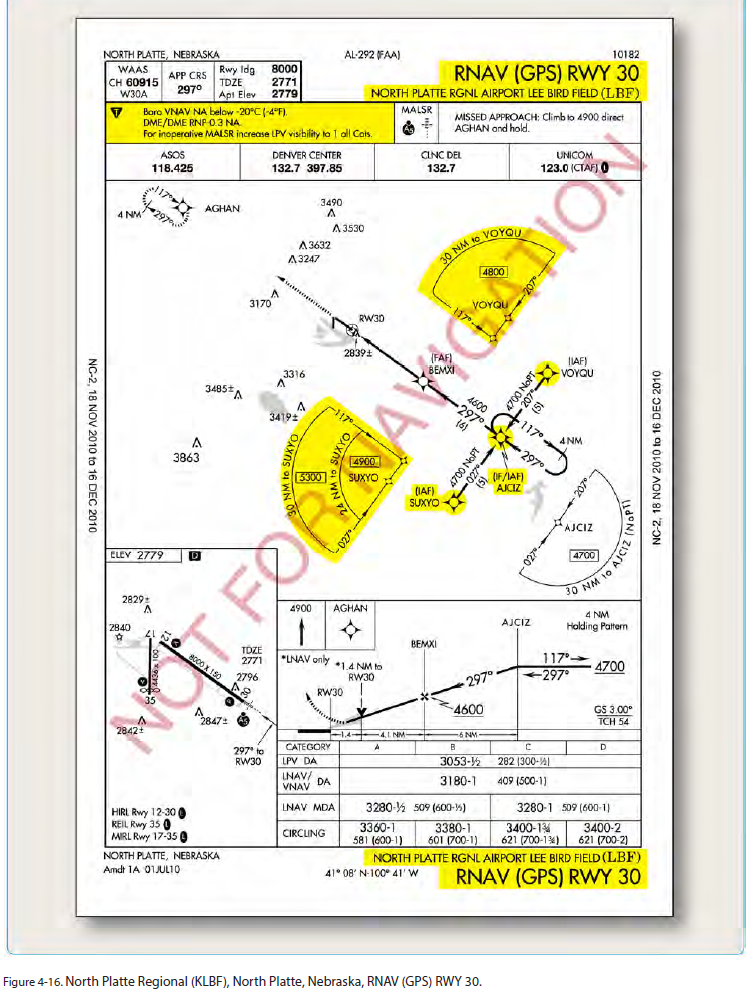
대부분의 Part 121, 125, 135, 그리고 91 flight departments는 조종사 훈련 프로그램에 RNAV approach 정보를 포함한다. 따라서 그림 4-16의 RNAV(GPS) RWY 30 approach를 사용하는 조종사는 본인에게 인가된 minimums가 무엇인지를 알고 있을 것이다. 회사의 OpSpecs와 FOM, 그리고 항공기의 AFM은 이러한 유형의 접근을 비행하는 특정 운항 조건과 절차를 명시한다.
이러한 유형의 접근과 관련하여 고려 및 브리핑해야 할 몇 가지 유의 사항이 있다. 하나는 planview에 표시되는 TAA(terminal arrival area)이다. TAA는 특정 입항 영역들의 경계를, 그리고 해당 영역들의 MIA를 표시한다. TAA는 IAP briefing에 포함되어야 한다. 또한 비상 상황 발생 시 TAA에 표시된 고도들을 MSA 대신 참조해야 한다는 것도 중요하다.
또한 조종사는 Baro-VNAV, 그리고 RNP와 관련된 문제를 알고 있어야 한다. 이러한 주제와 관련된 제한 사항이 차트의 notes section에 포함되어 있다 [그림 4-16].
RNP에 필요한 센서, FMS 기능, 그리고 관련 notes가 Pilot Briefing Information procedure notes section에 포함되어 있다. [그림 4-15] RNP AR 조건이 크고 굵은 글씨로 강조되어 있다. RNP procedures는 RNAV(GPS) procedures와 동일한 방법으로 순서가 매겨진다(Z, Y, X...). “RNAV”라는 절차 제목에 “(RNP)”가 포함된다. RF legs가 절차의 어느 구간에서도 사용될 수 있다(transition, intermediate, final, 혹은 missed approach). RF leg의 선회 방향(좌측이나 우측)은 planview에 표시되지 않는다. 왜냐하면 차트의 비행경로는 매우 직관적이기 때문이다. 또한 호의 중심점, 호의 반경, 그리고 RF leg 성능 한계(예를 들어 bank angles와 speeds)도 planview에 표시되지 않는다. 왜냐하면 항공기 성능 특성이 항법 데이터베이스에 인코딩되어있기 때문이다.
절차의 각 구간에 대한 RNP values가 항공기의 항법 데이터베이스에 인코딩된다. 적용 가능한 landing minimums는 이와 연관된 RNP value와 함께 landing minimums section에 표시된다. 두 개 이상의 RNP landing minimums를 이용할 수 있으며 조종사가 더 낮은 RNP를 달성할 수 있는 경우에는 다수의 RNP minimums가 RNP value를 기준으로 표시된다. 해당 절차의 경우 항공기의 FMS와 항법 데이터베이스는 DA부터 Runway Waypoint까지 lateral and vertical course guidance를 제공한다. 허나 DA 미만에서 landing threshold까지 계속 비행하는 것은 VMC 하에 수행되어야 한다. [그림 4-15]
Baro-VNAV
Baro-VNAV는 고도계의 기압 고도 정보를 사용하여 조종사에게 vertical guidance path를 제공하는 RNAV 시스템 기능이다. 특정 수직 경로는 보통 두 개의 waypoints 사이에서 계산되거나, 혹은 하나의 waypoint로부터 각도를 기반으로 계산된다. Baro-VNAV 시스템으로 LNAV/VNAV minimums를 운영하기 위해선 승인을 받아야 한다. 일부 접근의 경우 몇몇 요인들(예를 들어 local altimeter source를 사용할 수 없는 경우)로 인하여 Baro-VNAV가 승인되지 않을 수 있다. LPV procedures에서는 Baro-VNAV가 승인되지 않는다.
“DME/DME RNP-0.3 NA”라는 note는 RNAV를 위해 DME/DME sensors만을 사용하는 항공기의 접근을 금지한다. [그림 4-16]
이러한 절차는 RNP system을 통해 비행될 수 있으나 “RNP”는 특정 센서에 국한되지 않는다. 따라서 DME/DME만을 사용하여 RNP 0.3을 도출하는 항공기는 해당 절차를 수행할 수 없음을 명확히 나타내기 위해 이러한 note가 추가되었다.
RNP 항법에 승인된 센서 중 정확도가 가장 낮은 것은 DME/DME이다. 착륙하려는 공항에 DME NAVAID ground infrastructure가 있을 수도 있고 없을 수도 있다. DME 시설의 범위와 정확도가 RNP를 지원하며 DME 신호가 허용 오차를 충족한다면 “DME/DME RNP 0.3 Authorized”라는 note가 차트에 표시된다. DME 시설의 가용성이 중요한 경우에는 note에 “DME/DME RNP 0.3 Authorized; ABC and XYZ required.”라 표시될 수 있다. 이는 RNP 0.3을 보장하기 위해선 ABC DME 시설과 XYZ DME 시설이 필요함을 의미한다.
Hot and Cold Temperature Limitations
Baro-VNAV operation이 인가된 절차에는 최소 온도 및 최대 온도 제한이 게재되어 있다. 해당 온도는 LNAV/VNAV minimums에 대해 Baro-VNAV가 승인되지 않는 온도 범위를 나타낸다(단, temperature compensation이 이루어질 수 있는 경우 제외). 위의 예시에서 uncompensated Baro-VNAV은 섭씨 –11도(화씨 12도) 미만에서, 혹은 섭씨 49도(화씨 120도) 초과에서 제한된다. [그림 4-15] 해당 정보는 pilot briefing의 왼쪽 상단에서 확인될 수 있다. 온도 범위가 초과되는 경우 LNAV MDA까지의 stabilized descent를 위해 Baro-VNAV을 사용할 수 있다. 허나 visual segment에서 수직 경로 수정이 필요하지 않도록 각별한 주의를 기울여야 한다. 항공기 계기가 glide path를 지시할 때 VGSI는 above/below glidepath를 지시하는 경우 온도 오차로 인하여 glide path에 편차가 발생하고 있음을 알 수 있다(단, VGSI가 glide path와 일치하는 경우). MDA 미만으로 계속 접근하는 경우 이러한 편차를 고려해야 한다.
Baro-VNAV temperature compensation이 적용되는 많은 시스템들이 낮은 온도만을 보정한다. 이 경우 높은 온도에 대한 제한은 여전히 적용된다. 또한 정비 요원이 시스템 설치 도중 temperature compensation 기능을 활성화 해야만 해당 기능이 작동할 수 있다. 일부 시스템의 경우 final에서만 temperature compensation을 수행하는 기능 대신 항상 Baro-altimeter를 보정하는 기능을 갖출 수 있다. 해당 기능이 활성화될 경우 다른 항적과의 충돌이 발생할 수 있다. 따라서 조종사는 시스템의 보정 기능을 알고 있어야 한다. 이러한 정보는 그림 4-16의 notes section에서 확인할 수 있다.
FAA는 14 CFR Part 97 instrument approach procedures를 낮은 온도에서 운항할 시 항공기를 위험에 빠뜨리는지 확인하기 위하여 위험 분석을 수행하였다. 해당 연구는 지난 5년간 특정 공항에 대해 기록된 가장 낮은 기온을 적용하였다. 그리고 이러한 non-standard day operations 도중 고도계 오류가 segment altitudes의 ROC(Required Obstacle Clearance)를 초과할 가능성이 있는지를 구체적으로 확인하였다. 접근 구간에서 ROC가 초과될 확률이 1%를 넘는 경우에는 해당 구간에 온도 제한이 적용되었다. 이러한 절차가 필요할 확률이 매우 낮을 뿐만 아니라 장애물 위치에서 ROC가 딱 초과될 확률도 극히 낮으므로 안전 여유도가 훨씬 높아진다.
보고된 공항 온도가 차트의 cold temperature restriction 이하인 경우 조종사는 특정 구간(들)의 “at”, “at or above”, 그리고 “at or below” altitudes를 보정해야 한다.
해당 목록은 http://www.faa. gov/air_traffic/flight_info/aeronav/digital_products/dtpp/ search/의 “Terminal Procedures Basic Search” 하단에서 확인할 수 있다.
temperature compensating이 없는 항공기의 경우 조종사는 ICAO Cold Temperature Error Table을 사용하여 접근의 특정 구간(들)에 대한 저온 고도 보정을 직접 계산 및 적용해야 한다.
공항의 표고로부터 5,000ft를 초과하는 경우에는 ICAO Cold Temperature Error Table의 “height above airport in feet” 열에서 5,000ft를 사용해야 한다. 조종사는 표의 보정 값(들)을 segment altitude(s)에 더한 다음 새로이 보정된 고도를 비행해야 한다. 고도 보정을 수행하기 위해 altimeter setting을 변경해서는 안 된다.
temperature compensating을 갖춘 항공기의 경우 조종사는 고도 보정이 필요한 각 구간에서 시스템이 작동 중인지를 확인해야 한다. 또한 보정된 고도를 항공기가 비행중인지를 확인해야 한다. 시스템이 작동하지 않는 경우에는 ICAO Cold Temperature Error Table을 사용하여 직접 저온 고도 보정을 계산 및 적용해야 한다.
intermediate segment 및/혹은 missed approach final altitude에 저온 보정을 적용하는 경우 조종사는 이를 ATC에 보고해야 한다. 이는 approach clearance를 발부하는 ATC와의 initial contact 시 이루어져야 한다. ATC는 다른 항적과의 적절한 수직 분리를 보장하기 위해 이러한 정보를 필요로 한다. ATC는 MVA(Minimum Vectoring Altitudes)에 대하여 저온 보정을 수행하지 않는다. 조종사는 ATC가 할당한 고도에 저온 보정을 적용해서는 안 되며 radar vector 도중에도 저온 보정을 적용해서는 안 된다(단, ATC가 달리 승인한 경우 제외).
intermediate segment로 향하는 vectors가 조종사가 요청하였던 intermediate segment altitude(온도에 대하여 보정된 고도)보다 낮다면 ATC에 문의해야 한다. 비관제 공항을 향하여 비행하는 경우에는 보정 고도를 self-announce 하는 것이 좋다.
다음은 저온 고도 보정을 적용할 때 조종사와 ATC가 수행하는 교신의 예시이다.
(a) approach clearance를 제공하는 ATC와의 initial contact 시.
Intermediate segment: “Require 10,600ft for cold temperature operations until BEEAR.”
Missed Approach segment: “Require final holding altitude 10,600ft on missed approach for cold temperature operations.”
(b) ATC로부터 계기 접근 절차를 승인받은 경우(“Cleared the RNAV RWY 28 approach(from any IAF).”)
Intermediate Segment: “Level 10,600ft for cold temperature operations inside HIPNA to BEEAR.”
final segment만을 보정하는 경우에는 ATC에 알리지 않아도 된다. 조종사는 보정된 MDA나 DA/DH를 접근의 minimum으로 사용해야 한다. 보정된 MDA나 DA/DH 미만으로 운항하기 위해선 14 CFR Part 91.175의 조건들을 충족해야 한다. MDA 미만으로 하강하는 도중 장애물을 see and avoid 해야 한다. 14 CFR Part 97 RNAV(GPS) 접근 차트와 RNAV(RNP) 접근 차트에서 “Cold Temperature Restricted Airport”의 온도 제한은 “uncompensated baro-VNAV systems”에 대한 온도 제한과 독립적이다. uncompensated baro-VNAV systems에 대한 차트의 온도 제한은 final segment LNAV/VNAV minima에만 적용된다. 이러한 온도 제한은 cold temperature restricted airport의 온도와 관계없이 준수되어야 한다.
상단의 링크에 포함되지 않는 공항의 활주로가 2,500ft 이상인 경우 조종사는 저온 고도 보정을 계산하지 않아도 된다. 저온 조건에서 2,500ft 미만의 활주로로 향하는 조종사는 저온 고도 보정을 수행할 수 있다.
공항들은 ICAO code, Airport Name, Temperature Restriction in Celsius 그리고 affected Segment로 나열된다. 해당 온도가 IAP의 눈송이 기호 옆에 표시된다.
LNAV, LNAV/VNAV and Circling Minimums
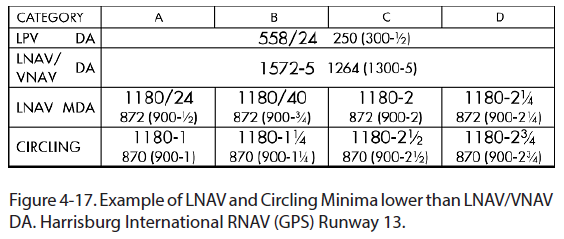
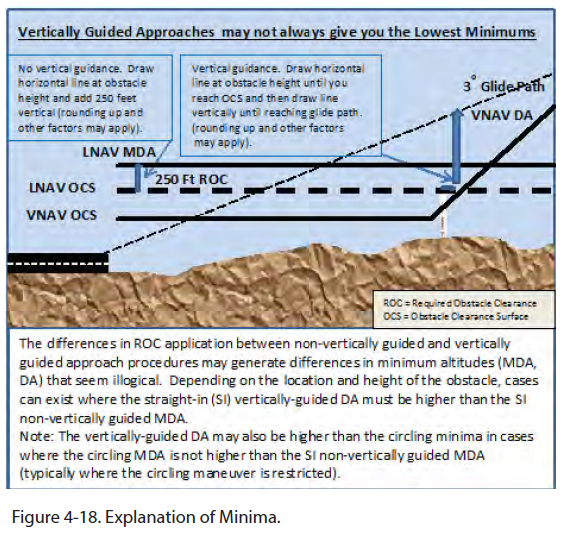
일부 RNAV procedures의 경우 vertically-guided LNAV/VNAV minimums보다 non-precision LNAV minimums가 더 낮다. [그림 4-17] circling procedures 또한 vertically-guided LNAV/VNAV procedure보다 더 낮은 minimums를 가질 수도 있다. 각 RNAV procedure는 개별적으로 평가된다. 각 접근 구간들의 ROC(required obstacle clearance) 수치, OEA(obstacle evaluation area) 면적, 그리고 final segment 유형은 서로 다르다. 그림 4-18이 이러한 차이점을 설명한다.
Airport/Runway Information
접근 브리핑의 또 다른 중요한 부분은 공항 및 활주로에 대한 논의이다. 활주로 길이, 활주로 개방을 위한 유도로, 그리고 주기장까지의 taxi route에 대한 자세한 검토들은 모두 중요한 브리핑 항목이다. 또한 활주로 상태에 대해서도 논의되어야 한다. 활주로가 오염된 경우 이러한 상태가 항공기 성능에 미치는 영향도 고려해야 한다.
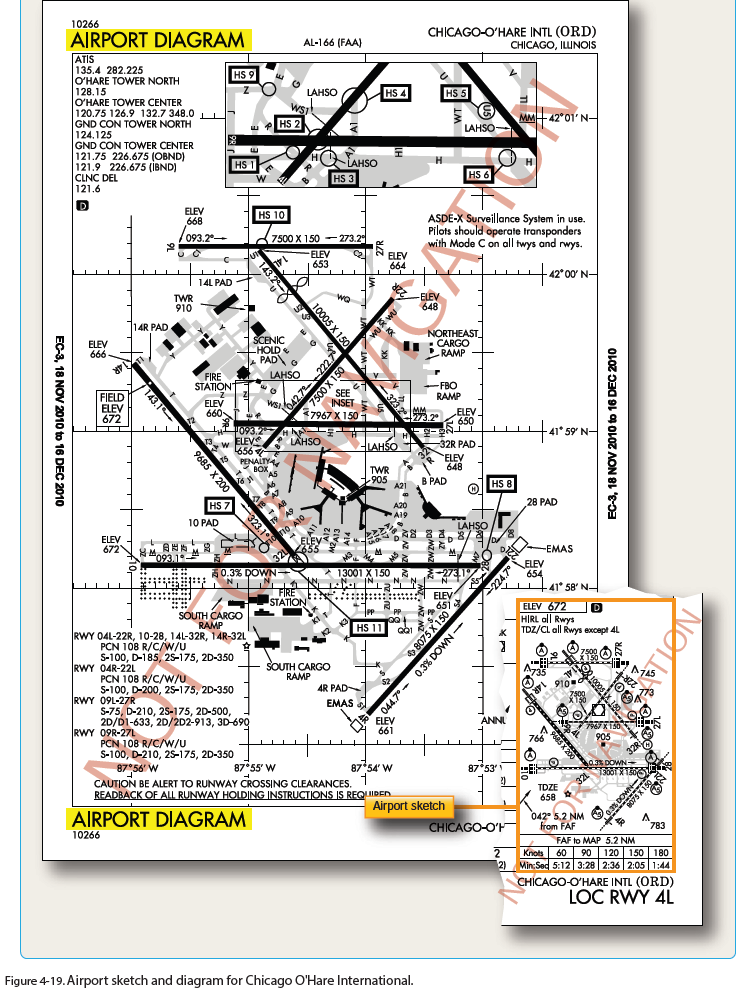
FAA의 접근 차트에는 활주로 그림이 포함되어 있다. 이를 통해 조종사는 중요한 공항 정보를 쉽게 이용할 수 있다. 또한 활주로/유도로 배치가 복잡한 경우에는 별도의 full-page airport diagram이 게재된다.
또한 airport diagram에는 위도/경도 정보가 포함되어 있다. 이는 FMS의 초기 프로그래밍에 필요하다. FMS 초기 설정을 위하여 위도/경도 격자무늬가 각 주기장의 특정 위치를 표시한다. 그림 4-19는 Chicago-O’Hare International Airport (KORD)의 airport sketch와 airport diagram을 보여준다.
철저한 접근 브리핑은 계기 접근의 성공 가능성을 증가시킨다. 대부분의 Part 121, 125, 그리고 135 operators는 IAP briefing에 포함되어야 하는 특정 항목들을, 그리고 그 항목들의 브리핑 순서를 지정한다.
IAP briefing이 시작되기 전에 조종사는 이용 가능한 정보를 통해 어떤 절차가 비행될 가능성이 가장 높은지를 결정해야 한다. ATIS 정보를 갖춘 공항으로 향하는 경우에는 ATIS가 현재 사용 중인 접근을 조종사에게 제공한다. 두 개 이상의 접근이 사용 중인 경우 조종사는 기상, 입항 방향, 게재된 NOTAMs, 그리고 접근 관제시설과의 이전 교신을 기초로 어떤 접근이 발부될지를 추측해야 할 수 있다. 조종사는 어떤 접근이 예상되는지를 ATC에 물어볼 수 있다. 조종사는 언제든 장비의 개별 조건이나 규제 사항을 충족하기 위하여 특정 접근을 요청할 수 있다. 그리고 ATC는 업무량과 항적량이 괜찮다면 이러한 요청을 수용할 수 있을 것이다.
관제탑이 없는 공항으로 비행하는 경우 조종사는 가끔 해당 공항에서 이용가능한 계기 접근들 중 선택권을 가진다. 이 경우 조종사는 기상, 항공기 성능, 입항 방향, 공항 NOTAMs, 그리고 해당 공항에서의 이전 경험을 바탕으로 적절한 접근을 선택하여야 한다.
Navigation and Communication Radios
예상되는 접근 및 활주로가 선택되었다면 각 조종사의 본인의 flight deck을 설정해야 한다. 조종사는 ATIS, 운항관리사(가능한 경우), ATC, 특정 접근 차트, 그리고 기타 이용 가능한 모든 정보원들로부터 모인 정보를 사용한다. 회사의 규정에 따라 특정 사항들이 설정되며 나머지 사항들은 조종사에게 맡겨진다. 일반적으로 대부분의 회사들이 사용하는 기법들은 비슷하다. 이 장에서는 two-pilot operations를 다룬다. single-pilot IFR 비행 도중에도 동일한 항목들이 설정되어야 하며 모든 것들이 정확히 설정되었는지를 확인하기 위해 approach briefing을 수행해야 한다.
미리 설정할 수 있는 항목의 개수는 automation의 수준, 그리고 이용 가능한 항전장치에 따라 달라진다. conventional flight deck의 경우 보통 airspeed bugs(성능 계산에 기초하여 설정), altimeter bug(DA, DH, 혹은 MDA), go around thrust/power setting, radio altimeter bug(항공기에 설치되어 있으며 접근을 위해 필요한 경우), 그리고 navigation/communication radios(standby frequency selector를 사용할 수 있는 경우)만이 설정될 수 있다. PF navigation radio의 standby에는 접근을 위한 primary NAVAID로 설정되어야 한다. 그리고 PM navigation radio standby selector의 경우에는 조종사의 전반적인 상황 인식을 높이기 위하여 primary NAVAID 이외의 NAVAIDs를, 그리고 회사 절차에서 명시하는 NAVAIDs를 설정해야 한다. ADF 또한 접근에서 요구하는 적절한 주파수로, 혹은 조종사가 선택한 적절한 주파수로 조정되어야 한다. 조종사는 설령 vacuum failure나 electrical failure가 발생하여도 최선의 결과로 이어질 수 있도록 계기들을 설정해야 한다. 예를 들어 만약 항공기의 배터리나 비상 전력이 Nav 1만을 작동시킨다면 Nav 1이 final approach를 위한 primary NAVAID로 설정되어야 한다.
Flight Management System(FMS)
glass flight deck과 RNAV(GPS) system을 갖춘 항공기는 conventional flight deck aircraft에서 이용 가능한 항목들 외에도 접근에 대한 final approach course를 설정하는 기능을, 그리고 상황 인식을 높이기 위한 기타 여러 옵션들을 제공한다. FMS를 갖춘 항공기의 조종사들은 접근 유형 및 회사 절차에 따라 FMC(flight management computer)를 설정함으로서 다양한 옵션들을 사용할 수 있다. 보통 PF가 접근에 대하여 FMC를 프로그래밍 하고 PM이 정보를 검증한다. 비행 초반에 프로그래밍 해둔 목적지 공항을 기반으로, 혹은 en route 도중 선택한 새로운 목적지를 기반으로 이용 가능 접근을 선택할 수 있다.
접근에 대해 제공되는 정보의 양은 항공기마다 다르다. 허나 컴퓨터에 프로그래밍 되지 않은 사항이 존재하는 경우 조종사는 이를 수정할 수 있다(예를 들어 MAP를 추가하거나, 혹은 상황 인식 목적만을 위해 전체 접근을 구축할 수 있음). 또한 PF는 하강을 위한 VNAV profile을, 그리고 비행 전에 프로그래밍 되지 않은 LNAV 구간들을(예를 들어 STAR, 혹은 계획하는 접근에 대한 예상 경로) 프로그래밍 할 수 있다. STAR에 대한 모든 crossing restrictions 또한 프로그래밍 되어야 할 수 있다. 가장 일반적인 crossing restrictions(mandatory나 “to be expected”)는 보통 STAR가 선택되었을 때 자동으로 프로그래밍 된다. 허나 이는 ATC로부터 언제든지 변경될 수 있다. 설정되어야할 이 외의 항목들은 특정 항공기 절차마다 달라진다(예를 들어 autopilot, auto-throttles, auto-brakes, pressurization system, fuel system, seat belt signs, anti-icing/deicing equipment, 그리고 igniters).
Autopilot Modes
보통 FMC가 작동하지 않아도 접근을 위해 autopilot을 사용할 수 있다(FMC가 작동하지 않는 상태에서 autopilot 작동이 허가되는지를 확인하기 위해 특정 항공기의 MEL(minimum equipment list)을 참조하라). approach briefing 도중 FMC의 유무와 관계없이 autopilot의 사용에 관하여 논의되어야 한다(특히 altitude pre-selector와 auto-throttles의 사용에 관하여). 특정 항공기의 AFM은 계기 접근 도중 autopilot을 사용하는데 필요한 절차 및 한계를 나타낸다.
항공기를 상승/하강시킬 수 있는 autopilot modes는 매우 다양하다. 몇몇 예시로는 level change(LVL CHG), vertical spped(V/S), VNAV, 그리고 takeoff/go around(TO/GA)가 있다. 조종사는 pitch modes 및/혹은 roll modes를, 그리고 이와 연관된 auto-throttle modes를 선택하여 항공기를 autopilot으로 조종한다. 보통 두 조종사 모두 이러한 패널(종종 mode control panel이라 불림)을 이용할 수 있다. 정교한 auto-flight systems와 auto-throttles를 갖춘 항공기는 대부분 최대 상승 추력으로 상승하는, 그리고 idle throttles로 하강하는 모드를 선택할 수 있다(LVL CHG, FL CHG(flight level change), 그리고 manage level). 또한 해당 장치들은 pre-selected altitudes에서 level off를 수행할 수 있으며 LOC, G/S, 혹은 VOR course를 track할 수 있다. 만약 항공기가 RNAV를 갖추고 있다면 autopilot은 RNAV-generated course도 track할 수 있다. 이러한 모드의 대부분은 autopilot으로 계기 접근을 수행하는 도중 특정 시점에서 사용된다. 또한 이러한 모드들은 항공기를 수동으로 비행하는 조종사에게 FD(flight director) guidance를 제공하기 위해서도 사용될 수 있다.
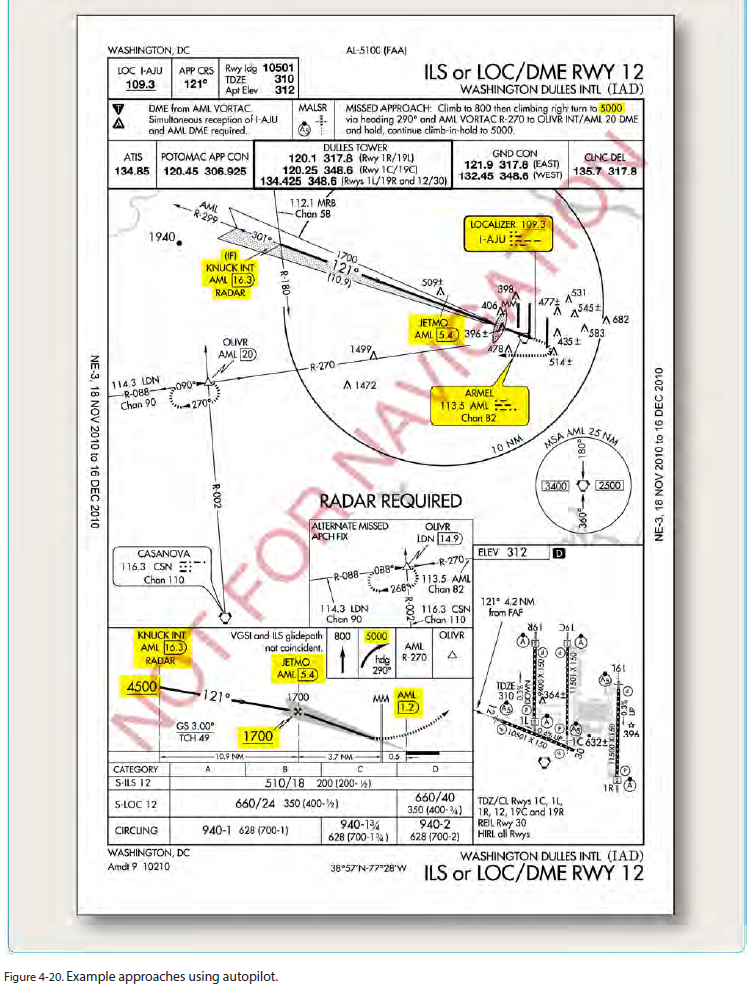
다음은 정밀 접근의 예시이다. 해당 예시에서는 autopilot 활성화 시 auto-throttles가 활성화되며 구체적인 속도 및 외장 변경은 설명되지 않는다. [그림 4-20] PF는 mode control panel의 speed selector를 통해 속도를 제어한다. 그리고 필요한 경우 PM에게 flaps와 landing gear를 요청한다. 비행기는 KNUCK로부터 북서쪽 5NM 및 4,500ft에 위치하며 Rwy 12 LOC inbound를 track 하도록 승인되었다. 현재의 roll modes는 LOC이며 PF의 NAV radio는 LOC 주파수인 109.3으로 동조되어 있다. 그리고 현재의 pitch mode는 altitude hold(ALT HOLD)이다. 접근 관제소가 항공기의 접근을 승인하였다. PF는 false glideslope의 capture를 방지하기 위해 autopilot mode를 바로 변경하지 않았다. 허나 PM은 altitude selector를 1,700ft로 변경한다. pitch mode가 ALT HOLD로 남아있기 때문에 다른 pitch mode가 선택되기 전까지는 항공기가 수평을 유지한다. KNUCK에 도달한 후 PF는 pitch mode로 LVL CHG를 선택하였다. 항공기가 하강을 시작하면 auto-throttles가 idle로 감소된다. 1,700ft 접근 시 pitch mode가 자동으로 altitude acquire(ALT ACQ)로 변화하며 이후 항공기가 1,700ft에서 수평을 잡으면 ALT HOLD로 변화한다. PF는 항공기를 감속하고, 외장 변경을 요청하며, approach mode를 선택한다. roll mode는 계속하여 LOC를 track하고 pitch mode는 ALT HOLD로 유지되며 G/S mode가 arm 된다. false glideslope을 track하는 것을 방지하기 위해 항공기가 FAF altitude에서 수평이 된 다음 APP를 선택하는 것이 권장된다.
stabilized approach를 수행하기 위해 PF는 glideslope 교차 이전에 항공기를 완전한 착륙 외장 상태로 준비해한다. 항공기가 glideslope를 교차하면 pitch mode가 G/S로 변화한다. autopilot이 glideslope를 capture한 후 PM은 PF의 요청에 따라 altitude pre-selector에 missed approach altitude를 선택할 수 있다. 항공기는 계속하여 glideslope을 track한다. PF가 autopilot을 해제하도록 승인되는 최소 고도는 항공기마다 다르다. CAT I approach 도중 PF는 이러한 고도에 도달하기 전에 autopilot을 해제할 수 있다. initial missed approach는 보통 FD guidance와 함께 수동으로 비행된다(단, CAT II approach나 CAT III approach 도중 auto-land가 활성화된 경우 제외).
해당 예시의 비정밀 접근을 비행하는 경우 항공기가 1,700ft에서 수평을 잡은 이후부터 차이가 발생한다. ALT HOLD가 지시되면 PM은 PF의 요청에 따라 MDA를 설정한다. MDA에 대해 정확한 고도를 설정하는 것은 매우 중요하다. 그래야만 항공기가 의도치 않게 MDA 아래로 하강하지 않는다. altitude pre-selector가 100ft 단위로만 설정될 수 있는 항공기의 경우 해당 접근의 MDA를 660ft 대신 700ft로 설정해야 한다.
정교한 하강 제어를 위해 FAF부터 vertical speed mode를 사용한다. 만약 조종사가 altitude pre-selector window에 MDA를 설정하지 않았다면 PF는 V/S를 입력할 수 없으며 항공기는 수평을 유지한다. 항공기가 700ft에서 수평을 잡으면 autopilot mode가 ALT ACQ에서 ALT HOLD로 변경된다. ALT HOLD가 지시되면 PF는 altitude pre-selector window에 missed approach altitude(5,000ft)가 설정되도록 요청한다. 실패접근 도중 MDA가 window에 남아있을 경우 PF가 정확한 FD guidance를 이용할 수 없으므로 이 단계는 매우 중요하다.
IMC에서 조종사는 적절히 항공기를 기동하기 위해(혹은 autopilot 성능을 모니터링 하기 위해), 그리고 결심 지점(DA, DH, MAP)에서 적절한 행동 방침을 결정하기 위해 접근 도중 계속적으로 계기 정보를 평가해야 한다. 접근 도중 상당한 속도와 외장 변화는 상황 인식을 저하시키며 결심 지점에서 취해야할 행동 결정을 복잡하게 만든다. 저속에서의 후퇴익 조작 특성과 터보제트의 느린 엔진 반응은 접근 및 착륙 중인 조종사 업무를 더욱 복잡하게 만든다. 조종사는 결심 지점에 도달하기 전에 접근의 성공 가능성에 대하여 결정을 내려야 한다. 의사 결정 절차를 위해선 조종사는 course나 glideslope/glidepath의 중심선으로부터 벗어났는지를 결정할 수 있어야 하고, 계기를 참조하여 항공기의 3차원 비행경로를 투영할 수 있어야 하며, 원하는 접근 경로를 달성 및 유지하기 위해 필요한 조종을 적용할 수 있어야 한다. 이러한 절차는 접근의 최종 단계에서 일정한 접근 속도, 하강률, 수직 비행경로, 그리고 외장을 유지함으로서 간단해질 수 있다. 이를 stabilized approach concept라 부른다.
stabilized approach는 안전한 터보제트 운영을 위해 필수적이다. 상업용 터보제트 운영자들은 stabilized approaches로 이어지는 절차들을 수립 및 사용해야 한다. 또한 stabilized approach는 프로펠러 항공기와 헬리콥터에서도 매우 권장된다. 낮은 고도에서는 업무에 악영향을 미치지 않되 쉽게 수행될 수 있는 수준으로 외장 변경을 제한해야 한다. 터보제트의 경우 다음과 같은 minimum stabilized approach heights 미만으로 하강하기 전에 landing/circling을 위한 외장 상태에 있어야 하고, 필요한 경우 엔진이 spooled up 상태여야 하며, 1,000fpm 미만의 하강률과 함께 정상 속도 및 비행경로에 놓여야 한다:
속도에 있어야 한다.
∙IFR weather conditions에서 straight-in approaches나 contact approaches를 수행하는 경우에는 공항이나 TDZE으로부터 1,000ft 미만으로 하강하기 전에 접근이 안정되어있어야 한다.
• VFR weather conditions에서 straight-in approaches나 visual approach를 수행하는 경우에는 공항 표고로부터 500ft 미만으로 하강하기 전에 접근이 안정되어있어야 한다.
• circling approach maneuver의 최종 단계인 경우에는 공항 표고로부터 500ft나 MDA 중 낮은 고도에서 접근이 안정되어야 한다. 이러한 상태가 touchdown 전까지 접근 내내 유지되어야 stabilized approach로 간주된다. 또한 이는 접근 도중 비정상적인 징후가 존재할 때 wind shear를 인지하는데 도움을 제공한다.