1. ARTCC는 특정 주파수를 통해 IFR 항공기와 직접 교신할 수 있다. VHF 송수신기와 UHF 송수신기로 구성된 RCAG(Remote Center Air/Ground) sites를 통해 최대 교신 범위가 이루어질 수 있다. 비록 RCAG sites는ARTCC와 수백 마일 떨어져있을 수 있지만 이는 유선이나 마이크로파 링크를 통해 ARTCC로 원격 전송된다. IFR operations는 직접 교신을 통해 처리되므로 조종사는 IFR 항공기의 관제와 관련된 교신만을 위해 해당 주파수를 사용해야 한다. 비행 계획서 제출, en route 기상, 기상 예보, 그리고 이와 유사한 정보는 FSS, company radio, 혹은 적절한 군사 시설에 요청되어야 한다.
2. ARTCC는 sector로 나뉜다. 각 sector는 한 명의, 혹은 한 팀의 관제사에 의해 처리된다. 그리고 각 sector는 개별적인 sector discrete frequency를 가진다. 비행이 한 sector에서 다른 sector로 진행될 경우 조종사는 적절한 sector discrete frequency로 변경하도록 요청 받는다.
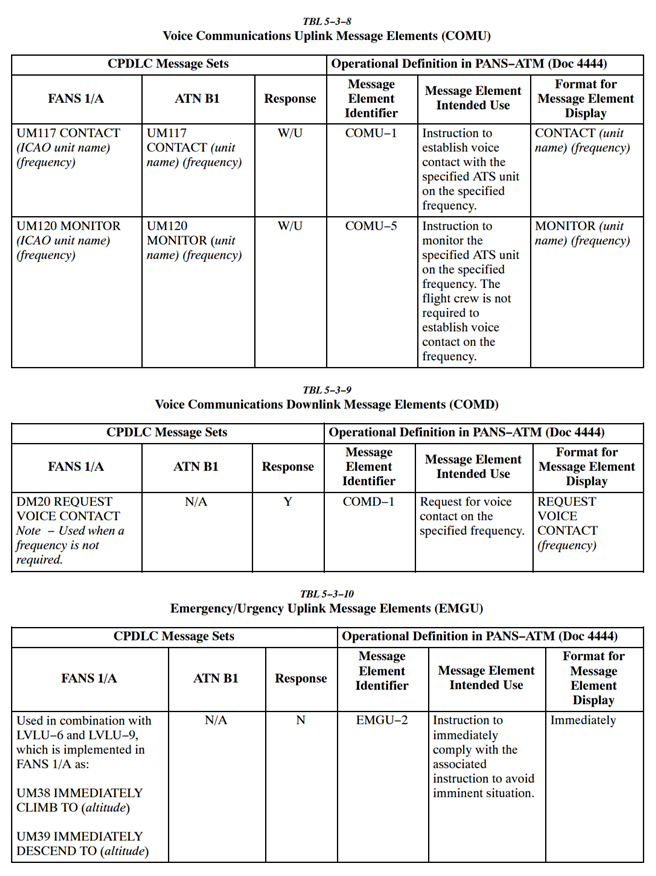
3. CPDLC(Controller Pilot Data Link Communications)는 공중/지상 음성 교신을 보완하는 시스템이다. CPDLC의 주된 운영 기준은 다음과 같다:
(a) 음성 교신은 여전히 기본적인 공중/지상 교신 수단이다.
(b) 메시지의 업링크/다운링크를 위해선 적절한 CPDLC 항전 장비가 필요하다.
(c) En Route CPDLC Initial Services는 다음 서비스를 제공한다: AS(Altimeter Setting), TOC(Transfer of Communications), IC(Initial Contact), limited route assignments(airborne reroutes(ABRR) 포함), limited altitude assignments, 그리고 emergency messages.
(1) altimeter settings는 Monitor TOC 이후 자동으로 업링크 된다. 또한 업링크 된 고도 할당이 FL 180 미만인 경우에도 altimeter setting이 자동으로 업링크 된다. 또한 관제사가 직접 altimeter setting 메시지를 전송할 수도 있다.
NOTE-
계기 접근 절차를 수행하는 경우 조종사는 적절한 altimeter setting을 수신 및 사용할 책임이 있다(14 CFR Section 97.20). 이 경우 CPDLC로 발부받은 altimeter setting은 제외된다.
(2) initial contact는 조종사의 altitude downlink 메시지와 ATC automation system의 aircraft’s stored altitude를 비교하는 과정이다. IC mismatch, 혹은 CAA(Confirm Assigned Altitude) downlink time-out indicator가 FDB(Full Data Block)와 ACL(Aircraft List)에 표시되는 경우 관제사는 음성 교신을 통해 항공기에 할당된 고도를 확인해야 하며 IC mismatch/time-out indicator를 알려야 한다.
(3) transfer of communications는 다음 sector와의 데이터 링크 접속을 자동으로 설정한다.
(4) menu text 송신은 nontrajectory altering uplink 메시지를 포함한다.
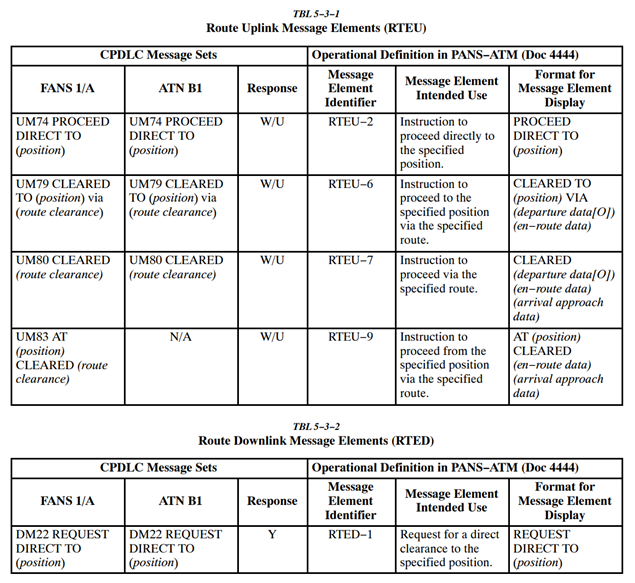
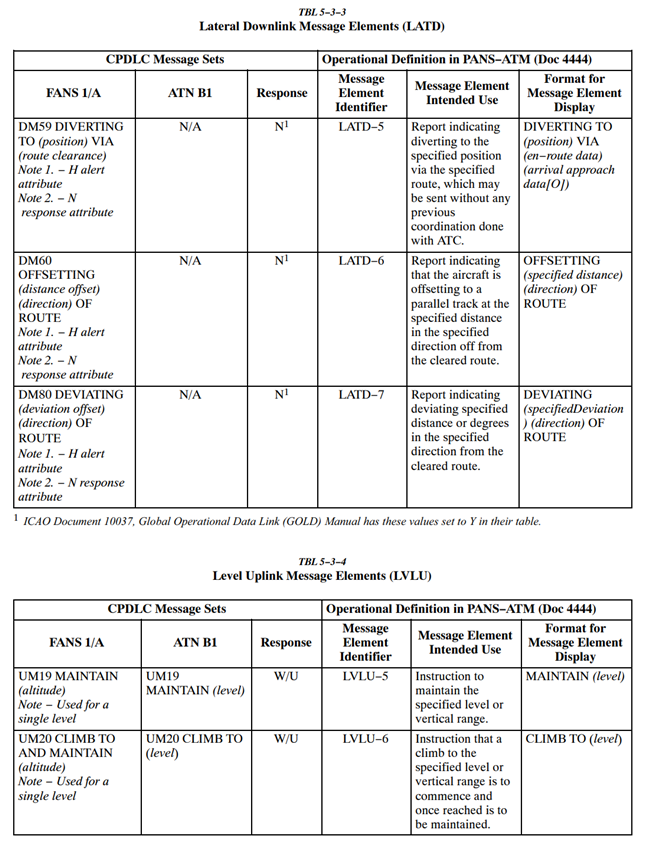
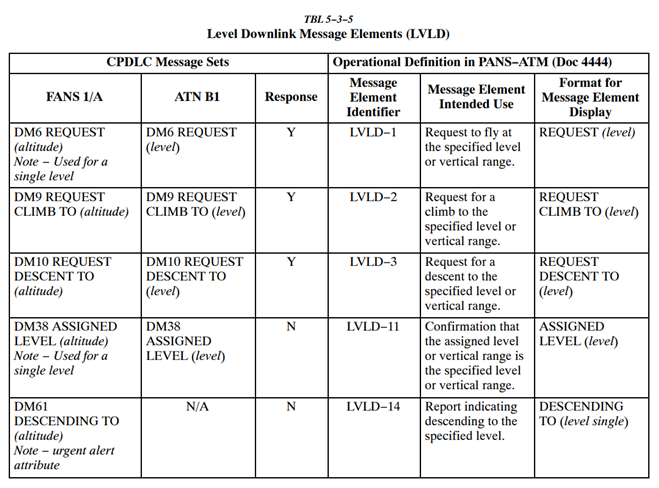
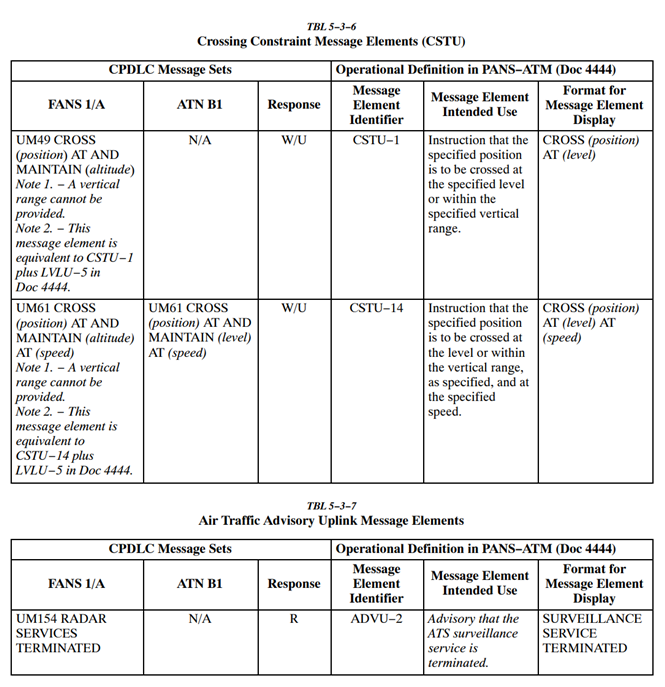
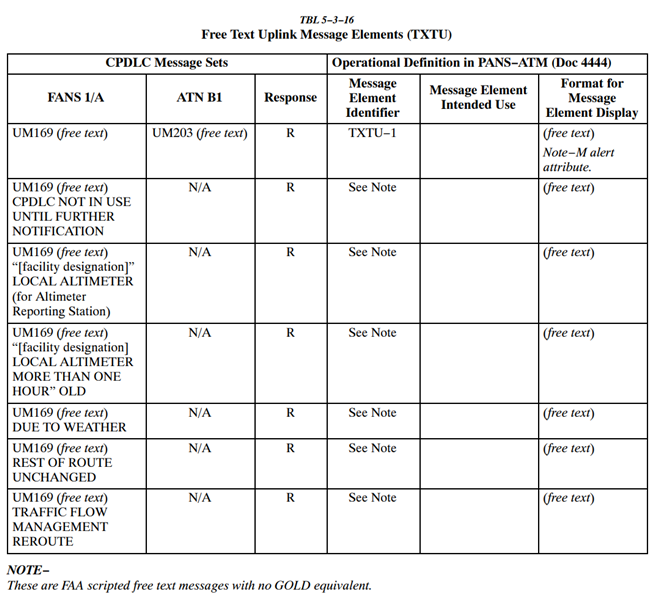
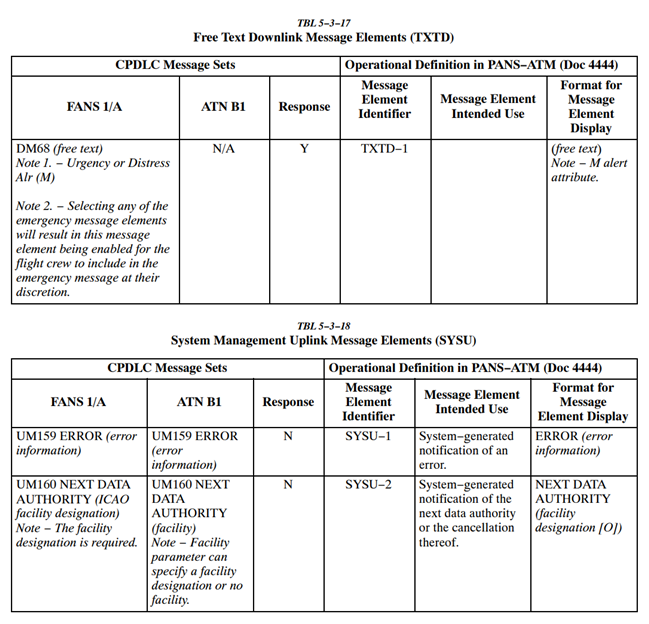
(5) CPDLC Message Elements를 위해 아래의 표 5-3-1 ~ 5-3-19를 참조한다.
NOTE-
FAA는 ATN B1을 구현하지 않는다. 표의 ATN B1은 정보 제공을 위해 표시되었다.
b. ATC Frequency Change Procedures.
1. 관제사는 주파수 변경을 위해 다음과 같은 문구를 사용한다:
EXAMPLE-
(Aircraft identification) contact (facility name or location name and terminal function) (frequency) at (time, fix, or altitude).
NOTE-
조종사는 특정 time, fix, 혹은 altitude에 도달하기 전까지는 현재의 주파수를 계속 청취해야 한다. 주파수 변경이 바로 수행되어야 한다면 ATC는 주파수 변경 제한 사항을 생략한다.
2. 특정 시설과의 교신을 설정하기 위해 조종사는 다음과 같은 문구를 사용해야 한다:
(a) radar environment에서 운영 중인 경우: initial contact 시 조종사는 “level”이라는 단어와 함께 항공기에 할당된 고도를 관제사에게 알려야 한다. 혹은 해당하는 경우 “climb to”나 “descending to”라는 단어와 함께 항공기에 할당된 고도를 알리며 항공기가 현재 떠나는 고도 또한 알린다.
EXAMPLE-
1. (Name) CENTER, (aircraft identification), LEVEL (altitude or flight level).
2. (Name) CENTER, (aircraft identification), LEAVING (exact altitude or flight level), CLIMBING TO OR DESCENDING TO (altitude or flight level)
NOTE-
예시의 exact altitude or flight level란 가장 가까운 100ft 단위의 고도를 의미한다. 해당 정보를 통해 ATC는 분리를 위하여 Mode C altitude information을 사용할 수 있는지를 판단한다.
(b) nonradar environment에서 운영 중인 경우:
(1) initial contact 시 조종사는 현재 위치, 고도, 그리고 다음 보고 지점에 대한 예상 시간을 관제사에게 알려야 한다.
EXAMPLE-
(Name) CENTER, (aircraft identification), (position), (altitude), ESTIMATING (reporting point) AT (time).
(2) initial contact 후 위치 보고를 수행할 때 조종사는 완전한 위치 보고를 제공해야 한다.
EXAMPLE-
(Name) CENTER, (aircraft identification), (position), (time), (altitude), (type of flight plan), (ETA and name of next reporting point), (the name of the next succeeding reporting point), AND (remarks).
REFERENCE-
AIM, Para 5−3−2, Position Reporting.
3. 때때로 관제사는 조종사로 하여금 특정 고도에 있는지 확인하도록 요청한다. 이때 사용되는 용어는 “VERIFY AT (altitude)”이다. 조종사는 관제사가 명시한 고도에 항공기가 위치하는지를 확인해야 한다. 그렇지 않은 경우 조종사는 현재 유지하고 있는 고도를 관제사에게 알려야 한다. 상승/하강 도중에는 관제사가 “VERIFY ASSIGNED ALTITUDE AS (altitude)”라 요청할 수 있다. 조종사는 해당 고도가 할당받았던 고도와 일치하는지를 확인해야 한다. 그렇지 않은 경우 조종사는 할당받았던 고도를 관제사에게 알려야 한다.
CAUTION-
조종사는 그들의 실제 고도를, 혹은 할당받았던 고도를 관제사가 확인 요청을 위해 명시한 고도로 변경해서는 안 된다(단, 관제사가 변경을 승인한 경우 제외).
c. ARTCC Radio Frequency Outage. ARTCC는 보통 각 주파수에 대해 적어도 하나의 백업 라디오 송수신기를 갖추고 있다. 해당 시스템들은 매우 신속하게 사용될 수 있다. 기술적 문제로 인해 라디오 전환에 지연이 발생할 수도 있지만 60초를 초과하는 경우는 거의 없다. 만약 서비스 중단이 신속하게 해결되지 않으리라 판단될 경우 ARTCC는 인접 항공기에게 중단이 발생한 주파수로 변경하도록, 그리고 교신 지침을 방송하도록 요청한다. 따라서 조종사는 ARTCC 서비스가 실제로 중단되었는지를 판단하기 전에 최소 1분을 기다려야 한다. 이러한 서비스 중단이 발생하였을 때 만약 장비가 허용한다면 조종사는 중단이 발생한 주파수를 계속 감청해야 한다. 이와 동시에 조종사는 다음의 권장 교신 절차를 준수하려 시도해야 한다:
1. 주파수 변경 후 ARTCC와 양방향 교신이 설정되지 않는 경우 조종사는 대체 주파수나 기타 지침을 할당받기 위해 이전 관제사와 다시 교신해야 한다.
2. 양방향 교신이 설정된 후 ARTCC와의 무선 교신 두절이 발생한 경우 조종사는 이 외의 ARTCC 주파수(가능하다면 다음 sector의 주파수)를 통해 center와 교신해야 한다. 경로를 따른 다음 주파수 변경이 다른 ATC 시설을 수반하는 경우에는 해당 시설과 교신해야 한다. 두 가지 방법 중 하나를 통해 교신을 다시 설정할 수 없는 경우에는 FSS에 교신 지침을 요청해야 한다.
NOTE-
FSS를 통해 항공기와 ARTCC 간에 정보를 교환하는 것은 company radio를 통해 정보를 교환하는 것보다 빠르다. 왜냐하면 FSS는 ARTCC sector와의 직접 회선을 가지고 있기 때문이다. 따라서 ARTCC 주파수 중단 상황에서는 FSS를 사용하는 것이 권장된다.
d. Oakland Oceanic FIR. Oakland Oceanic FIR(KZAK)에서 CPDLC와ADS-C를 사용하는 것은 Inmarsat customer와 Iridium customer에게만 승인된다. 다른 모든 형태의 데이터 링크 접속은 승인되지 않는다. 사용자는 항공기에 어떤 위성 매체가 장착되어 있는지를 나타내기 위해 ICAO FPL의 Item 10a에 적절한 data link code를 입력해야 한다. Inmarsat의 식별자는 J5이고 Iridium의 식별자는 J7이다. 만약 ICAO FPL에 J5나 J7이 포함되지 않으면 KZAK에 의해 LOGON이 거부되며 항공기는 연결될 수 없을 것이다.
e. New York Oceanic FIR. New York Oceanic FIR(KZWY)에서 CPDLC와 ADS-C를 사용하는 것은Inmarsat customer와 Iridium customer에게만 승인된다. 다른 모든 형태의 데이터 링크 접속은 승인되지 않는다. 사용자는 항공기에 어떤 위성 매체가 장착되어 있는지를 나타내기 위해 ICAO FPL의 Item 10a에 적절한 data link code를 입력해야 한다. Inmarsat의 식별자는 J5이고 Iridium의 식별자는 J7이다. 만약 ICAO FPL에 J5나 J7이 포함되지 않으면 KZWY에 의해 LOGON이 거부되며 항공기는 연결될 수 없을 것이다.
관제의 안전성과 효율성은 정확한 위치 보고에 달려있다. ATC가 적절한 분리를 제공하기 위해선, 그리고 신속한 항공기 이동을 제공하기 위해선 IFR 비행 계획서로 운영 중인 모든 항공기의 진행 상황을 정확하게 추정할 수 있어야 한다.
a. Position Identification.
1. VOR을 통과할 때 위치 보고가 이루어져야한다면 “to/from” indicator가 역방향이 되었을 때의 시간을 보고해야 한다.
2. ADF를 이용하여 위치 보고가 이루어져야한다면 indicator가 역방향이 되었을 때의 시간을 보고해야 한다.
3. reporting point를 통과할 때의 시간을 결정하기 위해 aural indication이나 light panel indication을 사용하는 경우(예를 들어 fan marker, Z marker, cone of silence, 혹은 intersection of range courses) 신호가 처음 수신된 때와 중단된 때를 확인하여야한다. 이 두 시간 사이의 중간 값이 fix 상공에서의 실제 시간으로 간주된다.
4. reporting point로부터의 거리/방향과 관련하여 위치가 지정된 경우 거리/방향을 최대한 정확하게 계산해야 한다.
5. ATC는 보통 비행이 수행되는 구조에서 사용되도록 설정되지 않은 보조 기구를 기준으로 위치 보고나 항법을 수행하라 요구하지 않는다(단, terminal area 전환이 목적인 경우 제외).
b. Position Reporting Points. CFR은 조종사가 적절한 주파수를 계속하여 청취할 것을 요구한다. 그리고 subparagraph c의 규정에 따라 운영되는 경우를 제외하고는 특정 reporting points를 통과한다는 위치보고를 제공해야 한다. reporting points는 en route charts 상에 기호로 표시된다. compulsory reporting point의 기호는 검은색 삼각형이다.
“on request” reporting point 기호는 흰색 삼각형이다.
“on request” reporting point의 경우 ATC가 요청할 때에만 보고가 필요하다.
c. Position Reporting Requirements.
1. Flights Along Airways or Routes. 모든 항공기는 고도에 상관없이 비행경로를 따라 위치하는 compulsory reporting point를 통과할 때 위치보고를 해야 한다(“VFR-on-top” ATC clearance로 비행하는 항공기 포함).
2. Flight Along a Direct Route. altitude/flight level에 상관없이 조종사는 route of flight를 규정하기 위해 비행 계획서에 사용된 각 reporting point에서 반드시 보고를 해야 한다(“VFR-on-top” ATC clearance로 비행하는 항공기 포함).
3. Flights in a Radar Environment. “Radar Contact”라 ATC가 알린 경우 조종사는 reporting points에서의 위치보고를 중단한다. ATC가 “RADAR CONTACT LOST”, 혹은 “RADAR SERVICE TERMINATED”라 알린 경우 조종사는 위치보고를 재개해야 한다.
※ Pilot/Controller Gloosary
RADAR CONTACT - 항공기가 ATC surveillance source를 통해 식별되었으며 레이더 서비스가 종료되기 전까지 radar flight following이 제공될 것임을 알리기 위해 ATC가 사용하는 용어. radar service는 필요한 경우에만, 그리고 운영 가능한 범위 내에서만 제공될 수도 있다. "radar contact"을 통지받은 조종사는 compulsory reporting points에서의 보고를 중단한다.
4. Flights in an Oceanic(Non-radar) Environment. route of flight를 규정하기 위해 비행 계획서에 사용된 각 reporting point에서 반드시 보고를 해야 한다(설령 항공 차트상에 “on request” (non-compulsory) reporting point로 표시되어있다 하더라도). ADS-C(Automatic Dependent Surveillance-Contract) logon을 통해 자동으로 위치보고를 제공하는 항공기의 경우에는 음성 위치보고를 중단한다.
NOTE–
다음의 경우 ATC는 “radar contact”라 조종사에게 알릴 것이다:
(a) 항공기가 ATC 시스템에 식별된 경우
(b) radar service terminated 이후, 혹은 radar contact lost 이후 레이더 식별이 다시 이루어진 경우.
관제사로부터 radar contact가 이루어졌다는 통보를 받은 후 이러한 사실은 다른 관제사에게 이양되었을 때 조종사에게 반복되지 않는다. 관제를 이양받은 관제사는 가끔 항공기의 신원을 확인한다. 허나 이를 radar contact lost로 해석해서는 안 된다. 트랜스폰더 장착 항공기의 신원 확인을 위해 관제사는 조종사에게 “ident”, “squawk standby” 혹은 코드 변경을 요청할 것이다. 트랜스폰더가 없는 항공기의 경우 신원 확인을 위해 관제사는 항공기의 위치를 알릴 것이다. 만약 관제사가 알린 위치가 현재 위치와 일치하지 않는다면 조종사는 이를 알려야 한다. 관제사가 참조하는 NAVAID로 항공기가 동조되어있지 않아 해당 위치 정보의 정확성을 확인할 수 없는 경우 조종사는 항공기에 동조된 NAVAID로부터의 레이더 위치를 요청해야 한다.
d. Position Report Items:
1. 위치보고는 다음 항목들을 포함해야 한다:
(a) 식별부호
(b) 위치
(c) 시간
(d) altitude/flight level(VFR-on-top clearance로 운영 중인 경우에는 실제 altitude/flight level)
(e) 비행계획서 형식(ARTCC나 approach control에 직접 IFR 위치보고를 하는 경우에는 필요하지 않음)
(a) 이전에 할당된 altitude/flight level을 떠나 새로이 할당된 altitude/flight level로 향할 때.
(b) VFR-on-top clearance로 운영 도중 고도를 바꿀 때.
(c) 최소 500fpm으로 상승/하강 할 수 없을 때.
(d) 실패접근을 하였을 때(이 경우 특정 조치를 위한 clearance를 요청한다. 예를 들어 교체비행장, 다른 접근, 등등)
(e) 비행 계획서에 제출된 평균 진대기속도(순항 고도에서의)가 5%나 10노트 중 더 큰 값으로 변화할 때.
(f) 할당받은 holding fix/point에 도달하였을 때의 시간과 altitude/flight level.
(g) 할당받은 holding fix/point를 떠날 때.
NOTE–
레이더 서비스가 제공되고 있는 경우 military terminal area facilities에서 계기 훈련 중인 조종사는 (f)와 (g)를 생략할 수 있다.
(h) 관제 공역 내에서 VOR∙TACAN∙ADF∙low frequency navigation receiver의 기능이 상실된 경우, installed IFR-certified GPS/GNSS receivers의 GPS 이상이 발생한 경우, ILS receiver의 기능이 전체적/부분적으로 상실된 경우, 또는 공대지 교신 기능 상실된 경우. 보고에는 항공기 식별부호, 영향을 받는 장비, IFR로 운영할 수 있는 능력이 손상된 정도, 그리고 ATC에 요청하는 지원의 특성 및 범위가 포함되어야 한다.
NOTE-
1. 이 외의 장비 또한 IFR로 운영할 수 있는 능력 및/혹은 안전을 해칠 수 있다. 이러한 장비(예를 들어 airborne weather radar)의 고장이 발생하였으며 해당 고장이 IFR 능력이나 안전에 영향을 미칠 것이라 조종사가 판단한 경우 위와 같이 보고해야 한다.
2. GPS 이상을 보고할 경우 이상이 발생한 위치와 고도를 포함한다. 위치는 구체적으로 설명되어야 한다. 필요하다면 이상이 발생한 기간을 포함한다.
(i) 비행 안전과 연관된 정보들.
2. radar contact이 되어있지 않은 경우 해야 하는 보고.
(a) 비정밀 접근 도중 final approach fix를 떠날 때. 정밀 접근 도중에는 outer marker(혹은 outer marker 대신 사용되는 fix)를 떠날 때.
(b) 이전에 제출하였던 예정시간으로부터 2분을 초과하는 오차가 발생하리라 판단한 경우 새로운 예상시간을 보고해야 한다. 북대서양(NAT)을 비행할 때 3분을 초과하는 오차가 발생하리라 판단한 경우 새로운 예상시간을 보고해야 한다.
b. 예보되지 않은 기상을 조우한, 혹은 예보된 위험 기상을 조우한 조종사는 이러한 기상을 ATC에 보고해야한다.
a. 세 가지 route systems가 항법 목적을 위해 설정된다. 이들은 Federal airway system(VOR route와 L/MF route로 구성), jet route system, 그리고 RNAV route system이다. 이러한 route systems는 서로 간의 전환을 용이하게 만들기 위해 최대한 중첩되는 방식으로 정렬된다.
1. VOR and L/MF(nondirectional radio beacons) Airway System은 지표면으로부터 1,200ft(혹은 일부 경우에는 더 높음)에서 18,000ft MSL 미만으로 설정된 항로들로 구성된다. 이러한 항로들은 IFR Enroute Low Altitude Charts에 표시된다.
NOTE-
victor airway의 고도 한계를 초과해서는 안 된다(단, route structure 내에서의, 혹은 route structure간의 전환을 수행하는 경우 제외).
(a) VOR 항로는 VOR, 혹은 VORTAC 항법 보조 시설만을 기반으로 한다(단, 알래스카 제외). 이는 항공 차트에 검정색으로 표시되며 “V”(Victor)와 항로 번호로 식별된다(예를 들어 V12).
NOTE-
알래스카의 VOR airway 구간은 L/MF 항법 보조 시설을 기반으로 한다. 이는 en route charts에 검정색 대신 갈색으로 표시된다.
(1) 두 개 이상의 경로가 일치하는 항로 구간의 경우 해당 구간과 일치하는 모든 항로의 번호가 포함된다. 이 경우 조종사는 비행 계획서의 route에 해당하는 항로 번호만 표시하면 된다.
NOTE-
VOR 시설을 이용하여 항로를 비행하려는 조종사는 비행 계획서에 “victor” airway(s)를 명시하기만 하면 된다. 예를 들어 omnirange만을 사용하여 시카고에서 뉴올리언스까지 8,000ft로 비행하고자 하는 경우 route는 다음과 같을 수 있다: “departing from Chicago−Midway, cruising 8,000 feet via Victor 9 to Moisant International.” 일부는 L/MF 항법 보조 시설을 통해, 그리고 일부는 omnirange를 통해 비행하고자 하는 경우에는 비행 계획서에 적절한 항로들을 상술한다. 이는 routes를 따라 어떤 유형의 시설이 사용될 것인지를 나타내며 ATC로 하여금 traffic clearance를 발부할 수 있게 해준다. 또한 비행이 통과하는 station을 명시함으로서 route를 설명할 수도 있다. 허나 많은 VOR과 L/MF 보조 시설들의 이름이 동일하므로 특정 위치에서 어떤 항법 보조 시설을 사용할 것인지 표시하는데 주의해야 한다. 이는 비행 계획서의 route of flight에 위치 명칭과 시설 종류를 명시함으로써 지시될 수 있다(예를 들어, Newark L/MF, Allentown VOR).
(2) 위치 보고와 관련하여 VOR Airway Systems에는 reporting points가 지정되어 있다. Victor Airway를 사용하는 항공편은 이러한 지점들에서 보고를 할 것이다(단, ATC가 달리 지시한 경우 제외).
(b) L/MF 항로(colored airway라고도 불림)는 L/MF 항법 보조 시설만을 기반으로 한다. 이는 항공 차트에 갈색으로 표시되며 색깔의 명칭과 번호로 식별된다(예를 들어 Amber One). Green airway와 Red airway는 동쪽과 서쪽으로 표시된다. Amber airway와 Blue airway는 북쪽과 남쪽으로 표시된다.
(c) 알래스카의 경우 TSO-C145(as revised)나 TSO-C146(as revised) GPS/WAAS 항법 시스템이 ATS(air traffic service) routes의 유일한 항법 수단으로 허용된다. 이러한 routes는 두 번째 MEA(minimum en route altitude)가 지정된 Victor, T-Routes, 그리고 colored airway를 포함한다. 이 고도는 파란색으로 표시되며 뒤에 문자 G가 따른다. 이러한 고도는 route 구간을 규정하는 지상 기반 항법 시설의 MRA(minimum reception altitude) 미만이며 표준 en route obstacle clearance와 two-way communications를 보장한다. 운영 기준(operations specifications)을 필요로 하는 air carrier operators는 FAA 운영 기준에 따라 해당 route를 운항할 수 있는 권한이 있다.
2. jet route system은 18,000ft 이상 FL 450 이하로 설정된 jet routes로 구성된다.
(a) 이러한 routes는 Enroute High Altitude Charts에 표시된다. Jet routes는 항공 차트에 검정색으로 표시되며 “J”(Jet)와 항로 번호로 식별된다(예를 들어 J12). Jet routes는 VOR airways와 마찬가지로 VOR이나 VORTAC 항법 시설만을 기반으로 한다(단, 알래스카 제외).
(ATP: 차트의 Jet routes에 MAA가 설정되어 있지 않다면 MAA는 45,000ft이다.)
NOTE-
알래스카의 jet routes 구간은 L/MF 항법 보조 시설을 기반으로 한다. 이는 en route charts에 검정색 대신 갈색으로 표시된다.
(b) 위치 보고와 관련하여 jet route systems에는 reporting points가 지정되어 있다. jet routes를 사용하는 항공편은 이러한 지점들에서 보고를 할 것이다(단, ATC가 달리 지시한 경우 제외).
3. Area Navigation(RNAV) Routes.
(a) RNAV 기능을 갖춘 항공기는 en route charts, Advisory Circulars, NOTAM 등등에 명시된 제한 사항이나 필요조건에 따라 RNAV routes(Q-routes, T-routes, 그리고 Y-routes 포함)를 사용할 수 있다. RNAV routes는 항공 차트에 파란색으로 표시된다. 이들은 “Q”, “T”, 혹은 “Y”와 항로 번호로 식별된다(예를 들어 Q13, T205, 그리고 Y280). 차트에 게재되는 RNAV routes는 RNAV 2이다(단, 특별히 RNAV 1로 표시된 경우 제외). 이러한 routes는 AC 90−100A, U.S. Terminal and En Route Area Navigation (RNAV) Operations에서 설명되는 기준을 충족하는 GPS, GPS/WAAS, 혹은 DME/DME/IRU RNAV 시스템 성능을 필요로 한다(단, 달리 명시된 경우 제외).
(1) 18,000ft MSL 이상 FL 450 이하의 RNAV 항공기는 Q-routes를 사용할 수 있다. Q-routes는 Enroute High Altitude Charts에 표시된다.
NOTE-
알래스카의 항공기는 ATC(Air Traffic Control) 레이더 감시 하에 있는 동안 GPS(TSO-C129(as revised)나 TSO-C196(as revised))를 사용하는 경우에만, 혹은 ATC 레이더 감시를 필요로 하지 않는 GPS/WAAS를 사용하는 경우에만 GNSS Q-routes를 운영할 수 있다.
(2) GPS나 GPS/WAAS를 장비한 항공기는 T-routes를 사용할 수 있다. 이는 지표면으로부터 1,200ft(혹은 일부 경우에는 더 높음)에서 18,000ft MSL 미만으로 설정된 항로들로 구성된다. T-routes는 Enroute Low Altitude Charts에 표시된다.
NOTE-
알래스카의 항공기는 GPS/WAAS(TSO-C145 (as revised)나 TSO-C146 (as revised))를 사용하는 경우에만 GNSS T-routes를 운영할 수 있다.
(3) Y-routes는 일반적으로 U.S. offshore airspace에서 운영된다. 조종사는 항법을 위해 GPS를 사용해야 한다. 그리고 Y-routes에서의 모든 비행 도중 RNAV 2 성능 조건을 만족해야 한다. 운영자는 U.S. Aeronautical Information Publication (AIP), ENR 7.10에서 추가적인 Y-route 조건을 찾을 수 있다.
(b) unpublished RNAV routes는 area navigation 기능을 기반으로 하는 direct routes이다. 이는 위도/경도 좌표나 degree-distance fixes로 규정된 waypoints 사이의 경로이거나, 혹은 established routes/airways로부터 특정 거리/방향으로 offset 된 경로이다. 모든 unpublished RNAV routes에서는 ATC의 radar monitoring이 필요하다(단, 항공기 항법 데이터베이스에서 불러올 수 있는 published waypoints로 승인된 GNSS 항공기의 경우 제외).
(c) MRB(Magnetic Reference Bearing)은 RNAV/GPS/GNSS route의 두 waypoint 사이에 게재된 bearing이다. MRB는 두 waypoints 사이의 true course에 magnetic variation을 적용하여 계산된다. MRB는 하나의 waypoint에서 다른 waypoint로 선회할 때 조종사가compass/HSI/RMI에서 확인해야 하는 reference bearing(no-wind heading)을 나타낸다. 이는 상황 인식을 향상시킨다. 조종사는 이러한 bearing을 참조용으로만 사용해야 한다. 왜냐하면 RNAV/GPS/GNSS 항법 시스템은 waypoints 사이의 true course를 비행하기 때문이다.
b. FL 450 이상에서의 운영은 point-to-point 방식으로 수행될 수 있다. 항법 안내는 enroute high altitude charts에 표시된 시설을 통해 지역 단위로 제공된다.
c. Radar Vectors. 분리 목적이나 소음 방지를 위해, 운영상 이점이 실현되는 경우, 혹은 조종사 요청 시 관제사는 관제 공역 내에서 항공기를 vector 할 수 있다. 관제 공역 바깥에서의 vectors는 조종사 요청 시에만 제공된다. 이전에 할당된 nonradar route를 벗어나게 만드는 vector가 관제사로부터 제공될 경우 조종사는 그 vector의 목적을 조언 받는다. 일반적으로 RNAV routes를 운영하는 경우에는 nonradar route를 계속 비행할 수 있다.
d. 캐나다 영공을 비행하는 경우 조종사는 Canadian Air Regulations를 검토해야 한다.
1. 미국 CFR과 다른 부분을 특히 주의해야 한다.
(a) Canadian Airways Class B airspace가 그 예이다. B 등급 공역은 12,500ft MSL이나 MEA(이 중 더 높은 값) 이상의 모든 controlled low level airspace이다. 이 공역 내에서는 IFR 비행과 controlled VFR 비행만이 허용된다(low level airspace는 Designated Airspace Handbook에서 지정된 공역을 의미한다).
(b) ATC로부터 VFR flight clearance를 발부받지 않는 한 그 누구도 B 등급 공역 내에서 VMC로 항공기를 운항할 수 없다(기상 상태나 지형의 높이에 상관없이).
(c) B 등급 공역 진입 필요조건은 student pilot permit이다(단, 교관의 지도나 통제 하에).
(d) VFR 비행 도중에는 항상 지상이나 수면이 확인되어야 한다.
2. 캐나다의 VOR airways와 high level routes의 구간은 L/MF 항법 보조 시설을 기반으로 한다. 이는 en route charts에 파란색 대신 갈색으로 표시된다.
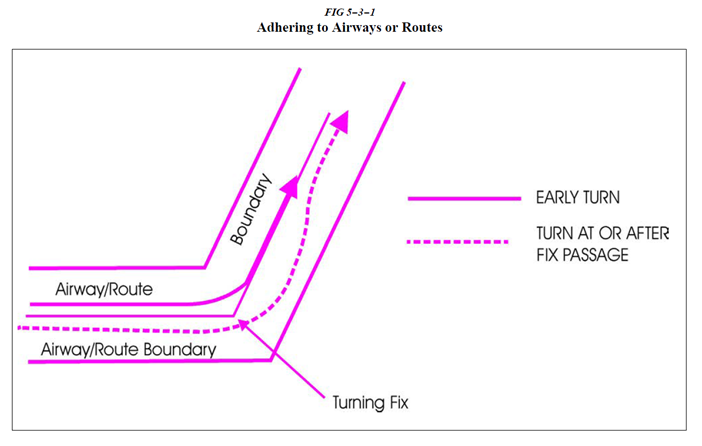
a. 조종사는 비행하는 airways나 routes를 준수해야 한다. 특히 course 변경 도중 이를 준수하기 위해선 주의를 기울여야 한다. course 변경은 변수들을 포함한다. 각각의 course 변경 시 적용할 수 있는 기술은 조종사만이 해결할 수 있는 문제이다. 고려해야할 몇몇 변수들로는 선회 반경, 바람의 영향, 속도, 선회해야할 각도, 그리고 조종실 계기가 있다. 아래에 표시된 early turn은 airways나 routes를 준수하는 한 가지 방법이다. course 변경 시 선회를 lead 하기 위해 조종실 계기(예를 들어 Distance Measuring Equipment)를 사용할 수 있다. 이는 navigational aids나 fixes 사이의 airway 중심선을 따라, 그리고 direct course를 따라 운영하는 것을 요구하는 14 CFR Section 91.181의 목적과 일치한다.
b. fix 상공에서, 혹은 fix 통과 후 선회를 수행할 경우 airway나 route의 경계선을 초과할 수 있다. 그림 5-3-1은 이러한 flight track의 예시를 보여준다.
c. 선회를 lead 하지 않을 경우 TAS(true air speed) 290 노트를 초과하는 항공기는 airway나 route의 경계선을 초과할 수 있다. 이는 course를 변경하는 양, 풍향 및 풍속, turn fix의 특성(DME, overhead navigation aid, intersection), 그리고 course 변경을 수행하는 조종사의 기술에 따라 달라진다. 예를 들어 17,000ft MSL에서 TAS 400 노트에 25도 bank로 운영되는 항공기가 40도 이상의 course 변경을 수행할 경우 airway나 route의 폭(중심선으로부터 양 방향으로 4nm)을 초과할 것이다. 그러나 18,000ft MSL 미만의 공역에서 TAS 290노트를 초과하는 것은 일반적이지 않다. 또한 TAS 290노트를 초과하는 항공기의 course 변경 상황에서 추가적인 IFR 분리를 제공하는 것은 공역 낭비를 초래하며 저속 항공기들에게 불이익을 부과한다. 따라서 FAA는 조종사로 하여금 course 변경 도중 airways나 routes를 최대한 준수하기 위해 선회를 lead 하도록, 그리고 필요하다 판단되는 기타 조치를 취하도록 요구한다.
a. COP는 MEA가 지정된 Federal airways, jet routes, area navigation routes, 혹은 그 외 direct routes에 대해 규정된다. COP는 두 개의 항법 시설이나waypoints 사이의 경로를 따라 위치하며 여기서 navigation guidance를 전환해야 한다. 이 지점에서 조종사는 항법 수신기의 주파수를 항공기 뒤에 있던 station으로부터 항공기 앞에 놓인 station으로 바꿔야 한다.
b. straight route segments의 경우 COP는 보통 항법 시설들의 중간에 위치한다. dogleg route segments의 경우에는 굽어지는 지점을 형성하는 radials나 courses의 교차지점에 COP가 위치한다. COP가 중간에 위치하지 않는 경우에는 항공 차트에 COP의 위치가 표시될 것이며 무선 시설까지의 거리도 제공된다.
c. COP는 navigation guidance의 상실을 방지하기 위해, 다른 시설로부터의 주파수 간섭을 방지기 위해, 그리고 공역 내에서 모든 항공기들이 동일한 시설을 사용하게 만들기 위해 설정된다. 조종사들은 최대한 COP를 준수해야 한다.
fix, NAVAID, 혹은 waypoint 상공에서 선회가 필요한 경우 MEA(minimum enroute altitude)가 충분한 장애물 회피를 제공하는지 확인하기 위해 해당 지점 근처에 대한 검사가 수행된다. 고도 증가로 인한 속도 증가 때문에 MEA가 충분한 장애물 회피를 제공하지 못할 수도 있기 때문이다. 지형/장애물로 인해 일부 지역에서는(보통 산악 지형) 선회 기동 시 더 높은 minimum altitude를 필요로 할 수 있다. 더 높은 MTA(minimum turning altitude)를 필요로 하는 turning fix들은 minimum crossing altitude(MCA) 아이콘(“x” flag), 그리고 MTA restriction을 설명하는 사항들과 함께 정부 차트에 표시된다. MTA restriction은 일반적으로 다음으로 구성된다: 선회 지점으로 이어지는 ATS(air traffic service) route, 선회 지점으로부터 이어지는 ATS route, 그리고 요구되는 고도(예를 들어, MTA V330 E TO V520 W 16000). 의도하는 비행경로에 MTA가 적용되는 경우 조종사는 선회 지점 이전에 MTA 이상을 확보해야 한다. 그리고 선회 지점 이후의 ATS route 중심선에 도달하기 전까지는 MTA 이상을 유지해야 한다. 중심선에 설정된 이후에는 MEA/MOCA가 minimum altitude를 결정한다. 또한 MTA는 선회 도중 특정 고도, 혹은 특정 고도 범위를 제한할 수 있다. 예를 들어 MTA는 10,000 ~ 11,000ft MSL의 사용을 제한할 수 있다. 이 경우 11,000ft MSL보다 높은 고도는 제한되지 않는다. 또한 MEA/MOCA 조건이 충족된다면 10,000ft MSL보다 낮은 고도도 제한되지 않는다.
a. 항공기가 목적지 공항 이외의 fix로 인가되었으며 지연이 예상될 경우 완전한 체공 지시(단, 패턴이 차트에 표시된 경우 제외), EFC 시간, 그리고 추가적인 route/terminal 지연에 대한 예상을 발부하는 것은 ATC의 의무이다.
NOTE–
미국 정부의 low/high altitude en route chart, area chart, 혹은 STAR chart에 표시된 holding patterns만을 사용해야 한다. FAA의 조건을 충족하는 상업용 차트도 이용 가능하다.
b. 만약 holding pattern이 차트에 표시되어 있으며 관제사가 완전한 체공 지시를 발부하지 않았다면 조종사는 차트에 표시된 대로 체공해야한다. 할당된 절차, 혹은 비행하는 경로에 holding pattern이 존재하는 경우 ATC는 모든 체공 지시를 생략할 수 있다(단, 차트에 표시된 체공 방향, 그리고 AS PUBLISHED라는 구절은 제외. 예를 들어, HOLD EAST AS PUBLISHED). 조종사가 완전한 체공 지시를 요청할 경우 ATC는 항상 이를 발부해야 한다.
c. holding pattern이 차트에 표시되어 있지 않으며 체공 지시를 발부받지 않았다면 조종사는 fix에 도달하기 전에 ATC에게 체공 지시를 요청해야 한다. 이러한 절차는 ATC가 원했던 방법 이외의 holding pattern으로 항공기가 진입할 가능성을 제거한다. fix에 도달하기 전에 체공 지시를 얻을 수 없다면(주파수 혼잡, stuck microphone 등등으로 인해) 항공기가 fix에 접근한 course 상에서 standard pattern을 진입한다. 그리고 가능한 한 빨리 further clearance를 요청한다. 이 경우 clearance limit에 있는 항공기의 altitude/flight level은 보호된다. 이를 통해 필요에 따라 분리가 제공된다.
d. 항공기가 clearance limit으로부터 3분 이내이며 fix 이후의 clearance를 아직 받지 못하였다면 항공기가 maximum holding airspeed 이하로 fix를 통과하도록 감속을 시작해야 한다.
e. 지연이 예상되지 않을 경우 관제사는 최대한 빨리(가급적 항공기가 clearance limit에 도달하기 최소 5분 전에) fix 이후의 clearance를 발부해야 한다.
f. 조종사는 clearance limit에 도달한 시간과 altitude/flight level을 ATC에 보고해야 한다. 그리고 clearance limit을 떠날 때도 보고해야 한다.
NOTE–
양방향 교신 두절 상태인 경우 조종사는 14 CFR Section 91.185를 따라야 한다.
g. VOR station에서 체공하는 경우 조종사는 to/from indicator가 완전히 역방향이 되었을 때 outbound leg로 선회를 시작해야 한다.
h. 가장 일반적으로 사용되는 holding fixes에서의 holding patterns는 미국 정부의 low/high altitude en route chart, area chart, 혹은 STAR chart에 표시되어 있다. FAA의 조건을 충족하는 상업용 차트에도 표시되어 있다. 조종사는 차트에 표시된 대로 holding pattern에서 체공을 수행해야 한다(단, ATC가 특별히 언급한 경우 제외).
NOTE–
표준 maximum holding airspeed 이외의 속도로 보호되는 holding patterns는 아이콘으로 표시될 수 있다(단, 달리 표시되는 경우 제외). 이 아이콘은 standard holding pattern symbol(racetrack), 그리고 이 중앙에 표시되는 제한 속도로 구성된다. 속도 제한이 standard holding pattern symbol의 옆에 표시되는 경우도 있다.
REFERENCE–
AIM, Paragraph 5-3-8j2, Holding
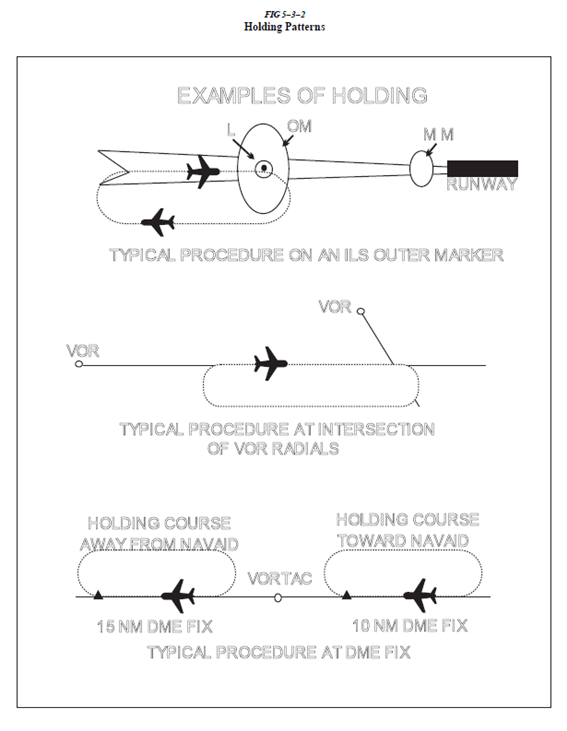
i. 패턴이 표시되어있지 않은 fix에서 항공기 체공을 요구하는 경우 ATC clearance는 다음 정보들을 포함한다: (그림 5-3-2 참조.)
1. fix로부터의 체공 방향. 이는 8방위로 제공된다(예를 들어 N, NE, E, SE, 등등).
2. Holding fix(송신 시작 시 holding fix가 clearance limit으로써 언급된 경우 이는 생략될 수 있음).
3. 항공기가 체공하여야할 radial, course, bearing, airway 혹은 route.
4. DME나 RNAV가 사용되어야 하는 경우에는 마일 단위의 leg 길이(조종사가 요청한 경우, 혹은 관제사가 필요하다 판단한 경우 leg 길이가 시간 단위로 명시될 것이다).
5. 좌선회가 수행되는 경우, 조종사가 요청한 경우, 혹은 관제사가 필요하다 판단한 경우 선회 방향.
6. EFC 시간, 그리고 추가적인 지연 정보.
j. holding pattern airspace protection은 다음 절차에 기초한다.
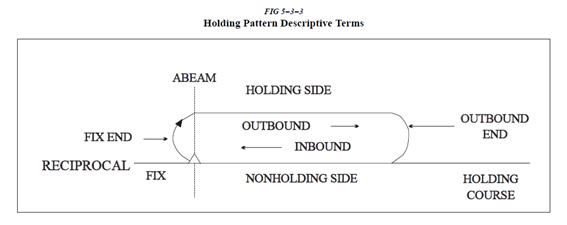
1. Descriptive Terms.
(a) Standard Pattern. Right turns(그림 5-3-3 참조.)
(b) Nonstandard Pattern. Left turns
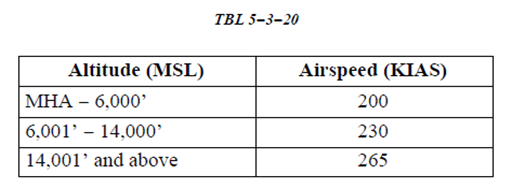
2. Airspeeds
(a) 모든 항공기는 다음 고도 및 maximum holding airspeeds로 체공할 수 있다:
NOTE–
이는 모든 체공에 적용될 수 있는 최대 지시 속도이다.
(b) 다음은 maximum holding airspeeds에 대한 예외이다:
(1) 6,001‘ ~ 14,000’까지의 holding patterns는 최대 속도 210KIAS로 제한될 수 있다. 이러한 nonstandard pattern은 아이콘으로 설명될 것이다.
(2) holding patterns는 maximum speed로 제한될 수 있다. 속도 제한은 차트의 holding pattern 내에 괄호로 표시된다: 예, (175). 항공기가 protected airspace를 벗어나는 것을 방지하기 위해선 holding fix를 통과하기 전에 maximum speed 이하여야 한다. maximum airspeed 제한을 따를 수 없는 조종사는 ATC에 알려야 한다.
(3) USAF 비행장에서의 holding patterns – 최대 310KIAS(단, 달리 표시된 경우 제외).
(4) Navy fields에서의 holding patterns - 최대 230KIAS(단, 달리 표시된 경우 제외).
(5) “COPTER” 계기 절차에 따라 체공하는 모든 helicopter/power lift aircraft - 최소 90KIAS(단, 달리 표시된 경우 제외).
(6) 절차에 climb-in hold가 명시된 경우(예를 들어, “Climb-in holding pattern to depart XYZ VORTAC at or above 10,000.” 혹은 “All aircraft climb-in TRUCK holding pattern to cross TRUCK Int at or above 11,500 before proceeding on course.”) 상승 도중 높은 속도를 필요로 하는 항공기를 수용하기 위해 추가적인 장애물 보호 구역이 제공된다.climb-in-holding 도중 maximum airspeed는 310KIAS이다(단, 달리 표시된 경우 제외). 14 CFR Section 91.117, Aircraft Speed에서의 속도 제한은 여전히 적용된다.
(c) holding pattern airspace area에 대한 maximum holding airspeed를 조종사에게 알리기 위해 ATCS는 다음 용어를 사용할 수 있다.
PHRASEOLOGY-
(AIRCRAFT IDENTIFICATION) (holding instructions, when needed) MAXIMUM HOLDING AIRSPEED IS (speed in knots).
3. Entry Procedures. holding protected airspace는 아래에 설명된 세 가지 holding pattern entry procedures를 기초로 설계되었다. 이러한 권장 절차를 준수하지 않음과 동시에 holding fix를 과도한 속도로 통과할 경우 항공기가 holding protected airspace를 초과할 수 있다. (그림 5-3-4 참조.)
(a) Parallel Procedure. sector (a)의 어느 지점으로부터 holding fix로 접근할 경우 nonholding side 쪽에서 1분간 holding course outbound와 평행한 heading으로 선회한다. 그 다음에는 holding pattern 방향으로 180도 이상 선회한다. 마지막으론 holding fix로 되돌아오거나, 혹은 holding course inbound를 intercept하는 것이다.
(b) Teardrop Procedure. sector (b)의 어느 지점으로부터 holding fix로 접근할 경우 fix를 통과한 다음 1분간 pattern 내에서(holding side 쪽에서) 30도의 teardrop entry를 위한 outbound heading으로 선회한다. 그 다음 inbound holding course intercept를 위해 holding pattern쪽으로 선회한다.
(c) Direct Entry Procedure. sector (c)의 어느 지점으로부터 holding fix로 접근할 경우 fix를 통과한 다음 holding pattern을 따라 선회한다.
(d) 이 외의 entry procedures를 통해서도 항공기가 holding pattern에 진입할 수 있으며 protected airspace 내를 유지할 수 있다. 허나 parallel, teardrop, 그리고 direct entry는 FAA가 권장하는 절차이며 이들은 체공을 위한 장애물 보호 구역의 크기 및 형태 개발의 일부로 파생되었다.
(e) Nonstandard Holding Pattern. fix end turn과 outbound end turn이 좌측으로 이루어진다. nonstandard pattern entry procedure는 standard pattern과 마찬가지로 holding side의 70도 선을 기준으로 한다.
4. Timing
(a) Inbound Leg.
(1) 14,000ft MSL 이하: 1분
(2) 14,000ft MSL 초과: 1분 30초.
NOTE–
첫 번째 outbound leg는 고도에 따라 1분, 혹은 1분 30초 비행되어야 한다. 그 이후에는 적절한 inbound leg 시간을 달성하기 위해 outbound legs 시간이 조절되어야 한다. 적절한 inbound leg 시간을 달성하기 위해 조종사는 모든 항법 수단을 사용할 수 있다(예를 들어 DME, RNAV, 등등).
(b) Outbound leg timing은 fix를 over/abeam한 것 중 나중에 발생한 시점에 시작된다. abeam 위치를 결정할 수 없다면 outbound를 향한 선회가 완료되었을 때 timing을 시작한다.
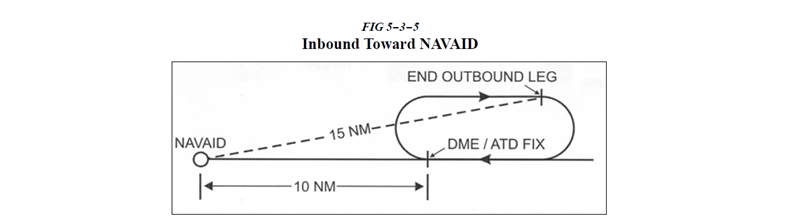
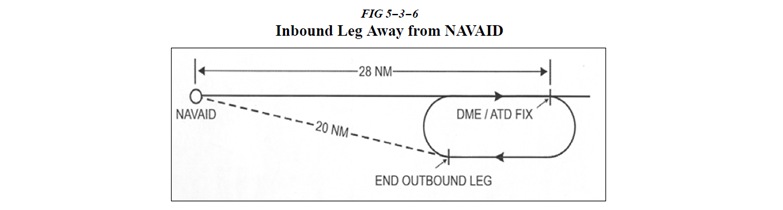
5. Distance Measuring Equipment(DME)/ GPS Along-Track Distance(ATD). DME/GPS holding에서도 동일한 체공 절차가 적용된다. 단, 시간 대신에 거리(NM)가 사용된다. DME/GPS holding pattern의 outbound course를 pattern의 outbound leg라 부른다. 관제사, 혹은 계기 접근 절차 차트는 outbound leg의 길이를 명시할 것이다. outbound leg의 끝부분은 DME나 ATD 값으로 결정된다. holding pattern은 특정 course나 radial을 기준으로 하며 inbound end와 outbound end는 DME station으로부터 측정된다. GPS overlay procedure나 GPS stand alone procedure를 비행할 경우 holding fix는 데이터베이스 내의 waypoint이 outbound leg의 끝 지점은 ATD를 통 결정된다. 몇몇 GPS overlay procedure와 초기 stand alone procedure에는 timing이 명시되어있을 수 있다. (그림 5-3-5, 그림 5-3-6, 그림 5-3-7 참조.) IFR operation을 위해 GPS를 사용할 경우 필요조건 및 제한을 위해 Paragraph 1-1-17, Global Position-ing System(GPS)을 참조한다.
NOTE–
inbound course가 NAVAID로 향해있고 fix 거리가 10NM이며 구간 길이가 5NM이라면 outbound leg의 끝 부분은 DME 값이 15NM일 때 도달한다.
NOTE–
inbound course가 NAVAID의 바깥쪽으로 향해있고 fix 거리가 28NM이며 구간 길이가 8NM이라면 outbound leg의 끝 부분은 DME 값이 20NM일 때 도달한다.
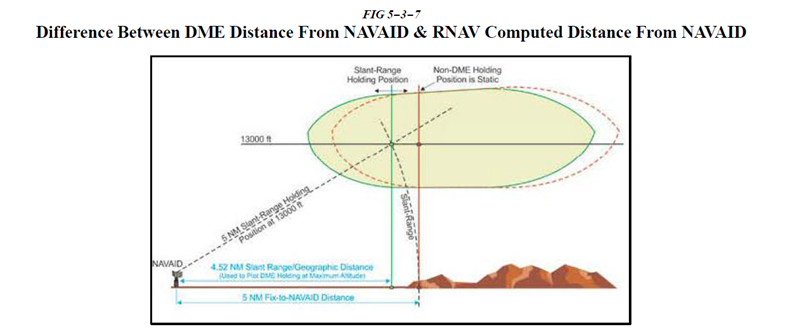
6. Use of RNAV Distance in lieu of DME Distance. 체공 시 DME거리 대신 RNAV가 계산한 NAVAID 거리를 사용할 수 있다. 그러나 실제 체공 위치, 그리고 비행될 패턴은 실제 설계된 것보다 NAVAID로부터 더 멀리 떨어져 있다. 왜냐하면 위치 결정에 있어서 경사 거리가 없기 때문이다(그림 5-3-7 참조). 이로 인해 NAVAID를 기준으로 하는 RNAV 거리 값과 DME 값 사이에 약간의 차이가 발생할 수 있다(특히 높은 고도에서). 오직 DME를 대체하는 경우에는 RNAV 거리와 DME 경사 거리 사이의 차이를 무시할 수 있으며 조종사 조치를 필요로 하지 않는다.
REFERENCE–
AIM Paragraph 1-2-3, Use of Suitable Area Navigation (RNAV) Systems on Conventional Procedures and Routes
7. Use of RNAV Guidance and Holding. 체공 수행 시 lateral guidance를 위해 RNAV 시스템(FMS와 stand-alone GPS receivers 포함)을 사용할 수 있다. RNAV 시스템이 체공을 수행하는 방법은 항공기, 그리고 RNAV 시스템 제조업체에 따라 다르다. 차트에 게재된 체공을 위해 RNAV 데이터베이스에서 holding pattern 정보를 추출하거나, 혹은 ATC가 할당한 체공을 위해 직접 입력을 수행할 수도 있다. 조종사는 체공에 사용될 특정 RNAV 시스템의 능력과 한계를 잘 알고 있어야 한다.
(a) 모든 체공(RNAV, 혹은 RNP procedure에서 규정된 체공 포함)은 conventional NAVAID holding 설계 기준(holding protected airspace 기준 포함)을 기초로 한다. conventional holding pattern 설계에서 가정된 holding entry/flight track은 RNAV guidance를 사용한 holding entry/flight track과 다르다. 하나하나의 차이는 holding pattern protected airspace 내를 머무르는 능력에 영향을 미치지 않을 수 있다. 그러나 이러한 차이가 누적될 경우 holding pattern protected airspace의 한계까지 벗어날 수도 있으며 경우에 따라 protected airspace를 벗어날 수도 있다. holding pattern을 비행하기 위해 RNAV 시스템이 lateral guidance를 제공할 경우 다음과 같은 차이점과 고려 사항이 적용된다:
(1) 많은 시스템들이 entry method를 선택하는데 있어 heading 대신 ground track angle을 사용한다. holding pattern 설계가 5도의 오차를 허용하긴 하지만 바람이 큰 편류각을 발생시키는 경우에는 예상치 못한 entry로 이어질 수 있다.
(2) holding protected airspace는 항공기가 초기 entry 도중 holding fix를 fly-over할 것을 기초로 한다. RNAV 시스템의 경우 holding fix 접근 시 entry 이전에 “fly-by” 선회를 수행할 수도 있다. holding course의 holding pattern side로부터 direct entry 도중 “fly-by” 선회를 수행할 경우 protected airspace를 넘어서는 결과로 이어질 수 있다(특히 intercept angle과 ground speed가 높은 경우).
(3) 체공 도중 RNAV 시스템은 inbound 선회와 outbound 선회를 위해 일정한 bank, 혹은 일정한 radius를 통해 lateral steering guidance를 제공한다. 항공기의 flight guidance system은 모든 선회(체공 도중의 선회 포함) 도중 얕은 bank angles를 사용할 수 있다(특히 높은 고도에서). 이는 holding protected airspace를 초과하는 결과를 초래할 수도 있다. 얕은 bank angle은 항공기 track의 폭과 길이를 둘 다 증가시킨다(특히 풍속이 증가할수록). 만약 flight guidance system의 bank angle limit을 조종사가 선택할 수 있다면 고도에 상관없이 최소 25도의 bank angle을 선택해야 한다(단, 항공기 운영 한계에 달리 명시되어있으며 조종사가 ATC에 알린 경우 제외).
(4) 체공 거리가 게재된 경우 outbound leg로부터의 선회는 차트에 게재된 거리에서 시작되어야 한다. 따라서 protected airspace 내를 유지하기 위해선 design turn point가 설정되어야 한다. RNAV 시스템은 데이터베이스에 코드화된 구간 길이를, 혹은 조종사가 입력한 구간 거리를 holding fix로 향하는 최대 inbound leg 길이로 적용한다. RNAV 시스템은 이러한 inbound leg 길이를 달성하는데 필요한 outbound leg상의 선회 지점을 계산한다. 이는 종종 outbound leg상의 RNAV-calculated turn point가 design turn point를 초과하게 만든다. (그림 5-3-8 참조). outbound leg에 강한 정풍이 있을 경우 RNAV 시스템은 protected airspace 너머까지 비행할 수도 있다. (그림 5-3-9 참조). 이는 특히 높은 고도에서 더욱 사실이다. 높은 풍속으로 인해 ground speed는 더 넓은 holding pattern을 생성한다.
(5) 일부 RNAV 시스템은 체공 진입 전 항공기의 고도 및 속도를 기초로 holding pattern을 계산한다. 이 시점 이전에 maximum holding speed로 속도를 감소하지 않을 경우 시스템이 계산한 패턴이 protected airspace를 초과할 수도 있다. holding pattern을 loading, 혹은 executing 할 경우 항공기의 현재 고도에 적절한 속도 제한과 시간 제한이 RNAV lateral guidance를 위한 holding pattern을 규정하는데 사용될 수 있다. 이로 인해 RNAV 시스템이 잘못된 체공을 비행할 수 있다. 예를 들어 14,000ft 미만에서 체공하려고 의도하였으나 14,000ft를 초과하는 holding pattern을 entering, 혹은 executing 할 경우 1분 30초의 timing이 적용될 수 있다.
NOTE–
일부 시스템은 항법 데이터베이스에 규정된 holding pattern의 leg time을 수정할 수 있다(예를 들어 hold-in-lieu of procedure turn). 대부분의 RNAV 시스템에서 holding pattern time은 조종사가 수정한 시간으로 유지된다. 더 짧은 시간 간격이 적용되는 고도로 하강한다 하여도 데이터베이스에 규정된 시간으로 되돌아가지 않는다.
(b) RNAV 시스템은 holding pattern protected airspace를 벗어나는 것에 대해 조종사에게 알릴 수 없다. 왜냐하면 이러한 영역의 범위는 항법 데이터베이스에 포함되지 않기 때문이다. 또한 holding pattern protected airspace의 크기는 차트에 표시된 holding pattern 고도에 따라 달라진다. 이 장에 설명된 pilot action을 잘 따를 경우 RNAV lateral guidance를 사용하여 체공을 수행할 때 holding pattern protected airspace의 한계를 넘어설 가능성을 감소시킨다.
(c) holding patterns는 RNAV 시스템의 항법 데이터베이스에 저장될 수 있다. 이는 RNAV 시스템이 체공을 수행하는 방법을 규정하는 매개변수와 함께 코딩될 수 있다. 예를 들어 코딩을 통해 체공이 HM(수동 종료되기 전까지 계속 체공), HA(특정 고도에 도달하기 전까지 계속 체공), 혹은 HF(entry 이후 처음으로 holding fix를 통과하기 전까지 계속 체공)를 결정한다. 일부 시스템에서는 모든 holding pattern을 저장하지는 않는 대신 missed approaches, 그리고 hold-in-lieu of procedure turn(HILPT)과 관련된 패턴만을 저장할 수 있다. 일부 시스템은 모든 체공을 standard patterns로 저장한다. 이 경우 non-standard holding(좌선회)을 수행하기 위해선 pilot action이 필요하다.
(1) 다수의 holding patterns가 하나의 fix에 설정될 수 있으므로 주의해야 한다. 이러한 holding patterns는 용도(en route holding pattern, SID나 STAR에 표시된 holding pattern, 또는 계기 접근 절차에서 사용되는 holding pattern)에 따라 선회 방향과 구간 길이가 달라질 수 있다. 많은 RNAV 시스템의 경우 특정 fix에서의 데이터베이스 코딩을 하나의 holding pattern으로 제한한다. 항법 데이터베이스로부터 holding pattern을 사용하는 조종사는 holding pattern의 선회 방향, 속도 제한, timing, 그리고 길이에 대해 차트에 표시된 holding pattern과 일치하는지 확인해야 한다.
(2) 차트에 표시되지 않은 체공을 ATC가 할당한 경우 조종사는 할당받은 holding course, 선회 방향, 속도 제한, 구간 길이(혹은 시간)로 RNAV 시스템을 프로그래밍 할 책임을 가진다.
(3) 항공기가 holding fix에 가까이 근접하였다면 두 번째 바퀴(holding pattern) 전까지는 첫 번째 바퀴 이후 변경된 사항이 적용되지 않을 수 있다.
8. Pilot Action. conventional NAVAID guidance나 RNAV lateral guidance를 사용하여 체공을 수행할 때 다음을 수행할 경우 항공기가 holding protected airspace 이내에 있도록 만든다.
(a) 속도. ATC가 체공에 대한 사전 공지를 한 경우 holding fix를 통과하기 최소 3분 전에 maximum holding speed 이하로 감속한다. 만약 ATC가 사전 공지를 하지 않았다면 최대한 빨리 감속을 시작한다. RNAV 시스템을 통해 감속 지점을 결정할 수 있으며 RNAV가 계산한 체공 속도로 감속을 관리할 수 있다. RNAV 시스템이 감속을 관리하도록 허용하지 않은 경우엔 entry 시의 실제 holding pattern 크기가 RNAV 시스템이 계산한 holding pattern 크기와 다를 수 있다.
(1) 항공기는 표 5-3-8 j 2(a)에 게재된, 혹은 차트에 표시된 maximum holding speed 이하로 체공에 진입해야 한다.
[a] 체공을 수행하는 모든 고정익 항공기는 편류의 영향을 최소화하기 위해 90 KIAS 이상으로 비행해야 한다.
[b] 고정익 항공기로 RNAV lateral guidance를 사용하는 경우 비행기의 recommended holding speed와 일치하는 최대한 낮은 속도로 체공하는 것이 바람직하다. 이는 RNAV holding과 연관된 누적 오차들을 줄이기 위해, 그리고 protected airspace 내에 남아있을 가능성을 높이기 위함이다. RNAV 시스템이 maximum holding speed 이하의 recommended holding speed를 결정하는 것이 허용된다.
(2) maximum holding airspeed를 따를 수 없는 경우엔 즉시 ATC에 알린다. 그리고 alternate clearance를 요청한다.
NOTE–
난기류, 착빙 등등으로 인해 maximum, 혹은 published holding speed를 초과해야할 수 있다. maximum holding airspeed를 초과할 경우 항공기가 holding pattern protected airspace를 넘어설 수 있다. non-radar environment의 경우 조종사는 체공을 수행할 수 없음을 ATC에 알려야 한다.
(3) RNAV 시스템이 holding pattern에 대해 올바른 시간 제한/속도 제한을 적용하는지 확인한다. 이는 현재의 항공기 고도와는 다른 시간 제한/속도 제한을 갖춘 holding pattern 고도로 상승/하강할 때 특히 중요하다.
(b) Bank angle. RNAV lateral guidance를 사용하지 않는 체공에서의 entry 및 holding 도중 모든 선회를 다음으로 수행한다:
(1) 초당 3도, 혹은
(2) 30도 bank angle, 혹은
(3) flight director 시스템이 사용되는 경우 25도 bank angle
NOTE–
이들 중 가장 적은 bank angle을 사용한다.
(4) 체공을 수행하기 위해 RNAV lateral guidance를 사용하는 경우 RNAV 시스템이 outbound turns와 inbound turns를 위한 bank angle을 계산하는 것이 허용된다. 25도 미만의 flight guidance system bank angle limiting 기능을 사용하지 않는다(단 이 기능을 조종사가 선택할 수 없는 경우, 항공기 제한에 의해 필요할 경우, 혹은 항공기의 minimum maneuvering speed를 준수하기 위해 필요한 경우 제외). 만약 bank angle이 반드시 25도 미만으로 제한되어야 한다면 체공을 위한 추가 영역이 필요함을 ATC에 알린다.
(c) inbound 구간과 outbound 구간에서의 바람 영향을 보상을 위해 주로 편류 수정을 적용한다. outbound시 inbound 편류 수정을 3배로 적용함으로써 과도한 선회 수정을 피한다(예를 들어 inbound시 왼쪽으로 8도를 수정하였다면 outbound시 오른쪽으로 24도를 수정).
(d) holding fix에 도달하였을 때의 항공기 heading을 통해 entry turn을 결정한다. +/- 5도의 heading은 entry를 결정하는데 있어 운영 범위 내에 있는 것으로 간주된다. 체공을 위해 RNAV lateral guidance를 사용하는 경우 시스템이 holding entry를 계산하는 것이 허용된다.
(e) RNAV lateral guidance는 holding fix로부터 꽤나 멀리 떨어진 지점으로부터 fly-by 선회를 수행할 수 있다. holding fix에 도달하기 최소 3분 전에 maximum holding speed로 감속하는 것, 그리고 recommended 25 degree bank angle을 사용하는 것은 protected airspace를 넘어설 가능성을 감소시킬 것이다.
(f) 체공을 위해 RNAV guidance가 사용될 때 만약 outbound leg로부터 inbound leg를 향한 선회가 차트에 표시된 구간 길이 내에서 시작되지 않는다면 조종사가 개입해야 한다(특히 체공이 course reversal HILPT로 사용되는 경우). ATC가 할당한 체공(차트에 표시되지 않은 체공)을 수행하는 경우에는 조종사의 개입이 필요하지 않다. 그러나 체공을 위해 RNAV guidance를 사용할 때 outbound leg 길이가 과도해졌다면 ATC에 알린다.
k. fix에서 체공중이며 fix를 떠나는 시간을 지정받았다면 조종사는 정확한 때에 fix를 떠나기 위해 holding pattern의 한계 내에서 비행경로를 조절해야한다. holding fix를 떠난 후에는 기타 속도 제한 조건(예를 들어 terminal area 속도 제한, 혹은 특정 ATC 요청 등등)과 관련된 속도를 재개해야 한다. fix가 계기 접근과 연관되어 있으며 timed approaches가 시행중인 경우 접근 승인을 받았을 때 procedure turn을 수행해서는 안 된다(단, 조종사가 ATC에 알린 경우 제외). 왜냐하면 체공 항공기가 holding pattern에서 곧장 final approach inbound를 향해 진행할 것으로 예상되기 때문이다.
l. holding pattern airspace에서의 레이더 감시.
1. 항공기 체공 시 ATC는 레이더 화면에 나타난 holding airspace에 대해 레이더 감시를 제공한다.
2. 관제사는 holding airspace를 벗어나려는 모든 체공 항공기를 탐지하려 시도한다. 그리고 이러한 항공기가 holding airspace로 돌아올 수 있도록 돕는다.
NOTE–
이러한 추가적 서비스를 ATC가 제공하지 못하게 만드는 많은 요소들이 있다(예를 들어 업무량, targets의 수, precipitation, 지상 교란, 그리고 레이더 시스템 성능). 이 경우 holding pattern을 벗어나는 항공기의 레이더 식별을 유지하는 것이 불가능할 수 있다. 이 서비스는 관제사의 재량에 따라 제공되므로 이는 조종사가 ATC clearance를 준수할 책임을 완화하지 않는다.
3. 차트에 게재된 holding pattern과 연관되지 않은 체공을 ATC가 할당한 경우 항적과 장애물 회피에 대한 책임은 ATC에게 있다. 할당된 고도는 minimum vectoring altitude, 혹은 minimum IFR altitude 이상일 것이다.
4. minimum holding altitude 이상의 고도에서 holding pattern을 비행하던 도중 접근 승인을 받았다면 조종사는 minimum holding altitude로 하강할 수 있다. holding pattern이 계기 차트에 게재되어 있으며 이것이 in lieu of procedure turn으로 사용되는 경우 이는 IAP의 segment가 된다.
m. minimum holding altitudes가 게재되지 않은 holding patterns에서 조종사가 approach clearance를 받았다면 holding pattern을 떠나고 inbound course에 establish 되기 전까지는 마지막으로 할당받은 고도를 유지해야한다. 그 이후에는 비행 중인 route segment에 대해 차트에 게재된 최소 고도가 적용된다. inbound course에서 정상 하강이 수행될 수 있는 holding altitude가 조종사에게 할당될 것이다.