Instrument Approach Procedure(IAP) Briefing
철저한 접근 브리핑은 계기 접근의 성공 가능성을 증가시킨다. 대부분의 Part 121, 125, 그리고 135 operators는 IAP briefing에 포함되어야 하는 특정 항목들을, 그리고 그 항목들의 브리핑 순서를 지정한다.
IAP briefing이 시작되기 전에 조종사는 이용 가능한 정보를 통해 어떤 절차가 비행될 가능성이 가장 높은지를 결정해야 한다. ATIS 정보를 갖춘 공항으로 향하는 경우에는 ATIS가 현재 사용 중인 접근을 조종사에게 제공한다. 두 개 이상의 접근이 사용 중인 경우 조종사는 기상, 입항 방향, 게재된 NOTAMs, 그리고 접근 관제시설과의 이전 교신을 기초로 어떤 접근이 발부될지를 추측해야 할 수 있다. 조종사는 어떤 접근이 예상되는지를 ATC에 물어볼 수 있다. 조종사는 언제든 장비의 개별 조건이나 규제 사항을 충족하기 위하여 특정 접근을 요청할 수 있다. 그리고 ATC는 업무량과 항적량이 괜찮다면 이러한 요청을 수용할 수 있을 것이다.
관제탑이 없는 공항으로 비행하는 경우 조종사는 가끔 해당 공항에서 이용가능한 계기 접근들 중 선택권을 가진다. 이 경우 조종사는 기상, 항공기 성능, 입항 방향, 공항 NOTAMs, 그리고 해당 공항에서의 이전 경험을 바탕으로 적절한 접근을 선택하여야 한다.
Navigation and Communication Radios
예상되는 접근 및 활주로가 선택되었다면 각 조종사의 본인의 flight deck을 설정해야 한다. 조종사는 ATIS, 운항관리사(가능한 경우), ATC, 특정 접근 차트, 그리고 기타 이용 가능한 모든 정보원들로부터 모인 정보를 사용한다. 회사의 규정에 따라 특정 사항들이 설정되며 나머지 사항들은 조종사에게 맡겨진다. 일반적으로 대부분의 회사들이 사용하는 기법들은 비슷하다. 이 장에서는 two-pilot operations를 다룬다. single-pilot IFR 비행 도중에도 동일한 항목들이 설정되어야 하며 모든 것들이 정확히 설정되었는지를 확인하기 위해 approach briefing을 수행해야 한다.
미리 설정할 수 있는 항목의 개수는 automation의 수준, 그리고 이용 가능한 항전장치에 따라 달라진다. conventional flight deck의 경우 보통 airspeed bugs(성능 계산에 기초하여 설정), altimeter bug(DA, DH, 혹은 MDA), go around thrust/power setting, radio altimeter bug(항공기에 설치되어 있으며 접근을 위해 필요한 경우), 그리고 navigation/communication radios(standby frequency selector를 사용할 수 있는 경우)만이 설정될 수 있다. PF navigation radio의 standby에는 접근을 위한 primary NAVAID로 설정되어야 한다. 그리고 PM navigation radio standby selector의 경우에는 조종사의 전반적인 상황 인식을 높이기 위하여 primary NAVAID 이외의 NAVAIDs를, 그리고 회사 절차에서 명시하는 NAVAIDs를 설정해야 한다. ADF 또한 접근에서 요구하는 적절한 주파수로, 혹은 조종사가 선택한 적절한 주파수로 조정되어야 한다. 조종사는 설령 vacuum failure나 electrical failure가 발생하여도 최선의 결과로 이어질 수 있도록 계기들을 설정해야 한다. 예를 들어 만약 항공기의 배터리나 비상 전력이 Nav 1만을 작동시킨다면 Nav 1이 final approach를 위한 primary NAVAID로 설정되어야 한다.
Flight Management System(FMS)
glass flight deck과 RNAV(GPS) system을 갖춘 항공기는 conventional flight deck aircraft에서 이용 가능한 항목들 외에도 접근에 대한 final approach course를 설정하는 기능을, 그리고 상황 인식을 높이기 위한 기타 여러 옵션들을 제공한다. FMS를 갖춘 항공기의 조종사들은 접근 유형 및 회사 절차에 따라 FMC(flight management computer)를 설정함으로서 다양한 옵션들을 사용할 수 있다. 보통 PF가 접근에 대하여 FMC를 프로그래밍 하고 PM이 정보를 검증한다. 비행 초반에 프로그래밍 해둔 목적지 공항을 기반으로, 혹은 en route 도중 선택한 새로운 목적지를 기반으로 이용 가능 접근을 선택할 수 있다.
접근에 대해 제공되는 정보의 양은 항공기마다 다르다. 허나 컴퓨터에 프로그래밍 되지 않은 사항이 존재하는 경우 조종사는 이를 수정할 수 있다(예를 들어 MAP를 추가하거나, 혹은 상황 인식 목적만을 위해 전체 접근을 구축할 수 있음). 또한 PF는 하강을 위한 VNAV profile을, 그리고 비행 전에 프로그래밍 되지 않은 LNAV 구간들을(예를 들어 STAR, 혹은 계획하는 접근에 대한 예상 경로) 프로그래밍 할 수 있다. STAR에 대한 모든 crossing restrictions 또한 프로그래밍 되어야 할 수 있다. 가장 일반적인 crossing restrictions(mandatory나 “to be expected”)는 보통 STAR가 선택되었을 때 자동으로 프로그래밍 된다. 허나 이는 ATC로부터 언제든지 변경될 수 있다. 설정되어야할 이 외의 항목들은 특정 항공기 절차마다 달라진다(예를 들어 autopilot, auto-throttles, auto-brakes, pressurization system, fuel system, seat belt signs, anti-icing/deicing equipment, 그리고 igniters).
Autopilot Modes
보통 FMC가 작동하지 않아도 접근을 위해 autopilot을 사용할 수 있다(FMC가 작동하지 않는 상태에서 autopilot 작동이 허가되는지를 확인하기 위해 특정 항공기의 MEL(minimum equipment list)을 참조하라). approach briefing 도중 FMC의 유무와 관계없이 autopilot의 사용에 관하여 논의되어야 한다(특히 altitude pre-selector와 auto-throttles의 사용에 관하여). 특정 항공기의 AFM은 계기 접근 도중 autopilot을 사용하는데 필요한 절차 및 한계를 나타낸다.
항공기를 상승/하강시킬 수 있는 autopilot modes는 매우 다양하다. 몇몇 예시로는 level change(LVL CHG), vertical spped(V/S), VNAV, 그리고 takeoff/go around(TO/GA)가 있다. 조종사는 pitch modes 및/혹은 roll modes를, 그리고 이와 연관된 auto-throttle modes를 선택하여 항공기를 autopilot으로 조종한다. 보통 두 조종사 모두 이러한 패널(종종 mode control panel이라 불림)을 이용할 수 있다. 정교한 auto-flight systems와 auto-throttles를 갖춘 항공기는 대부분 최대 상승 추력으로 상승하는, 그리고 idle throttles로 하강하는 모드를 선택할 수 있다(LVL CHG, FL CHG(flight level change), 그리고 manage level). 또한 해당 장치들은 pre-selected altitudes에서 level off를 수행할 수 있으며 LOC, G/S, 혹은 VOR course를 track할 수 있다. 만약 항공기가 RNAV를 갖추고 있다면 autopilot은 RNAV-generated course도 track할 수 있다. 이러한 모드의 대부분은 autopilot으로 계기 접근을 수행하는 도중 특정 시점에서 사용된다. 또한 이러한 모드들은 항공기를 수동으로 비행하는 조종사에게 FD(flight director) guidance를 제공하기 위해서도 사용될 수 있다.
다음은 정밀 접근의 예시이다. 해당 예시에서는 autopilot 활성화 시 auto-throttles가 활성화되며 구체적인 속도 및 외장 변경은 설명되지 않는다. [그림 4-20] PF는 mode control panel의 speed selector를 통해 속도를 제어한다. 그리고 필요한 경우 PM에게 flaps와 landing gear를 요청한다. 비행기는 KNUCK로부터 북서쪽 5NM 및 4,500ft에 위치하며 Rwy 12 LOC inbound를 track 하도록 승인되었다. 현재의 roll modes는 LOC이며 PF의 NAV radio는 LOC 주파수인 109.3으로 동조되어 있다. 그리고 현재의 pitch mode는 altitude hold(ALT HOLD)이다. 접근 관제소가 항공기의 접근을 승인하였다. PF는 false glideslope의 capture를 방지하기 위해 autopilot mode를 바로 변경하지 않았다. 허나 PM은 altitude selector를 1,700ft로 변경한다. pitch mode가 ALT HOLD로 남아있기 때문에 다른 pitch mode가 선택되기 전까지는 항공기가 수평을 유지한다. KNUCK에 도달한 후 PF는 pitch mode로 LVL CHG를 선택하였다. 항공기가 하강을 시작하면 auto-throttles가 idle로 감소된다. 1,700ft 접근 시 pitch mode가 자동으로 altitude acquire(ALT ACQ)로 변화하며 이후 항공기가 1,700ft에서 수평을 잡으면 ALT HOLD로 변화한다. PF는 항공기를 감속하고, 외장 변경을 요청하며, approach mode를 선택한다. roll mode는 계속하여 LOC를 track하고 pitch mode는 ALT HOLD로 유지되며 G/S mode가 arm 된다. false glideslope을 track하는 것을 방지하기 위해 항공기가 FAF altitude에서 수평이 된 다음 APP를 선택하는 것이 권장된다.
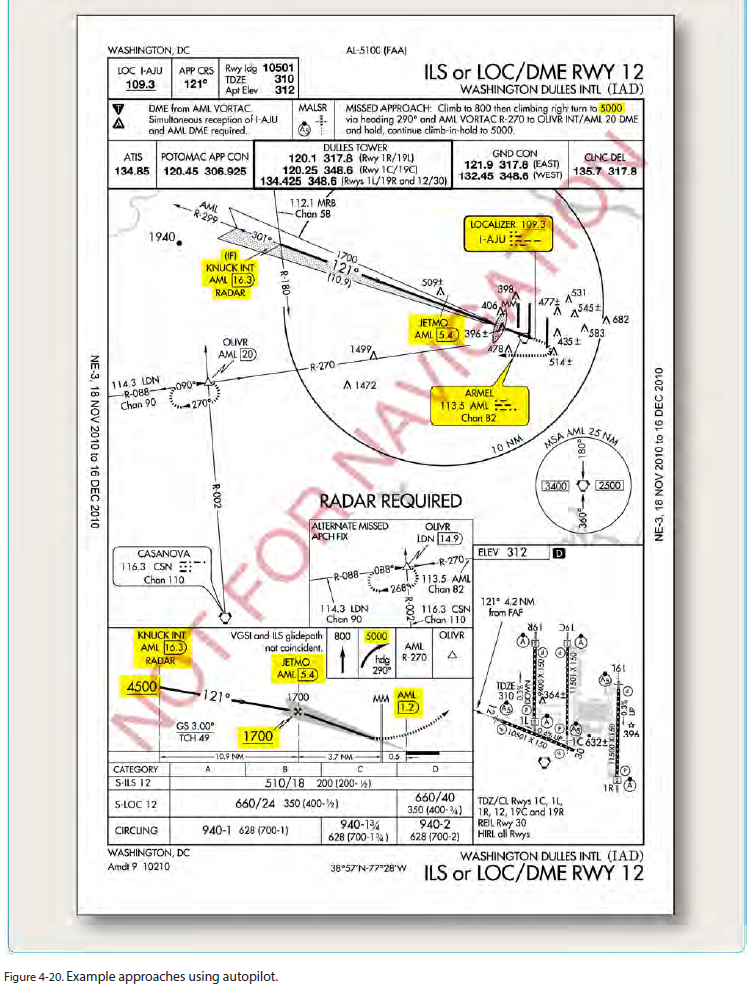
stabilized approach를 수행하기 위해 PF는 glideslope 교차 이전에 항공기를 완전한 착륙 외장 상태로 준비해한다. 항공기가 glideslope를 교차하면 pitch mode가 G/S로 변화한다. autopilot이 glideslope를 capture한 후 PM은 PF의 요청에 따라 altitude pre-selector에 missed approach altitude를 선택할 수 있다. 항공기는 계속하여 glideslope을 track한다. PF가 autopilot을 해제하도록 승인되는 최소 고도는 항공기마다 다르다. CAT I approach 도중 PF는 이러한 고도에 도달하기 전에 autopilot을 해제할 수 있다. initial missed approach는 보통 FD guidance와 함께 수동으로 비행된다(단, CAT II approach나 CAT III approach 도중 auto-land가 활성화된 경우 제외).
해당 예시의 비정밀 접근을 비행하는 경우 항공기가 1,700ft에서 수평을 잡은 이후부터 차이가 발생한다. ALT HOLD가 지시되면 PM은 PF의 요청에 따라 MDA를 설정한다. MDA에 대해 정확한 고도를 설정하는 것은 매우 중요하다. 그래야만 항공기가 의도치 않게 MDA 아래로 하강하지 않는다. altitude pre-selector가 100ft 단위로만 설정될 수 있는 항공기의 경우 해당 접근의 MDA를 660ft 대신 700ft로 설정해야 한다.
정교한 하강 제어를 위해 FAF부터 vertical speed mode를 사용한다. 만약 조종사가 altitude pre-selector window에 MDA를 설정하지 않았다면 PF는 V/S를 입력할 수 없으며 항공기는 수평을 유지한다. 항공기가 700ft에서 수평을 잡으면 autopilot mode가 ALT ACQ에서 ALT HOLD로 변경된다. ALT HOLD가 지시되면 PF는 altitude pre-selector window에 missed approach altitude(5,000ft)가 설정되도록 요청한다. 실패접근 도중 MDA가 window에 남아있을 경우 PF가 정확한 FD guidance를 이용할 수 없으므로 이 단계는 매우 중요하다.
'Instrument Procedures Handbook(2017) > 4: Approaches' 카테고리의 다른 글
| (11) Enhanced Flight Vision Systems (EFVS) and Instrument Approaches (0) | 2024.01.09 |
|---|---|
| (12) Vertical Navigation (0) | 2024.01.09 |
| (14) Descents (1) | 2024.01.09 |
| (15) Descent Rates and Glidepaths for Nonprecision Approaches (0) | 2024.01.09 |
| (16) Types of Approaches (1) | 2024.01.09 |