waypoints는 위도/경도 좌표나 fixes로 규정되는 지리적 위치로 이는 RNAV route를, 혹은 RNAV를 사용하는 항공기의 비행경로를 규정하는데 사용된다. waypoints는 특정 지점일수도 있고, 혹은 기존의 NAVAIDs∙intersections∙fixes와 연관될 수도 있다. waypoint는 보통 비행경로를 따라 발생하는 방향, 속도, 혹은 고도의 변화를 나타내기 위해 사용된다. RNAV procedures는 fly-over waypoint와 fly-by waypoint를 모두 사용한다. fly-over waypoint는 항공기가 반드시 통과해야 하는 waypoint이다. fly-by waypoint는 두 개의 직선경로가 교차하는 지점을 표시한 waypoint이다. 이 경우 항공기가 waypoint를 통과하지 않는 대신 정밀하게 계산된 선회를 통해 한 경로에서 다른 경로로 전환한다. [그림 2-53]
User-Defined Waypoints
조종사는 보통 본인의 random RNAV direct navigation을 위하여 user-defined waypoints를 생성한다. 이는 차트에 게재되지 않은 새로이 설정된 fixes로 항법을 위한 경로 안내를 제공하는, 그리고 비행 진행 상황을 확인하는 수단을 제공하는 특정 지리적 위치이다. 해당 waypoints는 보통 bearing/distance, 혹은 위도/경도로 ATC에게 전달된다. user-defined waypoints의 예로는 보통 다양한 수단(keyboard input, 그리고 electronic map mode functions 포함)을 통해 생성된 waypoints를 포함한다.
또 다른 예로 offset phantom waypoint가 있다. 이는 NAVAIDs(예를 들어 VORTACs와 TACAN)로부터의 bearing/distance에 의해 형성된 특정 지점이다. 차트에 게재되지 않은 waypoints를 비행 계획서에 지정하는 경우 frequency/bearing/distance 형식을 통해 이를 전달할 수 있다. 그리고 해당 waypoints는 자동으로 compulsory reporting points가 된다(단, ATC가 달리 지시한 경우 제외). 위도/경도 항법 시스템을 갖춘 항공기가 FL 390 초과를 비행하는 경우 선회 지점을 규정하기 위해 위도/경도를 사용해야 한다.
Floating Waypoints
floating waypoints(혹은 reporting points)는 conventional airway와 직접 연결되지 않은 한 지점에서 airspace fixes를 나타낸다. 대부분의 경우 이는 ATC metering fixes, holding points, RNAV-direct routing, gateway waypoints, STAR origination points, 그리고 SID terminating points의 목적으로 설정될 수 있다. 그림 2-54의 low altitude en route chart는 세 개의 floating waypoints를 나타낸다: SCORR, FILUP, 그리고 CHOOT. 해당 waypoints는 발음이 가능한 다섯 글자의 명칭을 가진다. 조종사는 명칭이 비슷한 waypoints를 주의해야 한다. 2-54의 high altitude en route chart에서 SCORR가 아닌 SCOOR라는 명칭의 floating waypoint가 존재한다. 이는 데이터베이스를 기반으로 하는 항법 시스템에 waypoints를 올바르게 입력하는 것이 중요함을 강조한다. 항법 시스템에 waypoint 문자를 하나라도 잘못 입력할 경우 비행에 악영향을 미칠 수 있다. 또한 SCOOR floating reporting point는 SWAP(Severe Weather Avoidance Plan) en route chart에도 표시된다. 악천후가 동해안에 영향을 미치는 경우 이러한 waypoints와 SWAP routes가 조종사와 관제사에게 도움을 제공한다.
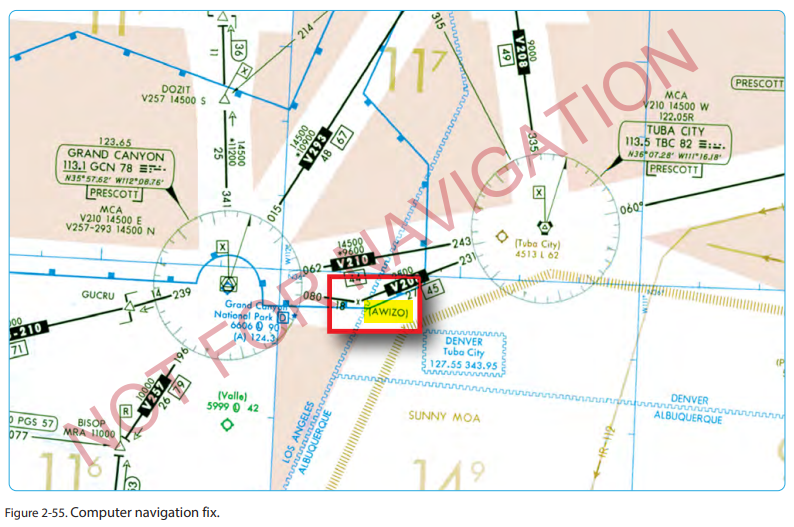
RNAV의 필수 요소로는 보통 항법 데이터베이스가 포함된다. GPS 수신기는 기본적으로 “to-to” navigators이므로 항상 특정 지점을 향하여 이동해야 한다. overlay approaches에서 만약 발음이 가능한 다섯 글자의 명칭이 waypoint나 fix에 게재되어있지 않다면 여기에 영숫자로 구성된 데이터베이스 식별자가 부여된다. 이러한 지점들은 접근 절차 데이터베이스의 waypoint 목록에 표시되지만 접근 차트에는 표시되지 않을 수 있다. 컴퓨터 시스템(예를 들어 GPS나 FMS)이 navigation track을 규정하기 위해 사용하는 지점들을 CNF(Computer Navigation Fix)라 부른다. 일부 GPS overlay approaches에서 CNF는 unnamed DME fixes, DME arcs의 시작 지점과 종료 지점, 그리고 VOR∙NDB∙ILS final approach fixes(FAFs)를 포함한다.
FAA는 CNF에 다섯 글자의 명칭을 할당하는, 그리고 다양한 항공 제품에 CNF를 표시하는 프로그램을 시작하였다. [그림 2-55] CNF가 항공 교통 관제 목적으로 사용되어서는 안 된다. CNF는 기존의 reporting points, fixes, intersections, 그리고 waypoints와 구분되도록 표시된다. CNF의 명칭은 괄호 안에 표시된다(예를 들어 (MABEE)). CNF가 기존의 지점(예를 들어 crossing radials나 radial/DME로 규정된 지점)이 아닌 경우에는 해당 지점에 X가 표시된다. CNF는 비행 계획서나 교신에서 사용되지 않는다. 이러한 fixes를 설명할 경우 통상적인 용어(예를 들어 facility name, radial, distance)를 사용한다.
오늘날 많은 RNAV 시스템들로 인하여 en route charts가 여전히 필수적이라는 사실을 잊게 된다. 데이터베이스는 항법 안내와 상황 인식을 제공하기 위한 것이지 종이 차트를 대체하기 위한 것이 아니다. GPS나 FMS를 사용하여 비행하는 경우 시스템의 한계를 이해하는 것이 중요하다(예를 들어 불완전한 정보, 로딩될 수 없는 절차, 복잡한 절차, 그리고 데이터베이스 저장용량 한계).
RNP(required navigation performance)는 onboard navigation monitoring and alerting을 갖춘 RNAV이다. 또한 RNP는 특정 공역 내를 운항하는데 필요한 항법 성능을 명시한다. RNP의 중요한 요소는 항법 시스템이 달성한 항법 성능을 모니터링 하는 기능, 그리고 운영상 조건의 충족 여부를 조종사가 식별할 수 있도록 하는 기능이다. 따라서 이러한 onboard performance monitoring and alerting 기능은 ATC 개입, 그리고/혹은 route separation에 대한 의존도를 낮춰 운항의 안전성을 확보할 수 있다. 항공기의 RNP 성능은 전반적인 containment를 충족하기 위한 separation criteria를 결정하는데 있어 중요한 요소이다.
항공기의 RNP 성능은 항공기 장비, 그리고 항법 인프라에 따라 달라진다. 예를 들어 항공기가 RNP 1.0에 대한 장비 및 증명을 가졌다 하여도 제한된 NAVAID 범위로 인하여 RNP 1.0 operations가 불가능할 수 있다.
RNP Levels
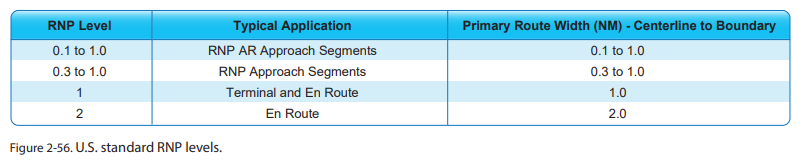
RNP level은 특정 공역, 경로, 혹은 절차에 적용된다. RNP level은 보통 절차나 경로의 중심선으로부터 NM 단위로 표시되는 값이다. 또한 RNP 프로그램은 RNP level의 몇 배수에 해당하는 수준에서(예를 들어 2배의 RNP level) 잠재적 오차를 고려한다.
Standard RNP Levels
일반적인 RNP airspace를 지원하는 표준 수치가 그림 2-56에 나타나 있다. 또한 ICAO, 다른 국가, 그리고 FAA가 인정하는 이 외의 RNP levels가 사용될 수도 있다.
Application of Standard RNP Levels
RNAV operations를 지원하는 다양한 경로 및 절차들에 사용되는 RNP Levels는 보통 특정 항법 시스템이나 센서를(예를 들어 GPS), 혹은 적절한 성능을 갖춘 multi-sensor RNAV systems를 기반으로 할 수 있다.
Note: RNP의 항법 성능은 특정 센서의 정확도 수준을, 그리고 항공기가 비행하는 정밀도를 의미한다. 특정한 비행 절차는 RNP level마다 다를 수 있다.
MEAs(Minimum En Route Altitudes), MRAs(Minimum Reception Altitudes), MAAs(Maximum Authorized Altitudes), MOCAs(Minimum Obstacle Clearance Altitudes), MTAs(Minimum Turning Altitudes), 그리고 MCAs(Minimum Crossing Altitudes)는 Federal airways와 몇몇 off-airway routes에서의 계기비행을 위하여 설정되었다. 사용될 NAVAID가 적절하고, airways나 routes의 방향이 적절하며, 규정된 경로 폭 내에서 비행이 유지될 수 있다고 판단된 후에 고도가 설정된다.
IFR operations의 경우 조종사는 minimum altitudes 이상으로 항공기를 비행해야 한다. IFR 조종사는 해당하는 minimum altitudes 이하로 비행할 수 없다(단, 이착륙에 필요한 경우는 제외). 만약 minimum altitude가 규정되어있지 않다면 비행할 경로로부터 4NM 수평 거리 이내에 있는 가장 높은 장애물로부터 2,000ft 이상의 고도를 이용한다. 이는 산악 지역상공을 운영할 때 적용된다. 그 외의 경우에는 비행할 경로로부터 4NM 수평 거리 이내에 있는 가장 높은 장애물로부터 1,000ft 이상의 고도를 이용한다. 특정 route나 route segment에 MEA와 MOCA가 둘 다 규정되어 있다면 조종사는 MEA와 MOCA 사이를 비행할 수 있다(단, VOR로부터 22NM 이내에 있는 경우에만). 더 높은 minimum IFR altitude(MIA)로 상승해야 한다면 조종사는 해당 minimum altitude가 적용되는 지점을 지나자마자 즉시 상승을 시작해야 한다(단, 지상 장애물이 존재하는 경우에는 해당 minimum altitude가 적용되는 지점을 MCA 이상으로 교차해야 한다).
※ 다음은 Jeppesen Airway Manual을 발췌한 내용이다. 산악 지역의 정의는 다음과 같다:
MOUNTAINOUS AREA(ICAO) - 10NM 거리 내에서 지형 표고의 변화가 900m(3000ft)를 초과하는 영역.
IFR 비행 계획서로 비행 도중 ATC로부터 VFR conditions on top을 승인받았다면 조종사는 minimum en route IFR altitudes 이상을 비행해야 한다. minimum altitude는 항공기와 지형 사이의 수직 분리를 보장하기 위해 설계되었다. 이러한 고도들은 IFR 기상 조건이건 VFR 기상 조건이던 관계없이, 그리고 특정 고도를 할당받았건 VFR conditions on top을 할당받았건 관계없이 모든 IFR 항공기에 적용된다.
Minimum En Route Altitude(MEA)
MEA는 두 radio fixes 사이에서 항법 신호 범위를 보장하고 장애물 회피 조건을 만족하는 가장 낮은 고도이다.Federal airway or segment, RNAV low or high route, 혹은 그 외의 direct route에 규정된 MEA는 radio fixes 사이의 전체 폭에 적용된다. 관제 공역 내에 완전히 포함된 route의 경우 MEA는 보통 관제 공역의 하단으로부터 완충 공간을 제공한다(transition areas의 경우 최소 300ft, 그리고 control areas의 경우 500ft). MEA는 지형과 장애물로부터의 간격, 항법 시설 성능의 적합성, 그리고 교신 조건에 기초하여 설정된다.
RNAV Minimum En Route Altitude
몇몇 IFR en route low altitude charts에 RNAV MEAs가 표시된다. 이 덕분에 RNAV 조종사와 non-RNAV 조종사가 계기 항법을 위해 동일한 차트를 사용할 수 있다.
Minimum Reception Altitude(MRA)
fix를 규정하는 NAVAID 시설의 항법 신호를 수신할 수 있는 minimum altitude를 설정하기 위하여 MRA가 결정된다. fix에서의 MRA가 MEA보다 높으면 해당 fix에 MRA가 설정되며 이는 intersection이 결정될 수 있는 가장 낮은 고도가 된다.
Maximum Authorized Altitude(MAA)
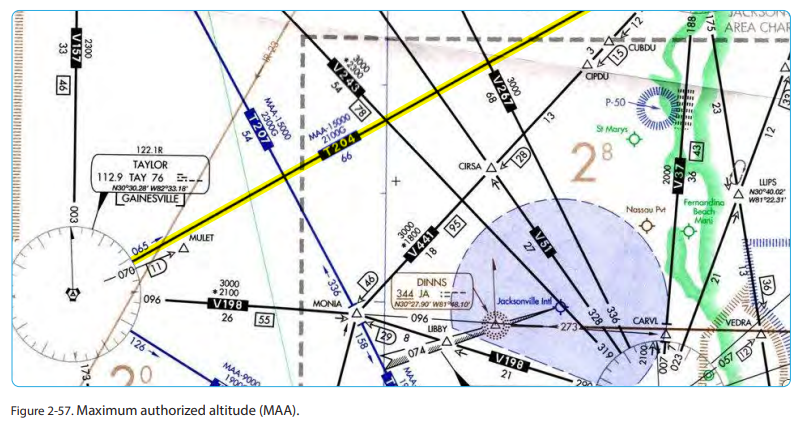
MAA는 airspace structure나 route segment에 대해 이용 가능한 최대 altitude/flight level이다. [그림 2-57] 이는 MEA가 지정된 Federal airway, jet route, NRAV low or high route, 혹은 그 외 direct route의 가장 높은 고도를 의미한다. MAA는 기술적 한계나 기타 요인들(예를 들어 공역 제한, 혹은 지상 시설 주파수 간섭)에 의해 결정되는 절차상 한계를 나타낸다.
Minimum Obstruction Clearance Altitude(MOCA)
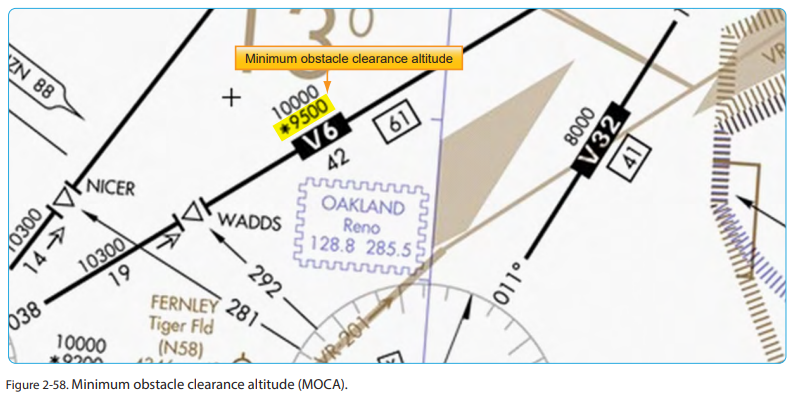
MOCA는 VOR airways, off-airway routes, 혹은 route segments의 fix들 사이에서 장애물 회피 조건을 만족하는 가장 낮은 고도이다. [그림 2-58] 항공기가 VOR로부터 22NM 이내에 있다면 이 고도는 항법 신호 범위도 보장한다. en route chart의 MOCA는 primary area의 controlling obstacle에 ROC(required obstacle clearance)를더하여 계산된다. 만약 controlling obstacle이 secondary area에 있다면 MOCA는 TERPS chart를 통해 계산된 다음 가장 가까운 100ft 단위로 반올림된다(즉, 2,049ft는 2,000ft가 되고 2,050ft는 2,100ft가 된다). 산악 지역의 경우에는 보통 1,000ft가 더 추가된다.
관제사는 조종사가 장애물을 회피하도록 돕는 중요한 역할을 가진다. 항공기가 지형, 장애물, 혹은 다른 항적으로부터 안전하지 않은 위치에 놓여 있다 판단될 경우 관제사는 safety alert를 발부한다. 조종사가 상황 해결을 위해 조치를 취했다 알리면 관제사는 추가 경보를 발행하지 않을 수 있다. 일반적인 지형/장애물 경보는 다음과 같을 수 있다: “(Aircraft call sign), Low altitude alert. Check your altitude immediately. the MOCA in your area is 12,000.”
Minimum Turning Altitude(MTA)
MTA는 특정 fixes, NAVAIDs, waypoints, 그리고 route segments 상공에서의 turn criteria를 기반으로 수직/수평 장애물 회피를 제공하는 고도이다. [그림 2-59] VHF airway나 route가 NAVAID나 fix에서 종료되는 경우 primary area는 해당 종료 지점 너머로 연장된다. VHF airway와 routes에서 경로 전환이 필요한 경우에는 en route obstacle clearance turning area가 primary/secondary obstacle clearance areas를 연장시킨다. 이는 항공기의 선회 반경을 수용하기 위함이다. fix 상공에서, 혹은 fix 통과 후에 선회를 수행하면 airway/route 경계를 넘어설 수 있으므로 조종사는 fix 전에 선회를 수행함으로써 airway/route protected airspace를 준수해야 한다. 선회 영역은 turn anticipation(fix에 도달하기 전에 선회)과 flyover protection(fix를 통과한 후에 선회) 모두에게 장애물 회피를 제공한다. 이는 airway의 중심선을 따라 비행해야 하는 조건을 위반하지 않는다. 조종사에게 충분한 장애물 회피를 제공하기 위하여 많은 요인들이 선회 영역에 적용된다. 이러한 요인들에는 항공기 속도, NAVAID 거리 대비 선회의 양, 비행경로, 곡선 반경, MEAs, 그리고 MTA가 포함될 수 있다. [그림 2-60]
10,000ft MSL 이상에서는 대기 속도가 많이 증가한다. 따라서 차트의 MEA가 장애물 회피에 충분한지를 확인하기 위하여 turning fix 근처의 넓은 영역이 검사된다. 일부 위치의 경우(보통 산악 지역) 넓은 영역 내의 지형/장애물로 인하여 선회 기동 도중 더 높은 minimum altitude가 필요할 수 있다. 더 높은 MTA를 필요로 하는 turning fixes에는 깃발 기호가 표시되며 MTA restriction을 설명하는 텍스트가 표시된다. [그림 2-59]
MTA restriction은 보통 turning fix로 향하는 ATS route, turning fix로부터 이어지는 ATS route, 그리고 고도로 구성된다(예: MTA V330 E TO V520 W 16000). MTA가 본인의 비행경로에 적용되는 경우 조종사는 선회를 시작하기 전에 차트의 MTA 이상을 유지해야 한다. 그리고 선회 후 ATS route의 중심선에 설정되기 전까지는 MTA 이상을 유지해야 한다. 중심선에 설정된 후에는 MEA/MOCA가 minimum altitude를 결정한다.
또한 MTA는 특정 고도나 특정 고도 범위를 제한할 수 있다. 예를 들어 MTA는 10,000ft ~ 11,000ft MSL을 제한할 수 있다. 이 경우 11,000ft 이상의 고도와 10,000ft 이하의 고도는 허가된다(단, MEA/MOCA 조건이 만족된다면).
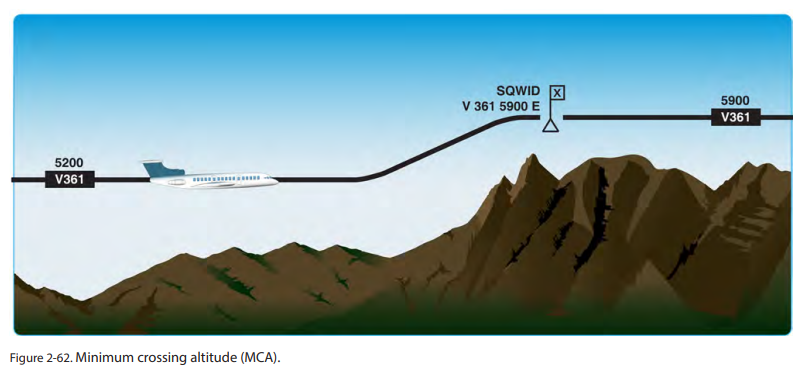
Minimum Crossing Altitude(MCA)
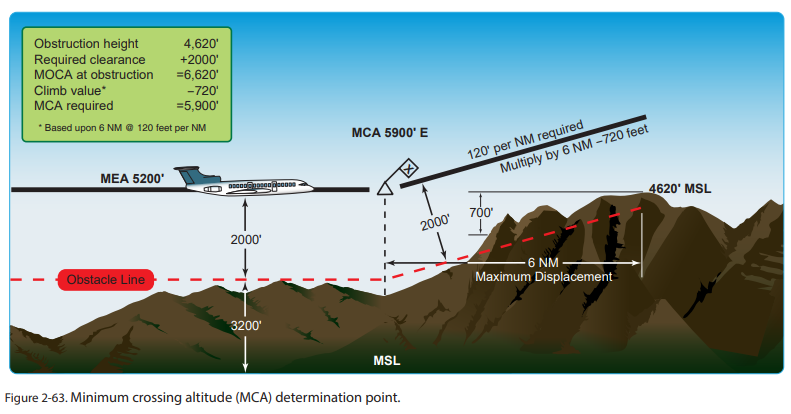
MCA는 더 높은 minimum en route IFR altitude로 향할 때 항공기가 통과해야 하는 특정 fix에서의 가장 낮은 고도이다. [그림 2-62] 이에 해당하면 MCA가 en route chart에 표시된다. [그림 2-59] 더 높은 MEA가 적용되는 지점을 통과한 후에 상승을 수행할 시 장애물 회피가 유지되지 않는다면 MCA가 설정된다. MCA 설정 시 primary/secondary areas에 대한 en route 장애물 회피 조건이 동일하게 고려된다. MCA를 결정하는 기준은 다음의 climb gradients를 기준으로 하며 비행 고도로부터 계산된다:
•sea level ~ 5,000ft MSL–NM당150ft
•5,000ft ~ 10,000ft MLS–NM당120ft
•10,000ft이상–NM당100ft
MCA를 결정하기 위해 장애물로부터 fix까지의 거리가 계산된다. [그림 2-63] 고도 변경이 경로 변경을 수반하는데 만약 고도 변화가 1,500ft 이상이라면, 혹은 경로 변화가 45도 이상이라면 course guidance가 제공되어야 한다(단, 이 규칙에는 예외가 있다. 만약 이전 airway나 route segment의MEA 조건을 통과하는 장애물이 없다면 course guidance 없이 최대 90도의 경로 변경이 승인될 수 있다). 미국 공역 바깥에서 비행할 때 조종사는 MCA와 관련하여, 그리고 하나의 MEA에서 더 높은 MEA로 전환하는 것과 관련하여 다른 비행 절차를 접할 수 있다. 이 경우 조종사는 MCA와 유사한 fix를 통해 더 높은 MEA로 상승해야 한다. 미국 공역 바깥에서 비행할 때 조종사는 비행 절차의 차이점을 철저히 검토해야 한다. [그림 2-64]
Minimum IFR Altitude(MIA)
IFR operations를 위한 minimum altitudes는 14 CFR Part 91에 규정되어 있다. MIA는 항공 차트에 게재되어 있으며 airway와 routes의 경우 14 CFR Part 95에, 그리고 standard instrument approach procedures의 경우 14 CFR Part 97에 규정되어 있다. 14 CFR Parts 95나 97에 해당 minimum altitude가 규정되어 있지 않은 경우에는 다음의 MIA가 적용된다: 산악 지에서는 비행경로 상 4NM의 수평 거리 내에 위치한 가장 높은 장애물로부터 2,000ft, 혹은 그 외의 지역에서는 비행경로 상 4NM의 수평 거리 내에 위치한 가장 높은 장애물로부터 1,000ft. MIA는 교신 성능에 대한 비행 검사를 받지 않는다.
Minimum Vectoring Altitudes(MVA)
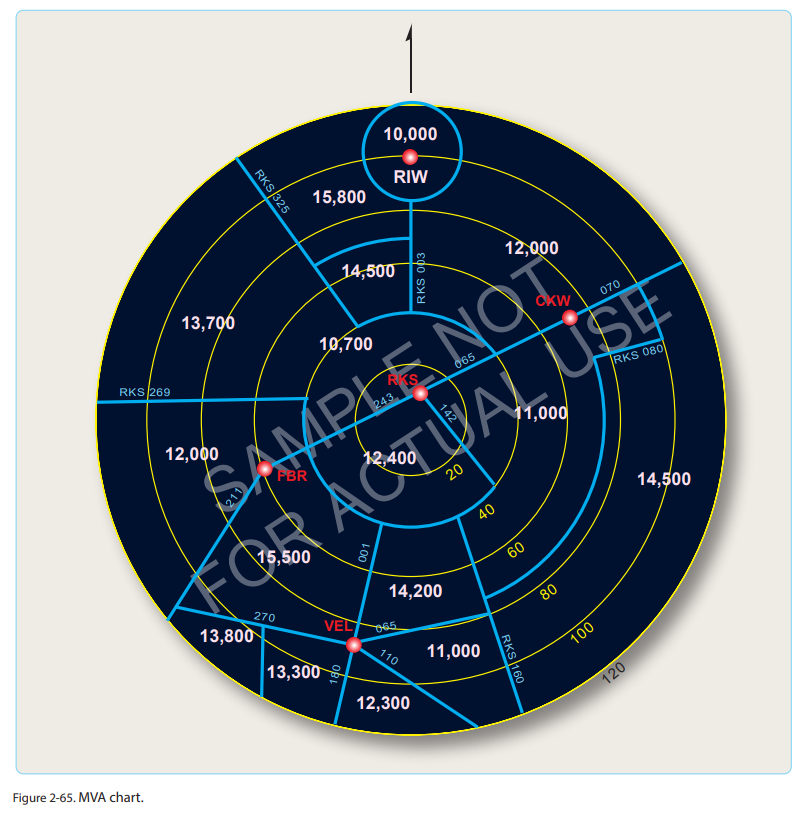
radar ATC가 사용되는 경우 ATC를 위하여 MVA가 설정된다. MVA는 비산악지역의 경우 가장 높은 장애물로부터 1,000ft의 간격을, 그리고 산악 지역의 경우 가장 높은 장애물로부터 2,000ft의 간격을 제공한다. 특정 장애물을 구분할 수 있는 능력 덕분에 일부 MVA가MEA, MOCA, 혹은 그 외 minimum altitudes보다 낮을 수도 있다. ATC가 할당하는 IFR altitude는 보통 MVA 이상이다.
관제사는 항공기로부터 충분한 레이더 반사 신호를 수신하는 경우에만 MVA를 사용한다. 상황 인식은 항상 중요하다(특히 점점 더 높은 MVA sectors로 상승하는 동안 radar vector를 받는 경우). 상승 도중 조종사가 다음 섹터의 MVA 이상이지 않는 한 더 높은 MVA sector로 vector 되서는 안 된다(단, diverse vector areas가 설정된 영역인 경우 제외). 산악 지역에서 terminal routes와의 호환을 위해, 혹은 계기 접근 절차로 향하는 vectoring을 위해 더 낮은 MVA가 필요한 경우 ASR(Airport Surveillance Radar)을 통해 1,000ft의 장애물 간격이 승인될 수 있다. MVA는 관제 공역의 하단으로부터 최소 300ft의 고도를 제공한다. MVA charts는 최대 레이더 범위로 개발된다. 섹터들은 지형 및 장애물로부터 분리를 제공한다. 각 MVA chart는 섹터 내 항공기의 vectoring을 수용할 수 있을 만큼 큰 섹터들을 가진다. [그림 2-65]
IFR Cruising Altitude or Flight Level
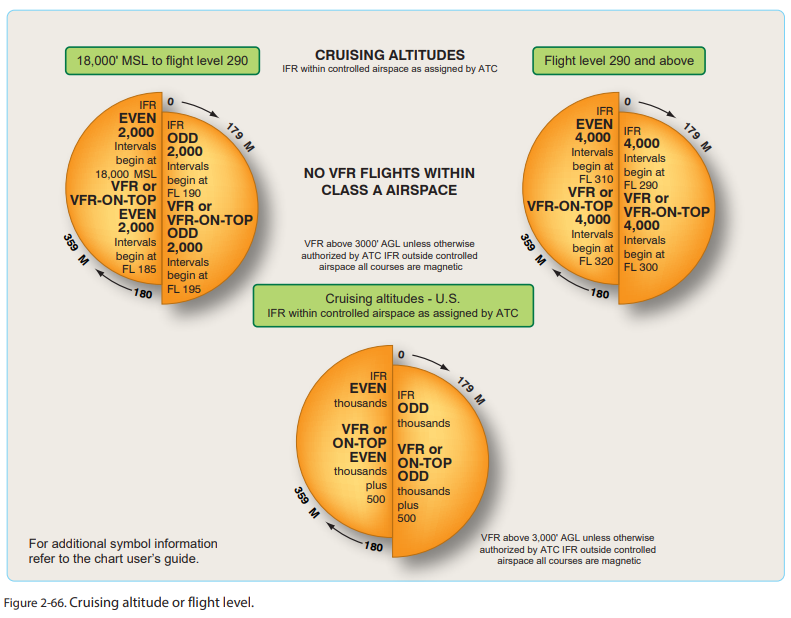
관제 공역 내에서 조종사는 ATC가 할당한 altitude/flight level을 반드시 유지해야 한다. 만약 “VFR conditions on-top”을 할당받았다면 14 CFR Part 91, 91.159에서 규정하는 altitude/flight level을 유지해야 한다. 비관제 공역에서 IFR 하에 순항 비행을 하고 있다면 IFR en route high/low altitude charts의 legend에 표시된 적절한 고도를 유지해야 한다(단, 2분 이하의 holding pattern 체공도중, 혹은 선회도중 제외). [그림 2-66]
※ 다음은 항공안전법 시행규칙 별표 21 순항고도(제164조제1항제2호 및 제3호 관련)를 발췌한 내용이다(시행 2024.3.13).
18,000ft MSL 미만에서 VFR-on-top clearance에 따라 운영 중인 경우 비행 방향에 적절한 순항 고도(MEA와 18,000ft MSL 사이의)를 선택하여 VFR conditions가 유지되도록 할 수 있다. 모든 고도 변경을 ATC에 보고해야 하며 조종사는 이 외의 모든 IFR reporting procedures를 준수해야 한다. A등급 공역에서는 VFR on-top이 인가되지 않는다. 18,000ft MSL 미만을 순항하는 경우 현 위치로부터 100NM이내에 있는 station의 altimeter setting을 설정해야 한다. weather-reporting stations가 100NM 이상 떨어져있는 경우에서는 가장 가까운 station의 altimeter setting이 사용될 수 있다.
IFR 비행 도중 ATC는 정기적으로 최신 altimeter setting을 알려준다. 허나 적절한 시기에 altimeter setting을 업데이트하는 것은 조종사의 책임이다. altimeter setting은 U.S. National Weather Service가 운영하는(혹은 승인하는) 기상 보고 시설로부터, 또는 FAA가 승인한 출처로부터 확인될 수 있다. 몇몇 commercial operators는 정부가 승인하는 기상 정보 출처의 역할을 수행할 수 있다.
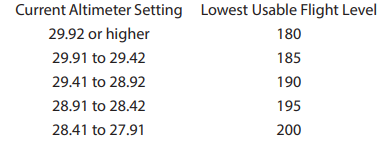
18,000ft MSL 이상을 비행하기 위해선 altimeter를 29.92"Hg로 설정해야 한다. FL(flight level)은 29.92"Hg의 reference datum과 관련된 일정한 대기압 수준으로 규정된다. flight level은 세 자리 숫자로 표시된다. 예를 들어 FL 250은 25,000ft를 나타낸다. altimeter settings가 29.92"Hg보다 낮을 경우 18,000ft 이하를 운영 중인 항적과 충돌이 발생할 수도 있다. 따라서 14 CFR Part 91, 91.121은 특정 altimeter setting 범위에 대한 lowest usable flight levels를 명시한다.
※ 다음은 항공안전법 시행규칙 제 165조(기압고도계의 수정)를 발췌한 내용이다(시행 2024.3.13).
법 제67조에 따라 비행을 하는 항공기의 기압고도계는 다음 각 호의 기준에 따라 수정해야 한다.
1.전이고도 이하의 고도로 비행하는 경우에는 비행로를 따라185킬로미터(100해리)이내에 있는 항공교통관제기관으로부터 통보받은QNH[185킬로미터(100해리)이내에 항공교통관제기관이 없는 경우에는 제229조제1호에 따른 비행정보기관 등으로부터 받은 최신QNH를 말한다]로 수정할 것
2.전이고도를 초과한 고도로 비행하는 경우에는 표준기압치(1,013.2헥토파스칼)로 수정할 것
Reduced Vertical Separation Minimums(RVSM)
RVSM은 FL 290(29,000ft) ~ FL 410(41,000ft)을 비행하는 항공기들 간에 필요한 수직 분리가 2,000ft에서 1,000ft로 감소됨을 설명하기 위해 사용되는 용어이다. 그 목적은 공역의 특정 범위를 안전하게 비행할 수 있는 항공기의 수를 증가시키기 위함이다. 기존의 수직 분리 기준은 다음과 같았다:
· 지표면~ FL 290: 1,000ft
· FL 290 ~ FL 410: 2,000ft
· FL 410이상: 4,000ft
이는 기압 고도계의 정확성이 고도에 따라 감소하기 때문이다. 허나 현재는 고도계와 결합된 ADC(air data computers)가 더욱 정확해졌으며 autopilots는 특정 고도를 유지하는데 더욱 뛰어나졌다. 따라서 ICAO는 이를 1,000ft로 감소시킬 것을 제안하였다.
특별한 증명을 받은 고도계와 autopilots를 갖춘 항공기만이 RVSM airspace를 비행할 수 있다. 그렇지 않은 경우에는 RVSM airspace보다 높은/낮은 고도를 비행하거나, 혹은 장비 조건에 대한 특별 면제를 요청해야 한다. 또한 RVSM airspace를 운영하기 위해선 항공기 등록 정부로부터 특정 승인을 받아야 한다. non-RVSM항공기가 특정 공역 내에서 지속적으로 상승/하강하는 동안 2,000ft의 수직 분리가 다른 모든 항공기들과 유지될 수 있다면RVSM airspace를 통과할 수 있다.
※ 다음은 고정익항공기를 위한 운항기술기준을 발췌한 내용이다(시행 2024.3.11)
7.1.16 특별운항에 관한 요건(Requirements for Specific Operations)
7.1.16.1 수직분리축소(RVSM) 공역의 운항을 위한 요건(Requirements for Operations in RVSM Airspace)
가. 지역항행협정에 의거 300m의 수직분리최저치가 적용되는 FL290부터 FL410까지의 공역(이하 수직분리축소공역이라 한다)을 운항하고자 하는 항공기는 조종사에게 비행중인 고도를 전시해 주고, 지정된 고도를 자동으로 유지하고, 항공기가 지정된 고도를 ± 90m(300ft) 이상 이탈하는 경우 경고하고, 기압고도를 자동으로 알려주는 장비를 구비하여야 한다.
나. 항공기 운영자는 수직분리축소공역으로 지정된 공역을 운항하려면 국토교통부장관 또는 지방항공청장의 승인을 받아야 한다.
다. 국토교통부장관 또는 지방항공청장은 다음 각 호의 사항을 확인하고 적합한 경우 수직분리축소공역 운항승인을 발급하여야 하며, 이 경우 운영기준에 승인사항을 명기하여 함께 교부하여야 한다.
1) 비행기의 수직항행성능이 별표 7.1.16.1에 규정된 요건을 충족
2) 지속감항유지프로그램과 관련한 적절한 절차 마련
3) 수직분리축소공역 운항을 위한 적절한 운항승무원 절차 마련
4) 부속서 11, 제3장, 3.3.5.1에 따른 모니터링 기관에서 발행한 고도유지성능 보고서(Reports of height-keeping performance)를 수령하고, 동 보고서 상에 RVSM공역 내에서 고도유지요건을 충족하지 못하는 특정 항공기, 항공기 형식, 항공기 운영자가 식별된 경우 즉각적인 개선조치를 실시하기 위한 절차가 수립되어 있을 것
라. 항공기 소유자등은 보유한 각 형식의 항공기 그룹마다 최소 2대의 비행기를 선정하여 최소 2년에 한 번 또는 매 1,000 비행시간 간격(이중 더 긴 기간을 기준으로 한다) 이내로 고도유지 성능을 모니터링하여야 한다. 만일 소유자등의 항공기 형식 그룹이 한 대의 비행기로만 구성되어 있으면 규정된 기간 이내에 해당 비행기의 고도유지 성능을 모니터링하여야 한다. 주 - 부속서 11, 3.3.5.2에 따라 수립된 지역 감시 프로그램(regional monitoring programme)에 의한 고도유지 성능 모니터링 자료는 본 항의 요건을 충족하기 위하여 사용될 수 있다.
마. 국토교통부장관 또는 지방항공청장은 부속서 11, 3.3.5.1의 규정에 따라 수립된 감시당국에 의해 발행되는 고도유지 성능에 관한 모니터링 결과 보고서를 접수하고 항공기 운용자에게 수정 조치지시 등 후속 처리하여야 한다.
바. 항공기 운영자는 마항에 따라, 국토교통부장관 또는 지방항공청장이 수정조치를 지시한 경우, 수정 지시를 접수한 즉시, 해당 항공기 또는 항공기 형식 그룹에 대해 신속한 수정조치를 이행하여야 한다.
사. 조종사는 인가된 비행계획에 영향을 주는 위급상황(장비고장, 기상상황 등)이 발생한 경우 필히 항공교통관제기관에 보고해야 한다.
아. 다음과 같은 장비고장이 발생 시에는 조종사는 항공교통관제기관에 필히 보고해야 한다.
1) 항공기에 탑재된 자동고도유지 장치의 고장
2) 고도측정시스템의 제한치 초과
3) 고도보고 트랜스폰더의 고장
4) 고도의 강하가 필요한 엔진의 고장
5) 인가된 비행계획에 영향을 주는 기타 다른 장비의 고장
Cruise Clearance
“maintain” 대신 “cruise”라는 용어를 통해 항공기에 공역 구간을 할당할 수 있다. 해당 구간은 minimum IFR altitude부터 cruise clearance에서 명시된 고도까지 확장된다. cruise clearance 도중 이 구간 내의 중간 고도에서 수평을 유지할 수 있다. 조종사는 해당 구간 내에서 본인의 재량대로 상승/하강을 수행할 수 있다. 다만 하강을 시작하였으며 ATC에게 해당 고도를 벗어났음을 보고하였다면 그 고도로 되돌아갈 수 없다. 또한 cruise clearance는 목적지 공항에서 접근을 수행할 수 있는 권한도 부여한다.
Lowest Usable Flight Level
대기압이 31.00"Hg 이하이고 조종사가 18,000ft MSL 이하를 비행하는 경우에는 최신 altimeter setting을 사용한다. 항공기가 계기 비행 계획서에 따라 en route에 놓인 경우 관제사는 항공기가 본인의 관할 구역 내에 있는 동안 적어도 한 번은 이 정보를 제공한다. 대기압이 31.00"Hg를 초과하는 경우에는 해당 영역을 규정하는 NOTAM에 의해 다음 절차가 적용된다: 18,000ft MSL 미만에서 en route operations를 수행하는 경우 31.00"Hg를 설정하며 해당 영역을 벗어나기 전까지는 이 설정을 유지한다. ATC는 18,000ft MSL 미만에서 en route operations를 수행하는 조종사에게 실제 altimeter settings를 발부하며 고도계에 31.00"Hg를 설정할 것을 알린다. 만약 31.00"Hg를 초과하는 altimeter setting을 항공기가 설정할 수 있으며 해당 기압을 측정할 수 있는 공항을 향하여 운항하는 경우에는 추가적인 제한이 적용되지 않는다. 18,000ft MSL 이상에서는 고도계를 29.92"Hg(표준 세팅)으로 설정해야 한다. en route 구간 이후에도 추가적인 절차가 존재한다.
lowest usable flight level은 운영 지역의 대기압에 의해 결정된다. A등급 공역을 운영 중인 조종사는 local altimeter setting이 29.92"Hg 이하로 떨어질수록 점차 높은 지시 고도를 순항해야 한다. 이는 low altitude structure를 운영 중인 항공기와 분리를 보장하기 위함이다. 해당 고도는 다음과 같다:
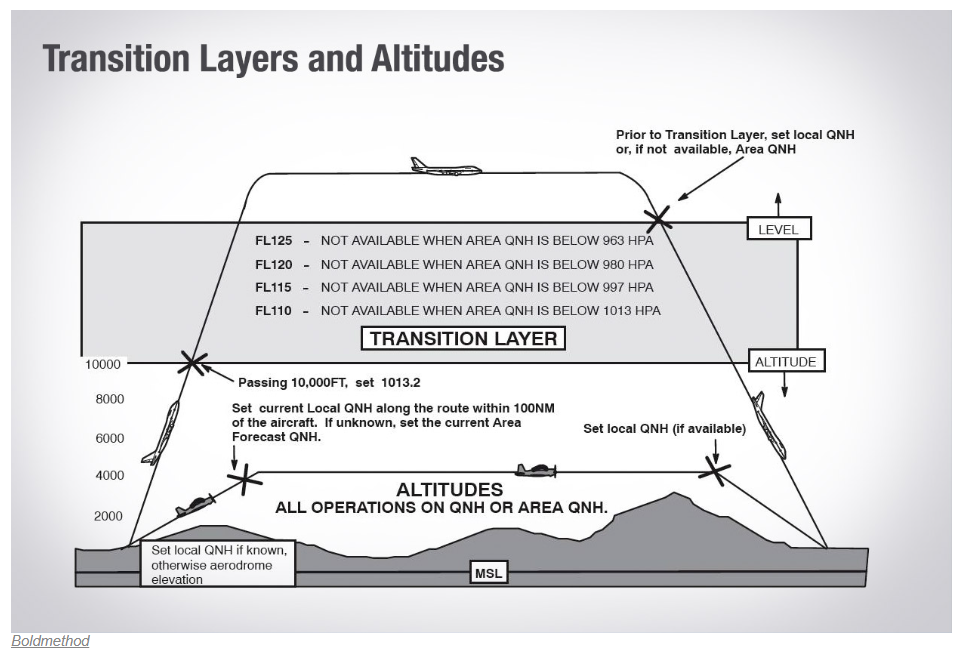
다른 국가의 공역으로 진입할 때 조종사는 절차의 차이점과 공역의 차이점을 인지해야 한다. 예를 들어 Moncton FIR(flight information region)을 향하여 북쪽으로 비행하는 경우 transition level(QNE)이 transition altitude(QNH)로 변화함을 알 수 있다 [그림 2-67].
국제 공역을 운항하는 조종사들은 세 가지 유형의 altimeter settings를 알아야 한다. 대부분의 해외 공항은 altimeter settings를 hectopascals(hpa)(millibars) 단위로 제공한다. 따라서 조종사나 장비가 inches of mercury를 hpa로, 혹은 hpa를 inches of mercury로 정확하게 변환할 수 있어야 한다.
Altitude Above Ground(QFE)
airport altimeter datum(보통 활주로의 approach end를 의미함)에서 측정된 기압에 해당하는 local altimeter setting. airport altimeter datum에서 QFE로 설정된 고도계는 0을 지시한다. transition altitude 이하, 그리고 transition level 미만을 운항하는 동안 고도계를 QFE로 설정한다. 공항에서 고도계는 “0”ft를 나타낸다.
Barometric Pressure for Standard Altimeter Setting(QNE)
transition altitude 이상에서는 altimeter setting(en route)을 사용한다. QNE altitude의 경우 altimeter setting은 항상 29.92"Hg/1013.2hPa이다. transition levels는 국가마다 다르므로 조종사들은 해외에서 상승/하강을 수행할 때 특히 주의해야 한다.
Barometric Pressure for Local Altimeter Setting(QNH)
airport altimeter datum에서 측정된 기압을 해수면 기압으로 보정한 값. airport altimeter datum에서 QNH로 설정된 고도계는 MSL(mean sea level)로부터의 공항 표고를 나타낸다. transition altitude 이하, 그리고 transition level 미만을 운항하는 동안 고도계를 QNH로 설정한다.
공항 주변 비행 시 transition altitude 이하에서는 항공기의 수직 위치를 QNH나 QFE로, 그리고 transition level 이상에서는 QNE로 표현한다. transition layer 통과 시 상승 중이라면 항공기의 수직 위치를 FL로, 그리고 하강 중이라면 altitudes로 표현한다.
(출처: boldmethod)
1 순위 착륙 허가를 받은 항공기가 QFE를 사용하여 접근을 수행하고 있다면 QFE를 사용할 수 있는 비행 구간 도중 항공기의 수직 위치를 공항 표고로부터의 높이로 표현한다.
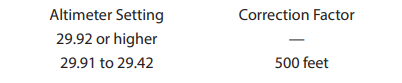
대부분의 기압 고도계는 기계적 오차, 탄성 오차, 온도 오차, 그리고 설치 오차의 영향을 받는다. 또한 극도로 추운 온도에서는 적절한 고도계 보정 계수가 필요할 수 있다.
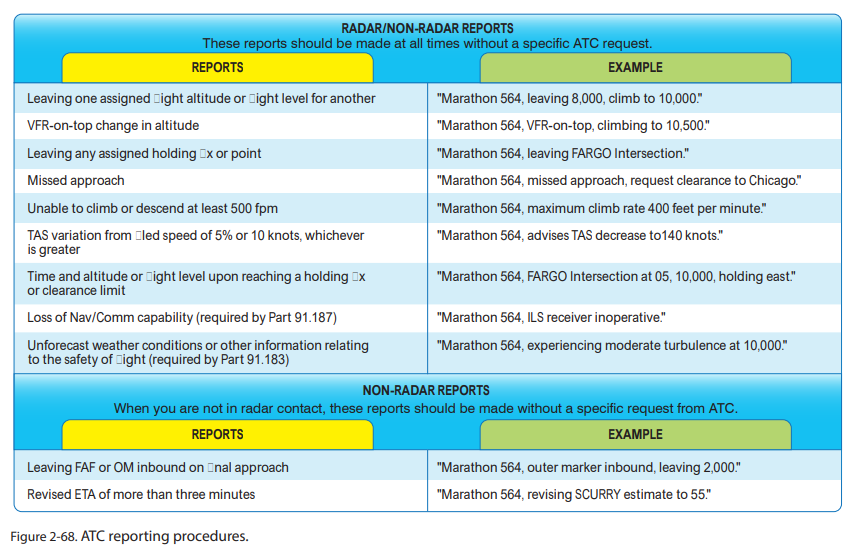
ATC의 특정 요청이 없어도 수행되어야 하는 보고가 있다. 특정 보고들은 ATC와의 radar contact 여부에 관계없이 항상 이루어져야 한다. 반면 그 외의 보고들은 radar contact lost, 혹은 radar contact terminate 시에만 필요하다. [그림 2-68]
Non-Radar Position Reports
radar contact lost, 혹은 radar service terminate 상황의 경우 조종사는 비행경로를 따라 놓인 특정 VORs 및 intersections에서 ATC에게 위치보고를 제공해야 한다. 이러한 compulsory reporting points는 IFR en route charts에 검은색 삼각형으로 표시된다. 흰색 삼각형은 noncompulsory reporting points로 이는 ATC가 요청하는 경우에만 위치보고가 필요하다. direct course를 비행하는 경우에는 비행계획서에 사용된 fixes에서 보고를 수행한다. 왜냐하면 해당 지점들이 자동으로 compulsory reporting points가 되기 때문이다. compulsory reporting points는 VFR-on-top-clearance에 따라 IFR 비행을 수행하는 경우에도 적용된다.
non-radar environment에서 airway를 비행하든, 혹은 direct route를 비행하든 위치 보고가 필수적이며 특정 정보를 포함해야 한다. 일반적인 위치 보고에는 항공기 위치, 예상되는 경로, 그리고 ETA와 연관된 정보가 포함된다. VOR을 통과할 때 위치 보고가 이루어져야 한다면 TO/FROM indicator가 완전히 반전되었을 때의 시간이 보고되어야 한다. ADF를 이용하여 위치 보고가 이루어져야 한다면 indicator가 완전히 반전되었을 때의 시간이 보고되어야 한다. reporting point를 통과할 때의 시간을 결정하기 위해 aural indication이나 light panel indiction을 사용하는 경우(예를 들어 fan marker, Z marker, cone of silence, 혹은 intersection of range courses) 신호가 처음 수신된 때와 중단된 때를 확인해야 한다. 이 두 시간 사이의 중간 값이 fix 상공에서의 실제 시간으로 간주된다. 만약 위치가 reporting point로부터의 거리/방향으로 주어진다면 거리/방향을 최대한 정확하게 계산해야 한다. ATC는 보통 비행이 수행되는 structure에서 사용되도록 설정되지 않은 보조 기구를 기준으로 위치 보고나 항법을 수행하라 요구하지 않는다(단, terminal area 전환 목적은 제외).
Flight in a Radar Environment
ATC가 “Radar Contact”를 알린 경우 조종사는 특정 reporting points에서의 위치보고를 중단해야 한다. ATC가 “radar contact lost”, 혹은 “radar service terminated”를 알릴 경우 조종사는 정상적인 위치보고를 재개해야 한다. 다음 경우 ATC는 조종사에게 radar contact를 알린다:
1. 해당 항공기가 ATC system에 최초로 식별된 경우.
2. radar service terminate, 혹은 radar contact lost 이후 레이더 식별이 다시 이루어진 경우.
관제사가 radar contact를 알렸다면 이러한 사실은 다른 관제사에게 이양 될 때 조종사에게 반복되지 않는다. 종종 관제 이양을 받은 관제사가 항공기의 신원을 확인하긴 하지만 이를 radar contact lost로 해석해서는 안 된다. 트랜스폰더를 장착한 항공기의 신원을 확인하기 위해 ATC는 조종사에게 “ident,” “squawk standby,” 혹은 코드 변경을 요청한다. 트랜스폰더가 없는 항공기의 경우 ATC는 신원 확인을 위해 항공기의 위치를 알린다. 이때 전달받은 위치가 현 위치와 일치하지 않을 경우 조종사는 관제사에게 알려야 한다. 관제사가 참조하는 NAVAID로 항공기가 동조되어있지 않아 해당 위치 정보의 정확성을 확인할 수 없는 경우 조종사는 항공기에 동조된 NAVAID로부터의 레이더 위치를 요청해야 한다.
Position Report Items
위치 보고에는 다음 항목들이 포함되어야 한다:
1. 항공기 식별부호.
2. 위치.
3. 시간.
4. altitude/flight level(VFR on-top clearance로 비행하는 경우에는 실제 altitude/flight level).
5. 비행계획서 유형(ARTCC나 approach control에 직접 IFR 위치보고를 수행하는 경우에는 필요하지 않음).
6. ETA, 그리고 다음 reporting point의 명칭.
7. 비행경로 상 다다음 reporting point의 명칭.
8. 관련 비고사항.
Additional Reports
다음 사항들은 ATC의 특별한 요청이 없어도 ATC나 FSS에 보고되어야 한다:
1. 새로이 할당된 altitude/flight level을 위해 이전에 할당받았던 altitude/flight level을 떠날 때.
2. VFR-on-top clearance로 비행 도중 고도 변화를 수행할 때.
3. 최소 500fpm의 상승률로 상승/강하가 불가능할 때.
4. 접근에 실패하였을 때(특정 조치를 위한 clearance를 요청한다. 예를 들어 교체비행장, 혹은 다른 접근).
5. 비행 계획서에 제출된 평균 진대기속도(순항 고도에서의)가 5%, 혹은 10노트(둘 중 더 큰 것) 변화할 때.
Note: 레이더 서비스가 제공되고 있는 경우 military terminal area facilities에서 계기 훈련 중인 조종사는 6번과 7번을 생략할 수 있다.
8. 관제 공역 내에서 VOR∙TACAN∙ADF∙low frequency navigation receiver의 기능 상실, installed IFR-certified GPS/GNSS receivers의 GPS 이상, ILS receiver의 전체적/부분적 기능 손실, 또는 공대지 교신 기능의 손실이 발생한 경우. 보고에는 항공기 식별부호, 영향을 받는 장비, IFR로 운영할 수 있는 능력이 손상된 정도, 그리고 ATC에 요청하는 지원의 특성 및 범위가 포함되어야 한다.
9. 비행 안전과 연관된 모든 정보들.
이 외의 장비 또한 IFR 하에서 운영할 수 있는 능력을 손상시킬 수 있다. 이러한 장비(예를 들어 weather radar)의 고장이 안전이나 IFR 능력에 영향을 미친다면 위에서 언급한 대로 보고되어야 한다. GPS 이상을 보고할 경우 이상이 발생한 위치, 고도, 그리고 이상 지속 시간이 포함되어야 한다. 정부 테스트로 인하여 발생하는 의도적인 GPS 간섭이나 중단은 NOTAM을 통해 전파된다. 이러한 중단은 이상이 아니므로 ATC에 보고되어서는 안 된다.
IFR operations에 대한 양방향 무선 교신 두절 절차는 14 CFR Part 91, 91.185에 설명되어 있다. IFR에 따라 비행중인 조종사는 이 규정을 준수해야 한다(단, ATC에 의해 달리 허가된 경우 제외). 교신 두절에 대한 더 넓은 절차는 AIM(Aeronautical Information Manual)에서 확인할 수 있다. 조종사는 squawk code 7600을 통해 ATC에 무선 교신 두절을 알릴 수 있다. [그림 2-69] 송신기만 작동하지 않는 경우에는 모든 수신기(navigation receivers 포함)를 통해 ATC instructions를 청취한다. ATC는 VOR, VORTAC, NDB, 혹은 localizer 주파수를 통해 조종사와 교신을 시도할 수 있다. 또한 조종사는 이전에 할당받았던 주파수를 통해 ATC와 교신하려 시도해야 한다.
교신 두절에 대한 규정의 주된 목적은 ATC system 내 IFR no-radio operations가 길어지는 것을 방지하기 위함이다. 왜냐하면 이러한 운영은 공역 내 다른 사용자들에게 악영향을 미칠 수 있기 때문이다. VFR conditions에서 IFR clearance에 따라 운영하던 도중 교신 두절이 발생한 경우, 혹은 교신 두절 이후 VFR conditions를 마주한 경우 조종사는 VFR conditions 하에 비행을 수행하고 실현 가능한대로 착륙해야 한다. 실현 가능한대로 착륙하라는 조건을 최대한 빨리 착륙하라는 의미로 해석해서는 안 된다. 조종사들은 최선의 판단을 행할 수 있는 특권을 가지고 있다. 따라서 조종사는 인가되지 않은 공항, 혹은 항공기 형식에 적합하지 않은 공항에 착륙하지 않아도 되며 의도하는 목적지에 몇 분 이내로 착륙하지 않아도 된다. 허나 IFR conditions가 만연한다면 항공기 분리를 보장하기 위해 절차를 준수해야 한다. 조종사가 양방향 무선 교신 두절을 맞닥뜨린 후 IFR에 따라 비행해야 한다면 다음 경로들 중 하나를 선택해야 한다:
• 마지막으로 받은 clearance에서 ATC가 할당한 경로.
• 만약 radar vector를 받고 있었다면 교신 두절이 발생한 지점으로부터 radar vector clearance에서 명시된 fix∙route∙airway까지의 direct route.
• 할당받은 경로가 없는 경우 ATC가 further clearance로 예상하라 알려준 경로.
• 이러한 경로들이 모두 없는 경우 비행계획서에 제출한 경로.
양방향 무선 교신이 두절된 경우 특정 고도를 비행하는 것 또한 중요하다. 통신 두절 발생 후 유지해야하는 고도는 14 CFR Part 91, 91.185에서 확인할 수 있다. 비행하는 각 구간에 대하여 다음 고도들 중 가장 높은 고도를 비행해야 한다.
• 마지막으로 받은 clearance에서 ATC가 할당한 altitude/flight level.
• IFR operations를 위한 minimum altitude/flight level.
• ATC가 further clearance로 예상하라 알려준 altitude/flight level.
종종 마지막으로 할당받은 고도나 further clearance 고도가 차후 경로의 MEA만큼 높지 않을 수 있다. 이 경우 조종사는 보통 MEA가 높아지는 fix에 도달하였을 때 더 높은 MEA로 상승한다. 만약 fix에 MCA가 있다면 fix에 도달하였을 때 MCA 이상이도록 상승한다. 만약 차후의 경로가 더 낮은 MEA를 가진다면 MEA가 낮아지는 fix에 도달하였을 때 마지막으로 할당받은 고도나 further clearance 고도로 하강한다.
ARTCC Radio Frequency Outage
ARTCC는 ATC 서비스를 중단 없이 제공하기 위하여 각 주파수에 대해 적어도 하나의 백업 라디오 송수신기를 가진다. 간혹 기술적 문제로 인하여 지연이 발생할 수도 있지만 전환에 60초 이상 걸리는 경우는 거의 없다. 고장이 신속하게 해결되지 않으리라 판단될 경우 ARTCC는 근처 항공기로 하여금 고장이 발생한 주파수를 통해 교신 지침을 방송해 달라 요청한다. 조종사는 ARTCC의 주파수 고장을 판단하기 전에 최소 1분 정도 기다려야 한다. 이러한 고장이 발생한 경우 조종사는 고장이 발생한 주파수를 청취함과 동시에 다음의 권장 교신 절차를 준수해야 한다(단, 업무량과 장비 성능이 허용하는 경우):
1. 주파수를 변경한 후 ARTCC와 양방향 교신이 이루어지지 않을 경우 조종사는 이전 관제사와 다시 교신하여 대체 주파수나 기타 지시를 받아야 한다.
2. 양방향 교신이 이루어진 후 ARTCC 주파수 장애가 발생한 경우 조종사는 다른 ARTCC 주파수(가능하다면 다음 담당 구역의 주파수)와 교신한 다음 지시를 요청해야 한다. 허나 경로 상 다음 주파수 변경이 다른 ATC 시설과 관련된 경우에는 해당 시설과 교신하여 지시를 받아야 한다. 어떤 방법으로도 교신이 다시 이루어지지 않을 경우 조종사는 FSS에 지시를 요청해야 한다.
Note: FSS를 통해 ARTCC의 정보를 받는 것은 회사 주파수를 이용하는 것보다 빠르다. 왜냐하면 FSS는 담당 ARTCC 구역과의 직접 회선을 가지고 있기 때문이다. 따라서 ARTCC 주파수 장애로 인해 FSS나 회사 주파수 중 하나를 선택해야하는 경우 FSS를 사용하는 것이 권장된다.
ATC가 clearance나 instruction을 발부한 경우 조종사는 수신 즉시 이를 이행해야 한다. 종종 ATC는 그들의 요청을 수식하는 단어들을 포함한다. 예를 들어 “immediately”는 긴급함을 강조하기 위해 사용되며 조종사는 안전을 위해 이를 신속히 따라야 한다. 상승 지점이나 시간제한이 추가된다 하여 조종사들로 하여금 비행경로나 ATC clearance 조항들을 벗어날 권한을 부여하지는 않는다. 만약 “climb at pilot’s discretion”을 받은 경우 조종사는 원하는 때에 상승을 시작할 수 있고, 어떠한 상승률도 사용할 수 있으며, 원하는 중간 고도에서 일시적으로 수평을 유지할 수 있다(단, 떠난 고도로 다시 되돌아갈 수 없음). ATC가 이러한 용어를 사용하지 않았거나 상승 제한을 부과하지 않았다면 조종사는 즉시 상승을 수행해야 한다. 할당받은 고도로부터 1,000ft까지는 최적의 상승률로 상승을 수행한다. 이후 할당받은 고도에 도달하기 전까지 500 ~ 1,500fpm의 상승률을 사용한다. 언제든 500fpm의 상승률을 유지할 수 없다면 ATC에 알린다. 상승 도중 중간 고도에서 수평을 유지해야 한다면 ATC에 알린다.
ATC가 “Expedite climb”을 발부한 경우 이는 조종사로 하여금 항공기 조작 특성 변화 없이 대략적인 최대 상승률을 사용해야 함을 나타낸다. 보통 관제사들은 조종사에게 expedite의 이유를 알려준다. afterburner engines를 장착한 터보제트 항공기(예를 들어 군용기)의 경우 만약 en route altitude로 상승 도중 afterburning을 사용하고자 한다면 이륙 전에 ATC에 알려야 한다. 종종 관제사는 고성능 상승을 수용하고 항공기가 제약(“expedite” clearance) 없이 상승하도록 항적을 계획할 수 있다. “expedite”를 발부받은 후 expedite 지시 없이 동일한 고도를 다시 발부받거나, 혹은 다른 고도를 발부받는다면 expedite 지시는 취소된 것이다
en route climb 도중 clearance에 대하여 ATC와 명확하게 소통해야 한다. 다음 예시에서 조종사는 clearance readback/hearback 오류를 경험하여 clearance에 대한 혼란을 겪었고 그 결과 다른 항적과의 불충분한 분리가 발생하였다. “Departing IFR, clearance was to maintain 5,000feet, expect 12,000 in 10 minutes.” Center로 이양된 후 조종사는 “Leaving 5,000 turn left heading 240 for vector on course”라 read back 하였다. 조종사는 5,000ft를 통과하여 상승함과 동시에 할당받은 heading으로 선회하였다. 5,300ft에서 Center는 할당된 고도가 5,000ft라고 조언하였다. 조종사는 즉시 5,000ft로 하강하였다. 이후 Center는 12시 방향, 1마일, 6,000ft에 항적이 있음을 알렸다. 항적이 지나간 후 더 높은 고도가 할당되었고 상승이 재개되었다. 이후 조종사는 clearance가 아마도 “reaching” 5,000이였으리라 생각했다. 심지어 관제사도 “leaving”이라는 readback을 확인하지 못하였다. “Reaching”과 “Leaving”은 흔하게 사용되는 ATC 용어이지만 용도가 다르다. 이러한 용어는 상승, 하강, 선회, 혹은 속도 변화와 관련된 clearances에서 사용될 수 있다. “reaching”과 “leaving”은 조종실에서 매우 비슷하게 들린다.
상승 중 고도를 인지하기 위하여 조종사들은 종종 고도를 call out 한다. pilot monitoring은 할당받은 고도에 도달하기 2,000ft 전에, 그리고 1,000ft 전에 고도를 call out 할 수 있다. 이러한 call out은 “two to go”와 “one to go”가 될 수 있다. transition altitude(QNH)를 통과하여 상승하는 경우 두 조종사는 본인의 고도계를 29.92"Hg로 설정하한 다음 “2992 inches”(혹은 일부 항공기에서는 ‘standard’)와 flight level을 알린다. 예를 들어 “2992 inches”(standard), flight level one eight zero. three pilot crews의 second officer는 두 조종사가 적절한 altimeter setting을 입력했는지를 확인할 수 있다. 국제선 비행의 경우 조종사는 인치 수은 단위의 대기압을 밀리바, 혹은 헥토파스칼과 구분할 수 있어야 한다. 예를 들어 996 밀리바가 2996으로 잘못 설정되는 경우가 있다.
일반적인 IFR 비행의 경우 대부분의 비행시간은 TOC(top of climb)와 TOD(top of descent) 사이의 순항 고도에서 운영된다. 일반적으로 TOD는 FMS를 갖춘 항공기에서 사용된다. 이는 순항 고도에서 처음으로 강하가 시작되는 지점을 나타낸다. 또한 FMS는 연료를 가장 절약할 수 있는 속도로 순항하고, flight plan route를 따라 지속적으로 안내를 제공하며, clearance 변화에 따른 연료 소비량의 평가 및 예측을 제공함으로써 비행을 지원한다.
Aircraft Speed and Altitude
FMS는 en route descent 도중 목적지 공항으로 향하는 fuel saving idle thrust descent를 제공한다. 이는 순항 고도로부터 적절한 MIA까지 중단 없는 하강을 가능하게 해준다(단, 속도 조절을 위해 수평 비행이 필요한 경우 제외). 관제사들은 조종사가 14 CFR Part 91의 지시 속도 제한(250노트)을 준수하기 위해 하강 도중 10,000ft MSL에서 수평을 유지하리라 예상 및 계획한다. 이 외의 때에 수평을 유지하는 것은 ATC의 항적 처리에 심각한 영향을 미칠 수 있다. 조종사는 ATC의 예상 조치들을 이행하기 위하여 모든 노력을 기울여야 한다.
비행기가 레이더 관제를 받는 경우 ATC는 적절한 간격을 위해 속도 조절을 발부한다. ATC는 지시 속도 10노트 단위로 속도 조절을 발부한다(단, FL 240 이상에서는 Mach number 0.01 단위로 발부될 수 있음). 속도 조절을 준수하는 경우 조종사는 해당 속도의 ±10노트(혹은 마하수 0.02) 이내를 유지해야 한다.
clearance 내의 속도 제한과 고도 제한을 조종사가 잘못 해석할 수도 있다. 이는 차트의 지침을 clearance로 간주한 아래의 사례에서 알 수 있다. 항공기는 FL 310에 있으며 VOR에 17,000ft의 ‘expect-crossing altitude’가 설정되어 있었다. altitude alerter가 울린 후 조종사는 Center에 FL 310을 떠남을 알렸다. ATC는 “Roger”라 답신하였다. FL 270에서 Center는 조종사에게 하강 이유를 물었다. 조종사는 관제사에게 VOR을 17,000ft로 통과하기 위함이라 말하였다. ATC는 조종사에게 하강을 위한 clearance가 없음을 알렸다. 조종사가 clearance라 생각한 것은 사실 “expect” clearance였다. 조종사들은 clearance에 대해 의문이 있을 때마다 ATC에 설명을 요청해야 한다. 또한 “Roger”라는 용어는 ATC가 전송을 수신했다는 의미일 뿐 전송을 이해했다는 뜻이 아니다. “Expect” altitudes는 계획 목적을 위해 게재되며 ATC가 직접 발부하기 전까지는 crossing restrictions로 간주되지 않는다.
holding pattern 기준은 장애물 회피와 항공기 분리를 제공하기 위해 개발되었다. holding pattern은 보통 holding fix 이후의 비행경로와 일치되도록 정렬된다. level holding의 경우 최소 1,000ft의 장애물 회피가 primary area에서 제공된다. secondary area의 안쪽 가장자리에서는 500ft의 장애물 회피가 제공되며 바깥쪽 가장자리에서는 0ft가 제공되도록 가늘어진다. 가파른 지형에 대한 허용치가 고려되며 장애물 회피를 위한 특정 고도가 가장 가까운 100ft 단위로 반올림될 수 있다. climb in hold 기준이 적용되는 경우에는 어떤 장애물도 holding surface를 관통하지 않는다. [그림 2-70]
체공 항공기에 영향을 미치는 요인들을 매우 다양하다. 여기에는 바람의 영향, outbound 구간 길이, 최대 체공 속도, fix와 NAVAID 사이의 거리, DME의 경사 거리의 영향, 체공 영역 크기, 그리고 체공 고도 등이 있다.
ATC Holding Instructions
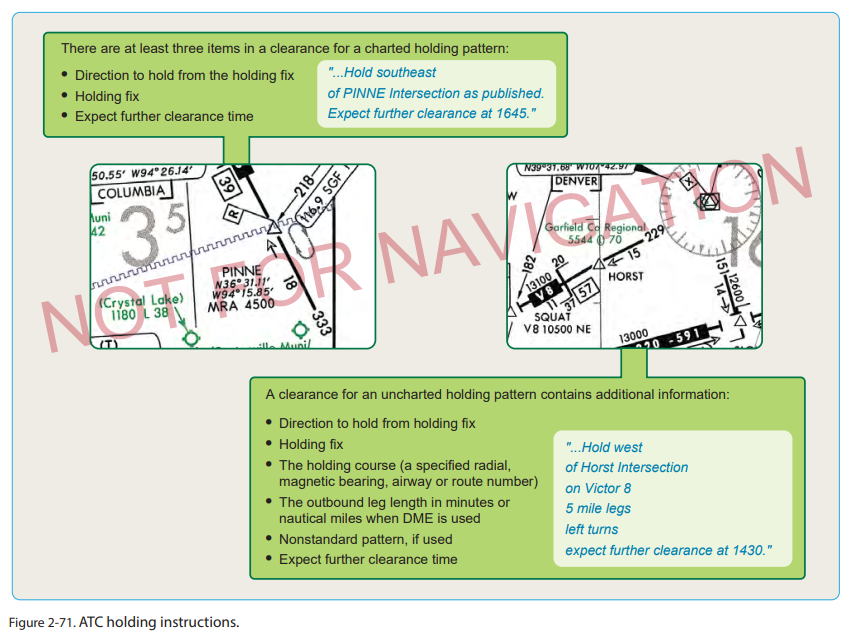
clearance limit이나 fix에서 지연이 예상되는 경우 관제사는 clearance limit이나 fix에서의 ETA로부터 적어도 5분 전에 holding clearance를 발부한다. ATC로부터 할당받은 holding pattern이 적절한 항공 차트에 표시되어 있다면 조종사들은 차트에 표시된 대로 체공을 수행해야 한다.
holding pattern이 차트에 표시되지 않은 fix에서 체공해야 하는 경우 ATC는 완전한 체공 지시를 발부받는다. 체공 지시에는 fix로부터의 방향, fix의 명칭, 경로, 경로의 길이(단, 해당하는 경우), 선회 방향(단, 좌선회가 필요한 경우), 그리고 EFC 시간이 포함된다. holding clearance에 새로운 고도가 특별히 포함되지 않는 한 조종사는 마지막으로 할당받은 고도를 유지해야 한다. 그리고 좌선회가 할당되지 않는 한 우선회를 수행해야 한다. 모든 체공 지시에는 EFC time이 포함되어야 한다. 양방향 교신이 두절된 경우 조종사는 EFC를 통해 특정 시간에 holding fix를 떠날 수 있다. 조종사는 정확한 때에 fix를 떠날 수 있도록 holding pattern의 마지막 바퀴를 계획해야 한다. [그림 2-71]
clearance limit 접근 도중 ATC로부터 체공 지시를 받지 못했다면 조종사는 특정 절차를 따라야 한다. 우선 fix에 도달하기 전에 ATC에 교신하여 further clearance를 요청한다. 만약 further clearance를 얻을 수 없다면 차트에 표시된 holding pattern을 따라 체공을 수행한다. 만약 holding pattern이 차트에 표시되어있지 않다면 inbound course에서 우선회로 체공을 수행한다. 이러한 절차는 ATC가 적절한 분리를 제공하는 것을 보장한다. [그림 2-72] 예를 들어 항공기가 V214에서 동쪽으로 향하고 있으며 Cherrelyn VORTAC이 clearance limit이다. 조종사는 further clearance를 받지 못하였으며 체공 지시를 받지 못했다. 따라서 조종사는 그림과 같이 hold southwest on the 221 radial using left-hand turns를 계획하였다. 만약 holding pattern이 차트에 표시되어있지 않다면 hold west of the VOR on V214 using right-hand turns를 수행한다.
항공기 분리를 위해 필요한 경우 ATC는 특정 reporting point에서 standard holding pattern을 수행하도록 요청할 수 있다. 해당 지점에 minimum holding altitude가 설정되어있지 않다면 MEA나 MRA 중 높은 고도가 지정된다. en route fixes에서의 예상치 못한 체공은 airway나 route의 radials∙bearings∙courses에서 발생할 수 있다. fix가 시설인 경우에는 모든 radial∙bearing에서 예상치 못한 체공이 발생할 수 있으며 만약 standard holding이 MEA나 MRA에서 이루어질 수 없다면 체공 제한 사항이 필요할 수도 있다.
Maximum Holding Speed
holding pattern의 크기는 항공기의 속도에 비례한다. ATC가 보호해야 하는 공역의 양을 한정하기 위해 특정 고도 범위에 대한 maximum holding speeds가 KIAS(knots indicated airspeed)로 지정되었다. [그림 2-73] 그럼에도 불구하고 일부 holding pattern은 추가적인 속도 제한을 갖출 수 있다. 만약 holding pattern이 이처럼 비표준 속도 제한을 갖추고 있다면 해당 정보를 포함하는 아이콘이 차트에 표시된다. 어떠한 이유로든 속도 제한을 초과하여 비행해야 한다면 조종사는 이를 즉시 ATC에 알려야 한다. 또한 조종사는 fix에서의 ETA로부터 3분 이내에 제한 속도로 감속해야 한다. 종종 holding fix로 향하는 도중 감속을 수행함으로써 조종사는 holding pattern을 비행하는 것을 피하거나, 혹은 holding pattern에서 보내는 시간을 줄일 수 있다.
High Performance Holding
고속 운영 도중 준수해야 할 몇 가지 제한사항들이 있다. 예를 들어 bank angle이 30도를 초과하는 경우 항공기는 holding pattern에서 표준율 선회를 수행할 수 없다. 만약 항공기가 flight director system을 사용한다면 bank angle은 25도로 제한된다. 표준율 선회를 위한 bank angle이 30도를 초과하기 위해선 항공기가 210노트(TAS) 이상으로 운영되어야 한다. 따라서 이러한 제한사항은 비교적 빠른 항공기에 적용된다. flight director를 사용하는 항공기가 25도의 bank angle에 도달하기 위해선 170노트(TAS) 이상으로 운영되어야 한다. 이러한 진대기속도는 표준 대기 조건에서의 6,000ft 고도에서 각각 183노트(IAS)와 156노트(IAS)에 해당한다.