1. 레이더는 전파를 공중으로 전송한 후 물체로부터 반사되었을 때 수신하는 방법이다. 그 거리는 전파가 전송된 후 수신 안테나로 다시 돌아오는데 걸리는 시간을 측정하여 결정된다. 물체의 방향은 반사된 전파를 수신하였을 때의 회전 안테나 위치를 통해 결정된다.
2. 보다 신뢰할 수 있는 정비, 그리고 향상된 장비 덕분에 레이더 시스템 고장은 무시할 수 있는 수준으로 감소되었다. 대부분의 시설들은 일부 요소들을 한 쌍으로 갖추고 있다. 하나는 계속 작동 중이며 다른 하나는 기본 요소의 오작동 시 즉시 대체된다.
b. Limitations
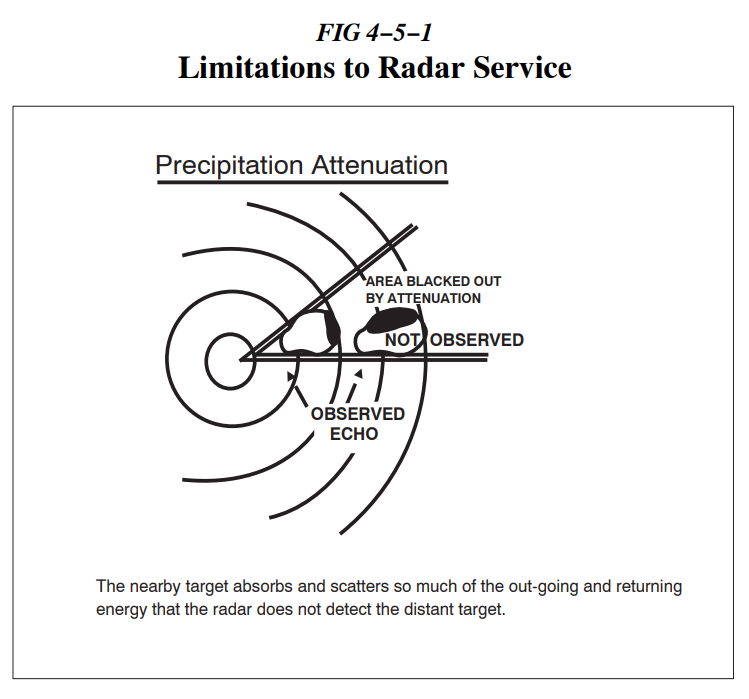
1. 레이더 서비스에는 한계가 있다는 사실을 인지하는 것이 매우 중요하다. 또한 관제사는 그들의 관제 하에 있지 않은 항공기, 그리고 레이더에 잡히지 않는 항공기에 대한 항적 정보를 발부할 수 없을 것이다(그림 4-5-1 참조).
(a) 전파는 보통 연속된 직선으로 이동한다. 단, 다음과 같은 경우는 제외한다:
(1) 비정상 대기 현상(예를 들어 기온 역전)으로 인해 “굴절”되는 경우
(2) 밀도가 높은 물체(예를 들어 짙은 구름, 강수, 지상 장애물, 산, 등등)에 의해 반사, 혹은 감쇠되는 경우
(3) 높은 지형에 의해 가려지는 경우
(b) 전파가 지상으로 굴절된 경우 레이더 화면에 많은 blips가 나타날 수 있다. 전파가 위로 굴절된 경우에는 탐지 범위가 감소할 수 있다. 이상 전파라고도 불리는 이러한 전파 굴절의 영향을 해결하는 것은 어렵다. 그러나 beacon radar를 사용하는 것, 그리고 MTI(moving target indicator)를 통해 정지된/천천히 움직이는 물체를 제거하는 것이 이러한 문제를 해결한다.
(c) 밀도가 높은 물체를 타격하여 반사된 레이더 에너지는 관제사의 스코프에 표시될 것이다. 이는 같은 거리의 항공기를 차단하며 더 먼 거리의 target 표시를 약화시키거나, 혹은 완전히 제거할 수 있다. radar beacon과 MTI는 ground clutter, 그리고 기상 현상을 제거하는데 매우 효과적으로 사용된다. 그리고 레이더 빔을 circularly polarizing 하는 방법은 일부 weather returns를 제거할 것이다. MTI의 취소 신호와 일치하는 속도(tangential, 혹은 “blind” speed)로 비행하는 항공기는 관제사에게 표시되지 않을 수 있다는 점이 MTI의 단점이다.
(d) 비교적 낮은 고도의 항공기가 산에 의해 가려지거나, 혹은 지구 곡률로 인해 레이더 빔 아래에 있다면 레이더에 잡히지 않을 것이다. 이는 일부 지역에 전략적으로 배치된 다수의 레이더를 통해 해결되었다. 다수의 레이더 설치에도 불구하고 실용적이지 못한 일부 지형에서는 ADS-B가 ATC 감시를 제공한다.
(e) 레이더 관제에 영향을 미치는 몇 가지 다른 요인들이 있다. 항공기의 반사 표면의 크기에 따라 radar return의 크기가 결정된다. 따라서 small light airplane, 혹은 sleek jet fighter는 large commercial jet나 military bomber보다 primary radar에서 찾기 어려울 것이다. 따라서 트랜스폰더나 ADS-B의 사용이 매우 유용하다. 모든 FAA ATC 시설들은 관제사에게 automatically reported altitude 정보를 표시한다(단, 항공기가 적절한 장비를 갖춘 경우).
(f) ATC en route 내 일부 위치에서는 secondary-radar-only(no primary radar) gap filler radar systems가 사용된다. 이는 두 개의 커다란 레이더 시스템(이들은 primary radar와 secondary radar를 둘 다 제공) 사이에서 저고도 레이더 범위를 제공하기 위함이다. ADS-B도 이와 동일한 역할을 수행하여 primary radar와 secondary radar를 보완한다. secondary radar only나 ADS-B로 서비스되는 지리적 영역의 경우 transponder, 혹은 ADS-B를 갖추지 않은 항공기는 레이더 서비스를 받을 수 없다. 또한 항공기는 primary targets에 관한, 그리고 ATC radar-derived weather에 관한 레이더 조언을 제공받을 수 없다.
REFERENCE-
Pilot/Controller Glossary Term – Radar.
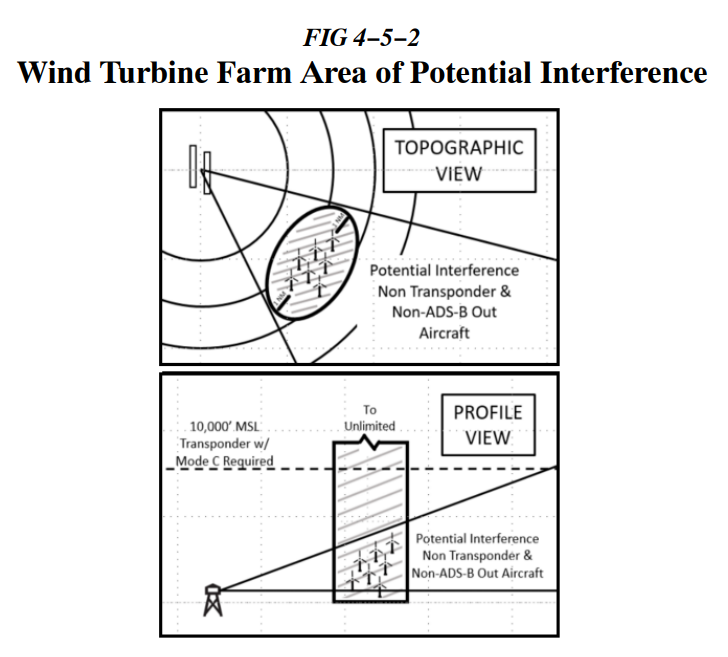
(g) 풍력 터빈은 일반적으로 transponder/ADS-B Out 항공기의 air traffic surveillance radar returns 품질에 영향을 미치지 않는다. 간섭 문제는 search radar와 Non-Transponder/Non-ADS-B Out 항공기에 적용된다.
NOTE-
일반적으로 하나, 혹은 두 개의 풍력 터빈은 상당한 레이더 수신 손실로 이어지지 않는다. 허나 세 개 이상의 풍력 터빈으로 구성되는 wind turbine farm은 search radar의 결과물에 부정적인 영향을 미친다.
(1) wind turbine farm에서의 탐지 손실은 매우 상당하다. 극단적인 경우 이러한 탐지 손실은 터빈으로부터 1.0NM까지, 그리고 wind turbine farm으로부터 모든 고도까지 연장될 수 있다. (그림 4-5-2 참조.)
NOTE-
모든 항공기는 14 CFR §91.119(c)를 준수해야 한다(“...aircraft may not be operated closer than 500 feet to any person, vessel, vehicle, or structure”).
(2) 간섭을 피하기 위해 Non-Transponder/Non-ADS-B Out 항공기는 고도에 상관없이 wind turbine farms로부터 1.0NM 이내를 피해야 한다.
(3) wind turbine farms에서 search-only targets의 탐지 손실이 발생한 경우 dropped track과 erroneous track이 발생하여 분리가 상실될 수 있다. 때문에 Non-Transponder/Non-ADS-B Out 항공기는 hemispheric rule에 따라 적절한 VFR 고도를 운영해야 하며 see-and-avoid를 활용해야 한다.
(4) wind turbine farms 근처에서는 ATC가 Non-Transponder/Non-ADS-B Out 항공기와의 분리를 제공할 수 없다는 것을 조종사는 인지해야 한다. 이러한 non-equipped aircraft가 레이더와 TIS-B(Traffic Information Services-Broadcast)에 표시되지 않을 수 있으므로 see-and-avoid는 조종사의 책임이다.
(h) 미확인 항공기가 레이더에 잡히지 않는 경우, 비행 계획서 정보가 없는 경우, 혹은 항적의 양과 업무량이 항적 정보를 발부할 수 없게 만드는 경우 관제사는 조종사에게 다른 항적과의 근접 조언을 제공하지 못할 수도 있다. 관제사의 최우선 업무는 IFR 항공기들 간의 수직, 가로, 혹은 세로 분리를 설정하는 것이다.
c. FAA radar는 Chart Supplement U.S.에 표시된 위치에서 계속 작동한다. 이러한 레이더의 서비스는 모든 조종사들이 이용 가능하다. guard frequency를 통해 관련 FAA control tower나 ARTCC와 교신하여 지시를 받는다. 비상 상황인 경우에는 아무 FAA 시설과 교신하여 가장 가까운 레이더 서비스에 대한 정보를 받는다.
4-5-2. Air Traffic Control Radar Beacon System(ATCRBS)
a. ATCRBS(secondary surveillance radar라고도 불림)는 세 가지 주요 요소들로 구성된다:
1. Interrogator. primary radar는 안테나에서 전송된 신호, 그리고 물체(예를 들어 항공기)로부터 반사된 이 신호를 필요로 한다. 이러한 반사 신호는 관제사의 레이더스코프에 “target”으로 표시된다. ATCRBS의 경우 Interrogator(ground based radar beacon transmitter-receiver)가 primary radar와 동기화되어 스캔을 수행한다. 그리고 discrete radio signals를 전송하여 모든 트랜스폰더로부터 응답을 반복적으로 요청한다. 이러한 응답은 트랜스폰더의 모드에 따라 달라진다. 수신된 응답은 primary returns와 혼합되어 동일한 레이더스코프 상에 표시된다.
2. Transponder. 이 airborne radar beacon transmitter-receiver는 interrogator의 신호를 자동으로 수신한다. 그리고 트랜스폰더 모드가 수신한 질문에만 특정 pulse group(code)을 통해 선택적으로 응답한다. 이러한 응답은 primary radar return과는 별개이며 primary radar return보다 훨씬 강하다.
3. Radarscope. 관제사가 사용하는 레이더스코프는 primary radar와 ATCRBS의 returns를 모두 표시한다. 이러한 returns를 targets라 부른다. 이를 통해 관제사는 항적을 관제 및 분리한다.
b. primary radar targets를 식별 및 유지하는 것은 관제사에게 있어 지루한 작업이다. primary radar에 비한 ATCRBS의 장점은 다음과 같다:
1. radar targets의 강화.
2. 빠른 target 식별.
3. 특정 코드를 고유하게 표시.
c. ATCRBS 지상 장비의 일부는 decoder이다. 이 장비를 통해 관제사는 각 항공기에 별개의 transponder codes를 할당할 수 있다. 일반적으로 전체 비행기에 하나의 코드만이 할당된다. 코드는 National Beacon Code Allocation Plan에 따라 ARTCC computer에 의해 할당된다. 또한 이 장비는 항공기로부터 Mode C altitude information을 수신하도록 설계되었다.
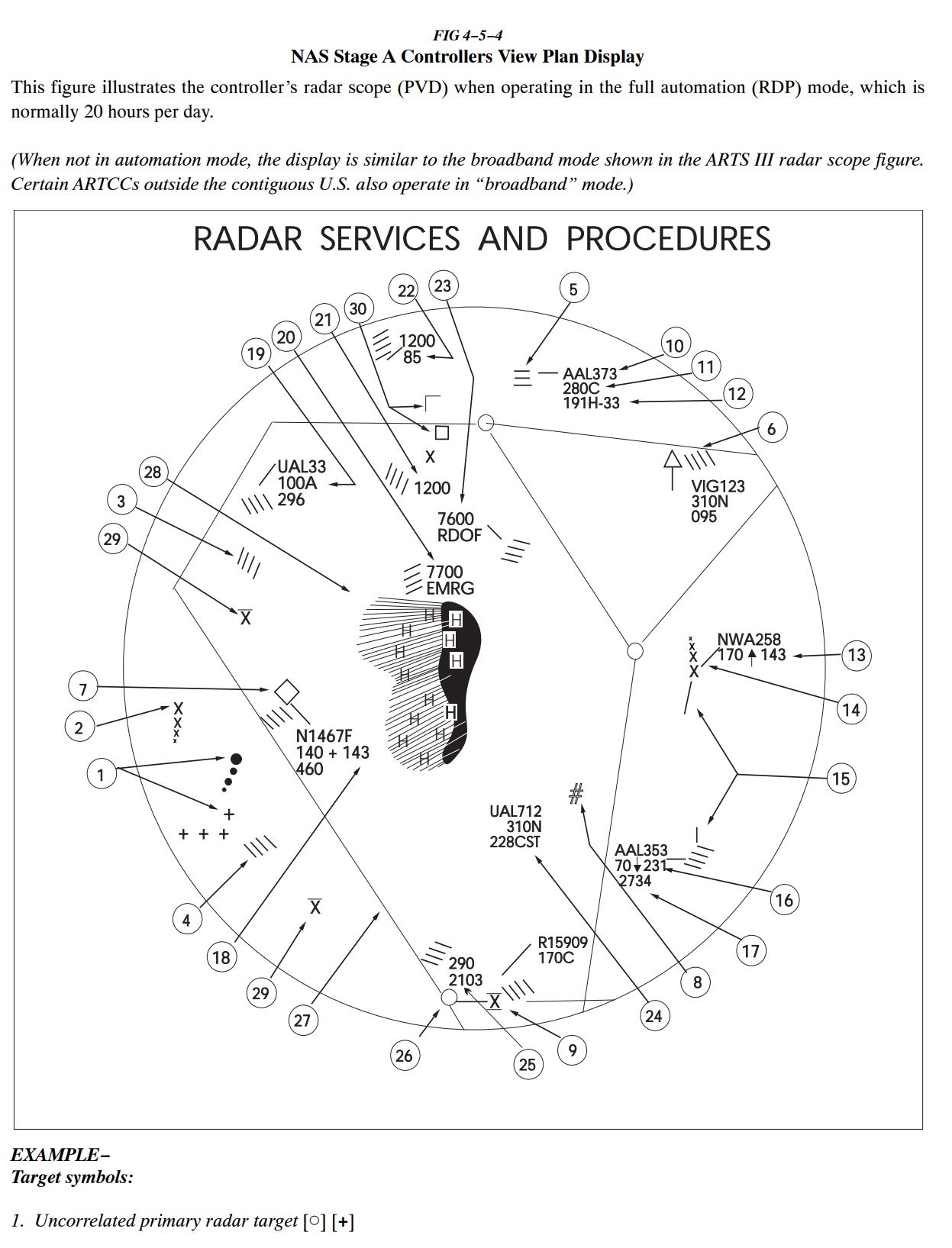
NOTE-
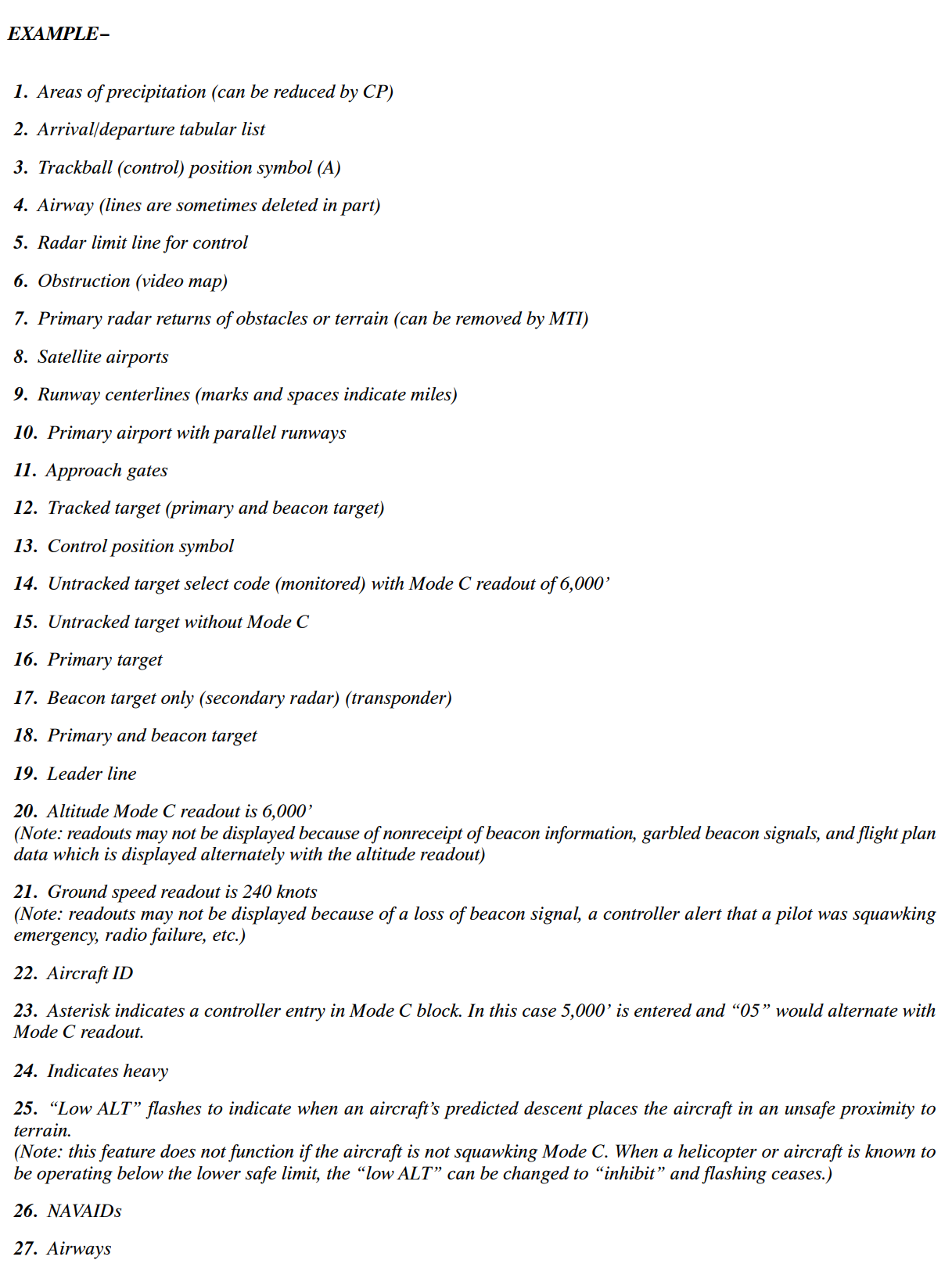
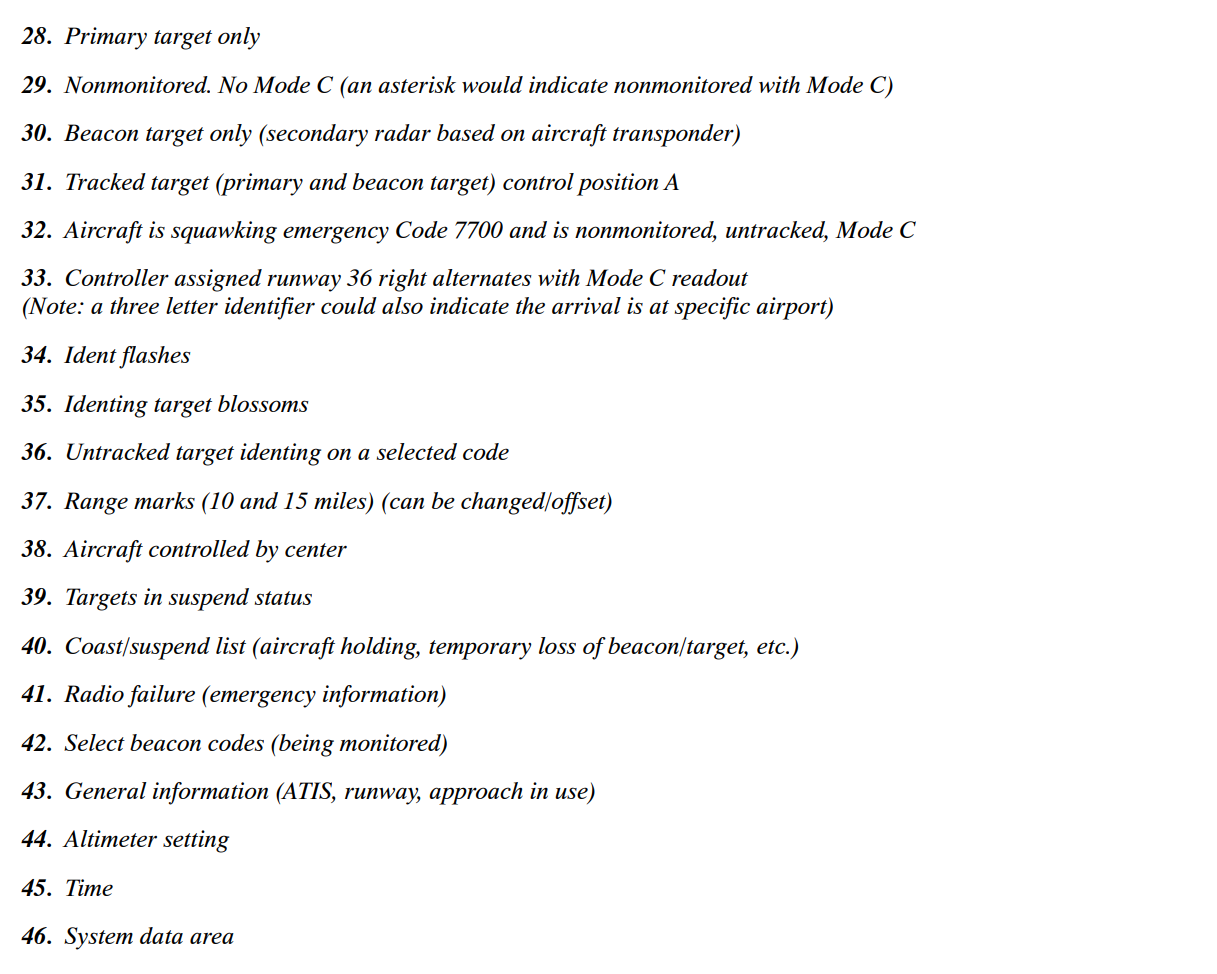
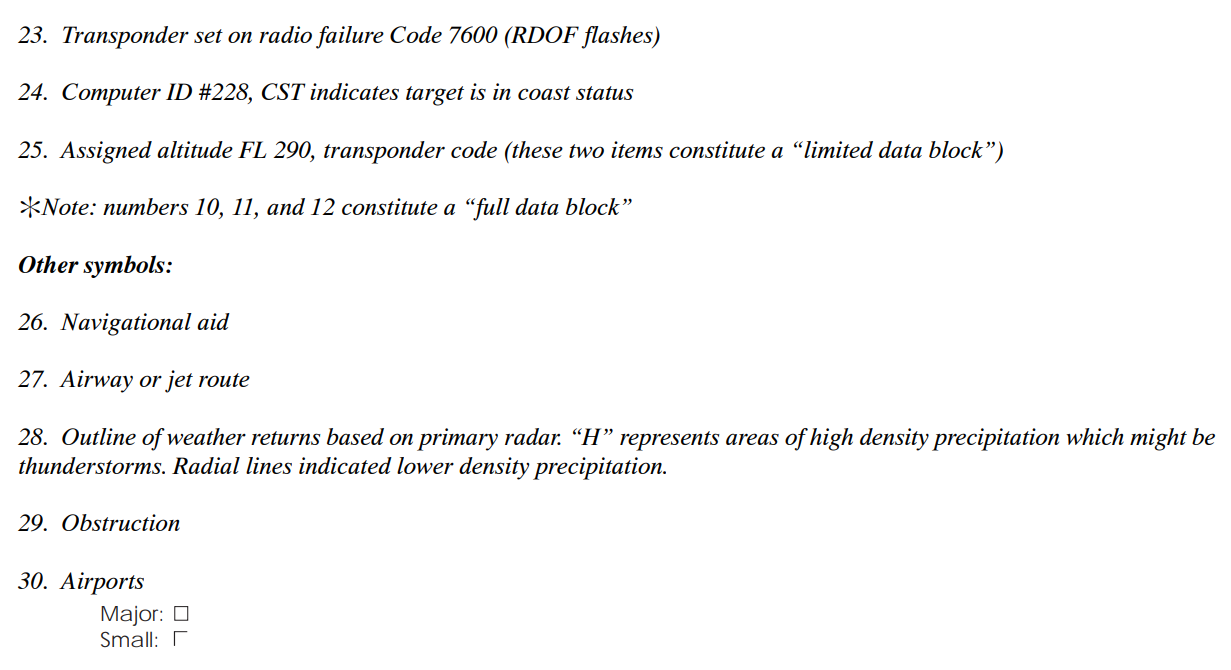
NAS Stage A(en route), ARTS III(terminal) Systems, 그리고 그 외 nonautomated(broadband) radar systems의 레이더스코프에 표시되는 target 기호에 대한 설명을 위해 다음 그림을 참고한다(그림 4-5-3 및 4-5-4).
d. 항공기의 트랜스폰더는 레이더 시스템의 효율성을 크게 향상시킨다는 점이 강조되어야 한다.
REFERENCE-
AIM, Para 4-1-20, Transponder and ADS-B Out Operation.
NOTE-
다수의 radar terminals에는 ARTS 장비가 없다. 이러한 시설들, 그리고 contiguous U.S. 외부의 특정 ARTCC들은 우측 하단과 유사한 레이더 화면이 있을 것이다. ARTS 시설과 NAS Stage A ARTCC가 nonautomation mode로 운영 중인 경우에도 이와 유사한 레이더 화면이 있을 것이며 automation에 기반을 두는 특정 서비스를 사용하지 못할 수도 있다.
a. PAR은 항공기 sequencing과 spacing을 위한 보조 기구가 아닌 착륙을 위한 보조 기구이다. PAR은 기본 착륙 보조 기구로 사용되거나(추가적인 정보를 위해 Chapter 5, Air Traffic Procedures 참조), 혹은 그 외의 접근을 모니터링 하는데 사용될 수 있다. 이는 거리, 방위각, 그리고 고도 정보를 표시하도록 설계되었다.
b. PAR array는 두 개의 안테나를 사용한다. 하나는 수직면을 스캐닝하고 다른 하나는 수평면을 스캐닝 한다. 거리는 10마일로, 방위각은 20도로, 고도는 7도로 제한되므로 오직 final approach area만 다루어진다. PAR 레이더스코프는 두 부분으로 나뉜다. 윗부분은 고도와 거리 정보를 나타내며 아랫부분은 방위각과 거리 정보를 나타낸다.
a. ASDE-X/ASSC는 multi-sensor surface surveillance system이다. 이는 모든 기상/시정 조건에서 공항 활주로/유도로에 위치한 항공기/차량(움직이는 것과 움직이지 않는 것 모두 포함)에 대한 감시 정보를 제공하는 시스템이다. 이 시스템은 다음으로 구성된다:
1. A Primary Radar System. ASDE-X/ASSC 시스템은 공항 표면으로부터 200ft 높이의 공역까지 다룬다. Primary Radar antenna는 일반적으로 공항의 관제탑, 혹은 그 외 전략적 중요한 장소에 위치한다. 이는 transponder나 ADS-B를 갖추지 않은 항공기, 혹은 transponder나ADS-B가 고장 난 항공기를 탐지 및 표시할 수 있다.
2. Interfaces. ASDE-X/ASSC는 식별부호를 위해 자동화 인터페이스를 갖춘다. 그리고 이는 위치 정보를 위해 terminal radar와 인터페이스로 접속된다.
3. Automation. Multi-sensor Data Processor(MSDP)는 모든 센서의 보고들을 하나의 target으로 결합하여 관제사에게 표시한다.
4. Air Traffic Control Tower Display. tower cab에 위치한 고해상도의 컬러 모니터는 공항 표면의 운영 상황을 관제사에게 나타낸다.
(ATP: ASDE-X를 갖춘 공항의 지상 이동 시 트랜스폰더는 altitude reporting을 계속 전송하여야 한다.)
b. 여러 센서에서 수집된 정보들을 결합함으로써 항공기 위치에 대한 가장 정확한 정보가 타워에 제공된다. 이를 통해 표면의 안전성과 효율성이 향상된다.
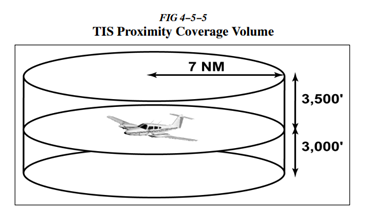
Traffic Information Service(TIS)는 데이터 링크를 통해 조종실에 정보를 제공한다. 이는 일반적으로 음성 라디오를 통해 수신하는 VFR radar traffic advisories와 유사하다. TIS는 “see and avoid”의 안전성과 효율성을 향상시키기 위한 것이다. 이는 조종사에게 근처 항적과 잠재적 충돌 상황을 알려주는 automatic display를 통해 이루어진다. 이러한 화면은 다른 항적들의 육안 확인을 돕기 위한 것이다. TIS는 terminal Mode S radar system의 향상된 기능을 사용한다. 이 시스템은 감시 정보, 그리고 이러한 정보를 적절한 항공기(TIS “client”라고도 불림)에게 “업링크” 하는데 필요한 data link를 포함한다. TIS는 client aircraft로부터 수직 +3,500ft 및 –3,000ft, 그리고 수평 7NM 범위 내 최대 8대의 intruded aircraft에 대해 예상 위치, 고도, altitude trend, ground track 정보를 제공한다(그림 4-5-5, TIS Proximity Coverage Volume 참조). 7NM 이상의 거리에서 target이 보고될 경우 이 target이 34초 이내에 threat가 될 것임을 나타낼 뿐 정확한 거리는 표시하지 않는다. 거리나 고도에 상관없이 충돌 가능성으로부터 34초 이내일 것으로 추정되는 항공기(단, Mode S radar의 감시 하에 있는 항공기)가 있다면 TIS는 이를 조종사에게 경고한다. TIS 감시 정보는 ATC가 사용하는 레이더와 동일한 것으로부터 도출된다. 이러한 데이터는 각 레이더 스캔마다(명목상 5초 마다) client aircraft에 업링크 된다.
b. Requirements.
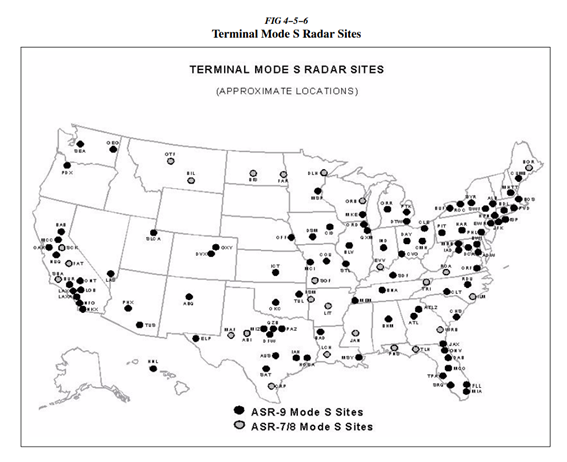
1. TIS를 사용하기 위해서는 client와 intruder가 적절한 조종실 장비를 갖추어야 한다. 그리고 이들은 TIS를 제공할 수 있는 Mode S 레이더의 범위 내를 비행해야 한다. 일반적으로 이는 그림 4-5-6, Terminal Mode S Radar Sites에 표시된 지점으로부터 55NM 이내일 것이다. TIS 수신을 위해 ATC와의 교신이 필요하지는 않다. 허나 특정 공역이나 비행 운영에 의해 요구될 수도 있다.
2. 이러한 서비스를 받기 위해 TIS client aircraft에 필요한 장비들은 다음과 같이 구성된다(그림 4-5-7 참조):
(a) altitude encoder를 갖춘 Mode S data link transponder.
(b) TIS 소프트웨어가 설치된 Data link application processor.
(c) Control-display unit.
(d) 옵션 장비로는 digital heading source가 있다. 이는 “crab angle”과 선회 기동으로 인한 디스플레이 오류를 수정하기 위한 것이다.
NOTE-
위의 기능 중 일부는 일체형 항전 장비로 결합될 가능성이 높다(예를 들어 (a)와 (b)).
3. TIS가 작동하기 위해선 intruder aircraft가 트랜스폰더(Mode A, C 혹은 S)를 가지고 있어야 한다. TIS가 intruder aircraft에 대해 제공하는 모든 고도 정보는 Mode C 보고로부터 도출된다(단, 적절한 장비를 갖춘 경우).
4. TIS는 초반에 ASR-9 digital primary radars와 짝을 이루는 terminal Mode S systems에 의해 제공될 것이다. 이러한 시스템은 항적이 많은 지역에 위치하므로 초기에 아주 큰 이점을 제공할 것이다. ASR-7이나 ASR-8 analog primary radar와 짝을 이루는 나머지 terminal Mode S sensors는 이러한 radar sites의 변경, 혹은 재배치가 이루어지기 전까지 TIS를 제공할 것이다. radar sites 위치를 위해 그림 4-5-6, Terminal Mode S Radar Sites를 참조한다. TIS는 부가 정보 서비스이므로 꼭 필요한 것은 아니다. 따라서 각 radar sites의 상태를 제공하는 메커니즘(예를 들어 NOTAM)은 없다.
FAA는 12초마다 한 번씩 회전하는 en route Mode S radars(그림에는 표시되지 않음)를 운영한다. 이러한 radar sites에서 TIS가 구현되기 위해선 TIS의 추가 개발이 필요하다. 현재 en route Mode S radars에서 TIS를 구현할 계획은 없다.
c. Capabilities.
1. TIS는 Mode S data link를 통해 client aircraft에게 지상 기반 감시 정보를 제공한다. 이는 근접 항공기의 육안 확인을 돕기 위함이다. 각 장치들의 실제 기능은 서로 다르므로 TIS를 사용하기 전에 보충 안내서를 참조해야 한다. 최대 8대의 intruder aircraft가 표시될 수 있다. 만약 9대 이상의 항적이 intruder parameters와 일치할 경우 8대의 “most significant” intruders가 업링크 된다. 이러한 “most significant” intruders는 일반적으로 TIS client에 가장 근접한 항적들 및/혹은 위협이 되는 항적들이다.
2. TIS는 Mode S ground sensor를 통해 각 intruder에 대한 다음 정보를 제공한다:
(a) 6도 단위의 상대 방위(relative bearing) 정보.
(b) 1/8NM ~ 1NM 단위(scale에 따라 달라짐)의 상대 거리(relative range) 정보.
(c) 100ft 단위의 상대 고도(1,000ft 이내), 혹은 500ft 단위의 상대 고도(1,000 ~ 3,500ft). 단, intruder aircraft가 altitude reporting 기능을 갖춘 경우.
(d) 45도 단위의 예상 ground track.
(e) altitude trend data(500fpm 이하일 경우 수평으로 표시되며 500fpm을 초과할 시 상승/하강 지시). 단, intruder aircraft가 altitude reporting 기능을 갖춘 경우.
(f) intruder의 우선순위는 “traffic advisory” intruder, 혹은 “proximate intruder” intruder 중 하나이다.
3. 하나의 Mode S sensor 감시 범위에서 다른 Mode S sensor 감시 범위로 비행할 경우 항전 시스템이 자동으로 TIS를 전환한다. 때문에 이는 조종사의 조치를 필요로 하지 않는다.
4. 조종사에게 높은 우선순위 intruders를, 그리고 data link system 상태를 알리기 위해 공중 시스템이나 지상 장비가 제공하는 다양한 상태 메시지가 있다. 이러한 메시지는 다음을 포함한다:
(a) Alert. 34초 이내의 잠재적 충돌 위험을 식별한다. 이러한 경고는 시각적 및/혹은 청각적일 수 있다(예를 들어 점멸하는 화면 기호, 혹은 헤드셋 신호음). 수직 및 수평 좌표로부터의 가장 가까운 접근로가 30초 미만인 경우, 그리고 가장 가까운 접근로가 수직 500ft 및 수평 0.5NM 이내일 것으로 예상되는 경우 target은 threat가 된다.
(b) TIS traffic. TIS 항적 정보가 표시된다.
(c) Coasting. TIS display가 6초 이상 경과하였다. 이는 지상 시스템으로부터 업링크가 누락되었음을 나타낸다. TIS display가 12초를 경과할 경우 “No Traffic” 상태가 표시된다.
(d) No Traffic. proximate 기준이나 alert 기준을 충족하는 intruder가 없다. 이러한 상태는 TIS 시스템이 완전히 작동하고 있음을 나타낼 수도 있고, 혹은 12 ~ 59초 사이의 “coasting”을 나타낼 수도 있다(위의 (c) 참조).
(e) TIS Unavailable. 조종사가 TIS를 요청하였지만 이용 가능한 지상 시스템이 없다. 이 상태는 TIS 업링크가 60초 이상 누락 된 경우에도 표시된다.
항전 장비 제조업체에 따라 이러한 메시지 중 일부는 조종사가 직접 사용하지 못할 수도 있다.
5. 항전 시스템 설계에 따라 TIS는 텍스트 및/혹은 그래픽을 포함하는 서로 다른 화면들로 제공될 수 있다. 또한 음성 알림이 단독적으로 사용되거나, 혹은 visual display와 결합되어 사용될 수 있다. 그림 4-5-7, Traffic Information Service(TIS), Avionic Block Diagram은 Traffic Alert and Collision Avoidance System(TCAS. 이는 미국 내 대부분의 passenger air carrier/commuter aircraft에 설치됨)와 유사한 기호를 사용하는 TIS display의 예시를 보여준다. 중앙의 작은 기호는 client aircraft를 나타낸다. 그리고 화면은 12시 방향을 맨 위쪽으로 하여 “track up”으로 맞춰진다. range rings는 2NM과 5NM을 나타낸다. 각 intruder는 client aircraft로부터의 대략적인 상대 방위 및 상대 거리에 위치한 기호로 표시된다. 중앙 근처의 원 모양 기호는 “alert” intruder를 나타내고 다이아몬드 모양 기호는 “proximate” intruder를 나타낸다.
6. 그림 4-5-7, Traffic Information Service(TIS), Avionics Block Diagram의 오른쪽 아래에 있는 삽화는 TIS data block display를 나타낸다. data block에는 다음 정보가 포함되어 있다:
(a) 대략 4시 방향 3마일에 위치한 intruder는 “proximate” aircraft이다. 이는 현재 client aircraft에 대한 collision threat가 아니다. 예시에 사용된 다이아몬드 기호가 이를 나타낸다.
(b) intruder의 ground track이 client aircraft로부터 오른쪽으로 벗어난다. 작은 화살표가 이를 나타낸다.
(c) intruder는 client aircraft보다 700ft 아래에 있다. 기호 아래에 위치한 “-07”이 이를 나타낸다.
(d) intruder가 500fpm을 초과하여 하강하고 있다. “-07” 옆에 있는 downward arrow가 이를 나타낸다. altitude 태그가 있으나 이러한 화살표는 없다면 intruder는 수평을 유지함을, 혹은 500fpm 이하로 상승/하강함을 나타낸다.
NOTE-
만약 intruder에 altitude encoder(Mode C)가 없다면 altitude 태그와 altitude trend 태그가 생략될 것이다.
d. Limitations.
1. TIS는 충돌 회피 시스템으로 사용되기 위한 것이 아니며 다른 항적을 “see and avoid”하는 조종사의 책임을 줄이지 않는다(Paragraph 5-5-8, See and Avoid 참조). IMC 도중, 혹은 intruder aircraft의 육안 확인이 되지 않는 그 외의 상황 도중 회피 기동을 위해 TIS를 사용해서는 안 된다. TIS는 VMC 도중 다른 항적의 육안 확인을 돕기 위한 것이다. TIS intruder display나 TIS alert는 회피 기동을 제공하지도 인가하지도 않는다.
2. TIS는 항적의 육안 확인에 유용한 보조 수단이다. 허나 이를 올바르게 사용하기 위해 충분히 이해해야 하는 몇 가지 시스템 한계가 있다. 이러한 한계들 중 많은 것이 secondary radar surveillance에 내재한다. 즉, TIS가 제공하는 정보는 ATC가 제공하는 정보보다 나을 것이 없다. 그 외의 한계 및 변수는 TIS predictive algorithm과 연관되어 있다.
(a) Intruder Display Limitations. TIS는 트랜스폰더가 설치된 항공기만을 나타낸다. TIS는 Mode S radar의 감시에 의존한다. 이러한 레이더는 paragraph 4-5-2에서 설명한 ATCRBS와 유사한 “secondary surveillance” radar이다.
(b) TIS Client Altitude Reporting Requirement. TIS client aircraft가 TIS를 수신하기 위해선 altitude reporting이 필요하다. altitude encoder가 작동하지 않거나 비활성화 된 경우 TIS request가 지상 시스템으로부터 처리되지 않으므로 TIS를 이용할 수 없다. 따라서 TIS는 Proximity Coverage Volume을 결정하기 위해 altitude reporting을 필요로 한다(그림 4-5-5 참조). TIS 사용자는 altitude encoder의 오작동을 경계해야 한다. 왜냐하면 TIS는 client altitude reporting의 정확도 여부를 확인하는 매커니즘을 갖추지 않기 때문이다. 이러한 기능이 고장 날 경우 잘못된, 그리고 예측 불가능한 TIS 작동이 발생할 것이다. 이러한 고장이 의심될 경우 ATC를 통해 altitude reporting을 확인하는 것이 좋다.
(c) Intruder Altitude Reporting. altitude reporting 기능이 없는 intruder는 altitude tag 없이 표시된다. nonaltitude reporting intruders는 TIS client와 같은 고도에 있는 것으로 가정된다. 이는 alert 계산을 위해서이다. 덕분에 조종사는 레이더 범위 내 모든 항적에 대해 경보를 받도록 보장된다. 허나 실제 고도 차이는 상당할 수 있다. 따라서 이 경우에는 육안 확인이 어려울 수 있다.
(d) Coverage Limitations. TIS는 ground-based, secondary surveillance radar로부터 제공된다. 때문에 TIS는 해당 레이더의 모든 한계를 적용받는다. 항공기가 레이더에 탐지되지 않았다면 그 항공기는 TIS에 표시될 수 없다. 이러한 한계의 예시는 다음과 같다:
(1) TIS는 일반적으로 그림 4-5-6, Terminal Mode S Radar Sites에 표시된 레이더로부터 55NM 이내에 제공된다. 이러한 최대 거리는 radar site마다 다를 수 있으며 항상 “가시선”의 제한을 받는다. 즉, 레이더 신호와 데이터 링크 신호는 장애물, 지형, 그리고 지구의 곡률에 의해 차단된다.
(2) 저고도에서는 TIS를 사용할 수 없을 것이다(특히 산악 지역). 또한 특정 지역에서 레이더 범위의 “floor” 근처를 비행할 경우 TIS는 client aircraft 아래의 intruder를 탐지하지 못할 수도 있다.
(3) radar site 직상공을 비행할 경우 TIS가 일시적으로 중단된다(단, 서비스를 제공하는 인접 radar site가 있는 경우 제외). 지상 레이더는 VOR이나 NDB와 유사하여 zenith cone(때때로 cone of confusion이나 cone of silence라 불림)을 가진다. 이는 station 직상공의 area of ambiguity로 bearing 정보를 신뢰할 수 없는 영역이다. TIS의 zenith cone은 34도이다: 레이더 수평선으로부터 34도 이상에 위치한 항공기는 TIS 수신을 상실할 것이다. 다수의 레이더가 있는 지역의 경우 항공기는 서비스를 상실하지 않을 수 있다. 왜냐하면 인접한 레이더가 TIS를 제공할 것이기 때문이다. 만약 TIS-capable radar를 사용할 수 없다면 “Good-bye” 메시지가 수신된다. 그리고 TIS 범위 내로 되돌아가기 전까지는 TIS가 종료된다.
(e) Intermittent Operations. 선회, 혹은 다른 기동 도중 TIS가 때때로 중단될 수 있다(특히 트랜스폰더 시스템이 antenna diversity(항공기의 상단과 하단에 안테나가 장착)를 포함하지 않는 경우). 위의 (d)와 같이 TIS는 항공기와 Mode S 레이더 사이의 양방향 “가시선” 통신에 의존한다. client aircraft의 구조물이 트랜스폰더 안테나(보통 항공기 하단에 위치)와 지상 레이더 안테나 사이에 놓일 때마다 신호가 일시적으로 중단될 수 있다.
(f) TIS Predictive Algorithm. TIS는 업링크가 발생한 스캔 이전의 스캔 정보를 받는다. 따라서 감시 정보는 대략 5초가 경과한 것이다. intruder의 실시간 위치를 표시하기 위해 TIS는 tracking software의 “predictive algorithm”을 사용한다. 이러한 알고리즘은 intruders의 예상 위치를 추정하기 위해 track history data를 사용한다. 때때로 항공기 기동으로 인해 TIS display에 오류가 발생할 수 있다. 이러한 오류는 주로 relative bearing에 영향을 미친다. 즉, intruder의 거리 및 고도는 비교적 정확하게 유지되므로 “see and avoid”를 하는데 도움이 될 수 있다. 이러한 오류의 일반적인 예는 다음과 같다:
(1) client aircraft나 intruder aircraft가 과도하게, 혹은 갑작스럽게 기동할 경우 기동을 수행한 항공기가 안정되기 전까지는 tracking algorithm이 잘못된 수평 위치를 보고한다.
(2) 빠르게 다가오는 intruder가 client를 얕은 각도로 교차하는 경로에 있는 경우(추월 상황, 혹은 정면충돌 상황), 그리고 두 항공기 중 하나가 1/4NM 이내에서 갑자기 경로를 변경할 경우 TIS는 intruder를 실제 방향의 반대편에 표시한다.
이러한 현상은 비교적 드물다. 경로가 안정된 후 이는 몇 번의 레이더 스캔을 통해 수정된다.
(g) Heading/Course Reference. 모든 TIS 장치가 heading reference information을 가지지는 않는다. 이것을 갖춘 경우 course reference가 Mode S radar에 의해 제공된다. 레이더는 client aircraft의 ground track 정보를 결정하긴 하지만 heading을 나타내지는 않는다. 이러한 장치에서는 모든 intruder의 bearing information이 ground track을 기준으로 하며 바람 수정을 적용하지는 않는다. 경로가 변경된 항공기의 경로를 결정하기 위해선 ground-based radar가 몇 번의 스캔을 수행해야 하므로 intruder aircraft bearing에 지연이 발생할 것이다. 위의 (f)에서와 마찬가지로 intruder의 거리와 고도는 여전히 사용할 수 있다.
(h) Closely-Spaced Intruder Errors. Mode S sensor로부터 30NM 너머인 경우 TIS client의 3/8NM 내에 있는 모든 intruder는 client aircraft와 동일한 위치에 나타난다. 이러한 기능이 없으면 TIS는 조종사를 혼란스럽게 하는 방식으로 intruder를 표시할 수 있다(예를 들어 client의 우측에 있는 closely-spaced intruder가 TIS display에서는 좌측에 표시될 수 있음). 레이더로부터 멀 경우 TIS는 client와 근접한 intruder aircraft의 상대 방위/상대 거리 정보를 정확하게 결정할 수 없다.
TIS는 감시 정보를 위해 ground-based, rotating radar를 사용하므로 TIS 정보의 정확도는 센서(레이더)와의 거리에 따라 달라진다. 이는 ground-based navigational aids(예를 들어 VOR)에서 경험하는 것과 거의 같은 현상이다. 레이더로부터의 거리가 늘어날수록 감시의 정확도는 떨어진다. TIS는 Mode S 레이더로부터의 거리를 조종사에게 알리지 않으므로 client aircraft와 같은 위치에 나타난 intruder는 어느 방향으로든 최대 3/8NM 떨어져 있을 수 있다 추정해야 한다. alert 발생 시 레이더로부터의 거리에 상관없이 외부 육안 스캔, intruder 확인, 그리고 외부 참조를 기반으로 하는 항적 회피가 이루어져야 한다.
e. Reports of TIS Malfunctions.
1. TIS 사용자는 TIS의 바람직하지 못한 성능에 대해 보고함으로써 장치의 오작동을 수정하는데 도움을 줄 수 있다. 보고자는 관찰 시간, 위치, 항공기의 형식 및 식별부호를 명시한 다음 TIS의 상태를 설명해야 한다. transponder processor의 형식, 그리고 사용 중인 소프트웨어를 명시하는 것 또한 유용한 정보가 될 수 있다. TIS 성능은 ATC가 아닌 정비직원에 의해 모니터링 되므로 가장 가까운 FSS(Flight Service Station) 시설에 무선이나 전화로 보고하는 것이 좋다.
NOTE-
TIS는 그림 4-5-6에 묘사된 terminal Mode S radar sites에서만 작동한다. TIS는 TIS-B(Traffic Information Service-Broadcast)와 어떤 면에서는 유사하긴 하나 관련은 없다.
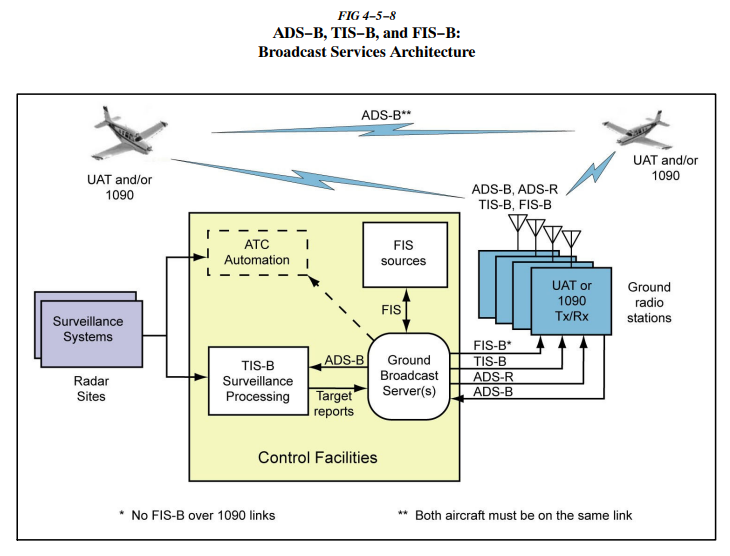
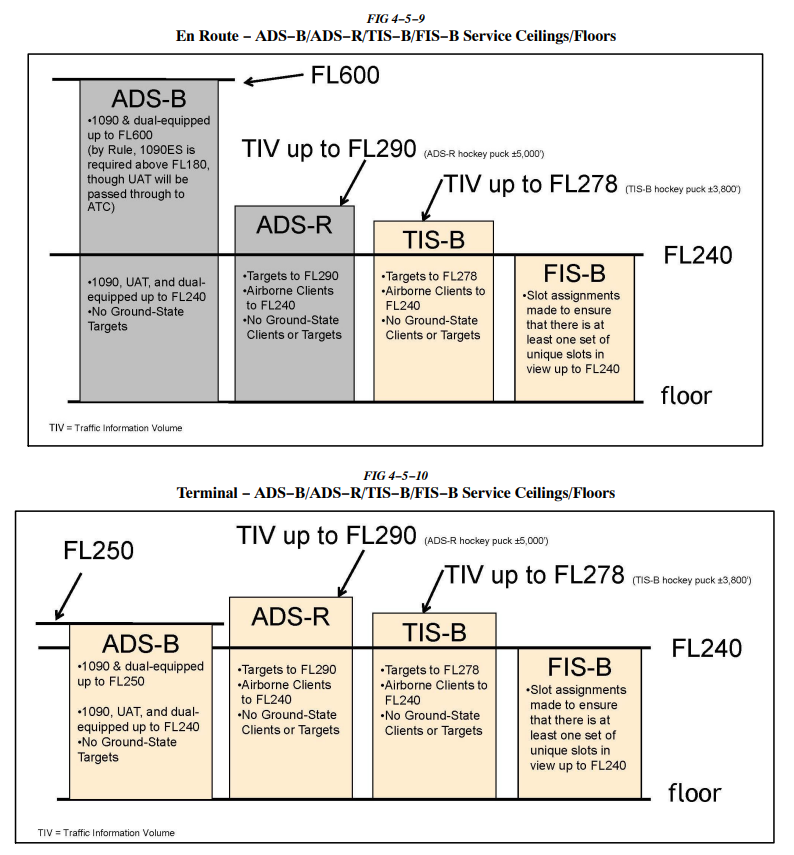
1. Automatic Dependent Surveillance-Broadcast(ADS-B)는 NAS에 배치된 감시 기술이다(그림 4-5-8 참조). ADS-B 시스템은 항공기 항전 장비, 그리고 지상 시설로 구성된다. 항공기 항전 장비는 GNSS를 사용하여 항공기 위치를 결정한다. 그 다음 항공기의 위치 정보를 추가 정보들과 함께 지상국에 전송한다(1초마다 약 한 번의 속도로 전송). 이러한 정보들은 ATC, 그리고 기타 ADS-B 서비스에서 사용될 수 있다(그림 4-5-9와 4-5-10 참조).
2. 미국 내 ADS-B 항공기는 두 가지 주파수 중 하나를 통해 정보를 교환한다: 978MHz, 혹은 1090MHz. 1090MHz 주파수는 Mode A, C, 그리고 S 트랜스폰더 운영과도 연관이 있다. ADS-B 기능이 통합된 1090MHz 트랜스폰더는 추가적인 ADS-B 정보와 함께 트랜스폰더 메시지를 확장한다. 이러한 추가적인 정보를 “extended squitter(확장 스퀴터)” 메시지라 하며 1090ES 라고도 불린다. 978MHz에서 작동하는 ADS-B 장비는 UAT(Universal Access Transceiver)로 알려져 있다.
3. ADS-B 항전 장비는 정보를 송신 및 수신할 수 있는 기능을 가질 수 있다. 항공기에서 ADS-B 정보를 전송하는 것을 ADS-B Out이라 한다. 항공기가 ADS-B 정보를 수신하는 것을 ADS-B In이라 한다. 14 CFR 91.225에서 규정된 공역 내를 운영 중인 모든 항공기는 ADS-B Out 항전 장비를 사용하여 91.227에 규정된 정보를 전송해야 한다.
4. 일반적으로 18,000ft 이상(A등급 공역)을 비행하는 운영자는 1090ES 장비를 갖춰야 한다. 18,000ft 미만을 비행하는 항공기는 UAT나 1090ES 장비를 사용할 수 있다(14 CFR 91.225 및 91.227 참조). ADS-B In을 갖춘 운영자는 ADS-B broadcast services로부터 추가적인 이점을 얻을 것이다: Traffic Information service – Broadcast(TIS-B) (Paragraph 4-5-8)와 Flight Information Service – Broadcast(FIS-B) (Paragraph 4-5-9).
b. ADS-B Certification and Performance Requirements.
ADS-B는 ADS-B Out을 통해 항공 교통 분리 서비스를 위한 감시 출처로 증명될 수 있다. 또한 ADS-B 장비는 ADS-B In advisory services와 함께 사용되도록 증명될 수 있다. 이는 항공기에 항적 및 비행 정보를 나타낸다. 특정 장비의 기능에 대해서는 항공기의 flight manual supplement나 POH를 참조한다.
c. ADS-B Capabilities and Procedures.
1. ADS-B는 공대공 및 공대지 감시 서비스를 향상시켜준다(특히 지형으로 인해 레이더가 효과적이지 않은 지역에서, 혹은 비용이 많이 들거나 실용적이지 못한 지역에서). 공대공 ADS-B는 “advisory” 용도로만 사용되며 이는 조종사가 공중에 있을 때, 혹은 지상에 있을 때 근처 항적의 육안 확인을 돕는다. 또한 ADS-B를 통해 ATC와 fleet operators는 지상국 범위 내에서 항공기를 모니터링 할 수 있다.
2. ADS-B가 전송하는 데이터들 중 하나는 항공기 식별 부호(Flight Identification – FLT ID)이다. FLT ID는 최대 7개의 영숫자로 구성된다. 이는 비행 계획서에 제출한 항공기 식별 부호와 일치해야 한다. airline aircraft와 commuter aircraft의 경우 FLT ID는 보통 회사의 이름과 항공편이다(예를 들어 AAL3432). 승무원은 보통 비행 전에 이를 항전 장비에 입력한다. 범용 항공의 경우 만약 항전 장치가 FLT ID의 수정을 허용한다면 조종사는 비행 전에 FLT ID를 입력할 수 있다. 그러나 일부 ADS-B에서는 항공기 등록 부호가 FLT ID로 설정되어야 한다(예를 들어 N1234Q). 이 경우 조종사가 FLT ID를 변경할 수 없다. 두 경우 FLT ID는 비행 계획서에 제출한 항공기 식별부호와 일치해야 한다.
ATC automation systems는 특정 공역 내 각 항공기를 고유하게 식별하기 위해 ADS-B FLT ID를 사용한다. 그리고 감시 및 분리 서비스를 제공하기 위해 이 항공기들을 비행 계획서와 연관시킨다. 만약 FLT ID와 비행계획서의 항공기 식별 부호가 일치하지 않으면 Call Sign Mis-Match(CSMM)가 발생한다. 이로 인해 ATC automation systems는 해당 항공기를 비행 계획서와 연관시키지 않을 수 있다. 이 경우 CSMM이 수정되기 전까지 항공 교통 서비스가 지연되거나, 혹은 제공되지 않을 수 있다. 따라서 조종사들은 FLT ID가 비행 계획서의 항공기 식별 부호와 정확히 일치하는지 확인하는 것이 필수적이다.
3. 각각의 ADS-B 항공기에는 unique ICAO address(24-bit address라고도 불림)가 할당된다. 이는 ADS-B 송신기에 의해 방송된다. 이러한 ICAO address는 장치 설치 시 프로그래밍 된다. 만약 여러 항공기가 동일한 ADS-B Only Service Volume을 통과하는 동안 동일한 ICAO address를 방송한다면 ADS-B 네트워크는 target을 올바르게 추적하지 못할 수 있다. 만약 radar reinforcement가 가능하다면 추적은 계속된다. 만약 radar reinforcement가 불가능하다면 관제사는 하나의, 혹은 두 개의 target에 대한 추적을 완전히 잃을 수 있다. 따라서 ICAO address의 입력이 정확해야 한다.
4. UAT 데이터 링크에 ADS-B 항전 장비를 장착한 항공기는 anonymous 24-bit ICAO address를 방송할 수 있는 기능을 가지고 있다. 이 모드에서 UAT 시스템은 무작위의 address를 생성한다. 이는 실제 ICAO address와 일치하지 않는다. UAT anonymous 24-bit address 기능은 운영자가 IFR 비행 계획서를 제출하지 않았으며 ATC 서비스를 요청하지 않은 경우에만 사용될 수 있다. anonymity mode에서는 항공기의 beacon code를 1200으로 설정해야 한다. 제조사에 따라 항공기 FLT ID가 전송되지 않을 수 있다. UAT anonymity mode에서는 ATC separation service와 flight following service를 받을 수 없음을, 그리고 ADS-B search and rescue 기능의 혜택을 받지 못할 수 있음을 알아야 한다.
5. 트랜스폰더와 통합된 ADS-B 시스템의 경우 트랜스폰더에 7500, 7600, 혹은 7700이 입력되었을 때 해당 비상 상태를 자동으로 설정한다. 트랜스폰더와 통합되지 않은 ADS-B 시스템, 혹은 optional emergency code를 갖춘 ADS-B 시스템의 경우 인터페이스를 통해 적절한 비상 코드를 입력해야 한다. ADS-B는 지상 및 공중에서의 사용을 위한 것이다. 공항의 surface movement area에서, 혹은 공중에서 transponder/ADS-B 시스템은 항상 “ON” 상태로 유지되어야 한다(단, ATC가 달리 지시한 경우 제외).
d. ATC Surveillance Services using ADS-B – Procedures and Recommended Phraseology
레이더 절차는 AIM Chapter 4와 5에서 레이더에 대해 규정하는 절차와 동일하다(단, 이 paragraph에 나타난 것은 제외).
1. Preflight:
VFR 비행 계획서나 IFR 비행 계획서를 제출하였을 때 ATC 서비스가 예상되는 경우 항공기 식별부호(비행 계획서에 입력한 것)가 ADS-B에 FLT ID로 입력되어야 한다.
2. Inflight:
공중에서 감시 서비스를 요청하는 경우 조종사는 ATC와 교신하기 전에 anonymous 기능을 비활성화 해야 한다(단, 이 기능을 갖춘 경우). 또한 조종사는 ADS-B FLT ID가 비행 계획서의 항공기 식별 부호와 일치하는지 확인해야 한다.
3. Aircraft with an Inoperative/Malfunctioning ADS-B Transmitter:
(a) ADS-B 송신기가 작동하지 않거나, 혹은 고장 난 것으로 보일 경우 ATC는 이를 조종사에게 알린다:
PHRASEOLOGY-
YOUR ADS-B TRANSMITTER APPEARS TO BE INOPERATIVE/MALFUNCTIONING. STOP ADS-B TRANSMISSIONS.
(b) ADS-B 송신기를 꺼야할 상황이 발생한 경우 ATC는 이를 조종사에게 알린다.
PHRASEOLOGY-
STOP ADS-B TRANSMISSIONS.
(c) 그 외의 고장 및 고려 사항:
automatic altitude reporting 기능이 상실될 경우(encoder 고장) ATC의 고도 조언 서비스가 상실될 것이다.
4. Procedures for Accommodation of Non-ADS-B Equipped Aircraft:
(a) ADS-B를 갖추지 않은 항공기의 조종사는 14 CFR 91.225에서 ADS-B airspace로 지정된 공역의 외부만을 운영할 수 있다. 이러한 항공기의 조종사가 ADS-B airspace를 비행하고자 한다면 규정을 벗어나도록 요청할 수 있다. 이를 위한 지침은 Advisory Circular 90-114에서 제공된다.
(b) ATC는 ADS-B가 장착된 항공기와 ADS-B가 장착되지 않은 항공기를 식별할 수 있다. 그러나 ADS-B가 장착되지 않은 항공기가 ADS-B airspace에 진입하기 위한 비행 전 허가를 받았는지의 여부는 알지 못한다. ADS-B airspace를 운영하기 위한 사전 승인을 받지 않은 ADS-B non-equipped aircraft가 ADS-B airspace를 통과하는 heading, route, 혹은 altitude를 ATC로부터 받을 경우 문제가 발생할 수 있다. 이러한 clearance는 단순히 항적, 기상, 혹은 비행경로 단축을 위한 것일 수 있다. 이 경우 조종사는 clearance를 acknowledge 하되 ADS-B가 장착되지 않았음을, 그리고 ADS-B airspace에서 운영하기 위한 사전 승인을 받지 않았음을 관제사에게 알려야 한다. 관제사는 clearance를 계속 진행하거나, 혹은 ADS-B airspace를 회피하도록 clearance를 수정한다. 이러한 상황에서는 ADS-B를 장착하지 않은 항공기에 대한 단속 조치를 취하지 않는다.
NOTE-
ADS-B를 갖추지 않은 조종사는 ADS-B airspace에 진입하는 경로, 혹은 고도로의 변경 요청을 해서는 안 된다(단, 기상 회피와 같은 비행 안전을 위해서는 제외). 이러한 항공기는 ATC에 의해 비행 수정이 시작된 경우에만 규정을 준수하는 것으로 간주된다.
EXAMPLE-
1. ATC: “November Two Three Quebec, turn fifteen degrees left, proceed direct Bradford when able, rest of route unchanged.”
Aircraft: “November Two Three Quebec, turning fifteen degrees left, direct Bradford when able, rest of route unchanged. Be advised, we are negative ADS-B equipment and have not received authorization to operate in ADS-B airspace.”
ATC: “November Two Three Quebec, roger” or “November Two Three Quebec, roger, turn twenty degrees right, rejoin Victor Ten, rest of route unchanged.”
2. ATC: “November Four Alpha Tango, climb and maintain one zero thousand for traffic.”
Aircraft: “November Four Alpha Tango, leaving eight thousand for one zero thousand, Be advices, we are negative ADS-B equipment and have not received authorization to operate in ADS-B airspace.”
ATC: “November Four Alpha Tango, roger” or “November Four Alpha Tango, roger, cancel climb clearance, maintain eight thousand.”
REFERENCE-
Federal Register Notice, Volume 84, Number 62, dated April 1, 2019
e. ADS-B Limitations.
항적에 대한 ADS-B cockpit display를 충돌 회피 시스템으로 사용해서는 안 된다. 그리고 이는 다른 항공기를 “see and avoid” 해야 하는 조종사의 책임을 완화하지 않는다. (Paragraph 5-5-8, See and Avoid 참조). IMC 도중, 혹은 intruder aircraft의 육안 확인이 되지 않는 도중 회피 기동을 위해 ADS-B를 사용해서는 안 된다. ADS-B는 다른 항적의 육안 확인을 돕기 위한 것이다. 화면에 표시되는 ADS-B target의 직접적 결과로 회피 기동이 제공되지도 인가되지도 않는다.
f. Reports of ADS-B Malfunctions.
ADS-B 사용자는 시스템의 바람직하지 못한 성능에 대해 보고함으로써 장치의 오작동을 수정하는데 도움을 줄 수 있다. ADS-B 성능은 ATC가 아닌 정비직원에 의해 모니터링 되므로 가장 가까운 FSS(Flight Service Station) 시설에 무선이나 전화로 보고하거나, 혹은 ADS-B 업무 지원 센터로 이메일을 보낸다. 보고에는 다음을 포함해야 한다:
4-5-8. Traffic Information Service-Broadcast(TIS-B)
a. Introduction
TIS-B는 지상국으로부터 ADS-B(1090ES나 UAT) 항공기에게 항적 정보를 방송하는 것이다. 이러한 항적 정보는 ground-based air traffic surveillance sensors로부터 얻어진 것이다. ground sensors의 충분한 감시 범위와 ADS-B ground radio stations의 충분한 방송 범위가 모두 있는 곳에서 TIS-B 서비스를 이용할 수 있다. TIS-B가 제공하는 항적 정보의 품질은 ground sensors의 개수 및 유형, 그리고 정보의 적시성에 따라 달라진다(그림 4-5-9와 4-5-10 참조).
b. TIS-B Requirements.
TIS-B 서비스를 수신하기 위해서는 다음 조건들이 존재해야 한다:
1. 항공기는 ADS-B 송신기/수신기나 송수신기, 그리고 CDTI(cockpit display of traffic information)를 갖추어야 한다.
2. 항공기는 TIS-B 업링크용으로 설정된 ground radio station의 범위 내를 비행해야 한다(모든 ground radio stations가 TIS-B를 제공하는 것은 아니다. 이는 레이더 범위가 부족하거나, 혹은 radar feed를 사용할 수 없기 때문이다).
3. 현재 사용 중인 ground radio station을 서비스하는 ATC radar의 범위 내에 있어야 한다.
c. TIS-B Capabilities.
1. TIS-B는 모든 주변 항공기가 ADS-B Out을 갖추지 않은 상황에서 ADS-B 항공기에게 보다 완벽한 항적 상황을 제공한다. 이는 다른 항적의 육안 확인을 향상시키기 위한 것이다.
2. 트랜스폰더만을 갖춘 targets(즉, Mode A/C나 Mode S transponder)는 ATC ground system architecture를 통해 전송된다. 레이더 배치로 인해 일부 공항 근처의 저고도에서는 감시 범위가 제한될 수 있다. 그 결과 TIS-B 서비스 범위가 제한될 수 있다. 특정 영역 내에 레이더 감시 범위가 없다면 TIS-B 범위 또한 없다.
d. TIS-B Limitations.
TIS-B를 충돌 회피 시스템으로 사용해서는 안 된다. 그리고 이는 14CFR 91.113b에 따라 다른 항공기를 “see and avoid” 해야 하는 조종사의 책임을 완화하지 않는다. intruder aircraft의 육안 확인이 되지 않는 도중 회피 기동을 위해 TIS-B를 사용해서는 안 된다. TIS-B는 다른 항적의 육안 확인을 돕기 위한 것이다.
NOTE-
화면에 표시되는 TIS-B target의 직접적 결과로 회피 기동이 인가되지는 않는다.
2. TIS-B는 항적의 육안 회피에 도움이 된다. 허나 이를 올바르게 사용하기 위해서는 시스템의 한계를 이해해야 한다.
(a) 조종사는 간헐적으로 자기 자신의 TIS-B target을 수신할 수 있다. 이는 일반적으로 기동(예를 들어 상승 선회) 도중 발생한다. 왜냐하면 레이더는 ADS-B만큼 빠르게 항공기를 추적하지 않기 때문이다.
(b) 지상 시스템의 ADS-B-to-radar association process는 때때로 항공기의 ADS-B report와 radar returns를 서로 관련시키는데 어려움을 겪을 수 있다. 이 경우 cockpit display에 중복된 traffic symbols(즉, “TIS-B shadows”)가 발생할 수 있다.
(c) TIS-B의 항적 보고 업데이트는 ADS-B의 항적 업데이트보다 빈도가 적다. TIS-B 위치 업데이트는 레이더 시스템의 유형에 따라 3 ~ 13초에 한 번 발생한다. 이에 반해 ADS-B의 업데이트 속도는 명목상 초당 한 번이다.
(d) TIS-B 시스템은 트랜스폰더 항공기와 관련된 정보만을 업링크 한다. 트랜스폰더가 없는 항공기는 TIS-B traffic으로 표시되지 않는다.
(e) 항공기가 TIS-B 서비스 범위의 내부를 운항 중인지, 혹은 외부를 운항 중인지를 나타내는 표시가 제공되지 않는다. 따라서 TIS-B 항적 정보를 수신중인지를 알기 어렵다.
TIS-B targets를 표시하는 공중 장비는 조종사의 상황 인식을 위한 것이지 충돌 회피 장치가 아니다. TIS-B display에 나타난 항적에 대응하여 기동을 수행하기 전에 ATC의 승인을 받아야 한다(단, 14 CFR 91.123에서 허용하는 특정 조건인 경우 제외). ATC의 승인 없이 기동을 수행할 경우 공중 장비에는 표시되지 않은 다른 항적과 근접하게 만들 수 있다. 이는 pilot deviation, 혹은 그 외 사고로 이어질 수 있다.
e. Reports of TIS-B Malfunctions.
TIS-B 사용자는 시스템의 바람직하지 못한 성능에 대해 보고함으로써 장치의 오작동을 수정하는데 도움을 줄 수 있다. TIS-B 성능은 ATC가 아닌 정비직원에 의해 모니터링 되므로 가장 가까운 FSS(Flight Service Station) 시설에 무선이나 전화로 보고하거나, 혹은 ADS-B 업무 지원 센터로 이메일을 보낸다. 보고에는 다음을 포함해야 한다: