arrival and approach를 위한 준비는 en route 구간으로부터 하강하기 훨씬 전에 시작된다. 조기에 계획을 세움으로써 조종사는 항공기를 정밀하게 제어하는데 집중할 수 있으며 비행의 마지막 구간에서 발생할 수 있는 문제를 더 제대로 대처할 수 있다.
이 장은 IFR(instrument flight rule) arrivals를 위해 조종사와 ATC가 사용하는 절차를 중점적으로 설명한다. 그 목적은 en route 구간과 approach 구간 사이의 전환과 관련된 ATC arrival procedures와 조종사 책임을 제공하기 위함이다. 이 장은 STARs(standard terminal arrival routes), descent clearances, descent planning, 그리고 ATC procedures를 강조하며 en route 구간(보통 STAR가 시작되는 지점)과 STAR 종료 지점 사이의 전환에 중점을 둔다.
IFR arrival options에는 en route structure에서 approach gate나 IAF(initial approach fix)로 직접 향하는 것, visual arrival, STARs, 그리고 radar vectors가 포함된다. 관제 공역 내에서 ATC는 분리를 위해, 소음 감소를 위해, 운영상 이점이 있을 때, 혹은 조종사가 요청할 때 radar vectors를 사용한다. 관제 공역 바깥에서의 vectors는 조종사 요청 시에만 제공된다. 관제사가 vector를 시작하였으며 해당 vector가 이전에 할당하였던 non-radar route를 벗어나게 만드는 경우 관제사는 vector의 목적을 알려준다. area navigation(RNAV) routes를 운영하는 경우에는 보통 자체 항법을 유지하도록 허용된다.
가장 중요한 항행 조건은 항공기를 안전하게 분리해야 한다는 것이다. non-radar environment의 경우 ATC는 항적들을 분리할 수 있는 자체적 수단이 없다. 따라서 ATC는 항공기의 실제 위치 및 고도를 결정하기 위하여 조종사가 제공하는 정보를 전적으로 의존해야 한다. 이 경우 ATC가 분리를 제공하기 위해선 정확한 항법이 필수적이다.
심지어 radar environment에서도 특정 상황의 경우 정확한 항법 및 위치 보고가 여전히 분리를 제공하는 주요 수단이다. 대부분의 상황에서 ATC는 항공기의 항법을 책임지지 않는다. ATC는 조종사들의 정확한 항법에 의존하므로 모든 IFR operations 도중 비행 안전은 특정 수준의 항법 성능을 달성 및 유지하는 조종사의 능력에 달려있다. ATC는 레이더를 사용하여 항법 성능을 감시하고, 항법 오류의 가능성을 감지하며, 교통 흐름을 신속하게 처리한다. non-radar environment의 경우 ATC는 항공기의 실제 위치, 혹은 다른 항공기와의 관계에 대한 자체적 수단이 없다. 따라서 clearance로부터 편차가 발생할 경우 항법 오류를 감지하는, 그리고 충돌 위험을 해결하는 ATC의 능력이 심하게 저하된다.
항법 성능의 개념은 특정 경로 및 고도에 대해 유지되어야 하는 정밀도를 포함한다. 항법 성능의 수준은 항적의 양, 그리고 비행경로의 복잡성에 따라 지역마다 다르다. 항법 성능의 수준은 대양이나 외딴 육지보다 국내 공역에서 더 정밀해야 한다. 왜냐하면 국내 공역의 항적 밀도가 훨씬 더 높기 때문이다.
항법 성능의 개념은 14 CFR Part 121.103과 121.121에 규정되어 있다(각 항공기는 ATC에 필요한 수준의 정확도로 항행해야 함). 14 CFR Part 91.123의 조건들도 이러한 기본 개념을 반영한다. commercial operators는 본인의 운영기준을 준수해야 하고, navigational operations의 범주를 이해해야 하며, ATC에 필요한 수준의 정확도로 항행할 수 있어야 한다.
navigational operations는 두 가지 범주로 나뉜다: Class I navigation, 그리고 Class II navigation. Class I navigation은 ICAO standard NAVAIDs(VOR, VOR/DME, NDB, 등등) 서비스 범위 내의 관제공역이나 비관제공역에서 수행되는 모든 en route operation을 의미한다.
Class II navigation은 Class I navigation으로 분류되지 않는 모든 en route operation으로 여기는 ICAO standard NAVAIDs의 서비스 범위 바깥에서 이루어지는 모든 운영이나 운영의 일부를 포함한다. 예를 들어 VOR만을 갖춘 항공기가 federal VORs의 서비스 범위 바깥을 운항하는 경우 해당 항공기는 Class II navigation을 수행한다. Class II navigation이 자동으로 장거리 특수 항법 시스템을 요구하지는 않는다. 특수 항법 기술이 conventional NAVAIDs를 보완하는 경우에는 이러한 NAVAIDs를 통해 Class II navigation을 수행할 수 있다. Class II navigation은 대양을 횡단하는 운항을, 그리고 외딴 육지에서의 운항(예를 들어 북극)을 포함한다. Class II operations에 승인된 특수 항법 시스템의 유형에는 INS(inertial navigation system), Doppler, 그리고 GPS(global positioning system)가 있다. 그림 3-1은 Class I/Class II navigation의 몇 가지 예시를 제공한다.
Descent Planning
순항으로부터의 하강을 계획하는 것은 중요하다. 왜냐하면 올바르게 구성된 상태로 approach gate에 도달하기 위해 대기속도와 고도를 소멸시켜야하기 때문이다. 너무 이르게 하강할 경우 낮은 고도에서의 비행시간이 증가하여 연료 소모가 증가한다. 반면 너무 늦게 하강할 경우 접근 도중 대기속도와 하강률을 제어하는데 문제가 발생한다. 비행 전에 조종사는 특정 계기 접근에 대해 cruising altitude로부터 approach gate altitude까지 하강하는데 필요한 연료, 시간, 그리고 거리를 계산해야 한다. 하강 전에 조종사는 목적지의 기상(바람 정보 포함)을 확인해야 한다. 목적지 공항의 기상이 좋지 않을 경우 하강이 느려지거나, 혹은 실패접근이 필요할 수 있다. 이들은 충분한 양의 연료를 필요로 하므로 하강을 시작하기 전에 계산되어야 한다. 하강을 계획하기 위해 조종사는 cruise altitude, approach gate altitude나 initial approach fix altitude, descent groundspeed, 그리고 descent rate를 알아야 한다. 비행 도중 고도, 기상, 그리고 바람의 변화에 따라 이러한 정보들을 업데이트해야 한다. approach gate는 ATC가 항공기를 final approach course로 vector 하는데 사용하는 가상의 지점이다. approach gate는 final approach course를 따라 FAF(final approach fix)로부터 1NM(공항 반대편으로) 떨어진 지점에 설정되며 landing threshold로부터 5NM 이내에 위치해서는 안 된다.
자주 사용되는 기법 중 하나는 descent rule of thumb이다. 이는 새로운 고도에 도달하고자 하는 지점까지의 거리를 기준으로 하강 시점을 결정하는데 사용된다. 먼저 하강해야 하는 고도를 300으로 나눈다. 예를 들어 cruising altitude(7,000ft)에서 pattern altitude(1,000ft)로 하강하는 경우 6,000ft의 고도 손실이 필요하다. 이를 300으로 나누면 20이 된다. 따라서 20NM 전에 하강을 시작해야 한다. 또한 어떤 ROD(rate-of-descent)가 사용되어야 하는지를 알아야 한다.
3도 경로에 대한 ROD를 결정하기 위해선 groundspeed에 5를 곱하면 된다. 120knots로 비행하는 경우 원하는 경로를 비행하기 위한 ROD는 600fpm(120 x 5 = 600)이 된다. 이전 예시에서 6,000ft의 고도 손실을 위해선 20NM 지점에서 하강을 시작해야 한다고 결정하였다. groundspeed가 120knots인 경우 이는 항공기가 분당 2NM을 이동함을 의미한다. 따라서 20NM을 이동하기 위해선 10분이 걸린다. 600fpm으로 10분을 이동한다는 것은 6,000ft가 손실된다는 것을 의미한다.
이러한 계산이 비행 전에 이루어져야 하며 비행 도중 rules of thumb가 업데이트 되어야 한다. 예를 들어 조종사는 STAR의 “cross 40 DME West of Brown VOR at 6,000”이라는 expected clearance를 기준으로 하강을 계획한 다음 250노트로부터의 감속을 위하여 rule of thumb를 적용할 수 있다. 여기에는 특정 지점에서의 대기속도 계획이 포함될 수 있다(예를 들어 runway threshold로부터 25NM 지점에서는 250knots, 20NM 지점에서는 200knots, 그리고 15NM 지점에서는 150knots).
Vertical Navigation(VNAV) Planning
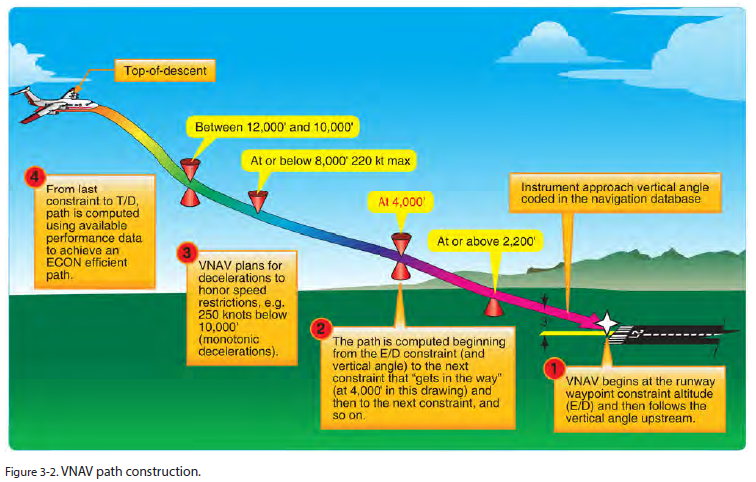
VNAV는 flight plan의 수직 구성 요소이다. 접근 경로는 TOD(top-of-descent) point에서 E/D(end-of-descent) waypoint(이는 보통 활주로, 혹은 MAP임)까지 계산된다(non-FMS aircraft의 경우 approach gate까지 계산됨). VNAV path는 항공기 성능, approach constraints, 기상 정보(바람, 온도, 착빙 조건, 등등), 그리고 항공기 무게를 기반으로 계산된다.
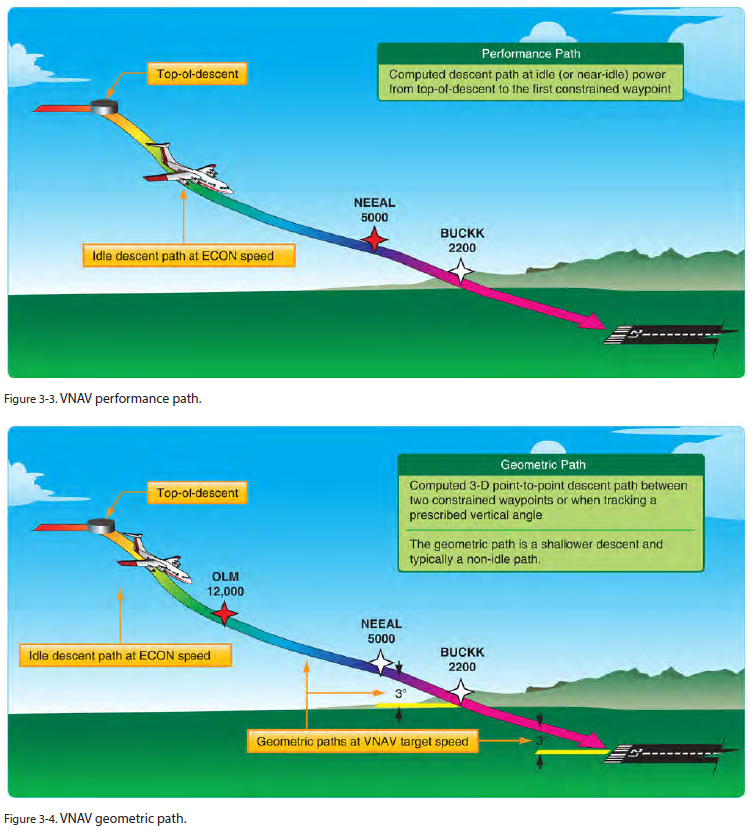
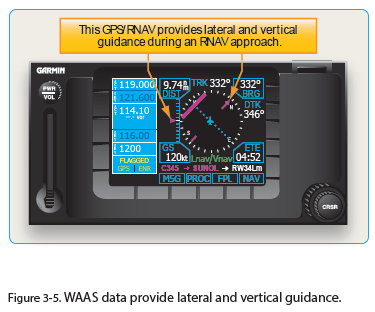
FMS가 사용하는 두 가지 유형의 VNAV paths는 performance path, 혹은 geometric path이다. performance path는 idle(혹은 near idle) power를 이용하여 TOD에서 첫 번째 constrained waypoint까지 계산된다. [그림 3-3] geometric path는 두 개의 constrained waypoints 사이에서, 혹은 특정 vertical angle에서 point-to-point descent로 계산된다. geometric path는 performance path보다 얕으며 보통 non-idle path이다. [그림 3-4]
LNAV/VNAV Equipment
lateral navigation/vertical navigation(LNAV/VNAV) equipment는 측면 접근 경로 안내와 수직 접근 경로 안내를 모두 제공한다는 점에서 ILS(instrument landing system)과 유사하다. LNAV/VNAV minimums를 사용하는 접근은 baro-VNAV(barometric VNAV) systems 및/혹은 WAAS(wide area augmentation system)을 사용한다.
Note: WAAS는 GPS로부터 발생한 위치 정보의 부정확성을 탐지 및 수정하는데 사용되는 지상국들을 활용한다. WAAS를 통해 수직 위치 정보의 정확도가 3m 이내로 향상된다.
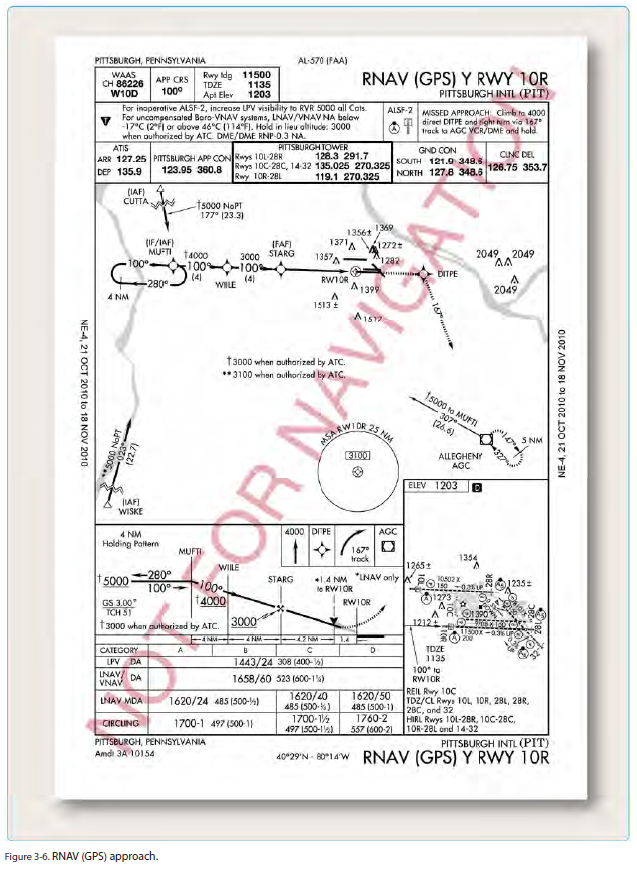
WAAS를 사용하기 위해선 WAAS 신호 수신 기능을 갖춘 IFR-approved GPS receiver를 장착해야 한다. 이는 WAAS의 오류 보정 신호를 위치 결정 절차에 통합한다. WAAS를 지원하는 GPS 수신기를 통해 조종사는 RNAV approach를 로딩할 수 있으며 접근 차트에 표시된 lateral/vertical profile을 따라 안내를 받을 수 있다. [그림 3-5 및 3-6] 항공기에 어떤 종류의 장비가 설치되어 있는지, 그리고 어떤 용도가 승인되어 있는지를 파악하는 것은 매우 중요하다. 또한 WAAS 기능이 없는, 혹은 WAAS를 갖추지 않은 IFR approved GPS receivers의 VNAV 기능을 통해 항공기가 LNAV/VNAV minimums를 비행할 수 있는 것은 아니라는 점을 이해해야 한다.
FMS는 대부분의 최신 항공기, 항공사, 그리고 performance based navigation을 필요로 하는 모든 운영자들의 주된 수단이다. 대부분의 최신 FMS는 LNAV/VNAV와 WAAS를 갖추고 있다. FMS는 VNAV path를 따라 flight control steering을, 그리고 thrust guidance를 제공한다. 일부 시스템은 VNAV path만을 알려줄 뿐 auto-throttle 기능은 갖추지 않을 수 있다. 이러한 시스템의 경우 arrival/approach 구간 도중 하강 경로를 유지하기 위한 조종사 업무량이 증가한다.
Descent Planning for High Performance Aircraft
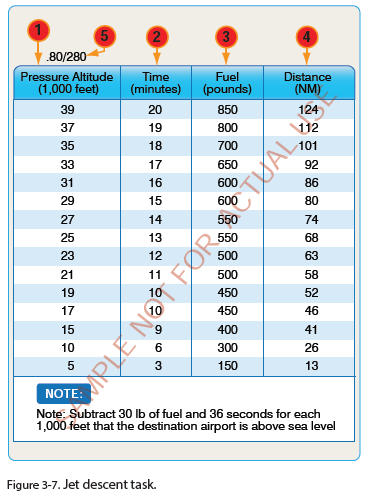
turbojets의 경우 비행 전 계획 도중 approach gate 및 airport environment로의 IFR descent를 계획하는 것이 특히나 중요하다. 이때 high performance aircraft를 위한 TOD가 사용되며 이는 approach gate 고도를 기초로 직접 계산되거나, 혹은 FMS를 통해 자동으로 계산된다. 제트 항공기의 initial IFR descent planning을 위한 일반적인 rule of thumb는 3 : 1 법칙이다. 이는 1,000ft를 하강하는데 3NM이 소요됨을 의미한다. 비행기가 FL 310에 있으며 approach gate나 initial approach fix가 6,000ft에 있다면 initial descent에 25,000ft(31,000 – 6,000)가 필요하다. 25에 3을 곱하면 75가 된다. 따라서 normal jet airplane, idle thrust, speed Mach 0.74 ~ 0.78, 그리고 VS 1,800 ~ 2,200 fpm을 기반으로 approach gate로부터 75NM 지점에서 하강을 시작한다. 배풍이 부는 경우 배풍 10knots 당 2NM을 더한다. 정풍이 부는 경우 정풍 10knots 당 2NM을 뺀다. descent planning 도중 최신 METAR(aviation routine weather report)나 ATIS(automatic terminal information service)를 통해 목적지 공항에서 사용 중인 활주로를 확인한다. 현재 사용 중인 활주로, 그리고 STAR에 따라 거리가 크게 달라질 수 있다. 그 목표는 가장 경제적인 하강 지점을 결정하는 것이다.
normal jet descent-planning chart의 예시가 그림 3-7에 나타나 있다. 1번 항목은 하강이 시작되는 기압 고도를, 2번 항목은 하강에 필요한 시간을, 3번 항목은 해수면까지 하강하는 도중 소비되는 연료량을, 그리고 4번 항목은 비행거리를 나타낸다. 5번 항목은 Mach 0.80의 대기속도를 기준으로 함을(단, 280KIAS에 도달하기 전까지) 의미한다. 10,000ft MSL 미만에서의 속도 제한(250knots)의 경우 그 영향이 미미하므로 차트에 포함되지 않는다. 또한 온도나 무게의 변화로 인한 영향은 무시할 수 있는 수준이므로 생략되었다.
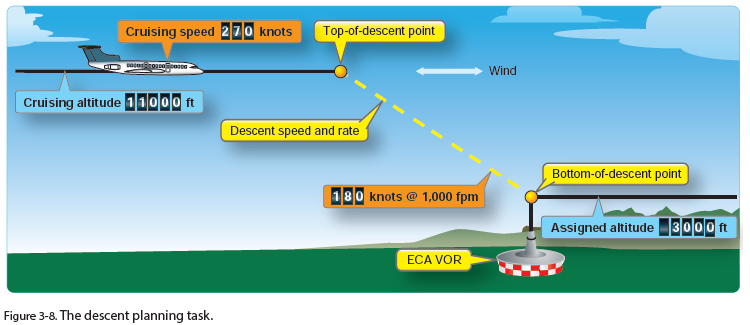
순항 및 하강 도중 조종사는 해당 제조업체의 권장 사항에 맞춰 항공기를 관리해야 한다. flight manuals와 operating handbooks에는 cruise/descent checklists, 특정 순항 외장에 대한 performance charts, 그리고 descent charts(하강에 필요한 연료, 시간, 그리고 거리에 대한 정보를 제공하는 차트)가 포함되어 있다. 조종사들은 매 비행 전에 이러한 정보를 검토함으로써 항공기가 순항 및 하강 도중 어떻게 운항되어야 하는지를 알아야 한다. stabilized descent란 적절한 하강 경로를 유지하기 위하여 적절한 출력을 설정하고, 최소한의 조종간 입력을 적용하는 preplanned maneuver를 의미한다. 과도한 조종간 입력이 발생한 경우 이는 하강이 부적절하게 계획되었음을 나타낸다. 순항 고도로부터의 IFR descent를 계획함으로써 계기 접근이 시작되기 전에 항공기가 approach gate altitude나 initial approach fix altitude에 도달할 수 있도록 만든다. 예를 들어 3,000ft에서의 crossing restriction을 만족하기 위하여 11,000ft에서 하강해야 한다. [그림 3-8] 목적지 공항 접근 도중 200knots의 속도 제한이 있으므로 조종사는 190knots의 하강 속도와 1,000fpm의 하강률을 선택하였다. 10knot의 정풍이 있다 가정할 경우 groundspeed는 180knots이다.
Descending From the En Route Altitude
순항 구간으로부터 계기 접근 절차로 전환하기 위해선 특정 waypoint에 특정 고도로 도달해야 하는 경우가 있다. 이러한 조건이 arrival procedure에 게재되어 있는 경우, 혹은 ATC에 의해 발부된 경우 이를 crossing restriction이라 부른다. 설령 ATC가 descent at the pilot’s discretion을 인가하였다 하더라도 조종사는 접근을 시작하기에 편리한 waypoint 및 altitude를 선택해야 한다. 어떠한 경우이든 순항 고도로부터 특정 waypoint나 altitude로 하강하기 위해선 계획이 필요하다.
ATC는 조종사에게 특정 고도로 하강하라 요청할 수 있다. 일반적으로 이러한 clearance는 en route 항적 분리가 목적이므로 조종사는 이에 신속하게 대응해야 한다. 할당받은 고도로부터 1,000ft 상공까지는 최적의 하강률로 하강한다. 그런 다음 할당받은 고도까지는 500 ~ 1,500fpm의 하강률로 하강한다. 조종사는 어떠한 경우이든 최소 500fpm으로 하강할 수 없다면 ATC에 알려야 한다(단, 10,000ft MSL에서 250KIAS로 감속할 때 제외).
두 번째 유형의 clearance는 “descend at pilot’s discretion”이다. ATC가 이러한 clearance를 발부한 경우 조종사는 원하는 때에 원하는 속도로 하강할 수 있다. 또한 조종사는 하강 도중 중간 고도에서 잠시 level off를 수행할 수 있다. 허나 한번 고도를 벗어났다면 해당 고도로 되돌아갈 수 없다.
또한 descent clearance에 “pilot’s discretion” 구간이 포함될 수도 있다(예를 들어 “cross the Joliet VOR at or above 12,000, descend and maintain 5,000”). 이러한 clearance에서 조종사는 Joliet VOR을 12,000ft MSL 이상으로 통과하기만 한다면 언제든 현재 고도에서 하강할 수 있다. 그런 다음에는 5,000ft MSL에 도달할 때까지 정상 하강률로 하강해야 한다.
pilot’s discretion clearance는 ATC만의 선택지가 아니다. 보다 효율적인 운항을 위하여 조종사 또한 이러한 clearance를 요청할 수 있다. 예를 들어 조종사가 overcast layer 상공을 비행 중인 경우 항공기가 최대한 오랫동안 구름 위에 머물 수 있도록 pilot’s discretion을 요청할 수 있다. 이는 현재 착빙이 발생하기 유리한 상황이며 항공기가 착빙 방지 기능을 갖추지 아니한 경우 특히나 중요할 수 있다. 조종사는 순항 고도를 더 오래 유지함으로써 연료를 절약하거나, 혹은 착빙 조건에서의 장시간 비행을 피할 수 있다. 또한 이러한 유형의 하강은 조종사로 하여금 잔잔한 공기에서 수평을 유지할 수 있도록 허용하여 난기류에서 보내는 시간을 최소화해준다.
Controlled Flight Into Terrain(CFIT)
arrivals 도중 부적절한 하강 계획 및 수행으로 인하여 많은 사고가 발생하였다. commercial jet operations가 시작된 이래 9,000명 이상의 사람들이 CFIT(controlled flight into terrain)로 인해 사망하였다. CFIT는 정상적으로 작동하는 항공기가 부주의로 인해 지상, 물, 혹은 장애물에 충돌하는 사고를 말한다.
CFIT 사고의 근본적 원인은 조종사의 상황인식 부족과 관련되어 있다. 상황인식의 한 가지 정의는 항공기와 조종사의 안전한 운항에 영향을 미치는 요인 및 조건을 정확하게 인지하는 것이다. CFIT의 원인은 지상, 물, 혹은 장애물에 대한 수직 위치/수평 위치 인지 부족이다. 모든 CFIT 사고의 2/3 이상이 고도 오류, 혹은 수직 위치 인지 부족으로 인하여 발생한다. CFIT 사고는 보통 저시정 조건이 IMC(instrument meteorological conditions)나 어둠과 복합적으로 작용할 때 자주 발생한다.
관제사와 조종사가 제대로 의사소통을 하지 못하는 것은 CFIT 사고의 원인이다. 과중한 업무량으로 인하여 급하게 교신을 할 수 있으며 이때 축약된, 혹은 비표준 어법이 사용될 수 있다. 원활한 교신의 중요성은 ATC와 MD-80 조종사의 보고서를 통해 명확히 드러났다.
레이더로 항적 상황을 살피던 도중 관제사는 MD-80이 6,400ft를 통과하여 하강하고 있음을 발견하였다. 관제사는 즉시 최소 6,500ft로 상승하라 지시하였다. 관제사의 경고 덕분에 조종사는 지형을 회피하였다. 무선 교신 기록에 따르면 항공기는 7,000ft로 승인되었다. 허나 조종사는 5,000ft라 read back을 하였고 5,000ft로 하강하였다. 조종사가 5,000ft를 read back 하였을 때 관제사로부터의 수정은 없었다. 보고서에서 조종사는 이렇게 말하였다: “산과의 거리가 얼마나 떨어져 있었는지는 모르겠다. 허나 관제사와 조종사 사이의 원활한 교신이 얼마나 중요한지는 확실히 알 수 있었다.”
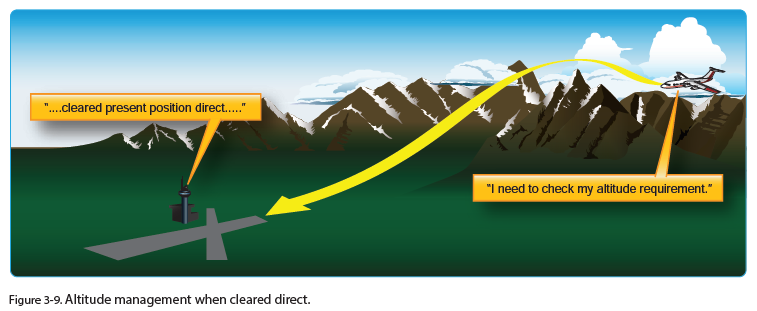
ATC가 항상 항공기의 안전한 지형 회피를 책임지지는 않는다. ATC는 조종사로 하여금 항로를 벗어나 특정 지점으로 직접 향할 수 있도록 en route clearances를 발부하는 경우가 많다. 이러한 유형의 clearance를 수락하는 조종사는 안전한 지형 회피에 대한 책임 공유도 받아들이는 것이다. 조종사는 운항 지역상 가장 높은 지형 및 장애물의 높이를, 그리고 높은 지형에 대한 자신의 위치를 파악해야 한다. [그림 3-9]
조종사와 관제사 사이의 훌륭한 의사소통만이 중요한 것은 아니다. 1974년에 발생한 사고결과 NTSB(National Transportation Safety Board)는 다음과 같이 말하였다: “하강 도중 조종사들이 나눈 불필요한 대화가 조종실 내 해이한 분위기를 나타냈으며 이는 접근 내내 계속되었다.” NTSB는 그 원인을 다음과 같이 말하였다: “조종사들이 규정된 절차를 따르지 않는 등 조종실 규율을 제대로 지키지 않아 접근 도중 critical points에서 고도를 인지하지 못하였다.”
1981년 FAA는 14 CFR Part 121.542/135.100(Flight Crewmember Duties)을 발행하였다. 이는 흔히 “sterile flight deck rules”라 불린다. 이 조항들은 조종사가 arrivals 도중 경로와 고도를 이탈하지 않도록 방지하는데 도움을 제공할 수 있다. 규정은 다음을 명시한다: (a) 모든 조종사들은 critical phase of flight 도중 항공기의 안전한 운항을 위해 필요한 임무를 제외하고는 어떤 임무도 요구하거나 수행할 수 없다. 불필요한 회사 교신, 불필요한 기내 방송, 그리고 불필요한 서류 작업은 항공기의 안전한 운항을 위해 필요하지 않다. (b) 모든 조종사들은 critical phase of flight 도중 조종사의 업무 수행에 방해될 수 있는 모든 활동들에 관여하거나 허가할 수 없다. 식사, 불필요한 대화, 그리고 비행과 관련 없는 간행물 읽기와 같은 활동들은 항공기의 안전한 운항을 위해 필요하지 않다. (c) critical phase of flight(비행 중요 단계)는 모든 ground operations(taxi, takeoff, 그리고 landing 포함)를, 그리고 10,000ft 미만에서 수행되는 기타 모든 flight operations(단, 순항 비행 제외)를 포함한다.
STAR는 특정 공항으로 향하는 입항 IFR 항공기에게 적용하기 위하여 설정된 ATC-coded IFR route이다. STAR는 조종사와 관제사 사이에 중요한 의사소통 형태를 제공한다. 조종사가 STAR에 대한 clearance를 수락할 경우 이는 arrival 도중 어떤 경로로 비행할지, 그리고 경우에 따라서는 어떤 고도 및 속도로 비행할지를 관제사와 주고받은 것이다. STAR는 en route structure를 벗어나 목적지로 향하는 일반적인 방법을 제공한다. STAR는 조종사가 사용할 수 있도록 그래픽 및 텍스트 형식으로 게재되는 preplanned IFR ATC arrival procedure로 이는 clearance delivery procedures를 간소화한다.
DPs(departure procedures)는 공항 활주로에서 시작하여 en route structure로 연결된다. 허나 STARs는 en route structure에서 시작되며 활주로까지 연결되지 않는다. STARs의 경우 주로 여러 활주로에, 그리고 때로는 여러 공항에 서비스를 제공하기 때문이다.
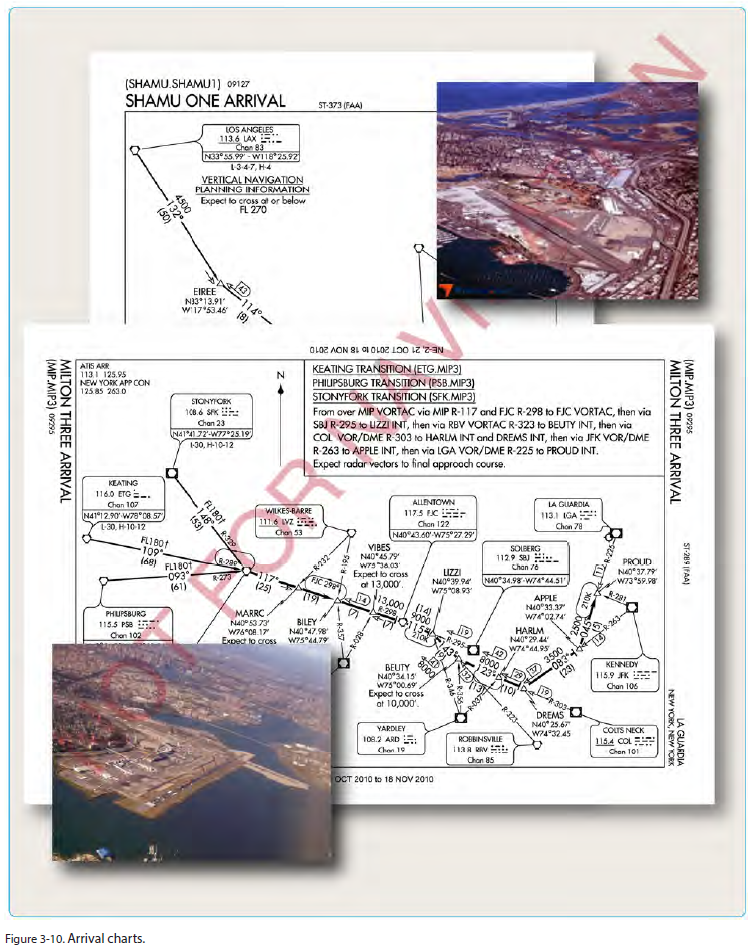
STARs는 en route 구간과 approach 구간 사이의 전환을 용이하게 만든다. STAR는 ATC가 지정한 fix나 NAVAID에서 종료되며 이를 통해 계기 접근 절차에 연결되거나, 혹은 radar vectors가 이루어진다. STAR를 계기 접근 절차와 연결하는 목표는 원활한 수평 및 수직 전환을 위함이다. 전체적인 descent/deceleration profiles가 유지될 수 있도록 STAR와 접근 절차가 서로 연결되어야 한다. 이는 종종 교통량이 많은 terminal area로 향하는 preferred route가 된다. [그림 3-10]
STARs는 en route structure에서 approach gate, outer fix, instrument approach fix, 혹은 arrival waypoint로의 전환을 제공하며 보통 instrument approach procedure나 visual approach procedure에서 종료된다.
conventional NAVAIDs를 기반으로 하는 STARs의 경우 procedure design과 obstacle clearance criteria는 en route criteria와 동일하다(Chapter 2, En Route Operations 참조). STAR procedure는 보통 대략 318ft/NM의, 즉 대략 3도의 descent gradient를 포함한다. 특정 경로를 따라 altitude restrictions가 존재하는 경우 이를 충족하기 위하여 descent gradient가 달라져야 한다. 공역 및 항공 교통 제한으로 인하여 altitude restrictions가 필요한 경우가 많다. STAR에 대한 새로운 설계 지침은 2016년 3월에 발행된 FAA Order 8260.3에 나타나 있다. 일부 STARs는 이전 지침인 FAA Order JO 7110.9에 따라 설계되어 있다. 새로운 지침은 STAR의 마지막 부분에 대하여 더 얕은 descent gradient를 요구한다. 또한 STARs는 speed restriction을 갖춘 모든 waypoint에서의 감속 구간을 고려한다. 이때 보통 10knots의 속도 감소 당 1NM의 거리가 더해진다.
RNAV STARs or STAR Transitions
RNAV로 지정된 STARs는 conventional STARs와 동일한 용도로 사용된다. 허나 이는 FMS나 GPS를 갖춘 항공기만이 사용할 수 있다. RNAV STAR나 STAR transition은 보통 flyby waypoints를 사용한다(운영상 필요한 경우에만 fly over waypoints가 사용됨). descent/deceleration profiles를 최적화하기 위하여 이러한 waypoint에 crossing altitudes/speeds가 할당될 수 있다.
RNAV STAR procedure design은 이 외의 RNAV procedures와 유사한 design criteria를 사용한다. 또한 RNAV STAR procedures는 필수 항법 장비, 조종사 절차, 그리고 STAR 개발에 사용된 절차 및 기준에 따라 RNAV1이나 RNAV2로 지정된다. RNAV 1 지정자나 RNAV 2 지정자는 차트의 notes에 표시된다. RNAV 1 STARs는 RNAV 2보다 더 높은 장비 조건을, 그리고 종종 더 엄격한 RNP(required navigation performance) 허용오차를 가지고 있다. RNAV 1 STARs의 경우 조종사는 RNAV courses를 운항하는 동안 CDI(course deviation indicator)/flight director 및/혹은 autopilot을 LNAV mode로 사용해야 한다. RNAV 1 STARs는 보통 교통량이 많은 지역에 지정된다. 관제사는 다양한 방법으로 RNAV STAR를 승인할 수 있다.
clearance가 단순히 “cleared HADLY ONE arrival”이라 명시된 경우 조종사는 해당 arrival의 측면 경로만을 사용해야 한다.
∙“cleared HADLY ONE arrival, descend and maintain flight level two four zero.”와 같은 clearance를 받은 경우 조종사는 할당받은 고도까지만 하강해야 한다.
∙“descend via”라는 문구를 통해 하강을 승인받은 경우 조종사는 차트에 게재된 lateral guidance와 altitude restrictions를 따라야 한다.
∙또한 관제사는 특정 예외 사항을 갖춘 arrival을 사용하도록 승인할 수도 있다. 예를 들어, "Descend via the Haris One arrival, except after Bruno, maintain one zero thousand." 이 경우 조종사는 BRUNO에 도착하기 전까지 모든 altitude/airspeed restrictions를 준수함과 동시에 lateral/vertical guidance를 따라야 한다. 그런 다음 ATC로부터 하강 승인을 받기 전까지는 10,000ft를 유지한다.
∙또한 STAR를 교차하는 직진 경로가 주어진 다음 lateral guidance와 altitude restrictions를 위해 해당 STAR를 사용하도록 승인될 수도 있다. 예를 들어, “Proceed direct MAHEM, descend via the MAHEM TWO arrival.”
Interpreting the STAR
STAR는 departure/approach chart와 거의 동일한 기호를 사용한다. STAR arrival route(이는 basic STAR procedure나 common route라고도 불림)는 arrival로 향하는 다양한 (en route) transitions가 모이는 하나의 NAVAID, intersection, 혹은 fix에서 시작된다. STAR en route transition은 하나 이상의 en route airways, jet routes, 혹은 RNAV routes를 basic STAR procedure에 연결하는데 사용되는 구간이다. 이는 여러 방향의 항적들을 하나의 STAR로 모으는 여러 경로들 중 하나이다. 이를 통해 여러 방향의 입항 항공편들이 하나의 차트에 수용되어 공역 내 교통 흐름이 적절하게 라우팅 된다.
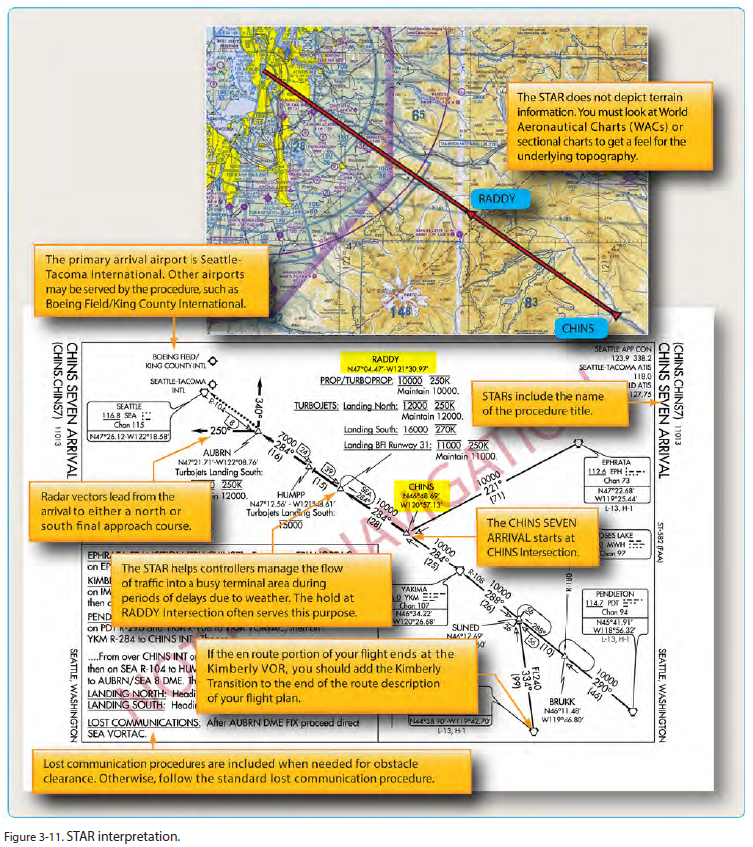
clearance를 간소화하기 위해, 그리고 주파수 혼잡을 줄이기 위해 STARs가 어떻게 사용되는지를 설명하기 위하여 다음의 arrival clearance를 고려해보자: “Cessna 32G, cleared to the Seattle/Tacoma International Airport as filed. Maintain 12,000. At the Ephrata VOR, intercept the 221° radial to CHINS Intersection. Intercept the 284° radial of the Yakima VOR to RADDY Intersection. Cross RADDY at 10,000. Continue via the Yakima 284° radial to AUBRN Intersection. Expect radar vectors to the final approach course.” [그림 3-11].
이제 terminal area에 STAR가 존재할 경우 동일한 clearance가 어떻게 발부되는지를 고려해보라. “Cessna 32G, cleared to Seattle/Tacoma International Airport as filed, then CHINS EIGHT ARRIVAL, Ephrata Transition. Maintain 10,000 feet.” 더 짧은 교신만으로도 동일한 정보를 전달할 수 있다.
조종사와 관제사 모두 무엇을 예상해야 하는지를 알고 있다면 안전성이 향상된다. 반복적인 clearances를 줄임으로써 효과적인 교신이 증가하며 관제 주파수 혼잡이 감소한다. 이를 위하여 STARs가 다음 기준에 따라 개발된다:
∙STAR는 간단하고 이해하기 쉬워야 하며 가능하면 한 페이지로 제한되어야 한다.
∙STAR transition은 다양한 형식의 항공기를 수용할 수 있어야 한다.
∙군용기와 민간 항공기가 동일한 arrival을 사용할 수 있도록 가급적 VORTAC을 사용한다.
∙가급적 DME arcs를 절차에 포함하지 않는다. 왜냐하면 IFR로 운항하는 모든 항공기가 이를 항행할 장비를 갖추지 않기 때문이다.
∙ATC가 지정하는 경우 altitude restriction과 airspeed restriction이 포함된다. [그림 3-12]
STARs는 보통 절차가 시작되는 지점에 따라 이름이 지어진다. 미국의 경우 보통 STAR가 시작되기 전에 en route transitions가 있다. 따라서 STAR의 명칭은 en route transitions가 모이는 마지막 fix와 같으며 이 지점에서 basic STAR procedure가 시작된다. 따라서 CHINS Intersection에서 시작되는 STAR는 CHINS SEVEN ARRIVAL이 된다. arrival의 상당 부분(예를 들어 NAVAID와 관련된 고도, 경로, 혹은 정보)이 수정될 경우 arrival 번호가 변경된다. 예를 들어 절차의 수정으로 인하여 CHINS SEVEN ARRIVAL은 현재 CHINS EIGHT ARRIVAL이다.
공항에 대한 STAR를 연구할 경우 조종사는 그 지역의 특정 지형을 인지할 수 있다. initial fixes를, 그리고 해당 fixes가 en route chart 상 위치하는 지점을 확인한다. 항공기를 공역 경계 내로 유지하기 위해, 혹은 장애물 회피를 위해 step-down fixes가 arrivals에 포함될 수도 있다. fix들 사이의 경로에는 courses, distances, 그리고 minimum altitudes가 포함된다. 또한 airspeed restrictions가 교통 흐름에 도움이 되는 경우 해당 사항이 표시된다. 일부 STARs는 DME 및/혹은 ATC radar를 사용하도록 요구한다. 조종사는 legend를 참조하여 차트의 기호들을 해독할 수 있다. [그림 3-13]
STAR Procedures
조종사는 clearance에서 STAR를 수락하거나, 혹은 비행계획서에 STAR를 제출할 수 있다. 항공기가 목적지 공항에 가까워졌을 때 ATC가 기존의 clearance에 STAR procedure를 추가할 수도 있다. 설령 조종사가 STAR를 요청하지 않았더라도 ATC가 STAR를 할당할 수 있다는 점을 명심하라. STAR를 사용하기 위해선 조종사는 차트를 소지해야 한다. RNAV STARs의 경우 항공기 데이터베이스로부터 절차 명칭을 통해 검색될 수 있어야 하며 차트 절차를 준수해야 한다. 만약 STAR를 사용하길 원치 않는다면 조종사는 비행계획서의 remarks section에 “No STAR”를 명시해야 한다. 또한 조종사는 ATC로부터 직접 STAR를 받았을 때 이를 거절할 수 있다.
STARs는 en route structure에서 final approach course로 향하는 transition route와 arrival route를 제공하기 위한 navigation fixes를 포함한다. 또한 해당 fix들은 final approach course 교차를 위해 radar vectors가 제공되는 fix로 이어질 수도 있다. 몇몇 STARs는 “expect” 해야 할 clearances나 restrictions를 포함할 수 있다. “expect” altitudes/airspeeds의 경우 ATC가 이를 직접 명시하기 전까지는 clearance의 일부가 아니다. arrival clearance를 받은 후 조종사는 할당받은 STAR procedure를 검토해야 하며 FMS에 적절한 절차가 로딩 되었는지를 확인해야 한다.
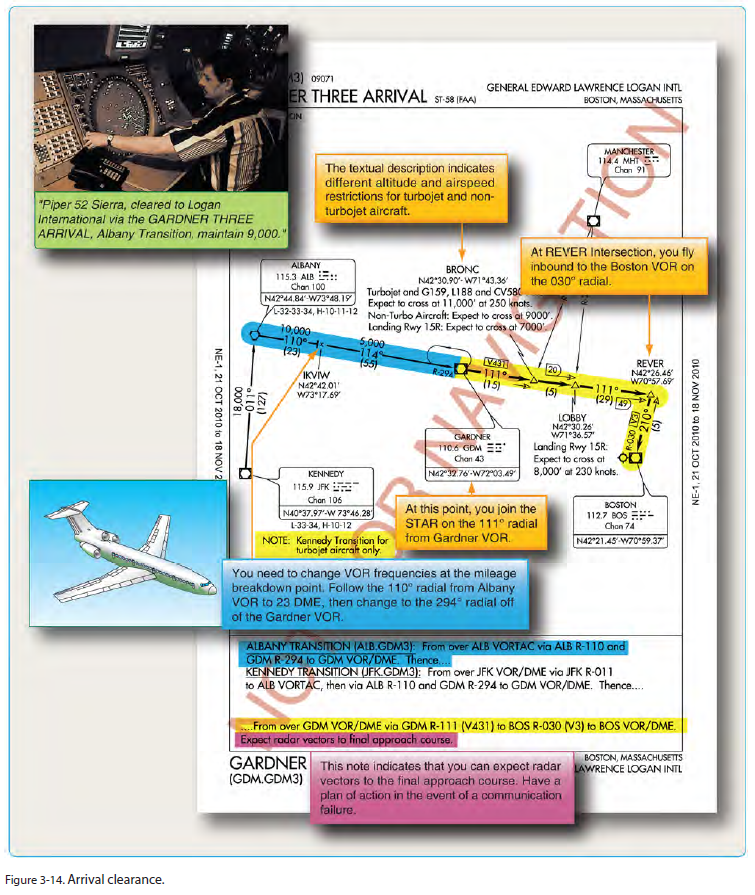
최대한 빨리 공항 및 기상 정보를 확보한다. STAR를 비행하기 전에 이러한 정보를 가지고 있는 것이 권장된다. 두 개 이상의 계기 접근 절차를 갖춘, 그리고 approach control services를 갖춘 공항에 착륙하는 경우 예상 계기 접근에 대한 사전 통지를 받는다. 이 정보는 ATIS나 관제사를 통해 전파된다. [그림 3-14] 시정이 3SM 이상이며 ceiling이 계기 접근 절차에 대해 설정된 initial approach altitudes 중 가장 높은 것 이상인 경우에는 해당 정보가 제공되지 않을 수도 있다.
radar vectors to the final approach를 갖춘 STAR procedures의 경우 STAR terminating fix에서 IAF로 향하는 경로를 찾는다. 만약 경로가 표시되어 있지 않다면 교신 두절 상황에 대비하여 STAR terminating fix에서 IAF로 향하는 사전 계획이 있어야 한다.
Reviewing the Approach
어떤 접근이 예상되는지를 결정하였다면 terminal area에 진입하기 전에 접근 차트를 자세히 검토한다. 항상 실패 접근을 수행할, 혹은 교체비행장으로 향할 가능성이 있으므로 남은 연료를 확인해야 한다. landing checklists를 미리 수행함으로써 조종사는 접근에 집중할 수 있다.
RNAV, GPS, 혹은 FMS를 사용하여 접근 절차를 설정하는 경우 하나의 활주로에 대한 여러 접근들이 데이터베이스에 어떻게 코딩되는지를 알아야 한다. 하나의 활주로에 둘 이상의 RNAV procedure가 발부된 경우 데이터베이스 내에서 이들을 구별 및 선택할 수 있는 방법이 있어야 한다. 각 절차의 명칭에는 알파벳이 포함되어 있다. 이는 Z로 시작하여 역순으로 나열된다. (접근 절차의 명명 규칙은 다음 장에서 자세히 다루어짐.) [그림 3-15]
Altitude
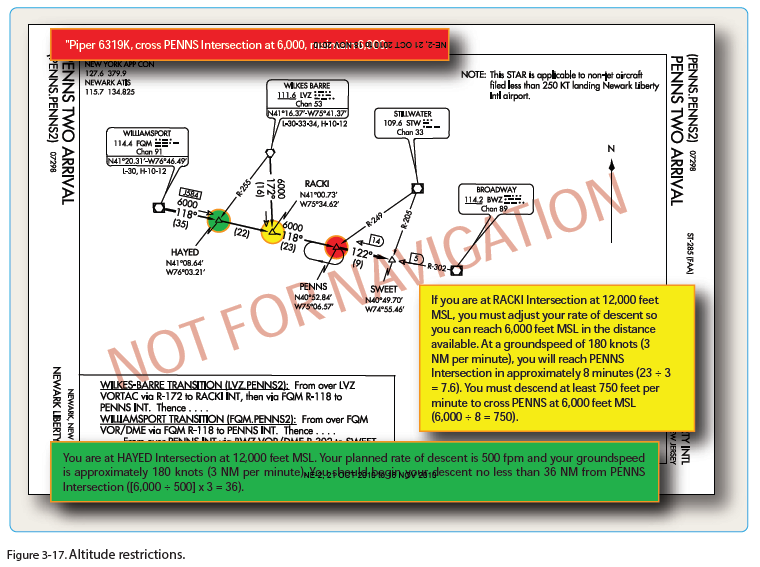
항공기가 terminal area에 도착하면 ATC는 특정 고도를 할당하거나, 혹은 “descent via” clearance를 할당한다. [그림 3-16] 조종사는 마지막으로 할당받은 고도를 떠날 수 있는 권한이 없다(단, 특별히 승인받은 경우 제외). 만약 ATC가 차트의 절차와 다른 altitude나 route를 발부할 경우 차트의 나머지 하강 절차는 취소된다. 필요한 경우 ATC는 route, altitude, 혹은 airspeed clearances를 추가로 할당한다. ATC는 crossing altitude restriction을 포함하는 descent clearance를 발부할 수도 있다. [그림 3-17] PENNS ONE ARRIVAL에서 PENNS Intersection을 6,000ft MSL로 통과하는 한 조종사는 본인의 재량에 따라 하강할 수 있다.
high altitude structure로 상승할 때 standard altimeter setting(29.92"Hg)로 변경하는 일반적인 고도는 18,000ft이다(한국의 경우 14,000ft). high altitude에서 하강하는 경우에는 FL 180을 통과할 때 고도계를 local altimeter setting으로 변경해야 한다. 허나 전 세계 대부분의 국가에서 standard altimeter setting으로 변경하는 고도와 standard altimeter setting으로부터 변경하는 고도는 각 상황마다 다르다.
예를 들어 altimeter setting을 local altimeter setting으로 변경하는 flight level은 ATC에 의해 지정된다. 이러한 정보는 미국 외의 STAR charts에 다음과 같이 표시된다: TRANS LEVEL: BY ATC. 같은 공항에서 출항하는 경우 예를 들어 5,000ft를 통과할 때 고도계를 standard setting으로 설정해야 한다. 즉, 5,000ft 너머를 비행할 때의 고도계 값은 flight levels이다. 이는 유럽에서는 일반적이다.
보통 high performance aircraft는 공항 표고로부터 10,000ft 이상에서 terminal area에 진입하며 착륙 활주로로부터 30 ~ 40NM에서 하강을 시작한다. 공항 표고로부터 5,000ft 미만으로 하강하는 것은 보통 final descent 및 glideslope/glidepath intercept가 가능한, 그리고 특정 장애물 간격 및 arrival∙approach∙landing criteria를 초과하지 않는 고도로 제한된다(단, 운영상 낮은 고도가 필요하다 조종사가 명시한 경우 제외).
arrival 지연은 보통 metering fix에서 흡수된다. 이러한 fix는 terminal airspace 바깥에 놓인 10,000ft 이상의 경로에 설정된다. metering fix는 저고도에서 관제사가 발부하는 vectors나 holding pattern보다 profile descents를 더 용이하게 만든다. descent restrictions는 보통 final approach 구간에 도달하기 전에 적용된다. 이는 목적지 공항 근처에서의 비교적 높은 하강률을 방지하기 위함이다. 공항 표고로부터 10,000ft 지점에서 initial descent를 시작하기 최소 10NM 전에 관제사는 하강 시점에 대한 advisory를 발부한다. ATC는 보통 다음과 같이 말한다: “Expect descent in (number) miles.” Standard ATC phraseology는 다음과 같다: “Maintain (altitude) until specified point (e.g., abeam landing runway end), cleared for visual approach or expect visual or contact approach clearance in (number of miles, minutes, or specified point).”
조종사가 사용할 계기 접근 절차 및 착륙 활주로가 결정되었다면 ATC는 착륙 활주로와 정렬되지 않은 다른 NAVAID로의 변경을 허용하지 않는다. 분리를 위해 altitude restrictions가 필요한 경우 ATC는 공항 표고로부터 5,000ft 미만의 고도를 할당하지 않는다.
high performance aircraft의 arrival procedures에는 여러 가지 예외가 있다. 예를 들어 non-radar environment의 경우 관제사는 착륙 활주로와 정렬되지 않은 NAVAID를 기반으로 하는 접근을 승인할 수 있다(예를 들어 circling approach). 이 경우 더 낮은 고도로의 하강은 circling approach area로 제한되며 circle-to-land maneuver는 traffic pattern으로 제한된다.
IFR en route descent procedures에는 minimum, maximum, mandatory, 그리고 recommended altitudes에 대한 검토가 포함되어야 한다. low altitude instrument approach procedures에 대한 초기 descent gradient는 500ft/NM(대략 5도)를 초과하지 않는다. high altitude approach에 대한 초기 descent gradient는 1,000ft/NM(대략 10도)를 초과하지 않는다.
arrivals 도중 계기 접근을 승인받은 경우 게재된 경로나 계기 접근 절차에 설정되기 전까지는 마지막으로 할당받은 고도를 유지해야 한다. approach clearance에 고도가 할당되지 않았으나 항공기가 이미 게재된 구간에 놓여있다면 해당 구간에 대한 minimum altitude까지 하강할 수 있다.
Airspeed
arrival 도중 관제사의 요청에 따라 속도를 조절할 수 있다. IFR 비행 계획서로 high-performance aircraft를 운항하는 경우 ATC는 적절한 교통 순서 및 분리를 위하여 속도 조절을 요청할 수 있다. 이는 terminal area에서 필요한 radar vector의 양을 줄여준다. 목적지 공항으로부터 20NM 이내를 왕복 엔진 항공기나 터보프롭 항공기가 운영 중인 경우 150knots 이상의 속도를 할당할 수 있다. 만약 할당받은 속도를 유지할 수 없다면 이를 ATC에 알려야 한다. 관제사는 전방, 혹은 후방의 항공기와 동일한 속도를 유지하라 요청할 수 있다. 조종사는 지정된 속도로부터 ±10knots를 유지해야 한다. ATC는 10노트 단위로 속도를 요청할 수 있다. 속도 조절이 더 이상 필요하지 않은 경우 ATC는 조종사에게 “...resume normal speed”라 알린다.
속도 조절 중에도 14 CFR Part 91.117이 적용된다는 것을 명심해야 한다. 할당받은 속도 조절이 이러한 한계를 초과할 경우 조종사는 이를 ATC에 알려야 한다. Class C/D 공역의 primary airport로부터 4NM 이내에서 2,500ft AGL 이하를 운항하는 경우 ATC는 14 CFR Part 91.117에서 명시하는 속도보다 빠른 속도를 승인할 권한이 있다.
10,000ft MSL 이상에서 250KIAS를 초과하는 속도를 할당받은 항공기가 10,000ft MSL 미만으로 승인된 경우 조종사는 14 CFR Part 91.117(a)을 준수하기 위하여 속도를 250KIAS로 줄여야 한다. 이러한 속도 조절은 ATC에 알리지 않아도 된다. 조종사는 14 CFR Part 91.117의 다른 조항들도 준수해야 한다(이 또한 ATC에 알리지 않아도 됨). 예를 들어 고속 항공기가 10,000ft MSL에서 수평을 유지하면서 250KIAS로 감속한 다음 2,500ft AGL에서 수평을 유지하면서 200KIAS로 감속하는 것은 일반적이다. 관제사는 이러한 행동들을 예상하고 그에 따라 계획을 수립한다.
B등급 공역의 아래에서 조종사는 14 CFR Part 91, § 91.117(c)에서 명시하는 200KIAS 제한을 준수해야 한다. approach clearances는 이전에 할당하였던 속도 조절을 취소한다.
Holding Patterns
ATC로부터 further clearance를 받기 전에 clearance limit에 도달한 경우 마지막으로 할당받은 고도에서 holding pattern을 수행해야 한다. 관제사는 다양한 이유(기상 악화, 혹은 많은 항적)로 체공을 지시한다. 또한 실패 접근 이후에 체공이 필요할 수도 있다. holding pattern을 위해 마련된 구역 바깥으로 비행할 경우 지형이나 다른 항적과의 충돌이 발생할 수 있다. 따라서 조종사는 holding pattern이 제공하는 protected airspace의 크기를 알아야 한다. 각 holding pattern은 fix, fix로부터 체공하는 방향, 그리고 항공기가 체공할 airway∙bearing∙course∙radial∙route를 가진다. 이러한 요소들과 선회 방향이 holding pattern을 규정한다.
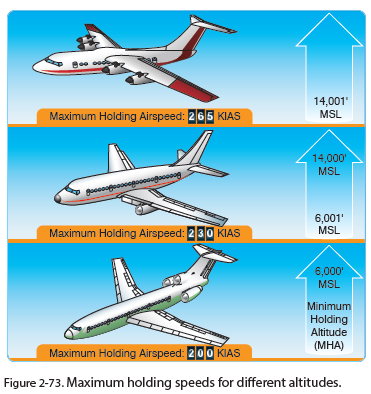
항공기의 속도는 holding pattern의 크기에 영향을 미친다. 따라서 protected airspace의 크기를 제한하기 위하여 maximum holding airspeeds가 지정되었다. 세 가지 속도 제한이 그림 2-73에 나타나 있다. 일부 holding patterns는 고속 항공기가 protected area로부터 벗어나는 것을 방지하기 위하여 추가적인 속도 제한을 가지고 있다. 이러한 사항들은 차트에 아이콘 및 제한 속도로 표시된다.
DME나 GPS는 체공을 위한 몇 가지 추가 선택지를 제공한다. DME/GPS holding patterns의 leg length는 시간이 아닌 거리(NM)를 기반으로 한다. 이러한 holding patterns는 conventional holding patterns와 동일한 체공 절차를 사용한다. 계기 접근 차트나 관제사는 outbound leg의 길이를 지정한다. outbound leg의 끝부분은 DME, 혹은 ATD(along track distance) 값을 통해 결정된다. holding pattern은 특정 course나 radial을 기준으로 하며 inbound end와 outbound end는 DME station으로부터 측정된다. holding distance가 명시된 GPS overlay procedure나 GPS standalone procedure의 경우 holding fix는 데이터베이스 내의 waypoint이며 outbound leg의 끝부분은 ATD를 통해 결정된다. 일부 FMS는 inbound leg의 길이가 차트에 표시된 outbound leg 길이와 일치하도록 inbound turn을 시작하게 되어있다.
강한 바람이 holding pattern의 크기를 크게 만들 수도 있다. holding entry procedures와 leg lengths가 holding pattern과 일치하는지를 확인하기 위해선 항공기의 FMS holding program을 이해해야 한다. 경우에 따라 protected airspace 내에 머무르기 위해 조종사 개입이 필요할 수도 있다. [그림 3-18]
Approach Clearance
approach clearance는 조종사가 접근을 수행할 수 있는 위치에 대한 지침을 제공한다. 또한 이는 해당 접근을 비행하는 clearance이다. 오직 하나의 접근 절차만이 존재하는 경우, 혹은 조종사가 원하는 접근 절차를 수행하도록 승인된 경우 clearance는 “...cleared for approach.”라 간단히 표현될 수 있다. 조종사에게 특정 접근을 할당하는 경우 ATC는 clearance에 접근의 명칭을 지정한다. 예를 들어, “...cleared ILS Runway 35 Right approach.”
현재 수행 중인 접근과 정렬되지 않은 활주로에 착륙해야 하는 경우 관제사는 다음과 같은 circling approach clearance를 발부할 수 있다: “...cleared for VOR Runway 17 approach, circle to land Runway 23.” final approach segment가 landing runway alignment와 30도 이상 차이나는 접근은 항상 circling approaches로 지정된다. approach clearance에 특정 착륙 활주로가 지정되지 않는 한 조종사는 어느 활주로에든 착륙할 수 있다.
holding fix에 도달하기 전에 접근을 승인받은 경우 조종사는 holding fix로 계속 진행한 다음 해당 fix와 연결된 feeder route를 따라 IAF로 향해야 한다. 만약 IAF로 향하는 feeder route가 holding fix 이전의 fix에서 시작되는 상황에서 접근을 승인받았다면 조종사는 feeder route를 통해 접근을 시작해야 한다. 만약 IAF가 holding fix로 향하는 경로를 따라 위치한다면 IAF에서 접근을 시작해야 한다.
또한 ATC는 “direct”, 혹은 “proceed direct”이라는 표현을 사용하여 항공기를 IAF로 직접 승인할 수 있다. 관제사는 보통 접근 절차의 명칭을 통해 접근을 식별한다(설령 접근 보조 장치의 일부 요소(예를 들어 ILS의 glideslope)가 작동하지 않거나 신뢰할 수 없다 하여도). 대신 approach clearance 발부 시 해당 요소를 사용할 수 없음을 조종사에게 알린다.
Present Position Direct
arrivals를 위한 자원으로 high/low altitude en route charts 외에도 area charts가 유용할 수 있다. ATC가 특정 fix로 진행하라 승인한 후 해당 fix의 위치를 찾는데 area chart가 도움이 될 수 있다(특히 익숙하지 않은 공항에서).
조종사가 V295를 따라 Palm Beach International Airport로 향하고 있다고 가정하자. [그림 3-19 및 3-20] 관제사는 조종사로 하여금 현 위치에서 ZISUR(IAF)로 직접 향하도록 승인하였다. 현 위치와 접근 시설 사이에 transition은 존재하지 않는다. 조종사가 이동하려는 경로에 대해 게재된 minimum altitude는 없다.
조종사가 HEATT Intersection의 북쪽에서 5,000ft 상공에 있을 때 접근 관제사가 다음과 같이 말하였다: “Citation 9724J, two miles from HEATT, cleared present position direct ZISUR, cleared for the Palm Beach ILS Runway 10L Approach, contact Palm Beach Tower on 119.1 established inbound.” 현재 위치에서 ZISUR intersection까지의 minimum altitude가 없으므로 조종사는 IAF에 도달하기 전까지는 마지막으로 할당받은 고도를 유지해야 한다. ZISUR intersection outbound를 통과한 후에는 course reversal을 위하여 2,000ft로 하강을 시작한다. ILS procedure는 approach segment에 “established” 되기 전까지 마지막으로 할당받은 고도를 유지해야 하는 조종사 제한을 관제사가 인지하는 것이 매우 중요하다. approach clearance를 발부하기 전에 관제사는 보통 final approach course에 설정되기 전까지 유지해야 할 고도를 조종사에게 할당한다.
Radar Vectors to Final Approach Course
입항 항공기는 다음 중 하나가 발생하지 않는 한 approach gate로부터 2NM 지점 바깥쪽에서 final approach course를 교차하도록 vector 된다:
1. ceiling이 minimum vectoring altitude나 minimum IFR altitude보다500ft 이상 높으며 시정이 3NM 이상인 경우에는 approach gate로부터 2NM 지점 안쪽에서, 허나 approach gate 바깥쪽에서 final approach course가 교차되도록 vector될 수 있다(해당 공항에 기상 보고가 존재하지 않는 경우에는 pilot report가 이용될 수도 있음).
2. 조종사가 특별히 요청하는 경우 항공기는 approach gate 안쪽에서, 허나 FAF(final approach fix) 바깥쪽에서 final approach course가 교차되도록 vector될 수 있다.
(그림 출처: IFR Magazine)
정밀 접근의 경우 항공기는 glideslope/glidepath 이하의, 혹은 minimum glideslope/glidepath intercept altitude 이상의 고도로 vector 된다. 비정밀 접근의 경우 항공기는 차트의 절차에 따라 하강할 수 있는 고도로 vector 된다.
vectors가 final approach course를 교차하는 경우 ATC는 이 사실과 그 이유를 조종사에게 알린다(예를 들어, “… expect vectors across final for spacing”). 이러한 사실을 받지 못한 경우 조종사는 approach clearance를 발부받지 않는 한 final approach course로 선회해서는 안 된다.
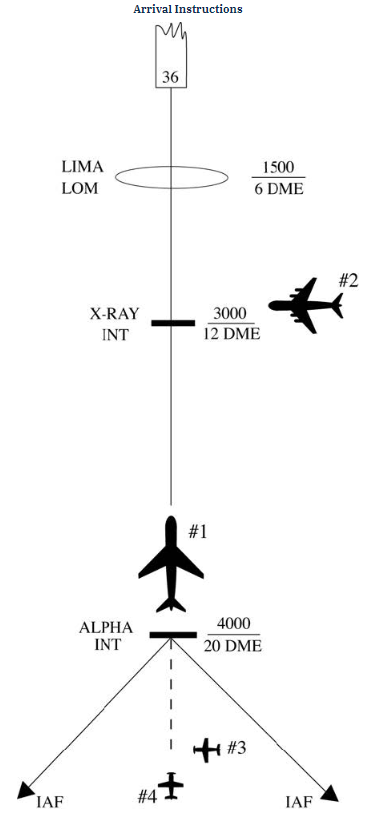
IFR 항공기가 approach gate에 도달하기 전에 다음과 같은 ATC arrival instructions가 발부된다:
1. final approach course에 놓인 특정 fix로부터의 항공기 위치(관제사의 레이더 화면에 아무것도 표시되지 않는 경우, 혹은 계기 접근 절차에 아무것도 규정되지 않은 경우에는 공항으로부터의 위치를, 혹은 final approach guidance를 제공하는 NAVAID로부터의 위치를 발부함).
2. 필요한 경우 final approach course를 교차하기 위한 vector.
3. approach clearance(단, radar approach를 수행하는 경우 제외). 항공기가 차트의 경로나 계기 접근 절차에 설정된 후에, 혹은 차트의 경로나 계기 접근 절차에 설정되기 전까지 유지해야 할 고도를 할당한 후에 approach clearance가 발부된다(조종사는 approach clearance를 발부받아야 하강을 수행할 수 있다).
(그림 출처: FAA Order JO 7110.65)
Aircraft 1은 final approach course로 vector 되었으나 clearance는 아직 받지 못한 상태이다. 항공기는 이제 4,000ft에 있으며 계기 접근 절차에 설정되었다. “Seven miles from X-RAY. Cleared ILS runway three six approach.”
Aircraft 2는 LIMA로부터 4NM 떨어진 지점에서 final approach course로 vector 되는 중이다. 해당 영역의 minimum vectoring altitude는 2,000ft이다. “Four miles from LIMA. Turn right heading three four zero. Maintain two thousand until established on the localizer. Cleared ILS runway three six approach.”
Aircraft 3은 approach segments 너머에서 final approach course로 vector 되는 중이다. 해당 영역의 minimum vectoring altitude는 4,000ft이다. “Five miles from Alpha. Turn right heading three three zero. Cross Alpha at or above four thousand. Cleared I-L-S runway three six approach.” 이를 통해 조종사는 비행해야 할 고도를, 그리고 minimum altitudes나 step-down altitudes로 하강을 시작할 수 있는 지점을 정확하게 알 수 있다.
Aircraft 4는 approach segments너머에서(Alpha로부터8NM지점에서) final approach course에 설정되어 있다.해당 영역의minimum vectoring altitude는4,000ft이다. “Eight miles from Alpha. Cross Alpha at or above four thousand. Cleared ILS runway three six approach.”
대부분의 항공기는intermediate fix와approach gate사이의final approach course로vector된다.이러한 항공기는 보통 접근 구간에 설정되기 전까지는 고도를 유지하라 지시받는다. ATC가 할당하는 고도는 approach clearance가 발부된 시점으로부터 차트에 게재된 경로나 계기 접근 절차에 설정되기 전까지 IFR 장애물 회피를 보장한다. 간혹 IAP에 initial segment가 없어서 vectors가 필요한 때가 있는데이 경우에는 차트의 plan view에 “RADAR REQUIRED”가 표시된다.
ATC는 항공기가 FAF를 통과하기 전에 주파수 변경을 수행하려 시도한다. 허나 레이더를 통해 FAF가 식별되는 경우에는 항공기가 fix 상공임을 통지한 후에 주파수 변경을 알린다. 예를 들어, “Three miles from final approach fix. Turn left heading zero one zero. Maintain two thousand until established on the localizer. Cleared ILS runway three six approach. I will advise when over the fix.” ... “Over final approach fix. Contact tower one-one eight point one.”
arrivals에 도움이 되는 추가 자료들을 참조하는 것은 중요하다(특히 특별한 조종사 자격이나 항법 자격을 필요로 하는 낯선 공항의 경우). domestic/flag air carriers에 적용되는 운영 규정에 따라 PIC는 정기 운항이 이루어지는 경로 및 공항에 대한 자격을 갖추어야 한다. 여기에는 특별한 조종사 자격이나 특별한 항법 자격을 필요로 하는 지역, 경로, 그리고 공항이 포함된다. 14 CFR Part 121.443에 따라 운항하는 part 119 자격 소지자들의 경우 이러한 규정을 준수할 수 있는 조항들이 운영기준에 명시되어 있다. 그림 3-27은 미국 내 몇몇 special airports와 관련 설명을 제공한다.