항공업계에서 가장 큰 안전 문제 중 하나는 지상 이동 사고 있다. 이에 따라 FAA는 유도로 정보와 활주로 정보를 FAA 간행물에 추가하는 등 조종사가 이용할 수 있는 정보를 확대하였다. 또한 FAA는 새로운 절차를 시행하였으며 조종사, ATC, 그리고 지상 직원을 위한 교육 프로그램을 만들었다.
Airport Sketches and Diagrams
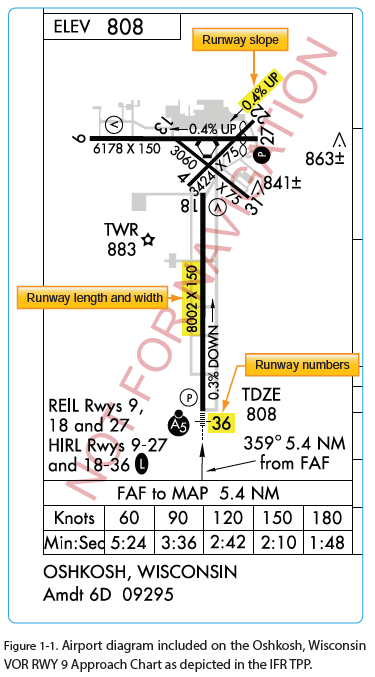
airport sketches와 airport diagrams는 공항 레이아웃을 그림으로 보여준다. Aeronautical Information Services는 모든 계기 접근 차트의 좌측, 혹은 우측 하단에 airport sketch를 제공한다. [그림 1-1] 이는 활주로, 활주로, 길이, 폭, 경사도, touchdown zone elevation, end of the runway에 설치된 등화 시스템, 그리고 유도로를 표시한다.
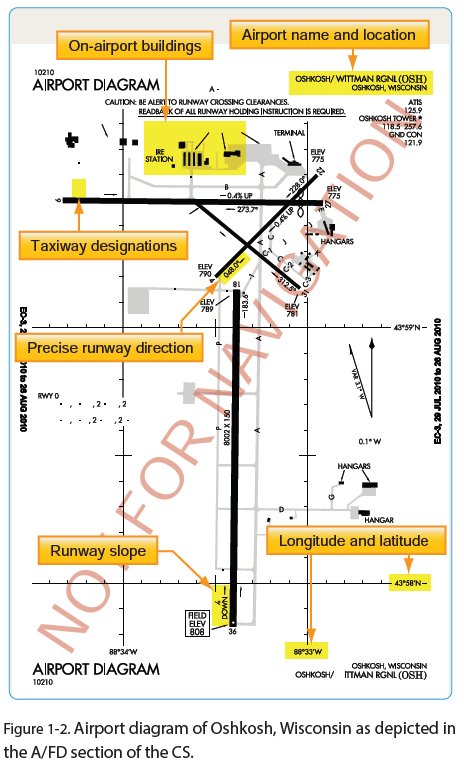
항적이 많거나 활주로 배치가 복잡한 일부 공항의 경우 Aeronautical Information Services는 airport diagram도 발행한다. 이는 IFR TPP 책자에 표시되어 있다. airport diagram은 airport sketch의 특징들에 추가 정보들(예를 들어 유도로 식별자, 공항 위도/경도, 그리고 건물)이 더해진 전면 그림이다. [그림 1-2]
Chart Supplements(CS)
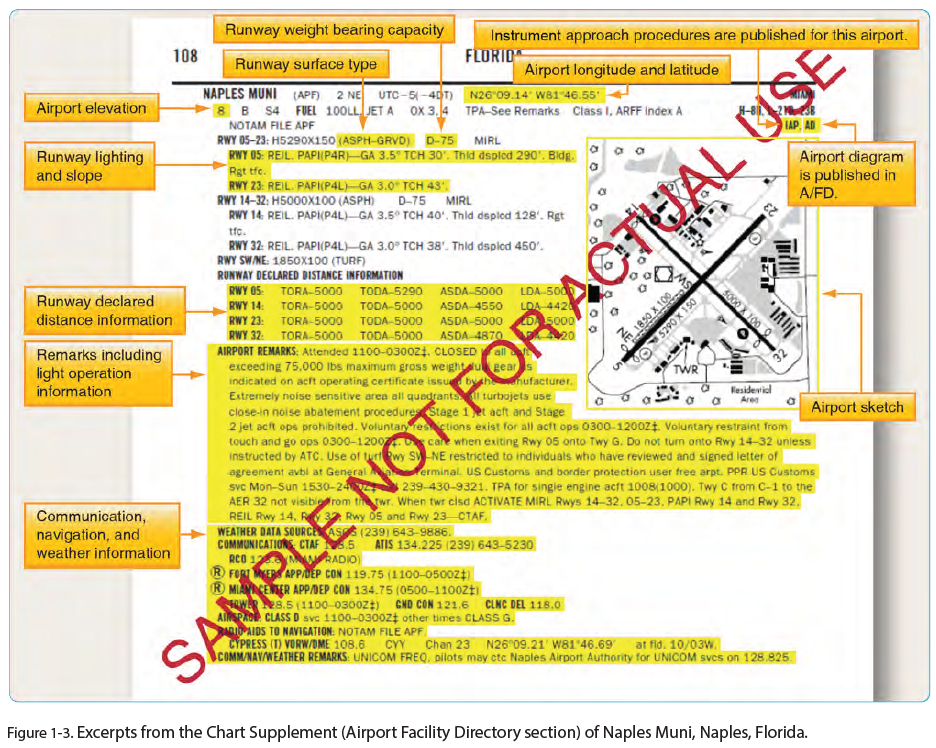
CS와 d-CS(digital Chart Supplement)는 모든 공항에 대한 텍스트 정보와 그래픽 정보를 제공한다. CS의 A/FD(Airport/Facility Directory) section은 활주로 길이 및 폭, 활주로 표면, 지지 용량, 활주로 경사, runway declared distances, 공항 서비스, 그리고 hazards(예를 들어 조류와 저시정). [그림 1-3] VFR 조종사들의 지상 이동을 지원하기 위하여 airport sketches도 추가되고 있다. FAA Runway Incursion Program을 지원하기 위하여 airport diagrams와 “Hot Spot” locations가 A/FD section에 포함되어 있다.
Surface Movement Guidance Control System(SMGCS)
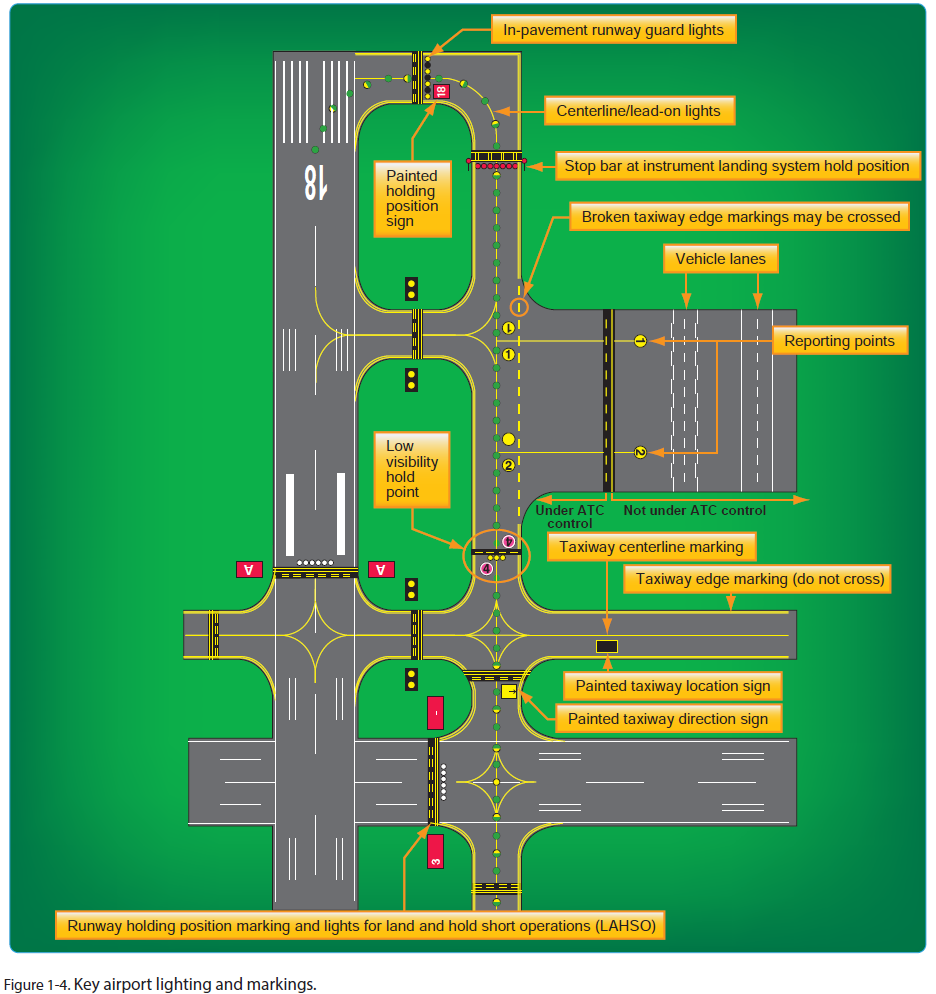
SMGCS low visibility taxi plan은 taxiway/runway signs∙markings∙lighting의 개선, 그리고 SMGCS visual aid diagram의 발행을 포함한다. [그림 1-4] 또한 해당 계획은 taxi routes를, 그리고 이와 관련된 시설 및 장비를 설명해야 한다. SMGCS program의 일부에는 다음이 포함된다:
∙Controllable Stop bars lights – 이는 ATC가 제어할 수 있는 적색 등화이다. 해당 등화는 takeoff operations 도중 runway incursions를 방지한다. 500ft RVR 미만에서는 해당 등화가 필요하다.
∙Non-controllable Stop bars lights – 이는 이동의 제한이 필요한 교차로에 설치되는 적색 등화이다. 500ft RVR 미만에서 해당 등화는 계속 작동해야 한다.
∙Taxiway centerline lead-on-lights – 이는 저시정, 그리고 야간 도중 지상 교통을 안내한다. 해당 등화는 녹색과 노란색이 번갈아서 배치된다.
∙Runway guard lights – 이는 활주로로 진입할 수 있는 모든 유도로에 설치될 수 있다. 해당 등화는 번갈아서 깜박이는 황색 등화로 구성된다. 이는 활주로가 존재함을 나타내며 runway holding position marking의 위치를 식별한다.
∙Geographic position markings – ATC는 geographic position markings를 통해 항공기의 위치를 확인한다. 이는 대기 지점으로 사용되거나, 혹은 위치 보고에 사용될 수 있다. 해당 지점(“pink spots”)은 검정색 원과 흰색 원으로 윤곽을 갖추고 있으며 숫자나 영숫자가 지정되어 있다.
∙Clearance bar lights – 항공기의 대기 지점을 나타내기 위하여 사용되는 세 개의 황색 등화이다. 이는 geographic position markings와 함께 배치된다.
Part 121/135 operators는 특정 공항에서 시행되는 SMGCS plan을 준수해야 한다. SMGCS plan에 따라 운항하는 모든 조종사들은 해당 공항의 low visibility taxi route chart를 소지해야 한다. 해당 차트는 저시정 운영과 관련된 taxi routes를, 그리고 기타 세부 정보를 요약한다. Part 91 operators는 AC 120-57에서 명시하는 지침들을 준수해야 하며 저시정 운영 도중 “Follow Me” 서비스를 예상해야 한다. 공항 운영에 악영향을 미칠 수 있는 모든 SMGCS 중단이 NOTAM으로 발행된다.
Advanced Surface Movement Guidance Control System(A-SMGCS)
FAA는 여러 공항에 ASDE-X(Airport Surface Detection Equipment-Model X), 그리고 A-SMGCS와 같은 활주로 안전 시스템을 구현하였다. 이러한 시스템들은 surface movement radar, 그리고 aircraft transponders가 제공하는 정보들을 사용한다. 이를 통해 시스템은 airport movement area에 위치한 항공기의 위치 및 식별부호를 파악하며 활주로/유도로에서의 충돌 가능성을 줄여준다.
Airport Signs, Lighting, and Markings
조종사들은 상황인식을 유지하기 위하여 airport lighting, markings, 그리고 signs를 사용한다. 이러한 시각 보조 장치들은 항공기 위치, 사용 중인 유도로, 사용될 활주로 입구에 대한 정보를 제공한다. 이러한 정보를 간과할 경우 지상 사고가 발생할 수 있다. 만약 익숙하지 않은 markings나 lighting을 마주하였다면 ATC에 문의한다. 그리고 필요하다면 progressive taxi instructions를 요청한다.
Runway Incursions
FAA는 runway incursion을 다음과 같이 정의한다: “항공기의 이착륙을 위해 지정된 지표면의 보호 구역에 항공기, 차량, 혹은 사람이 잘못 진입하여 발생하는 모든 사건.”
runway incursions에는 네 가지 유형이 있다:
∙Category A – 충돌을 간신히 피한 심각한 사고.
∙Category B – 충돌을 피할 수 있는 시간 및/혹은 거리가 충분하지 못한 사고.
∙Category C – 충돌을 피할 수 있는 시간 및/혹은 거리가 충분한 사고.
∙Category D – runway incursion의 정의는 만족하지만 즉각적인 안전에 영향을 미치지 않는 사고.
그림 1-5는 runway incursion에 연루될 가능성을 줄여주는 몇 가지 단계들을 강조한다.
또한 FAA는 runway incursions 및 그 외 지상 이동 문제를 줄이기 위하여 runway hotspots를 식별하였고, standardized taxi routes를 설계하였으며, Runway Safety Program을 도입하였다.
Runway Hotspots
ICAO는 hotspots를 다음과 같이 정의한다: 충돌이나 runway incursion이 발생했었던, 혹은 잠재적 위험이 존재하는 aerodrome movement area상 위치. hotspots는 지상 이동을 어렵게 만들 수 있는 복잡한 유도로를 알려준다. 이유가 무엇이든 조종사는 이러한 교차로가 존재한다는 것을 인지해야 하며 이러한 교차로에 접근할 때 더 주의를 기울여야 한다. hotstpots는 일부 공항 차트에 동그라미로 표시된다. [그림 1-6]
Standardized Taxi Routes
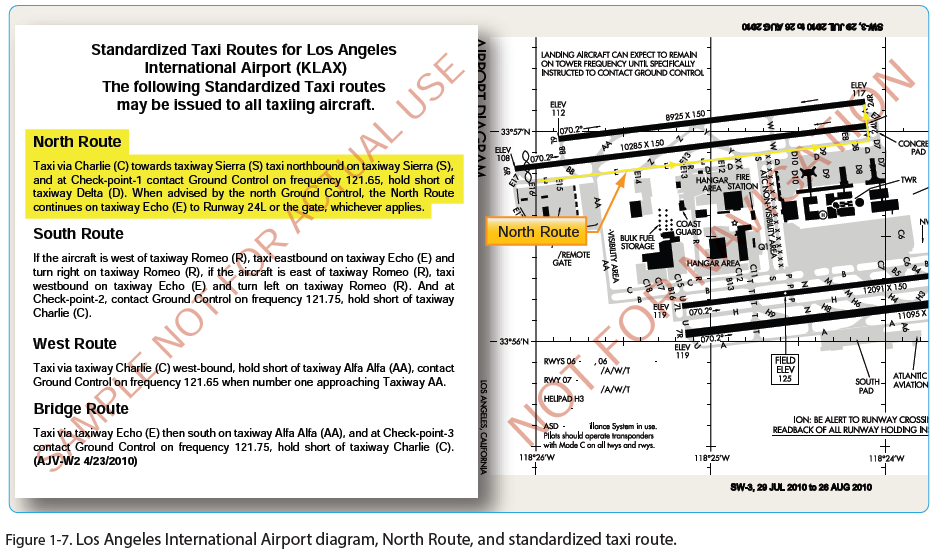
standard taxi routes는 항적이 많은 공항의 지상 이동을 개선한다. 이러한 공항에서는 게이트와 활주로 사이를 이동하는데 사용되는 전형적인 taxiway traffic patterns가 설계된다. ATCS(ATC specialist)는 조종사를 특정 경로로 승인함으로써 무선 교신 시간을 줄이며 taxi instruction 오해 가능성을 없앤다. KLAX의 North Route가 그 예시이다. [그림 1-7] 이러한 경로는 ground control로부터 발부되며 만약 이를 준수할 수 없다면 조종사는 initial contact시 이를 알려야 한다. 어떠한 이유로든 taxi route를 잘 모르겠다면 조종사는 progressive taxi instructions를 요청해야 한다. 또한 관제사가 항적, 폐쇄 유도로, 공항 공사 등으로 인하여 필요하다 판단하는 경우에도 progressive taxi instructions가 제공된다. 특정 공항에 preplanned taxi routes가 존재하는지를 파악하고, 해당 경로들을 숙지하며, taxi descriptions를 소지하는 것은 조종사의 책임이다.
Taxi and Movement Operations Change
2010년 6월 30일부로 관제사는 taxi route와 교차하는 각 활주로를 횡단하라는, 혹은 대기하라는 explicit instructions를 발부해야 한다. 다음은 이러한 절차적 변경 사항을 요약한 것이다:
∙takeoff runway를 향하여 taxi instructions를 발부할 때 “taxi to”라는 용어가 더 이상 사용되지 않는다.
∙활주로를 횡단하는 instructions는 한 번에 하나씩 발부된다. 다수의 활주로들을 횡단하라는 instructions는 발부되지 않는다. 다른 활주로를 횡단하라는 instructions를 발부받기 전에 이전 활주로를 반드시 횡단해야 한다. 이는 모든 활주로(inactive runway와 closed runway 포함)에서 적용된다.
∙explicit ATC instructions 없이는 runway hold marking을 건너지 않는다. 의심스러운 점이 있다면 질문하라!
어떠한 비행 구간에서든 기계적 고장이 발생하면 매우 위험할 수 있다. 허나 계기비행 기상상태에서 이륙할 때 발생하는 고장은 특히나 더 위험하다. 비상 상황이 발생하였다면 출항 공항으로 되돌아올지이륙교체비행장으로 향할지 결정해야 한다. 만약 출항 공항의 기상이 착륙 최저치보다 낮다면 출항 공항으로 되돌아갈 수 없으며 이륙교체비행장으로 향하는 몇몇 선택지만이 남는다.
초창기에는 commercial operators의 착륙 최저치가 보통 이륙 최저치보다 낮았다. 따라서 공항에 착륙한 후에 해당 공항으로부터 출항할 수 없는 경우가 있었다. 또한 한때는 모든 이륙 최저치에visibility 조건뿐만 아니라 ceiling 조건도 있었다. 오늘날 이륙 최저치는 보통 착륙 최저치보다 낮으며 출항 영역의 장애물을 see and avoid 해야 하는 경우에만 이륙 최저치에 ceiling 조건이 포함된다.
FAA는 Standard Instrument Approaches를 갖춘 모든 공항에 이륙 최저치를 설정하였다. 이러한 최저치들은commercially operated aircraft(즉, Part 121/135 operators)가 사용한다. 최저치가 설정되지 않은 공항에서는 표준 최저치가 적용되어야 한다: 한 개/두 개의 엔진을 갖춘 항공기의 경우 1SM, 그리고 세 개 이상의 엔진을 갖춘 항공기의 경우 1/2SM.
14 CFR Part 91에 따라 운항하는 항공기는 이러한 이륙 최저치를 준수하지 않아도 된다. 해당 항공기는 법적으로 zero/zero departure가 가능하다. 허나 이는 결코 권장되지 않는다.
Aeronautical Information Services charts는 비표준 최저치를 갖춘 활주로의 이륙 최저치만을 나열한다. 공항이 비표준 비표준 이륙 최저치를 갖추고 있다면 계기 접근 차트의 notes sections에 다음 기호가 표시된다.
일부 departure procedures는 특정 항공기 성능 조건이 만족된다면 표준 최저치로 출항하도록 허용한다. [그림 1-8]
Takeoff Minimums for Commercial Operators
주로 Part 121/135 operators가 이륙 최저치를 사용하긴 하지만 이들은 본인의 운영기준(OpSpecs)에 따라 alternative takeoff minimums를 사용할 수도 있다. 필수 장비와 조종사 교육을 갖추었다면 Part 121/135 operators는 이러한 운영기준을 통해 lower-than-standard minimums로 출항할 수 있다.
(출처: 대한항공 계기비행 교재)
Operations Specifications(OpSpecs)
항공운송업계는 다양한 변수들을 수용하기 위하여 안전 기준을 설정 및 관리해야 한다. 이러한 변수들에는 다양한 항공기, 다양한 운영자, 다양한 상황, 그리고 항공 기술의 빠른 변화가 포함된다. 모든 유형의 상황에 대한 규정을 공표함으로써 이러한 변수들을 해결하는 것은 비현실적이다. 빠르게 변화하는 항공 기술을 규정으로 해결하는 것 또한 비현실적이다. 규정을 통해 모든 변수와 상황을 해결한다면 해당 규정이 매우 복잡할 것이다. 따라서 규정에 의해 설정된 안전 기준이 광범위한 적용 범위를 갖춤으로써 다양한 준수 방법을 허용해야 한다. 운영기준은 다양한 변수들을 다루는 안전 기준을 설정하는데 있어 효과적인 방법을 제공한다. 또한 항공기의 등급 및 크기, 그리고 운항 유형 및 종류에 따라 운영기준을 조정할 수도 있다.
Part 121/135 operators는 운영기준을 통해 lower than standard takeoff minimums를 사용할 수 있다. 특정 항공기 형식에 설치된 장비, 조종사 훈련, 그리고 특정 공항에 설치된 장비 유형에 따라 Part 121/135 operators는 300ft RVR에서도 이륙할 수 있다.
(출처: 국토교통부 국토교통상식)
Ceiling and Visibility Requirements
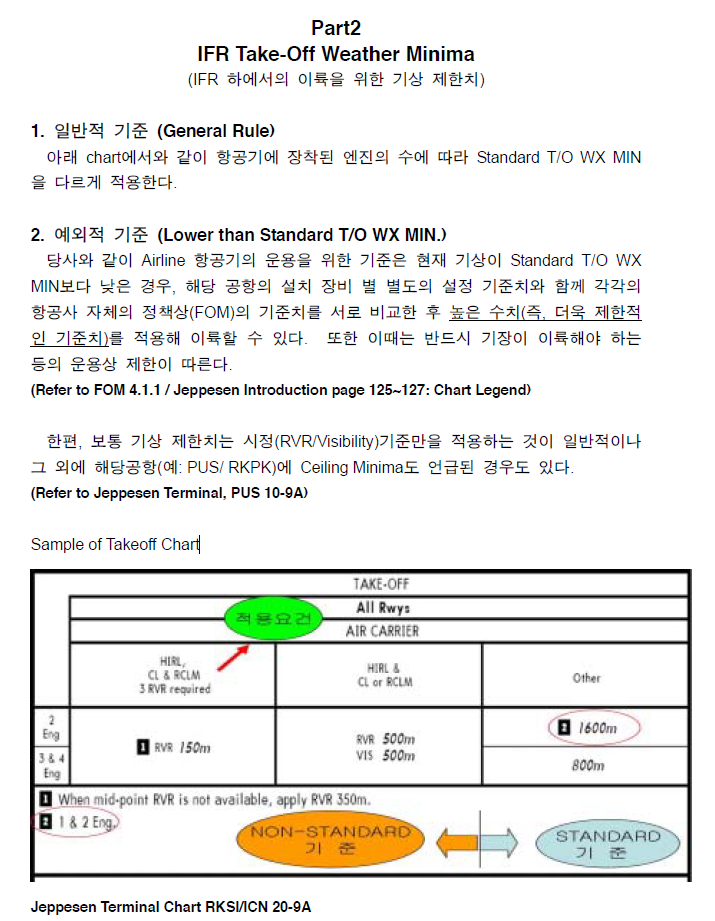
모든 takeoffs/departures 절차는 시정 최저치를 가지고 있다. 시정 정보가 보고되는 방법은 매우 다양하며 이러한 정보가 배포되는 방법도 다양하다. 조종사들은 출항 전에 항상 기상 정보(ceiling/visibility 정보 포함)를 확인해야 한다. 현재의 시정 정보를 확인하기 전까지는 IFR 비행을 시작하지 않는다. 만약 차트에 ceiling minimum과 visibility minimum이 지정되어 있다면 두 가지 모두가 적용된다.
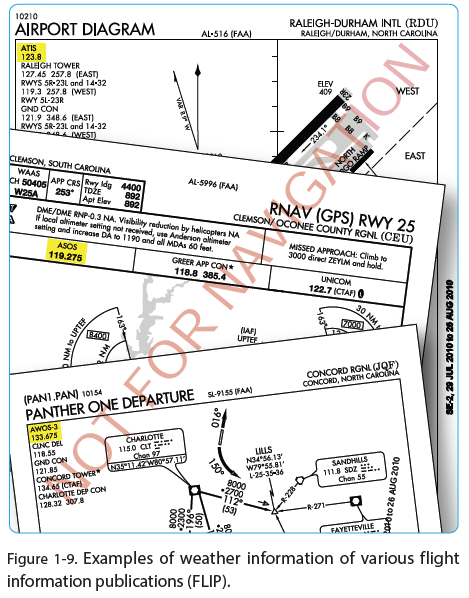
특정 공항에 대한 기상 관측 시설은 Chart Supplement를 통해 확인할 수 있다. weather sources의 전화번호와 주파수가 공항별로 나열되어 있다. weather sources(예를 들어 ATIS, D-ATIS, AWOS, ASOS, 그리고 AFSS)를 위한 주파수는 접근 차트에도 게재되어 있다. [그림 1-9]
Visibility
낮에 조명을 갖추지 아니한 물체를 식별할 수 있는 능력과 밤에 조명을 갖춘 물체를 식별할 수 있는 능력을 시정이라 부른다. 시정은 statute miles, hundreds of feet, 혹은 meters로 보고된다.
Prevailing Visibility
우세 시정은 수평원의 절반(이 절반이 반드시 연속될 필요는 없음) 이상을 차지하는 가장 높은 수평 시정을 의미한다. 우세 시정은 statute miles로 보고된다.
(출처: Skybrary)
Runway Visibility Value(RVV)
RVV는 transmissometer를 통해 특정 활주로에 대해 결정된 시정이다. 해당 장치는 활주로 시정(SM)을 지속적으로 나타낸다. 특정 활주로에 대한 최저치 결정 시 RVV가 우세 시정 대신 사용된다.
Tower Visibility
tower visibility는 관제탑에서 결정된 우세 시정을 의미한다.
Runway Visual Range(RVR)
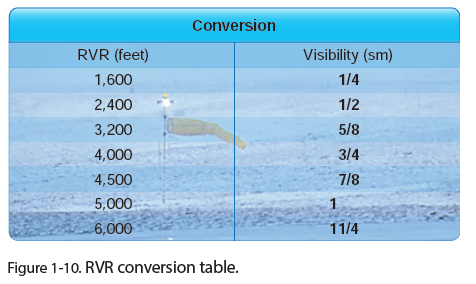
활주로가시거리는 high intensity runway lights나 기타 대상의 시각적 대비 중 더 높은 시정을 산출하는 것을 기준으로 한다. RVR의 경우 prevailing visibility나 runway visibility와는 달리 이동 중인 항공기의 조종사가 활주로를 따라 볼 수 있는 것을 기준으로 한다. RVR은 경사 거리가 아닌 수평 거리이다. RVR은 100ft 단위로 보고된다. 따라서 SM 단위의 시정이 보고되지 않은 경우에는 RVR을 SM으로 변환해야 한다. [그림 1-10] RVR은 활주로 touchdown point 근처의 transmissometer에서 측정된 값을 기초로 한다. 특정 활주로에 대한 최저치 결정 시 RVR이RVV 및/혹은 prevailing visibility 대신 사용된다.
다음은 RVR의 유형들이다:
∙Touchdown RVR – runway touchdown zone 근처에 위치한 RVR 장비에서 얻은 RVR 값.
∙Mid-RVR – runway midpoint 근처에 위치한 RVR 장비에서 얻은 RVR 값.
∙Rollout RVR – rollout end of the runway 근처에 위치한 RVR 장비에서 얻은 RVR 값.
∙Far End RVR – 4개의 RVR VS(visibility sensors)가 설치된 경우 far end RVR VS는 활주로 반대편에 위치한 touchdown RVR VS이다. far end sensor는 추가 정보를 제공한다.
(출처: boldmethod)
RVR은 Part 121/135 operators가 사용하는 주된 시정으로 이는 각 운영자의 운영기준에서 명시하는 특정 visibility reports and controlling values와 함께 사용된다. 계기 출항을 수행하기 위해선 본인의 운영기준에 따른 특정 RVR 보고를 가지고 있어야 한다. 또한 운영기준은 출항 상황에 따라 어떤 시정 보고가 기준이 되는지도 명시한다.
Adequate Visual Reference
Part 121/135 operations 도중 해당 운영기준에서 명시하는 대로 lower-than-standard takeoff minimums를 사용할 수 있다. 특정 유형의 시정 보고를 사용할 수 없거나 특정 장비가 작동하지 않으나 만약 조종사가 적절한 시각 참조물을 확인할 수 있다면 이륙이 가능하다. 이륙 활주 도중 이륙 표면이 지속적으로 식별되고 방향 제어가 유지되도록 적절한 시각 보조 장치가 사용되어야 한다.적절한 시각 보조 장치에는 high intensity runway lights, runway centerline lights, runway centerline markings, 혹은 그 외 runway lighting and markings가 포함된다. commercial operators는 적절한 시각 참조물과 적절한 운영기준을 통해 1600 RVR이나 1/4 SM의 시정에서 이륙할 수 있다.
Ceilings
ceiling은 broken, overcast, 혹은 obscuration으로 보고되었으며 thin이나 partial로 분류되지 않는 가장 낮은 구름 층이나 시정 장애 현상(AGL)을 의미한다.
automated weather system은 공항 기상 정보를 수집하는, 그리고 무선 및/혹은 유선으로 기상 정보를 전파하는 automated weather sensor platforms로 구성된다. 이러한 시스템은 ASOS/AWSS(Automated Weather Sensor System), 그리고 AWOS로 구성된다. 해당 시스템들은 관제탑이 없는 공항에 매우 귀중한 기상 정보를 제공한다. [그림 1-11]
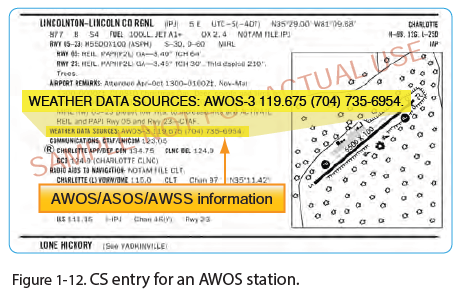
AWOS와 ASOS/AWSS는 다양한 기능을, 그리고 광범위한 기상 보고를 제공한다. automated systems는 보통 1 ~ 2분마다 업데이트 되므로 최신 기상 정보가 지속적으로 방송된다. 기본적인 AWOS는 고도계 설정, 풍속 및 풍향, 온도, 그리고 이슬점 정보만을 제공한다. 더욱 발전된 시스템(예를 들어 ASOS/AWSS와 AWOS-3)은 추가 정보(예를 들어 돌풍, 가변풍, 그리고 밀도 고도)를 제공할 수 있다. ASOS/AWSS stations는 service level A나 B를 제공하며 RVR을 보고한다. 특정 시설의 특정 장비는 Chart Supplement에 나열되어 있다. [그림 1-12]
Part 91 operators의 경우 앞서 언급한 시정 보고와 기상 서비스를 사용하지 않아도 된다. Part 121/135 operators는 각각의 운영기준을 따라야 하며 NWS(혹은 그 외 승인된 출처)가 제공하는 기상 보고를 사용해야 한다. 대부분의 운영자들은 ATIS 정보, RVR(runway visual range) reports, 그리고 automated weather stations의 특정 보고를 사용해야 한다. Part 121/135 operators는 AWOS-3 station이 제공하는 모든 보고들을 사용할 수 있다. 각 유형의 automated station은 각각의 운영기준에서 명시된 대로 서로 다른 승인 수준을 가지고 있다. 출항 정보와 함께 타워가 제공하는 ceiling/visibility reports는 공식 기상으로 간주되며 RVR reports는 보통 controlling visibility 기준이 된다.
Automatic Terminal Information Service(ATIS)
ATIS는 기상 정보를 얻기 위한 또 하나의 수단이다. 관제탑이 운영 중인 대부분의 공항에서 ATIS를 이용할 수 있다. 즉, ATIS 주파수를 통한 기상 정보는 관제탑 운영 시간 도중에만 이용 가능하다. 일부 공항의 경우 관제탑이 닫았을 때 ASOS/AWSS 정보가 ATIS 주파수를 통해 방송된다. 해당 서비스는 ASOS/AWSS가 배치된, 그리고 관제탑에 ATIS-ASOS/AWSS interface switch가 설치된 공항에서만 이용 가능하다.
ATIS 보고에는 사용 중인 활주로 및 계기 접근, 특정 시설의 중단, 그리고 현재 기상 조건이 포함되어 있다. 시정은 SM 단위로 보고된다. 시정이 5SM 이상일 경우 이는 생략될 수 있다. ATIS 기상 정보는 특정 공항 및 장비에 따라 다양한 출처로부터 제공된다. 해당 정보는 기상 관측자로부터, 관제탑에 위치한 기상 기계로부터, 혹은 automated weather stations로부터 제공될 수 있다. 이러한 정보들은 NWS가 승인하는 기상 출처로부터 제공되어야만 ATIS 보고에 사용될 수 있다.
Digital Automatic Terminal Information Service(D-ATIS)
D-ATIS는 ATIS 보고를 수신하는 대체 수단이다. 이러한 서비스는 유선 및 데이터 링크 교신을 통해 ATIS 수신 범위를 벗어난 항공기, 항공사, 그리고 기타 사용자에게 문자 메시지를 제공한다. 데이터 링크 서비스를 갖춘 항공기는 본인의 ACARS(Aircraft Communications Addressing and Reporting System)를 통해 ATIS 정보를 수신할 수 있다. 덕분에 조종사는 항공기 내에서 ATIS 보고를 읽거나 인쇄할 수 있다. 이는 보고의 정확도를 높이며 조종사 업무량을 감소시킨다.
또한 이 서비스는 송신기 범위 내의 모든 항공기에게 전송될 수 있는 컴퓨터 음성 메시지를 제공한다. TDLS(Terminal Data Link System) D-ATIS application은 사용자에게 정보를 제공하기 위하여 local automated weather sources에서 입력된, 혹은 직접 입력된 기상 정보를 사용한다. D-ATIS 기능을 갖춘 공항은 Chart Supplement에 나열되어 있다.
ATIS 정보는 매 시간마다, 그리고 중대한 기상 변화가 발생할 때마다 업데이트 된다. 따라서 해당 정보는 가장 최신의 보고가 아니다. 공항으로부터 출항하기 전에 조종사는 관제탑으로부터 최신 기상 정보를 얻어야 한다. ASOS/AWSS와 AWOS도 최신 기상 정보를 제공하긴 하지만 해당 정보가 관제탑 기상 정보를 대신해서는 안 된다.
IFR Alternate Requirements
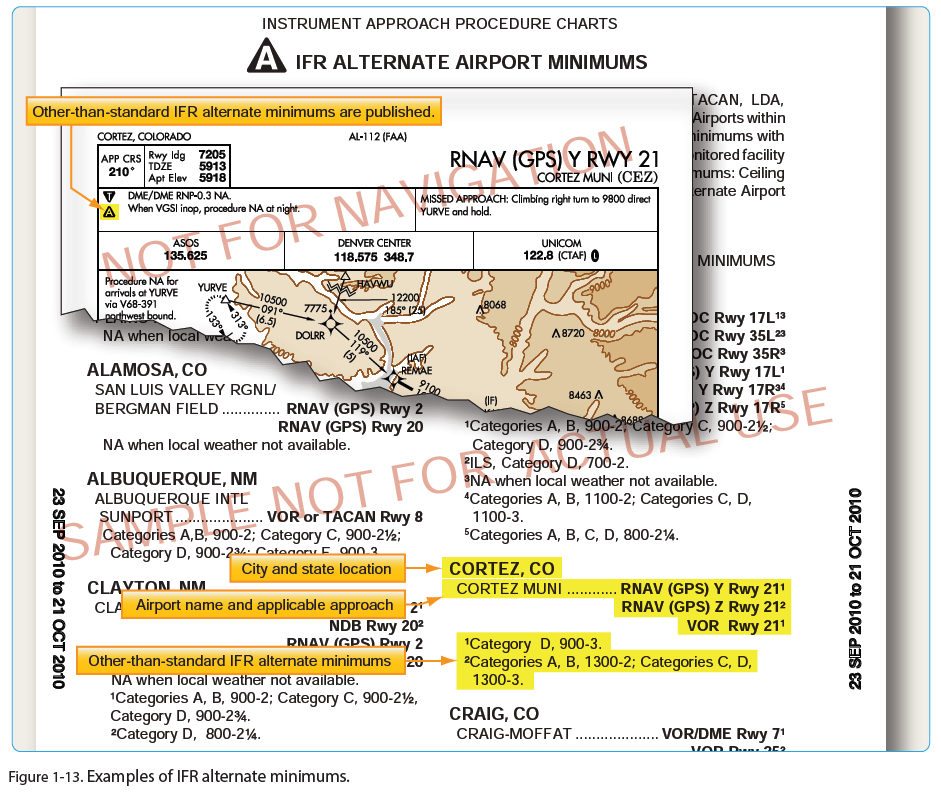
Aeronautical Information Services charts에는 standard alternate minimums가 게재되지 않는다. 만약 공항에 standard alternate minimums 이외의 minimums가 있다면 해당 정보가 approach chart booklet의 앞에 나열된다. 만약 접근 차트에 다음 기호가 있다면 alternate minimums 목록을 참조해야 한다. [그림 1-13]
교체비행장으로 사용될 수 없는 공항에는 다음 기호가 지정된다.
교체비행장에 대한 조건은 항공기 종류, 항공기 장비, 접근에 사용되는 NAVAID, 그리고 기상 예보에 따라 다르다. 예를 들어 TSO-C129/TSO-C196 사용자는 GPS approach procedure만을 갖춘 공항을 교체비행장으로 사용할 수 없다(단, 접근 차트에서 “N/A”가 제거되었으며 특정 조건을 만족하는 경우 제외 – AIM 참조). 일부 RNAV GPS approach procedure와 GPS approach procedure의 경우 “N/A”가 제거되고 있다. 따라서 TSO-C145/TSO-C146을 준수하는 approach-approved WAAS(Wide Area Augmentation System)를 갖춘 경우, 혹은 특정 조건을 만족하는 TSO-C129/TSO-C196을 갖춘 경우 해당 접근을 교체비행장으로 사용할 수 있다. 교체비행장에서 conventional approach를 수행하는 경우 대체 항법 수단으로 GPS가 승인되지 않는다. 따라서 접근 절차가 DME나 ADF를 필요로 한다면 항공기가 적절한 항전 장치를 갖추어야 한다.
14 CFR Part 91 조건에 따라 목적지 공항의 기상 예보가 ETA ±1시간 동안 ceiling 2,000ft 미만 및/혹은 visibility 3SM 미만이라면 IFR 비행 계획서에 교체비행장을 제출해야 한다. 해당 규칙을 기억하는 한 가지 방법은 “1, 2, 3 Rule.”이다.
모든 공항이 교체비행장으로 사용될 수 있지는 않다. 공항 NAVAID가 모니터링 되지 않는 경우, 혹은 공항이 기상 보고 기능을 갖추지 않은 경우에는 교체비행장의 자격이 부여되지 않을 수 있다. 공항이 교체비행장으로 사용되기 위해선 ETA에서의 기상 예보가 특정 조건을 충족해야 한다. 정밀 접근을 위한 standard alternate minimums는 ceiling 600ft 및 visibility 2SM이다. 비정밀 접근을 위한 minimums는 ceiling 800ft 및 visibility 2SM이다. 공항에 대해 더 높은 alternate minimums가 게재되지 않는 한 standard alternate minimums가 적용된다.
Alternate Minimums for Commercial Operators
Part 121/135 operators에 대한 IFR alternate minimums는 매우 구체적이며 Part 91 operators보다 더 엄격한 조건을 가지고 있다.
출항 공항의 기상이 해당 공항에 대한 자격 소지자의 운영기준(OpSpecs)상 landing minimums 미만인 경우 Part 121 operators는 운영기준, 그리고 14 CFR Part 121.617/625에 따라 출항 공항에 대한 이륙 교체비행장을 갖추어야 한다. 세 개 이상의 엔진을 갖춘 항공기의 경우 한 쪽 엔진이 작동하지 않는 상태에서 정상 순항 속도로 비행할 때 출항 공항으로부터 2시간 이내인 교체비행장을 선택해야 한다. 두 개의 엔진은 갖춘 항공기의 경우 한 쪽 엔진이 작동하지 않는 상태에서 정상 순항 속도로 비행할 때 출항 공항으로부터 1시간 이내인 교체비행장을 선택해야 한다. 모든 조건들이 충족된다면 착륙 예정 공항을 교체비행장으로 사용할 수 있다. 또한 Domestic Part 121 operators는 목적지 공항의 기상 예보가 ETA ±1시간 동안 ceiling 2,000ft 미만 및/혹은 visibility 3SM 미만이라면 교체비행장을 제출해야 한다.
straight-in non-precision approach, straight-in precision approach, 혹은 circling approach를 제공하는 항법 시설이 하나 이상 존재하는 교체비행장의 경우 다음을 통해 ceiling/visibility를 결정한다:
∙ceiling의 경우 CAT I HAA(height above airport)/HAT(height above touchdown)에 400ft를 더한다.
∙visibility의 경우 CAT I visibility에 1mile을 더한다.
이는 Part 121 operators가 minimums를 계산할 때 요구되는 기준의 한 예시이다. Part 135 operators 또한 본인의 운영기준, 그리고 14 CFR Part 135.219 ~ 225에 따라 alternate minimums에 관하여 특정 규칙을 적용받는다. 이는 Part 121 operators가 사용하는 것과 유사하지만 추가적인 고려 사항이 존재한다.
alternate minimum 기준은 조종사로 하여금 비행의 접근 구간을 고려하도록 보장하기 위한 수단으로 사용된다. 실제로 교체비행장으로 회항해야 한다면 운영기준에서 명시하는 대로 published approach minimums를, 혹은 lower-than-standard minimums를 사용해야 한다.
다음은 항공안전법 시행규칙 제186조(교체비행장 등)를 발췌한 내용이다(시행 2024.3.13).
① 항공운송사업에 사용되거나 항공운송사업을 제외한 국외비행에 사용되는 비행기를 운항하려는 경우에는 다음 각 호의 구분에 따라 제183조제8호에 따른 교체비행장을 지정하여야 한다.
1. 출발비행장의 기상상태가 비행장 착륙 최저치(aerodrome landing minima) 이하이거나 그 밖의 다른 이유로 출발비행장으로 되돌아올 수 없는 경우: 이륙교체비행장(take-off alternate aerodrome)
2. 제215조제1항에 따른 비행기로서 제215조제2항에 따른 시간을 초과하는 지점이 있는 노선을 운항하려는 경우: 항공로 교체비행장(en-route alternate aerodrome). 이 경우 항공로 교체비행장은 제215조제3항에 따른 승인을 받은 최대회항시간 이내에 도착 가능한 지역에 있어야 한다.
3. 계기비행방식에 따라 비행하려는 경우: 1개 이상의 목적지 교체비행장(destination alternate aerodrome). 다만, 다음 각 목의 어느 하나에 해당하는 경우에는 그러하지 아니하다.
가. 최초 착륙예정 비행장(aerodrome of intended landing)의 기상상태가 비행하는 동안 또는 도착 예정시간에 양호해질 것이 확실시 되고, 도착 예정시간 전ㆍ후의 일정 시간 동안 시계비행 기상상태에서 접근하여 착륙할 것이 확실히 예상되는 경우
나. 최초 착륙예정 비행장이 외딴 지역에 위치하고 적합한 목적지 교체비행장이 없는 경우
② 제1항제1호에 따른 이륙교체비행장은 다음 각 호의 요건을 갖추어야 한다.
1. 2개의 발동기를 가진 비행기의 경우에는 1개의 발동기가 작동하지 아니할 때의 순항속도로 출발비행장으로부터 1시간의 비행거리 이내인 지역에 있을 것
2. 3개 이상의 발동기를 가진 비행기의 경우에는 모든 발동기가 작동할 때의 순항속도로 출발비행장으로부터 2시간의 비행거리 이내인 지역에 있을 것
3. 예상되는 이용시간 동안의 기상조건이 해당 운항에 대한 비행장 운영 최저치(aerodrome operating minima) 이상일 것
③ 항공운송사업에 사용되는 비행기 외의 비행기를 계기비행방식에 따라 비행하려면 1개 이상의 목적지 교체비행장을 지정하여야 한다. 다만, 다음 각 호의 어느 하나에 해당하는 경우에는 그러하지 아니하다.
1. 최초 착륙예정 비행장의 기상상태가 비행하는 동안 또는 도착 예정시간에 양호해질 것이 확실시되고, 도착 예정시간 전ㆍ후의 일정 시간 동안 시계비행 기상상태에서 접근하여 착륙할 것이 확실히 예상되는 경우
2. 최초 착륙예정 비행장이 외딴 지역에 위치하고 적합한 목적지 교체비행장이 없는 경우
④ 제3항 각 호 외의 부분 단서 및 각 호에 따라 목적지 교체비행장의 지정이 요구되지 않는 경우로서 다음 각 호의 기준에 적합하지 않은 경우에는 비행을 시작해서는 안 된다.
1. 최초 착륙예정 비행장에 표준계기접근절차가 수립되어 있을 것
2. 도착 예정시간 2시간 전부터 2시간 후까지의 기상상태가 다음 각 목과 같이 예보되어 있을 것
instrument departure procedures는 terminal area에서 적절한 en route structure까지 장애물 회피를 제공하는 IFR 절차이다. 이러한 절차들은 주로 출항 항공기에게 장애물 회피를 제공하도록 설계되었다. DPs(Departure Procedures)에는 두 가지 유형이 있다:
∙Obstacle Departure Procedures (ODPs)
∙Standard Instrument Departures (SIDs)
공항에 대한 계기 접근이 처음 개발될 때 ODP의 필요성이 평가된다. 항공기가 assessment area의 한계 내에서 활주로로부터 어느 방향으로든 선회할 수 있으며 장애물로부터 개방된 경우 해당 활주로가 diverse departure assessment를 통과하며 ODP가 게재되지 않는다. diverse departure assessment는 항공기가 최소 1,000ft의 ROC를(산악 지형의 경우에는 최소 2,000ft의 ROC를) 확보할 수 있을 때까지 상승하는 동안 규정된 ROC(required obstacle clearance)가 확보되도록 보장한다. 모든 departures(diverse 포함)에 필요한 ROC는 조종사가 DER(departure end of the runway)을 최소 35ft로 통과하고, 최초 선회를 수행하기 전에 400ft까지 상승하며, minimum IFR altitude에 도달하기 전까지 최소 200ft/NM의 climb gradient를 유지함을 기준으로 한다(단, 달리 명시된 경우 제외). ODP assessment 이후 ATC flow management, 시스템 개선, 혹은 소음 감소를 위해 SID를 설정할 수 있다.
Design Criteria
departure 설계 기준은 DER을 최소 35ft로 통과한 후 200ft/NM으로 상승하는 것으로 시작된다. [그림 1-14] 항공기 상승 경로는 ROC(required obstacle clearance)로부터 최소 35ft의 추가 장애물 간격을 제공한다. ROC는 OCS(obstacle clearance surface)와 required climb gradient(200ft/NM) 사이의 간격이다. ROC는 DER에서 0이다. 그리고 출항 경로를 따라 en route operations를 위한 적절한 ROC에 도달하기 전까지 증가한다. en route operations를 위한 적절한 ROC는 대략 25NM에서 1,000ft로 달성된다(산악 지역의 경우에는 대략 46NM에서 2,000ft로 달성됨).
diverse departure를 사용하는 활주로(ODP가 게재되지 않은 활주로)에서 이륙하였으며 published route를 운항하지 않는 경우, 그리고 published route의 MEA나 MOCA 미만을 운항하는 경우 25/46NM 너머에서 장애물을 회피하는 것은 조종사의 책임이다. [그림 1-15]
최근 TERPS 기준의 변화로 인하여 OCS가 더 낮아졌다. [그림 1-16] 허나 이전 기준에 따라 평가된 departures가 아직 많이 존재한다. [그림 1-14] departure가 이전의 기준에 따라 평가되었는지, 혹은 현재의 기준에 따라 평가되었는지를 조종사가 확인할 방법이 없으므로 모든 departures가 현재의 기준에 따라 평가되기 전까지는 departure environment를, 그리고 이와 연관된 장애물들을 숙지해야 한다(특히 DER을 35ft 미만으로 통과하는 경우).
모든 departure procedures는 처음에 40:1 OCS(Obstacle Clearance Surface)를 기준으로 장애물을 평가한다. 만약 40:1 OCS를 관통하는 장애물이 없다면 standard(200ft/NM) climb gradient는 장애물로부터 최소 48ft/NM의 안전거리를 제공한다. 또한 departure design에는 PCG(positive course guidance)가 포함되어야 한다(일반적으로 straight departures의 경우 DER로부터 5 ~ 10NM 이내). 설령 항공기의 성능이 minimum climb gradient를 크게 초과하여도 항상 차트에 게재된 departure routing을 비행해야 한다.
공항은 Chart Supplements의 A/FD section에 declared distances를 게재한다. 여기에는 takeoff runway available (TORA), takeoff distance available (TODA), accelerate-stop distance available (ASDA), 그리고 landing distance available (LDA)이 포함된다. [그림 2-16]
모든 departure design에 40:1 OCS를 적용하는 것이 가장 이상적이다. 허나 지형과 인공 장애물로 인해 대체 조건을 사용해야 하는 경우가 종종 존재한다. 이 경우 200ft/NM을 초과하는 climb gradient, standard takeoff minimums의 증가(장애물을 “see and avoid” 하기 위하여), 특정 reduced takeoff length에서의 200ft/NM 상승, 혹은 이러한 선택지들과 특정 departure route의 조합이 departure design에 포함될 수 있다.
장애물로 인하여 200ft/NM보다 높은 climb gradient가 필요할 수 있다. 이 경우 장애물 상공에서 제공되는 ROC는 게재된 climb gradient의 24%에 해당한다. ODP와 SID에서 장애물 회피를 위한 required climb gradient는 다음 공식을 통해 구할 수 있다:
다음 공식은 장애물 이외의 목적(예를 들어 ATC requirements)을 위한 SID climb gradients를 계산하는데 사용된다:
Note: 이 climb gradient는 장애물을 위한 climb gradient 이상이어야 한다.
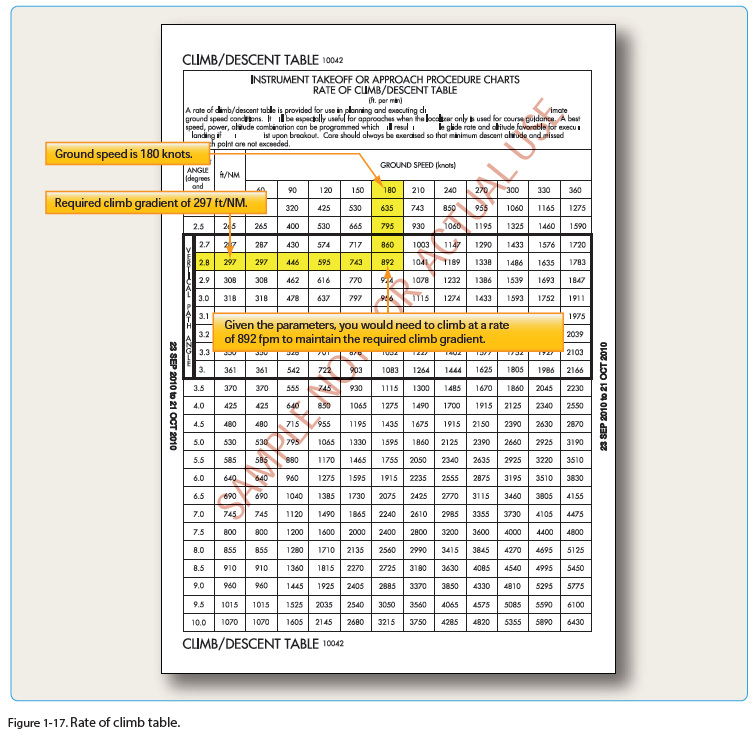
특정 고도에 도달하기 전까지, 혹은 en route environment(예를 들어 MEA, MOCA)에 도달하기 전까지는 차트에 게재된 climb gradient 이상을 유지해야 한다. climb gradients를 포함하는 departure design은 항공기의 성능을 고려하지 않는다. TERPS 기준은 항공기가 모든 엔진 및 시스템이 완전히 작동하는 상태로 운항된다 가정한다. 이륙 후 발생할 수 있는 엔진 고장, EOPs(engine out procedures), 혹은 기타 비상 상황을 대비하기 위한 비상 절차를 개발하는 것은 operator의 책임이다. 특정 climb gradient가 필요한 경우 조종사는 항공기의 성능을 완전히 이해한 후 해당 상승 조건을 준수할 수 있는지 판단해야 한다. standard climb(200ft/NM)은 대부분의 항공기에서 문제가 되지 않는다. 장애물로 인하여 climb gradient가 증가된 경우에는 항공기의 성능을 계산하는 것이 중요하다(특히 더운 날 높은 고도의 공항에서 이륙할 때). 계산을 돕기 위하여 모든 TPP 책자의 앞부분에는 특정 climb gradients 및 groundspeeds와 관련된 상승률 표가 포함되어 있다. [그림 1-17]
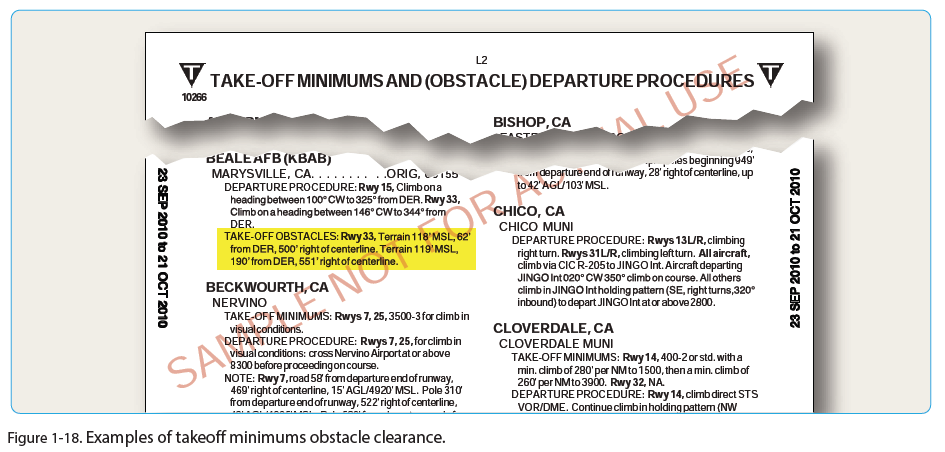
Low, Close-In Obstacles
DER로부터 1NM 이내에 위치한, 그리고 40:1 OCS를 관통하는 장애물을 “low, close-in obstacles”라 부른다. 이러한 장애물들은 DER elevation으로부터 200ft 미만이고, 활주로로부터 1NM 이내에 위치하며, takeoff minimums의 증가를 필요로 하지 않는다. 이러한 장애물을 통과하기 위한 standard ROC는 매우 짧은 거리에서 200ft/NM을 초과하는 climb gradient를 필요로 한다(단, 항공기가 DER로부터 200ft에 도달하기 전까지). 과도한 climb gradient가 게재되는 것을 방지하기 위하여 TPP 책자의 Takeoff Minimums and (Obstacle) Departure Procedures section에 장애물 고도(AGL/MSL)와 위치가 명시되어 있다. 이러한 note는 조종사의 장애물 회피를 돕기 위함이다. 이는 다양한 방법을 통해 수행될 수 있다:
∙장애물을 육안으로 확인한 다음 장애물을 둘러 기동할 수 있다.
∙이른 이륙/상승 성능은 항공기가 장애물을 훨씬 넘어설 수 있도록 해준다.
∙만약 departure 도중 장애물이 육안으로 확인될 수 없다면 이륙 후 장애물을 회피하기 위해 필요한 선회나 기동을 비행 전 계획 시 고려해야 한다.
이러한 장애물들은 DER에 근접할 때까지 이륙하지 않는 항공기, 혹은 최소 상승률로 상승하는 항공기에게 특히나 중요하다. [그림 1-18]
Part 121이나 135에 따라 운영되는 Large and turbine-powered, multiengine transport/commuter category airplanes는 TERPS에서 다루는 IFR departure procedure 조건 말고도 추가적인 이륙 장애물 회피 조건을 갖추고 있다.
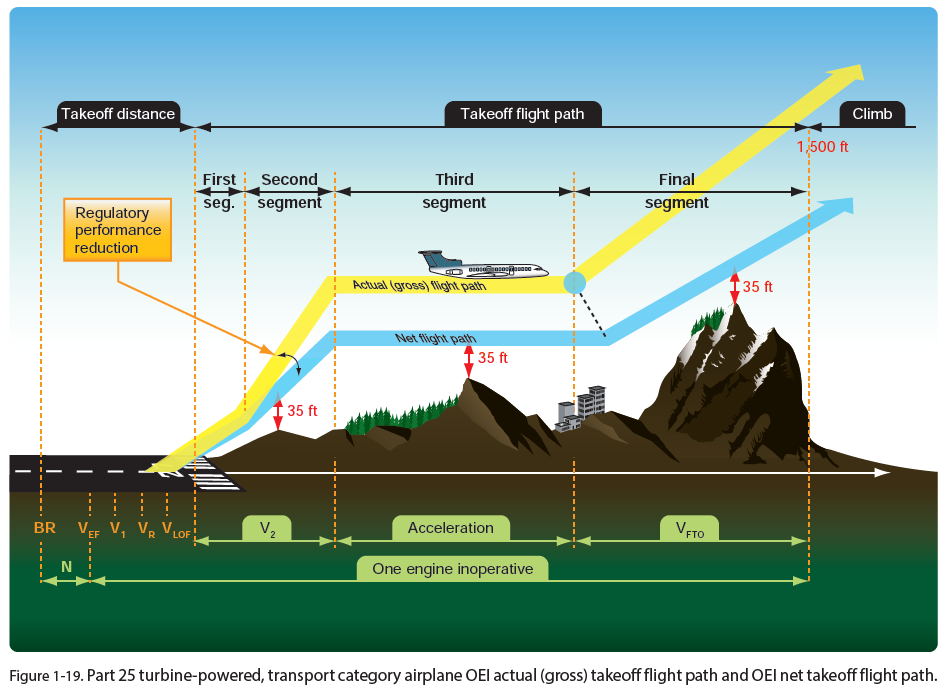
Part 25 transport category/Part 23 commuter category airplane certification rules는 OEI(one-engine-inoperative) takeoff flight path를 규정한다. OEI takeoff flight path는 OEI takeoff distance의 끝 지점 상공 35ft에서 시작되어 활주로 표고로부터 최소 1,500ft의 높이에서 종료되는 일련의 구간으로 구성된다. 허나 장애물 회피를 위해 필요한 경우에는 OEI net takeoff flight path assessment가 1,500ft 너머로 계속될 수 있다.
actual(혹은 gross) OEI flight path는 이륙 당시의 항공기 무게, 외장, 그리고 환경 요인을 기초로 이륙 절차를 사용하였을 때 달성될 수 있는 vertical OEI climb profile을 나타낸다. OEI net takeoff flight path는 운영 조건에서 예상되는 변화들에 대한 안전 여유를 제공하기 위하여 certification rules에서 명시하는 값만큼 성능이 저하된 actual OEI takeoff flight path이다. OEI net takeoff flight path는 비행경로의 중심선으로부터 특정 거리 이내에 위치한 장애물로부터 적어도 35ft 위에 위치해야 한다(Part 121 및 135의 Subpart I). 실제 장애물 회피 능력은 gross flight path와 net flight path의 차이에 35ft를 더한 값과 같다. [그림 1-19]
Advisory Circular (AC) 120-91, Airport Obstacle Analysis는 이러한 조건을 준수하기 위한 takeoff and initial climb out airport obstacle analyses와 engine out obstacle avoidance procedures를 개발할 때 장애물로부터의 안전한 간격을 결정하는데 사용할 수 있는 지침과 기준을 제공한다. Part 121이나 135에 따라 IFR로 출항하는 조종사는 해당 규정의 장애물 회피 조건(subpart I)을 준수할 수 있는 engine-inoperative takeoff obstacle clearance or avoidance procedure를 사용해야 한다(14 CFR 91.175(f)(4)). OEI takeoff obstacle clearance assessment는 IFR departure procedure 및 이와 관련된 all-engines-operating climb gradient requirements와 별개이다. large, commuter, 그리고 turbine-powered aircraft에 적용되는 Part 91 operating rules는 OEI takeoff obstacle clearance or avoidance procedure의 사용을 요구하지 않는다. 허나 이러한 항공기의 Part 91 operators가 해당 절차를 사용하도록 권장된다.
OEI net takeoff flight path obstacle assessment는 OEI takeoff distance의 끝 지점 상공 35ft에서 시작된다. 반면 TERPS의 경우 DER에서 obstacle assessment가 시작된다. 따라서 OEI net takeoff flight path assessment가 DER 이전에 시작될 수도 있다. 이는 OEI climb를 위해 활주로의 일부분을 사용할 수 있도록 허용한다. OEI net takeoff flight path obstacle clearance assessment는 low, close-in obstacles의 회피도 고려해야 한다. 해당 장애물은 IFR departure procedure에 명시되어 있긴 하지만 TERPS-based IFR climb gradient를 준수한다 하여 반드시 회피되지는 않는다.
OEI net takeoff flight path는 각 항공기 유형마다 다르다. 그리고 OEI net takeoff flight path는 OEI flight track 바로 아래에 위치한 장애물에 대한, 그리고 비행경로의 중심선으로부터 특정 거리 이내에 위치한 장애물에 대한 required obstacle clearance가 매 이륙마다 평가된다. 반면 TERPS는 all-engine-operating climb profile이 en route environment에 도달하기 전까지 최소로 유지되어야 하는 required climb gradient를 제공한다. Part 25 transport category/Part 23 commuter category aircraft’s OEI takeoff flight path는 특정 항공기 유형에 대해 운영자가 설정하며 이후 해당 비행경로 아래(혹은 비행경로의 중심선으로부터 특정 거리 이내)의 모든 장애물을 통과할 수 있는 제한 중량을 결정한다.
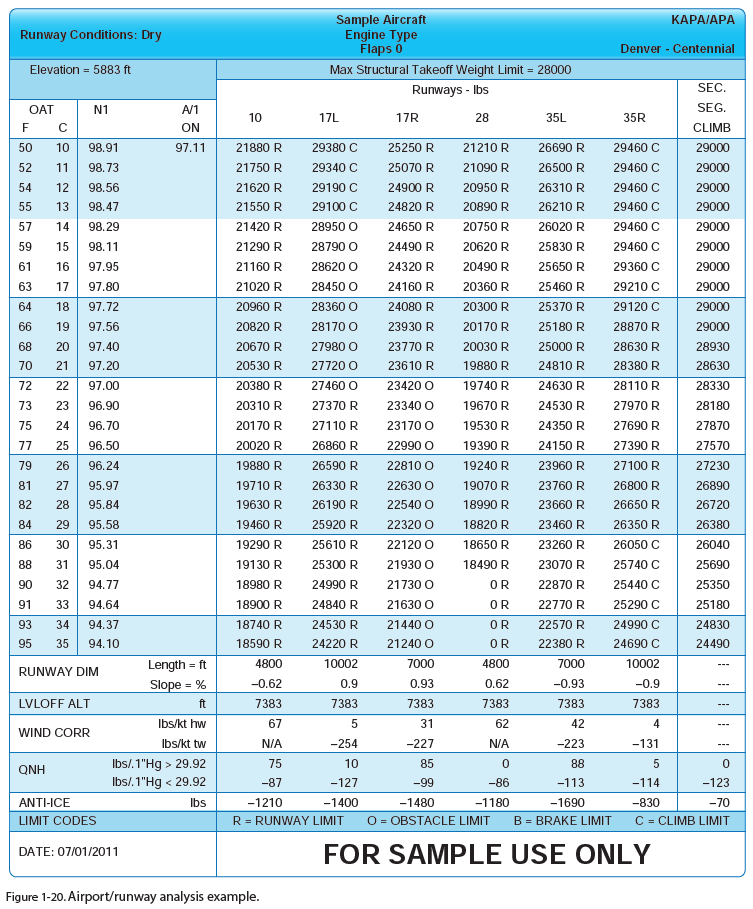
이러한 항공기의 조종사와 운영자는 OEI net takeoff flight obstacle clearance and takeoff field length requirements에 관한 Part 121 subpart I나 Part 135 subpart I의 조건을 준수하기 위하여 airport/runway analysis 서비스 제공업체의 서비스를 이용해야할 수 있다. [그림 1-20] airport/runway analysis는 광범위한 공항/장애물 데이터베이스 및 지형 정보를 통해 항공기 성능을 계산하는 작업을 포함한다. 이를 통해 특정 공항, 활주로, 그리고 온도 범위에 대한 특정 항공기/엔진 구성에서의 maximum allowable takeoff and landing weights가 산출된다. 이러한 계산에는 flaps settings, 항공기 특성, 활주로 상태, 장애물 회피, 그리고 기상 조건도 고려된다. 또한 AFM에서 제공하는 OEI 상승 성능과 비행경로 데이터를 통해, 혹은 제조업체가 제공하는 항공 전자 성능 프로그램을 통해 자체분석을 수행하려는 운영자를 위하여 장애물 정보가 이러한 서비스 제공업체에 제공된다.
airport/runway analysis는 이륙 도중 엔진 고장이 발생한 후 straight-out departure를 수행한다는 가정을 기반으로 한다. 허나 straight-out departure가 실용적이지 않은 경우에는 각 활주로에 대한 special OEI turn procedure를 개발할 수 있다. OEI turn procedure는 차트에 게재된 IFR departure procedure를 따르거나, 혹은 allowable takeoff weight/payload를 증가시키기 위해 이 외의 방법으로 장애물을 피하도록 설계된 경로를 따를 수도 있다. special OEI procedure를 생생하게 나타내기 위하여 해당 절차를 그림으로 표현할 수 있다. 이륙 도중 엔진 고장이 발생한 경우 이는 비정상 상황이다. 따라서 소음 감소, 항공 교통, SIDs, DPs, 그리고 정상 운영 고려 사항들보다 조종사가 취하는 조치(OEI turn procedure 포함)가 우선된다.
airport/runway analysis는 AFM에서 제공하는 OEI net takeoff flight path data와 특정 lateral obstacle assessment area를 통해 장애물 회피를 평가한다는 것을 알아야 한다. 설령 OEI special procedure와 IFR departure procedure의 경로가 동일하다 하더라도 analysis에서 제공하는 takeoff weight limit가 반드시 IFR departure procedure에 게재된 all-engines-operating climb gradient를 준수해야 하지는 않는다.
DP에는 두 가지 유형이 있다: ODPs, 그리고 SIDs. ODPs는 장애물 회피를 돕기 위해 개발된 것으로 텍스트 형식이나 그래픽 형식으로 인쇄된다. SIDs는 ATC clearances를 전달하기 위해 개발되었으며 항상 그래픽 형식으로 인쇄된다.
Obstacle Departure Procedures(ODPs)
ODP라는 용어는 단순히 장애물 회피를 제공하는 절차를 규정하기 위해 사용된다. ODPs는 장애물 회피만을 제공하며 ATC-related climb requirements를 포함하지 않는다. 사실 ODP의 주안점은 전형적인 departure routes를 수용함과 동시에 en route structure까지 가장 덜 제한적인 경로를 사용할 수 있도록, 혹은 random(diverse) IFR flight을 허용하는 고도까지 상승할 수 있도록 하는 것이다.
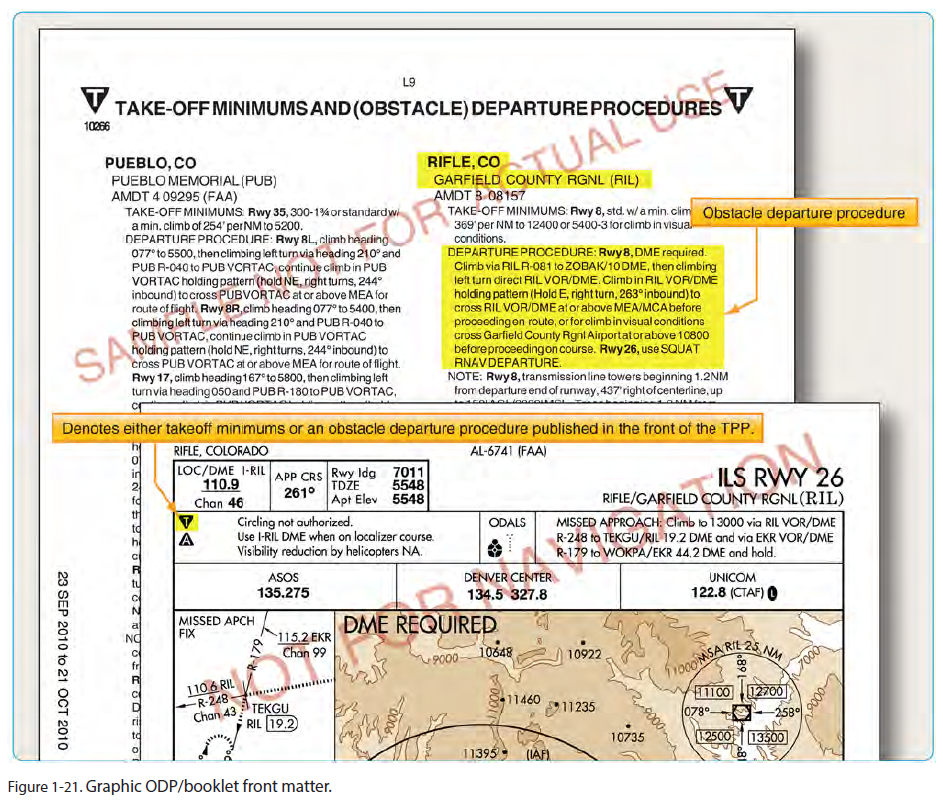
장애물이 40:1 departure OCS를 통과하면 ODP가 개발되어야 한다. 특정 활주로에 대해 오직 하나의 ODP만 설정된다. 이는 특정 활주로에 대한 기본적인 IFR departure procedure로 간주된다. ODP는 ATC radar vectors나 SID가 없을 때 사용된다. SID나alternate maneuver(ATC가 할당한)를 사용할 수 있는 선택지가 텍스트로 게재되지는 않는다(예를 들어 “Climb heading 330 to 1200 before turning or use Manchester Departure”, 혹은 “Turn right, climb direct ABC VOR or as assigned by ATC.”). ODP는 기본적으로 텍스트 형식이다. 허나 명확한 설명 및 이해를 위하여 시각적 표시가 필요할 수도 있다. ODP가 그래픽 형식인 경우 차트의 제목에 (Obstacle)이라는 단어가 포함된다. 또한 새로이 개발되는 모든 RNAV ODPs는 그래픽 형식으로 발행된다. [그림 1-21]
ODP Flight Planning Considerations
항공기 분리를 위해 꼭 필요한 경우가 아니라면 ATC는 ODP를 할당하지 않는다. 해당 공항에 ODP가 존재하는지를 확인하는 것은 조종사의 책임이다. Part 91 pilot이 ODP, SID, 혹은 radar vectors가 포함된 clearance를 받지 못하였으나 해당 공항에 ODP가 존재한다면 ODP를 준수하는 것은 조종사의 선택이다. graphic ODP의 제목에 포함된 컴퓨터 코드를 통해 ODP를 비행계획서에 제출할 수도 있다. 한 가지 방법으로 조종사는 비행계획서의 remarks section에 “will depart (airport) (runway) via textual ODP”라 입력할 수 있다. 이는 관제사로 하여금 조종사의 의도를 명확히 알려주며 조종사/관제사 사이의 오해를 방지하는데 도움을 준다. clearance에 ODP가 포함되지 않았으나 ODP를 사용하기로 결정한 경우 조종사는 이를 ATC에 알려야 한다. 그래야 ATC가 적절한 항적 분리를 보장할 수 있다.
비행계획 도중 조종사는 출항 공항에 ODP가 존재하는지를 확인해야 한다. ODP는 IAPs(instrument approach procedures)가 갖춰진 공항에서만 설정될 수 있다는 점을 기억하라. ODP는 비행계획의 초기 구간에 큰 영향을 미칠 수 있다. 조종사는 정상 상승률보다 높은 상승률로 출항해야 하거나, 혹은 의도하는 방향의 반대쪽으로 출항해야 할 수도 있다. 어떠한 경우이든 비행계획과 초기 비행 방향이 변경되어야 한다. 기상 예보, 출항 활주로, 그리고 ODP를 통해 비행경로, 상승 성능, 그리고 연료 소모를 적절히 계획하여 departure procedures를 보완한다.
또한 Takeoff Minimums and (Obstacle) Departure Procedures section에 close-in obstacles가 표시되어 있다면 조종사가 이러한 장애물을 피하기 위한 조치를 취해야 할 수도 있다. inoperative engine으로 인한 상승 성능 저하, 혹은 이륙에 사용되는 활주로 길이가 고려되어야 한다. 짧은 이륙 거리를 필요로 하는 항공기가 긴 활주로를 이륙하는 경우에는 문제가 없을 수 있다. 허나 이륙 시 활주로의 대부분을 사용하는 항공기가 200ft/NM로 상승하는 경우에는 standard ROC에 미치지 못할 수도 있다.
고려해야 할 또 다른 요소는 이륙 도중 엔진 고장이 발생할 가능성이다. 비행 전 계획 도중 항공기 성능 차트를 사용하여 항공기가 특정 상승 성능을 유지할 수 있는지 확인한다. high performance aircraft의 경우 엔진 고장이 발생하여도 특정 climb gradients를 유지하는데 문제가 없을 수 있다. 허나 성능이 제한된 항공기의 경우 고도 상승은커녕 고도 유지도 불가능할 수 있다. 예상되는 항공기 성능을 기초로 비상조치 계획을 수립한다. 여기에는 비상 체크리스트, 그리고 안전을 보장하기 위해 취해야 할 조치가 포함된다.
Standard Instrument Departures(SIDs)
SID는 ATC가 요청하여 개발된 departure route로 보통 바쁜 공항에서 사용된다. 이는 공역 수용력을 증가시키기 위하여, 최소한의 교신으로 교통 흐름을 효과적으로 제어하기 위하여, 그리고 noise abatement procedures를 통해 환경적 영향을 줄이기 위하여 설계되었다.
SID 경로 설정 시 장애물 보호가 항상 고려된다. 허나 SID의 주요 목적은 ATC/조종사 업무량을 줄임과 동시에 en route structure로의 원활한 전환을 제공하는 것이다. SID를 비행하기 위해선 반드시 ATC clearance를 받아야 한다. 또한 SID는 무선 혼잡을 줄이고, 효율적인 공역 사용을 허용하며, departure clearances를 간소화함으로써 공역 사용자들에게 추가적인 이점을 제공한다. 이러한 이점들을 통해 효과적인 공항 운영이 이루어지며 그 결과 NAS의 수용력이 증가된다.
SID를 수행할 수 없는 경우, SID 차트를 소지하지 않는 경우, 혹은 SID를 사용하지 않으려는 경우에는 비행계획서의 remarks에 “NO SIDs”를 기재한다. 이렇게 하면 ATC는 SID를 포함하는 clearance를 발부할 수 없다. 대신 ATC는 최대한 비행계획서에 제출된 route로, 혹은 PDR(Preferential Departure Route)로 항공기를 승인할 것이다. SID를 사용하면 clearance를 전달하는 시간이 단축되고, departure가 간소화되고, 원하는 위치에서 IFR structure로 쉽게 진입할 수 있으며, 업무량이 줄어든다.
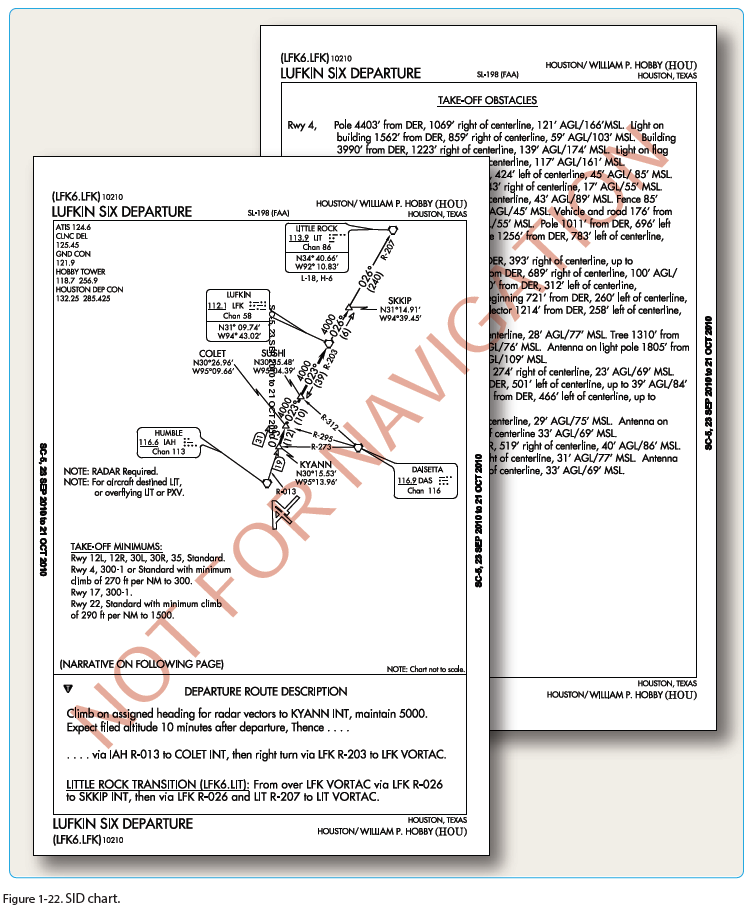
SID는 항상 그래픽 형식으로 인쇄된다. SID는 그림의 크기, 그리고 departure description에 필요한 공간에 따라 1 페이지이거나 2 페이지일 수 있다. 각 차트는 departure route, navigational fixes, transition routes, 그리고 required altitudes를 표시한다. departure description은 각 활주로에 대한 특정 절차를 간략하게 설명한다. [그림 1-22]
Transition Routes
transition routes를 통해 조종사는 basic SID의 끝부분에서 en route structure의 한 지점으로 전환할 수 있다. 보통 transition routes는 basic SID의 끝부분에서 다양한 방향으로 뻗어 있다. 이를 통해 조종사는 의도하는 출항 방향으로 향하는 transition route를 선택할 수 있다. transition route는 course, minimum altitude, 그리고 fix들 사이의 거리를 포함한다. 특정 transition route에 대한 SID를 제출하는 경우에는 비행계획서에 transition을 포함해야 한다. ATC가 transition routes를 지정하는 경우도 있다. 어떠한 경우이든 조종사는 departure와 transition에 대한 ATC clearance를 받아야 한다. ATCclearance에는 departure와 transition의 명칭이 모두 포함된다(예를 들어 Joe Pool Nine Departure, College Station Transition). [그림 1-23]
SID는 최소한의 무선 교신과 함께 자체 항법을 수행할 수 있도록 설계되었다. 이러한 유형의 절차는 보통 initial departure instructions와 하나 이상의 transition routes를 포함한다. 절차 진입을 돕기 위하여 SID의 초기 구간이 radar vectors를 필요로 할 수도 있다. [그림 1-24]
radar SID의 경우 ATC는 보통 해당 차트의 특정 route나 fix까지 radar vectors를 제공해야 한다. radar SIDs는 독자적인 pilot navigation을 수반하지 않으므로 departure routes나 transition routes를 포함하지 않는다. 이 절차는 보통 initial departure instructions를 명시하며 여기에는 initial heading/altitude가 포함된다 . vectors를 제공하기 위해선 항공기와의 radar contact가 반드시 이루어져야 한다. ATC는 조종사가 radar vectors를 즉시 준수하리라 예상하므로 해당 요청을 이행할 수 없다면 이를 알려야 한다. 또한 ATC instructions로 인하여 안전에 위협이 된다면(장애물이나 항적으로 인해) 이를 즉시 ATC에 알려야 한다.
이러한 유형의 절차는 종종 nonstandard lost communication procedures를 포함하므로 해당 절차를 사용하기 전에 차트를 검토하는 것이 좋다. ATC로부터 vector를 받는 도중 교신 두절이 발생하였다면 차트에 표시된 절차를 준수해야 한다(반드시 AIM에서 설명하는 절차를 따라야 하는 것은 아님). [그림 1-25]
SID Flight Planning Considerations
SID에 포함된 출항 경로를 고려한 다음 해당 절차를 사용할 수 있는지를 확인한다. 조종사는 본인의 비행계획서에 가장 적합한 SID를 선택할 수 있다. 비행 계획 도중 각 departure를 조사한 다음 어떤 절차로 출항해야 원하는 방향으로 이동할 수 있는지를 결정할 수 있다. 또한 특정 고도까지의 climb gradient가 상승 시간 및 연료 소모에 어떤 영향을 미치는지도 고려한다. 차트에 절차상 조건을 설명하는 notes가 나열되어 있으며 이는 필수 사항이다. [그림 1-26] notes는 다음을 포함할 수 있다:
∙항공기 장비 조건(DME, ADF, 등등.)
∙작동 중인 ATC 장비(radar)
∙minimum climb requirements
∙특정 항공기 유형에 대한 제한 사항(turbojet만 해당)
∙특정 목적지에 대한 제한
특정 활동을 알리기 위하여 절차에 주의 문구가 포함될 수도 있다. [그림 1-26] 특정 조건을 준수할 수 없다면 해당 절차를 비행계획서의 일부로 제출해서는 안 된다. 만약 ATC가 SID를 할당하였다면 all-engine-operating performance numbers를 다시 계산해야 할 수도 있다. 만약 SID의 climb gradient를 준수할 수 없다면 해당 SID에 대한 clearance를 수락해서는 안 된다.
altitude restrictions를 포함하는 SID clearance는 “climb via”로 발부될 수 있다. climb via는 해당 경로/절차의 lateral path, speed restrictions, 그리고 altitude restrictions를 준수해야 한다는 abbreviated clearance이다.
필요한 경우 ATC는 교통 관리나 편의를 위하여 SID나radar vectors를 할당할 수 있다. SID를 비행하기 위해선 clearance를 통해 승인을 받아야 한다. SID가 포함된 clearance를 수락하기 위해선 해당 차트를 소지하고 있어야 한다. ATC가 발부하는 SID를 수락하거나 거부하는 것은 조종사의 책임이다. 조종사는 다음을 기초로 clearance를 수락하거나 거부해야 한다:
∙절차에 필요한 성능을 준수하는 능력.
∙절차에 필요한 정확도를 항행하는 능력.
∙SID 차트 소지 여부.
∙SID에 대한 이해도.
SID나 radar vectors를 통해 출항이 승인되었다면 항적 분리에 대한 책임은 ATC에게 있다. SID는 장애물 회피를 고려하므로 차트에 표시된 대로 비행되어야 한다. 또한 visual conditions에서 출항하는 경우에는 항적 스캐닝을 계속 수행해야 한다. 만약 해당 clearance가 본인이나 타인의 안전을 위협할 수 있다면 이를 ATC에 알려야 한다. DP는 장비 조건에 따라 다음과 같이 분류된다:
∙Non-RNAV DP – 이는 conventional avionics를 갖춘 항공기를 위해 설계되었다. 이러한 DP는 추측 항법을 통해 설계될 수도 있다. conventional avionics sources(예를 들어 DME, VOR, 그리고 LOC)를 수신하는 일부 FMS의 경우 해당 시스템이 non-RNAV DP를 비행하도록 증명된다. conventional avionics sources의 입력들은 한 번에 하나씩, 혹은 조합되어서 navigation solution에 적용될 수 있다. 일부 FMS는 잘못된 항법 정보를 탐지 및 분리시키는 기능을 제공한다.
∙RNAV DP – 이는 RNAV avionics(예를 들어 GPS, VOR/DME, DME/DME)를 갖춘 항공기를 위해 설계되었다. RNAV DP는 automated vertical navigation을 필요로 하지 않는다. GPS를 필요로 하지 않는 모든 RNAV 절차들에는 “RADAR REQUIRED”라는 note가 표시되어야 한다. RNAV departures에 TSO-C129 GPS 장비를 사용하기 전에 해당 위치에 대한 RAIM(receiver autonomous integrity monitoring) availability를 확인해야 한다.
∙Radar DP – SID 설계를 위한 navigation guidance에 레이더가 사용될 수도 있다. ATC가 출항 항공기를 특정 ATS Route, NAVAID, 혹은 fix로 vector 해야 한다면 radar SIDs가 설계된다. fix는 ground-based NAVAID이거나, waypoint이거나, 혹은 하나 이상의 radio NAVAIDs를 기준으로 규정될 수 있다. 모든 fix가 waypoint는 아니다. 왜냐하면 fix가VOR이거나 VOR/DME일 수도 있기 때문이다. 허나 모든 waypoint는 fix이다. 또한 conventional SID나 RNAV SID에 진입하기 위하여 radar vectors가 사용될 수도 있다. radar vectors를 필요로 하는 SID에는 “RADAR REQUIRED”라는 note가 표시되어야 한다.
Area Navigation(RNAV) Departures
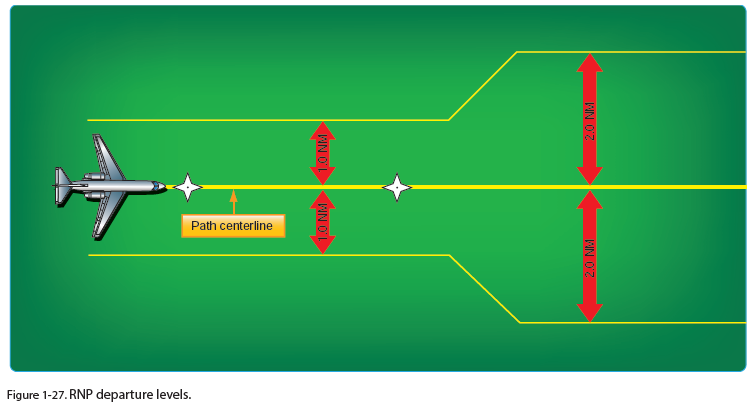
모든 RNAV SIDs와 graphic ODPs는 RNAV 1이다. 이러한 절차들은 보통 departure end runway 근처의 initial RNAV leg에서, 혹은 initial heading leg에서 시작된다. 또한 이러한 절차들은 AC 90-100, U.S. Terminal and En Route Area Navigation (RNAV) Operations에서 설명하는 기준을 충족하는 시스템 성능을 필요로 한다. RNAV departures는 절차 명칭에 포함된 RNAV라는 용어를 통해 식별될 수 있다. RNP(required navigation performance)의 관점에서 볼 때 RNAV departure routes는 아래에 나열된 1NM, 혹은 2NM의 performance standards로 설계된다. 즉, 조종사와 항공기 장비는 경로의 중심선으로부터 양쪽 1NM, 혹은 2NM 이내로 항공기를 유지할 수 있어야 한다. [그림 1-27]
∙RNAV 1 procedures는 항공기의 total system error가 총 비행시간의 95% 동안 ±1NM 이내로 유지되길 요구한다.
∙RNAV 2 procedures는 항공기의 total system error가 총 비행시간의 95% 동안 ±2NM 이내로 유지되길 요구한다.
RNP는 on-board monitoring and alerting을 갖춘 RNAV이다. 또한 RNP는 특정 공역을 운항하는데 필요한 항법 성능을 나타내는 표현이다. DP에 RF(radius to a fix) leg가 포함된 경우, 혹은 DME/DME/IRU를 사용할 때 surveillance(radar) monitoring이 필요하지 않은 경우에는 RNAV 1 대신 RNP 1이 사용된다. 이러한 절차에는 “RNP 1”이라는 note가 표시된다.
RNAV 절차나 RNP 절차의 조건을 준수할 수 없는 경우 조종사는 최대한 빨리 이를 ATC에 알려야 한다. 예를 들어, “N1234, failure of GPS system, unable RNAV, request amended clearance.” RNAV/RNP procedure를 비행하기 위해선 항법 데이터베이스에서 해당 절차의 명칭을 검색할 수 있어야 하며 차트의 절차를 준수해야 한다. RNAV/RNP procedures에서 데이터베이스 waypoints를 수정하는 것, 혹은 user-defined waypoints를 생성하는 것은 허용되지 않는다(단, ATC clearance/instruction을 준수하기 위해 altitude constraint 및/혹은 airspeed constraint를 변경하는 경우, 혹은 ATC instruction을 준수하는데 도움이 되도록 published route를 따라 waypoint를 삽입하는 경우는 제외). 예를 들어, “Climb via the WILIT departure except cross 30 north of CHUCK at/or above FL 210.” 이는 along track waypoint construction이 가능한 시스템에만 해당된다.
항법 업데이트를 위해 DME/DME를 사용하는 항공기의 조종사는 NOTAM, ATIS, 혹은 ATC advisory를 통해 특정 DME stations가 운영 중인지를 확인해야 한다. DME/DME의 항법 업데이트는 performance standards를 충족하기 위하여 특정 DME 시설을 필요로 할 수 있다. DME는 IRU나 GPS가 없이는 모든 곳에서 DME/DME/RNAV operations를 지원하기에 충분하지 못하다. [그림 1-28] DP 차트의 notes는 RNAV departure procedure의 형식, 특정 유형의 장비, 시스템, 그리고 성능 조건에 대한 운영 정보를 포함할 수 있다.
RNAV 구간을 운항하는 동안 flight director를 lateral navigation mode로 사용하는 것이 권장된다. ATC가 radar vectors를 발부할 경우, 혹은 waypoint로 직접 향하는 clearances를 발부할 경우 RNAV terminal procedures가 수정될 수 있다. 조종사는 절차에 다시 진입하는 것에 대비하여 active “legs” page에서 waypoints를 너무 일찌감치 삭제하지 않도록 해야 한다. RNAV 구간에서 /R aircraft를 운항하는 조종사는 절차에서 지정하는 RNP 값을 유지하는데 필요한 모든 flight manual limitation을, 혹은 operating procedures를 준수해야 한다.
항법 시스템이 GPS의 손실을 자동으로 경고하지 않는다면 항공기 운영자는 올바른 GPS 작동을 확인할 수 있는 절차를 개발해야 한다. GPS가 장착되지 않은 경우, 혹은 GPS의 손실을 경고하지 않는 multi-sensor systems를 장착한 경우 항공기는 DME/DME나 DME/DME/IRU를 통해 항법 업데이트를 할 수 있어야 한다. RNAV ODPs에 대한 운영 지침으로 AC 90-100을 사용할 수 있다. FMS를 갖춘 항공기의 조종사가 RNAV DP procedure를 할당받은 후 활주로, transition, 혹은 절차의 변경을 수신하였다면 적절한 변경 사항이 로딩 되었는지를 확인해야 한다. [그림 1-29 및 1-30]
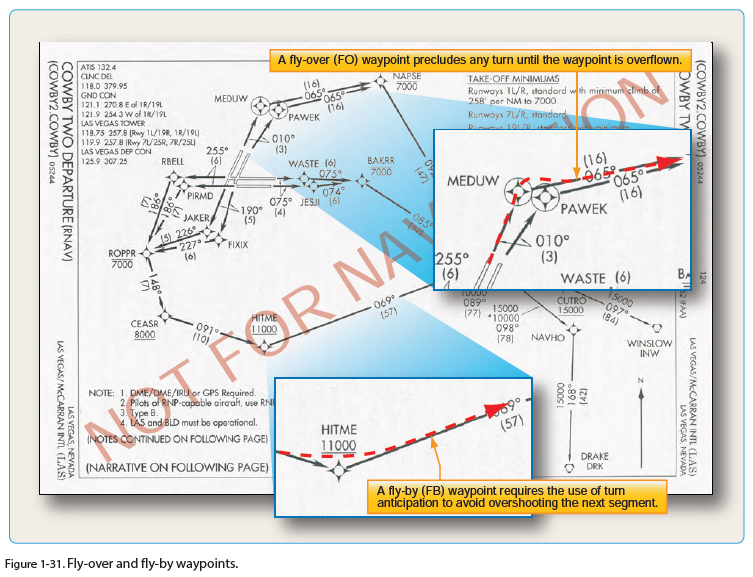
또한 새로운 waypoint 기호들이 RNAV charts와 함께 사용된다. 현재 두 가지 유형의 waypoints가 사용되고 있다: fly-by(FB)와 fly-ver(FO). FB waypoint는 보통 course의 변경이 발생하는 지점에서 사용된다. 차트는 이러한 지점들을 별 모양으로 표시한다. 이러한 유형의 waypoints는 해당 지점 도달 전에 선회를 허용함으로써 원활한 전환을 제공한다. 반면 FO waypoint는 원으로 둘러싸인 별 모양으로 표시된다. 이러한 유형의 waypoint는 missed approach point, missed approach holding point, 혹은 기타 특정 지점을 나타내는데 사용된다. [그림 1-31] 조종사는 데이터베이스의 waypoint 유형을 FB에서 FO로, 혹은 FO에서 FB로 변경해서는 안 된다.
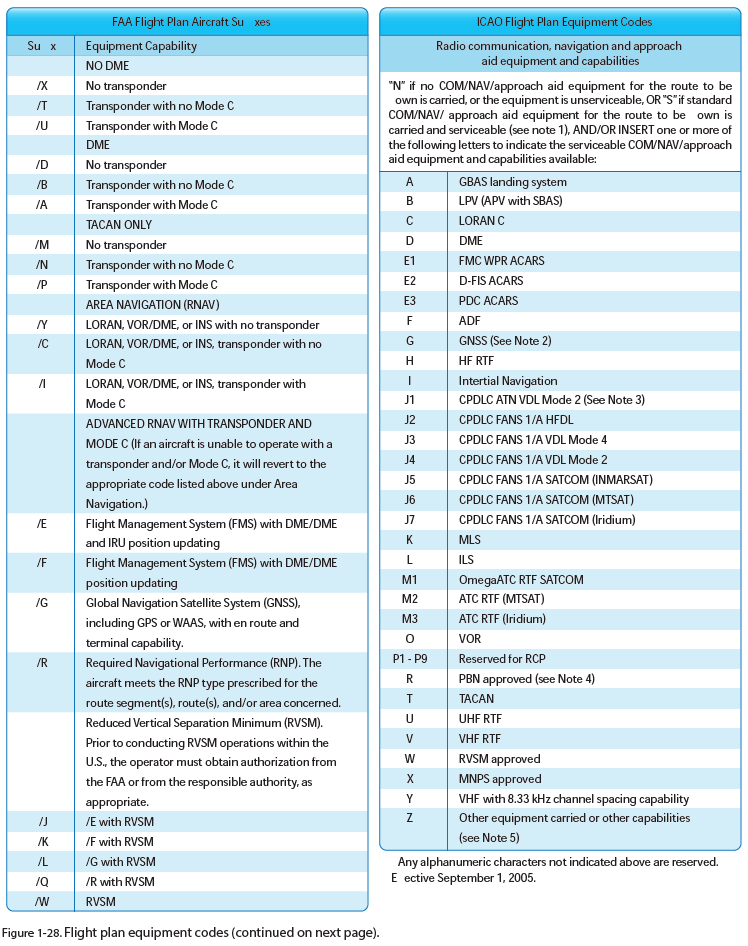
RNAV procedures를 사용하기 전에 충족해야 할 특정 조건들이 있다. 모든 RNAV departure chart는 notes를 나열하며 여기에는 특정 장비, 성능 조건, 그리고 RNAV departure procedure 유형이 포함될 수 있다. 비행계획서 제출 시 진보된 RNAV 항법 기능을 나타내기 위하여 새로운 aircraft equipment suffix codes가 사용된다. [그림 1-32]
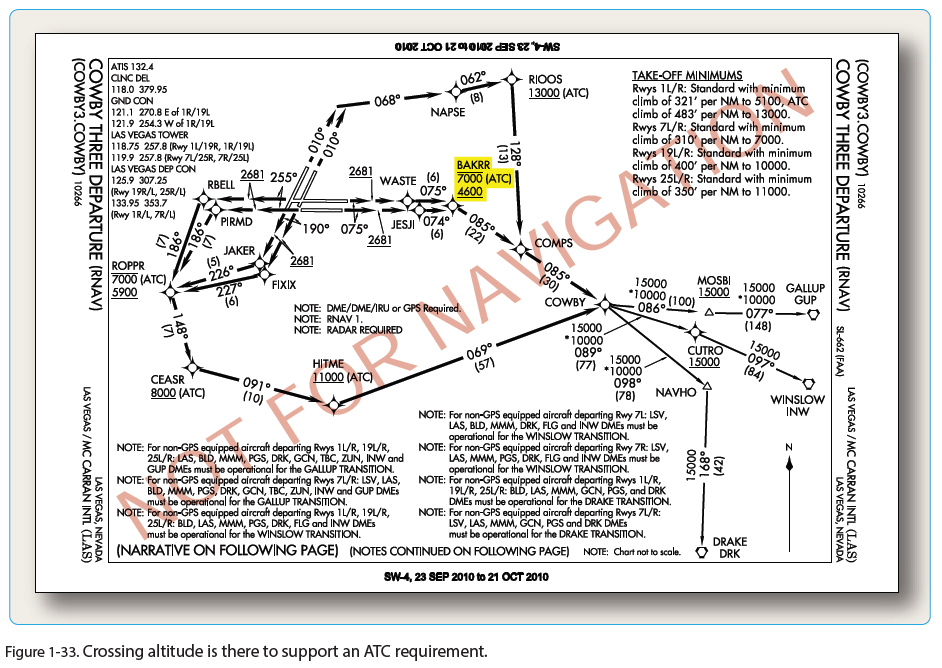
SID Altitudes
SID 고도들은 네 가지 방법으로 차트에 표시될 수 있다: mandatory altitudes, minimum altitudes, maximum altitudes, 그리고 combination of minimum and maximum altitudes(block altitudes라고도 불림). 다음은 각 고도가 SID chart에 어떻게 표시되는지를 나타내는 예시이다.
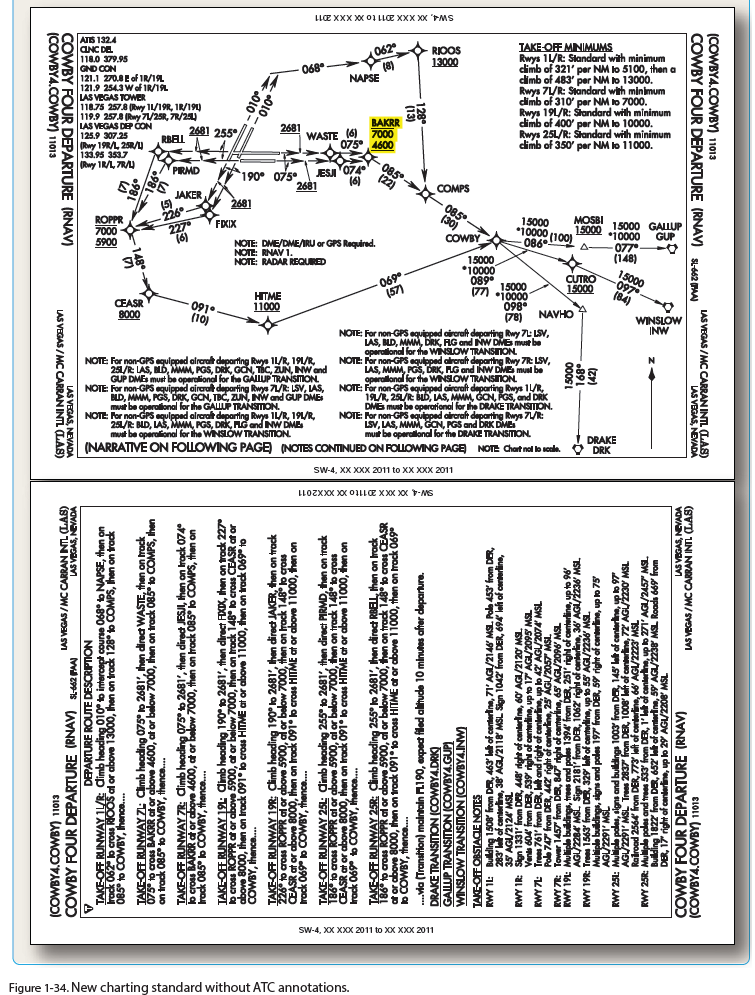
일부 SID의 crossing altitude 옆에 “(ATC)”가 표시되어있을 수 있다. [그림 1-33] 이는 crossing altitude가 ATC 조건을 지원하기 위하여 존재함을 의미한다. 새로운 차트 표준으로 인하여 ATC annotation은 점점 제거되고 있다. 그림 1-34의 Cowboy Four Departure (RNAV)는 ATC annotation이 없는 새로운 차트 표준을 보여준다. 필요한 경우 ATC는 SID crossing altitude restrictions를 수정하거나 제거할 수 있다. 이 경우 항공기가 SID route에 다시 설정되기 전까지는 ATC가 장애물 회피 책임을 가진다.
Pilot Responsibility for Use of RNAV Departures
조종사는 특정 RNP environment를 운항하기 위한 항공기 장비 조건을 명확하게 이해해야 한다. 조종사는 항공기에 설치된 항법 시스템의 유형을 이해하고 해당 시스템이 어떻게 작동하는지 파악함으로써 모든 RNAV 조건들을 준수할 수 있어야 한다. 운영 정보가 AFM이나 그 부속서에 포함되어있어야 한다. 장비 사용 방법에 대한 정보, 그리고 장비 훈련 방법에 대한 정보를 해당 항전장치의 제조업체로부터 얻을 수 있다. 모든 공항에 RNAV 기능을 제공하기 위하여 RNAV departure procedures가 빠른 속도로 개발되고 있다. 이러한 절차들은 traditional navigation-based departures와 동일한 방식으로 비행된다(조종사에게 headings, altitudes, navigation waypoint, 그리고 departure descriptions가 제공됨).
Radar Departures
radar departure는 IFR로 출항할 때 선택할 수 있는 또 다른 선택지이다. 공항에 departure procedure가 없는 경우, departure procedure를 준수할 수 없는 경우, 혹은 비행계획서에 “No SIDs”를 요청한 경우 radar departure를 받을 수 있다. 이때 ATC는 initial departure heading을 발부한다. 관제사는 조종사의 비행경로를 알고 있으므로 특정 위치를 향해 vector를 제공할 것이다. radar departure의 특성상 비행 조정에 대한 책임은 ATC에게 있으며 이는 “resume own navigation” 전까지 이어진다.
사실상 radar departure는 가장 사용하기 쉬운 departure이다. 특히 비행경로에 적합한 departure procedures가 없다면 radar departure가 좋은 대안이 될 수 있다. 허나 ATC로부터 radar vector를 받는 동안 항상 자신의 위치를 인지하는 것이 권장된다. radar contact lost가 발생한 경우 ATC는 비행 진행 상황을 모니터링하기 위하여 위치 보고를 요청한다. 또한 ATC는 기상이나 항적 등 다양한 이유로 인하여 off course로 vector를 제공한 후 “resume own navigation”을 발부할 수도 있다.
initial contact 시 항공기/항공편 번호, 현재 통과 중인 고도, 그리고 상승하려는 고도를 알린다. 관제사는 조종사가 보고한 고도가 트랜스폰더의 고도와 일치하는지 확인한다. 고도가 일치하지 않는 경우, 혹은 Mode C 기능이 없는 경우에는 조종사가 계속해서 위치와 고도를 보고해야 한다.
radar contact가 이루어졌다 하여 관제사가 지형 및 장애물 회피를 제공해야 하는 것은 아니다. 관제사가 radar vectors의 형태로 항법 안내를 제공하기 전까지는 조종사가 지형 및 장애물 회피에 대한 책임을 가진다. radar vectors를 받으면 즉시 할당받은 headings와 altitudes를 준수해야 한다. 할당받은 heading이 정확하지 않은 경우, 혹은 규정을 위반할 수 있다 판단되는 경우에는 즉시 ATC에 알려야 한다.
Diverse Vector Area
ATC는 특정 공항 주변에 MVA(minimum vectoring altitude)를 설정할 수 있다. 이러한 고도는 지형 및 장애물 간격을 기초로 특정 위치의 안팎에서 항공기를 vector 할 수 있는 minimum altitudes를 제공한다. 허나 출항 항공기의 효율적 흐름을 위하여 이러한 고도 미만으로 항공기를 vector 해야 하는 경우도 있다. 이러한 이유로 공항에 DVA(Diverse Vector Area)가 설정될 수 있다. 항공교통시설의 요청에 의해 radar environment 내에서 MVA나 MIA(Minimum IFR Altitude) 미만으로 DVA가 설정될 수 있다. 이러한 유형의 DP는 diverse departures, 장애물, 그리고 지형에 대한 TERPs 기준을 충족한다. 따라서 MVA/MIA 미만에서 출항 항공기에게 random radar vectors가 발부될 수 있다.
DVA의 존재 여부는 U.S. Terminal Procedure Publication (TPP)의 Takeoff Minimums and Obstacle Departure Procedures section에 명시되어 있다. 조종사는 DVA 내에서 200ft/NM을 초과하는 climb gradient가 적용될 수도 있음을 인지해야 한다. 해당 정보는 DVA text에서 확인 가능하다. DVA는 특정 경로를 따르는 departures가 아닌 특정 영역 내를 머무르는 departures에 대해 평가되었다는 점을 유의해야 한다. 또한 ATC가 이전에 할당하였던 DP를 벗어나도록 vector를 제공할 수도 있다. 항상 최소 200ft/NM의 climb gradient가 가정되며(단, 더 높은 climb gradient가 지정된 경우 제외) 관제사가 vectors를 제공하기 전까지는 ATC가 장애물 회피를 제공하지 않는다. 마지막으로 ATC instructions는 ODP보다 우선한다는 점을 이해해야 한다. [그림 1-35]
Visual Climb Over Airport(VCOA)
VCOA는 특정 visibility/ceiling 이상의 VMC를 운항하는 IFR 항공기가 절차의 계기 구간으로 향하는 “climb-to” altitude에 도달하기 전까지 공항 상공에서 상승 선회를 수행하는 departure option이다. VCOA는 공항으로부터 3SM 이상 떨어진 장애물로 인하여 200ft/NM을 초과하는 climb gradient가 필요한 경우에 설정되는 departure option이다.
해당 절차는 TPP의 Take-Off Minimums and (Obstacle) Departure Procedures section에 게재되어 있다. [그림 1-36] VCOA를 수행하는 경우 조종사는 출항 전에 이를 ATC에 알려야 한다.
Noise Abatement Procedures
대부분의 DP는 장애물 회피, 그리고 업무량 감소를 위해 설계되었다. 허나 오직 noise abatement 조건을 준수하기 위해 개발된 SID도 존재한다. [그림 1-37] 보통 소음 규제들은 SID의 본문에 통합된다. 이러한 유형의 규제들은 더 높은 departure altitudes, 더 큰 climb gradients, 낮은 비행속도, 그리고 특정 지역을 피하기 위한 선회를 요구한다. radar departure 도중에도 소음 규제가 발생할 수 있다. ATC는 조종사에게 특정 경로를 벗어나도록, 혹은 특정 지역을 우회하도록 요구할 수 있다. 이러한 제한이 부담스러울지라도 ATC의 요청을 준수하는 것은 조종사의 의무라는 것을 기억해야 한다.
필요한 경우 이륙 후 비행해야할 heading이 departure instructions에 명시된다. 그림 1-37의 경우 “Climb via heading 112 degrees...”가 그 예이다. 일부 절차에서는 “Climb runway heading.”이라 명시되어 있다. 허나 시간이 지남에 따라 이러한 departure instructions가 “Climb heading 112 degrees....”로 업데이트될 것이다. runway heading은 활주로 중심선(airport diagram 참조)과 일치하는 magnetic direction이다. “fly or maintain runway heading”을 받은 조종사는 departure runway의 중심선에 해당하는 heading을 비행해야 하며 이때 편류 수정을 적용하지 않는다(예를 들어 RWY 11의 실제 magnetic heading이 112.2도라면 heading 112를 비행하라). 이는 parallel departures에서 한 대의 항공기만 편류 수정을 적용하는 상황을 방지한다.
비행 계획 도중 고려해야 할 사항은 특정 departure procedure를 차트에 표시된 대로 비행할 수 있는지의 여부이다.
DP Responsibilities
DP의 수행에 대한 책임은 ATC와 조종사에게 달려있다. ATC와 조종사의 주의 없이는 IFR system이 조화롭게 운영될 수 없다.
ATC는 운항에 적절한 clearance를 발부할, minimum IFR altitudes 이상의 고도를 할당할, 조종사가 clearance/instruction을 acknowledge 하였는지 확인할, 그리고 instructions의 올바른 read back을 확인할 책임을 가진다.
조종사는 다음의 책임들을 가지고 있다:
∙ATC clearance의 수신 및 이해를 acknowledge 한다.
∙“hold short” instructions를 포함하는 clearance를 read back 한다.
∙clearances의 설명을 요청한다.
∙안전 측면에서 clearance를 허용할 수 없는 경우 수정을 요청한다.
∙ATC의 요청을 즉시 응한다. clearance에 응할 수 없다면 즉시 ATC에 알린다.
∙all-engines-operating climb gradients와 climb rates를 준수할 수 없다면 즉시 ATC에 알려야 한다. 또한 standard DP나 non-standard DP에서 명시하는 climb gradient를 유지할 수 있어야 한다. standard climb gradient를, 혹은 ODP에서 명시하는 climb gradient를 유지할 수 없다면 VMC 전까지 출항을 기다려야 한다.
departure 계획 시 조종사는 다음을 수행해야 한다:
∙공항 주변의 지형 및 기타 장애물을 고려한다.
∙육안으로 장애물 회피를 유지할 수 있는지, 혹은 DP를 사용해야 하는지를 결정한다.
∙출항 공항에서 ODP나 SID를 사용할 수 있는지를 확인한다.
∙DP가 없는 공항을 안전하게 출항할 수 있는 방법을 결정한다.
DP를 준수하기만 하면 장애물 회피가 보장된다. departure의 유형에 따라 장애물 회피와 항적 분리에 대한 책임이 조종사와 관제사간에 공유될 수 있다.
Departures From Tower-Controlled Airports
tower-controlled airport에서 출항하는 것은 non-towered airport에서 출항하는 것에 비해 비교적 간단하다. 보통 조종사는 ground control이나 clearance delivery를 통해 IFR clearance를 요청한다. 다양한 관제 주파수들이 departure chart, approach chart, 그리고 airport chart에 표시되어 있다. 일부 공항의 경우 조종사는 pre-taxi clearance를 받을 수도 있다. 해당 프로그램을 통해 조종사는 taxi operations를 시작하기 최대 10분 전에 ground control/clearance delivery와 교신하여 IFR clearance를 받을 수 있다. Part 121/135 operators의 경우 PDC(pre-departure clearance) program을 이용할 수 있다. 이는 조종사로 하여금 운항관리사, 혹은 데이터 링크 통신 서비스 제공업체(예를 들어 ARINC)로부터 데이터 링크를 통해 clearance를 받을 수 있게 해준다. 운항관리사는 clearance를 받은 다음 이를 조종사에게 전달한다. 이는 clearance delivery 주파수의 혼잡을 줄여준다. clearance를 받은 후 조종사는 해당 지시를 따라야 할 책임이 있으며 만약 해당 지시를 준수할 수 없다면 ATC에 알려야 한다. clearance를 이해하지 못한 경우, 혹은 clearance의 일부를 놓쳤다고 생각하는 경우 즉시 ATC에 설명을 요청해야 한다.
Departures From Airports Without an Operating Control Tower
평소와 마찬가지로 최소 30분 전에 비행 계획서를 제출한다. 비행 계획 도중 출항 공항에서 instrument clearance를 받는 방법을 조사한다. 지상에서 FSS(Flight Service Station)에 전화하면 해당 센터가 ATC에게 clearance를 요청할 수 있다. 보통 이러한 방식으로 clearance를 받으면 clearance에 void time이 포함된다. 조종사는 clearance void time 전에 공항을 출항해야 한다. 만약 출항을 하지 못하였다면 조종사는 특정 시간(void time으로부터 30분 이내) 전에 ATC에 연락해야 한다.
non-towered airport에서 clearance를 받을 수 있는 또 다른 방법이 있다. 라디오를 통해 FSS나 ATC와 교신할 수 있다면 조종사는 departure clearance를 요청할 수 있다. 허나 이러한 주파수들은 보통 매우 혼잡하므로 clearance를 받지 못할 수도 있다. 또한 조종사는 RCO(Remote Communications Outlet)을 통해 FSS와 교신할 수도 있다. 일부 공항에서는 UNICOM operators가 조종사를 대신하여 ATC와 교신한 다음 clearance를 전달해줄 수도 있다. 또한 가능하다면 VFR로 출항한 다음 공중에서 ATC 시설과 교신하여 clearance를 요청할 수도 있다.
Ground Communication Outlet
non-towered airports를 드나드는 조종사가 VHF radio를 통해 ATC와 AFSS에 교신할 수 있는 기능을 제공하기 위하여 GCO가 개발되었다. 이를 통해 조종사는 instrument clearance를 받거나, 혹은 VFR/IFR 비행계획서를 종료할 수 있다. 가장 가까운 ATC 시설에 교신하기 위해 라디오 키를 네 번 누르거나, 혹은 AFSS에 교신하기 위해 라디오 키를 여섯 번 누른다. 이러한 기능은 지상 운영 도중 사용되도록 고안되었다.
See and Avoid Techniques
기상 조건이 허용된다면 항적, 지형, 그리고 기타 장애물을 피하기 위하여 “see and avoid”를 사용해야 한다. 출항 구간의 장애물 회피를 위하여 takeoff minimums가 non-standard ceiling/visibility minimum을 포함할 수 있다. 이를 통해 조종사는 특정 climb gradient를 만족하지 않아도 공항을 출항할 수 있다. 대신 조종사는 출항 경로의 장애물들을 see and avoid 해야 한다. 이러한 상황에서 ATC는 업무량이 허용하는 한 레이더 항적 정보를, 그리고 safety alerts를 제공한다.
VFR Departures
차후에 마주칠 기상으로 인하여 현재 VFR임에도 IFR 비행 계획서를 제출해야 하는 경우가 있을 수 있다. VFR로 출항한 후 즉시 IFR clearance를 받아야 할 수도 있다. IFR system의 time slot을 기다리지 않고도 출항할 수 있는 수단으로 VFR departure가 사용될 수 있다. 허나 공중에서 IFR clearance를 받으려는 의도로 VFR departure를 수행하는 것은 위험을 초래할 수 있으므로 신중하게 고려되어야 한다.
VFR departure는 조종사와 ATC의 책임에 큰 변화를 가져온다. VFR departure를 위한 clearance를 받았다면 출항이 허가된다. 허나 조종사는 다른 항적과의 간격을 유지해야 한다. 또한 조종사는 지형 및 장애물 간격을 유지해야 할, 그리고 VFR weather conditions를 유지해야 할 책임을 가지고 있다. IFR clearance를 받지 않고선 IMC에서 비행할 수 없다. VFR departure는 이러한 의무들에 대한 ATC의 책임을 완화해주며 업무량이 허용하는 한 safety alerts만 제공하도록 요구된다.
IFR clearance를 받은 후 해당 clearance에 따라 course를 진행하도록 승인받기 전까지는 VFR을 유지한다. clearance를 수락하였으나 현재 minimum IFR altitude 미만이라면 해당 고도에 도달하기 전까지는 조종사가 지형/장애물 간격에 대한 책임을 가진다.
en route 구간은 departure procedure의 종료 지점으로부터 arrival procedure의 시작 지점까지로 정의된다. en route 구간에서 사용되는 절차는 14 CFR [그림 2-1], FAA Order 8260.3, 그리고 관련 간행물들에 의해 제정된 일련의 비행 표준을 적용 받는다. 이러한 표준들은 비행경로, 장애물 회피 기준, minimum altitudes, 항법 성능, 그리고 교신 조건을 설정한다.
en route IFR(instrument flight rules) navigation은 ground-based NAVAID system에서 satellite-based system으로 발전하고 있다. 현대의 시스템은 거의 모든 비행 운영 조건에 맞춰 경로를 생성할 수 있다. GNSS(Global Navigation Satellite System)는 인공위성 기반의 위치, 항법, 그리고 시간 서비스를 제공하여 모든 비행 구간에서 performance-based operations가 가능하게 해준다.
14 CFR Part 91, 91.181은 비행경로의 기준을 다룬다. 관제 공역 내에서 IFR로 항공기를 운항하기 위해선 조종사는 항로의 중심선을 따라(Federal airway를 비행하는 경우), 혹은 NAVAIDs나 Fixes 사이의 direct course를 따라(Federal airway가 아닌 경로를 비행하는 경우) 비행해야 한다(단, ATC가 달리 인가한 경우 제외). 또한 규정은 항적 회피를 위한 기동을 허용하며 VMC(visual meteorological conditions)인 경우에는 상승/하강 도중 비행경로를 개방하기 위한 기동을 허용한다.
Airways
airway routing은 항로라 불리는 특정 경로를 따라 발생한다. 항로는 항공기를 위한 3차원의 고속도로라 생각될 수 있다. 대부분의 지역에서 항공기는 출항 공항과 도착 공항 사이의 항로를 비행해야 한다. airway routing을 관리하는 규정인 SID(Standard Instrument Departures)와 STAR(Standard Terminal Arrival)은 고도, 속도, 그리고 항로 진입/이탈 조건을 다루는 비행 절차이다. 대부분의 항로는 8NM의 폭을 가진다. 항로를 VFR로 운항하는 경우 airway flight levels는 위/아래 항공기와 최소 500ft의 분리를 유지한다. 항로를 IFR로 운항하는 경우 모든 항공기들은 지표면과 FL 290 사이에서 1,000ft 미만으로 근접해서는 안 된다. FL 290을 초과하는 고도에서는 모든 항공기들은 2,000ft 미만으로 근접해서는 안 된다(단, RVSM이 적용될 수 있는 공역은 제외. 이 경우에는 수직 분리가 1,000ft로 감소됨). 항로들은 보통 하나의 항로에서 다른 항로로 변경할 수 있는 지점으로 임명된 NAVAIDs에서 교차한다. 항로들은 한 개의(혹은 두 개의) 문자와 1 ~ 999의 숫자로 구성된 이름을 가지고 있다(예를 들어 V484나 UA419).
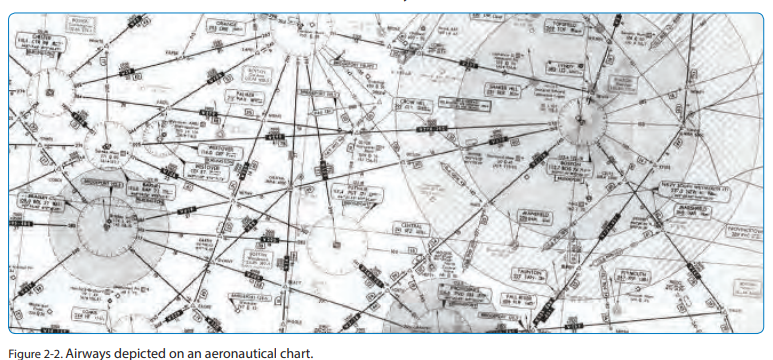
NAS(National Airspace System)의 en route airspace structure는 세 개로 구성되어 있다. low altitude airways는 문자 V로 시작하는 이름을 가지고 있으며 Victor Airways라 불린다. [그림 2-3] 해당 경로들은 대략 1,200ft AGL(above ground level) ~ 18,000ft MSL에서 운영된다. high altitude airways는 문자 J로 시작하는 이름을 가지고 있으며 Jet Routes라 불린다. [그림 2-4] 해당 경로들은 18,000 ~ 45,000ft에서 운영된다. random operations는 FL(flight level) 450을 초과하는 고도에서 수행된다. low/high airway structure를 구분하는 고도는 나라마다 다르다.
Air Route Traffic Control Centers
FAA는 관제 공역 내에서(특히 en route 구간에서) IFR 비행계획서로 운항중인 항공기에게 ATC(air traffic control) 서비스를 제공하기 위하여 ARTCC(Air Route Traffic Control Center)를 설정하였다. 장비 성능과 관제사 업무량이 허용한다면 VFR 항공기에게 특정 advisory/assistance services가 제공될 수 있다.
ARTCCs는 보통 Centers라 불린다. ARTCC의 공역 내에서 IFR로 운항중인 모든 항공기는 Center로부터 관제를 받는다. [그림 2-5]
그림 2-6은 Boston ARTCC의 예시이다. 녹색 선은 Boston Center area를 나타내며 빨간색 선은 군작전구역(MOA), 금지구역, 제한구역, 경계구역, 그리고 위험구역을 나타낸다.
Safe Separation Standards
항공기를 관제하는 주요 수단은 정교한 레이더 시스템을 통해 이루어진다. 또한 관제사는 해당 구역 내의 항공기와 양방향 무선 교신을 유지한다. 이를 통해 관제사는 항공기가 다음 기준에 따라 분리되도록 만든다:
∙가로
– 5마일
∙수직
- 1,000ft(단, 항공기가 FL 290 미만일 때, 혹은 RVSM 항공기의 경우 FL 290 ~ FL 410)
- 2,000ft(단, 항공기가 FL 290 이상인 경우)
관제사는 조종사에게 instructions를 발부함으로써 이러한 분리를 만들 수 있다. 고도 할당, 속도 조절, 그리고 radar vectors가 이러한 instructions의 예이다.
en route 관제는 flight progress strips를 통해 항공기 위치를 정확히 파악함으로써 처리된다. 이러한 strips는 조종사의 비행계획서 정보들이 포함된 종잇조각이다. 항공기가 각 Center의 섹터에 도착하기 20분 전에 strips가 인쇄된다. flight progress strip은 해당 항공기를 관제하는데 필요한 모든 정보를 제공한다. 섹터에 접근하는 각 항공기의 flight progress strips가 올바르게 정렬된 경우 항공기가 센터 화면에 표시되기 전에 잠재적 충돌 가능성을 판단할 수 있다. 레이더를 이용할 수 없는 지역에서는 이 방법이 항공기를 분리하는 유일한 수단이다.
flight progress strips는 slotted board에 게재된다. [그림 2-7] 관제사는 다음과 같은 중요한 정보를 한 눈에 확인할 수 있다: 항공기의 형식 및 조종사(airline, business, private, 혹은 military), 항공기 등록부호나 편명, 경로, 속도, 고도, 항로, 그리고 목적지 ETA. 비행이 진행됨에 따라 초기 비행계획서로부터 변경된 사항들이 strips에 기록된다. 따라서 관제사는 flight progress board를 통해 전반적 교통 상황을 평가할 수 있으며 충돌 가능성을 피할 수 있다.
Sectors
Center가 관제하는 공역은 섹터라 불리는 작은 공역으로 세분화될 수 있다. 대부분의 섹터들은 다양한 항적들을 수용하기 위하여 여러 단계로 층을 이룬다. 각 섹터는 관제사와 조종사의 교신에 사용되는 고유 무선 주파수를 갖추고 있다. 항공기가 한 섹터에서 다른 섹터로 전환할 때 다음 섹터의 무선 주파수로 변경하라는 지시를 받는다.
Forth Worth, Texas의 ARTCC는 다음과 같은 섹터들로 세분화되어 있다:
∙18개의 low altitude sectors. [그림 2-9]
∙7개의 intermediate altitude sectors. [그림 2-10]
∙16개의 high altitude sectors. [그림 2-11]
∙1개의 ultra high altitude sectors. [그림 2-12]
Center 관제사들은 다양한 의사 결정 지원 수단(컴퓨터 소프트웨어 프로그램)을 보유하고 있다. 이는 해당 구역을 비행 중인 모든 항공기들의 분리 거리를 유지하는데 도움이 되는 중요한 정보를 제공한다. 예를 들어 관제사는 vector line이라 불리는 수단을 통해 모든 항공기의 연장 경로를 레이더 화면에 표시할 수 있다. 이러한 연장 경로는 특정 시간(분) 내에 항공기가 어디에 위치할지를 예측한다(단, 항공기가 경로를 변경하지 않는다 가정). 이는 교차 경로를 비행하는 항공기가 separation standard 이내에서 안전하게 통과하는지, 혹은 서로 충돌하는지의 여부를 판단하는데 유용하다. 또한 관제사는 레이더 화면에 특정 항공기의 route line을 표시할 수도 있다. 이를 통해 관제사는 특정 시간(분) 내에 특정 항공기가 어디에 위치할지를 알 수 있을 뿐만 아니라 해당 지점에 도달하기 위해 항공기가 비행할 경로도 알 수 있다. 이러한 의사 결정 지원 수단들은 관제사로 하여금 앞을 내다보도록, 그리고 충돌을 회피하도록 돕는다.
In-flight Requirements and Instructions
관제 공역을 IFR로 운항중인 조종사는 적절한 Center 주파수나 관제 주파수를 모니터링 해야 한다. IFR 항공편은 이륙 후 상승 도중 departure control과, 혹은 일부 지역의 경우 ARTCC와 교신한다. en route 구간으로 전환될 때 조종사는 보통 departure control에서 Center 주파수로 이양된다.
하나의 Center에서 다른 Center로 이양될 때 관제사는 새로운 주파수를 할당한다. 허나 종종 이전 Center의 주파수 범위를 벗어난 후에 다음 Center와 교신하지 못할 수도 있다. 이 경우 차트 앞면의 Center 주파수가 큰 도움이 될 수 있다. 그림 2-13은 Memphis, Tennessee Center와 Atlanta, Georgia Center의 경계선을, 그리고 remote sites와 해당 VHF/UHF 주파수를 표시한다. 이러한 Center frequency boxes는 항공기 범위 내 가장 가까운 주파수를 찾는데 사용될 수 있다. 또한 clearances를 위한 Center와의 initial contact를 위해서도 사용될 수 있다.
하나의 Center에서 다음 Center로 전환하는 도중 앞서 설명한 관제 이양이 필요하다. 이양 절차는 기타 레이더 시설(예를 들어 departure control이나 approach control)간의 이양과 유사하다. 이양 도중 관제사는 교신할 시설의 명칭, 적절한 주파수, 그리고 기타 사항을 포함하는 instructions를 발부한다.
관제사로부터 radar vectors를 수락한다 하여 비행 안전에 관한 조종사 책임이 완화되지는 않는다. 조종사는 안전한 고도를 유지해야 하고, 본인의 위치를 추적해야 하며, 비행 안전이 의심스럽다 판단되는 경우 관제사에게 질문하거나, amended clearance를 요청하거나, 혹은 비상 상황이라면 관제사의 instructions로부터 벗어나는 것이 조종사의 의무이다. 모든 비행 구간 도중 고도, 그리고 위치를 추적하는 것은 상황 인식의 기본 요소이다. EGPWS(enhanced ground proximity warning system), TAWS(terrain awareness and warning system), 혹은 TCAS(traffic alert and collision avoidance system)를 갖춘 항공기는 조종사로 하여금 다른 항적과의 근접 가능성을 탐지하도록, 그리고 상황 인식이 높아지도록 돕는다. 장비에 관계없이 조종사는 자신의 위치, 그리고 근처 항적의 위치에 대하여 상황 인식을 유지해야 한다.
High Altitude Area Navigation Routing
special high altitude routes를 통해 조종사는 HAR(high altitude routing) Phase I expansion airspace를 비행할 수 있다. 조종사는 HAR airspace 내의 pitch fix와 catch fix를 통해 NRR(non-restrictive routing)이라 불리는 user-preferred routes를 비행할 수 있다. pitch points는 departure procedures, preferred IFR routings, 혹은 기타 routing programs의 종료 지점을 나타내며 이 지점에서 NRR이 시작될 수 있다. catch point는 NRR의 종료 지점을 나타내며 이 지점에서 arrival procedures, preferred IFR routing, 혹은 기타 routing programs가 시작된다.
HAR Phase I expansion airspace는 서부 및 남부 ARTCC 내 FL 350 이상의 공역으로 규정된다. 비행계획서를 제출하기 위해 Phase I airspace를 통과하는 경로를 기준으로 pitch point와 catch point를 선택한다. pitch point와 catch point 사이의 구간에서는 NRR이 허용된다. 특정 공항의 pitch points가 확인되지 않는 경우 조종사는 NRR 구간 이전에 적절한 departure procedure(DP)를, 혹은 기타 user preferred routing을 제출해야 한다. 특정 공항의 catch points가 확인되지 않는 경우 조종사는 NRR 구간 이후에 적절한 arrival procedure를, 혹은 기타 user preferred routing을 제출해야 한다.
SUA(special use airspace)와 ATCAA(Air Traffic Control Assigned Airspace)의 위치, 그리고 일정에 대한 정보는 https://sua.faa.gov/에서 확인할 수 있다. ATCAA는 군사 작전과 기타 특수 작전을 지원하는 고고도 공역을 의미한다. 이러한 구역이 활성화될 예정인 경우 조종사는 해당 구역 주변을 빙 둘러서 비행하도록 권장된다.
en route flight environment의 특정 부분에서 항공 교통의 체계적 흐름을 제공하기 위하여 area navigation(RNAV) routes가 설정되었다. 이러한 경로들의 명칭은 문자 Q로 시작한다(예를 들어 Q-501). 해당 경로가 항공 교통의 질서 관리에 도움이 되는 경우 이는 preferred IFR routes로 게재된다.
Preferred IFR Routes
시스템 효율성과 수용력을 증가시키기 위하여 복잡한 공항들 사이에 preferred IFR routes가 설정되었다. 이들은 보통 하나 이상의 ARTCC areas를 통과한다. IFR clearances는 이러한 경로를 기준으로 발부된다(단, 악기상 회피 절차나 그 외 요인들로 인해 달리 결정되는 경우 제외). preferred IFR routes는 Chart Supplements에 나열되어 있다. [그림 2-14] 이러한 경로를 갖춘 지역을 오가는 비행이 계획되어 있으나 출발 지점이나 도착 지점이 Chart Supplements에 나열되어 있지 않는 경우 조종사는 적절한 preferred IFR route의 해당 구간을 사용할 수 있다. preferred IFR routes는 DPs(departure procedures), 그리고 STARs와 관련되어 있다. preferred IFR routes는 airways, jet routes, NAVAIDs 사이의 direct routes, waypoints, NAVAID radials/DME, 혹은 이들의 조합에 의해 규정될 수 있다.
preferred IFR routes는 low와 high로 게재된다. preferred IFR routes가 airway로 시작되거나 종료되는 경우 이는 해당 airway가 공항 상공에 위치함을, 그리고 해당 airway로 직접 향하도록 비행이 승인됨을 나타낸다. preferred IFR routes가 fix에서 시작되거나 종료되는 경우 이는 조종사가 SID route, radar vectors, 혹은 STAR를 통해 해당 fix를 오가는 경로를 이용할 수 있음을 나타낸다. 대형 공항의 preferred IFR routes는 출항 공항의 이름 아래에 알파벳순으로 나열된다. 여러 공항이 인접한 경우에는 주요 공항의 아래에 preferred IFR routes가 나열되며 metropolitan area(예를 들어 New York Metro Area)로 분류된다. 출발 지점이나 도착 지점에 관계없이 특정 구간에 대해 한 방향으로만 사용되는 preferred IFR routes는 segment fixes, direction, 그리고 time을 표시한다. preferred IFR routes가 두 개 이상 나열된 경우 경로의 사용 우선순위는 동일하다. 경로 설명을 위해 VOR이나 VORTACs가 사용되는 경우 공식 위치 식별자가 표기되며 intersection의 경우 철자가 생략 없이 표기된다. 두 개의 NAVAIDS, intersection과 NAVAID, 혹은 NAVAID와 NAVAID radial/distance point가 연속으로 나열된 경우 해당 경로는 direct course이다. 모든 조종사들이 preferred routes를 제출하는데 협조할 경우 교통 지연이 줄어들며 departure∙en route∙arrival air traffic service의 효율성이 향상된다. [그림 2-15]
Substitute Airway or Route Structures
ARTCC는 계획된, 혹은 계획되지 않은 VOR/VORTAC 중단 도중 사용할 substitute airway/route segments(sub-routes)와 fixes를 지정할 책임을 가진다.
Substitute Airway En Route Flight Procedures
substitute routes가 게재되기 위하여 시설 중단 일정은 최대한 미리 전달된다. substitute routes는 보통 해당 고도에서 사용되도록 설정된 VOR/VORTAC을 기반으로 한다. 고고도에 substitute routes를 설정하는 경우 저고도에서 사용되는 VOR/VORTAC을 기준으로 경로를 설정해야 할 수도 있다. VOR/VORTAC 범위가 불충분하며 ATC 조건이 NDB를 필요로 하는 경우에는 해당 시설이 사용될 수 있다. 운영상 필요한 경우 NAVAIDs가 SSV(standard service volume) 한계를 초과하여 사용될 수 있다.
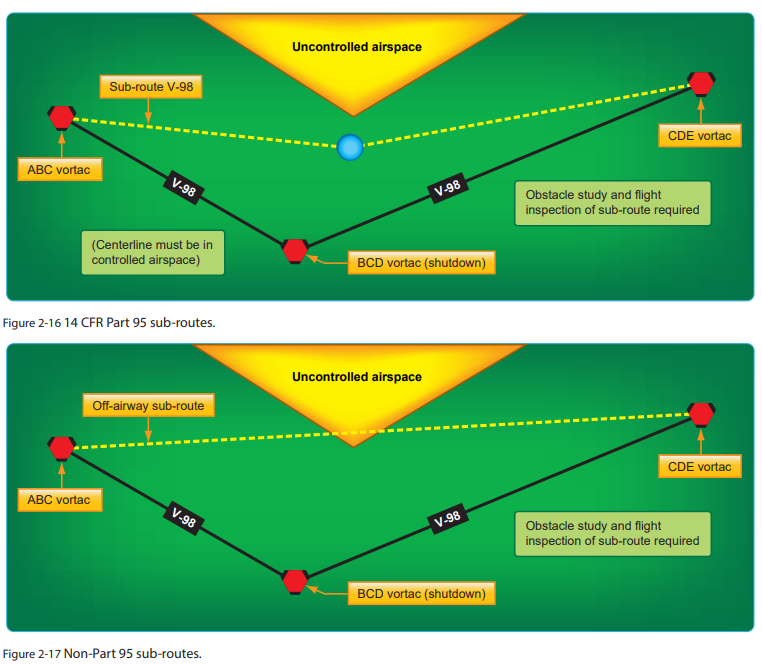
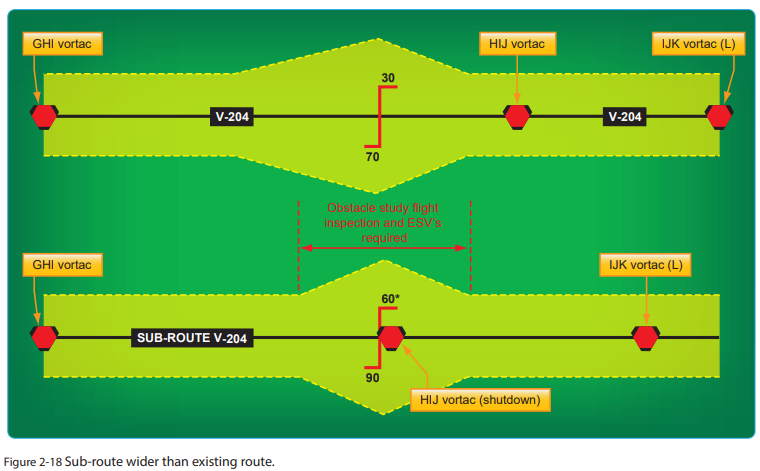
substitute routes의 중심선은 관제 공역 내에 포함되어야 한다. [그림 2-16] 허나 off-airway routes의 substitute routes는 관제 공역 내에 포함되지 않을 수도 있다. [그림 2-17] substitute routes는 controlling obstacles와의 간격을 위해, 그리고 만족스러운 시설 성능을 위해 비행 검사를 받는다. substitute routes가 existing routes와 겹치지 않는 경우, 혹은 existing routes보다 더 넓은 경우엔 controlling obstacles를 식별하기 위한 조사가 필요하다. [그림 2-18] substitute routes는 navigational fix에서 navigational fix로 형성된다. MEA(minimum en route altitude)와 MAA(maximum authorized altitude)가 각 구간마다 제공된다. temporary reporting points는 서비스 중단 시설로, 혹은 ATC에 필수적인 그 외 보고 지점으로 대체될 수 있다. Center의 레이더 범위 내에 있다면 보통 intersections 상공에서 temporary reporting points가 필요하지 않다. 각 temporary reporting point에 MRA(minimum reception altitude)가 설정된다.
Tower En Route Control
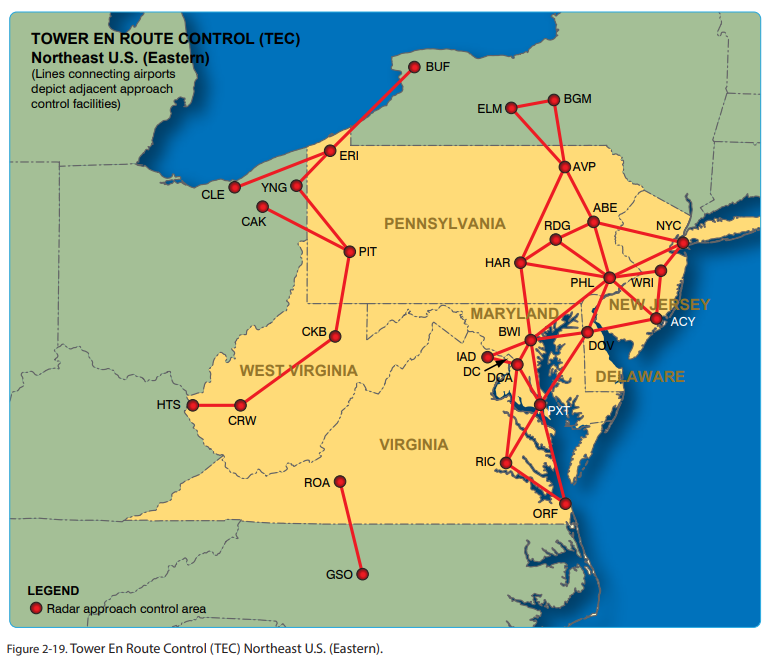
TEC는 대도시 지역을 오가는 조종사가 이용할 수 있는 ATC 프로그램이다. 이 프로그램은 기존의 airway structure로 구성된 경로 네트워크를 통해 특정 approach control areas를 연결한다. 이는 approach control airspace를 벗어나지 않고도 IFR 비행을 수행할 수 있게 해준다. [그림 2-19] 해당 서비스는 항공 교통을 신속히 처리하도록, 그리고 ATC와 조종사의 교신 조건을 줄이도록 설계되었다. 이 프로그램은 보통 10,000ft 이하를 운항하는 non-turbojet aircraft가 사용한다. 허나 일부 시설에서는 turbojets의 운항도 허용하고 있다. 프로그램에 참여하는 항공편들의 비행시간은 2시간 이하로 비교적 짧다.
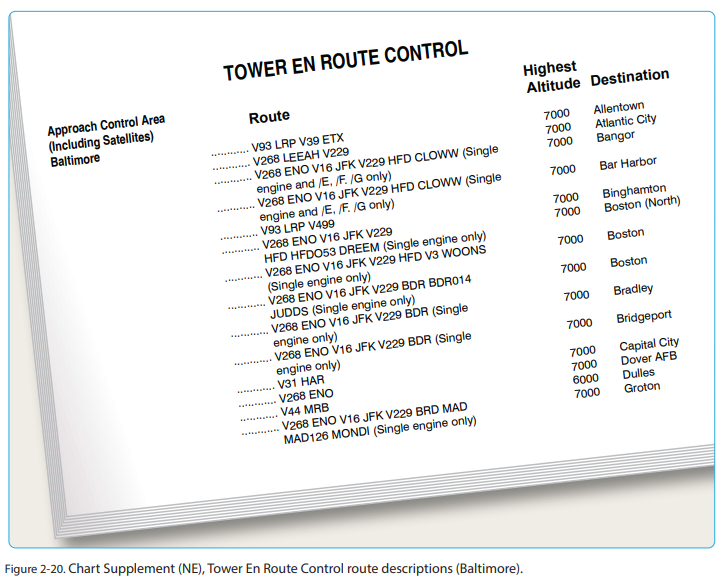
TEC는 tower en route, 혹은 tower-to-tower라고도 불린다. 이는 en route structure 아래에서 비행할 수 있도록 허용한다. TEC는 approach control airspace에 머물면서 특정 지점간의 비행 계획이 세워지도록 공역을 재분배한다. 사용자는 비행계획서를 제출할 때 Chart Supplements의 TEC route를 사용하도록 권장된다. [그림 2-20] 모든 TEC routes는 en route airspace를 피하도록 설계되었으며 대부분이 레이더 범위 이내에 놓인다.
Tower En Route Control Route Descriptions
Chart supplements의 TEC routes 그림을 항법, 혹은 비행 계획에 사용해서는 안 된다. 왜냐하면 모든 도시 쌍(출발 공항/도착 공항)들이 표시된 것은 아니기 때문이다. 해당 정보는 TEC로 연결된 지리적 영역들을 보여주기 위한 것이다. [그림 2-19] 구체적인 비행계획을 위해서는 route descriptions를 참조해야 한다.
route description은 네 가지 정보를 포함한다. [그림 2-20] 첫 번째 열은 출발 공항이 위치한 approach control area를 알파벳순으로 나열한다. 두 번째 열은 특정 route, airway, 혹은 radial을 표시한다. 세 번째 열은 경로에 대해 허용되는 최대 고도가 표시된다. 네 번째 열은 도착 공항을 알파벳순으로 나열한다. 비행 계획 시 항상 출발 공항 및 도착 공항과 관련하여 최신 간행물을 확인하는 것이 중요하다. 경로들은 각 터미널 시설의 정상 운영 시간에만 유효하다. 항상 NOTAMs를 확인하여 특정 비행시간 도중 적절한 터미널 시설이 운영되고 있는지를 확인해야 한다. 고도는 항상 천 피트 단위로 표시된다. ATC는 항공기를 approach control airspace 이내로 유지하기 위하여 조종사에게 고도 변경을 요청할 수 있다. ATC는 레이더 모니터링을 제공하며 필요하다면 course guidance를(할당된 최대 고도가 MEA 미만인 경우) 제공한다.
radar vectors가 사용되는 경우, 혹은 airway가 존재하지 않는 경우엔 경로에 “direct”이라는 단어가 표시된다. [그림 2-21] 이는 ATC가 SID나 STAR를 할당할 수 있음을 나타낸다. NAVAID나 intersection의 바로 앞뒤에 airway가 존재하지 않는 경우 이는 direct route를 의미한다(단, ATC가 달리 승인한 경우 제외). airway에서 시작 및 종료되는 경로의 경우 이는 airway가 공항 상공에 위치함을, 혹은 radar vectors가 발부됨을 나타낸다. 둘 이상의 경로가 동일한 도착 공항을 향하여 나열된 경우 항공기 형식에 대한 올바른 경로가 제출되었는지를 확인한다. 이는 고도에 J(jet powered), M(turbo props/special. 순항속도 190노트 이상), P(non-jet. 순항속도 190노트 이상), 혹은 Q(non-jet. 순항속도 190노트 미만)를 사용하여 표시된다. [그림 2-22] 비록 모든 공항들이 도착 공항에 나열되어 있지는 않지만 동일한 경로를 통해 주요 공항 근처의 satellite airports로 비행이 계획될 수 있다. 비행계획서 제출 시 비행경로 대신 경로 식별자(예를 들어 BURL 1, VTUL 4, 혹은 POML 3)를 사용할 수 있다.