이 장은 소형 다발 비행기와 연관된 요소들을 다룬다. 본 교재의 목적상 "소형(small)" 다발 비행기란 최대 인가 이륙 중량이 12,500파운드 이하인 왕복 엔진 비행기나 터보 프로펠러 비행기를 의미한다. 이 장의 내용은 두 개의 엔진이 각 날개에 하나씩 달린 달린 종래의 디자인을 전제로 하며달리 언급되지 않는 한 왕복 엔진을 전제로 한다. 여기에 사용되는 “light-twin”이라는 용어는 비록 규정에 의해 정식으로 정의되어 있지는 않지만 최대 인가 이륙 중량이 6,000파운드 이하인 소형 다발 비행기를 의미한다.
다발 항공기에 존재하는 몇 가지 고유한 특징 때문에 별도의 등급 한정(class rating)이 필요하다. 이 장에서 다뤄지는 OEI(one engine inoperative) 비행 정보는 다발 비행기와 단발 비행기를 비행하는데 있어 존재하는 상당한 차이점을 강조한다. 허나 어떠한 비행기를 비행하던 모든 조종사들은 본인이 비행하는 비행기를 안전하게 운영할 적절한 지식, 위험 관리 계획, 그리고 기술을 갖춰야 하며 OEI 비행을 숙달하는 것은 안전한 다발엔진 비행의 한 측면일 뿐이다. 장비가 고루 갖춰진 현대의 다발 비행기는 다양한 상황에서 운용될 수 있긴 하지만 성능 및 시스템의 redundancy는 조종사가 훈련을 받고 숙련이 되어야만 안전성을 증가시킨다.
비행기 제조업체는 특정 비행기의 운영 방법에 대한 최종 권위자이다. 비행 교관과 학습자는 Federal Aviation Administration이 승인한 AFM이나 POH를 사용해야 한다. 비행기 제조업체의 지침과 절차는 이 교재에 수록된 일반적인 권고사항보다 우선된다.
다발 비행기와 단발 비행기는 엔진 고장 발생 시 서로 다르게 작동한다. 다발 비행기의 경우 한 쪽 엔진의 추력이 상실되면 성능과 조종이 둘 다 영향을 받는다. 가장 큰 문제는 출력이 50% 손실되는 것으로 이는 상승 성능의 80~90%를 감소시킨다. 경우에 따라 light-twin은 엔진 고장 이후 상승이나 고도 유지를 수행하지 못할 수도 있다. 비대칭 추력 또한 조종사에게 조종 문제를 발생시킨다. 이러한 요소들에 주목하는 것은 안전한 OEI 비행을 위해 매우 중요하다.
단발 비행기의 조종사들은 이미 다양한 performance “V” speed와 이들의 정의에 익숙할 것이다. 다발 비행기는 OEI operation 특유의 V-speeds를 몇 가지 더 가지고 있다. 이러한 속도들은 “SE”라는 표기를 통해 단발 비행기와 구분된다. 몇몇 주요한 V-speed와 다발 비행기 특유의 V-speed는 다음과 같다.
⦁ VR– rotation speed – 비행기를 이륙 자세로 rotate 하기 위해 back pressure가 적용되는 속도.
⦁ VLOF– lift off speed – 비행기가 지면을 떠나는 속도. (Note: 일부 제조업체는 이륙 성능 정보의 기준으로 VR을 사용하고그 외의 제조업체는 VLOF를 사용한다)
⦁ VX– best angle of climb speed – 단위 거리 당 비행기가 가장 많은 고도를 얻을 수 있는 속도.
⦁ VXSE– OEI 상태에서의 best angle of climb speed.
⦁ VY– best rate of climb speed – 단위 시간 당 비행기가 가장 많은 고도를 얻을 수 있는 속도
⦁ VYSE – OEI 상태에서의 best rate of climb speed. 이 속도는 대부분의 속도계에 파란색 사선으로 표시되어 있다. single-engine absolute ceiling 너머에서는 VYSE가 최소 침하율을 제공한다.
⦁ VSSE– safe, intentional OEI speed – 초기에safe single engine speed라 불렸던 속도. 이는 임계 엔진(critical engine)을 의도적으로 작동하지 않게 만들 수 있는 최소 속도이다.
⦁ VREF– reference landing speed – 최종 접근에 사용되는 속도로이는 보통 VS0(착륙 외장에서의 실속 속도)의 1.3배이다. 조종사는 바람과 돌풍 조건에서 접근 속도를 조절하기 위해 VREF에 몇 노트를 더할 수 있다(예를 들어 VREF + 5).
⦁ VMC– 이 속도는 현재 14 CFR part 23, section 23.2135(c)에 다음과 같이 정의되어 있다:중대한 추력 상실 이후에도 비행기의 제어를 유지할 수 있는 calibrated airspeed. VMC는 보통 대부분의 속도계에 붉은색 사선으로 표시되어 있다. [그림 13-1] 과거에는 VMC가 다음과 같이 정의되어 있었다: 임계 엔진이 갑자기 작동하지 않는 상태에서 비행기의 제어를 유지할 수 있는, 그리고 이후 5도 이하의 bank angle로 감속 없이 직진 비행을 유지할 수 있는 calibrated airspeed. 이 규정에 따라 증명된 비행기에는 여전히 이러한 정의가 적용된다. 어떤 규정에서도 비행기가 이 속도에서 상승해야 한다는 조건은 없다. VMC는 오직 방향 제어만을 다룬다. VMC에 대한 자세한 내용은 이 장의 뒷부분에서 설명된다.
달리 명시되어있지 않는 한 AFM/POH에 주어진 V-speed는 해수면, 표준 대기 상태, 그리고 최대 이륙 중량에 적용된다. performance speed는 항공기 무게, 외장, 그리고 대기 조건에 의해 변화한다. 속도는 mph(statute miles per hour)나kt(knots)로 명시되며이 속도들은 CAS(calibrated airspeeds)나IAS(indicated airspeeds)로 주어진다. 보통 최신의 AFM/POH는 V-speed를 KIAS(knots indicated airspeed)로 나타낸다. 특정 규정 조건을 만족시키기 위해 몇몇V-speed는KCAS(knots calibrated airspeed)로 명시된다. 조종사는 가급적 비행기를 AFM/POH에 게재된 지시 속도로 운영해야 한다.
rate of climb은 단위 시간당 얻은 고도를 의미한다. 반면 climb gradient는 수평으로 100피트 이동할 때마다 얻는 고도에 대한 실제 측정값을 %로 나타낸 것이다. 100ft당 1.5ft의 고도를 얻었다면(혹은 1,000ft당 15ft나10,000ft당 150ft의 고도를 얻었다면)climb gradient는 1.5%이다.
엔진 고장이 발생하면 급격한 성능 손실이 발생한다(특히 막 이륙한 직후). 모든 비행기의 상승 성능은 수평 비행을 수행하는데 필요한 추력 마력을 제외한 나머지 추력 마력의 함수이다.다발 비행기의 각 엔진이 200 추력 마력을 생산하고 수평 비행에 필요한 추력 마력이 175라고 가정해본다. 이러한 상황에서 비행기가 상승에 사용할 수 있는 예비 추력 마력은 225이다.한쪽 엔진이 고장나면 상승에 사용할 수 있는 추력 마력이 25(200-175)만 남게 된다.
비행기의 성능 특성은 형식 증명 시 유효했던 규칙에 따라 달라진다. 현재 개정된 14 CFR part 23, 81 FR 96689는 2016년 12월 30일에 발효되었다. 여기에는 탑승객 좌석이 19개 이하이고 최대 인가 이륙 중량이 19,000파운드 이하인 normal category airplanes에 대한 형식 증명을 포함한다(section 23.2005(a)). 현재의 14 CFR part 23 certification rules(section 23.2005(b))는 최대 탑승객 좌석에 따라 비행기의 certification level을 1에서 4까지 구분한다. 예를 들어 level 2 airplane은 2 ~6명의 탑승객 좌석을 가지고 있다. 또한 이 규칙은 비행기를 속도에 따라 두 가지 performance levels로 나눈다(section 23.2005(c)). single-engine crashworthiness 조건을 만족하지 못하는 level 2 low speed airplane(VNO나VMO가 calibrated airspeed 250 knots 이하이고MMO가 0.6 이하인 performance level)이 형식 증명을 받기 위해선 중대한 추력 손실이 발생한 후 5,000ft의 기압 고도에서 순항 외장 상태로 최소 1.5%의 climb gradient를 만족해야 한다(section 23.2120(b)(1)).
현재의 part 23에 따라 증명된 다양한 비행기 하위 집합들은 14 CFR part 23, section 23.2120(b)에서 명시하는 특정 single-engine climb performance 기준을 충족하지만왕복 엔진 다발 비행기를 위한 과거의 14 CFR part 23 single-engine climb performance 조건은 다음과 같이 세분화된다:
⦁ 최대 무게 6,000파운드 초과 및/혹은 VS061kt 초과: 5,000ft MSL에서의 single-engine rate of climb(fpm)이0.027 VS02 이상이어야 한다. 1991년 2월 4일 이후에 형식 증명을 받은 비행기의 경우에는 상승 요건이 1.5%의 climb gradient로 표시된다. climb gradient와 0.027 VS02 공식은 정확히 일치하지 않는다. 형식 증명을 받은 날짜를 항공기의 모델 연식과 혼동해서는 안 된다. 많은 다발 비행기들의 형식 증명 기준이 CAR 3(Civil Aviation Regulations)으로 거슬러 올라간다.
⦁ 최대 무게 6,000파운드 이하 및VS061kt 이하: 단순히 5,000ft MSL에서의 single-engine rate of climb이 결정되기만 하면 된다.상승률이 음수가 될 수도 있다. 5,000ft나 그 외의 고도에서 single-engine이 양의 상승률을 발생시켜야 하는 조건은 없다. 1991년 2월 4일 이후에 형식 증명을 받은 light-twins의 경우에는 단순히 single-engine climb gradient가 결정되기만 하면 된다(climb gradient가 양수이든 음수이든 상관 없음).
여기서는 다발 비행기에 일반적으로 설치되는 시스템들이 다뤄진다. 다발 비행기는 complex single-engine airplanes와 많은 특징들을 공유한다. 그러나 두 개 이상의 엔진을 갖춘 항공기에서 더 자주 발생하는 고유한 특징들이 있다.
Feathering Propellers
다발 비행기의 프로펠러는 단발 비행기의 정속 프로펠러(constant-speed propeller)와 똑같아보일 수 있다. 허나 실제로는 그렇지 않다. 전형적인 다발 비행기에서 조종사는 작동하지 않는 엔진의 프로펠러를 feather 할 수 있다. 프로펠러를 feather 하면 프로펠러 블레이드가 비행기의 상대풍과 유선형으로 배치되어서 엔진 회전이 멈추므로 항력이 최소화될 수 있다. [그림 13-2] 이러한 기능을 통해 엔진 고장 이후 남은 엔진의 성능에 따라 적절한 공항으로 계속 비행할 수 있다.
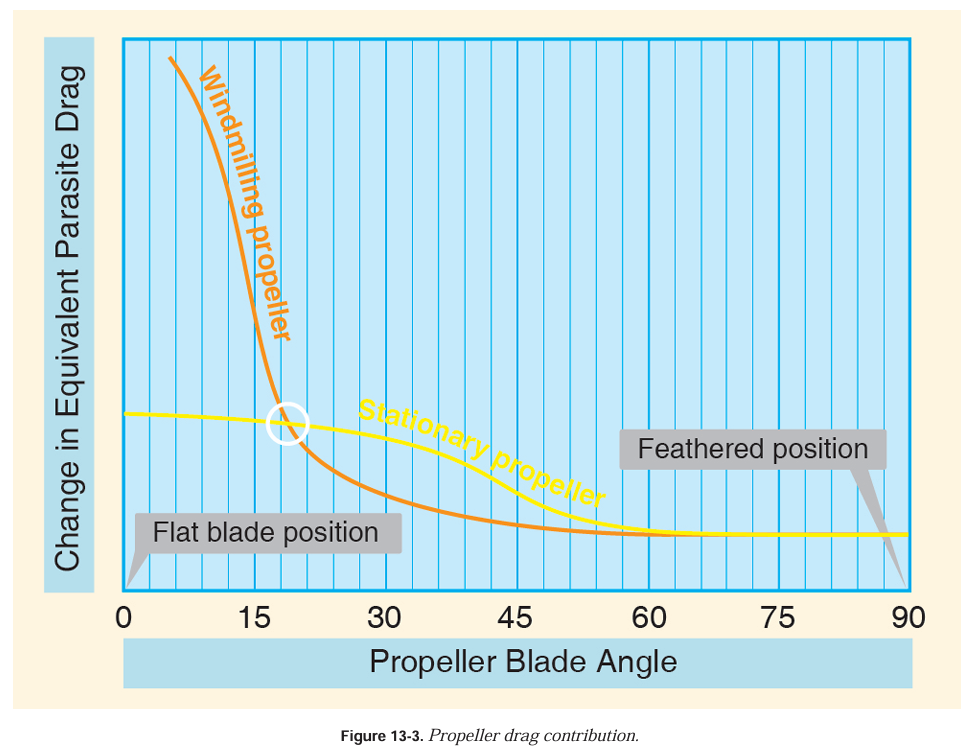
feathering은 프로펠러 블레이드의 각도에 따른 유해 항력 변화 때문에 중요하다. [그림 13-3] 프로펠러 블레이드의 각도가 feather 위치에 놓이면 프로펠러의 유해 항력이 최소가 된다. 하나의 feathered propeller에서 발생한 유해 항력은 비행기 전체 항력의 작은 부분을 차지한다.
flat pitch position 근처의 낮은 블레이드 각도에서는 프로펠러에 의해 더해지는 항력이 크다. 이러한 낮은 블레이드 각도에서 프로펠러가 높은 rpm으로 windmilling을 하면 상당한 항력이 발생해서 항공기가 제어가 힘들어지거나 불가능해질 수 있다. 이러한 프로펠러에서는 동체의 유해 항력만큼 큰 유해 항력이 만들어질 수 있다.
거의 모든 단발 비행기의 정속 프로펠러는 non-feathering, oil-pressure-to-increase-pitch 설계를 가지고 있다. 이러한 설계에서는 propellergovernor의 오일 압력이 증가할 때 블레이드 각도가 high pitch, low rpm으로 움직인다.
이와 반대로 거의 모든 다발 비행기의 정속 프로펠러는 full feathering, counterweighted, oil-pressure-to-decrease-pitch 설계를 가지고 있다. 이러한 설계에서는 propellergovernor의 오일 압력이 증가할 때 블레이드 각도가 low pitch, high rpm으로 움직인다(즉, feather blade angle로부터 멀어지도록 움직임). 이러한 프로펠러의 feathering을 막는 유일한 방법은 높은 압력의 엔진 오일을 지속적으로 공급하는 것이다. 오일 압력이 손실되거나 propeller governor가 고장났을 때 프로펠러 feathering을 가능하게 만들기 위해선 이러한 방법이 필수적이다.
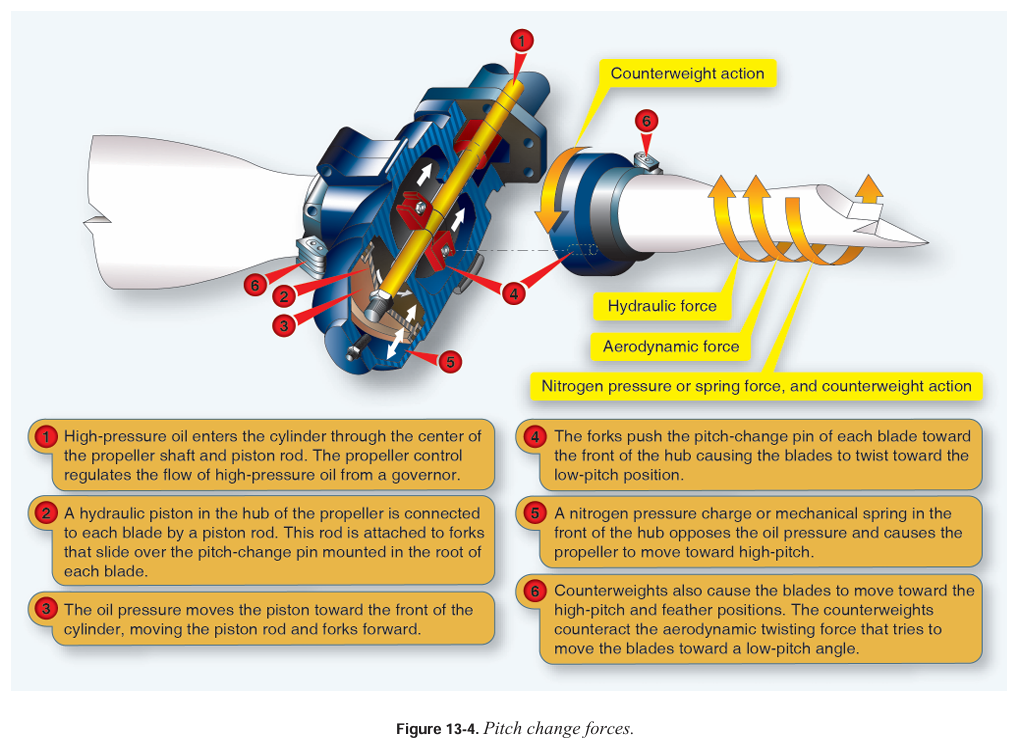
Windmilling propeller에 작용하는 공기역학적 힘은 프로펠러 블레이드를 low pitch, high rpm으로 구동하는 경향이 있다. 각 블레이드의 shank에 부착된 평형추(counterweights)는 블레이드를 high pitch, low rpm으로 구동는 경향이 있다. 평형추에 작용하는 원심력은 보통 공기역학적 힘보다 약간 더 크다. 따라서 propeller governor에 의해 작용하는 힘이 없다면 원심력이 프로펠러 블레이드를 high pitch, low rpm으로 구동할 것이다. propeller governor의 엔진 오일에서 발생하는 힘은 프로펠러 블레이드의 각도를 low pitch, high rpm으로 구동한다. 따라서 오일 압력이 줄어들면 평형추가 블레이드의 각도를 높게 만들고 엔진 rpm을 줄어들게 만든다. [그림 13-4]
feathering을 수행하기 위해선 propeller control을 완전히 뒤로 빼야 한다. 모든 오일 압력이 governor로부터 빠지면 평형추가 프로펠러 블레이드를 feather position으로 구동한다. rpm이 줄어들수록평형추에 작용하는 원심력이 줄어들기 때문에 블레이드를 완전히 feather하기 위해선 추가적인 힘이 필요하다. 이 추가적인 힘은 propeller dome에 저장된 고압의 공기나 스프링으로부터 발생하며 이는 블레이드를 feathered position으로 구동한다. feathering을 위한 전체 과정에 최대 10초가 소요될 수 있다.
propeller feathering은 블레이드의 각도를 변화시키고 엔진 회전을 멈추는 역할을 한다. 즉, 엔진을 완전히 보호하기 위해선 fuel(mixture, electric boost pump, fuel selector), ignition, alternator/generator를 끄고 cowl flaps를 닫아야 한다. 만약 해당 항공기가 여압 항공기라면 고장 난 엔진의 air bleed를 닫아야 한다. 일부 항공기는 firewall shutoff valves를 갖추고 있으며 이는 이러한 시스템들 중 몇몇을 보호한다.
고장의 유형,고도, 그리고 여유 시간에 따라고장 난 엔진을 완전히 보호하려는 절차가 필요하지 않을 수도 있으며 심지어 바람직하지 않을 수도 있다. 고장 난 엔진쪽 fuel controls, ignition, alternator/generator switchs의 position은 항공기 성능에 영향을 미치치 않으며 급한 상황에서는 조종사가 잘못된 스위치를 조작할 수도 있다.
propeller unfeather를 위해선 엔진이 회전해야 한다. 그래야 프로펠러 블레이드를 feathered position으로부터 움직이기 위한 오일 압력이 발생할 수 있다. 먼저 throttlelow idle 및mixture rich 상태로 ignition을 켠다. propeller control이 high rpm position에 있으면 stater가 체결된다. 엔진이 windmill을 시작하여 오일 압력에 의해 블레이드가 feathered position으로부터 움직이면 시동이 걸린다. 시동이 걸린 후 예열을 위해 프로펠러 rpm을 즉시 줄여야하며조종사는 cylinder head temperature와 oil temperature를 확인해야 한다.
unfeathering accumulator는 비행 중 electric starter 없이도 feathered engine을 시동해주는 장치이다. accumulator는 예비 압력을 저장하는 장치이다. 다발 비행기에서 unfeathering accumulator는 압축 공기나 질소에 의해 가압된 소량의 예비 엔진 오일을 저장한다. 비행 중 feathered engine을 시동하기 위해 propeller control을 feather position으로부터 움직이면accumulator의 압력 방출된다. 오일은 압력에 의해 propeller hub로 흘러서 블레이드를 high rpm, low pitch로 구동하며이로 인해 프로펠러가 windmill을 시작한다. 만약 fuel과 ignition이 있다면 엔진 시동이 걸린다. propeller governor의 높은 오일 압력은 엔진 시동 후 accumulator를 재충전하여 차후의 unfeathering에 대비한다. 훈련용 비행기의 경우 unfeathering accumulator가electric starter와 battery의 수명을 늘려줄 수 있다. 만약 accumulator가 프로펠러를 feathered position으로부터 움직이지 못했다면 electric starter를 사용할 수 있다.
정확한 unfeathering 절차를 위해 항상 AFM/POH을 따라야 한다. 지상에서 feathering을 수행하거나 feathered engine을 시동하면 과도한 응력과 진동이 발생하므로 제조업체에 의해 권장되지 않는다.
propeller governor의 오일 압력이 손실되면 counterweights, spring, 및/혹은 dome charge가 프로펠러를 feathered position으로 구동한다. 즉, 엔진이 꺼져서 오일 압력이 0으로 떨어지면 언제든 프로펠러 블레이드가 feather 되어야 한다. 허나 약 800rpm 이하에서는 원심력이 감소하면서 propeller hub의 pitch changing mechanism에 있는 anti-feathering lock pins가 제자리로 이동해서 feathering이 방지될 수 있다. 따라서 프로펠러를 feather 하려면 엔진 rpm이 약 800 이하로 떨어지기 전에 이루어져야 한다. 실제로 엔진이 꺼질 때마다 프로펠러 블레이드가 feather 되는 항공기가 존재한다. 이러한 프로펠러의 경우 독특한 엔진 설계로 인해 centrifugally-operated pins를 장착하지 않는다.
Propeller Synchronization
대부분의 다발 비행기들은 propeller synchronizer(prop sync)를 가진다. 이는 프로펠러들의 rpm 차이로 인해 발생하는 성가신 “drumming(둥둥거리는 소리)”이나“beat(울림)”를 없애기 위함이다. prop sync를 사용하기 위해선 조종사가 프로펠러들의 rpm을 대략적으로 맞춰야 한다. prop sync는 “slave” engine의 rpm을 “master” engine의 rpm과 정확하게 일치하도록 조정하고 그 관계를 유지한다.
새로운 프로펠러 rpm을 선택할 때는 prop sync를 해제해야 하며새로운 rpm이 설정된 후에 시스템을 다시 활성화한다. 이륙, 착륙, 그리고 single-engine operation 도중에는 prop sync가 항상 꺼져있어야 한다. 시스템 세부사항과 제한 사항을을 위해 AFM/POH를 참조한다.
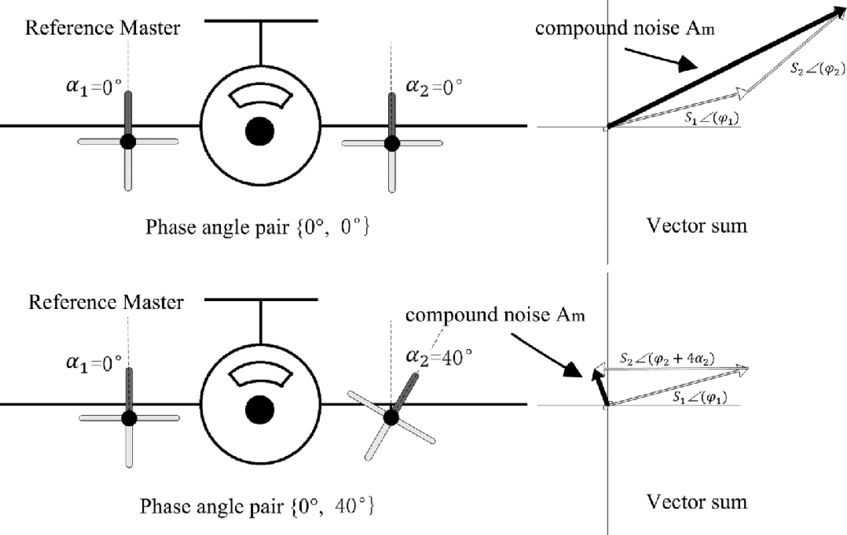
propeller synchrophaser는 propeller synchronizer를 변경시킨 것이다. prop synchrophase는 rpm을 정확하게 일치하는데 있어 synchronizer와 매우 비슷하게 작동한다. 허나 syncrophaser는rpm을 일치시킬 뿐만 아니라 각 프로펠러 블레이드들의 위치를 비교 및 조정한다. propeller synchrophaser를 통해 상당한 프로펠러 소음과 진동이 감소할 수 있다. 조종사의 관점에서는 propeller synchronizer와 propeller synchrophaser의 작동 방법이 매우 비슷하다. synchrophaser도 보통 prop sync라 불리지만이는 기술적인 관점에서 볼 때 정확하지 않다.
조종사가 직접 프로펠러들의 rpm을 맞추는데 도움을 주기 위해 일부 다발 비행기에는 프로펠러 모양의 작은 계기가 설치된다. 조종사가 직접 엔진 rpm을 미세 조정해서 계기의 회전이 멈추면 프로펠러들이 동일하게 맞춰진다. 이는 프로펠러 beat 소리를 통해 엔진 rpm을 동일하게 맞출 때 유용한 예비 수단이다. 이 계기는 대부분의 propeller synchronizer/synchrophase 시스템과 함께 설치된다. 몇몇 synchrophase 시스템들은 조종사가 phase angle을 제어할 수 있도록 knob를 갖추고 있다.
(출처: X-plane)(출처: ResearchGate)
Fuel Crossfeed
Fuel crossfeed도 다발 비행기의 고유 시스템이다. crossfeed를 사용하면 엔진이 반대쪽 날개에 위치한 연료 탱크로부터 연료를 끌어올 수 있다.
대부분의 다발 비행기에서 crossfeed는 OEI 상황에서의 항속시간과 항속거리를 늘리기 위한 비상 절차이다. 정상 운영 도중 연료 균형을 맞추기 위해 crossfeed를 사용하는 모델들도 있지만 이는 흔치 않다. crossfeed의 제한 사항과 절차는 다발 비행기마다 다르며 이는 AFM/POH에 나타나 있다.
지상에서 fuel selectors의 position을 빠르게 바꾸어서 crossfeed를 점검하는 것은 의미가 없다. crossfeed를 점검하기 위해선 crossfeed 시스템의 완전한 기능 점검이 이루어져야 한다. 이를 위해선 run-up 도중 엔진들이 각각의 crossfeed position에서 작동해야 한다. 각 엔진을 별도로 점검해야 하며 crossfeed source로부터 연료 흐름이 설정될 수 있도록 최소 1분간 적당한 출력(최소 1500rpm)을 사용한다. 점검이 끝나면 각 엔진을 main(takeoff) fuel tanks로부터 최소 1분간 적당한 출력으로 작동하여 연료 흐름을 다시 확인한다.
이러한 점검 방법이 매 비행 전마다 필요하지는 않다. crossfeed lines는 수분과 잔해가 축적되기 이상적인 장소이다(단, crossfeed가 가끔 사용되며 비행 전에external drains를 통해drain이 되는 경우 제외). OEI 상황이지만 교체비행장이 가까이 있다면 보통 crossfeed가 사용되지 않는다. 조종사는 양쪽 엔진이 모두 작동하는 상태에서 정상 이륙/착륙 도중 crossfeed를 사용해서는 안 된다. OEI가 발생하였으며 만약 crossfeed를 사용하지 않으면 남은 엔진도 멈출 수 있는 상황이라면 crossfeed가 필요할 수 있다.
Combustion Heater
다발 비행기에서 흔히 볼 수 있는 또 다른 장치로 combustion heaters가 있다. combustion heater는 휘발유를 연소시켜서 가열 공기를 생성하는 작은 용광로라 설명될 수 있다. 이러한 가열 공기는 앞유리의 성에를 제거하고 승객에게 편안함을 제공한다. 대부분의 combustion heater는 자동 온도 조절 장치로 작동하며 유지보수를 위해 작동시간을 기록하는 별도의 시간 측정기를 가진다. 장치에 설치된 thermal switch 덕분에 자동으로 과열이 보호된다. 때문에 스위치를 리셋하기 위해선 장치에 열 손상이 발생했는지 확인해야 한다.
보통 제조업체는 combustion heater를 끌 때 냉각 기간을 가지도록 권장한다. 대부분의 heater 설명서는 비행 중 최소 15초 동안 외부 공기가 장치를 순환하도록, 혹은 지상에서 최소 2분 동안 ventilation fan을 작동하도록 권장한다. 적절한 냉각 기간이 없으면 보통 thermal switch가 작동하며 스위치가 리셋되기 전까지 heater가 작동하지 않는다.
Flight Director/Autopilot
다발 비행기는 보통 Flight director/autopilot(FD/AP) 시스템을 갖추고 있다. 이 시스템은 pitch, roll, heading, altitude, radio navigation signals를 컴퓨터에 통합한다. computed commands라 불리는 그 결과값은 FCI(flight command indicator)에 표시된다. FCI는 기존의 자세계를 대체한다. FCI는 FDI(flight director indicator)나ADI(attitude director indicator)라고도 불린다.
일부 제조업체는 flight director/autopilot system을 IFCS(integrated flight control system)라 부른다. 그 외 제조업체에서는 AFCS(automatic flight control system)라는 용어를 사용할 수 있다.
FD/AP 시스템은 다음 단계로 사용될 수 있다:
• Off(raw data)
• Flight director(computed commands)
• Autopilot
시스템이 Off 되어 있으면FCI가 일반적인 자세계처럼 작동한다. 대부분의 FCI에서 FD가 꺼지면 command bars가 사라진다. 조종사는 시스템이 설치되어있지 않은 것처럼 항공기를 조종한다.
FD를 통해 항공기를 조종하려면 조종사가 원하는 작동 방법(heading, altitude, navigation (NAV) intercept and tracking)을 FD/AP mode controller에설정해야 한다. 원하는 작동 방법이 설정되면computed flight commands가 single-cue system이나dual-cue system을 통해 FCI에 표시된다. single-cue system에서는 commands가 “V” bars를 통해 나타난다. dual-cue system에서는 commands가 두 개의 command bars를 통해 나타나는데 하나는 pitch를 위한 것이고 남은하나는 roll을 위한 것이다. computed commands를 통해 항공기를 조종하기 위해 조종사는 FCI의 symbolic airplane이 steering cues에 맞춰지도록 비행한다.
(출처: IFH)
autopilot을 활성화하기 위해선 보통 FD가 반드시 작동해야 한다. FD를 켠 후 조종사는 언제든 mode controller를 통해 autopilot을 활성화할 수 있다. 그러면 autopilot은 FD의 computed commands에 맞춰서 항공기를 조종한다.
다른 컴퓨터와 마찬가지로 FD/AP 시스템은 지시받은 것만을 수행한다. 조종사는 FD/AP시스템이 특정 구간에 대해 올바르게 설정되어 있는지 반드시 확인해야 한다. armed modes 및/혹은engaged modes는 보통 mode controller나 별도의 annunciator lights에 표시된다. 특정 순간 FD를 사용하지 않고 항공기를 직접 조종한다면 FD를 꺼서 command bars가 사라지도록 해야 한다.
시스템을 활성화하기 전에 모든 FD/AP 컴퓨터와 trim이 점검되어야 한다. 최신 시스템들은 점검이 수행되지 않으면 활성화가 이루어지지 않는다. 조종사는 이를 해제하는 방법들도 숙지해야 한다. 시스템 세부사항들은 AFM/POH의 supplements section에서 확인할 수 있다. 또한 항전 제조업체들이 유용한 조종사 운영 가이드를 제공할 수도 있다.
Yaw Damper
yaw damper는 자이로스코프(이는 yaw rate를 감지함)나 가속도계(이는 lateral Gs를 감지함)의 입력에 따라 rudder를 움직이는 서보 기구이다. yaw damper는 난기류에 의한 수직 축 움직임을 최소화한다. (후퇴익 비행기에서는 yaw damper가dutch roll 특성을 감쇠시키는 기능도 제공한다.) yaw damper가 작동하면탑승자는 부드러운 승차감을 느낀다(특히 항공기의 뒤편에 앉은 경우). 이륙과 착륙 도중에는 yaw damper가 꺼져있어야 한다. OEI 상태에서 yaw damper를 사용하기 위해선 추가 제한 사항이 있을 수 있다. 대부분의 yaw dampers는 autopilot과 별도로 작동할 수 있다.
Alternator/Generator
다발 항공기의 각 엔진에는 alternator나 generator가 설치되어 있다. alternator나 generator의 병렬 회로는 각 alternator/generator의 전원을 일치시키며 이는 모든 alternator/generator로부터 전기 부하가 균등하게 분배되록 만든다. alternator/generator 고장이 발생할 경우 작동하지 않는 alternator/generator를 분리한 다음 남은 alternator/generator로부터 전체 전기 시스템에 전원을 공급할 수 있다. 하나의 alternator/generator로 작동할 때에는 alternator/generator의 전기 용량에 따라 전기적 부하를 줄여야 할 수 있다(이를 load shedding이라 부름). AFM/POH에 시스템 세부 사항과 제한 사항이 포함된다.
Nose Baggage Compartment
다발 비행기에서는 nose baggage compartments가 일반적이다. nose baggage compartment에도 적재 제한 준수에 관한 일반적인 지침이 적용된다.조종사들은 가끔 nose baggage compartment의 걸쇠를 제대로 잠그지 않는다. 문이 제대로 잠기지 않으면 보통 이륙 후에 문이 열리고 내부의 물건들이 밖으로 나와서 프로펠러에 부딪힐 수 있다. nose baggage compartment가 비어있음에도 불구하고 조종사가 열린 문에 사로잡혀서 사고가 발생한 경우도 있었다. nose baggage compartment의 걸쇠가 잘 잠겨있는지 확인하는 것은 필수적인 비행 전 점검 항목이다.
대부분의 항공기들은 nose baggage door가 열린 상태로 계속 비행할 수 있다. 공기 흐름의 교란으로 인해 약간의 buffet이 발생할 수 있으며 소음이 증가할 수 있다. 열린 문에 사로잡혀서 비행기를 조종하지 못하는 일이 있어서는 안 된다.
compartment 내부를 점검하는 것도 중요한 비행 전 점검 항목이다. baggage compartment에 들어가는 tow bars, engine inlet covers, windshield sun screens, oil containers, 고임목, 그리고 기타 소형 수공구가 비행 도중 움직이지 않도록 고정되어야 한다.
Anti-Icing/Deicing
다발 비행기에는 Anti-icing/deicing장비가 자주 설치되며 다양한 시스템들의 조합으로 구성될 수 있다. Anti-icing/deicing장비는 기능에 따라 anti-icing이나deicing으로 구분될 수 있다. anti-icing/deicing 장비가 존재한다 하여 착빙 조건에서 비행하는 것이 반드시 인가되는 것은 아니다. 승인 사항과 제한 사항을 확인하기 위해 AFM/POH, 플래카드, 그리고 제조업체를 참조해야 한다. anti-icing 장비는 특정 protected surface에 얼음이 형성되는 것을 방지한다. anti-icing 장비의 예로는 heated pitot tubes, heated or non-icing static ports and fuel vents, propeller blades with electrothermal boots or alcohol slingers, windshields with alcohol spray or electrical resistance heating, windshield defoggers, 그리고 heated stall warning lift detectors가 있다. 터보프롭 엔진의 경우 보통 air intake를 둘러싼 “lip”이 전기나bleed air로 가열된다. AFM/POH가 달리 명시하지 않는 한 known icing condition이나 suspected icing condition으로 진입하기 전에 anti-icing 장비를 작동시켜야 한다.
(출처: FAA AIM)
Deicing 장비는 보통 날개와 꼬리의 앞전에 있는 pneumatic boots로 제한된다. deicing 장비는 protected surface에 이미 형성된 얼음을 제거하기 위해 설치된다. 조종사가 pneumatic boots를 작동하면 boots가 pneumatic pumps의 공기에 의해 팽창해서 얼음이 제거된다. pneumatic boots는 몇 초 동안 팽창한 후에 다시 원래의 위치로 수축된다. 조종사는 축적된 얼음을 확인한 다음 AFM/POH에 따라 주기적으로 boots를 작동한다. 야간에는 왼쪽 engine nacelle의 ice light를 통해 날개에 축적된 얼음을 확인할 수 있다.
(출처: Reddit)(출처: aero-news)
착빙 조건에서의 비행에 필요한 다른 장비로는 alternate induction air source와 alternate static system source가 있다. Ice tolerant antennas도 설치된다.
impact ice가 normal induction air source에 축적되면 carburetor heat(carbureted engines)이나 alternate air(fuel injected engines)를 사용해야 한다. normal induction air source에 얼음이 축적되었다는 사실은 엔진 rpm의 감소를 통해(fixed-pitch propellers의 경우), 그리고manifold 압력의 감소를 통해(constant-speed propellers의 경우)알아낼 수 있다. 일부 fuel-injected engines에서는 normal air source가 막혔을 때 자동으로 alternate air source가 작동한다.
primarystatic source가 막히는 상황이 발생하면 alternate static system이 정압을 제공한다. 대부분의 비여압 항공기에서는alternate static sources가 객실과 연결된다. 여압 항공기에서는 보통 alternate static sources가 수화물 칸(수화물 칸은 여압이 이루어지지 않음)과 연결된다. 조종사는 조종실의 밸브를 열어서 alternate static source를 활성화시킬 수 있다. alternate static source가 활성화되면 속도계, 고도계, 혹은 수직 속도계에 오차가 발생할 수 있다. 이를 수정하는 표가 보통 AFM/POH에서 제공된다.
Anti-icing/deicing 장비는 오직 protected surfaces의 얼음만 제거한다. anti-ice/deice 시스템을 적절히 사용하여도 unprotected areas에 얼음이 상당히 축적될 수 있다. 높은 받음각으로 비행하거나혹은 심지어 정상 상승 속도로 비행할 때 날개 하부 표면(unprotected area)에 상당한 얼음이 축적될 수 있다.AFM/POH는 보통 착빙 조건에서 유지되어야 할 최소 속도를 명시한다. 얼음 축적으로 인해 모든 비행 특성이 저하되고 성능이 크게 손실될 수 있다. 얼음이 축적되었을 때 조종사는 실속 경고를 위해 stall warning devices를 의존해서는 안 된다.
얼음은 비행기에 불균형하게 축적된다. 얼음은 무게와 항력을 증가시키고 추력과 양력을 감소시킨다. 심지어 날개 모양도 얼음 축적에 영향을 미친다(얇은 에어포일은 두꺼운 에어포일보다 얼음이 축적되기 쉬움). 이러한 이유로 특정 표면들(예를 들어 수평 안정판)은 날개보다 얼음이 생기기 쉽다. 얼음이 축적된 상태에서 착륙 접근을 수행하는 경우에는 최소한의 flap을 사용해야 하며(flap이 연장되면 수평 안정판의 받음각이 증가하기 때문) 추가적인 속도 여유도 있어야 한다. 갑작스러운 외장 변화와 속도 변화는 피해야 한다.
AFM/POH에서 달리 권장하지 않는 한 착빙 조건에서 autopilot을 사용해서는 안 된다. autopilot을 계속 사용하면 얼음 축적으로 인해 발생하는 trim 변화와 조작 변화를 알 수 없게 된다. 이러한 피드백이 없다면 조종사는 얼음이 위험한 수준까지 축적되어도 이를 인지하지 못할 수 있다. autopilot이 설계 한계에 도달한 후 갑자기 해제될 수 있으며 이때 조종사는 비행기의 조작 특성이 적절하지 않은 것을 확인할 수 있다.
착빙 조건에서의 비행에 대한 AFM/POH의 승인이 없는 비행기에 anti-ice/deice 장비가 설치되어 있다면 이는 의도치 않게 착빙 조건을 마주하였을 때 탈출을 용이하게 만들기 위한 것이다. AFM/POH의 승인이 있다 해도 최대한 착빙 조건을 회피하는 것이, 그리고 착빙 조건에서의 장시간 비행을 피하는 것이 좋다. severe icing 조건에서 비행하도록 승인된 다발 비행기는 없으며 착빙 조건에서 무한정 비행하도록 설계된 다발 비행기도 없다.
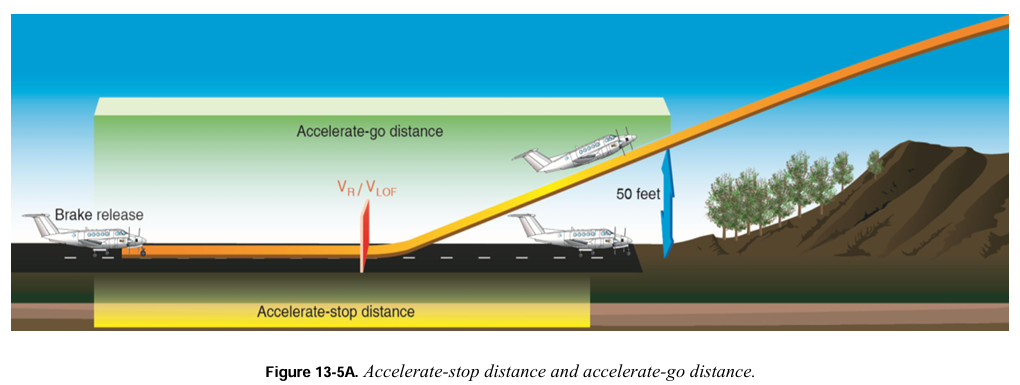
• Accelerate-stop distance란 제조업체가 명시한 특정 속도(VR이나VLOF)에서 엔진 고장이 발생하였을 때 비행기를 완전히 정지시키는데 필요한 활주로 길이이다. [그림 13-5A]
• Accelerate-go distance란 제조업체가 명시한 특정 속도(VR이VLOF)에서 엔진 고장이 발생하였을 때 50ft까지 이륙 및 상승하는데 필요한 수평 거리이다. [그림 13-5A]
• Climb gradient란 수평 거리 100ft 당 얻는 고도를 백분율로 표시하는 것이다. 1.5%의 climb gradient는 100ft의 수평 거리 당 1.5ft의 고도를 얻는 것이다. 또한 climb gradient는 NM 당 얻는 고도로, 혹은 수평 거리와 수직 거리의 비율로 (예를 들어 10:1) 표현될 수 있다. [그림 13-5B] climb gradient는 rate of climb와 달리 바람의 영향을 받는다. climb gradient는 정풍 성분에 비례하고 배풍 성분에 반비례한다.
• 양쪽 엔진이 작동하는 상태에서 비행기가 100fpm의 안정적인 상승률을 유지할 수 있는 가장 높은 고도를 all-engine service ceiling이라 부른다. 더 이상 상승이 불가능하면 비행기는 absolute ceiling에 도달한 것이다.
• OEI 상태에서 비행기가 더 이상 50fpm의 상승률을 유지할 수 없는 고도를 single-engine service ceiling이라 부른다. 더 이상 상승이 불가능하면 비행기는 single-engine absolute ceiling에 도달한 것이다.
다발 비행기로 이륙을 계획할 때에는 엔진 고장 발생 시 적절한 조치가 취해질 수 있도록 상세하게 이루어져야 한다. 비행 전 계획 도중 정보에 입각한 이륙 결정을 내리기 위해선 조종사가 항공기의 성능과 제한 사항에 대해 잘 알고 있어야 한다. 이 결정은 “before takeoff” checklist의 최종 항목으로서 재검토 되어야 한다.
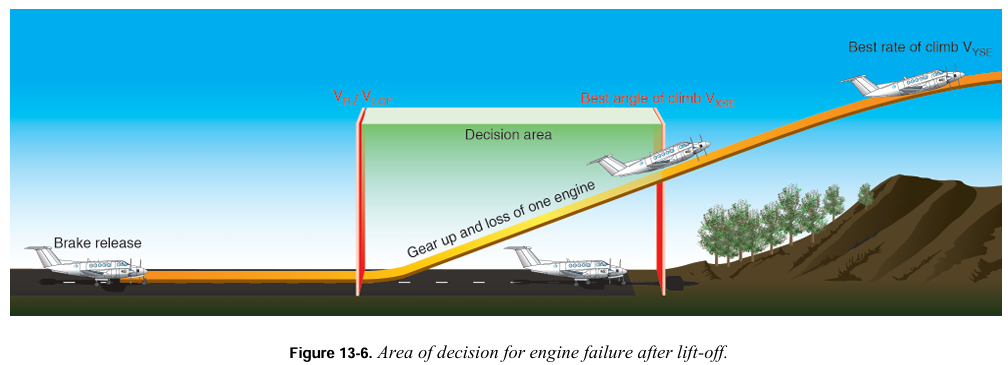
이륙 직후에 엔진 고장이 발생하면 비행을 계속하거나 혹은 설령 공항이 아니더라도 착륙해야 한다. 만약 single-engine 상승 성능이 비행을 계속하기에 적절하며 외장이 지체 없이 정확하게 만들어졌다면 이륙 후에 상승이 계속될 수 있다. single-engine 상승 성능이 충분하지 않다면 가장 적절한 곳에 착륙을 해야 한다. 항공기 성능이 상승을 수행하기에 부족함에도 불구하고 계속하여 비행하려 시도해서는 안 된다. [그림 13-6]
이륙 계획에 포함되는 요소들에는 weight and balance, 비행기 성능(single engine 성능과 multiengine 성능 둘 다), 활주로 길이 · 경사 · contamination, 그 지역의 지형 및 장애물, 기상 조건, 그리고 조종사의 실력이 있다. 대부분의 다발 비행기는 AFM/POH performance charts를 가지고 있으며조종사는 그 사용 방법에 능숙해져야 한다. 이륙 전에 다발 비행기의 조종사는 weight and balance 제한 사항들이 준수되는지, 활주로 길이는 적절한지, 정상 비행경로가 장애물과 지형으로부터 개방되어 있는지 확인해야 한다. 또한 조종사는 이륙 도중 엔진 고장이 발생하였을 때 취해야 할 적절한 조치를 고려해야 한다.
활주로 길이가 accelerate-stop distance 이상이어야 한다고 특별히 요구하는 규정은 없다. 대부분의 AFM/POH는 accelerate-stop distances를 단지 조언 정보로 게재한다. 이것이 AFM/POH의 limitations section에 게재된 경우에만 제한 사항이 된다. 허나 숙련된 다발 조종사는 정상 이륙에 필요한 최소 활주로 길이보다 긴 활주로의 안전 마진을 인지하며 안전과 올바른 관행의 일환으로 accelerate-stop distance보다 긴 활주로 길이를 고집한다.
accelerate-go distance는 이상적인 상황에서 비행기를 이륙 표고로부터 고작 50ft 지점까지 상승시킨다는 것을 고려해야 한다. 이러한 미미한 상승이라도 만들어내기 위해선 조종사가 예상치 못한 엔진 고장을 즉시 인지 및 반응해야 하고, landing gear를 올리고, 올바른 엔진을 식별 및 feather하고, 이 동안 속도를 VYSE로 조절하면서 정교한 속도 제어와 bank angle을 유지해야 한다. 지금까지 완벽하게 비행을 하였으며 장애물이 없고 평평하다 가정했을 때 비행기는 지형으로부터 날개폭보다 조금 더 높은 지점에 도착했다.
예를 들어 VYSE90노트에서 150fpm에 가까운 상승률이 발생하고 있을 때 500ft AGL에 도달하기 위해선 대략 3분간 450ft를 더 상승해야 한다. 이렇게 되면 비행기는 1.6%의 climb gradient를 통해accelerate-go distance 너머로5NM를 이동한다. 어떠한 선회를 수행하던(예를 들어 공항으로 돌아가려는 선회) 이는 이미 한계에 달한 비행기의 상승 성능을 심하게 저하시킨다.
모든 다발 비행기의 AFM/POH가 accelerate-go distance를 게재하는 것은 아니며 climb gradients를 게재하는 비행기는 더 적다. 이러한 정보가 게재되었다면 그 수치는 이상적인 비행 테스트 조건에서 결정된 것이다. 실제 비행 조건에서 이러한 성능이 발생할 가능성은 거의 없다.
이전 설명의 요점은 이륙 후 엔진 고장이 발생한 다발 비행기의 미미한 상승 성능을 설명한기 위한 것이다. 다발 조종사는 이륙 및 상승 구간 내에 결심 지점을 미리 선정해두어야 한다. 만약 이 지점 이전에 엔진 고장이 발생하였다면 설령 공중에 떴다 하더라도 활주로나 전방의 지표면에 착륙하기 위해 이륙을 중단해야 한다. 만약 이 지점 이후에 엔진 고장이 발생하였다면 조종사는 즉시 적절한 엔진 고장 절차를 수행하고 성능이 충분하다는 가정하에 상승을 계속해야 한다. 일반적 권장사항으로 만약 landing gear를 아직 올리지 않았다면 설령 공중에 떴다 하더라도 이륙을 중단해야 한다.
AFM/POH에 게재된 single-engine rate-of-climb 성능이 최소 100 ~ 200fpm이 아닌 한 이륙을 계속하는 선택지는 아마 존재하지 않을 것이다. 열적 난기류, 돌풍, 엔진과 프로펠러의 마모, 혹은 airspeed · bank· rudder의 미숙한 조작은 심지어 200fpm의 상승률조차 쉽게 상쇄할 수 있다.
이륙 전에 수행하는 안전 브리핑은 모든 승무원에게 미리 계획해둔 모든 비상조치를 명확하게 알려준다. 항공기를 단독으로 운항하는 경우에도 이륙 비상시의 고려사항을 검토하고 숙지해야 한다. 비상상황이 발생한 순간 망설임을 보이면 반응 시간과 적절한 대응을 할 능력이 저하된다.
weight and balance 개념은 single-engine airplane과 다르지 않다. 허나 새로운 하중 영역들(예를 들어 nose and aft baggage compartments, nacelle lockers, main fuel tanks, auxiliary fuel tanks, 그리고 nacelle fuel tanks)로 인해 좀 더 복잡하다. 조종사는 매 비행 전에 weight and balance를 해결해야 할 책임을 가지고 있다.
때때로 조종사는 제조업체의 weight and balance 서류에서 나타나는 용어들(empty weight, licensed empty weight, standard empty weight, basic empty weight)을 혼란스러워한다.
1975년에 GAMA(General Aviation Manufacturers Association)는 AFM/POH에 대한 표준화된 형식을 채택하였다. 이는 1976년부터 대부분의 제조업체에서 시행되었다. GAMA standards를 따르는 제조업체의 비행기들은 weight and balance에 대해 다음과 같은 용어들을 사용한다:
standard empty weight + optional equipment = basic empty weight
standard empty weight는 standard airplane, full hydraulic fluid, unusable fuel, full oil의 무게이다. optional equipment는 standard 이후에 설치된 모든 장비들의 무게이다. basic empty weight는 standard empty weight에서 optional equipment를 더한 것이다. basic empty weight는 usable fuel을 포함하지 않는다. 허나 full oil은 포함한다.
※ 다음은 대한항공 WEIGHT AND BALANCE 교재를 발췌한 내용이다.
1. MANUFACTURE’S EMPTY WT (MEW)
이는 가장 기본적인 항공기 중량이다. 즉, 항공기 Structure, 엔진, 그리고 항공기가 운항하는 데 필수적인 각종 장비를 포함하는 1차 중량이다.
2. BASIC EMPTY WT (BEW)
1) Definition
Manufacture'S Empty Wt (Mew)에는 포함되지 않지만, 항공기를 직접 운용하는 회사에서 운항에 필요한 설비 및 장비를 추가 장착하거나 장탈한 장비를 조정한 중량이다. 이는 매 3년마다 정기적으로 측정(Weighing)한 중량이다.
2) Bew에 포함되는 Item · Uncountable Fuel - 연료를 모두 사용하여 계기상에는 연료의 양이 Zero가 되더라도 실제 기체 내에 남아 있는 연료(Engine Oil, Constant Speed Drive System Oil) · Toilet Fluid And Chemical Charge · Life Raft, Life Vest 등 Emergency Equipment · 객실 Service를 위한 Galley Structure 및 Bar Unit · Fly Away Kit Bin · 보안 도어
(Fly Away Kit Bin. 출처: vrr.aero)
GAMA format 이전에 제작된 비행기들은 weight and balance를 위해 보통 다음 용어들을 사용하였다(단, 정확한 용어는 다소 다를 수 있음):
empty weight + unusable fuel = standard empty weight
standard empty weight + optional equipment = licensed empty weight
empty weight는 standard airplane, full hydraulic fluid, undrainable oil의 무게이다. unusable fuel은 엔진에 이용되지 않고 항공기에 남아있는 연료이다. standard empty weight는 empty weight에 unusable fuel을 더한 것이다. licensed empty weight는 standard empty weight에 optional equipment를 더한 것이다. 따라서 licensed empty weight는 standard airplane, optional equipment, full hydraulic fluid, unusable fuel, 그리고 undrainable oil을 포함한다.
basic empty weight는 full oil을 포함하지만 licensed empty weight는 그렇지 않다. 따라서 licensed empty weight를 활용하는 모든 weight and balance에는 항상 oil이 더해져야 한다.
항공기가 취항하면 정비사는 설치 장비의 변경 사항을 반영하기 위하여 amended weight and balance 서류를 작성한다. 오래된 weight and balance 서류들은 “superseded”라 표시되며 AFM/POH에 보관된다. 정비사가 GAMA terminology를 사용해야 할 의무가 있지는 않으므로 원본 이후의 weight and balance 서류에 다양한 용어가 사용될 수 있다. 조종사는 weight and balance 계산에 oil을 추가해야 하는지, 혹은 oil이 이미 포함되어 있는지를 결정하는데 있어 주의해야 한다.
multiengine airplane을 통해 대부분의 조종사들이 처음으로 “zero fuel weight”라는 단어를 접하게 된다. 모든 multiengine airplanes의 AFM/POH에 zero fuel weight limitation이 게재되는 것은 아니지만 대부분의 비행기가 그러하다. zero fuel weight이란 usable fuel이 탑재되어있지 않은 상태에서 허용하는 최대 airplane 및 payload 무게를 의미한다. zero fuel weight limitation이 게재된 경우 해당 수치를 초과하는 무게는 반드시 usable fuel로 구성되어야 한다. zero fuel weight은 fuselage loads가 wing spars에 가하는 하중을 제한하기 위해 설정된다.
multiengine airplane이 다음의 무게와 허용치를 가진다고 가정하자:
Basic empty weight 3,200 lbs
Zero fuel weight 4,400 lbs
Maximum takeoff weight 5,200 lbs
Maximum usable fuel 180 gal
1. useful load 계산:
Maximum takeoff weight 5,200 lbs
Basic empty weight -3,200 lbs
Useful load 2,000 lbs
useful load는 항공기가 운송할 수 있는 usable fuel, 승객, 수하물, 그리고 화물의 최대 조합이다.
2. payload 계산:
Zero fuel weight 4,400 lbs
Basic empty weight –3,200 lbs
payload 1,200 lbs
payload는 항공기가 운송할 수 있는 승객, 수하물, 그리고 화물의 최대 조합이다. 만약 zero fuel weight가 게재되어 있다면 이는 무게 제한 사항이 된다.
3. 최대 payload(1200lb) 시 연료 적재량 계산:
Maximum takeoff weight 5,200 lbs
Zero fuel weight –4,400 lbs
Fuel allowed 800 lbs
최대 payload라 가정할 때 Zero fuel weight를 초과하는 무게는 반드시 usable fuel로 구성되어야 한다. 이 경우 133.3갤런이다.
4. 최대 연료 적재(180gal) 시 payload 계산:
Basic empty weight 3,200 lbs
Maximum usable fuel +1,080 lbs
Weight with max. fuel 4,280 lbs
Maximum takeoff weight 5,200 lbs
Weight with max. fuel -4,280 lbs
Payload allowed 920 lbs
최대 연료라 가정할 경우 payload는 weight with max. fuel과 maximum takeoff weight의 차이이다.
일부 multiengine airplanes는 maximum takeoff weight를 초과하는 ramp weight를 가진다. ramp weight이란taxi 및run-up 도중 소모될 연료에 대한 허용량이다. 이륙 활주 시작 시 항공기의 무게가 maximum takeoff weight보다 높아서는 안 된다.
maximum landing weight는 특정 값을 초과하는 무게로 착륙하는 것을 제한한다. 때문에 비행기가 목적지에 도달하였을 때의 무게가 maximum landing weight 이하가 되도록 비행 전에 연료 소모를 계획해야 한다. 즉각적인 착륙을 필요로 하는 비상 상황일 때 landing weight가 초과되는 경우 조종사는 비행기에 설계된 구조적 여유를 이용할 수 없음을 인지해야 한다. overweight landing inspection이 필요할 수 있으므로 매뉴얼을 참조하거나 제조업체에 문의한다.
weight and balance의 balance 또한 중요하다. envelope 내에서의 CG 이동에 따라 multiengine airplane의 비행 특성이 상당히 변화한다.
forward CG에서 비행기는 더 안정적이다(약간의 높은 실속 속도, 약간의 낮은 순항 속도, 그리고 유리한 실속 특성). aft CG에서 비행기는 덜 안정적이다(약간의 낮은 실속 속도, 약간의 높은 순항 속도, 그리고 유리하지 못한 실속 특성). forward CG limits는 보통 landing round out에서의elevator/stabilator authority를 통해 결정된다. aft CG limits는 허용 가능한 최소 세로 안정성에 의해 결정된다. weight and balance 수치를 초과하는 것은 항공기의 운용 한계(operating limitations)와14 CFR에 반하는 것이다.
몇몇 multiengine airplanes의 경우 특정 적재 조건에서 CG limits 이내를 유지하기 위해 ballast를 필요로 할 수 있다. 일부 모델의 경우 오직 학생과 교관만 비행기에 탑승하였을 때 forward CG limit 초과를 피하고자 aft baggage compartment에 ballast를 배치할 수 있다. 일부 모델의 경우 승객들이 맨 뒷좌석에 앉았을 때 aft CG limit 초과를 피하고자 nose baggage compartment에 ballast나 수하물을 배치할 수 있다. 조종사는 envelope 내로 CG를 달성하기 위해 승객의 좌석과 수하물의 배치를 지시해야 한다. AFM/POH의 weight and balance section은 보통 적재 권장사항을 명시한다. ballast가 배치된 경우 이는 단단히 고정되어야 하며 그 무게가maximum allowable floor loading을 초과해서는 안 된다.
몇몇 비행기들은 특별한 weight and balance plotter를 사용한다. 이는 CG envelope가 인쇄된 plotting board 위에서 조정될 수 있다. plotter의 뒷면은 보통 특정 항공기를 위한 적재 권장사항을 포함한다. plotting board의 작업 면에 인쇄된 CG envelope에 직접 연필 선을 표기할 수 있다. 이 연필 선은 쉽게 지워지므로 매 비행마다 계산을 다시 수행할 수 있다. 이러한 plotter는 해당 비행기 모델에서만 사용되어야 한다.
단발 비행기에서 배운 좋은 습관은 다발 비행기에도 직접적으로 적용된다. 다발 비행기를 처음 타보는 조종사는 비행기가 지상 활주를 시작하면 몇 가지 다른 점들을 알아차릴 수 있다. 가장 두드러지는 것은 날개 길이가 증가하였으므로비좁은 장소에서 지상 활주를 할 때 더욱 주의해야 한다는 것이다. 지상 조작이 다소 둔하게 느껴질 수 있으며 전형적인 2인용 ·4인용단발 비행기만큼 민첩하지 않다. 항상 그렇듯이 엔진 출력을 최소로 유지해서 브레이크를 밟지 않도록 주의해야 한다. 단발 비행기에는 없는 다발 비행기의 이점 중 하나는 차등한 출력을 사용할 수 있다는 것이다. 선회를 돕기 위해 차등한 출력을 사용하면 선회 중 브레이크를 사용해야 할 필요성과 선회 반경이 둘 다 최소화 된다.
허나 브레이크와 차등한 출력을 통해 급선회를 수행하면 선회 안쪽 방향 wheel과 landing gear가 움직이지 않는 상태에서 항공기가 선회한다는 것을 인지해야 한다. 비행기는 이러한 움직임에 대해 설계되지 않으므로 조종사는 이를 조심해야 한다. AFM/POH에 의해 달리 명시되지 않은 한 모든 ground operations는 cowl flaps를 완전히 연 상태로 수행되어야 한다. strobe lights는 보통 활주로에 진입할 때 켠다.
이륙 전 안전 브리핑과 before takeoff checklist를 완료하였으며ATC clearance를 받았다면조종사는 접근 중인 항공기가 있는지 확인한 후에 활주로 중심선에 비행기를 정렬해야 한다. 관제탑이 운영되지 않은 공항에서 출항하는 경우에는 라디오 주파수를 확인해야 하고, 항적을 꼼꼼히 확인해야 하며, 활주로에 진입하기 전에 radio advisory를 전송해야 한다. 급선회를 하여 활주로에 진입한 후에 rolling takeoff를 하는 것은 좋지 못하며 이는 fuel tank pickup을 “unporting”할 수 있어서 AFM/POH에 의해 금지될 수 있다. 특정 연료 양 이하라면 AFM/POH에 의해 이륙 자체가 금지될 수 있다. 만약 측풍이 존재한다면 조종간을 측풍쪽으로 가해야 한다. 외부 등화들(예를 들어 landing light와 taxi light)과 wingtip strobes는 낮밤 상관 없이 이륙 활주를 시작하기 전에 반드시 켜야 한다. 이륙 지점에서 대기해야 하는 경우에는 해당 위치로 이동하는 동안 모든 외부 등화를 켜야 한다(특히 야간일 때).
AFM/POH에서 권장하는 이륙 출력을 설정해야 한다. 자연 흡기식 엔진의 경우에는 보통 full throttle을 적용해야 한다. 대부분의 turbocharged engines에서도 full throttle이 사용된다. 허나 일부 turbocharged engines에서는 조종사가 특정한 출력 세팅(보통manifold pressure의red line바로 아래에 해당하는 출력 세팅)을 설정하도록 요구한다. 이는 full throttle보다는 낮은 이륙 출력을 만들어낸다. turbocharged engines를 사용하는 경우에는 특별히 고려해야 할 사항이 있다. 이러한 엔진에서는throttle을 부드럽고 신중하게 움직여야 한다. throttle을 전진할 때 브레이크를 통해 항공기를 제자리에 정지시키는 것이 허용된다. 보통 turbocharger에서 상당한 boost가 발생한 이후에 브레이크를 해제한다. 이는 엔진 출력을 천천히 증가시킬 때보다 활주로 낭비를 줄여준다. 만약 활주로 길이나 장애물 회피가 중요하다면 performance charts에 명시된 대로 브레이크를 해제하기 전에 최대 출력을 적용해야 한다. 정속 프로펠러를 장착한 비행기의 경우에는 브레이크가 해제되기 전에 엔진이 최대 rpm으로 회전할 수 있으며 최대 출력이 만들어질 수 있다. 비록 프로펠러 회전 당 공기의 질량은 적지만 rpm이 높아서 프로펠러 추력이 최대가 된다. 이륙 활주시작 시 추력이 최대가 되며 이후 비행기 속도가 증가함에 따라 감소한다. 이륙 도중 발생하는 높은 slipstream 속도가 프로펠러 뒤에 놓인 날개의 실질적인 양력을 증가시킨다.
이륙 출력이 설정되면 먼저 활주로 중심선을 유지하고 엔진 계기들을 확인하는 것에 주의를 분산해야 한다. 초보 다발 비행기 조종사들은 보통 이륙 활주가 시작되자마자 속도계에 fixate 되려는 경향이 있다. 그러기보다는 양 쪽 엔진이 최대 manifold pressure와 rpm을 만들어내는지 확인해야 한다. 또한 fuel flows, fuel pressures, EGTs(exhaust gas temperatures), 그리고 oil pressures가 정상 범위에 있는지 확인해야 한다. 이러한 체계적인 점검은 비행기가 rotation speed에 도달하기 훨씬 전에 완료될 수 있다. 만약 측풍이 존재한다면 항공기가 가속함에 따라 측풍으로 가해둔 aileron을 풀어줄 수 있다. elevator/stabilator control은 내내 neutral로 유지되어야 한다.
매 이륙 시 최대 정격 이륙 출력이 사용되어야 한다. 출력의 일부분만 사용하는 이륙은 권장되지 않는다. 출력을 일부분만 사용한다 해서 현대의 왕복 엔진 수명이 연장된다는 증거는 없다. 오히려 출력을 일부분만 사용하면 과도한 열과 엔진 마모가 발생할 수 있다. 왜냐하면 이륙 도중 엔진 냉각에 필수적인 over-rich mixture가 fuel metering system으로부터 공급되지 못하기 때문이다.
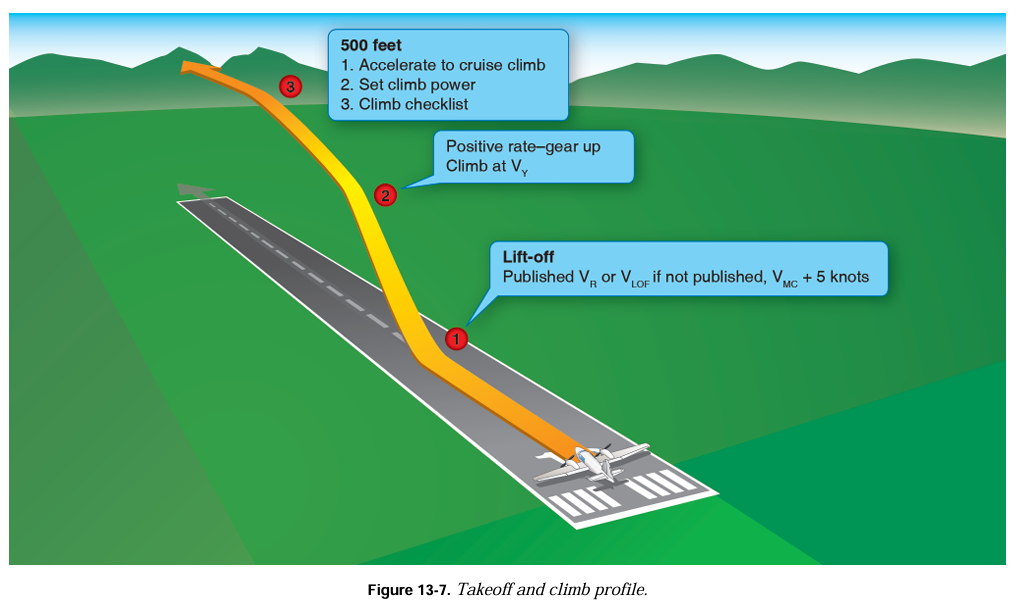
다발 비행기로 이륙 및 상승을 수행할 때 주의해야 할 몇 가지 중요한 속도들이 있다. 첫 번째 속도는 VMC이다. 비행기가 지상에 있을 때 VMC미만의 속도에서 엔진이 고장나면 이륙을 중단해야 한다. 즉시 양 쪽 throttle을 닫고 rudder와 브레이크를 사용해야 방향 제어가 유지될 수 있다. 공중에 있을 때 VMC 미만의 속도에서 엔진이 고장난 경우에는 이륙 출력을 생산하는 남은 엔진만으론 방향 제어를 할 수 없다. 따라서 대기속도가 VMC를 초과하기 전까지는 비행기가 절대 이륙해선 안 된다. 조종사는 제조업체가 권장하는 rotation speed (VR)나 lift-off speed(VLOF)를 사용해야 한다. 만약 이러한 속도가 게재되지 않았다면 VMC 속도에 5노트를 더한 값이 VR로 사용되어야 한다.
부드러운 조종간 입력을 통해 이륙 자세로 rotate 한다. 측풍이 불면 편류가 존재하므로 조종사는 비행기가 이륙한 후에 landing gear가 순간적으로 활주로에 닿지 않도록 해야 한다. 이러한 상황에서는 rotation을 더 적극적으로 및/혹은 더 높은 속도에서 수행할 수 있다. 단,accelerate-stop distance, takeoff ground roll, 그리고 distance to clear an obstacle을 위한 AFM/POH 성능 수치들은 VR 및/혹은VLOF에서 계산되었다는 것을 반드시 유념해야 한다.
이륙한 후에는 최대한 빠르게 고도를 얻는 것을 고려해야 한다. 일부 AFM/POH는 이륙 및 초기 상승과 관련하여 조종사에게 도움을 주기 위해 “50-foot”나“50-foot barrier” speed를 제공하며이는 rotation, lift-off, 그리고 VY 가속 도중 target airspeed로 사용된다. 이륙 전에 조종사는 지상으로부터 50ft(AGL)까지의 takeoff distance와 50ft AGL에서의 stopping distance를 확인하고 이 둘을 더해야 한다. 만약 활주로가 총합보다 짧다면 엔진 고장 발생 시 활주로를 초과해서 착륙할 가능성이 매우 높다. 지면으로부터 부양한 후에는 과도한 속도를 얻는 것보다 추가 고도를 얻는 것이 더 중요하다. 경험에 의하면 엔진 고장 발생 시 과도한 속도가 고도로 효율적이게 전환될 수 없다. 추가 고도는 상승 도중 발생한 항공기의 이상이나 비상 상황을 인지 및 대응하는데 사용할 수 있는 시간을 증가시킨다.
과도한 상승 자세는 과도한 속도만큼이나 위험할 수 있다. 가파른 상승 자세는 전방 시야를 제한하며 조종사가 다른 항적을 확인하고 피할 능력을 방해한다. VY(best all-engine rate-of-climb speed)를 얻기 위해 비행기는 얕은 상승 자세에서 가속되어야 한다. 그런 다음 지형과 장애물을 고려한 safe single-engine maneuvering altitude에 도달하기 전까지 VY를 유지한다. VY보다 높거나 낮은 속도는 비행기의 성능을 저하시킨다. 설령 모든 엔진이 정상적으로 작동하더라도 이륙 후 초기 상승 시 지형 및 장애물과의 간격은 비행 전에 고려해야 할 중요한 사항이다.대부분의 여객기와 대부분의 터빈 비행기는 보통 FMS(flight management system)를 통해 VY(best rate of climb)가 만들어지는 자세로 상승한다.
이륙 후 landing gear를 올리는 시기는 몇 가지 요인에 따라 달라진다. 보통착륙을 위한 활주로가 충분하지 않고 고도계에 positive rate of climb가 표시되면 gear를 올려야 한다. 착륙을 위한 활주로가 많이 남아 있어서 장시간 동안 landing gear를 내려놓으면 상승 성능과 가속이 희생되므로 이는 현명하지 못하다. 활주로에 착륙이 이루어질 수 없는 시점을 지난 후에도 gear를 내려두는 것은 위험하다. 일부 다발 비행기의 경우에는 높은 밀도 고도에서landing gear가 내려진 상태로 positive rate of climb를 수행할 수 없다. 이러한 조건에서 positive rate of climb를 기다리는 것은 현실적으로 불가능하다. 기억해야 할 중요한 점은 이륙 후 엔진 고장이 발생하였을 때 landing gear를 최대한 빠르게 올리면 항력이 급격히 감소하고 상승 성능이 상당히 증가한다는 것이다. 마찬가지로 기억해야 할 중요한 점은 gear를 내린 상태로 활주에 착륙이나 overrun을 수행하는 것이 gear를 올린 상태로 착륙하는 것보다 훨씬 낫다는 것이다. 보통VYSE속도를 넘기 전에 landing gear를 올리는 것이 권장되며 gear가 올라간 후에도 상승 성능이 적절하다면 계속하여 상승한다. 일부 AFM/POH는 이륙 후 landing gear를 올리기 전에 바퀴의 회전을 멈추기 위하여 잠깐 브레이크를 적용하도록 지시한다. 만약 이륙을 위해 flap이 연장되어 있다면 AFM/POH에서 권장하는 대로 flap을 올려야 한다.
safe single-engine maneuvering altitude(보통 최소 400~500ft AGL)에 도달하면 en route climb speed로 전환해야 한다. 이 속도는 VY보다 높으며 보통 순항 고도까지 유지된다. en route climb speed는 더 좋은 시야, 더 좋은 엔진 냉각, 그리고 더 높은 groundspeed를 제공한다. 적절하다면en route climb speed로 전환하는 동안 이륙 출력을 줄일 수 있다.
일부 비행기들의 AFM/POH에는 권장사항으로(혹은 때때로 제한 사항으로) 게재된 상승 출력 세팅이 있으며이는 en route climb 도중 설정되어야 한다. 만약 상승 출력 세팅이 게재되어있지 않다면 en route climb를 위해 manifold pressure와 rpm을 다소 낮추는 것이 관례적이다(허나 필수 조건은 아님). 보통 첫 출력 감소 이후에 프로펠러들을 synchronize 하며만약 yaw damper가 설치되어 있다면 이를 작동시킨다. 또한 상승 도중 mixture를 lean 하라고 AFM/POH에서 권장할 수도 있다. 항적과 업무량이 허락한다면 climb checklist를 수행해야 한다. [그림 13-7]