항공기를 안전하게 비행하기 위해선 비행계기를 해석 및 조작하는 방법을 이해해야 한다. 또한 조종사는 이러한 계기들과 관련된 오류와 고장을 인지할 수 있어야 한다. 이 장은 pitot-static system 및 이와 연관된 계기들, vacuum system 및 이와 연관된 계기들, gyroscopic instruments, 그리고 magnetic compass를 다룬다. 각 계기의 작동 방법을 이해하며 계기 고장을 인지할 수 있다면 조종사는 계기들을 최대로 활용할 수 있다.
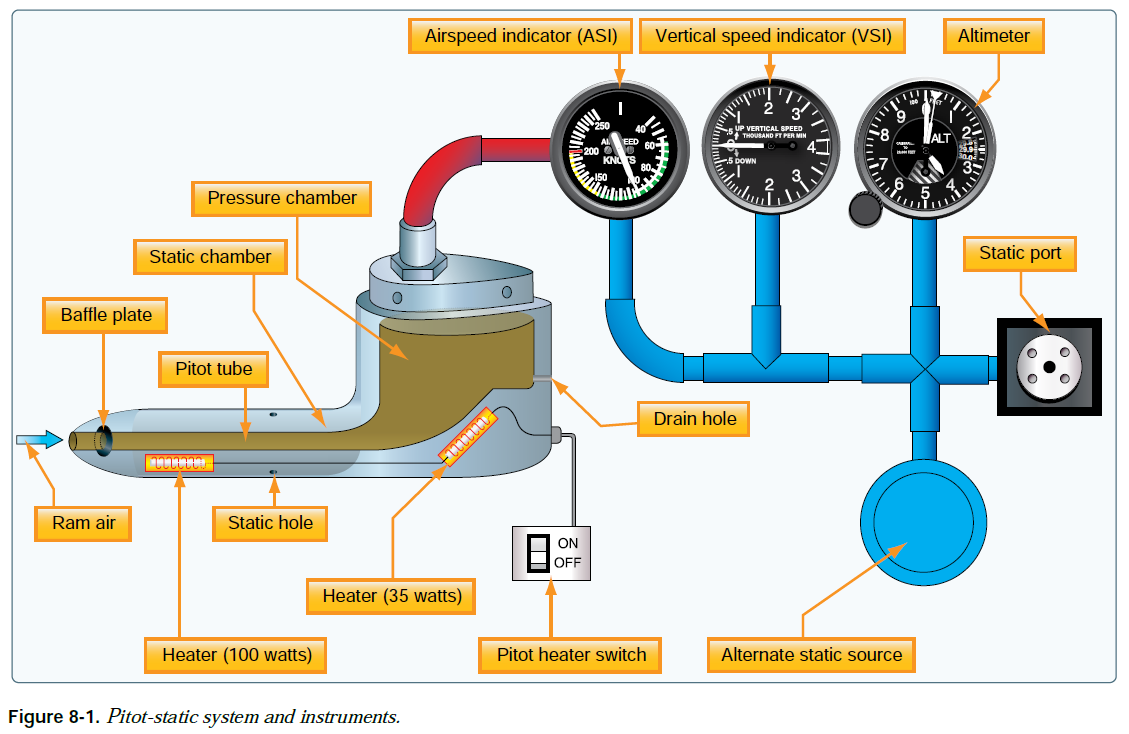
pitot-static system은 정압과 동압을 활용하는 시스템이다. 이러한 압력들은 속도계(ASI), 고도계(Altimeter), 그리고 VSI(vertical speed indicator)를 작동하기 위해 사용된다. [그림 8-1]
Impact Pressure Chamber and Lines
pitot tube는 항공기가 움직일 때 존재하는 총 압력을 측정하는데 사용된다. 정압은 항공기가 움직이는 상태이든 정지한 상태이든 항상 존재한다.동압은 항공기가 움직일 때에만 존재한다. 따라서 이는 움직임으로 인한 압력이라 생각될 수 있다. 바람 또한 동압을 발생시킨다. 정지된 공기를 항공기가 70노트의 속도로 통과하고 있든정지된 항공기가 70노트의 바람을 맞고 있든 동일한 동압이 발생한다.
항공기의 기수로부터 90도 미만에서 바람이 불면 동압이 속도계에 표시될 수 있다. 20노트의 속도로 에어포일을 이동하는 바람은 정지된 공기를 항공기가 20노트로 통과하는 것과 같다. pitot tube는 동압뿐만 아니라 정압도 포착한다.
pitot tube의 앞부분에는 작은 구멍이 있다. 이는 총 압력이 pressure chamber로 들어갈 수 있도록 해준다. 총 압력은 동압과 정압의 합으로 구성된다. chamber의 뒤에 또 다른 작은 구멍이 있는데이는 항공기가 강수에 진입할 때 시스템으로부터 수분을 배출할 수 있도록 해준다. 비행 전에 pitot tube의 두 구멍들이 막혀있지는 않은지 확인해야 한다. 항공기가 장시간 운영되지 않는 경우에는 pitot tube covers를 씌운다. 이는 벌레와 그 외 물체들이 pitot tube 구멍에 끼는 것을 방지한다.
pitot tube를 사용하는 계기들 중 하나는 ASI이다. 총 압력은 작은 관을 통해 pressure chamber에서 ASI로 전달된다. 정압 또한 ASI의 반대쪽으로 전달되며이로 인해 두 개의 정압이 서로 상쇄돼서 동압만이 계기에 표시된다. 동압이 변화하면 ASI는 증가/감소를 나타낸다. 남은 두 계기(고도계와 VSI)는 정압만을 사용한다.
Static Pressure Chamber and Lines
static chamber는 항공기 측면의 작은 구멍들을 통해 연결된다. 대기압이 변화하면 압력이 line(계기와 static system을 연결하는 라인)을 따라 계기의 안팎으로 자유롭게 이동할 수 있다. 일부 항공기는 primary static source가 차단될 경우를 위해 alternate static source를 제공한다. alternate static source는 보통 조종실 내에 있다. fuselage 주위를 흐르는 공기의 벤투리 효과로 인해 조종실 내부의 기압은 외부의 기압보다 낮다.
alternate static source가 사용되면 다음과 같은 계기 지시가 나타난다:
1. 고도계는 실제보다 약간 높은 고도를 나타냄.
2. 속도계는 실제보다 약간 높은 속도를 나타냄.
3. VSI는 순간적으로 상승을 지시한 다음 안정화됨(단, 고도가 일정하게 유지된 경우).
alternate static course를 사용하였다면 오차의 양을 결정하기 위해 AFM/POH를 참조해야 한다. 만약 alternate static source를 갖추지 않은 항공기에서 static source가 막혔다면 VSI의 유리 표면을 깨는 것이 정압을 유입하는 방법이 된다. 이로 인해 VSI가 작동하지 않을 가능성이 높다. 깨트릴 계기로 VSI를 선택한 이유는 VSI가 가장 덜 중요한 정압 계기이기 때문이다.
Altimeter
고도계는 특정 기압면(pressure level)으로부터의 항공기 높이를 측정하는 계기이다.고도계는 고도를 표시할 수 있는 유일한 계기이므로 이는 항공기에 설치된 가장 중요한 계기들 중 하나이다. 고도계를 효과적으로 사용하려면 조종사는 계기의 작동 방법, 고도계와 관련된 오차들, 그리고 오차들이 고도계 지시에 미치는 영향을 이해해야 한다.
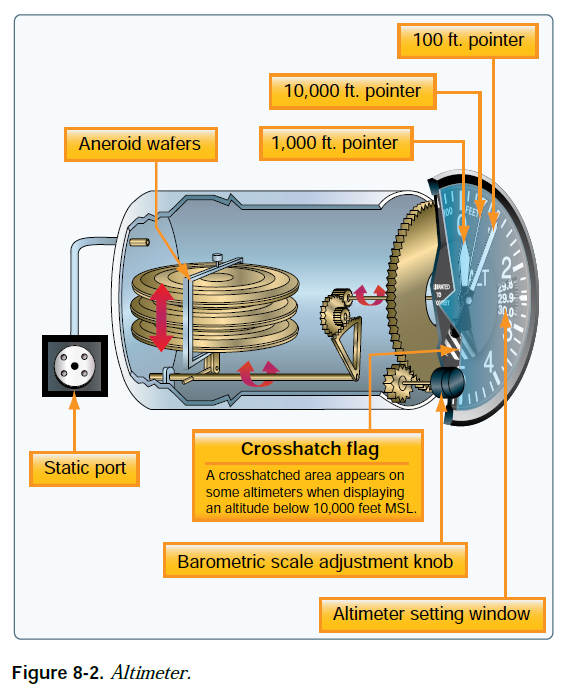
aneroid wafers는 고도계의 주요 구성 요소이다. aneroid wafer는 29.92"Hg의 압력으로 밀봉된다. 이러한 wafers는 정압의 변화에 따라 자유롭게 팽창/수축할 수 있다. 높은 정압은 wafers를 수축하게 만든다. 반면 낮은 정압(29.92"Hg 보다 낮은)은 wafers를 팽창하게 만든다. 기계적 연결 장치는 wafer의 움직임을 계기 지시침과 연결하며이는 wafer의 수축을 고도 감소로, 그리고 wafer의 팽창을 고도 증가로 변환한다. [그림 8-2]
정압이 어떻게 고도계 케이스의 뒷면으로 유입되는지 확인한다. 고도계 케이스는 밀봉되어 있으므로 정압이 aneroid wafers를 감쌀 수 있다. 만약 정압이 aneroid wafers의 압력(29.92"Hg)보다 높다면 wafers가 수축한다. 반대로 정압이 wafers의 압력보다 낮다면 wafers가 팽창한다. wafers의 수축/팽창은 기계적 연결 장치를 움직여서 고도계 지시침을 구동한다.
Principle of Operation
기압 고도계는 고도계가 위치한 고도에서의 대기 압력을 측정하는 아네로이드 기압계로이는 고도를 feet 단위로 나타낸다. 고도계는 작동을 위해 정압을 사용한다. 해수면에서는 공기 밀도가 높으며 고도가 높아질수록 대기압이 감소한다. 고도에 따른 압력 차이로 인해 고도계가 고도 변화를 지시한다.
고도계가 고도를 표시하는 방법은 고도계의 유형에 따라 다르다. 지시침이 한 개인 고도계가 있는 반면 지시침이 두 개 이상인 고도계도 있다. 이 교재에서는 두 개 이상의 지시침을 갖춘 고도계만 설명한다. 고도계의 다이얼은 보통 0부터 9까지 시계 방향으로 배열된다. aneroid의 움직임은 기어를 통해 세 개의 지시침들로 전달된다. 그림 8-2에서 역삼각형이 달린 길고 가는 지시침은 10,000ft를,짧고 넓은 지시침은 1,000ft를, 그리고 긴 지시침은 100ft를 나타낸다.
허나 이러한 고도 값은 해수면 기압이 표준(29.92"Hg) 상태이고, 해수면 공기 온도가 표준(섭씨 +15도, 혹은 화씨 59도) 상태이며, 고도 증가에 따른 기압 감율과 온도 감율이 표준 상태인 경우에만 정확하다. 보정된 압력을 barometric scale에 설정하면 비표준 압력이 수정된다. barometric pressure window는Kollsman window라고도 불리는데이를 통해 고도계가 설정된 후에만 correct altitude가 표시된다. 다양한 유형의 고도를 지칭할 때에는 “correct”라는 단어가 제대로 설명되어야 한다(이 경우에는 해수면으로부터의 대략적인 고도를 나타내기 위해 "correct"라는 단어가 사용됨). 즉, indicated altitude는 barometric pressure setting만이 입력된 uncorrected altitude를 의미한다.
(ATP: corrected altitude [approximate true altitude]는 표준 대기 온도로부터의 온도 차이가 보정된 지시 고도이다.)
Effect of Nonstandard Pressure and Temperature
대기압과 온도가 일정하게 유지된다면 지상으로부터 일정한 고도를 유지하는 것이 쉽다. 허나 이러한 경우는 거의 없다. 심지어 local flight 도중에도 이착륙 사이에 기압과 온도가 변화할 수 있다. 이러한 변화를 고려하지 않으면 비행이 위험해진다.
비표준 압력에 대해 고도계를 보정하지 않으면 위험한 상황이 발생할 수 있다. 예를 들어 고도계를 수정하지 않고 고기압 영역에서 저기압 영역으로 비행할 경우 실제 고도는 지시 고도보다 낮다. 오래된 항공 격언이 있다: “GOING FROM A HIGH TO A LOW, LOOK OUT BELOW.” 고도계 수정 없이 저기압 영역에서 고기압 영역으로 비행할 경우 실제 고도는 지시 고도보다 높다. 비행 도중 지형/장애물 회피를 위해 최신 altimeter settings를 자주 얻는 것이 좋다.
대부분의 고도계는 31.00"Hg를 초과도록 조정될 수 없다. 더 높은 기압으로 고도계를 설정할 수 없다면 항공기의 실제 고도가 지시 고도보다 높다. 기압이 낮은 조건(28.00"Hg 미만)에서 실제 altimeter setting을 설정할 수 없다면 비행이 권장되지 않는다.
비표준 압력을 보상하기 위한 보정이 비표준 온도를 보상하지는 않는다. 찬 공기는 따뜻한 공기보다 밀도가 높다. 따라서 표준 온도보다 낮은 온도를 운영하는 경우에는 실제 고도가 지시 고도보다 낮다. [그림 8-3] 오차의 정도는 온도 차이의 정도에 따라 달라진다. 보통 조종사가 우려하는 것은 더 추운 온도로 인한 오차이다. 일정한 지시 고도를 유지하면서 더 추운 곳으로 비행하면 진고도가 낮아진다. 순항 고도를 선택하는데 있어 지형/장애물 회피가 중요한 요소인 경우에는다음을 기억하라: 표준 온도보다 낮은 온도에서는 항공기가 지시 고도보다 낮은 곳에 위치할 수 있다. 따라서 충분한 지형 회피를 위해 지시 고도가 더 높아야 할 수 있다. “FROM HOT TO COLD, LOOK OUT BELOW.” 표준 온도보다 높은 온도를 운영하는 경우 실제 고도가 지시 고도보다 높다.온도에 대한 고도 보정은 navigation computer를 통해 계산될 수 있다.
매우 낮은 온도는 고도계 지시에 영향을 미친다. [그림 8-4]이 차트는 매우 낮은 온도에서 얼마나 많은 오차가 존재하는지를 나타낸다.
Setting the Altimeter
대부분의 고도계에는 barometric pressure setting window(혹은 Kollsman window)가 있으며이는 고도계를 수정할 수단을 제공한다. 이러한 수정을 위해 계기의 하단에 knob가 위치한다.
대기압의 변화에 대해 고도계를 수정하기 위해선 altimeter setting window의 pressure scale("Hg 및/혹은 mb로 눈금 됨)을 특정 altimeter setting으로 조정해야 한다. altimeter setting은 station pressure를 해수면 기압으로 보정한 것이다(ATP: station이나 airport의 field elevation에서 측정된 실제 압력이 station pressure이다). altimeter setting은 reporting station 근처에서만 정확하므로 하나의 station에서 다음 station으로 비행이 진행됨에 따라 고도계가 조정되어야 한다. 최신의 altimeter settings가 있다면 ATC가 이를 알려줄 것이다. 조종사가 ATC의 지원을 받지 않는 경우에는AWOS/ASOS(automated weather observing system/automated surface observation system)나 ATIS(automatic terminal information service)를 통해local altimeter settings를 얻을 수 있다.
최신 altimeter setting이 기압의 불규칙성을 보상하리라 기대되지만 이것이 항상 사실이지는 않다. 지상국으로부터 방송되는 altimeter setting은 station pressure를 해수면 기압으로 보정한 것이다.이는 더 높은 수준의 불규칙성(특히 비표준 온도의 영향)은 고려하지 않는다. 특정 지역의 모든 조종사들이 동일한 altimeter setting을 사용하면 모든 고도계들에 동일한 온도 오차와 기압 오차가 적용되므로 항공기 간 수직 거리가 유지될 수 있다(ATP: 따라서 조종사는 altimeter 설정 시 비표준 기온과 비표준 압력에 대한 영향을 무시해도 된다). 허나 이것이 수직 분리를 보장하지는 않는다. 다른 항적에 대한 육안 확인을 수행하는 것은 여전히 필수적이다.
높은 산악 지형 상공을 비행할 때 특정 대기 조건으로 인해 고도계가 실제 고도보다 1,000ft 이상 높은 고도를 나타낼 수 있다. 때문에 고도계 오차, 그리고 하강 기류의 가능성을 위해 고도 여유가 있어야 한다.
altimeter setting system을 사용하는 방법을 설명하기 위해 Dallas Love Field, Texas에서 Mineral Wells를 거쳐 Abilene Municipal Airport, Texas로 향하는 비행을 예시로 든다. Love Field에서 이륙하기 전에 조종사는 관제탑이나ATIS로부터 최신 altimeter setting(29.85"Hg)을 받았으며 이를 altimeter setting window에 설정하였다. 그런 다음 고도계 지시를 공항 표고(487ft)와 비교해야 한다. 대부분의 고도계는 완벽하게 보정되지 않으므로 오차가 있을 수도 있다.
Mineral Wells를 통과할 때 조종사는 최신 altimeter setting(29.94"Hg)을 받았으며 이를 altimeter window에 설정하였다. Abilene Municipal Airport의 장주 패턴에 진입하기 전에 Abilene Control Tower로부터 새로운 altimeter setting(29.69"Hg)을 받았고 이를 altimeter setting window에 설정하였다. Abilene의 공항 표고(1,791ft)로부터 대략 800ft의 고도로 장주 패턴을 비행하길 원한다면 2,600ft의 지시 고도를 유지해야 한다(1,791ft + 800ft = 2,591ft).
고도계를 올바르게 설정하는 것은 매우 중요하다. Abilene에서 최신 altimeter setting을 설정하지 않고 Mineral Wells의 altimeter setting(29.94"Hg)을 계속 사용했다 가정해보자. 이때 Abilene traffic pattern을 2,600ft의 지시 고도로 진입하면 항공기가 장주 패턴 고도로부터 대략 250ft 아래에 있을 것이다. 착륙 시 고도계는 공항 표고보다 약 250ft 더 높게 지시할 것이다.
(1인치의 압력은 대략 1,000ft의 고도와 같다. 따라서 0.25 x 1,000ft = 250ft.)
고도계 오차를 더할지 뺄지 결정할 때 다음을 기억하라: 실제 압력이 altimeter window에 설정된 것보다 낮다면 항공기의 실제 고도는 지시 고도보다 낮다. 다음은 고도계 오차를 계산하는 또 다른 방법이다. 먼저29.94"Hg에서 최신 altimeter setting을 뺀다. 항상 기존 altimeter setting에서 최신 altimeter setting을 뺀다.
(1인치의 압력은 대략 1,000ft의 고도와 같다. 따라서 0.25 x 1,000ft = 250ft.) 항상 지시 고도에서 이 값을 뺀다.
이번에는 altimeter setting을 29.94에서 30.56으로 조정해보자.
(1인치의 압력은 대략 1,000ft의 고도와 같다. 따라서 0.62 x 1,000ft = 620ft.) 항상 지시 고도에서 이 값을 뺀다.
조종사는 620ft 더 높은 고도에 있다.
현재의 지시 고도(2,600ft)에서 음수를 빼는 것은 더하는 것과 같다. 이를 통해 조종사는 최신 altimeter setting의 중요성을 더 제대로 이해할 수 있다(오차를 잘못 계산하는 경우에도 안전에 영향을 미칠 수 있다. 만약 지시 고도보다 실제 고도가 낮다면 항공기가 장애물과 충돌할 위험이 있다).
Altimeter Operation
고도계의 지시침은 두 가지 방법을 통해 움직일 수 있다. 하나는 기압이 변화하는 경우이고 하나는 barometric scale을 조정하는 경우이다. 항공기가 상승/하강을 수행하면 고도계 케이스 내의 압력 변화가 aneroid barometer를 팽창/수축시킨다. 이러한 팽창/수축은 기계적 연결 장치를 통해 전달되어 지시침을 회전시킨다.
압력이 감소하면 고도계가 고도 증가를 지시한다. 반면 압력이 증가하면 고도계가 고도 감소를 지시한다. 따라서 지상에 주기된 항공기의 기압면이 29.98"Hg에서 29.68"Hg로 변화하면 고도계는 약 300ft의 증가를 나타낼 것이다. 이러한 압력 변화는 항공기가 밤새 주기되어 있었을 때 가장 두드러진다. 압력이 떨어지면 고도계는 이를 상승으로 해석한다. 고도계는 공항 표고보다 높은 고도를 나타낸다. barometric pressure setting이 최신 altimeter setting(29.68"Hg)로 설정되면 공항 표고가 다시 고도계에 나타난다.
비행 도중에는 이러한 압력 변화가 쉽게 감지되지 않는다. 왜냐하면 항공기는 특정 고도를 비행하기 때문이다. 지시 고도가 유지되는 동안 항공기의 실제 고도는 계속 감소한다.
항공기의 고도를 아는 것은 조종사에게 매우 중요하다. 조종사는 경로를 따라 위치한 가장 높은 지형이나 장애물을 회피할 수 있을 정도로 높이 비행하고 있는지 확인해야 한다. 저시정 조건인 경우에는 정확한 고도 정보를 확보하는 것이 중요하다. 장애물 회피를 위해 조종사는 항공기의 고도와 주변 지형의 높이를 지속적으로 인지해야 한다. 공중 충돌 가능성을 줄이기 위해서는 항공 교통 규칙에 따라 고도를 유지하는 것이 필수적이다.
Types of Altitude
고도는 그 유형이 구체적으로 명시되는 경우에만 적절한 용어이다. “altitude”라는 용어가 사용되었다면 이는 보통 해수면으로부터의 고도를 의미한다. 왜냐하면 이러한 고도가 장애물, 공역, 그리고 항적 분리에 사용되는 고도이기 때문이다.
고도란 특정 지점이나 수평면으로부터의 수직 거리이다. 고도가 측정되는 기준면이 다양한 만큼 여러 유형의 고도가 있다. 각각의 고도는 특정한 이유로 인해 사용될 수 있다. 조종사는 주로 다섯 가지 유형의 고도에 관심이 있다:
1. Indicated altitude – 최신 altimeter setting으로 설정되어 있을 때 고도계가 지시하는 값(uncorrected).
2. True altitude – 해수면으로부터의 항공기 수직 거리(실제 고도). 진 고도는 보통MSL(평균해수면)으로부터 feet 단위로 표시된다. 항공 차트의 공항, 지형, 그리고 장애물의 표고는 진고도이다.
3. Absolute altitude – 지형으로부터의 항공기 수직 거리(AGL – above ground level).
4. Pressure altitude – altimeter setting window(barometric scale)가 29.92"Hg로 조정되었을 때 지시되는 고도. 이는 standard datum plane으로부터의 고도이다. standard datum plane이란 공기압(섭씨 15도로 보정된)이 29.92"Hg인 이론상의 평면이다. 기압 고도는 밀도 고도, 진고도, 진대기속도(TAS), 그리고 그 외 성능 데이터를 계산하는데 사용된다.
5. Density altitude – 표준 온도로부터의 변화가 보정된 기압 고도. 표준 조건인 경우에는 기압 고도와 밀도 고도가 같다. 만약 온도가 표준 온도보다 높다면 밀도 고도가 기압 고도보다 높다. 만약 온도가 표준 온도보다 낮다면 밀도 고도가 기압 고도보다 낮다. 밀도 고도는 항공기의 성능과 직결되기 때문에 중요한 고도이다.
조종사는 항공기 성능이 공기 밀도와 어떻게 연관되는지를 이해해야 한다. 공기의 밀도는 자연 흡기 엔진의 출력과 에어포일의 효율성에 영향을 미친다. 대기압이 낮아서 프로펠러가 가속할 공기 분자가 적어지면 rotation speed까지 가속하는데 걸리는 시간이 길어진다. 이는 더 긴 이륙 활주로 이어진다(즉, 성능이 저하된다).
표고가 5,048ft MSL이고 온도가 섭씨 5도인(표준 온도) 공항을 예로 들어보자. 이러한 조건에서는 기압 고도와 밀도 고도가 5,048ft로 동일하다. 만약 온도가 30도로 증가하면 밀도 고도가 7,855ft로 증가한다. 이는 표고가 7,855ft MSL인 공항에서 표준 온도일 때 항공기가 이륙하는 것과 동일하다. 반대로 온도가 섭씨 –25도로 감소하면 밀도 고도가 1,232ft로 감소한다. 이러한 조건에서는 항공기가 훨씬 더 좋은 성능을 발휘할 것이다.
Instrument Check
매 비행 전에 조종사는 고도계의 지시가 적절한지 점검해야 한다. 고도계의 상태를 확인하기 위해 barometric scale을 최신 altimeter setting으로 설정한다. 이는 local airport traffic control tower, FSS(flight service station), 혹은 그 외 신뢰할 수 있는 출처(예를 들어 ATIS, AWOS, 혹은 ASOS)로부터 받을 수 있다. 고도계는 공항의 표고를 나타내야 한다. 만약 고도계 지시가 공항 표고로부터 75ft 이상 벗어났다면 계기를 다시 보정하기 위해 수리소에 문의한다.
Vertical Speed Indicator(VSI)
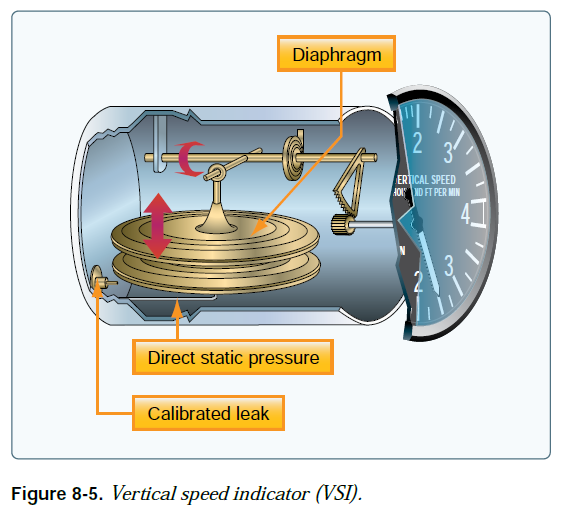
VSI는 항공기가 상승중인지, 하강중인지, 혹은 수평비행중인지 나타낸다. 상승률이나 하강률은 fpm(feet per minute)으로 표시된다. VSI가 올바르게 보정되었다면 이는 수평비행 시 0을 지시한다. [그림 8-5]
Principle of Operation
VSI는 정압만으로 작동하지만 이는 차압계이다. 밀폐된 케이스 내부에 diaphragm이 있으며 이는 지시침과 연결된다. diaphragm의 내부는 pitot-static system의 static line과 직접 연결된다. diaphragm의 외부(즉, 계기 케이스의 내부)는 calibrated leak을 통해 static line과 연결되어 있다.
diaphragm과 케이스는 모두 static line으로부터 현재 고도에서의 대기압을 공급받는다. diaphragm은 제한 없이 공기를 공급받는 반면 케이스는 metered leak을 통해 정압을 공급받는다. 수평 비행 도중에는 diaphragm 내부의 압력과 계기 케이스 내부의 압력이 동일하다. 따라서 지시침은 0을 지시한다. 허나 항공기가 상승/하강을 수행하면 diaphragm 내부의 압력이 즉시 변화하는 반면 케이스는 calibrated leak로 인해 잠시 동안 높은/낮은 압력을 유지한다. 이는 diaphragm을 수축/ 팽창하게 만든다. 이로 인해 압력 차이가 발생하여 계기의 지시침이 상승/하강을 지시한다. 압력 차이가 일정한 비율로 안정화되면 지시침은 고도 변화율을 지시한다.
VSI는 두 가지 유형의 정보를 나타낸다:
∙trend information은 항공기 상승률/하강률의 증감을 즉시 나타낸다.
∙rate information은 고도 변화율을 나타낸다.
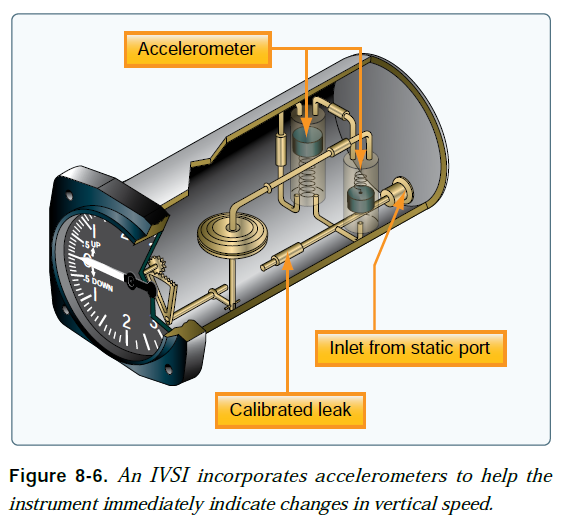
trend information은 VSI 지시침이 움직이는 방향을 의미한다. 예를 들어 직진 비행 도중 조종사가 조종간을 당겨서 기수가 높아지면VSI 지시침이 상승을 나타내기 위해 위로 움직인다. 이때pitch 자세가 일정하게 유지되면 지시침이 몇 초 안(6 ~ 9초)에 안정된 후에 상승률을 나타낸다. 상승률의 초기 변화가 발생한 후 VSI가 새로운 rate를 정확히 지시하기까지 걸리는 시간을 lag라 부른다. 거친 조작과 난기류는 lag를 연장시킬 수 있으며 불규칙하고 불안정한 rate가 지시될 수 있다. 일부 항공기는 IVSI(instantaneous vertical speed indicator)를 장비한다. 이는 전형적인 VSI의 lag를 보상하기 위해 가속도계(accelerometers)를 통합한다. [그림 8-6]
Instrument Check
비행 전 점검 도중 VSI가 올바르게 작동하는지 확인해야 한다. ramp를 떠나기 전에, 그리고 이륙하기 전에 VSI가 0 근처를 나타내는지 확인한다. 만약 VSI가 0이 아닌 다른 값을 나타내고 있다면 이를 zero mark로 참조할 수 있다. 이륙 후 VSI는 positive rate of climb을 나타내기 위해 upward trend를 나타내야 한다. 그런 다음 상승이 안정화되면 상승률을 참조할 수 있다.
Airspeed Indicator(ASI)
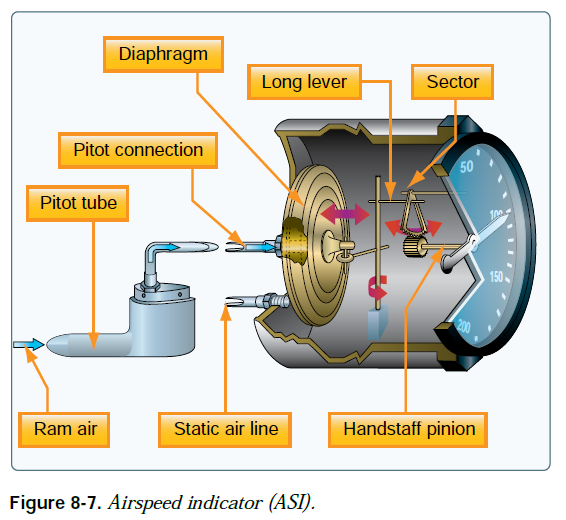
속도계는 pitot pressure와 static pressure의 차이를 측정 및 표시하는 차압계이다. 항공기가 지상에 주기되어 있다면 이 두 압력은 동일하다. 허나 항공기가 비행하는 도중에는 pitot line의 압력이 static line의 압력보다 커진다. 압력 차이는 속도계의 지시침을 통해 나타난다. 계기는 mph나 knots(혹은 둘 다) 나타내도록 눈금된다. [그림 8-7]
속도계는 pitot system과 static system을 둘 다 사용하는 유일한 계기이다. 속도계의 케이스로는 정압이 유입되며diaphragm에는 동압이 유입된다. 동압은 diaphragm을 확장시키거나 수축시킨다. diaphragm은 indicating system과 연결되어 있으며이 시스템이 기계적 연결 장치와 속도계 지시침을 구동한다.
속도에는 다양한 유형이 있다. 조종사는각 유형의 속도를 잘 알아야 한다.
∙Indicated airspeed(IAS) - 속도계로부터 얻은 계기 값. 이는 대기 밀도의 변화, 설치 오차, 혹은 계기 오차에 대해 수정되지 않는다. 제조업체는 항공기 성능을 결정하는 기준으로 이 속도를 사용한다. AFM/POH에 나열된 이륙 속도, 착륙 속도, 그리고 실속 속도는 IAS이며이는 고도나 온도에 의해 변화하지 않는다.
∙Calibrated airspeed(CAS) - 설치 오차와 계기 오차가 수정된 IAS. 제조업체는 속도 오차를 최소화하려 노력한다. 허나 모든 속도 범위에서 모든 오차를 제거할 수는 없다. 특정 속도와 특정 flap 설정에서는 설치 오차와 계기 오차가 수 노트에 이를 수 있다. 이러한 오차는 보통 저속에서 가장 크다. 순항 속도 범위와 고속 범위에서는 IAS와 CAS가 거의 동일하다. airspeed calibration chart를 참조하여 속도 오차를 수정한다.
∙True airspeed(TAS) - 고도와 비표준 온도가 수정된 CAS. 고도가 높아질수록 공기 밀도가 감소하므로 높은 고도에서는 더 빠르게 비행해야 동압과 정압의 압력 차이가 동일해진다. 특정 CAS에 대해 TAS는 고도가 높아질수록 증가한다. 반면 특정 TAS에 대해 CAS는 고도가 높아질수록 감소한다. 조종사는 두 가지 방법을 통해 TAS를 찾을 수 있다. 가장 정확한 방법은 flight computer를 사용하는 것이다. flight computer의 airspeed correction scale을 통해 CAS를 온도와 기압 변화에 대해 수정할 수 있다. 매우 정교한 electronic flight computers를 이용할 수도 있다. CAS, pressure altitude, 그리고 온도를 입력하기만 하면 electronic flight computer가 TAS를 계산한다. 두 번째 방법은 rule of thumb를 통해 대략적인 TAS를 계산하는 것이다. 1,000ft 고도마다 CAS에 2%만 더하면 TAS가 계산된다. TAS는 비행 계획에 사용되는, 그리고 비행 계획서에 사용되는 속도이다.
∙Groundspeed(GS) - 비행기의 실제 속도. 이는 바람이 수정된 TAS이다. 정풍이 불면 GS가 감소하며 배풍이 불면 GS가 증가한다.
Airspeed Indicator markings
1945년 이후에 제조된 12,500 파운드 이하의 항공기는 standard color-coded marking system에 따라 속도계를 표시해야 한다. 이러한 시스템 덕분에 조종사는 항공기의 안전한 운영에 필요한 특정 비행 속도 한계를 한눈에 파악할 수 있다. 예를 들어 기동 도중 속도계 지시침이 yellow arc에 있으며 빠르게 red line으로 근접하고 있다면 즉시 속도를 줄여야 한다.
단발 소형 항공기의 속도계는 다음과 같은 standard color-coded markings를 포함한다. [그림 8-8]
∙White arc – 보통 flap operating range라 불린다. 왜냐하면 하한은 full flap 실속 속도를 나타내고 상한은 maximum flap speed를 나타내기 때문이다. 접근 및 착륙은 보통 white arc 내에서 비행된다.
∙White arc의 하한(VS0) - 착륙 외장에서의 실속 속도. 소형 항공기의 경우 이는 landing configuration(gear와 flaps가 연장된 상태) 및 최대 착륙 무게에서의 무동력실속 속도이다.
∙White arc의 상한(VFE) - flaps가 연장된 상태에서의 최대 속도.
∙Green arc – 항공기의 normal operating range. 대부분의 비행은 이 범위 내에서 이루어진다.
∙Green arc의 하한(VS1) - 특정 외장에서의 실속 속도. 대부분의 항공기에서 이는 clean configuration(gear와 flaps가 접혀진 상태) 및 최대 이륙 무게에서의 무동력 실속 속도이다.
∙Green arc의 상한(VN0) - maximum structural cruising speed. smooth air 상태가 아니라면 이 속도를 초과하지 않는다.
∙Yellow arc – caution range. smooth air에서만 이 범위 내에서 비행할 수 있다(단, 주의할 것).
∙Red line(VNE) - never exceed speed. 이 속도 너머에서는 비행이 금지된다. 왜냐하면 이는 구조적 손상이나 구조적 파괴로 이어질 수 있기 때문이다.
(ATP: VNE는 고도에 의해 변화하지 않으며 항상 동일하다.)
Other Airspeed Limitations
일부 중요한 속도 한계들은 속도계에 표시되어 있지 않다. 허나 placards와AFM/POH에서 이를 확인할 수 있다. 이러한 속도들에는 다음이 포함된다:
∙Design maneuvering speed(VA) - 돌풍이나 조종면의 full deflection으로 인해 structural design’s limit load가 가해졌을 때 구조적 손상이 발생하지 않는 최대 속도. 이 속도를 참조할 때는 무게를 고려해야 한다. 예를 들어 비행기가 무거우면 VA가100노트일 수 있으나비행기가 가벼우면90노트일 수 있다.
∙Landing gear operating speed(VLO) - landing gear를 접거나 연장할 수 있는 최대 속도(단, retractable landing gear를 장비한 항공기의 경우).
∙Landing gear extended speed(VLE) - landing gear가 연장된 상태에서 항공기가 안전하게 비행할 수 있는 최대 속도.
∙Best angle-of-climb speed(VX) - 단위 거리 당 가장 높은 고도를 얻는 속도. 이는 short-field takeoff 도중 장애물 회피를 위해 사용된다.
∙Best rate-of-climb speed(VY) - 단위 시간 당 가장 높은 고도를 얻는 속도.
∙Single-engine best rate-of-climb(VYSE) - 하나의 엔진이 작동하지 않는 다발 항공기가 best rate-of-climb이나minimum rate-of-sink를 얻는 속도. 이 속도는 속도계에 파란색으로 표시되어 있다. VYSE는 보통 “Blue Line”이라 불린다.
∙Minimum control speed(VMC) - 하나의 엔진은 작동하지 않고 남은 엔진은 이륙 추력 상태일 때 다발 항공기가 만족스럽게 제어될 수 있는 최소 비행 속도.
Instrument Check
이륙 전에 속도계는 0을 나타내야 한다. 그러나 강한 바람이 pitot tube에 직접 불어오면 속도계가 0보다 높은 값을 나타낼 수 있다. 이륙 시 속도계가 적절한 rate로 증가하는지 확인한다.
Blockage of the Pitot-static System
계기가 오류를 나타낸다면 pitot tube나 static port(혹은 둘 다)가 막혀있을 가능성이 높다. 수분(얼음 포함), 먼지, 혹은 곤충으로 인해 장치가 막힐 수 있다. 비행 전 점검 도중 pitot tube cover가 벗겨져 있는지 확인한다. 그런 다음 pitot tube의 개구부와 static port의 개구부를 점검한다. pitot tube가 막히면 속도계에 오류를 발생시킨다. 허나 static port가 막히면 속도계, 고도계, 그리고 VSI에 오류를 발생시킨다.
Blocked Pitot System
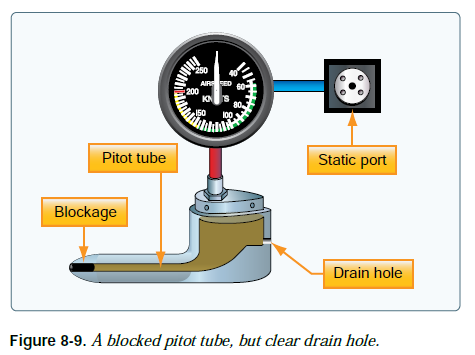
pitot system은 완전히 막히거나 부분적으로 막힐 수 있다. pitot tube는 막혀있으나 drain hole은 막혀있지 않다면 ram air가 더 이상 pitot system에 들어올 수 없다. 시스템 내에 있던 기존의 공기가 drain hole을 통해 빠져나가고 남은 압력이 주변(외부) 공기압으로 떨어진다. 이때 속도계는 점점 0을 지시한다. 왜냐하면 속도계가 ram air pressure와 static air pressure 사이의 차이를 감지하지 못하기 때문이다. pitot tube의 개구부를 통해 동압이 들어오지 못하므로 속도계는 더 이상 작동하지 않는다. pitot drain hole은 여전히 열려 있으므로 diaphragm 내부와 외부의 정압이 동일해진다. 명확한 속도 감소가 즉시 발생하지는 않지만 매우 빠르게 이루어진다. [그림 8-9]
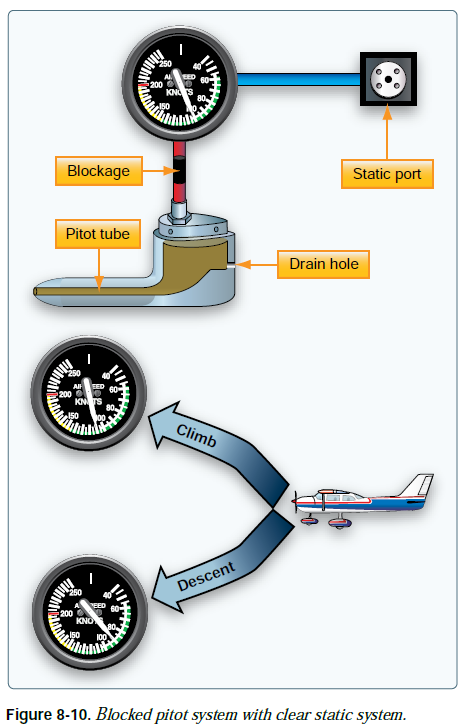
pitot tube의 개구부와 drain hole이 동시에 막히면 pitot tube 내부의 압력이 갇혀버린다. 이때 대기 속도가 증가하거나 감소하여도 속도계에는 변화가 나타나지 않는다. 허나 항공기가 고도를 변경하면 속도계에 변화가 발생한다(단, static port가 막히지 않은 경우). 이러한 변화는 대기속도의 변화가 아닌 정압의 변화와 관련되어 있다. pitot tube의 개구부와 drain hole이 동시에 막혔으므로 pitot tube의 총 압력은 변화하지 않는다. 그러나 정압은 변화할 것이다.
속도계의 지시는 정압과 동압을 모두 사용하기 때문에 이러한 시스템들 중 하나가 막히면 속도계에 영향을 미친다. 속도계에는 diaphragm이 있다. 여기에는 동압이 들어온다. 이 diaphragm의 뒤에는 static ports로부터 들어온 정압이 있다. diaphragm은 이 정압으로부터 압력을 받으며 그 결과로 속도 지시가 변화한다. [그림 8-10]
예를 들어 특정 고도에서 항공기를 0노트로 감속한다. 만약 static port와 pitot tube가 둘 다 막혀있지 않다면 다음과 같은 주장을 할 수 있다:
1. 속도계는 0일 것이다.
2. 동압과 정압은 동일하다.
3. 따라서 증속 시 동압은 두 가지 구성 요소를 가져야 한다: 정압과 동압.
속도계의 지시는 이 두 압력 사이의 관계에 기초해야 한다는 것을 추론할 수 있다. 속도계는 정압을 기준 압력으로 사용한다. 때문에 속도계의 케이스는 이 압력으로 유지된다. 반면 pitot tube를 통해 전달되는 동압은 diaphragm에 연결된다. 고도에 관계없이 항공기의 움직임이 없으면 속도가 0이다. 따라서 pitot tube는 항상 동압과 정압을 함께 제공한다.
즉, 속도계의 지시는 두 가지 압력의 결과이다: 속도계 케이스의 정압이 대해 측정된 diaphragm 내의 정압과 동압.
pitot tube가 막힌 상태로 항공기가 하강하면 diaphragm 내부의 압력이 일정하게 유지된다. 그러나 diaphragm에 대한 정압은 증가하여 diaphragm이 압축된다. 이는 속도 감소를 지시한다. 반대로 항공기가 상승하면 정압이 감소하여 diaphragm이 팽창한다. 이는 속도 증가를 지시한다(ATP: 즉, 속도계는 고도계처럼 작동한다). [그림 8-10]
비행 도중 pitot tube가visible moisture로 인해 막힐 수 있다. visible moisture 내를 비행하기 위해 일부 항공기는 pitot heat을 갖출 수 있다. pitot heat와 관련된 특정 절차는 AFM/POH를 참조한다.
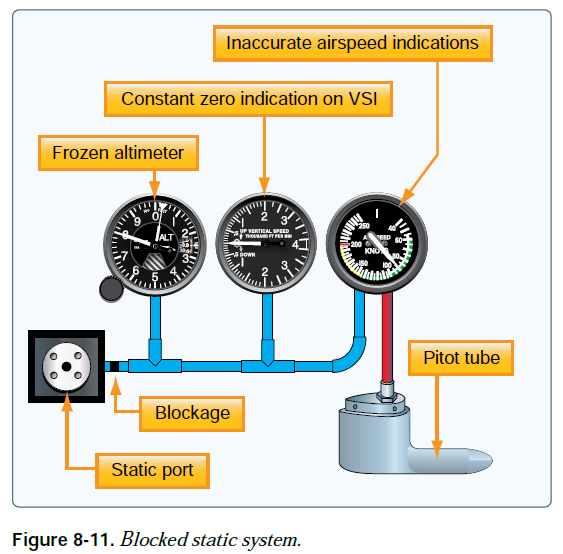
Blocked Static System
static system은 막혔으나pitot tube는 정상 상태라면ASI가 부정확한 지시를 나타낸다.항공기의static ports가 막혀버린 고도보다 높은 고도를 비행하면 속도계가 실제 속도보다 낮은 값을 지시한다.왜냐하면 시스템에 갇혀 있는 정압이 높은 고도에서의 정압에 비해 높기 때문이다. 반대로 static ports가 막혀버린 고도보다 낮은 고도를 비행하면 속도계가 실제 속도보다 높은 값을 지시한다. 왜냐하면 시스템에 갇혀 있는 정압이 낮은 고도에서의 정압에 비해 낮기 때문이다.
항공기가 하강하면 pitot tube의 정압은 증가하여 속도계가 증가한다(단, 이는 항공기가 실제로는 일정한 속도를 유지한다 가정함). pitot tube의 정압 증가는 동압 증가와 동등하다. 왜냐하면 static system의 정압은 변화할 수 없기 때문이다.
static port가 막힌 후 항공기가 상승하기 시작하면 속도가 감소하기 시작한다. pitot tube의 정압은 감소하는 반면 static system의 정압은 일정하게 유지되기 때문이다.
static system이 막히면 altimeter와 VSI에도 영향을 미친다. static system이 막힌 고도에서 고도계가 정지하며 VSI는 계속하여 0을 지시한다. [그림 8-11]
일부 항공기는 조종실 내에 alternate static source를 장비한다. static source가 막혔을 때 alternate static source를 열면 조종실로부터 시스템을 향해 정압이 유입된다. 조종실의 정압은 외부 압력보다 낮다. alternate static pressure를 사용하였다면 속도 보정을 위해 AFM/POH를 참조한다.
기술의 발전은 계기를 변화시켰다. 그 예로 EFD(Electronic Flight Display)가 있으며 이는 보통 “glass cockpits”라 불린다. EFD는 PFD(primary flight displays)와 MFD(multi-function displays)같은 flight displays를 포함한다. 이로 인해 조종사가 사용할 수 있는 정보와 정보가 표시되는 방식이 변화하였다. EFD는 시스템의 신뢰도 향상을 통해 전반적인 안정성을 증가시켰으며 항공기에 최첨단 계기를 장착하는데 드는 전반적 비용을 감소시켰다. 기본 전자 계기들은 아날로그 계기들보다 고장이 덜하다. 항공기 설계자들은 모든 비행계기들을 수용하기 위해 어수선한 패널 레이아웃을 만들 필요가 없어졌다. 대신 multi-panel digital flight displays는 PFD라 불리는 하나의 화면에 모든 계기들을 결합한다. 기존의 “six pack” 계기들은 이제 하나의 LCD 화면에 표시된다.
Airspeed Tape
속도계는 화면의 좌측에 위치하며 vertical speed tape로 표시된다. 속도가 증가하면tape의 상단으로부터 높은 숫자들이 내려온다. TAS가 tape의 하단에 표시된다. TAS는outside air temperature probe로부터 ADC(air data computer)에 입력되는 정보를 통해 계산된다. VX, VY, 그리고 VR을 위한 airspeed marking이 표시된다. 원하는 기준 속도를 설정하기 위한 pilot-controlled airspeed bug도 이용 가능하다. electronic airspeed tape는 flap operating range, normal range, 그리고 caution range를 위한 color-coded range를 표시한다. [그림 8-12] VNE를 넘어서면 maximum speed limitation이 초과되었음을 경고하기 위해 대기속도가 빨간색으로 변경된다.
Attitude Indicator
아날로그 계기에 비해 개선된 점들 중 하나는 EFD의 자세계가 커진 것이다. 인공 수평선은 PFD의 전체 폭에 걸쳐 있다. [그림 8-12] 이는 모든 비행 구간 및 모든 비행 기동 도중 더 나은 시각적 기준을 제공한다. 자세계는 AHRS(Attitude Heading and Reference System)로부터 정보를 수신한다.
Altimeter
고도계는 PFD의 우축에 있다. [그림 8-12] 고도가 증가하면 tape의 상단으로부터 높은 숫자들이 내려온다. 현재 고도는 tape의 중앙에 있는 검은색 박스에 표시된다. 고도는 20ft 단위로 표시된다.
Vertical Speed Indicator(VSI)
VSI는 altimeter tape의 우측에 표시되며이는 arced indicator나vertical speed tape의 형태를 취할 수 있다. [그림 8-12] 두 가지 형태 모두 vertical speed bug를 가진다.
Heading indicator
heading indicator는 인공 수평선의 아래에 위치하며 보통HSI(Horizontal Situation Indicator)를 본떠서 모델링된다. [그림 8-12] heading indicator는 magnetometer로부터 정보를 수신한다. magnetometer는 AHRS에 정보를 공급한 후 이를 PFD에 출력한다.
Turn indicator
turn indicator는 기존의 계기와는 약간 다른 형태를 취한다. sliding bar는 삼각형의 아래에서 왼쪽/오른쪽으로 이동하여 삼타일치로부터의 편차를 나타낸다. [그림 8-12] 삼타일치에 대한 기준은 AHRS에 포함된 accelerometer로부터 나온다.
Tachometer
“six pack”과 관련된 여섯 번째 계기는 보통 tachometer이다. 이는 PFD에 없는 유일한 계기이다. tachomter는 보통 MFD(multi-function display)에 위치한다. 화면 고장이 발생하면 이는 PFD의 계기들과 함께 남은 화면에 표시된다. [그림 8-13]
Slip/Skid Indicator
roll pointer의 아래에 있는 bar가 slip/skid indicator이다. [그림 8-12] 이 bar가 중앙으로부터 bar width 만큼 벗어났다는 것은turn-and-slip indicator의 ball과 마찬가지로 one bar width를 벗어났다는 것이다.
Turn Rate Indicator
turn rate indicator는 보통 compass card의 바로 위에 있다. lubber line의 왼쪽/오른쪽에 있는 tick mark들은 표준율 선회와 반표준율 선회를 나타낸다. 이는 보통 trend line으로 표시되며 만약 trend vector가 두 번째 tick mark까지 연장되었다면 항공기는 표준율 선회 중이다.
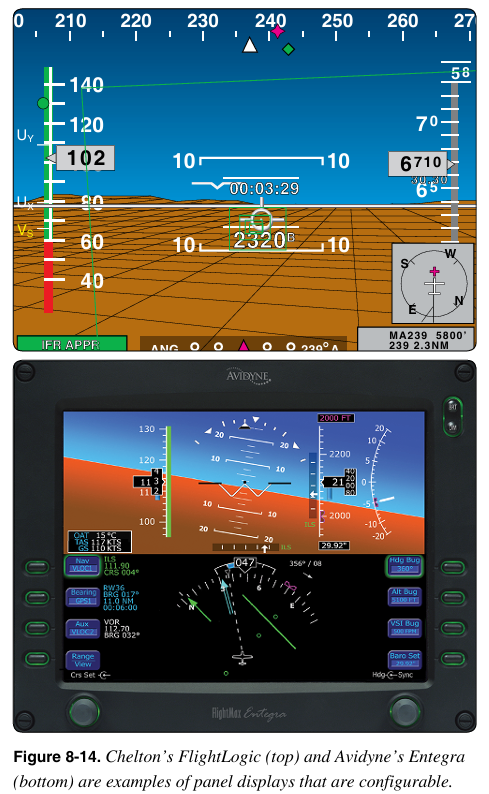
각양각색의 소프트웨어 패키지를 설치해서 다양한 기종에 맞게 각각의 패널 화면을 구성할 수 있다. [그림 8-14] 이와 유사한 방식을 통해 제조업체가 기존 계기 화면을 업그레이드 할 수도 있으며이는 각 계기들을 교체할 필요성을 없애준다.
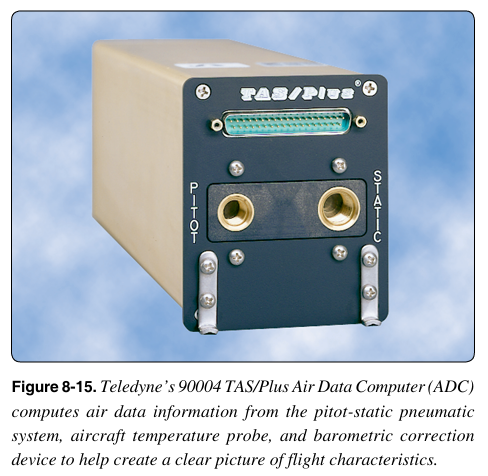
Air Data Computer(ADC)
EFD는 종래의 아날로그 계기들과 동일한 유형의 계기 정보를 사용하지만 그 처리 시스템은 다르다. ADC는 pitot static 정보를 수신한다. ADC는 총 압력과 정압의 차이를 계산한 다음PFD에 속도를 표시하는데 필요한 정보를 생산한다. 또한 외부 공기 온도가 모니터링 되며 이는 시스템 내의 다양한 구성 요소로 전송된다. PFD 화면은 외부 공기 온도를 표시한다. [그림 8-15]
ADC는 PFD 뿐만 아니라 autopilot control system에도 정보를 제공할 수 있는 반도체 장치이다.ADC는 신속하게 제거 및 교체될 수 있으며 이 덕분에 타운타임이 단축될 수 있다.
고도 정보는 static pressure port로부터 얻는다. 허나 정압은 diaphragm에 들어가지 않는다. 대신 ADC가 기압을 계산한 다음 디지털 신호를 PFD로 전송해서 올바른 고도를 표시한다. EFD는 trend vectors도 표시한다. trend vectors는 고도와 속도의 진행 상황을 보여준다.
Trend Vectors
trend vectors란 속도계와 고도계에서 위/아래로 움직이는 자홍색 선이다. [그림 8-16 및 17] ADC는 변화율을 계산한 다음 6초 후의 예상 속도와 예상 고도를 표시한다. 조종사는 trend vectors를 통해 항공기의 자세를 더 제대로 제어할 수 있다. 계기 scan에 trend vectors를 포함시키면 조종사는 속도와 고도를 더욱 정밀하게 제어할 수 있다. 자세한 정보는 IFH나 특정 항전 장비 제조업체 교육 자료를 참조하라.
몇몇 비행계기들은 자이로스코프의 특성을 통해 구동된다. 자이로스코프를 갖춘 계기는 보통 turn coordinator, heading indicator, 그리고 attitude indicator이다. 이러한 계기들의 작동 방법을 이해하려면 계기의 동력원, 자이로의 원리, 그리고 각 계기의 작동 원리에 대해 알아야 한다.
Gyroscopic Principles
회전하는 모든 물체는 자이로스코프의 특성을 보인다. 이러한 특성을 활용하도록 설계 및 장착된 바퀴나 로터를 자이로스코프라 부른다. 계기 자이로의 두 가지 설계 특징은 다음과 같다: 크기에 비해 무겁다(밀도가 크다), 그리고 회전 속도가 높다.
자이로스코프를 장착하는 방식에는 보통 두 가지 유형이 있다. 어떤 자이로 특성을 활용하는지에 따라 자이로스코프 장착 방식이 달라진다. freely(혹은 universally) mounted gyroscope는 무게 중심을 기준으로 어느 방향으로든 자유롭게 회전할 수 있다. 이러한 자이로의 바퀴는 세 개의 자유 평면을 가지고 있다 간주된다. 바퀴는base에 대해 어느 평면에서든 자유롭게 회전할 수 있으며 바퀴가 정지한 상태에서는 원래의 위치에 머물도록 균형이 맞춰져 있다. restricted(혹은 semi-rigidly) mounted gyroscopes는 자유면 중 하나가 base에 대해 고정된 자이로스코프이다.
자이로스코프는 두 가지 기본 특성을 가진다: 공간강성(rigidity in space)과 세차(precession).
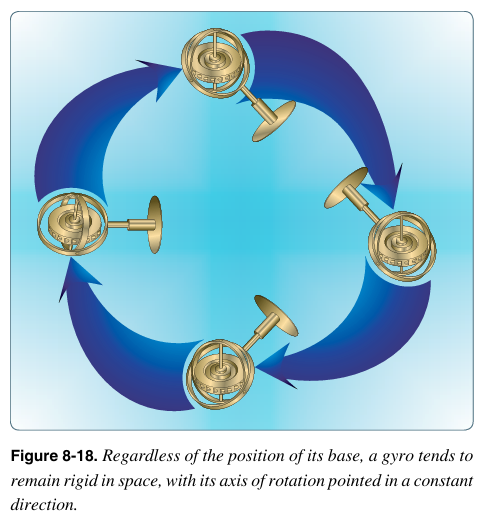
Rigidity in Space
공간강성이란 자이로스코프가 그 회전면에서 고정된 위치를 유지하는 원리를 말한다. 공간강성의 한 예시는 자전거 바퀴에 있다. 자전거 바퀴의 속도가 증가하면 자전거 바퀴는 그 회전면에서 더 안정적이게 된다. 이는 자전거가 저속에서는 불안정하지만 조종이 쉬운, 그리고 고속에서는 안정적이지만 조종이 어려운 이유이다.
이 바퀴를gimbal rings에 장착하면 자이로는 어느 방향으로든 자유롭게 회전할 수 있다. 따라서 gimbal rings가 기울어지거나, 비틀어지거나, 혹은 달리 움직여도 자이로는 원래 회전하던 평면에 남아 있다. [그림 8-18]
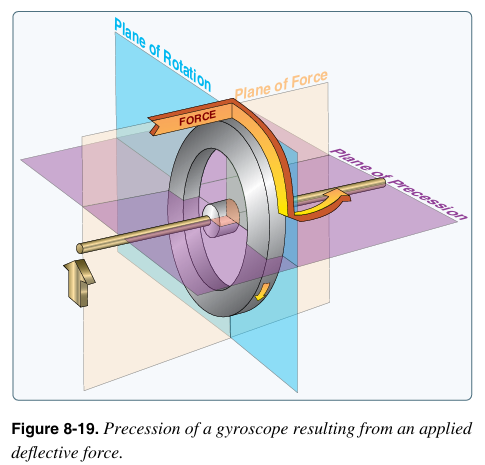
Precession
세차란 deflective force에 반응해서 자이로가 기울어지거나 회전하는 것을 말한다. 이 힘에 대한 반응은 힘이 작용한 지점에서 발생하지 않으며 대신 이는 회전 방향으로부터 90도 너머에서 발생한다. 이 원리를 통해 자이로는 방향 변화에 의해 생성되는 압력의 양을 감지해서 선회율을 결정할 수 있다. 자이로가 precess 하는 비율은 바퀴 속도에 반비례하고 deflective force에 비례한다.
자전거 바퀴에 작용하는 세차는 자전거가 선회할 수 있게 해준다. 정상 속도로 주행하는 도중 원하는 방향으로 핸들을 돌릴 필요가 없다. 라이더는 단순히 원하는 방향으로 몸을 기울인다. 자전거의 오른쪽에서 바라보았을 때 바퀴는 시계방향으로 회전한다. 따라서 라이더가 몸을 왼쪽으로 기울이면 바퀴의 윗부분에서 왼쪽으로 힘이 가해진다. 이 힘은 회전 방향으로부터 90도 너머에서 작용하여 타이어의 앞부분에 힘을 가해 자전거를 왼쪽으로 움직이게 만든다. 저속에서는 자이로가 천천히 회전해서 불안정하므로 핸들을 회전시켜야 선회율이 높아진다.
세차는 일부 계기에서 몇 가지 사소한 오류를 발생시킬 수 있다. [그림 8-19] 베어링 마찰과 같은 외부 요인으로 인해 세차가 발생하면 자이로가 회전면으로부터 벗어날 수 있다.특정 계기들은(예를 들어heading indicator) 비행 도중 재설정 되어야 할 수 있다.
Sources of Power
일부 항공기에서는 모든 자이로가 진공/압력, 혹은 전기로 작동한다. 그 외의 항공기에서는 진공/압력 시스템이 heading indicators와 attitude indicators에 전원을 제공하고 전기 시스템이 turn coordinator에 전원을 공급한다. 대부분의 항공기는 최소 두 가지의 전원을 갖추며 이는 하나의 전원에 이상이 발생하였을 때 적어도 하나의 bank 정보를 이용할 수 있게 만들기 위함이다. 진공/압력 시스템은 로터를 고속으로 회전시키기 위해 rotor vanes에 공기 흐름을 끌어와서 자이로를 회전시킨다. 계기가 작동하는데 필요한 진공/압력은 각기 다르지만 이는 보통 4.5"Hg ~ 5.5"Hg이다.
자이로의 진공 공급원 중 하나는 vane-type engine-driven pump이며이는 엔진의 accessory case에 장착되어 있다. 펌프의 생산 능력은 자이로의 수에 따라 항공기마다 다르다.
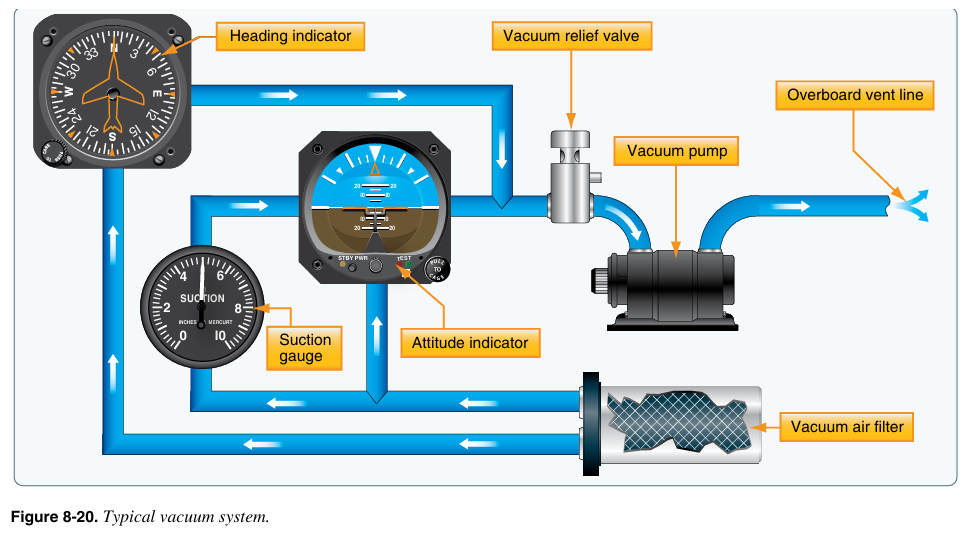
전형적인 진공 시스템은 engine-driven vacuum pump, relief valve, air filter, gauge, 그리고 tubing으로 구성된다. gauge는 항공기의 계기판에 장착되며이는 시스템 내 압력의 양을 나타낸다(진공은 인치 단위로 표시되며 주변 압력보다 낮게 측정된다).
engine-driven vacuum pump를 통해 공기가 진공 시스템 내로 들어온다. [그림 8-20] 공기는 먼저 필터를 통과한다. 여기서 진공/압력 시스템으로 이물질이 들어가는 것이 방지된다. 공기는 attitude indicators와 heading indicators로 이동하여 자이로를 회전시킨다. relief valve는 진공 압력/흡입 압력이 한계를 초과하는 것을 방지한다. 이후 공기는 바깥으로 배출되거나 그 외 시스템에서 사용된다(예를 들어pneumatic deicing boots를 팽창시키는데 사용됨) .
비행 도중 진공 압력을 모니터링 하는 것이 중요하다. 왜냐하면 흡입 압력이 낮을 경우 attitude indicator와 heading indicator가 정확한 정보를 제공하지 못할 수 있기 때문이다. vacuum/suction gauge는 보통 normal range를 나타내도록 표시된다. 일부 항공기는 warning light를 장비하며이는 진공 압력이 허용 수준 아래로 떨어졌을 때 켜진다.
진공 압력이 정상 운영 범위아래로 떨어지면 자이로 계기가 불안정해지고 부정확해질 수 있다. 계기들을 규칙적으로 교차 점검하는 것이 좋다.
Turn Indicators
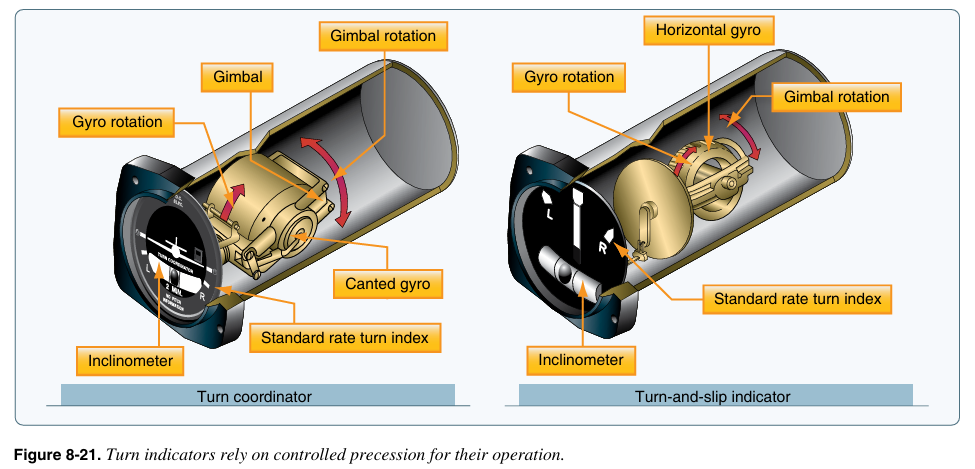
항공기는 두 가지 유형의 turn indicators를 사용한다: turn-and-slip indicators와 turn coordinators. 자이로가 장착되는 방식으로 인해 turn-and-slip indicator는 초당 선회율만을 나타낸다. turn coordinator의 경우에는 자이로가 비스듬히(canted) 장착되기 때문에 초기에 roll rate도 나타낼 수 있다. roll이 안정되면 turn coordinator는 선회율을 나타낸다. 두 계기는 모두 선회 방향과 삼타일치 여부를 나타내며자세계가 고장 났을 때에는 bank 정보의 백업 역할을 한다. 삼타일치는 inclinometer를 통해 달성된다. inclinometer란 액체가 채워진 곡선 튜브로 그 내부에는 ball이 있다. [그림 8-21]
Turn-and-Slip Indicator
turn-and-slip indicator의 자이로는 항공기의 세로축에 해당하는 수직면에서 회전한다. single gimbal은 자이로가 기울어질 수 있는 평면을 제한하며 스프링은 중심 위치가 유지되도록 작동한다. 세차로 인해yawing force는 자이로를 왼쪽이나 오른쪽으로 기울어지게 만든다. turn-and-slip indicator는 turn needle이라 불리는 지시침을 통해 선회 방향과 선회율을 나타낸다. turn-and-slip indicator는 restraining springs 덕분에 회전축으로부터 “tumbling” off 할 수 없다. 자이로에 극심한 힘이 가해지면 자이로가 정상 회전면으로부터 벗어나며 이로 인해계기의 지시가 유효하지 않게 된다. 특정 계기들은 자이로가 tumble하게 되는 특정 pitch limit와bank limit을 가진다.
Turn Coordinator
turn coordinator의 gimbal은 비스듬히 장착되어 있다. 따라서 turn coordinator의 자이로는 rate of roll과 rate of turn을 모두 감지할 수 있다. 훈련 항공기에서는 turn coordinators가 더 일반적으로 사용되므로 이 논의은 해당 계기에 집중된다. roll in이나roll out을 수행하면 miniature aircraft가 항공기의 roll 방향으로 기울어진다. roll rate가 빠르면 빠를수록miniature aircraft가 더 가파르게 기울어진다.
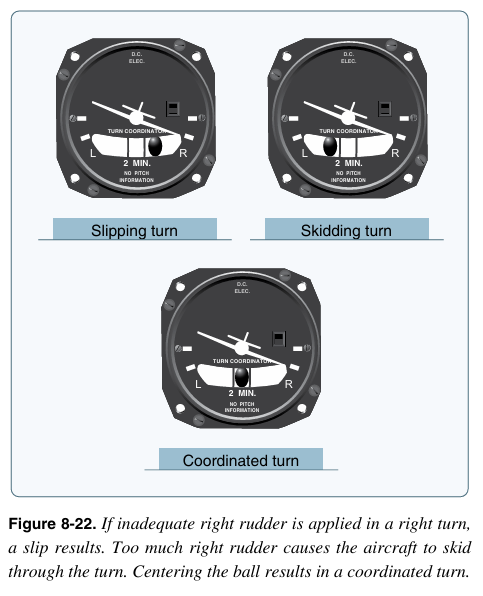
표준율 선회를 설정 및 유지하기 위해 turn coordinator를 사용할 수 있다. miniature aircraft의 날개를 turn index에 정렬하면 표준율 선회가 설정된다. 그림 8-22는 turn coordinator를 보여준다. 계기의 왼쪽과 오른쪽에는 두 개의 마킹이 있다. 첫 번째 마킹은 날개 수평(선회율 0)을 참조하기 위해 사용된다. 왼쪽과 오른쪽의 두 번째 마킹은 표준율 선회를 나타낸다. 표준율 선회는 초당 3도의 선회율로 정의된다. turn coordinator는 선회율과 선회 방향만을 나타내지 구체적인bank angle은 나타내지 않는다.
Inclinometer
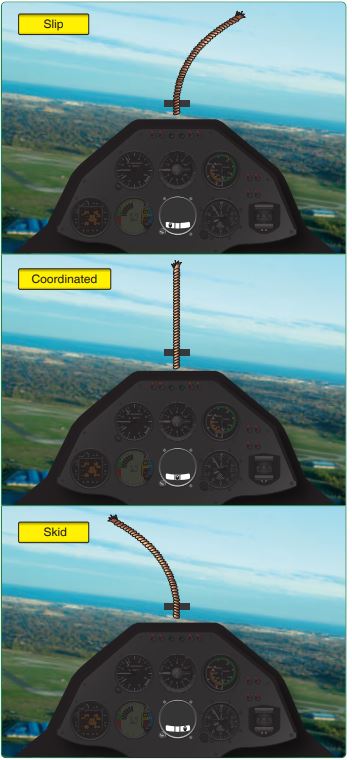
inclinometer는 항공기의 yaw(항공기 기수의 왼쪽/오른쪽 움직임)를 나타내기 위해 사용된다. 삼타일치 직진수평비행 도중 중력은 ball을 튜브의 가장 낮은 부분(reference lines의 중심)에 놓이게 한다. ball을 중심으로 유지함으로써 삼타일치 비행이 유지된다. ball이 중앙에 있지 않다면 rudder를 통해 ball을 중앙으로 되돌려놓을 수 있다.
ball을 중앙으로 되돌려놓기 위해 ball이 편향된 방향으로 rudder를 가한다. 어느 rudder를 밟을지 기억하기 위해 “step on the ball”이라는 간단한 규칙을 사용한다. 선회 도중 aileron과 rudder가 삼타일치 되어 있다면 ball은 튜브의 중앙을 유지한다. 만약 공기역학적 힘이 불균형하다면 ball이 튜브의 중앙으로부터 멀어진다. slip이란bank angle에 비해 선회율이 낮아서 ball이 선회의 안쪽으로 이동하는 것이다. [그림 8-22] skid란bank angle에 비해 선회율이 높아서 ball이 선회의 바깥으로 이동하는 것이다. 이러한 상황들을 수정하기 위해, 그리고 선회의 품질을 향상시키기 위해 “step on the ball”을 기억하라. slip/skid를 수정하기 위해 bank angle을 변화시키는 것도 도움이 될 수 있다. slip을 수정하기 위해선 bank를 감소시키거나 및/혹은 선회율을 증가시킨다. skid를 수정하기 위해선 bank를 증가시키거나 및/혹은 선회율을 감소시킨다.
Yaw String
항공기에 추가될 수 있는 하나의 추가 장치는 yaw string이다. yaw string이란wind screen의 중앙에 부착된 끈이나 실이다. 삼타일치 비행 도중 string은 wind screen의 위쪽으로 곧장 향한다. 항공기가 slip이나 skid를 수행하고 있다면slip/skid 방향에 따라 yaw string이 왼쪽이나 오른쪽으로 이동한다.
(출처: Wikipedia)
Instrument Check
비행 전 점검 도중 inclinometer가 용액으로 가득 차 있으며 기포가 없는지 확인한다. 또한 ball은 가장 낮은 지점에 위치해야 한다. 지상 활주 도중 turn coordinator가 올바른 선회 방향을 표시해야 하며반면 ball은 선회 반대 방향으로 움직여야 한다.
Attitude Indicator
자세계는 miniature aircraft와 horizon bar를 통해 항공기의 자세를 보여준다. miniature aircraft와 horizon bar 사이의 관계는 실제 항공기와 실제 수평선 사이의 관계와 같다. 이 계기는 아주 작은 자세 변화도 즉시 알려준다.
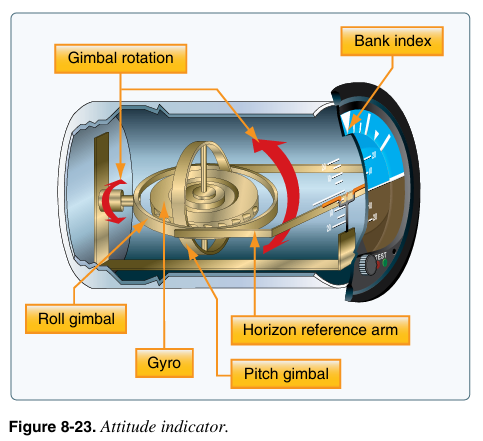
자세계의 자이로는 수평면에 장착되며이는 작동을 위해 공간강성을 사용한다. horizon bar는 실제 수평선을 나타낸다. 이 bar는 자이로에 고정되어 있어서 항공기가 가로축이나 세로축을 중심으로 pitch/bank 할 때 수평면을 유지한다. 이 덕분에 자세계는 실제 수평선을 기준으로 항공기의 자세를 나타낸다. [그림 8-23]
자이로는 수평면에서 회전하며 회전 경로로부터 벗어나는 것에 저항한다. 자이로의 공간강성 특성 때문에 사실 항공기가 자이로 주위를 회전한다.
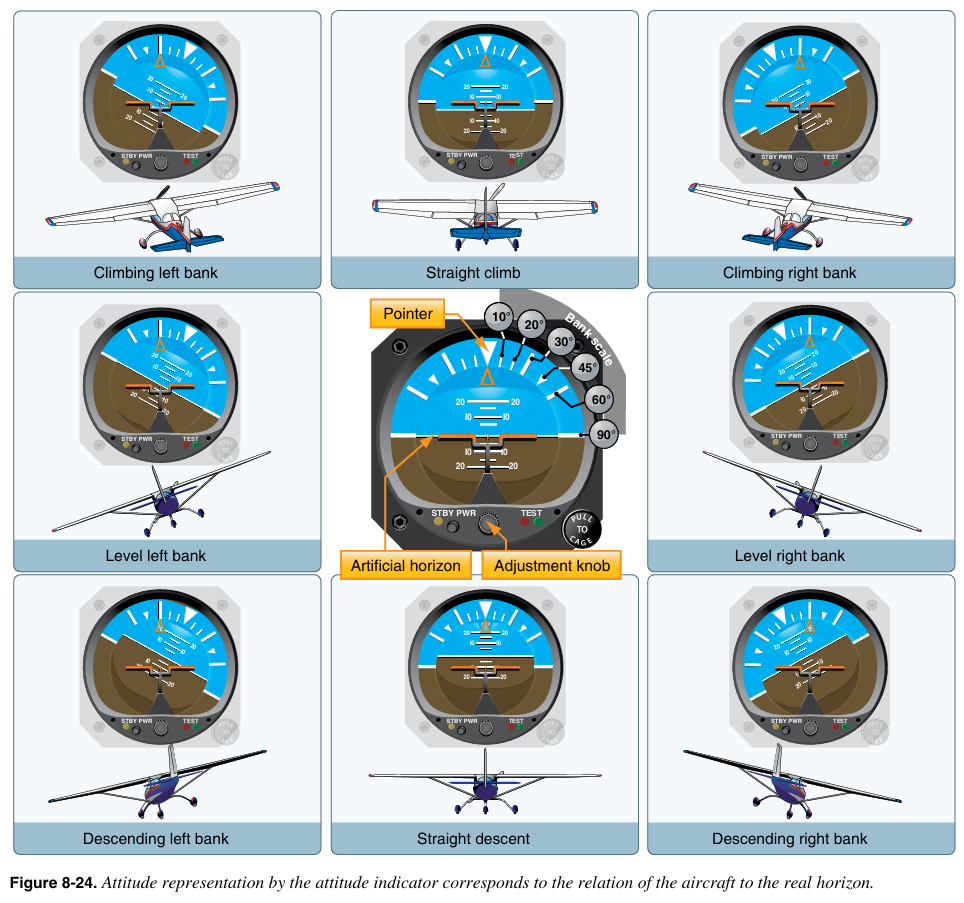
조종사가 miniature aircraft를 위/아래로 움직일 수 있도록 adjustment knob가 제공되며이를 통해 조종사는 본인의 시야에 맞게 miniature aircraft를horizon bar와 정렬시킬 수 있다. 보통 miniature aircraft는 직진수평 순항 비행 중일 때 horizon bar와 겹쳐지도록 조정된다.
자세계의 pitch 한계와 bank 한계는 계기에 따라 달라진다. 일부 자세계들은 100 ~ 110도의 bank 한계와60 ~ 70도의 pitch 한계를 가진다. ±25도의 pitch 정보만을 표시하는 자세계에서 이 한계가 초과되었다면 (1) pitch가 더 이상 이 한계를 초과하지 않을 때까지 ±25도의pitch가 표시되거나 (2) 계기가 "tumble" 하여 잘못된 pitch와 bank가 표시될 수 있다. 항공기가 IMC를 운영 중이거나 조종사가 unusual attitude recovery를 수행 중이라면 이는 매우 위험할 수 있다. 대다수의 최신 자세계에는 이러한 문제가 없다.
모든 조종사는 banking scale을 해석할 수 있어야 한다. [그림 8-24] 계기 상단에 위치한 banking scale indicators는보통 항공기가 실제로 기울어진 방향으로 움직인다. 허나 일부 모델에서는 항공기가 실제로 기울어진 방향의 반대쪽으로 움직인다. 만약 bank 방향을 결정하기 위해 bank indicator를 사용한다면 조종사가 혼란스러울 수 있다. banking scale은 bank angle의 양을 제어하기 위해서만 사용해야 한다. bank 방향을 확인하기 위해선 miniature aircraft와 horizon bar의 관계를 사용해야 한다. 자세계는 신뢰도가 높은 계기이며 계기판에서 가장 현실적인 계기이다. 자세계의 지시는 항공기의 실제 자세와 매우 유사하다.
(B737의 PFD. 항공기는 현재 좌선회 중이다.)
Heading Indicator
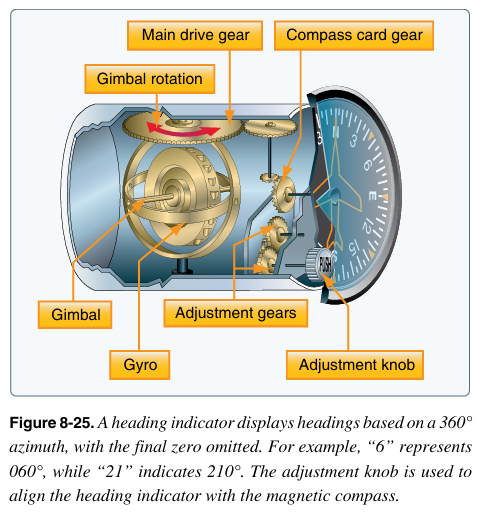
heading indicator는 나침반의 사용 방법을 용이하게 만들기 위해 설계된 기계식 계기이다. 나침반에는 오류가 매우 많아서 직진비행과 선회를 어렵게 만든다(특히 난기류 조건인 경우). 허나 heading indicator는 나침반 오류들의 영향을 받지 않는다. [그림 8-25]
heading indicator는 공간강성의 원리를 사용한다. 자이로의 로터는 수직면에서 회전하며compass card가 로터와 연결된다. 로터는 공간강성을 유지하므로 compass card의 각 지점들은 자이로의 수직면을 기준으로 우주에서 동일한 위치를 유지한다. 항공기가 자이로 주위를 회전하는 것이지 자이로가 항공기 주위를 회전하는 것이 아니다. 항공기와 계기 케이스가 자이로의 수직축을 중심으로 회전하기 때문에 card는 정확한 heading 정보를 제공한다.
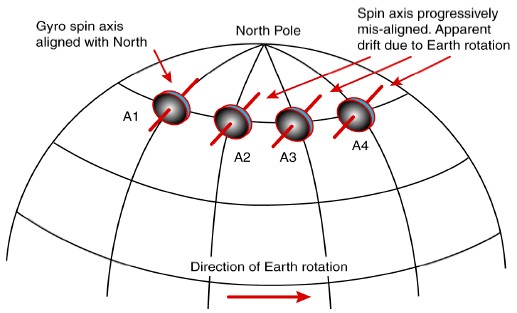
마찰로 인한 세차 때문에 heading indicator가 초기 설정으로부터 조금씩 drift 한다. drift의 양은 계기의 상태에 따라 크게 달라진다. 베어링이 마모되거나, 더럽거나, 혹은 부적절하게 윤활되면 drift가 과도할 수 있다. heading indicator의 또 다른 오류는 지구가 한 시간마다 15도의 속도로 자전하기 때문에 발생한다. 따라서 마찰로 인한 세차를 배제한다 해도 heading indicator는 한 시간마다 15도의 오차를 나타낼 수 있다.
(apparent drift)
HSI(horizontal situation indicators)라 불리는 일부 heading indicators는 magnetic slaving transmitter로부터 자북 정보를 수신하므로 보통 조정을 필요로 하지 않는다. magnetic slaving transmitter는 magnetometer라 불린다.
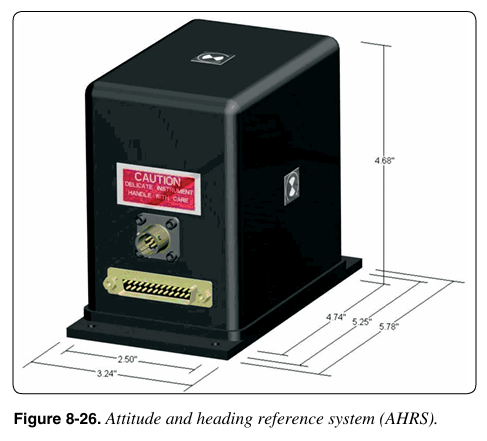
Attitude and Heading Reference System(AHRS)
EFD는 자이로를 반도체 레이저 시스템으로 대체하였다. 이 시스템은 어느 자세에서도 계기가 tumbling 하지 않게 해준다. 이 기능은 AHRS의 개발 결과이다.
AHRS는 자세계의 pitch/bank 정보를 생성하기 위해 PFD에 자세 정보를 전송한다. heading 정보는 magnetometer(자력계 - 지구의 자기력선을 감지하는 장치)에서 생성된다. heading 정보는 처리된 다음 PFD로 전송되어 heading display를 생성한다. [그림 8-26]
The Flux Gate Compass System
지구 자기력선은 두 가지 기본적인 특정을 가진다: 자석은 자기력선과 연장된다, 그리고 자기력선을 가로지르는 어떠한 전선에도 전류가 유도된다.
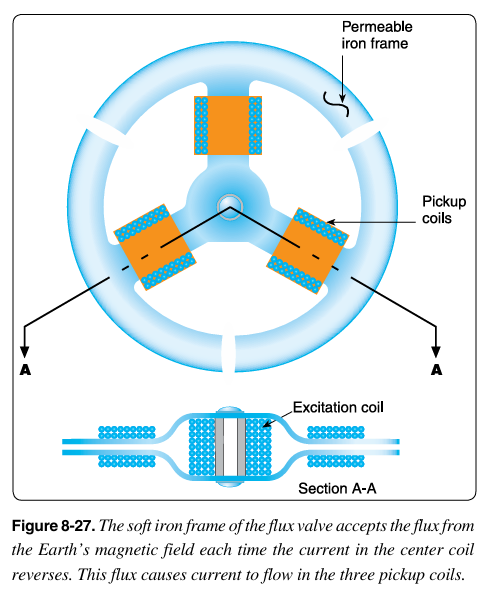
slaved gyro를 구동하는 flux gate compass는 전류가 유도되는 특성을 사용한다. flux valve는 아래의 그림처럼 고리가 분리된 모양이다. [그림 8-27] 이는 연철로 이루어져 있으므로 자기력선을 쉽게 받아들일 수 있다. 지구 자기장 덕분에 이 고리에 유도된 전류를 받아들이기 위해 전기 코일이 세 개의 leg에 각각 감겨있다. 프레임 중앙의 iron spacer에 감긴 코일에는 400Hz의 교류(A.C.)가 흐른다. 전류가 최대 지점에 도달하면(한 주기 당 두 번) 코일에 의해 생성되는 자력이 너무 많아져서프레임이 지구 자기장의 자기력선을 받아들일 수 없게된다.
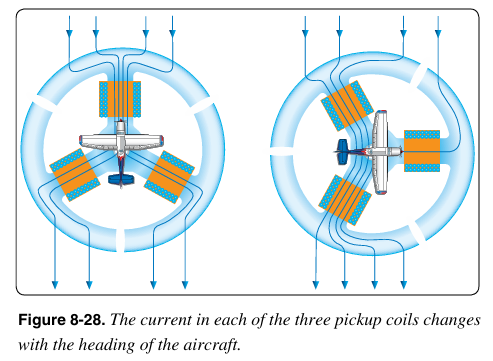
허나 전류는 최대 지점에 도달할 때마다 반대 방향으로 흘러서 프레임의 자성을 없애며이 덕분에 프레임은 지구 자기장의 자기력선을 받아들일 수 있다. 자기력선이 코일을 가로지르면 코일 내에 전류가 흐른다. 이 세 개의 코일은 항공기의 heading 변화에 따라 코일 내에 흐르는 전류가 변하는 방식으로 연결된다. [그림 8-28]
이 세 개의 코일은 계기 케이스 내부의 synchro와 연결된다. synchro는 RMI(radio magnetic indicator)나HSI(horizontal situation indicator)의 다이얼을 회전시킨다.
Remote Indicating Compass
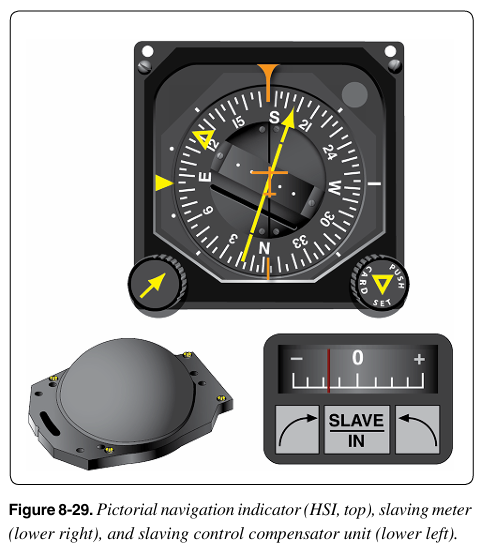
오래된 유형의 heading indicators에서 발생하는 오류와 한계를 보완하기 위해 remote indicating compass가 개발되었다. 이 시스템은 보통 두 가지로 구성된다: pictorial navigation indicator와slaving control and compensator unit. [그림 8-29] pictorial navigation indicator는 보통 HSI라 불린다.
slaving control and compensator에는 “slaved gyro”나“free gyro” 모드를 선택할 수 있는 버튼이 있다. 또한 이 장치에는 slaving meter와 두 개의 manual heading-drive 버튼이 있다. slaving meter는 현재 계기에 표시되는 heading과 실제 자북의 차이를 나타낸다. slaving meter가 오른쪽으로 편향되었다면compass card에 시계방향 오류가 존재한다는 것이고 왼쪽으로 편항되었다면 반시계방향 오류가 존재한다는 것이다. 항공기가 선회를 수행해서 card가 회전할 때마다 slaving meter는 한 쪽 방향으로 full deflection을 표시한다. 시스템이 “free gyro” 모드에 있을 때에는 적절한 heading-drive 버튼을 눌러서 compass card를 조정할 수 있다.
별도의 장치인 magnetic slaving transmitter는 멀리 장착된다(자기 간섭의 가능성을 방지하기 위해 보통 wingtip에 장착됨). magnetic slaving transmitter는 flux valve(이 시스템의 방향 감지 장치)를 가지고 있다. 자기력선은 증폭된 후 heading indicator unit로 전달되는 신호가 된다. 이 신호는 heading indicator의 토크 모터를 작동시켜서 자이로가transmitter 신호와 정렬되도록 만든다. magnetic slaving transmitter는 HSI와 전기적으로 연결된다.
remote indicating compass에는 여러 가지 종류가 있으므로 시스템의 기본적인 특징만이 여기서 다루어진다. 계기 조종사는 본인의 항공기에 설치된 장비의 특성을 숙지해야 한다.
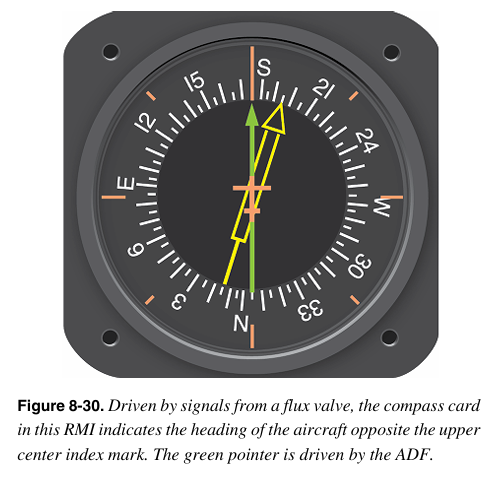
계기판은 점점 복잡해지고 조종실 업무량은 많아져서 조종사가 이용 가능한 계기 스캐닝시간이 줄어들었다. 때문에 계기 제조업체들은 계기들을 결합하기 위하여 노력하였다. 이에 대한 한 가지 좋은 예시는 RMI이다. [그림 8-30] 여기서 compass card는 flux valve에 의해 작동하며 두 개의 지시침은 ADF(automatic direction finder)와 VOR(very high frequency omnidirectional range)에 의해 작동한다.
자동으로 북쪽을 탐지하는 기능이 없는 heading indicators를 “free” gyros라 부르며 해당 계기는 주기적인 조정을 필요로 한다. 대략 15분마다 계기의 지시를 확인한 다음heading indicator를 magnetic compass와 정렬하는 것이 중요하다. 나침반 오류를 방지하기 위해 항공기가 일정한 속도로 직진비행을 유지하고 있을 때 heading indicator를 magnetic compass와정렬한다.
heading indicator의 bank 한계와pitch 한계는 계기에 따라 달라진다. 소형 항공기에서 발견되는 일부 heading indicators는 대략 55도의 pitch 한계와55도의 bank 한계를 가진다. 이러한 한계들 중 하나가 초과되면 계기가 “tumbles(=spills)” 하며계기가 리셋되기 전까지는 올바른 지시를 얻을 수 없다. 계기가 tumble한 후 caging knob를 통해 계기를 리셋할 있다. 대부분의 현대 계기들은 tumble 하지 않도록 설계된다.
자이로가 충분히 빠르게 회전하지 못하는 경우에는 추가적인 세차 오류가 발생할 수 있다. 진공 시스템의 흡입력이 충분하지 못하면 heading indicator와 attitude indicator의 자이로가 느려지기 시작한다. 회전 속도가 느려질수록 자이로는 회전면으로부터 벗어나기 더 쉬워진다. 일부 항공기에서는 low vacuum이 발생하였음을 나타내기 위해 warning lights를 가지고 있다. 허나 그 외의 항공기에서는 vacuum gauge만 있을 수 있다.
Instrument Check
자이가 spool up 할 때 비정상적인 소리가 나는지 확인한다. 지상 활주 도중 계기가 올바른 방향으로 선회를 지시해야 하며 세차가 정상적이어야 한다. 진공 시스템을 사용하는 자이로 계기는 idle power에서 충분한 속도에 도달하지 못할 수 있으며 비행중일 때보다 세차가 더 빠르게 발생할 수 있다.
AOA indicator의 목적은 에어포일의 공기역학적 상태와 관련된 조종사의 상황 인식을 개선시키는 것이다.이를stall margin awareness라고도 부른다. 간단히 말해 현재 에어포일의 받음각과 임계 받음각 사이에 존재하는 여유를 인지하는 것이다.
속도는 실속을 방지하기 위해 신뢰할 수 있는 매개변수가 아니다. 비행기는 어떤 속도에서도 실속에 빠질 수 있다. 대신 받음각은 실속을 방지하기 위해 사용할 수 있는 더 나은 매개변수이다. 특정 외장에서 비행기는 항상 같은 받음각(즉, 임계 받음각)에서 실속에 빠진다. 이러한 임계 받음각은 다음에 의해 변화하지 않는다:
∙ 무게
∙ bank angle
∙ 온도
∙ 밀도 고도
∙ 무게 중심
AOA indicator가 범용 항공 항공기에 설치되면 여러 가지 이점을 얻을 수 있는데 그 중 가장 중요한 것은 상황 인식이 개선되는 것이다. AOA indicator가 없다면 받음각은 조종사에게 있어 “보이지 않는 것”이다. 이 장치는 여러 매개변수를 동시에 측정한 다음 현재의 받음각을 결정한다. 그리고 조종사에게 현재의 받음각을 임계 받음각에 대한 근접도와 함께 시각적 이미지로 제공한다. [그림 8-31] 이 장치는 비행기의 에너지 관리 상태를 시각적으로 표시할 수 있다. 비행기의 에너지 상태란 속도, 고도, 항력, 그리고 추력 사이의 균형을 의미하며이는 에어포일이 얼마나 효율적으로 작동하는지를 나타낸다.
지구는 자기장으로 둘러싸인 거대한 자석이다. 자기장은 자기력선으로 이루어져 있으며 이러한 자기력선들은 자북에서 자남으로 들어간다.
자기력선은 두 가지 중요한 특성은 가진다: 자유롭게 회전하는 모든 자석은 자기력선에 연장됨, 자기력선을 가로지르는 모든 전도체에는 전류가 유도됨. 항공기에 설치된 대부분의 direction indicators는 이 두 가지 특성 중 하나를 사용한다.
Magnetic Compass
방향을 지시하는 가장 오래되고 간단한 계기들 중 하나는 자기 나침반이다. 나침반은 VFR 비행과IFR 비행에 필요한 기본 계기이다(14 CFR part 91).
Magnetic Compass Overview
자석이란 보통 철을 포함하는 금속이며 이는 자기력선을 끌어당긴다. 모든 자석들은 그 크기와 상관없이 두 개의 극을 가진다: 북극과 남극. 하나의 자석이 다른 자석의 자기장에 놓이면 서로 다른 극들은 서로를 끌어당기고 서로 같은 극들은 서로를 밀어낸다.
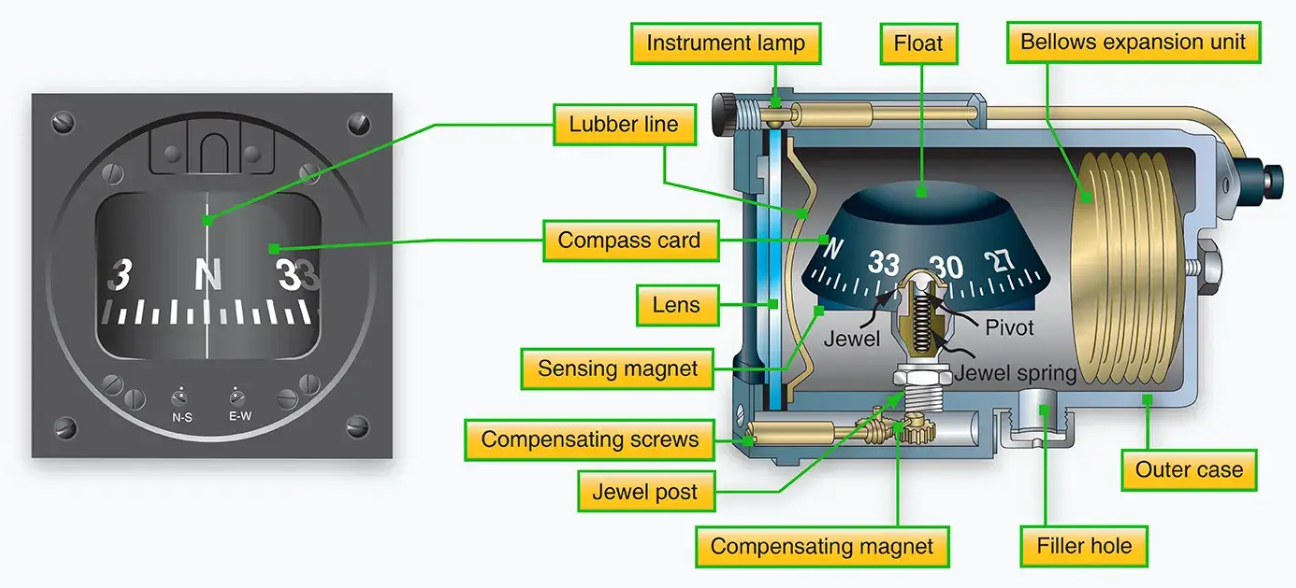
항공기 자기 나침반 안에는 두 개의 작은 자석이 있으며 이들은metal float에 부착된다. metal float는 투명한 나침반 액체(등유와 비슷함)가 담긴 그릇 안에 밀봉된다. [그림 8-32] card라 불리는 눈금이 float를 감싸며이를 계기의 lubber line을 통해 확인할 수 있다. card에는 기본 방위(north, east, south, west)를 나타내는 문자들과30도 간격의 숫자들이 표시된다. 숫자들의 마지막 “0”은 생략된다: 예를 들어 3=30도이고, 6=60도이며, 33=330도이다. 문자와 숫자 사이에는 긴 눈금과 짧은 눈금이 있다. 긴 눈금은 10도를 나타내며 짧은 눈금은 5도를 나타낸다.
(출처: Aeronautics Guide)
float and card assembly의 중앙에는 pivot이 있는데이는 스프링이 장착된 jewel cup 내에서 작동한다. flot의 부력으로 인해 pivot에 가해지는 무게는 거의 없으며 나침반 액체가 float와 card의 진동을 감쇠시킨다. 이러한 jewel-and-pivot 설계를 통해 float가 자유롭게 회전할 수 있으며 대략 18도의 bank angle까지 기울여질 수 있다. 더 깊은 bank angle에서는 나침반 지시가 불규칙해진다.
compass housing은 나침반 용액으로 가득 차 있다. 온도 변화로 인해 용액이 팽창 및 수축하여 나침반이 손상되는 것을 방지하기 위해 나침반 뒷면이 flexible diaphragm이나metal bellows로밀봉된다.
자석은 지구 자기장과 정렬되며 조종사는 lubber line을 통해 방향을 읽는다. 조종사는 compass card의 뒤편에서 compass card를 바라보고 있다는 것을 주의하라. 조종사가 북쪽을 향하여 비행할 때 동쪽은 조종사의 오른쪽이다. 허나 card의 “33”은 "N"의 오른쪽에 있다. 왜냐하면 card는 가만히 있으나 compass housing과 조종사가 card를 중심으로 회전하기 때문이다. 이러한 구조 때문에 나침반은 읽기에 헷갈릴 수 있다.
Magnetic Compass Induced Errors
자기 나침반은 계기판에서 가장 간단한 계기이지만 많은 오류를 가진다: Variation, Deviation, Dip errors, Northerly Turning Errors, Southerly Turning Errors, Acceleration Error, 그리고 Oscillation Error.
Variation
지구는 지리적 축선을 중심으로 회전한다. 지도와 차트들은 지리적 극점을 통과하는 자오선을 통해 그려진다. 진북으로부터 측정된 방향을 true directions라 부른다. 자기 나침반이 가리키는 북극은 지리적 북극과 일치하지 않으며 약 1,300마일 떨어져 있다. 자북으로부터 측정된 방향을 magnetic directions라 부른다. 공중 항법에서는 진북과 자북의 차이를 편차(variation)라 부른다(육상 항법에서는 이를 declination이라 부름).
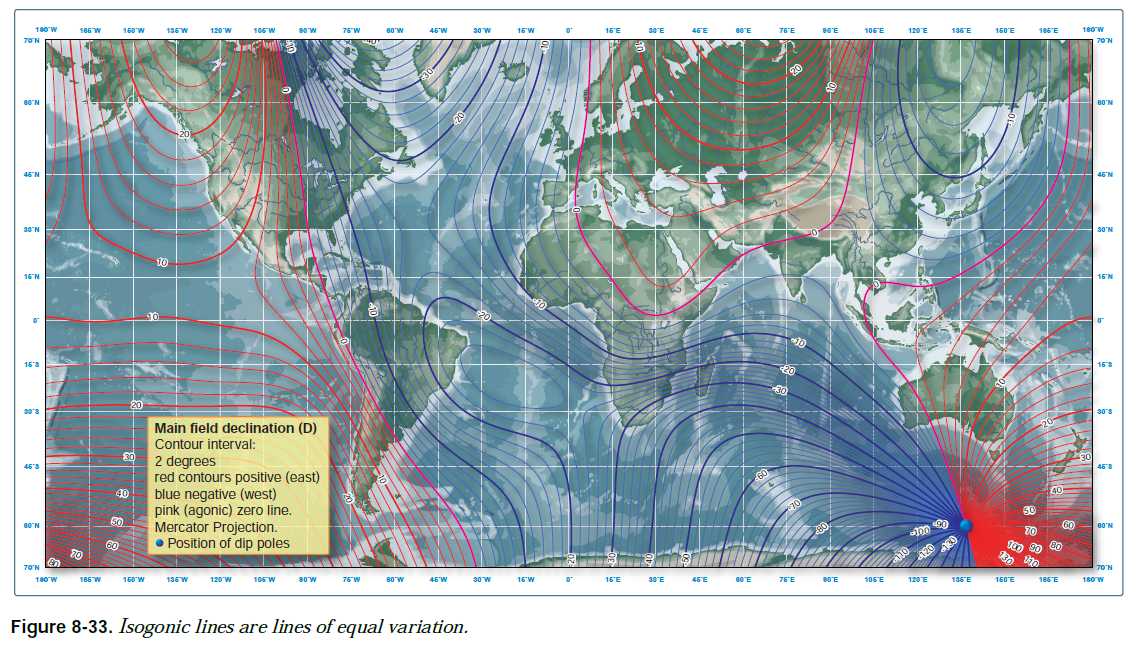
그림 8-33은 등편차선(isogonic line)을 보여주며 이는 편차의 양을 나타낸다. 시카고 근처를 지나는 선을 무편차선(agonic line)이라 부른다. 이 선에서는 두 극이 정렬되어 있으며 편차가 없다. 이 선으로부터 동쪽에 위치하는 경우에는 자북이 지리학상 북극의 서쪽에 있다. 따라서 true direction을 얻으려면 나침반 지시를 수정해야 한다.
예를 들어 워싱턴 D.C.를 비행할 때에는 편차가10도 서쪽이다. 만약 조종사가 남쪽(180도)으로 향하는 true course를 비행하고자 한다면 여기에 편차를 더해서 190도의 magnetic course를 비행해야 한다. 로스앤젤레스 캘리포니아를 비행할 때에는 편차가14도 동쪽이다. 만약 조종사가 180도의 true course를 비행하고자 한다면 여기에 편차를 빼서 166도의 magnetic course를 비행해야 한다. 편차는 항공기의 heading과 무관하며 등편차선을 따라 어느 곳에서든 같다.
Deviation
나침반의 자석은 모든 자기장에 정렬된다. 전류의 흐름, 자화된 부품, 그리고 자기장과의 충돌은 항공기 내에 자기장을 만들어낸다. 이러한 항공기 자기장들은 자차(deviation)이라 불리는 나침반 오류를 만든다.
자차는 항공기 heading에 따라 달라진다. 그리고항공기의 지리적 위치는 자차에 영향을 미치지 않는다. 누구도 편차를 줄이거나 변화시킬 수는 없다. 허나 AMT(aviation maintenance technician)은 “swinging the compass”라 알려진 정비 작업을 통해 편차를 최소화할 수 있다.
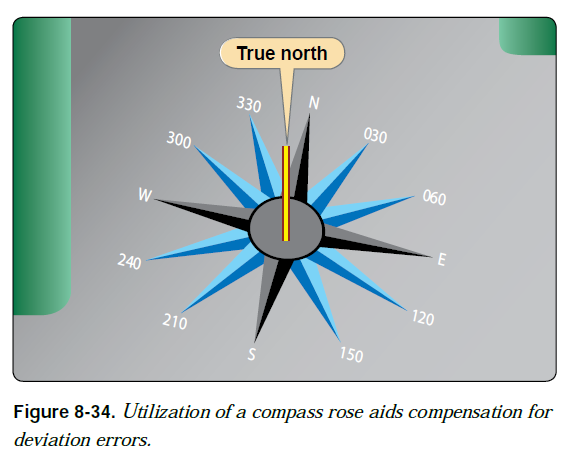
AMT는compass를 swing 하기 위해 보통 항공기를 compass rose에 위치시킨다. [그림 8-34] compass rose는 매 30도마다 표시되는 일련의 선들로 구성되어 있으며자북을 기준으로 한다. compass rose에서는 자기 간섭이 적다. 조종사는 항공기를 compass rose로 이동시킨 후에 AMT가 지정하는 heading으로 항공기를 배치시킬 수 있다.
항공기가 compass rose heading에 정렬되면 AMT는 나침반의 위나 아래에 위치한 compensator assembly를 조정한다. compensator assembly는 두 개의 축을 가진다. 이들의 끝에는 드라이버 슬롯이 있으며 나침반의 앞부분을 통해 이용할 수 있다. 각 축은 한 개나 두 개의 작은 compensating magnets를 회전시킨다. 하나의 축 끝부분은 E-W로 표시되어 있다. 이 축의 compensating magnets는 항공기가 동쪽이나 서쪽으로 향할 때 나침반에 영향을 미친다. 다른 축의 끝부분은 N-S로 표시되어 있으며 이 축의 compensating magnets는 항공기가 북쪽이나 남쪽으로 향할 때 나침반에 영향을 미친다.
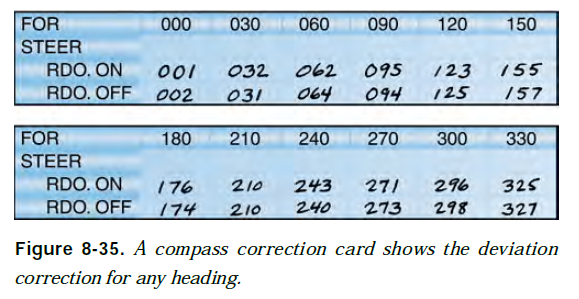
compensating magnets를 조정하여 나침반 지시와 실제 magnetic heading의 차이를 최소화한다. AMT는 나머지 오류를 compass correction card에 기록한 다음 이를 나침반 근처의 홀더에 넣는다. [그림 8-35] 오직 AMT만이 나침반을 조정하거나compass correction card를 작성할 수 있다. 조종사는 card에 기록된 자차를 통해compass headings를 결정 및 비행한다. 또한 조종사는 자기 간섭을 일으키는 장비들(예를 들어 라디오, deicing equipment, pitot heat, 레이더, 혹은 자성을 띠는 화물)을 주의해야 한다.
자차와 편차는 아래와 같이 true course부터 올바른 순서로 수정되어야 한다.
Step 1: Determine the Magnetic Course
True Course(180도) ± Variation(+10도) = Magnetic Course(190도)
적용할 자차가 없다면 190도의 magnetic course로 비행한다. 190도의 compass course를 위해선 compass card를 반드시 고려해야 한다.
Step 2: Determine the Compass Course
Magnetic Course(step1의 190도) ± Deviation(correction card의 -2도) = Compass Course(188도)
NOTE: compass card에 나열된 magnetic courses의 중간 값을 계산해야 한다. 따라서 true course 180을 비행하기 위해선 compass course 188을 따라야 한다.
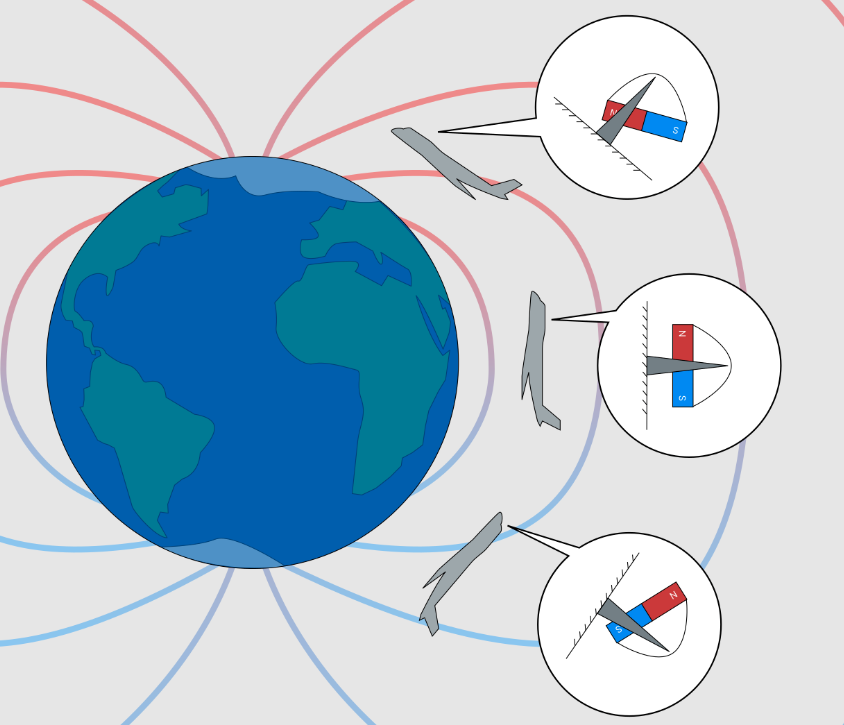
지구의 자기장은 자기 적도(자북과 자남의 중간 지점)에서만 지면으로부터 평행하게 이동한다. 자기 적도에서 자극 쪽으로 이동할수록 지구 표면에 대해 지구 자기장을 수직으로 당기는 각도가 점점 증가한다. 이 각도를 복각(dip angle)이라 부른다. 복각은 자북으로 이동할수록 아래쪽 방향으로 증가하고 자남으로 이동할수록 위쪽 방향으로 증가한다.
(Magnetic Dip. 출처: Wikipedia)
만약 나침반 바늘이 3차원으로 자유롭게 움직일 수 있도록 장착되면 이는 자기장에 정렬되어 위나 아래로 복각을 만든다. 허나 복각은 항법을 위한 관심사가 아니므로 나침반은 수평면에서만 회전할 수 있도록 만들어졌다. 이는 자기력의 수직 성분이card를 수평면으로부터 크게 기울이지 못할 정도로 무게 중심을 피벗점 아래로 낮추고 float assembly를 무겁게 만듦으로서 이루어졌다. 덕분에 나침반은 복각에 대한 특별한 수정 없이도 모든 위도에서 효과적으로 작동할 수 있다. 허나 자극 근처에서는 지구 자기장의 수평 성분이 나침반을 정렬하기엔 너무 작아져서 나침반을 항법에 사용할 수 없게 만든다. 이러한 한계로 인해 나침반은 card가 수평일 때에만 올바르게 표시된다. 때문에 card가 수평면으로부터 기울어지면 지구 자기장의 수직 성분으로 인해 northerly turning errors와southerly turning errors가 발생한다.
Northerly Turning Errors
float assembly의 무게중심은 피벗점보다 낮다. 비행기 선회 도중에는 복각으로 인한 힘 때문에 float가 돌아가는 방향과 같은 쪽으로 float assembly가 휙 움직인다. 이로 인해false northerly turn indication이 발생한다. 이러한float assembly의 선도(lead) 오류 때문에 특정 heading에 도달하기 전에 northerly turn을 멈춰야 한다. 이러한 나침반 오류는 극에 근접할수록 커진다. 이러한 선도 오류를 보정하기 위한 한 가지 rule of thumb는 위도의 절반에 15도를 더한 지점에서 선회를 멈추는 것이다(만약 비행기가 위도 40도 주변을 비행하고 있다면 특정 heading에 도달하기 15 + 20 = 35도 전에 선회를 멈춰야 한다.) [그림 8-36A]
Southerly Turning Errors
남쪽 방향으로 선회할 때 발생하는 힘들은 compass float가 지연(lag)되게 만든다. 이로 인해false southerly turn indication이 발생한다. 선회를 멈추기 전에 float assembly가 특정 heading을 통과할 수 있도록 해야 한다. 이 오류 또한 극에 근접할수록 커진다. 지연 오류를 수정하기 위해서는 선회를 중단하기 전에 특정 heading을 통과해야 한다. 위도의 절반에 15를 더하는 규칙이 여기에도 적용된다(만약 비행기가 위도 30도 주변을 비행하고 있다면 특정 heading을 통과한 후 15 + 15 = 30도 지점에서 선회를 멈춰야 한다). [그림 8-36B]
(출처: youtuube/flight-club)
Acceleration Error
동쪽/서쪽으로 향하는 도중에 가속/감속을 수행하면 복각과 관성으로 인해 나침반 오류가 발생한다. compass card는 펜던트처럼 장착되어있기 때문에 가속 도중에는 compass card의 뒤쪽 끝이 위로 기울어지며 감속 도중에는 아래로 기울어진다. 동쪽/서쪽으로 향하는 heading에서 가속을 수행하면 북쪽으로 향하여 선회한다는 잘못된 지시가 나타난다. 반면 동쪽/서쪽으로 향하는 heading에서 감속을 수행하면 남쪽으로 향하여 선회한다는 잘못된 지시가 나타난다. “ANDS”(Acceleration-North/Deceleration-South)라는 단어가 가감속 오류를 기억하는데 도움이 될 수 있다. [그림 8-37] 가속은 북쪽을 가리키고 감속은 남쪽을 가리킨다.
(출처:youtube/flight-club)
Oscillation Error
oscillation은 앞서 언급한 모든 오류들이 합쳐진 것이다. oscillation으로 인해 compass card는 현재 비행 중인 heading의 주위를 오락가락 한다. gyroscopic heading indicator가 magnetic compass와 정렬되도록 설정하는 경우에는 그 오락가락한 값들 사이의 평균치를 사용한다.
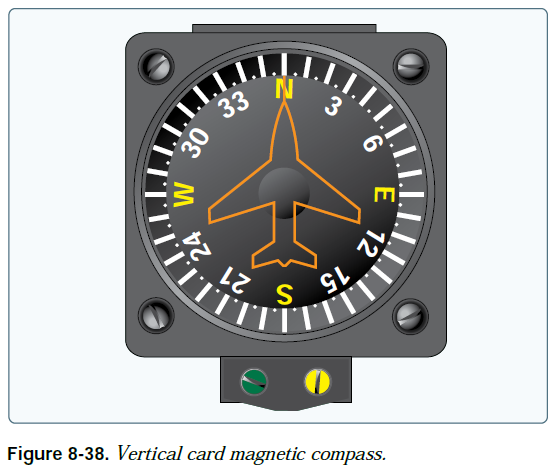
The Vertical Card Magnetic Compass
vertical card magnetic compass는 magnetic compass와 관련된 오류와 헷갈림을 다소 줄여준다. 이 나침반의 눈금판은 기본 방위를 나타내는 문자, 30도 단위의 숫자, 그리고 5도 단위의 눈금으로 표시된다. 축에 장착된 자석에 의해 눈금판이 회전한다. 비행기 모형의 기수는 항공기의 heading을 읽기 위한 lubber line을 나타낸다. [그림 8-38]
Lags or Leads
북쪽 방향으로부터 선회를 시작하면 나침반이 선회로부터 지연된다. 남쪽 방향으로부터 선회를 시작하면 나침반이 선회를 선도한다.
Eddy Current Damping
vertical card magnetic compass에서는 oscillating permanent magnet의 자속이 damping disk에 와상전류를 생성한다. 와상전류에 의해 생성된 자속은 영구 자석의 자속과 반대 방향으로 작용하여 oscillation을 감소시킨다.
OAT gauge는 간단하고 효과적인 장치이다. 이 센서는 외부 공기에 노출되도록 장착된다. 센서는 bimetallic-type thermometer로 구성된다. 서로 다른 두 물질이 하나의 가느다란 조각에 용접된 다음 나선형으로 꼬여진다. 한쪽 끝은 보호관 내에 고정되어 있으며 다른 한쪽 끝은 계기의 지시침에 부착되어 있다. OAT gauge는 섭씨, 화씨, 혹은 둘 다 표기한다. 정확한 공기 온도는 고도 변화에 따른 기온감률에 대한 정보를 제공한다. [그림 8-39]
※ 다음은 Skybrary를 발췌한 내용이다.
항공기 외부에서 측정되는 주변 온도를 OAT(Outside Air Temperature), 혹은 SAT(Static Air Temperature)라 부른다. 공기 흐름이 indicated temperature에 영향을 미치지 않도록 OAT 센서가 배치되어야 한다.
공기 흐름에 놓인 센서를 통해 온도를 측정하면 공력가열이 발생하기 때문에 OAT보다 높아진다. 이렇게 측정된 온도를 TAT(Total Air Temperature)라 부르며 ADC에서 TAS(True Airspeed)를 계산하는데 사용된다. TAT를 정확하게 측정하기 위해선 TAT probe가 신중하게 설계 및 배치되어야 한다.
비행계기들 덕분에 항공기는 최대 성능으로, 그리고 높은 안전성으로 운영될 수 있다(특히 장거리 비행 시). 제조업체들은 필수 비행계기들을 제공하며이들을 효과적으로 사용하기 위해 조종사는 계기들이 어떻게 작동하는지 알아야 한다. 조종사는 pitot-static system 및 이와 연관된 계기들, vacuum system 및 이와 연관된 계기들, gyroscopic instruments, 그리고 magnetic compass의 운영상 측면을 잘 알아야 한다.