1-2-1. General
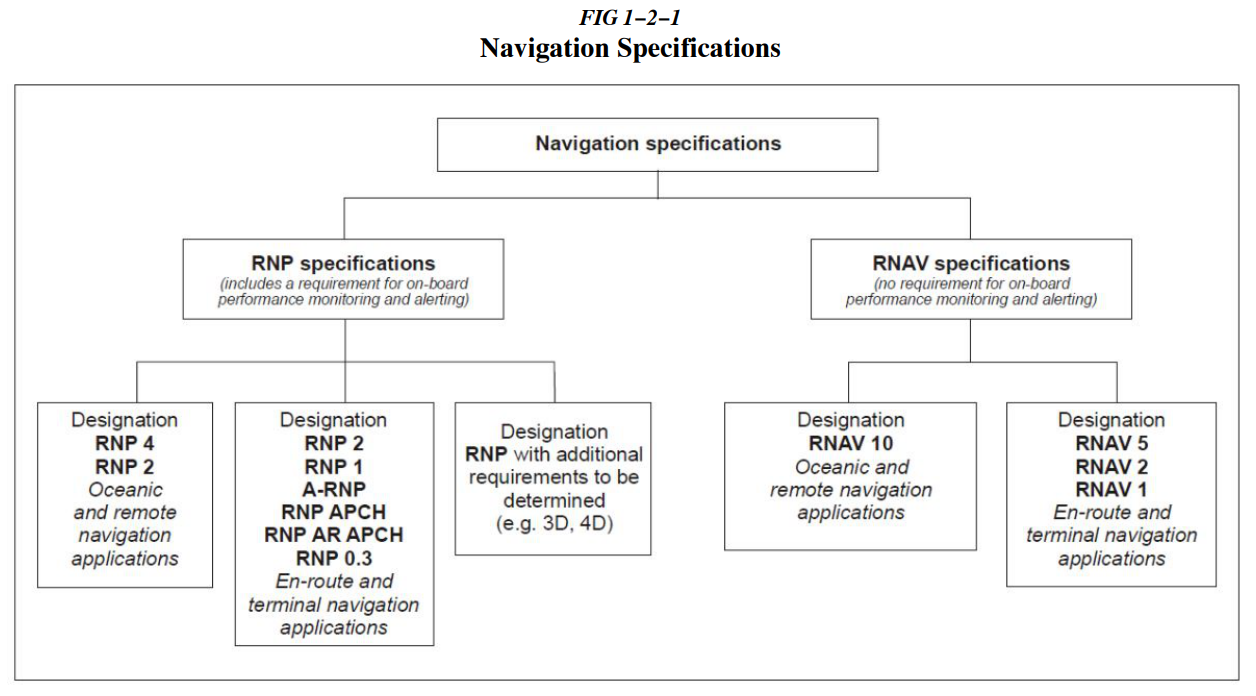
a. Introduction to PBN. PBN은 area navigation(RNAV)의 산하에 존재한다. 여기서 RNAV라는 용어는 항공기 장비 기능에 관계없이 단지 “지역 항법”을 의미한다. (그림 1-2-1 참조.) 많은 운영자들이 PBN의 이점을 얻기 위하여 시스템을 업그레이드하였다. PBN은 두 가지 사양으로 나뉜다: area navigation(RNAV), 그리고 required navigation performance(RNP). 여기서 RNAV x라는 용어는 특정 수평 정확도를 가진 특정 항법 사양을 의미한다. 항공기가 PBN 조건을 충족하기 위해선 특정 RNAV나 특정 RNP의 정확도가 비행시간의 95%를 충족해야 한다. RNP는 performance monitoring and alerting capability(예를 들어 RAIM [Receiver Autonomous Integrity Monitoring])를 포함하는 시스템이다. PBN은 NavSpecs(navigation specifications)라는 개념도 도입하였다. 이는 특정 airspace concept 내에서 항법을 적용하는데 필요한 항공기 조건과 조종사 조건을 말한다. RNP와 RNAV의 NavSpecs에 대한 수치는 공역, 항로, 혹은 절차 내를 운영하는 항공기들이 비행시간의 최소 95%를 달성하리라 예상되는 수평 항법 정확도를 NM 단위로 나타낸다. 이 정보는 ICAO DOC 9613, Performance-based Navigation(PBN) Manual, 그리고 FAA AC 90-105, Approval Guidance for RNP Operations and Barometric Vertical Navigation in the U.S. National Airspace System and in Remote and Oceanic Airspace에 자세히 나와 있다.
※ 다음은 대한항공 항법 교재를 발췌한 내용이다.
Part 5. Performance-based Navigation (PBN)
CNS ATM(Communication Navigation Surveillance Air Traffic Management)의 Navigation 개념의 핵심은 Performance-based Navigation입니다. PBN은 RNAV와 RNP로 구성되어 있습니다.
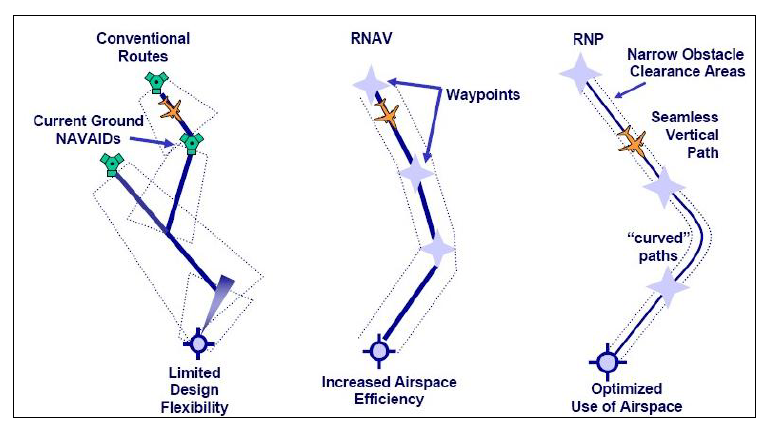
RNAV는 Area Navigation의 약자로 지역항법이라고 합니다. RNAV는 항행안전시설과 자립항법 시스템을 이용한 두 지점간의 최단거리 비행 또는 가장 효율적인 항로 비행을 가능하게 해주는 항법을 말합니다. 지금까지의 항법은 지상항행안전시설의 위치에 제약을 받았으나, RNAV는 지상 항행안전시설의 위치라는 한계를 넘어선 항법입니다. 기존의 항로와 SID/STAR들은 지상 항행안전시설들의 위치와 통달 거리 등의 제약에 의해 최적의 설계가 이루어질 수 없었습니다. 그러나 RNAV를 이용한 항로와 SID/STAR들은 지상시설들의 위치에 관계없이 가장 효율적으로 설계될 수 있는 것입니다. RNAV는 Conventional 항법과 대치되는 개념이 되겠습니다.
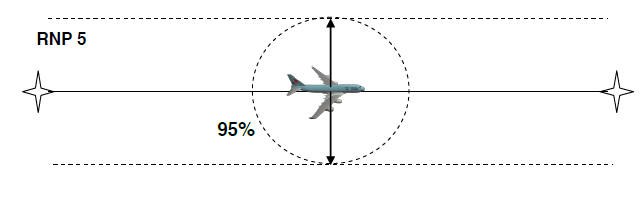
그럼 RNP는 무엇일까요? RNP 는 Required Navigation Performance의 약어로 "요구되는 항법 성능‟ 정도로 해석이 될 수 있습니다. 그럼 구체적으로 RNP가 무엇인지 예를 하나 들어보겠습니다. RNP 5란 RNP 5 정확도가 요구되는 비행 구간을 비행할 때 소요되는 총 비행시간의 95% 시간 동안 항공기 항법 시스템이 보여주는 항공기의 위치로부터 5 NM 거리 안에 실제 항공기가 위치해 있으면 되는 정확도를 말합니다.
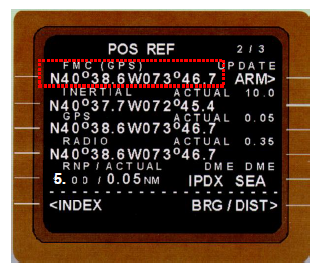
그림의 MCDU는 항공기 위치를 보여주고 있습니다. 그럼 항공기는 이 위치에 오차 없이 정확히 위치해 있을까요? 물론 아닙니다. 보여지는 위치가 항공기의 위치라고 FMS에서 계산되어 보여지고 있지만 실제 항공기는 이 위치로부터 떨어져있을 것입니다. 즉, FMS가 보여주는 위치로부터 실제 항공기가 5 NM 거리 안에 위치해야 하는 정확도가 바로 RNP 5 입니다. 위의 그림에서 RNP는 5이고, ANP(Actual Navigation Performance)는 0.05로 실제 항공기의 항법 성능이 요구되는 항법 성능보다 월등히 높음을 보여주고 있습니다.
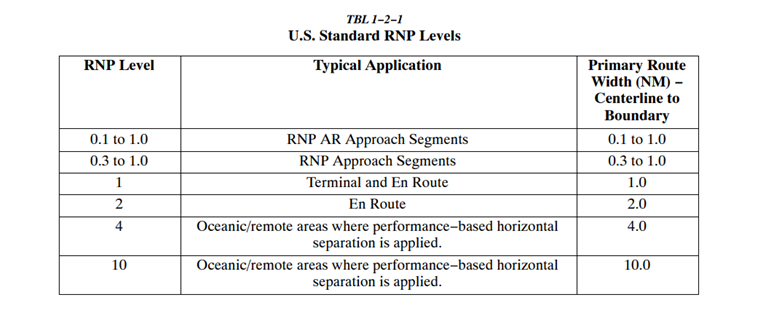
RNP 뒤에 붙는 숫자의 크기가 크면 클수록 요구되는 정확도는 낮고, 숫자가 작으면 작을수록 요구되는 정확도는 높게 됩니다. 이 예로 대양의 경우 RNP 10 또는 4가 요구되고, RNP 접근의 경우에는 0.1~0.3까지 요구됩니다.
PBN이라는 상위 개념이 도입되면서 그 두 요소인 RNAV와 RNP는 새롭게 정의됩니다. 예로 RNAV 5와 RNP 5가 있다고 가정해 보겠습니다.

RNAV 뒤에도 5라는 숫자가 있고, RNP 뒤에도 5라는 숫자가 있습니다. 이 둘은 같은 정확도를 요구하는 것일까요 아니면 다른 정확도를 요구하는 것일까요? RNAV 5와 RNP 5 둘이 요구하는 정확도는 5NM로 동일하며, RNP에도 지역항법의 개념이 포함됩니다. 그럼 둘 다 5NM 이라는 정확도가 요구되는 지역항법이라고 해석이 됩니다. 그럼 이 둘이 차이는 무엇일까요? RNP 운항을 하고자 하는 항공기는 항공기의 항법 성능을 Monitor하고 Alerting하는 기능을 장착하고 있어야 하며, RNAV 운항을 하고자 하는 항공기에는 이러한 기능이 요구되지 않는 것입니다.
항공기 항법 성능을 Monitor하고 Alerting한다는 것은 요구되는 항법 정확도보다 실제 정확도가 낮을 경우 조종사에게 이 사실을 알려주는 기능을 말합니다. 이 Monitoring과 Alerting 기능은 비행에 꼭 필요한 기능으로 보여지는 데 왜 RNAV 운항에는 이 기능이 요구되지 않을까요? PBN의 개념에서 RNAV 운항은 통상적으로 ATC 레이더 감시하에서 이루어지기 때문입니다. 즉, 항공기의 항법 성능이 저하되어 현재 비행하고 있는 항로로부터 제한치 이상으로 벋어난 경우 ATC에서 이를 감지한 후 조종사에게 이 사실을 알려줄 수 있기 때문입니다. 정리해보면, RNP는 항공기 항법 성능을 Monitoring and Alerting하는 기능이 요구되는 RNAV 운항이고, RNAV는 ATC 레이더 통달 범위 안에 설계되기 때문에 위의 기능을 요구하지 않은 지역항법이다 라고 이해하시면 되겠습니다.
b. Area Navigation(RNAV)
1. General. RNAV는 지상 기반 항법 보조시설이나 우주 기반 항법 보조시설의 범위 내에서, 혹은 항공기 독립 시스템의 기능 내에서 원하는 비행경로를 운항할 수 있도록 만드는 항법이다. 미래에는 지상 항법 보조시설에 의해 규정된 경로 대신 RNAV의 사용도가 증가할 것이다. RNAV routes와 terminal procedures(departure procedures와 standard terminal arrivals 포함)는 RNAV 시스템을 염두에 두고 설계되었다. RNAV routes와 procedures는 몇 가지 잠재적 이점이 있다:
(a) 시간과 연료가 절약됨.
(b) radar vectoring, altitude, 그리고 speed assignments에 대한 의존도가 감소하며 이로 인해 ATC 교신이 감소함.
(c) 공역을 보다 효율적으로 사용하게됨.
RNAV DPs, STARs, 그리고 routes에 대한 추가적인 정보는 AC 90-100, U.S. Terminal and En Route Area Navigation(RNAV) Operations에서 확인할 수 있다.
2. RNAV Operations. RNAV procedures(예를 들어 DPs와 STARs)에서는 절차 중심선을 정확히 인지 및 유지해야 한다. 조종사는 항공기 항법 시스템에 대한 실무지식을 갖춰야만 RNAV procedures를 올바른 방법으로 비행할 수 있다. 또한 조종사는 RNAV procedures에서 사용되는 다양한 waypoint 유형과 leg 유형을 이해해야 한다. 이에 대한 내용은 아래에서 자세히 설명된다.
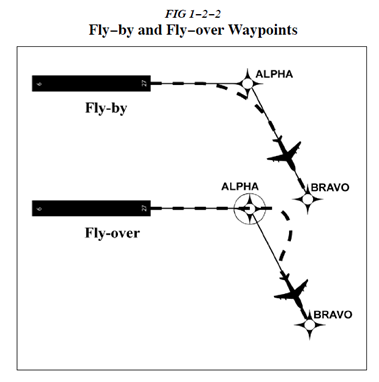
(a) Waypoints. waypoint는 위도/경도 좌표로 규정되는 지리적 위치이다. waypoints는 기존의 navaids•intersection•fixes와 연관될 수도 있다. waypoint는 경로를 따른 방향, 속도, 혹은 고도의 변화를 나타내는데 가장 많이 사용된다. RNAV procedures는 fly-over waypoint와 fly-by waypoint를 모두 사용한다.
(1) Fly-by waypoints. fly-by waypoints는 두 개의 경로를 분리하는 waypoint에 도달하기 전에 다음 course로 선회를 시작해야 할 때 사용된다. 이를 turn anticipation이라 부른다.
(2) Fly-over waypoints. fly-over waypoints는 항공기가 선회를 시작하기 전에 해당 지점 상공을 비행해야 할 때 사용된다.
NOTE -
그림 1-2-2는 fly-by waypoint와 fly-over waypoint의 몇 가지 차이점을 보여준다.
(b) RNAV Leg Types. leg 유형은 RNAV procedure의 waypoint들 사이에서 진행해야할 경로를 설명한다. leg 유형은 path(예를 들어 heading, course, track, 등등)와 termination point(예를 들어 고도, 거리, fix, 등등)를 설명하는 두 글자의 코드로 식별된다. 절차의 설계에 사용되는 leg 유형은 항공기 항법 데이터베이스에 포함된다. 허나 차트에서는 보통 제공되지 않는다. 대신 RNAV 차트의 narrative가 절차를 비행하는 방법을 설명한다. “path and terminator concept”는 절차의 모든 leg에 termination point가 있으며 해당 termination point로 향하는 path도 있다는 것을 규정한다. 이용 가능한 leg 유형의 일부가 아래에 설명되어 있다.
(1) Track to Fix. TF(Track to Fix) leg는 다음 waypoint로 향하는 track을 교차하였을 때 얻어진다. 이러한 이유로 TF leg를 point-to-point legs라 부르기도 한다. Narrative: “direct ALPHA, then on course to BRAVO WP.” 그림 1-2-3 참조.

(2) Direct to Fix. DF(Direct to Fix) leg는 초기 지점으로부터 다음 waypoint까지 항공기가 그리는 경로이다. Narrative: “turn right direct BRAVO WP.” 그림 1-2-4 참조.

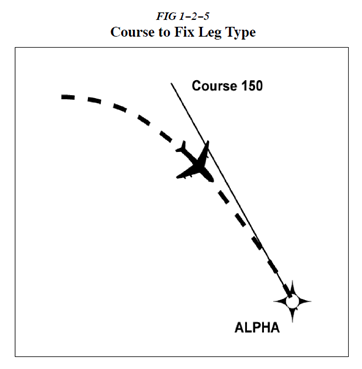
(3) Course to Fix. CF(Course to Fix) leg는 특정 course를 갖춘 fix에서 종료되는 경로이다. Narrative: “on course 150 to ALPHA WP.” 그림 1−2−5 참조.
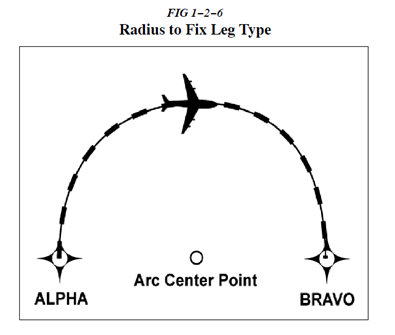
(4) Radius to Fix. RF(Radius to Fix) leg는 특정 turn center를 중심으로 선회한 다음 fix에서 종료되는 일정한 반지름의 원형 경로로 규정된다. 그림 1-2-6 참조.
(5) Heading. heading leg는 VA(Heading to Altitude), VD(Heading to DME range), 그리고 Heading to Manual Termination(즉, Vector [VM]) 등등으로 규정될 수 있다. Narrative: “climb heading 350 to 1500”, “heading 265, at 9 DME west of PXR VORTAC, right turn heading 360”, “fly heading 090, expect radar vectors to DRYHT INT.”
(c) Navigation Issues. 조종사는 정보에 입각한 결정을 내리기 위하여 항법 시스템의 입력, 경고, 그리고 알림을 알고 있어야 한다. 또한 특정 센서/시스템의 유효성과 적합성을 고려해야 한다.
(1) GPS/WAAS. TSO-C129(), TSO-C196(), TSO-C145(), 혹은 TSO-C146() 시스템을 사용하는 경우에는 적절한 RAIM availability와 CDI sensitivity를 확인하기 위해 출항 공항과 입항 공항이 입력되었는지 확인해야 한다.
(2) DME/DME. DME/DME의 위치 업데이트는 항법 시스템의 로직과 DME 시설의 근접성•유효성•기하학적 구조•signal masking에 따라 달라진다는 것을 인지해야한다.
(3) VOR/DME. VOR의 특성으로 인해 VOR/DME의 위치 업데이트는 GPS나 DME/DME의 위치 업데이트보다 덜 정확할 수 있다.
(4) Inertial Navigation. inertial reference unit과 inertial navigation system은 보통 다른 유형의 항법 입력(예를 들어 DME/DME나 GPS)과 결합되어 전반적 항법 시스템 성능이 향상된다.
NOTE -
특정한 관성 위치 업데이트 조건이 적용될 수도 있다.
(d) Flight Management System(FMS). FMS는 센서, 수신기, 그리고 항법 데이터베이스와 연결된 컴퓨터가 통합된 제품이다. 이러한 시스템은 보통 화면과 automatic flight control systems에 성능과 RNAV 안내를 제공한다.
FMS는 여러 소스(예를 들어 GPS, DME, VOR, LOC, 그리고 IRU)로부터 입력을 수신할 수 있다. 이러한 입력들은 한 번에 하나씩 navigation solution에 적용되거나 조합되어서 적용될 수 있다. 일부 FMS는 결함이 있는 항법 정보를 탐지 및 분리한다.
FMS는 보통 위치 업데이트를 위해 GPS 및/혹은 DME/DME에 의존한다. FMS 시스템 구조와 navigation source의 기하학적 구조에 따라 다른 입력들이 통합될 수도 있다.
NOTE -
하나 이상의 IRU와 결합된 DME/DME 입력을 종종 DME/DME/IRU나 D/D/I라 축약한다.
(e) RNAV Navigation Specifications(Nav Specs)
Nav Specs란 특정 airspace concept 내에서 항법을 적용하는데 필요한 항공기 조건과 승무원 조건을 말한다. RNP와 RNAV의 수치는 수평 항법 정확도를 NM 단위로 나타낸다. 이는 공역, 항로, 혹은 절차 내를 운영하는 항공기들이 비행시간의 최소 95%를 달성하리라 예상되는 값이다. (그림 1-2-1 참조.)
(1) RNAV 1. 일반적으로 RNAV 1은 DP와 STAR에서 사용된다. 항공기는 총 비행시간의 95% 동안 1NM 미만의 시스템 오류를 유지해야 한다.
(2) RNAV 2. 일반적으로 RNAV 2는 en route에서 사용된다(단, 달리 명시된 경우 제외). T-routes와 Q-routes는 이러한 Nav Spec의 예이다. 항공기는 총 비행시간의 95% 동안 2NM 미만의 시스템 오류를 유지해야 한다.
(3) RNAV 10. 일반적으로 RNAV 10은 oceanic에서 사용된다. RNP 10과 RNAV 10 용어 사이의 관계에 대한 자세한 내용은 paragraph 4-7-1을 참조한다.