a. converging runways(즉, 15 ~ 100도의 끼인각을 가지는 활주로들)에서의 동시 계기 접근이 승인된 공항의 경우 ATC는 이를 실시할 수 있다.
b. 각 converging runway에 대한 별도의 표준 계기 접근 절차가 개발되어야 한다. 이런 접근들은 제목의 “V”를 통해 식별될 수 있다(예를 들어 “ILS V Rwy 17 (CONVERGING).”) Missed Approach Point들은 최소 3마일 이상 떨어져 있어야 한다. 그리고 missed approach procedures는 missed approach protected airspace가 겹치지 않도록 해야 한다.
c. 그 외의 필요조건으로는: 레이더 가용성, 교차하지 않는 final approach courses, 그리고 각 활주로에 대한 precision approach 능력이 있다. 만약 활주로가 교차한다면 관제사는 intersecting runway separation criteria 뿐만 아니라 visual separation도 적용할 수 있어야 한다. 또한 intersecting runways는 700ft의 ceilings와 2마일의 visibility를 필요로 한다. straight in approaches and landings가 반드시 이루어져야 한다.
d. simultaneous converging approaches가 사용 중인 경우 이는 ATIS를 통해 방송되거나, 혹은 관제사와의 initial contact 시 조언 받는다. 분리 책임이 tower에 위임되지 않은 곳의 경우 radar controller는 tower controller와의 직접 교신 기능을 갖추어야 한다.
a. RNP AR procedures는 Category II ILS procedure나 Category III ILS procedure에 필요한 특별 승인과 유사한 인가를 필요로 한다. RNP AR approach나 RNP AR departure를 비행하기 위해선 FAA의 특정 승인을 받아야 한다. FAA는 OpSpec(operations specification), MSpec(management specification), 혹은 LOA(letter of authorization)을 통해 RNP AR 인가를 발부한다. 예외란 없다. 조종사는 AC 90−101, Approval Guidance for RNP Procedures with AR을 통해 RNP AR 항공기 자격, 운영 절차, 그리고 훈련 필요조건에 대한 포괄적인 정보를 찾을 수 있다.
b. RNP AR Operations Approach title의 고유한 특징. FAA는 모든 RNP AR IAP(instrument approach procedures)를 “RNAV (RNP) RWY XX”라 명명한다. 국제적으로는 “RNP RWY XX (AR)”이라 명명된 RNP AR IAP를 찾을 수 있다. 모든 RNP AR procedures는 차트에 “Authorization Required”라 명시한다.
c. RNP value. RNP AR procedures는 RNP value(NM 단위)의 2배(2 X RNP)와 동일한 OEA(Obstacle Evaluation Area)를 사용하는 것이 특징이다. secondary lateral OEA는 존재하지 않는다. RNP AR procedures는 최소 RNP 0.30의 정확도를 필요로 한다. RNP AR procedure의 각 line of minima는 Final Approach Segment에서의 성능 조건을 규정하는 RNP value를 갖는다. 각 RNP AR 운영자에게 발부된 FAA authorization이 최소 RNP approach value를 식별한다. 이러한 값은 항공기 외장, 혹은 운영 절차(예를 들어 flight director나 autopilot의 사용)에 따라 달라질 수 있다.
d. Radius-to-fix(RF) legs. 많은 RNP AR IFP가 RF leg를 포함하고 있다. RF legs에 대한 항공기 자격은 RNP AR 운영을 위한 모든 인가에서 요구된다.
e. 1.00NM 미만의 Missed Approach RNP value. 일부 RNP AR IFP는 missed approach segment에서 1.00NM 미만의 RNP 정확도를 요구한다. FAA가 발부한 RNP AR authorization은 운영자가 1.00NM 미만의 정확도를 요구하는 missed approach procedure를 수행할 수 있는지의 여부를 명시한다. AC 90-101은 RNP AR procedures의 이러한 면에 적용되는 운영 절차와 훈련 필요조건을 식별한다.
f. non-standard speeds, 혹은 non-standard climb gradients. RNP AR approaches는 non-standard approach speeds 및/혹은 non-standard missed approach climb gradients를 필요로 할 수 있다. RNP AR approach charts는 모든 non-standard 필요조건을 반영한다. 조종사는 접근을 수행하기 전에 이러한 필요조건을 만족할 수 있는지를 확인해야 한다.
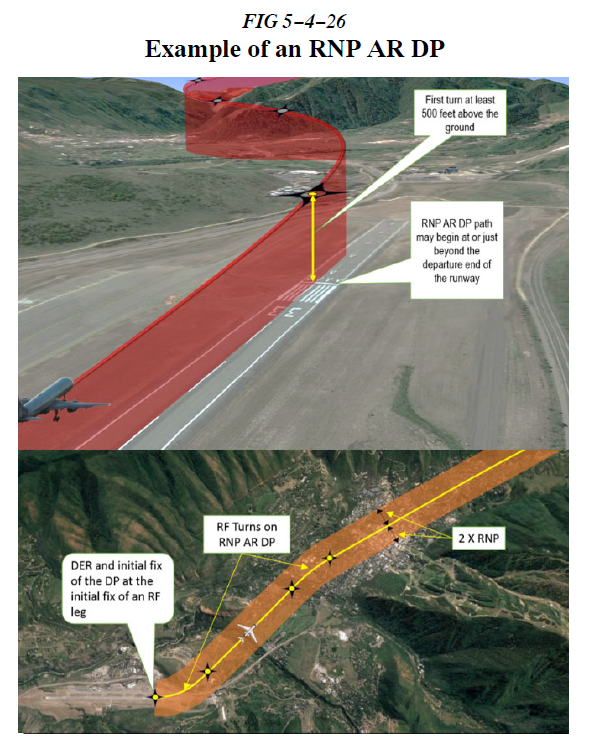
g. RNP AR Departure Procedures(RNP AR DP). RNP AR DP를 수행하기 위해선 운영자는 RNP AR approach authorization을 반드시 갖추어야 한다. RNP AR DP는 RNP 0.30을 사용할 수 있고, standard climb gradients 이상을 포함할 수 있으며, RF turns를 포함할 수 있다. RNP AR DP와 연관된 close in RF turns가 DEP(departure end of the runway)에서 시작될 수 있다. 구체적인 자격 지침을 위해 AC 90-101을 참조해야 한다.
a. ATC는 1,200ft 이하로 나뉜 parallel runways 중 하나에 적용되는 표준 계기 접근 절차를, 그리고 adjacent runway에서의 straight-in landing을 승인할 수 있다.
b. side-step maneuver를 진행하는 항공기는 특정 접근 절차를 수행하도록, 그리고 adjacent parallel runway에 착륙하도록 승인된다. 예를 들어, “cleared ILS runway 7 left approach, side-step to runway 7 right.” 조종사는 runway나 runway environment를 확인하자마자 최대한 빨리 side-step maneuver를 수행해야 한다. side-step maneuver가 시작된 후에도 stepdown fixes와 관련된 minimum altitudes를 준수해야 한다.
NOTE-
승인된 접근 방식에 상관없이 side-step minima는 MDA(Minimum Descent Altitude)까지 비행된다.
c. adjacent runway로 향하는 landing minimums는 nonprecision criteria를 기초로 한다. 따라서 이는 primary runway로 향하는 precision minimums보다 높다. 허나 보통 circling minimums보다는 낮다.
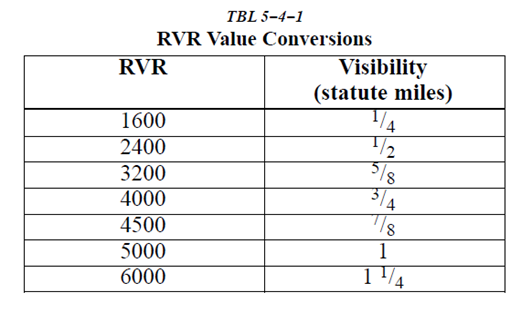
a. Landing Minimums. landing minimums에 적용되는 규칙들은 14 CFR Section 91.175에 수록되어 있다. 표 5-4-1은 RVR을 지상시정이나 비행시정으로 변환하기 위해 사용될 수 있다. 표에 나열되지 않은 중간 값을 변환하는 경우에는 그 다음으로 높은 RVR 값을 사용한다(즉, 보간하지 않는다). 예를 들어 1800 RVR을 변환할 경우 2400 RVR을 사용한다. 그 결과 시정 1/2 마일을 구한다.
b. Obstacle Clearance. final approach 장애물 회피는 final segment의 시작 지점으로부터 활주로나 missed approach point 중 먼 지점까지 제공된다. side-step 장애물 보호는 final approach 장애물 회피 구역의 폭을 증가시킴으로서 제공된다.
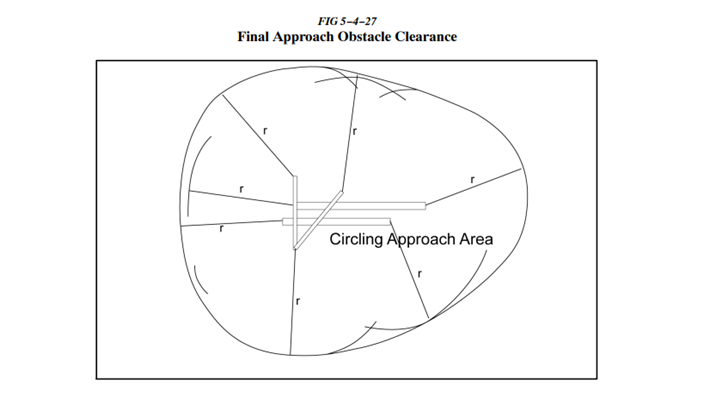
1. circling approach 보호 구역은 각 활주로의 끝단에서 그려진 호들의 접선으로 규정된다(그림 5-4-27 참조). 2012년 말 이전에 규정된 circling approach 보호 구역은 항공기의 approach category에 따른 고정된 반경 값을 사용하였다. 이는 U.S. TPP의 B2 페이지에 표시된다. standard circling approach area를 사용하는 접근의 경우 circling line of minima에 “negative C” 부호가 표시되지 않는다. 2012년 말 이후에 규정된 circling approach 보호 구역은 항공기의 approach category, 그리고 circling MDA의 고도에 따른 반경 값을 사용하여 고도 증가에 의한 진대기속도 증가를 다룬다. 이는 U.S. TPP의 B2 페이지에 표시된다. expanded circling approach area를 사용하는 접근의 경우 circling line of minima에 “negative C” 부호가 표시된다(그림 5-4-28 참조). 공항 근처 장애물로 인해 circling area의 일부가 procedural note에 의해 제한될 수 있다(예를 들어 “Circling NA E of RWY 17-35”). published minimums(MDA)는 straight-in approach, side-steps, 혹은 circle을 하는 조종사에게 장애물 회피를 제공된다. MDA 이하에서는 조종사가 반드시 장애물을 see and avoid 해야 한다. circling maneuver를 시작한 후 실패 접근을 수행하는 경우에는 보통 항공기가 MAP 너머에 있다. circling area 내부에 있는 동안 항공기가 MDA 이상이라면 장애물 회피가 유지된다. 그러나 항공기가 circling area로부터 벗어나 있다면 circling maneuver로부터 missed approach ground track으로 진입할 때 장애물 회피가 제공되지 않을 수 있다. missed approach track에 진입하기 전에 circling area 내에서 상승을 수행해야할 수 있다.
NOTE-
circling approach area radii는 approach category에 따라, 그리고 MSL circling altitude에 따라(TAS의 변화를 다루기 위해) 다르다. 그림 5-4-28 참조.
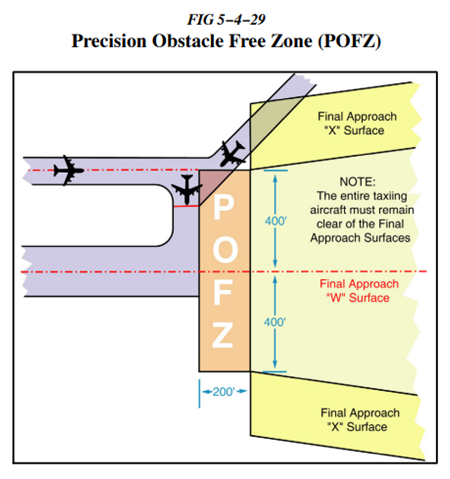
2. Precision Obstacle Free Zone(POFZ). runway threshold에서 시작되는, threshold elevation에서 시작되는, 그리고 활주로 centerline을 중심으로 하는 공역 범위. POFZ는 200ft(60m) 길이에 800ft(240m) 폭을 가진다. vertically guided final approach에 놓인 항공기가 runway threshold로부터 2nm 이내이며 공식 기상이 ceiling 250ft 미만, 혹은 시정 3/4SM(혹은 RVR 4,000ft) 미만인 경우 POFZ는 개방되어있어야 한다. POFZ가 개방되어있지 않을 때 허용되는 MINIMUM은 HAT(height above touchdown) 250ft 및 시정 3/4SM이다. 유도로에서 대기하는 항공기의 날개가 POFZ를 관통하는 경우 POFZ가 개방되어있다 간주된다. 허나 fuselage나 tail이 POFZ를 침범할 수는 없다. POFZ는 모든 활주로의 끝단(displaced thresholds 포함)에 적용된다.
c. final approach course가 활주로로부터 30도 이내인 경우, 그리고 IFR altitude에서 활주로 표면으로 정상 강하를 수행할 수 있는 경우 Straight-in Minimums가 IAP에 표시된다. 30도의 각도나 정상 강하율이 초과되는 경우에는 straight-in minimums 대신 circling minimum이 적용된다. straight-in minimums가 게재되어있지 않다 하여 조종사가 straight-in landing을 할 수 없는 것은 아니다. 만약 조종사가 활주로를 확인하였고 정상 접근을 수행할 충분한 시간이 있으며 ATC가 해당 활주로에 착륙을 승인하였다면 설령 circling minimums만 게재되어있다 하더라도 조종사는 circle을 수행하지 않아야 한다. 만약 circle을 수행하길 원한다면 조종사는 ATC에 알려야 한다.
d. Side-Step Maneuver Minimums. adjacent runway를 향하여 side-step maneuver를 수행하기 위한 landing minimums는 보통 primary runway의 minimums보다 높다.
e. Published Approach Minimums. approach minimums는 aircraft category마다 다르게 게재된다. 이는 minimum altitude(DA, DH, DMA), 그리고 required visibility로 구성된다. 이러한 minimums는 적절한 TERPS 기준을 통해 결정된다. nonprecision final segment 내에 fix가포함된 경우 두 가지 종류의 minimums가 게재될 수 있다(하나는 fix를 식별할 수 있는 경우, 그리고 다른 하나는 fix를 식별할 수 없는 경우). second altimeter source가 절차에 사용되는 경우에도 두 가지 종류의 minimums가 게재될 수 있다. 비정밀 절차가 final segment 내에 step-down fix를 포함하며 second altimeter source를 가진다면 step down fix를 다루기 위한 두 가지 종류의 minimums가 게재되며 second altimeter source에 대한note가 표시된다.
f. Circling Minimums. 일부 바쁜 terminal area의 경우 ATC가 circling을 인가하지 않을 수 있으며 circling minimums가 게재되지 않는다. 조종사가 적절한 보호 구역 내에 있을 경우 circling minimums는 장애물 회피를 제공한다. 착륙 활주로를 향한 하강이 정상 기동 및 정상 강하율로 계속 진행될 수 있는 위치에 놓이기 전까지는 circling altitude 이상을 유지해야 한다. circling은 낮은 고도에서, 낮은 대기속도에서, 그리고 한계에 다다른 기상 조건에서 수행될 수 있다. 조종사는 정확한 circling maneuver를 결정하기 위해 훌륭한 판단력을 발휘해야 하고, 본인의 능력에 대한 깊이 있는 지식을 갖추어야 하며, 항공기 성능을 완전히 이해해야 한다. 왜냐하면 기상, 공항 구조, 그리고 항공기 위치∙고도∙대기속도가 모두 고려되어야하기 때문이다. 다음과 같은 기본 규칙들이 적용된다:
1. 현재 기상 조건을 고려하여 base leg나 downwind leg까지의 최단 경로를 비행한다. 공항이나 다른 활주로의 상공을 통과하는 것에 대한 제한사항은 없다.
2. 공항에서 다른 항적들이 비행중일 때 circling maneuvers가 이루어질 수 있음을 인지해야 한다. circling to land 시 standard left turns를, 혹은 관제사의 특정 지시를 고려해야 한다.
3. 관제탑이 없는 공항의 경우 wind and turn indicators를 확인하기 위해, 그리고 활주로나 공항 주변의 다른 항적을 확인하기 위해 공항 상공을 비행하는 것이 바람직할 수 있다.
4. missed approach point(MAP)는 접근 유형에 따라 달라진다. vertically guided approaches의 경우 MAP는 decision altitude/decision height에 위치한다. non-vertically guided procedure와 circling procedure는 동일한 MAP를 사용한다. 조종사는 fix∙NAVAID∙waypoint를 통해, 혹은 final approach fix로부터의 timing을 통해 MAP를 결정한다. GLS, localizer line of minima를 갖추지 않은 ILS, 혹은 LNAV line of minima를 갖추지 않은 RNAV(GPS) approach로부터의 circling은 금지된다.
g. Instrument Approach at a Military Field. 군 공항에서 민간 항공기가 계기접근을 수행하는 경우 공항을 관할하는 군사 기관이 승인하는 절차와 minimums를 따라 계기접근을 수행해야 한다.
a. 착륙이 이루어질 수 없다면 해당 사실을 ATC에 알린다. 그리고 접근 절차에서 규정하는 missed approach point에 도달하자마자 차트의 missed approach instructions를, 혹은 ATC가 명시한 alternate missed approach procedure를 수행해야한다.
b. 실패 접근을 위한 장애물 보호는 decision altitude/decision height(DA/DH)에서 시작되는 실패 접근을, 혹은 missed approach point에서 MDA 이상의 고도로 시작되는 실패 접근을 기초로 한다. 1NM 당 최소 200ft의 상승 구배(climb gradient)가 필요하다(단, 접근 차트의 notes section에 더 높은 상승 구배가 게재된 경우 제외). standard climb gradients보다 높은 값이 게재된 경우 non-standard climb의 종료 지점이 altitude나 fix로 지정된다. 조종사는 실패 접근 절차가 요구하는 상승 구배(feet per nautical mile로 표시)를 항공기가 충족할 수 있도록 사전 계획을 세워야 한다. 그리고 예상 ground speed보다 빠르게 비행할 경우 상승률(feet per minute) 조건이 증가한다는 점을 유의해야 한다. ground speed를 기준으로 상승 구배를 상승률로 변환하는 표가 U.S. Terminal Procedures booklets에 수록되어 있다. 정상적으로 기동할 경우 장애물로부터 충분한 여유가 제공된다. 허나 비정상적으로 일찌감치 수행된 선회가 고려되지는 않는다. 따라서 실패 접근을 일찌감치 시작할 경우 조종사는 선회 기동을 수행하기 전에 MDA나 DH 이상의 고도에서 missed approach point를 향해 IAP를 비행해야 한다(단, ATC가 달리 승인한 경우 제외).
c. 계기접근으로부터 circling-to-land를 수행하는 도중 시각 참조물을 놓친 경우 해당 절차의 missed approach를 반드시 따라야 한다(단, ATC로부터 alternate missed approach 절차를 명시 받은 경우 예외). 규정된 missed approach course에 설정되기 위해 조종사는 활주로를 향하여 상승 선회를 해야 한다. 그리고 missed approach course에 설정되기 전까지 선회를 계속해야한다. circling maneuver는 여러 방향에서 수행될 수 있으므로 missed approach course에 설정되기 위한 패턴은 항공기가 시각 참조물을 놓친 위치에 따라 달라질 것이다. 절차를 따를 경우 항공기가 circling obstruction clearance area와 missed approach obstruction clearance area 내를 유지하는데 도움을 제공할 것이다. MAP 이외의 지점에서 실패 접근을 시작한 경우의 수직 장애물 회피와 관련해서는 paragraph h를 참조한다. (그림 5-4-30 참조.)
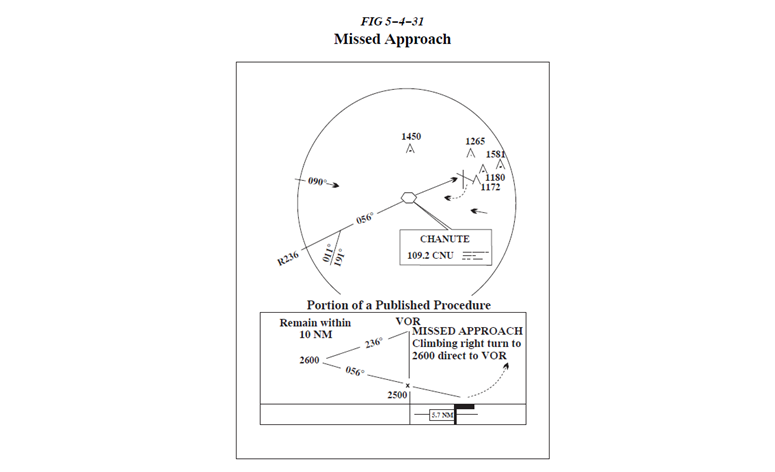
d. ATC 레이더 서비스가 제공되는 곳에서 ATC가 차트의 실패 접근 절차대신 radar vectors를 제공하는 경우 조종사는 이를 따라야 한다. (그림 5-4-31 참조.)
e. 일부 위치에서는 실패 접근 절차를 위한primary NAVAID가 사용될 수 없는 경우에 대비하여 alternate missed approach procedure를 갖출 수 있다. 혼란을 피하기 위해 alternate missed approach instructions는 차트에 게재되지 않는다. 허나 조종사 상황 인식을 위해, 그리고 ATC로 하여금 자세한 holding instructions를 발부하지 않도록 돕기 위해 alternate missed approach holding pattern은 접근 차트에 표시될 것이다. alternate missed approach는 접근 절차에 사용되지 않는, 혹은 primary missed approach에 사용되지 않는 NAVAID에 기초할 수 있다. alternate missed approach procedure가 NOTAM에 발부될 경우 이는 절차의 필수적인 부분이 된다. NOTAM은 절차를 수행하기 위한 지침과 필수 장비들을 명시할 것이다. 필요한 경우 관제사는alternate missed approach에 대한 instructions를 발부할 수 있다(예를 들어 접근 도중 primary missed approach NAVAID가 고장 난 경우). 접근을 시작한 후 alternate missed approach를 발부받은 경우 조종사는 alternate missed approach에 대한 ATC clearance를 거부할 수 있다. 그러나 접근을 시작하기 전에 alternate missed approach를 발부받은 경우 조종사는 전체 접근(alternate missed approach를 포함)을 받아들이거나, 다른 접근 절차를 요청하거나, 혹은 대체 방안(예를 들어 교체비행장으로 진행 등등)을 위해 ATC와 협조해야 한다.
f. 접근을 실패한 경우 특정 선택지를 위한 clearance를 요청한다(예를 들어 교체비행장, 다른 접근 등등.)
g. 조종사는 실패 접근 절차로부터 벗어나기 전에 안전 고도까지 상승하였는지를 확인해야 한다(특히 nonradar environments인 경우). 게재된 고도에 도달하기 전에 실패 접근 절차를 중단하는 것은 충분한 지형 회피를 제공하지 못할 수 있다. holding pattern에 도달한 후 IAF나 교체 비행장으로 향하기 전에 추가 상승이 필요할 수 있다.
h. 계기 접근 절차를 위한 clearance는 실패 접근 절차를 비행하는 clearance를 포함한다(단, ATC가 달리 지시한 경우 제외). 실패 접근 절차는 실패 접근이 missed approach point 이전/이상에서 수행될 경우에만 장애물 회피를 제공한다. 그리고 이는 200ft/NM(혹은 게재된 경우 그 이상)의 상승률을 가정한다. MDA나 DA(H) 미만에서, 혹은 circling approach 도중 missed approach point 이외의 지점에서 실패 접근을 수행할 경우 설령 missed approach 절차를 따른다 하더라도 장애물 회피가 제공되지 않으며 다른 항적과의 분리 또한 보장되지 않는다.
missed approach point 이외의 지점에서 balked(rejected) landing이 수행된 경우 조종사는 amended clearance를 받기 위해 최대한 빨리 ATC와 교신해야 한다. 만약 ATC와 교신할 수 없다면 조종사는 missed approach 구간을 다시 교차하도록 시도해야하며 route instruction과 altitude instruction을 준수해야 한다. ATC와 교신할 수 없는 상황이며 조종사 판단에 실패 접근 절차를 비행하는 것이 적절하지 않다 판단되면 visual conditions를 유지한 상태로 착륙을 다시 시도하거나(단, 가능한 경우), 혹은 공항 상공을 circle-climb을 할 것을 고려한다. 관제탑이 운영되지 않는 공항의 경우 항공 교통 시설과의 지속적인 교신이 불가능할 수 있다. 이때 실패 접근을 수행하는 경우 조종사는 지체 없이 go-around/missed approach 절차를 수행해야하며 최대한 빨리 ATC와 교신해야 한다.
계기 접근 절차를 수행하기 전에 조종사는 예상되는 기상 조건, 그리고 이용 가능한 항공기 성능을 고려하여 missed approach point 너머에서, 혹은 MDA나 DA(H) 이하에서 balked(rejected) landing을 할 때 취해야할 조치를 평가해야 한다. 14 CFR 91.175(e)는 조종사로 하여금 장애물 회피를 위해 실패 접근 절차를 비행하도록 인가한다. 허나 실패 접근 절차는 다른 항적과의 분리를 반드시 고려하지는 않는다. 조종사는 missed approach point로부터의 항공기 위치, 비행 방향, 그리고/혹은 실패 접근 절차에서의 minimum turning altitudes와 같은 요소들을 반드시 고려해야한다. 또한 조종사는 항공기 성능, visual climb restrictions, 차트에 표시된 장애물, obstacle departure procedure, nonstandard takeoff minima로 표시된 takeoff visual climb 조건, 예상되는 주변 항적, 혹은 접근 절차에 구체적으로 표시되지 않은 기타 요소들을 고려해야한다.
5-4-22. Use of Enhanced Flight Vision Systems(EFVS) on Instrument Approaches
a. Introduction. 계기 접근 도중 EFVS는 조종사로 하여금 접근 등화, runway environment와 관련된 시각 참조물, 그리고 자연 수평선만으로는 보이지 않을 수 있는 기타 물체나 특징들을 볼 수 있게 해준다. EFVS는 head-up display(HUD), 혹은 이에 상응하는 화면을 사용하여 비행 정보, 비행 기호(symbology), 항법 안내, 그리고 외부 광경의 실시간 이미지를 조종사에게 제공한다. HUD(혹은 이에 상응하는 화면)의 비행 정보, 항법 안내, 그리고 센서 이미지를 통해 조종사는 접근∙착륙∙rollout 도중 비행경로를 따라 전방을 계속 주시할 수 있다.
EFVS operation이란 시정 조건으로 인해 접근이나 착륙을 수행하기 위해선, enhanced flight visibility를 결정하기 위해선, required visual references를 식별하기 위해선, 혹은 rollout을 수행하기 위해선 자연 수평선 대신 EFVS를 사용해야 하는 운영이다.
1. EFVS operations to touchdown and rollout.
2. EFVS operations to 100 feet above the touchdown zone elevation (TDZE).
b. EFVS Operations to Touchdown and Rollout. 이는 DA나 DH 아래로 하강하여 touchdown 및 rollout을 수행하기 위해 육안을 사용하는 대신 EFVS가 제공하는 enhanced vision imagery를 사용하는 운영이다. (그림 5-4-32 참조.) 이러한 운영은 DA나 DH를 갖춘 SIAP(Standard Instrument Approach Procedures), 혹은 special IAP에서만 수행될 수 있다(예를 들어 precision approach나 APV approach). circling minimums를 갖춘 접근의 경우 EFVS operation to touchdown and rollout을 사용해서는 안 된다. EFVS operations to touchdown and rollout에 대한 규정은 14 CFR 91.176(a)에서 확인할 수 있다.
c. EFVS Operations to 100 Feet Above the TDZE. 이는 DA/DH나 MDA를 지나 TDZE로부터 100ft 지점으로 하강하기 위해 육안을 사용하는 대신 EFVS가 제공하는 enhanced vision imagery를 사용하는 운영이다. (그림 5-4-33 참조.) TDZE로부터 100ft 지점에서 하강을 계속하기 위해선 조종사는 자연 수평선을 사용하여 required visual references를 식별할 정도로 충분한 flight visibility를 가져야 한다. 그리고 enhanced flight visibility가 IAP의 시정 조건을 만족하는지를 확인하기 위해 EFVS를 계속 사용해야 한다. 이러한 운영은 DA나 DH를 갖춘 SIAP(Standard Instrument Approach Procedures), 혹은 special IAP에서만 수행될 수 있다. circling minimums를 갖춘 접근의 경우 EFVS operation to 100 feet above the TDZE을 사용해서는 안 된다. EFVS operations to 100 feet above the TDZE에 대한 규정은 14 CFR 91.176(b)에서 확인할 수 있다.
d. EFVS Equipment Requirements. 미국 등록 항공기에 설치된 EFVS를 사용하여 EFVS operations를 수행하는 경우 FAA-type design approval(즉, 형식 증명, 형식 증명의 개정, 혹은 부가형식증명)을 준수해야 한다. FAA-type design approval을 갖추지 않은 외국 등록 항공기가 EFVS operations를 수행하는 경우 ICAO Annex 6의 조건을 만족하기 위해 State of the Operator나 State of the Operator가 승인한 EFVS를 장비해야 한다. EFVS operations to touchdown and rollout을 위한 장비 조건은 14 CFR § 91.176(a)(1)에서 찾을 수 있다. EFVS operations to 100 feet above the TDZE를 위한 장비 조건은 14 CFR § 91.176(b)(1)에서 찾을 수 있다. 운영자는 Airplane Flight Manual이나 Airplane Flight Manual Supplement를 통해 그들의 항공기가 EFVS operations를 수행해도 되는지의 여부를 결정할 수 있다.
e. Operating Requirements. EFVS operations to touchdown and rollout(14 CFR § 91.176(a))을 수행하는 모든 운영자는 이러한 운영을 인가하는 OpSpec, MSpec, 혹은 LOA를 보유해야 한다. EFVS operations to 100 feet above the TDZE(14 CFR § 91.176(b))를 수행하는 part 91K, 121, 125, 129, 그리고 135 operators는 이러한 운영을 인가하는 OpSpec, MSpec, 혹은 LOA를 보유해야 한다. part 91 operators(91K operators 제외)의 경우 미국에서 EFVS operations to 100 feet above the TDZE를 수행하는데 LOA를 필요로 하지 않는다. 허나 외국 CAA(Civil Aviation Authorities)에서의 운영 인가를 용이하게 만들기 위해 optional LOA를 사용할 수 있다. Category II나 III 운영 도중 EFVS operation to touchdown and rollout을 수행하기 위해선 다음을 보유해야 한다:
1. EFVS operations to touchdown and rollout(14 CFR § 91.176(a))을 인가하는 OpSpec, MSpec, 혹은 LOA.
2. Category II operation이나 Category III operation을 승인하는 OpSpec, MSpec, 혹은 LOA.
f. EFVS Pilot Requirements. EFVS operations를 수행하는 조종사는 본인이 수행할 EFVS operation에 대한 지상 및 비행 훈련을 받아야 한다. 해당 훈련은 FAA가 승인한 훈련 프로그램을 통해 이루어져야 한다. 또한 최근의 비행 경험 조건, 그리고 기량 심사나 자격 심사 조건은 EFVS operations에 적용된다. 이러한 조건들은 14 CFR §§ 61.66, 91.1065, 121.441, Appendix F to Part 121, 125.287, and 135.293에서 다루어진다.
g. Enhanced Flight Visibility and Visual Reference Requirements. 14 CFR § 91.176(a)나 (b)에 따라 EFVS operations 도중 DA/DH, 혹은 MDA 아래로 하강하기 위해선 EFVS를 통해 확인한 enhanced flight visibility가 해당 IAP의 규정 값 이상인지를 결정해야 한다. 또한 14 CFR § 91.176(a)나 (b)가 요구하는 시각 참조물을 조종사가 명확하게 식별할 수 있어야 한다. enhanced flight visibility를 결정하는 것은 required visual references를 식별하는 것과 별개이다. 그리고 enhanced flight visibility는 ground-reported visibility와는 다르다. reported visibility, 혹은 육안으로 확인한 시정은 enhanced flight visibility보다 더 낮을 수도 있다. 허나 EFVS가 required enhanced flight visibility를 제공하며 조종사가 이 외의 모든 조건들을 만족한다면 EFVS를 사용하여 DA/DH나 MDA 미만으로 하강을 계속할 수 있다. 항공기가 접근 및 착륙을 계속할 수 있는 위치에 있음을 보장하기 위해선 적절한 enhanced flight visibility가 필요하다. EFVS를 사용한다 하여 IAP에서 명시된 DA/DH/MDA나 visibility가 더 낮아지는 것은 아님을 이해해야 한다. EFVS는 IAP의 visual segment를 운영하는 또 다른 수단을 제공할 뿐이다. IAP에 명시된 DA/DH/MDA와 visibility 값은 변화하지 않는다.
h. Flight Planning and Beginning or Continuing an Approach Under IFR. EFVS operations를 위한 part 121, 125, 혹은 135 operator의 OpSec이나 LOA는 EFVS operation credit을 인가할 수 있다. DA/DH나 MDA에 도달하였다면 조종사는 14 CFR § 91.176(a)/(b)에 따라, 그리고 그들의 EFVS operations 수행 권한에 따라 EFVS operations를 수행한다.
i. Missed Approach Considerations. EFVS operation을 수행하기 위해선 EFVS가 반드시 작동 가능해야 한다. 접근 도중 EFVS의 필수 구성 요소가 고장 난 경우 실패 접근을 수행해야 한다. 허나 접근을 계속하는 것이 더 안전한 조치라 판단한 경우 조종사는 접근을 계속할 수 있다.
j. Light Emitting Diode(LED) Airport Lighting Impact on EFVS Operations. 일부 공항에서는 threshold lights, taxiway edge lights, taxiway centerline lights, low intensity runway edge lights, windcone lights, beacons, 그리고 일부 obstruction lighting이 백열등에서 LED로 교체되었다. 또한 현재 approach lighting systems의 백열등을 LDE로 대체할 계획이 있다. infrared-based EFVS의 경우 LED lights를 감지할 수 없음을 조종사는 알아야 한다. 또한 현재 FAA는 LED lighting이 설치된 위치에 대한 정보를 배포하지 않는다.
k. Other Vision Systems. 14 CFR § 91.176의 장비 조건을 만족하는 EFVS와 달리 SVS(Synthetic Vision System)이나 SVGS(Synthetic Vision Guidance System)은 외부 광경의 실시간 센서 이미지를 제공하지 않는다. 이들은 또한 EFVS operations를 위한 장비 조건도 만족하지 않는다. 조종사는 DA/DH/MDA 미만으로 하강하기 위해 head-up display나 head-down display의 synthetic vision image를 사용할 수 없다. 허나 EFVS가 SVS와 통합될 수 있으며 이를 CVS(Combined Vision System)이라 부른다. EFVS를 위한 모든 조건들이 충족되며 SVS 이미지가 외부 광경을 바라볼, required visual reference를 식별할, 혹은 센서 이미지를 바라볼 조종사 능력을 방해하지 않는다면 EFVS operations를 수행하기 위해 CVS를 사용할 수 있다.
l. Additional Information. EFVS를 위한 운영 기준은 Advisory Circular (AC) 90−106, Enhanced Flight Vision System Operations에서 확인할 수 있다. 그리고 EFVS를 위한 감항성 기준은 AC 20−167, Airworthiness Approval of Enhanced Vision System, Synthetic Vision System, Combined Vision System, 그리고 Enhanced Flight Vision System Equipment에서 확인할 수 있다.
a. visual approach는 IFR 비행계획서에서 수행된다. 이는 조종사가 공항을 향해 육안으로, 그리고 구름으로부터 개방된 상태로 진행할 수 있도록 승인한다. 조종사는 공항이나 선행 항공기를 시야에 확보해야 한다.이 접근은 적절한 항공 교통 관제 시설로부터 승인 및 관제되어야 한다. 보고된 기상은 ceiling 1,000ft 이상 및 visibility 3miles 이상이어야 한다. 운영상 이로운 경우 ATC는 이러한 유형의 접근을 승인할 수 있다. visual approach는 VMC에서 IFR 하에 수행되는 IFR 절차이다. 14 CFR Section 91.155의 구름 회피 조건은 적용되지 않는다(단, 운영 기준(operations specification)이 요구하는 경우 제외). visual approach 수행 시 조종사는 활주로와의 가로 정렬 및 수직 정렬을 위해 항법 보조 장치를 사용하도록 권장된다.
b. Operating to an Airport Without Weather Reporting Service. 목적지 공항의 기상을 이용할 수 없는 경우 ATC는 이를 조종사에게 알려준다. 공항의 기상이 ceiling 1,000ft이상 및visibility3miles 이상이라는 합리적 확신이 있다면(예를 들어 area weather reports, PIREPs, 등등) ATC는 visual approach를 시작할 수 있다.
c. Operating to an Airport With an Operating Control Tower. 선행 항공기가parallel runway, intersecting runway, 혹은 converging runway에 IFR 접근이나 VFR 접근을 수행할 때 다른 활주로를 향하여 visual approach를 수행하도록 인가될 수 있다. ATC는 다른 항적이 다른 활주로를 향하여 접근을 수행하고 있음을 관련 항공기들에게 알린 후 visual approach를 승인할 수 있다. 동시 접근이 이루어지고 있음은 ATIS를 통해 방송될 수 있다.
1. 2,500ft 미만으로 분리된 parallel runways를 운영하는 경우 ATC는 approved separation을 보장한다(단, 후속 항공기가 선행 항공기를 확인하였다 보고하였으며 visual separation이 적용되는 경우 제외).
2. 2,500 ~ 4,300ft로 분리된 parallel runways를 운영하는 경우 ATC는 approved separation을 보장한다(단, 항공기들에게 approach clearance가 발부되었으며 한 명의 조종사가 visual approach clearance를 수신하였음을 acknowledge 하였고, 다른 한 명의 조종사는 instrument approach clearance나 visual approach clearance를 수신하였음을 acknowledge 하였으며 항공기들이 활주로의 연장선을 30도 이하로 교차하는 heading, direct course, 혹은 RNAV/instrument approach procedure에 설정되기 전까지).
3. 4,300ft 이상으로 분리된 parallel runways를 운영하는 경우 ATC는 approved separation을 보장한다(단, 항공기에게 visual approach clearance가 발부되었고 조종사가 이를 acknowledge 하였으며 항공기들이 활주로의 연장선을 30도 이하로 교차하는 heading, direct course, 혹은 RNAV/instrument approach procedure에 설정되기 전까지).
NOTE-
30도 이하의 교차 각도는 final에서의 overshoot 가능성을 줄이기 위해, 그리고 선회 도중 하나 이상의 항공기가 belly-up configuration으로 나란히 운영되는 것을 방지하기 위함이다.
d. Clearance for Visual Approach. 관제탑이 운영되는 위치의 경우 ATC는 활주로가 포함된 approach clearances를 발부한다. 관제탑이 운영되지 않는 위치의 경우, 혹은 시간제 관제탑의 운영 시간이 종료된 위치의 경우 ATC는 공항 명칭만이 포함된 approach clearance를 발부한다.
e. Separation Responsibilities. 조종사가 공항을 확인하였지만 전방 항공기는 확인할 수 없는 경우에도 ATC가visual approach를 승인할 수 있다. 단, ATC가 항공기 분리 책임과 항적 난기류 분리 책임을 가진다. 전방 항공기를 육안으로 뒤따를 때 visual approach clearance를 수락하였다면 안전한 접근 간격과 충분한 항적 난기류 분리를 유지하는 것은 조종사의 책임이다.
f. visual approach는 IAP가 아니다. 따라서 missed approach segment가 없다. 관제 공항을 운영하는 항공기가 복행을 수행해야 하는 경우 관제탑은 해당 항공기가 장주 패턴으로 진입하도록, 혹은 달리 지시한대로 진행하도록 clearance나 instruction을 발부한다. 어떤 경우이든 만약 ATC가 고도를 할당하였다면 해당 고도에 도달하기 전까지는 지형 및 장애물 회피를 유지할 책임이 조종사에게 있다. 이후 ATC는 다른 IFR 항적과의 approved separation이나 visual separation을 제공한다. 비관제 공항의 경우 항공기는 구름으로부터 개방된 상태로 최대한 빨리 착륙을 완료해야 한다. 만약 착륙이 불가능하다면 구름으로부터 개방된 상태로 최대한 빨리 ATC에 교신한 다음 further clearance를 요청한다. 그래야만 다른 IFR 항적과의 분리가 유지된다.
g. visual approaches는 조종사/관제사의 업무량을 줄여준다. 그리고 공항으로 향하는 비행경로가 단축됨으로써 항적이 신속하게 처리된다. visual approach를 원하지 않는다면 조종사는 최대한 빨리 ATC에 알려야 한다.
h. visual approach를 수행하도록 승인하는 것은 IFR 인가이다. 이는 IFR 비행계획서를 취소해야하는 조종사의 책임을 변화시키지 않는다.
a. CVFP는 visual approach를 차트에 표시한 것이다. 이는 환경/소음 고려사항을 위해, 그리고/혹은 항공 교통 운영의 안전성과 효율성을 위해 필요한 경우에 설정된다. 접근 차트는 특정 활주로로 향하는 주요 랜드마크, 경로, 그리고 권장 고도를 표시한다. CVFP는 주로 터보제트 항공기에서 사용되도록 설계되었다.
b. 이러한 절차는 관제탑이 운영 중인 공항에서만 사용된다.
c. 대부분의 접근 차트는 몇몇 NAVAID 정보를 표시한다. 이는 항법 안내를 보조하기 위한 것이다.
d. 차트에 표시된 모든 고도들은 소음 방지를 위한 것이며 권장 고도이다(단, Class B 공역의 하단을 표시하는 경우는 제외). 운영상 조건이 지시하는 경우에는 권장 고도 이외의 고도를 비행할 수 있다.
e. 항법에 사용되는 랜드마크가 야간에 보이지 않는 경우에는 접근에 “PROCEDURE NOT AUTHORIZED AT NIGHT”라 표시된다.
f. CVFP는 보통 공항으로부터 20마일 이내에서 시작된다.
g. CVFP를 위한 기상 최저치는 차트에 표시된 권장 고도가 아닌 minimum vectoring altitudes를 기반으로 한다.
h. CVFP는 계기 접근이 아니므로 missed approach segments를 가지지 않는다.
i. 기상이 minimum 미만이면 ATC는 CVFP를 위한 clearance를 발부하지 않는다.
j. 조종사가 차트의 랜드마크나 선행 항공기를 확인하였다 보고하면 ATC는 CVFP를 승인한다. 선행 항공기를 따르도록 지시받은 조종사는 안전한 접근 간격과 항적 난기류 분리를 유지할 책임이 있다.
k. 접근을 계속할 수 없거나 선행 항공기가 보이지 않는다면 조종사는 이를 ATC에 알려야 한다. missed approach는 go-around처럼 처리된다.
l. visual approach 수행 시 특정 활주로와의 가로 정렬과 수직 정렬을 위해 이용 가능한 항법 보조 장치들을 사용하도록 권장된다.