Emergency Procedures
Introduction
변화하는 기상 조건, ATC(air traffic control), 항공기, 그리고 조종사는 계기 비행을 예측 불가능하게 만드는 변수들이다. 비행의 안전은 이러한 변수들을 관리하는, 그리고 항공기 제어 및 충분한 상황인식을 유지하는 조종사의 능력에 달려있다. 이 장은 악기상, 항공기 시스템 오작동, 교신/항법 시스템 오작동, 상황 인식 손실, 그리고 IIMCs(inadvertent instrument meteorological conditions)와 관련된 비상 상황을 인지 및 해결하는 방법에 대하여 설명한다.
Emergencies
emergency는 distress condition이거나 urgency condition일 수 있다. distress는 심각한 위험 상태이므로 즉각적인 도움을 필요로 하는 상태로 정의된다. urgency는 비행의 안전이 우려되므로 시기적절한 지원을 필요로 하는 상태로 정의된다(즉, 이는 잠재적으로 distress condition임).
조종사는 distress conditions(예를 들어 화재, 기계적 고장, 혹은 구조적 손상)를 직면하였을 때 즉시 emergency를 선언한다. 허나 몇몇 조종사들은 당장 위험하지는 않으나 잠재적으로 위험할 수 있는 상황에 직면하였을 때 urgency condition을 보고하기를 꺼려한다. 조종사가 항공기 위치, 연료량, 기상, 혹은 기타 조건에 대하여 의구심이 발생한 순간 항공기는 urgency condition에 처하게 된다. 조종사는 긴급 상황이 발생할 가능성이 있거나 이미 발생하였을 때 지원을 요청해야 한다(이러한 상황이 distress로 발전한 후에는 너무 늦다).
PIC(pilot in command)는 항상 승무원, 승객, 그리고 항공기 운항에 대한 책임을 가진다. 14 CFR part 91.3에 따라 PIC는 emergency 도중 규정들로부터 벗어날 수 있다. 이는 모든 사람들의 안전을 보장하기 위하여 PIC가 최선의 결정을 내릴 수 있게 만들기 위함이다. 또한 emergency를 선언할 경우 해당 항공기는 착륙을 위한 우선권을 갖는다. 어떤 이유로든 안전에 대하여 불안감이 드는 조종사는 즉시 지원을 요청해야 한다. 이러한 지원은 라디오, 레이더, DF(direction finding) stations, 그리고 다른 항공기의 형태로 제공된다.
Inadvertent Thunderstorm Encounter
조종사는 의도적으로 뇌우를 통과하는 것을 피해야 한다. 허나 의도치 않게 뇌우를 마주할 수 있는 특정 상황들이 존재할 수 있다. 예를 들어 큰 구름 속에 숨겨진 뇌우 지역을 비행하는 경우에는 뇌우를 회피하는 것이 어려울 수 있다(설령 항공기가 뇌우 탐지 장비를 갖추고 있다 하더라도). 조종사는 의도치 않은 뇌우 통과에 대처할 준비가 되어 있어야 한다. 뇌우를 만날 경우 항공기는 최소한 severe turbulence를 경험할 수 있다. 조종사는 안전벨트를 단단히 매야하며 조종실 내의 모든 물건들을 단단히 고정해야 한다.
가장 먼저 해야 할 일은 항공기를 조종하는 것이다. 조종사의 업무량이 많아지므로 계기 스캔을 위해 더 높은 집중력이 필요하다. 뇌우에 진입한 후에는 뒤로 돌아서기보다는 직진하는 것이 좋다. 직진 경로를 통해 가장 짧은 시간 내에 위험으로부터 벗어날 수 있다. 선회 기동은 항공기의 구조적 응력을 증가시킬 뿐이다.
recommended turbulence penetration speed가 유지되는 출력을 설정한 다음 출력 조정을 최소화하려고 노력한다. 항공기가 수평 자세를 유지하도록 집중하되 대기속도와 고도가 변화하는 것을 허용한다. autopilot을 사용하는 경우에는 altitude hold mode와 speed hold mode를 해제한다. 왜냐하면 이는 항공기 기동을 증가시켜 구조적 응력을 증가시키기 때문이다.
뇌우 통과 도중 착빙의 가능성 또한 존재한다. 항공기가 anti-icing/deicing 장비를 갖추고 있다면 최대한 빨리 이를 켠다. 착빙이 어느 고도에서든 빠르게 발생할 수 있다. 이는 출력 손실 및/혹은 대기 속도 지시 상실로 이어질 수 있다. 뇌우 내에는 번개 또한 존재한다. 이는 순간적으로 조종사의 눈을 멀게 할 수 있다. 이러한 위험을 줄이기 위해선 조종실 조명을 최대 밝기로 켜고, 계기들에 집중하고, 바깥을 보지 않는다.
Inadvertent Icing Encounter
착빙은 예측 불가능하다. 따라서 조종사들은 착빙을 피하기 위한 모든 조치를 취했음에도 불구하고 착빙 상황에 직면할 수 있다. visible moisture를 운항하는 동안 이러한 가능성을 대비하기 위해선 OAT(outside air temperature)를 모니터링 해야 한다.
anti-icing/de-icing 장비는 비행 안전에 매우 중요하다. 많은 얼음이 쌓이기 전에 anti-icing/de-icing 장비가 사용되지 않을 경우 모든 얼음이 제거되지 못할 수도 있다. 조종사는 anti-icing/de-icing 장비 사용 방법에 대하여 매뉴얼을 숙지해야 한다.
섭씨 5도 이하의 온도에서 visible moisture에 진입하기 전에 anti-icing/de-icing 장비를 켠다. 얼음을 조기에 발견하는 것은 매우 중요하다. 야간 비행 도중에는 얼음을 감지하기가 어려울 수 있다. 조종사는 손전등을 사용하여 wings, fuselage, landing gear, 그리고 horizontal stabilizer에 얼음이 쌓여있는지를 확인해야 할 수 있다. 얼음 축적이 발견되면 조종사는 착빙 조건을 피하기 위한 조치를 취해야 한다. 조치를 위한 선택지들은 다음과 같다:
∙기온이 훨씬 낮은 고도로 이동한다.
∙영상 온도인 고도로 이동한다.
∙visible moisture가 없는 영역으로 이동한다.
∙known non-icing conditions로 이동한다.
이러한 선택지들을 사용할 수 없다면 가장 가까운 적절한 공항에 즉시 착륙하는 것을 고려한다. anti-icing/de-icing 장비는 착빙 조건에서 항공기가 무한정 운항할 수 있도록 허용하지 않는다. 이는 착빙 조건을 회피할 수 있는 시간을 더 많이 제공할 뿐이다. 착빙이 발생한 경우 landing configuration에서의 항공기 조종성 점검이 고려되어야 한다. 외장 변화를 신중하게 고려하라. 이는 예상치 못한 비행 역학을 만들어낼 수도 있다.
Precipitation Static
강수 공전은 항공기에 축적된 정전기가 항공기 끝단으로부터 방전될 때 발생한다. 이러한 방전은 항공기 계기에 문제를 일으킬 수 있다. 이러한 문제는 심각한 문제(예를 들어 VHF 교신 상실 및 부정확한 나침반 지시)에서 성가신 문제(예를 들어 오디오 소음)까지 다양하다.
비행 중인 항공기가 공기 중의 입자(예를 들어 비나 눈)를 만나 음전하가 발생할 경우 강수 공전이 발생한다. 이는 뇌우 구름의 대기 전기장으로 인해 발생할 수도 있다. 상당한 음전압에 도달하면 항공기는 이를 방전시켜 전기적 장애를 발생시킨다. 강수 공전과 관련된 문제를 줄이기 위해 조종사는 항공기의 static wicks를 확인해야 한다. 부러지거나 사라진 static wicks를 계기 비행 전에 모두 교체해야 한다.
Aircraft System Malfunction
in-flight emergency로 이어질 수 있는 항공기 시스템 고장을 예방하는 것은 철저한 비행 전 점검에서 시작된다. IFR(instrument flight rules) 비행을 수행하려는 조종사는 VFR(visual flight rules) 비행 전에 일반적으로 점검되는 항목들 외에도 antennas, static wicks, anti-icing/de-icing equipment, pitot tube, 그리고 static ports에 주의를 기울여야 한다. taxi 도중 모든 계기들의 작동 및 정확도를 확인해야 한다. 조종사는 IFR conditions로 출항하기 전에 모든 시스템들이 제대로 작동하는지를 확인해야 한다.
Generator Failure
generator failure는 항공기에 따라 서로 다른 방식으로 표시된다. 일부 항공기는 ammeter를 사용한다. 이는 배터리의 충전 상태나 방전 상태를 나타낸다. ammeter가 양(+)의 값을 지시하는 경우 이는 충전 상태임을 나타낸다. ammeter가 음(-)의 값을 지시하는 경우 이는 방전 상태임을 나타낸다. 다른 항공기는 generator가 전달하는 부하를 나타내기 위해 load meter를 사용한다. generator 고장이 발생한 경우 load meter에 0이 표시된다. 항공기에 설치된 시스템 유형에 대한 정보는 매뉴얼을 참조한다.
generator 고장이 확인된 경우 조종사는 배터리의 전기 부하를 줄인 다음 실현 가능한대로 착륙해야 한다. 배터리의 상태와 전기 부하에 따라 1시간 이상 비행할 수 있는 전력이 공급될 수도 있고 단 몇 분 동안의 전력만이 공급될 수도 있다. 조종사는 전기를 필요로 하는 시스템을, 그리고 전력 없이도 작동하는 시스템을 잘 알고 있어야 한다. 여러 개의 generators를 갖춘 항공기의 경우 아직 작동 중인 generator에 과부하가 걸리지 않도록 전기 부하를 줄여줘야 한다. 조종사는 매뉴얼에서 명시하는 절차에 따라 generator 고장 문제를 해결하려 시도할 수 있다. generator가 리셋 되지 않는 경우 ATC에게 electrical failure가 임박하였음을 알려야 한다.
Instrument Failure
계기 고장이나 시스템 고장은 warning indicator를 통해, 혹은 attitude indicator∙supporting performance instruments∙다른 pilot station에 배치된 계기들과의 불일치를 통해 식별된다. 고장 난 구성 요소를 식별하고 cross-check을 빠르게 수행하는 동안 항공기 제어를 유지해야 한다. 이러한 문제는 별도의 계기 고장일 수도 있고, 혹은 여러 계기에 영향을 미치는 시스템의 고장일 수도 있다.
이를 식별하는 방법 중 하나는 attitude indicator를 rate-of-turn indicator 및 VSI(vertical speed indicator)와 비교하는 것이다. 이러한 방법은 pitch-and-bank 정보를 제공함에 따라 static system을 electrical system 및 pressure system과 비교한다. 고장 난 구성 요소를 식별한 다음 나머지 계기들을 통해 항공기 제어를 유지한다. 전원을 확인하고, 백업 시스템으로 변경하고, 가능하다면 계기를 리셋 하여 고장 난 구성 요소를 복원한다. 고장 난 계기를 가리면 항공기 제어 및 항법을 유지하는 능력이 향상될 수 있다. 이러한 문제를 ATC에 알려야 한다. 그리고 필요하다면 상황이 악화되기 전에 emergency를 선언해야 한다.
Pitot/Static System Failure
pitot/static system 고장은 불규칙한, 그리고 신뢰할 수 없는 계기 지시를 유발할 수 있다. static system 문제가 발생할 경우 이는 airspeed indicator, altimeter, 그리고 VSI에 영향을 미친다. 비여압 항공기가 alternate static source를 갖추지 않은 경우 조종사는 VSI의 유리를 깨뜨릴 수 있다. 왜냐하면 해당 계기는 계기 비행에 필요하지 않기 때문이다. 유리를 깨면 altimeter와 airspeed indicator에 static pressure가 제공된다. 허나 유리를 깨면 추가적인 계기 오차가 발생할 수 있으므로 주의해야 한다. 이를 고려하기 전에 조종사는 static 문제에 대한 항공기의 특정 절차를 숙지해야 한다.
Loss of Situational Awareness(SA)
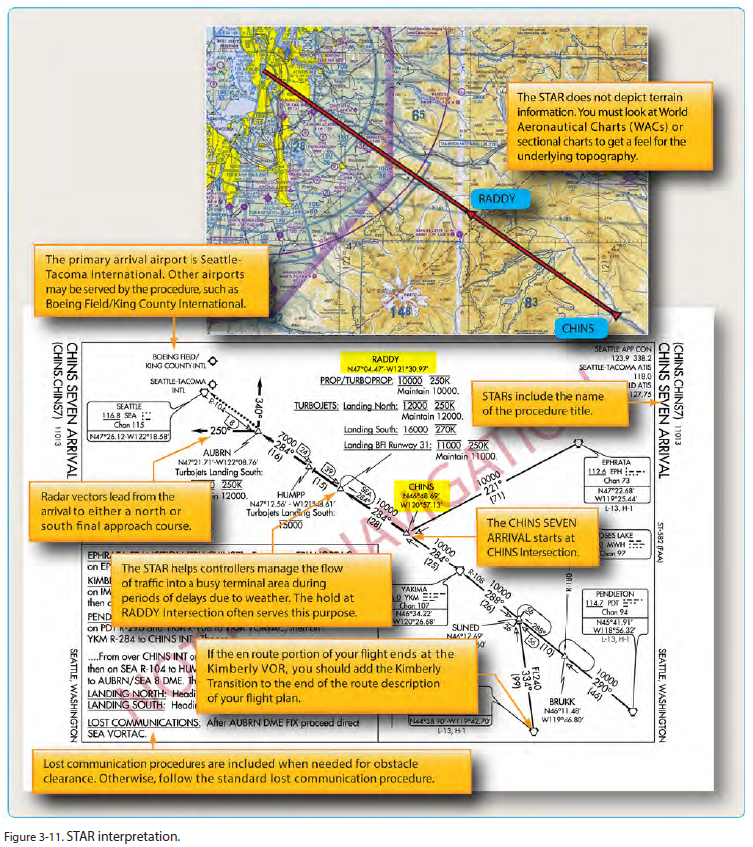
상황인식은 환경 요소들에 대하여, 그리고 환경 요소들이 비행에 미치는 영향에 대하여 전반적으로 평가하는 것이다. 상황인식을 통해 조종사는 미리 결정을 내릴 수 있으며 어려 가지 선택지들을 평가할 수 있다. 반면 비행에 대한 중요한 정보를 놓치는 조종사는 사후 대응적 결정을 내리기 쉽다. 상황인식이 부족하다는 것은 조종사가 미래 상황에 대한 시야가 부족함을 의미한다. 이로 인해 조종사는 제한된 선택들과 함께 빠른 결정을 내려야 하는 경우가 많아진다. IFR 비행 도중 조종사는 다양한 수준의 상황인식과 함께 비행한다. 예를 들어 목적지로 향하던 도중 조종사가 높은 수준의 상황인식을 유지하고 있다. 이때 ATC가 예상치 못한 STAR를 발부하였다. 조종사는 해당 절차에 익숙하지 않았고 그 결과 상황인식이 감소하였다. 허나 STAR에 익숙해지고 정상 항법을 재개한 후에는 다시 높은 수준의 상황인식으로 되돌아갔다.
상황인식을 감소시키는 요인들로는 주의 산만, 비정상적이거나 예상치 못한 상황, 안일함, 높은 업무량, 익숙하지 않은 상황, 그리고 작동하지 않는 장비 등이 있다. 경우에 따라 상황인식 손실이 조종사의 통제 범위를 벗어날 수도 있다. 전기 시스템 고장으로 인한 자세계가 손실로 인하여 조종사는 항공기가 unusual attitude를 취하고 있음을 발견할 수 있다. 이 경우 정해진 절차를 통해 항공기 제어를, 그리고 상황인식을 회복한다. 특히 조종사는 사후 대응적 결정으로 인해 상황인식이 손실되는 것을 경계해야 한다. 상황인식을 회복하기 위해선 상황을 재평가하고 문제가 무엇인지 파악하기 위해 노력해야 한다. 조종사는 다른 출처들(예를 들어 항법 계기, 다른 조종사, 혹은 ATC)로부터 추가 정보를 얻어야 할 수도 있다.
Inadvertent Instrument Meteorological Condition(IIMC)
일부 조종사들은 IIMC가 IFR 비행에서는 적용되지 않는다 오해한다. 다음은 조종사가 의도치 않게 IMC에 진입할 수 있는 상황들이다.
1. IAP(instrument approach procedure) 도중에는 VMC(visual meteorological conditions)이였으나 circling to land를 수행할 때 IMC를 조우한 경우.
2. 비정밀 접근 도중 MDA에서 수평을 잡았을 때 overcast 구름 바로 아래였으며 VMC였다. 이때 항공기가 다시 구름으로 진입하였다. 이는 조종사가 고도를 정확하게 유지하지 못하여 구름으로 상승하였기 때문에, 혹은 구름이 아래쪽으로 경사져 있어서 MDA를 유지하는 동안 항공기가 다시 구름에 진입하였기 때문이다.
3. 의도치 않게 구름에 진입한 경우 조종사는 항공기 제어를 유지하고, holding fix를 향해 기동해야 하며, ATC에 교신해야 한다. 항법 수단이나 상황인식이 손실된 경우 조종사는 MSA로 상승해야 한다.
IIMC에서 살아남기 위해선 조종사는 상황의 심각성을 인지해야 한다. 조종사는 즉시 계기에 전념한 다음 적절한 회복 절차를 수행해야 한다.
Maintaining Aircraft Control
상황을 인지한 후 조종사는 계기를 통해 항공기를 제어해야 한다. 바깥을 육안으로 확인하려 시도할 경우 spatial disorientation이나 loss of control로 이어질 수 있다. 조종사는 시각 참조물을 설정하려 노력하는 대신 계기를 통해 항공기를 비행해야 한다.
항공기 제어 유지와 함께 가장 중요한 것은 즉시 상승하는 것이다. 즉각적인 상승을 통해 장애물로부터 더 멀리 떨어질 수 있을 뿐만 아니라 ATC의 레이더 수신도 개선된다. 즉각적인 상승은 현재 상황, 환경, 그리고 장애물에 적합하게 수행되어야 한다. 아래에는 IIMC 이후 항공기 제어를 유지하는데 도움이 되는 절차가 나열되어 있다. 가장 중요한 것은 절차를 수행하는 동안 IIMC를 알린 다음 상승을 시작하는 것이다. 다음 절차들은 거의 동시에 수행된다:
∙Attitude – 날개 수평을 만든다.
∙Heading – heading을 유지한다(장애물 회피를 위해 필요한 경우에만 선회한다).
∙Power – 원하는 상승률에 맞춰 출력을 조정한다.
∙Airspeed – 필요한 경우 대기속도를 조절한다.
계기 기동을 수행하는 동안 IIMC가 발생한 경우 가장 좋은 해결책은 실패 접근을 수행하는 것이다.
조종사는 항공기 자세와 관련하여 직관이나 시각적 해석 대신 계기를 믿어야 한다. 전정 감각(내이의 움직임 감지)은 조종사에게 혼란을 줄 수 있다. 관성으로 인하여 내이는 항공기 자세의 미세한 변화를 감지할 수 없으며 시간에 따라 일정한 속도로 발생하는 자세 변화도 정확하게 감지할 수 없다. 오히려 잘못된 감각으로 인해 항공기 자세가 바뀌지 않았음에도 불구하고 자세가 바뀌었다 믿게 되어 공간정위상실로 이어질 수 있다.
ATC Requirements During an In-Flight Emergency
in-flight emergency 도중 조종사는 ATC로부터 도움을 얻을 수 있다. 조종사는 ATC가 제공하는 서비스를, 그리고 이용 가능한 선택지들을 알아야 한다. 이러한 서비스를 통해 조종사는 항공기 제어에 더 집중할 수 있으며 더 나은 결정을 내릴 수 있다.
Provide Information
emergency 도중 조종사는 최대한 많은 정보를 ATC에 제공해야 한다. 이러한 정보를 통해 ATC는 어떤 종류의 지원을 제공할 수 있는지를 결정한다. 정보에 대한 조건은 상황에 따라 다르다. in-flight emergency에 대해 ATC는 최소한 다음 정보를 요구한다:
∙항공기 식별부호 및 형식.
∙발생한 상황.
∙조종사의 요구 사항.
시간과 상황이 허락한다면 조종사는 ATC에게 추가 정보를 제공해야 한다. 다음은 ATC로 하여금 조종사를 더욱 지원하는데 도움이 될 수 있는 추가 정보들이다.
∙항공기 고도.
∙출발지 및 목적지.
∙대기속도.
∙남은 연료(시간 단위).
∙마지막으로 알고 있던 heading.
∙눈에 보이는 랜드마크.
∙수신하는 NAVAID(Navigational aids) 신호.
∙마지막으로 알고 있던 시간 및 위치.
∙항공기 색깔.
∙기상.
∙항공기에 탑재된 비상 장비.
∙탑승 인원의 수.
∙IFR 비행에 대한 조종사의 역량.
∙항법 장비 기능.
조종사가 요청할 경우, 혹은 ATC에 의해 필요하다 판단된 경우 ATC는 FAA가 운영하는 레이더 시설과 DF 시설의 서비스를 요청할 수 있다. 또한 ATC는 다른 기관들(예를 들어 USCG와 기타 지방 당국)에 긴급 서비스를 요청할 수도 있다.
Radar Assistance
레이더는 emergency 상황인 조종사가 사용할 수 있는 귀중한 자산이다. ATC는 레이더를 통해 항공기에게 항법 지원을 제공하며 emergency 도중 항공기의 last-known location을 제공할 수 있다. VFR 항공기가 IMC weather conditions에 직면하였거나 직면하기 직전인 경우 조종사는 VFR airports나 VFR conditions로 향하는 radar vectors를 요청할 수 있다. 조종사가 계기 한정 자격을 가지고 있으며 항공기가 IFR 비행을 수행할 수 있다 판단하였다면 IFR 비행계획서를 제출한 다음 ATC에 목적지 공항으로 향하는 clearance를 요청해야 한다. 항공기가 이미 IFR conditions에 진입하였다면 ATC는 적절한 terrain/obstacle clearance minimum altitude를 알려줄 수 있다. 항공기가 terrain/obstacle clearance minimum altitude 아래에 있을 때 레이더 식별이 완료되었거나, 혹은 정확한 위치 정보를 수신하였다면 ATC는 terrain/obstacle clearance minimum altitude로 상승할 수 있는 heading이나 radial을 제공할 수 있다.
Emergency Airports
ATC는 emergency airport 추천 시 기상 조건, 그리고 공항까지의 거리와 관련하여 남은 연료의 양을 고려한다. 조종사에게 발생한 상황에 따라 특정 기상 현상이 가중적으로 고려되어야 할 수도 있다. 조종사는 IFR conditions가 존재하는 가까운 공항 대신 VFR conditions가 존재하는 먼 공항에 착륙하는 것을 선택할 수 있다. 기타 고려 사항으로는 공항 상태, NAVAID 상태, 항공기 형식, 조종사 자격, 그리고 emergency airport로 향하는 vectoring/homing 역량이 있다. 또한 ATC와 조종사는 emergency airport로 비행하는데 사용될 수 있는 guidance를 결정해야 한다. 다음과 같은 선택지들을 이용할 수 있다:
∙레이더.
∙DF.
∙다른 항적을 뒤따르기.
∙NAVAIDs.
∙랜드마크 지문항법(pilotage).
∙compass headings.
Emergency Obstruction Video Map(EOVM)
EOVM은 terrain/obstacle clearance minimum altitude가 유지될 수 없는 emergency 상황 도중 조언 업무를 용이하게 만들기 위해 고안되었다. EOVM은 다음 조건에서만 사용된다:
1. 조종사가 emergency를 선포한 경우.
2. 조종사가 terrain/obstacle clearance minimum altitude를 유지할 수 없어서 emergency 상황이 존재하거나 임박하였다 관제사가 판단한 경우.
Note: terrain/obstacle clearance minimum altitude는 MIA, MEA, MOCA, 혹은 MVA로 규정될 수 있다.
emergency vectoring service 제공 시 관제사는 다음을 조종사에게 알려준다: 발부되는 모든 headings는 항공기를 낮은 지형/장애물로 향하도록 만드는 조언이다. EOVM에 표시되는 고도와 장애물은 장애물/지형의 실제 고도 및 위치이며 장애물 간격을 위한 lateral buffer나 vertical buffer는 포함되지 않는다.
Responsibility
조난(distress) 항공기와 교신하는 ATC는 비상 상황을 처리해야하며 지원 시설들의 활동들을 지휘해야 한다. 다른 시설이 현 상황을 더 잘 처리할 수 있는 경우가 아닌 한 ATC는 이러한 책임을 다른 시설로 이전하지 않는다. 조난 항공기에 대한 정보를 수신한 경우 ATC는 자세한 정보를 center로 전달한다. center는 정보를 수집하고, SAR(search and rescue)와 협조하며, 적절한 기관에 정보를 배포하는 중심지 역할을 한다.
121.5MHz와 243.0MHz는 비상 주파수이다. 허나 조종사는 마지막으로 교신하였던 주파수를 유지해야 한다. 조종사는 적절한 이유가 있는 경우에만 주파수를 변경해야 한다. 필요한 경우, 그리고 기상 조건과 상황이 허락하는 경우 ATC는 교신, 레이더, 혹은 DF 수신을 개선하기 위하여 고도를 상승하라 권장한다.
Escort
escort aircraft는 적절한 대형을 고려 및 평가해야 한다. 기동 시 항공기가 구름을 통과하는 경우에는 특별한 고려가 필요하다. emergency 도중에는 in-flight join up을 수행해서는 안 된다(단, 모든 조종사들이 편대비행에 익숙하고 이를 수행할 수 있으며 의사소통이 가능하고 서로를 육안 확인한 경우 제외).