항공기의 PIC는 비행 전에 비행과 관련된 모든 정보를 숙지해야 한다. 여기에는 최신 기상 보고 및 예보, 연료 필요조건, 계획하는 비행이 완료될 수 없는 경우 이용 가능한 대안, 그리고 ATC로부터 전달받은 항적 지연에 대한 정보를 포함해야 한다.
Assembling Necessary Material
조종사는 비행 전에 필수 자료들을 수집해야 한다. 비행경로가 차트의 경계선 근처에 놓인 경우 적절한 sectional chart가, 그리고 비행경로와 인접한 지역에 대한 차트가 이러한 자료에 포함되어야 한다.
추가 장비에는 flight computer나 electronic calculator, plotter, 그리고 특정 비행에 적합한 그 외 품목이 포함되어야 한다. 예를 들어 야간 비행을 수행하는 경우 손전등을 휴대한다. 만약 사막 지역 상공을 비행한다면 물과 그 외 생필품을 휴대한다.
Weather Check
가장 먼저 기상을 확인하여 비행이 가능한지, 그리고 가능하다면 어떤 경로가 가장 좋은지를 확인하는 것이 현명하다. Chapter 12, “Aviation Weather Services”는 기상 브리핑을 받는 방법에 대하여 설명한다.
Use of Chart Supplement U.S.
착륙하려는 공항에 대해 이용 가능한 정보를 공부한다. 여기에는 NOTAMs, 그리고 Chart Supplement U.S.에 대한 공부가 포함되어야 한다. [그림 16-24] 여기에는 위치, 표고, 활주로 및 등화 시설, 이용 가능한 서비스, aeronautical advisory station frequency(UNICOM)의 가용성, 이용 가능한 연료의 형식(이는 재급유 지점을 결정하기 위함), FSS, control tower 주파수 및 ground control 주파수, 항적 정보, remarks, 그리고 기타 관련 정보가 포함된다. Chart Supplement U.S.가 발부된 후 발생한 위험 상황이나 변경 상황에 대한 추가 정보를 위해 NOTAM을 확인해야 한다.
각 sectional chart의 마지막 발행일 이후 발생한 주요 변경 사항을 확인하기 위해 sectional chart bulletin subsection을 확인해야 한다. 차트는 최대 6개월 이전의 것일 수 있다는 점을 기억하라. 차트의 유효 날짜는 차트 전면의 상단에 표시된다. Chart Supplement U.S.에는 보통 해당 사항에 대한 최신 정보를 포함하고 있다. 만약 차이가 있다면 차트의 정보보다 이를 우선적으로 사용해야 한다.
Airplane Flight Manual or Pilot’s Operating Handbook(AFM/POH)
AFM/POH(weight and balance data)를 확인하여 항공기의 올바른 적재를 확인해야 한다. 항공기에 탑재된 usable fuel과 drainable oil의 무게를 알아야 한다. 또한 승객들의 무게, 수하물의 무게, 그리고 항공기의 empty weight를 점검하여 총 무게가 최대 허용 무게를 초과하지 않는지를 확인해야 한다. 적재물이 어떻게 분배되어있는지를 알아야만 무게 중심이 허용 한계 이내에 있는지를 알 수 있다. empty weight와 empty weight CG를 얻기 위해선 AFM이나 그 외 permanent aircraft records의 최신 weight and balance 정보를 사용해야 한다.
계산된 하중, 공항 표고, 그리고 온도를 기반으로 적절한 차트를 통해 이착륙 거리를 결정한다. 그리고 이 값을 runway available과 비교한다. 하중이 무거울수록, 그리고 표고∙온도∙습도가 높을수록 takeoff roll/landing roll이 길어지며 상승률이 낮아진다는 것을 기억하라.
의도하는 비행 고도 및 출력 설정에서의 연소 소모율을 결정하기 위해 fuel consumption charts를 확인한다. 연료 소모율을 계산한 다음 이를 비행 예상시간과 비교하여 경로 상 급유 지점을 계획에 포함한다.
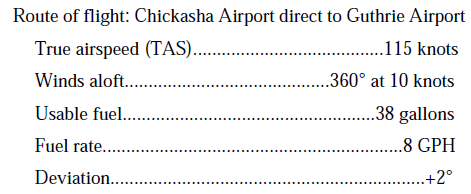
기상을 확인하였으며 몇몇 예비 계획을 완료하였다면 이제는 course를 작성하고 비행에 필요한 데이터를 결정할 순서이다. 다음은 course 작성, flight log 작성, 그리고 비행 계획서 제출에 필요한 논리적 순서를 제공한다. 아래의 정보와 그림 16-25를 통해 비행을 계획해보자.
Steps in Charting the Course
다음은 비행과 관련된 정보를 얻기 위한 권장 순서이다. 정보가 결정되었다면 이를 flight log에 기록할 수 있다. [그림 16-26] 계산이 필요한 경우 조종사는 수학적 공식을, 혹은 manual/electronic flight computer를 이용할 수 있다. manual/electronic flight computer의 사용에 익숙하지 않다면 설명서를 읽어보고 몇몇 연습 문제를 풀어보는 것이 좋을 것이다.
먼저 Chickasha Airport(point A)에서 Guthrie Airport(point F)까지 직선을 그린다. course line은 출항 공항의 중심에서 시작되어 목적지 공항의 중심에서 종료되어야 한다. 직항 경로인 경우 course line은 하나의 직선으로 구성된다. 직항 경로가 아닌 경우 두 개 이상의 직선 구간들이 구성된다. 예를 들어 비록 VOR station이 직항 경로로부터 벗어나있다 하더라도 항법을 용이하게 만들기 위해 이를 선택할 수 있다(무선 항법은 이 장의 뒷부분에서 설명됨).
적절한 checkpoints를 선택한 다음 이를 어떤 방법으로든 기록해둔다. 이러한 checkpoints는 찾기 쉬운 지점이거나(예를 들어 대도시, 큰 호수, 그리고 강), 혹은 쉽게 알아볼 수 있는 지점들이 조합된 곳(예를 들어 공항이 있는 마을, 그리고 고속도로가 있는 마을)이어야 한다.
차트에 노란색으로 표시된 마을만을 선택하라. 작은 원으로 표시되는 마을은 선택하지 않는다. 이러한 마을에는 집이 대여섯 채에 불과할 수도 있다. (단, 외딴 지역에서는 작은 원으로 표시되는 마을이 눈에 띄는 checkpoints가 될 수도 있음). 이 비행을 위해 네 개의 checkpoints가 선정되었다. checkpoint 1은 course의 동쪽에 위치한 타워로 구성되어 있다. 이는 checkpoint 1에 평행하게 놓인 고속도로와 철도를 통해 더 자세히 식별될 수 있다. checkpoint 2는 course의 서쪽에 위치한 장애물이다. 이는 바로 동쪽에 위치한 Will Rogers World Airport를 통해 더 자세히 식별될 수 있다. checkpoint 3은 Wiley Post Airport이다. 항공기를 해당 공항의 상공을 통과하여 비행해야 한다. checkpoint 4는 course의 서쪽에 위치한 private, non-surfaced airport이다. 이는 course의 동쪽에 위치한 철도와 고속도를 통해 더 자세히 식별될 수 있다.
계획하는 경로의 주변에 조종사가 주의해야 하는, 혹은 특별한 운영 조건을 필요로 하는 공역이 있는지를 확인해야 한다. 이 비행의 경우 Will Rogers World Airport를 둘러싼 C등급 공역(point B)을 통과한다는 점을 유의해야 한다. 또한 Wiley Post Airport를 둘러싼 D 등급 공역(point C)도 있다.
경로를 따라 위치하는 지형 및 장애물을 조사한다. 마주하게 될 가장 높은 표고, 가장 낮은 표고, 그리고 가장 높은 장애물을 파악한 다음 14 CFR part 91을 준수하는 적절한 고도를 선택한다. 지형으로부터 3,000ft 이상의 고도를 비행하는 경우비행 방향에 적합한 순항 고도를 준수해야 한다. 특히 경로 상에 험준한 지형이 있는지를 확인하여 이를 피할 수 있도록 한다. 이착륙이 수행되는 지역에 높은 장애물이 있는지를 확인해야 한다. 텔레비전 송신탑은 주변 지형으로부터 1,500ft 이상의 높이까지 뻗어있을 수 있다. 조종사는 송신탑의 존재 여부와 그 위치를 인지해야 한다. 이번 비행의 경우 가장 높은 장애물은 2,749ft MSL의 안테나임을 유의해야 한다(point D. ceiling 5,300ft MSL). 가장 높은 표고는 북동쪽 사분면에 위치하며 2,900ft MSL이다(point E. ceiling 3,800ft MSL).
C등급 공역과 D등급 공역의 상공을 비행하는 것이 바람직하므로 5,500ft MSL의 고도를 선택한다. 또한 이 고도는 모든 장애물로부터 충분한 안전거리를 제공할 뿐만 아니라 14 CFR part 91의 조건(0 ~ 179도의 magnetic course를 비행하는 경우 홀수 고도 +500ft)에도 부합한다.
그런 다음 조종사는 course의 총 거리를, 그리고 checkpoints 사이의 거리를 측정해야 한다. 총 거리는 53NM이다. 그리고 checkpoints 사이의 거리는 그림 16-26의 flight log에 표시되어 있다.
거리를 결정한 후에는 TC를 측정해야 한다. TC는 031도이다. TH가 설정되었다면 조종사는 이제 compass heading을 결정할 수 있다. 이는 이 장의 앞부분에 설명된 공식을 따르면 된다.
공식은 다음과 같다:
TC ± WCA = TH ± V = MH ± D = CH
WCA는 manual/electronic flight computer를 통해 결정될 수 있다. 풍향 360도 및 풍속 10노트를 통해 WCA가 3도 왼쪽임이 결정된다. 이를 TC로부터 빼면 TH 28도가 결정된다. 그런 다음 비행경로와 가장 가까운 등편차선을 찾아서 편차를 결정해야 한다. 그림 16-25에서 편차가 6.30°E(7°E로 반올림)로 표시되므로 TH에서 이 값을 뺀다. 그 결과는 MH 21도이다. 그런 다음 자차 보정을 위해 MH에 2를 더한다. 그 결과 compass heading 23도가 주어진다.
이제 GS를 결정할 수 있다. 이는 manual/electronic flight computer를 통해 결정될 수 있다. GS는 106노트로 계산된다. 이 정보를 바탕으로 총 비행시간, checkpoints 사이의 시간, 그리고 연료 소모량을 결정할 수 있다. 이러한 수치들은 manual/electronic flight computer를 통해 계산될 수 있다.
이 비행의 경우 GS는 106노트이고, 총 비행시간은 35분이며, 연료 소모량은 4.7갤런이다. checkpoints 사이의 시간은 그림 16-26의 flight log를 참조한다.
비행 도중 headings와 time을 기록하여 heading, GS, 그리고 time을 수정할 수 있다.
비행 계획서를 제출하는 것은 규정상 의무사항은 아니다. 허나 비상 상황 발생 시 비행계획서에 포함된 정보가 search and rescue에 활용될 수 있으므로 비행 계획서를 제출하는 것이 권장된다.
비행 계획서는 공중에서 라디오로 제출될 수 있다. 허나 출항 전에 전화를 제출하는 것이 가장 좋다. 이륙 후 FSS와 교신한 다음 이륙 시간을 알림으로써 비행 계획서가 활성화될 수 있도록 한다.
VFR 비행 계획서가 제출된 경우 FSS는 이를 proposed departure time으로부터 1시간 후까지 보관한 후 취소한다(단, 실제 출항 시간을 수신한 경우, 수정된 proposed departure time을 수신한 경우, 혹은 proposed departure time이 충족되리라 알림 받았지만 불충분한 교신 기능으로 인하여 실제 출항 시간을 받을 수 없는 경우). 허나 비행 계획서를 접수하는 FSS specialist는 조종사에게 이러한 절차를 알려주지 않는다.
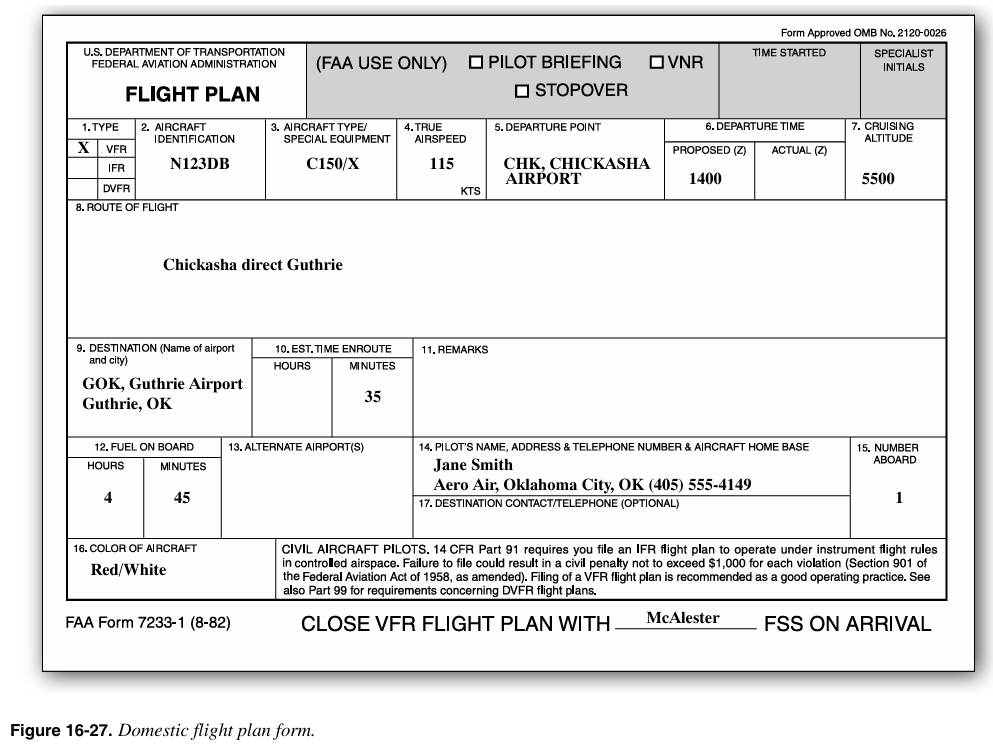
그림 16-27은 FSS에 제출하는 비행 계획서 양식을 보여준다. 전화나 라디오로 비행 계획서를 제출하는 경우 양식의 번호 순서대로 정보를 제공한다. 이는 FSS specialist로 하여금 정보를 더 효율적으로 받아 적을 수 있게 해준다. 대부분의 항목들은 특별한 설명이 필요 없으나 몇몇 항목들은 그렇지 않다.
∙Item 3은 항공기 형식과 특별 장비이다. 예를 들어 C-150/X는 항공기에 트랜스폰더가 없음을 의미한다. 특별 장비 코드 목록은 AIM에서 확인할 수 있다.
∙Item 6은 proposed departure time이다. 이는 UTC(“Z”)를 기준으로 한다.
∙Item 7은 순항 고도이다. 일반적으로 여기에는 “VFR”이 입력될 수 있다. 왜냐하면 조종사는 FAA 규정을 준수하는 순항 고도를 선택하기 때문이다.
∙Item 8은 비행경로이다. 만약 직항경로라면 “direct”이라는 단어를 입력한다. 만약 직항경로가 아니라면 실제 경로를 입력한다(예를 들어 via certain towns, 혹은 via navigation aids).
∙Item 12는 시간 및 분 단위의 탑재 연료이다. 이는 사용 가능한 총 연료량(갤런)을 예상 연료 소모율(갤런)로 나누어 결정된다.
비행계획서를 제출하면 모든 이점을 가진다는 것을 기억하라. 허나 도착 즉시 비행 계획서를 종료하는 것을 잊지 않아야 한다. 라디오 혼잡을 방지하기 위해 이는 전화로 수행되어야 한다.
항공기에 설치된 항법 무선 수신기의 발전, 지상 송신국의 정확한 위치 및 주파수를 나타내는 항공 차트의 개발, 그리고 세련된 조종실 계기 덕분에 조종사는 원하는 모든 지점을 향하여 정확하게 항행할 수 있게 되었다. 이러한 장비들을 통해 정밀한 항법이 가능하긴 하지만 초보 조종사들은 먼저 지문항법을 보완하기 위해 해당 장비들을 사용해야 한다. 이러한 방법은 교신 두절 조종사의 방향감각 상실을 방지하는데 효과적이다.
※ 다음은 대한항공 항법 교재를 발췌한 내용이다.
3. 무선항법 (Radio Navigation)
추측항법을 아무리 정확하게 수행한다 하더라도, 바람이 예상과 다르게 불거나 기타 다른 요소들로 인하여 오차가 발생할 수 밖에 없습니다. 악기상이나 지상에 특별한 시각 참조물들이 없는 상황에서도 비행하면서 추측항법으로 인해 발생하는 오차를 극복하고, 항상 일정한 항로를 비행하기 위하여 세계 제 2차 대전을 기점으로 해서 발전된 항법이 바로 무선항법입니다. 무선항법이란 지상 송신국으로부터 보내진 전파를 항공기에 탑재된 수신 장비를 통해 수신하여 현 위치를 파악하고 이를 토대로 비행하는 항법입니다. 무선항법에 사용되는 대표적 지상 항행안전시설로는 VOR, NDB, DME, ILS 등이 있습니다. 무선항법은 기존의 지문항법과 추측항법의 단점을 극복하고 항상 일정한 항로를 비행할 수 있다는 장점이 있으나, 지상 항행안전시설들의 위치라는 한계로 인해 많은 제약을 받습니다. 최근 들어 RNAV 항로가 도입되고는 있으나 아직은 도입 초기 단계로 현 지상 항로의 큰 틀은 여전히 지상 항행안전시설들을 기준으로 설계가 되어 운영되고 있다고 할 수 있습니다. 출 도착 및 접근 절차들 역시 지상 항행안전시설들을 기준으로 설계 되고 운영되었으나, 최근에는 RNAV 출 도착 절차들과 RNP 접근 절차들의 비율이 커지고 있는 추세입니다.
VFR 항법에 사용할 수 있는 무선 항법 시스템은 세 가지가 있다:
• VHF Omnidirectional Range(VOR)
• Nondirectional Radio Beacon(NDB)
• Global Positioning System(GPS)
Very High Frequency(VHF) Omnidirectional Range(VOR)
VOR 시스템은 세 가지 항법 보조 시설(NAVAIDs)로 존재한다: VOR, VOR/DME(distance measuring equipment), 그리고 VORTAC. VOR은 station에 대한 to from magnetic bearing 정보를 제공한다. DME가 VOR과 함께 설치될 경우 이는 VOR/DME라 불린다. 군의 TACAN(tactical air navigation)이 VOR에 함께 설치될 경우 이는 VORTAC이라 불린다. DME는 항상 VORTAC의 구성 요소이다. VOR indicator는 NAVAID의 형식(VOR, VOR/DME, 혹은 VORTAC)과 상관없이 동일하게 작동한다. 따로 설명되지 않는 한 이 장의 VOR, VOR/DME, VORTAC은 모두 VOR이라 불린다.
omnidirectional range는 송신국으로부터 모든 방향으로 직선 경로(radials)를 투사하는 VHF radio transmitting ground station이다. 이를 위쪽에서 바라보면 바퀴 허브의 바퀴살처럼 보일 수 있다. VOR radials가 투사되는 거리는 송신기의 전력 출력에 따라 달라진다.
송신국으로부터 투사되는 radials는 자북을 기준으로 한다. 따라서 radial은 VOR station에서 바깥으로 연장되는 magnetic bearing으로 정의된다. radials는 001(자북으로부터 1도 동쪽) ~ 360 사이의 모든 숫자들로 식별된다. 방향정위를 돕기 위해 compass rose가 항공 차트의 송신국 위치에 겹쳐져 있다.
VOR ground stations는 108.0-117.95MHz의 VHF 주파수 대역 내에서 송신한다. 장비가 VHF이기 때문에 송신 신호는 가시선의 제한을 받는다. 따라서 수신 장비의 고도에 비례하여 그 범위가 달라진다. 일반적으로 1,000ft AGL에서의 신호 수신 범위는 약 40 ~ 45마일이다. 이 거리는 고도에 따라 증가한다. [그림 16-28]
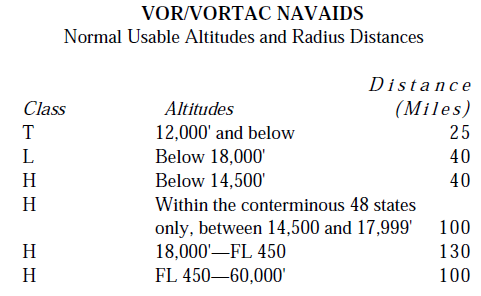
VOR과 VORTAC는 운영 용도에 따라 세 가지 등급으로 분류된다:
• T (Terminal)
• L (Low altitude)
• H (High altitude)
일반적인 유효 거리가 다음 표에 나타나 있다:
특정 시설의 유효 거리는 50마일 미만일 수 있다. 이러한 제한과 연관된 자세한 내용은 Chart Supplement U.S.의 Communication/NAVAID Remarks를 참조한다.
VOR radials의 경로 정확성은 우수하다. 그 정확성은 일반적으로 ±1도 이내이다. 허나 VOR 수신 장비의 특정 부분이 손상될 경우 정확도에 영향을 미친다. 이는 특히 VOR station으로부터 멀리 떨어진 곳에 있을 때 더욱 그러하다. VOR 수신기의 정확도를 확인하기 위해 주기적인 점검 및 보정을 수행한다. VOR 정확도 점검은 VFR 비행을 위한 필요조건이 아니다. 허나 장비의 정확성을 확인하기 위해 이러한 점검이 자주 수행되어야 하며 매년마다는 완전한 보정이 이루어져야 한다. 조종사가 VOR 정확도를 확인할 수 있는 방법은 다음과 같다:
• FAA VOR test facility(VOT)
• 인증된 공중 점검지점
• 인증된 지상 점검지점
만약 항공기에 두 개의 VOR 수신기가 설치되어 있다면 dual VOR receiver check을 수행할 수 있다. dual receiver check을 수행하기 위해선 두 개의 VOR 수신기를 동일한 VOR 지상시설로 동조해야 한다. 두 개의 VOR 수신기가 지시하는 bearings 사이의 최대 허용 편차는 4도이다. 지상 및 공중 점검지점의 목록은 Chart Supplement U.S.에 게재되어 있다.
기본적으로 이러한 점검은 항공기 장비가 수신하는 VOR radials가 송신국이 송출하는 radials와 정렬되어 있는지 확인하는 것으로 구성된다. VFR 비행을 위한 특정 허용 편차는 없다. 허나 정확도를 보장하기 위해 IFR에서 요구하는 허용 편차를 이용할 수 있다(지상 점검의 경우 ±4도, 공중 점검의 경우 ±6도). 이러한 점검은 조종사가 수행할 수 있다.
VOR transmitting station은 모스코드 식별부호를 통해, 또는 송신국 명칭 및 “VOR”을 명시하는 음성 녹음을 통해 확인될 수 있다. 많은 FSS가 VOR이 작동하는 주파수를 통해 음성 메시지를 송출한다. 송신국을 식별하기 위해 FSS의 음성 송출을 의존해서는 안 된다. 왜냐하면 많은 FSS들이 그들과 이름이 다른 몇몇 omniranges를 통해 원격으로 음성 메시지를 송출하기 때문이다. VOR이 정비로 인하여 작동하지 않는 경우 식별 부호가 송출되지 않는다. 이는 조종사에게 해당 송신국이 항법에 사용되어서는 안 된다는 것을 경고한다. VOR 수신기는 항법 장비를 작동시키기엔 신호 강도가 불충분한 상황을 나타내기 위하여 alarm flag를 갖춘다. 이는 항공기가 VOR로부터 너무 멀리 있는 경우, 혹은 항공기가 너무 낮아서 송출 신호의 가시선을 벗어나는 경우에 발생한다.
Using the VOR
VOR 무선 항법을 위해선 두 가지 요소가 필요하다: 지상 송신기, 그리고 항공기 수신 장비. 지상 송신기는 지상의 특정 부분에 위치하며 할당된 주파수로 송출을 수행한다. 항공기 장비에는 송신기, 그리고 VOR이나 omninavigation 계기가 포함된다. 항법 계기는 CDI(course deviation indicator), HSI(horizontal situation indicator), 혹은 RMI(radio magnetic indicator)가 될 수 있다. 각 계기는 모두 VOR에 대한 course를 지시한다.
Course Deviation Indicator(CDI)
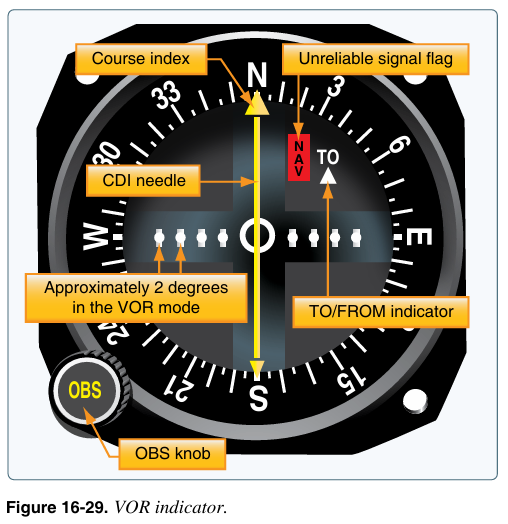
CDI는 대부분의 훈련 항공기에서 발견된다. 이는 OBS(omnibearing selector. 간혹 course selector라고도 불림), CDI needle(left-right needle), 그리고 TO/FROM indicator로 구성된다.
course selector는 원하는 radial을 선택하기 위해, 혹은 항공기가 비행 중인 radial을 결정하기 위해 조작될 수 있는 azimuth dial이다. 또한 magnetic course “TO” or “FROM” the station도 결정할 수 있다.
course selector를 돌리면 항공기에 대한 radial 위치를 나타내기 위해 CDI가 움직인다. deviation needle이 중앙에 위치할 때까지 course selector를 조작하면 radial(magnetic course “FROM” the station)을, 혹은 radial의 reciprocal(magnetic course “TO” the station)을 결정할 수 있다. course selector에 설정된 radial로부터 항공기가 편류하는 경우에도 course deviation needle이 좌우로 움직인다.
needle을 중앙에 두면 course selector는 course “FROM” the station을, 혹은 course “TO” the station을 지시한다. “TO”가 지시될 경우 course selector에 나타나는 경로는 station으로 향하는 비행이다. [그림 16-29] “FROM”이 지시될 경우 course selector에 나타나는 경로는 station으로부터 멀어지는 비행이다.
Horizontal Situation Indicator
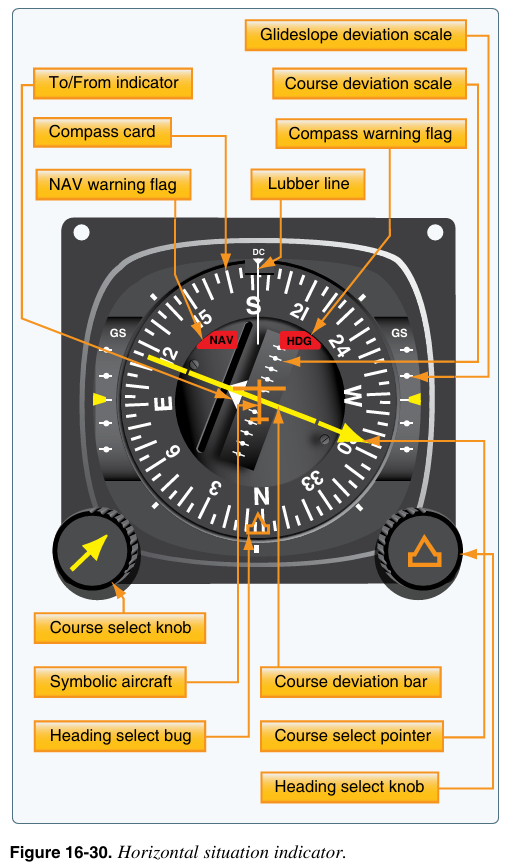
HSI는 compass card를 구동하기 위해 flux valve를 이용하는 direction indicator이다. HSI는 magnetic compass를 항법 신호, 그리고 glideslope와 결합시킨다[그림 16-30]. HSI는 설정된 radial에 대한 항공기의 위치를 조종사에게 제공한다.
그림 16-30에서 compass card의 lubber line에 표시된 magnetic heading은 184도이다. course select pointer는 295도로 설정되어 있다. pointer의 꼬리는 그 반대인 115도를 가리킨다. course deviation bar는 course select pointer로 선정한 course로부터의 좌우 편차를 나타내기 위하여 VOR/Localizer(VOR/LOC), 혹은 GPS navigation receiver와 함께 작동한다. 동일한 방식으로 작동하는 종래의 VOR/LOC needle은 각이 진 움직임을 통해 course의 편차를 지시한다.
원하는 course는 course select knob를 통해 course select pointer를 회전시킴으로써 선택된다. HSI에는 고정된 aircraft symbol이 있으며 course deviation bar는 설정한 course에 대한 항공기 위치를 나타낸다. TO/FROM indicator는 삼각형 모양의 pointer이다. indicator가 course select pointer의 머리 부분을 가리키고 있으며 이를 제대로 교차 및 비행할 경우 해당 course는 항공기를 선정한 시설로 향하게 만든다. indicator가 course select pointer의 꼬리 부분을 가리키고 있으며 이를 제대로 교차 및 비행할 경우 해당 course는 항공기를 선정한 시설로부터 멀어지게 만든다.
NAV warning flag는 신뢰할 수 없는 신호를 수신하고 있음을 나타낸다. HDG flag는 compass card가 제대로 작동하지 않음을 나타낸다.
Radio Magnetic Indicator(RMI)
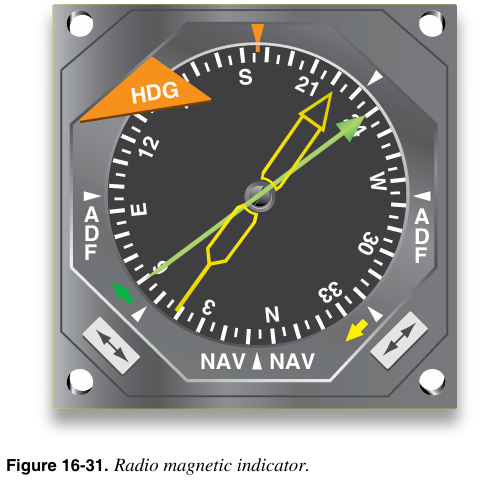
RMI는 항공기의 magnetic heading(혹은 directional gyro heading)과 VOR∙GPS∙ADF(automatic direction finder) bearing 정보를 제공하는 항법 보조 장치이다. [그림 16-31] 오래된 heading indicators의 오류 및 한계들을 보상하기 위해 remote indicating compasses가 개발되었다. remote compass transmitter는 보통 자기 간섭을 피하기 위하여 wingtip에 장착되는 별도의 장치이다. RMI는 compass card, heading index, 두 개의 bearing pointers, 그리고 pointer function switches로 구성된다. 두 개의 pointers는 GPS, ADF, 그리고/혹은 VOR 중 두 개가 조합되어 작동한다. 조종사는 계기에 표시될 항법 보조 장치를 선택할 수 있다. pointer는 NAVAID나 waypoint로 향하는 course를 표시한다. 그림 16-31에서 녹색 pointer는 ADF로 동조된 송신국을 지시한다. 노란색 pointer는 VOR이나 GPS waypoint로 향하는 course를 지시한다. RMI의 경우 조종사가 course를 선택하지 않아도 된다. 선택된 navigation source는 needle(s)에 의해 지시된다.
Tracking With VOR
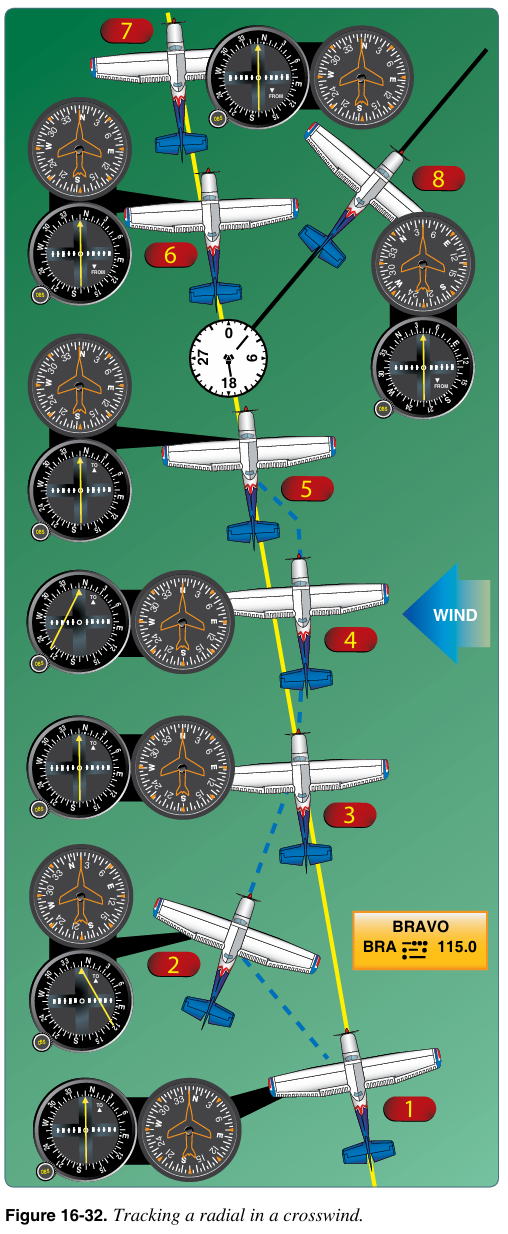
다음은 CDI를 사용하여 tracking to and from a VOR station을 수행하는 절차를 설명한다. [그림 16-32]
먼저 VOR 수신기를 특정 VOR station 주파수로 동조한다. 예를 들어 Bravo VOR을 수신하기 위해 115.0을 설정한다. 그 다음 원하는 VOR이 수신되는지 확인하기 위해 식별자를 확인한다. VOR이 동조된 후 course deviation needle이 왼쪽이나 오른쪽으로 벗어날 것이다. 이제 course deviation needle이 중앙에 오고 TO-FROM indicator가 “TO”를 지시할 때까지 azimuth dial을 course selector로 조작한다. needle이 중앙에 왔으나 “FROM”이 지시될 경우 방위각을 180도 돌려야 한다. 왜냐하면 이 예시에서는 “TO” the station을 비행하고 있기 때문이다. 이제 항공기를 VOR azimuth dial이나 course selector에서 지시하는 heading(이 예시에서는 350도)으로 선회한다.
우측풍이 부는 상태에서 heading 350을 유지할 경우 항공기는 의도하는 track으로부터 좌측으로 편류한다. 항공기가 course로부터 편류할수록 VOR course deviation needle은 점점 중심에서 우측으로 움직인다.
원하는 radial로 돌아가기 위해선 항공기의 heading이 우측으로 향하여야 한다. 항공기가 원하는 track으로 돌아감에 따라 deviation needle이 천천히 중앙으로 움직인다. needle이 중앙에 맞춰질 경우 항공기는 원하던 radial로 돌아온 것이다. 이때 좌측으로 선회하되 원래의 heading인 350까지 선회해서는 안 된다. 왜냐하면 편류를 수정해야하기 때문이다. 수정의 양은 풍속에 따라 달라진다. 만약 풍속을 모른다면 정확한 heading을 찾기 위해 시행착오가 이루어질 수 있다. 이 예시에서는 10도의 수정(heading 360)을 유지해본다 가정하자.
heading 360을 유지하는 동안 course deviation이 좌측으로 움직일 경우 이는 10도의 수정이 너무 커서 항공기가 course의 우측으로 비행하고 있음을 의미한다. 원하는 radial로 돌아오기 위해 좌측으로 약간 선회한다.
deviation needle이 중앙에 오면 5도의 수정(heading 355)을 유지해본다. 이 수정이 적절하면 항공기는 radial에 남아있다. 만약 그러지 않다면 heading의 조그마한 변화가 만들어져야 한다.
VOR station을 통과하는 동안 course deviation needle이 요동치다가 안정된 후 “TO” 지시가 “FROM” 지시로 변화한다.
일반적으로 tracking inbound에 사용되는 것과 동일한 기법이 tracking outbound에서도 사용된다. 만약 station 상공을 통과한 후 inbound radial의 반대편에서 track outbound를 할 목적이라면 course selector를 변경하지 않는다. needle을 중앙에 두기 위하여 동일한 수정 방법을 수행한다. 단 하나의 차이점은 omnidirectional range가 “FROM”을 지시하는 것이다.
inbound radial의 반대편이 아닌 outbound course를 tracking하는 경우에는 새로운 course를 course selector에 설정해야 한다. 그리고 해당 course를 교차하기 위해 선회가 이루어져야 한다. course에 도달한 후에는 이전에 언급한 것과 동일한 tracking 절차를 따른다.
Tips on Using the VOR
• 코드나 음성 식별부호를 통해 송신국을 확실히 식별한다.
• VOR 신호는 “가시선”임을 기억하라. 항공기가 송신국으로부터 너무 낮은 경우, 혹은 너무 먼 경우에는 약한 신호가 수신되거나 신호가 전혀 수신되지 않는다.
• 송신국을 향하여 비행하는 경우 inbound radial을 결정한 다음 해당 radial을 사용한다. course를 유지할 수 있는 heading으로 비행한다. 항공기가 편류하는 경우 course를 다시 교차할 수 있는 heading으로 비행한 다음 편류 수정을 적용한다.
• 약간의 needle 변동이 발생하였을 때 heading을 급격히 바꾸는 것을 피한다. needle이 다시 중앙에 오는지를 잠시 확인한다. 만약 그렇지 않는다면 course를 needle에 정확히 정렬시킨다.
• “TO” a station을 수행하는 경우 항상 선택한 course를 “TO” indication과 함께 비행한다. “FROM” a station을 수행하는 경우 항상 선택한 course를 “FROM” indication과 함께 비행한다. 만약 비행이 이렇게 수행되지 않을 경우 course deviation needle의 움직임이 반대로 나타난다. 항공기가 “FROM” indication과 함께 station을 향하여 비행하거나, 혹은 “TO” indication과 함께 station으로부터 멀어지도록 비행한다면, course deviation needle은 지시해야할 방향의 반대쪽을 지시한다. 예를 들어 비행하고 있던 radial의 우측으로 항공기가 편류할 경우 needle이 radial의 우측으로 움직인다. 만약 비행하고 있던 radial의 좌측으로 항공기가 편류할 경우 needle이 radial의 좌측으로 움직인다.
• VOR을 사용하여 항행할 경우 course를 유지하는, 혹은 교차하는 headings를 비행하는 것이 중요하다. 단순히 needle을 향하여 선회할 경우 radial을 overshoot 하여 course의 좌우로 S turn을 만들 것이다.
Time and Distance Check From a Station Using a RMI
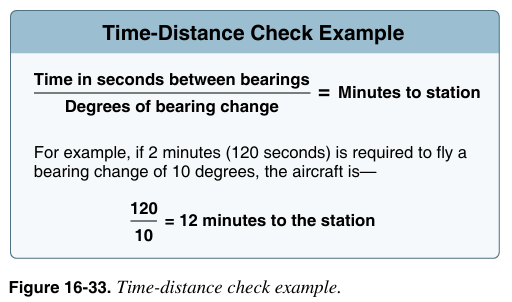
송신국으로부터의 시간 및 거리를 계산하기 위해 우선 RMI bearing pointer가 가장 가까운 90도 index에 놓이도록 항공기를 선회한다. 그런 다음 시간을 재기 시작하고 heading을 유지한다. RMI bearing pointer가 10도를 움직였을 때 경과된 시간(초 단위)을 확인한다. 그리고 특정 송신국으로부터의 대략적인 시간 및 거리를 결정하기 위하여 다음 공식을 적용한다. [그림 16-33]
만약 10도의 bearing 변화에 75초가 요구된다면 항공기는 station으로부터 7.5분 거리에 있다. RMI bearing pointer가 빠르게 움직이는 경우, 혹은 pointer를 wingtip 위치에 두는데 수정이 필요한 경우 항공기는 station을 통과하고 있다.
송신국으로부터의 거리는 계산하였던 시간(분)을 TAS/60이나 GS/60에 곱하여 구해진다. 예를 들어 만약 항공기가 송신국으로부터 7.5분 거리에 있으며 TAS가 120노트(혹은 분당 2NM)라면 그 거리는 15NM(7.5 x 2 = 15)이다.
시간 및 거리의 정확성은 바람, bearing이 변화하는 정도, 정확한 시간 측정 따라 달라진다. 변수들로 인하여 결과 값은 근사치에 불과하다. 허나 정확한 heading을 비행하고, 시간과 bearing을 정확히 확인함으로서 조종사는 송신국으로부터의 시간 및 거리를 합리적으로 측정할 수 있다.
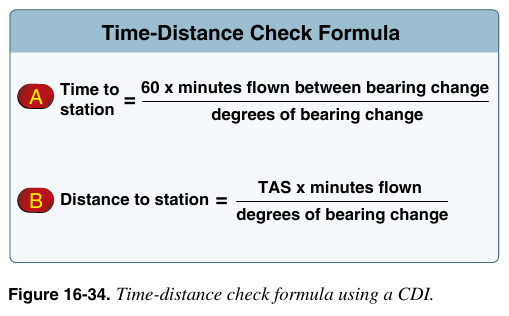
Time and Distance Check From a Station Using a CDI
CDI를 사용하여 송신국으로부터의 시간 및 거리를 계산하기 위해서는 먼저 VOR station을 동조 및 식별한다. 그런 다음에는 본인이 위치한 radial을 결정한다. 이후 inbound로 선회하고 needle을 중앙에 둔다. inbound course의 좌측이나 우측으로 90도 선회한 다음 OBS를 선회 반대 방향으로 10도 돌린다. heading을 유지하다가 CDI가 중앙에 들어왔을 때 시간을 재기 시작한다. 동일한 heading을 유지한 상태에서 OBS를 다시 10도 돌린다. CDI가 중앙에 들어오면 경과된 시간을 적는다. 그림 16-34의 공식을 통해 송신국으로부터의 시간 및 거리가 계산된다.
Course Intercept
course interception은 대부분의 계기 항법 구간에서 수행된다. 사용되는 장비는 다양하지만 특정한 문제를 해결하기에 충분한 rate of intercept나 angle of intercept로 이어지는 intercept heading을 비행해야 한다.
Rate of Intercept
bearing pointer나 HSI의 움직임으로 확인되는 rate of intercept는 다음 요소들의 결과이다:
• 원하는 course를 향해 항공기가 비행하는 각도(angle of intercept)
• 진대기속도와 바람(GS)
• 송신국으로부터의 거리
Angle of Intercept
angle of intercept는 항공기의 heading(intercept heading)과 원하는 course 사이의 각도이다. intercept heading의 조정을 통해 이러한 각도를 제어하는 것은 course interceptions를 조절하는 가장 효율적인 방법이다. angle of intercept는 course로부터의 각도보다 커야하지만 90도를 초과하여서는 안 된다. 이러한 한계 이내에서 가장 적절한 rate of intercept가 만들어지도록 조절을 수행한다.
intercept heading 선택 시 중요한 것은 송신국으로부터의 거리와 course로부터의 각도 사이의 상관관계이다. 송신국으로부터 60NM 거리일 때 1도는 1NM 폭이다. 이 폭은 60NM 거리에 비례하여 증감한다. 예를 들어 120NM에서 1도는 2NM 폭이다. 그리고 30NM에서 1도는 1/2NM 폭이다. 특정 GS 및 angle of intercept로 인한 rate of intercept는 송신국으로부터의 거리에 따라 달라진다. angle of intercept를 위해 intercept heading을 선택할 때 다음 요소들을 고려한다:
• course로부터의 각도
• 송신국으로부터의 거리
• 진대기속도와 바람(GS)
Distance Measuring Equipment(DME)
DME는 UHF(ultra high frequency) 항법 보조 장치, 그리고 VOR/DME 및 VORTAC으로 구성된다. DME는 VOR/DME나 VORTAC으로부터의 항공기 경사 거리를 NM 단위로 측정한다(여기서부터 VOR/DME와 VORTAC을 VORTAC이라 부르겠다). DME가 매우 대중적으로 이용되기는 하지만 모든 항공기가 DME를 장비하는 것은 아니다.
DME를 사용하기 위해선 조종사는 이전에 설명한 방법대로 VORTAC을 선택하고, 동조하고, 식별해야 한다. DME 수신기는 “paired frequency”라 불리는 개념을 사용한다. 이는 조종사가 선택한 VHF VORTAC 주파수와 연관된 UHF DME 주파수를 자동으로 선택하고 동조한다. 이러한 절차는 조종사에게 있어 매우 편리하다. DME display는 VORTAC으로부터의 경사 거리를 표시한다. 경사 거리는 항공기와 VORTAC간의 직진 거리이므로 항공기 고도의 영향을 받는다. (VORTAC 직상공을 6,076ft AGL에서 통과할 경우 DME는 대략 1.0NM을 나타낼 것이다.) DME는 VOR 항법에 매우 유용한 보조 장치이다. VOR radial은 항공기가 위치하는 선에 대한 정보만을 제공한다. DME를 통해 조종사는 특정 선상의 항공기 위치를 정확하게 찾을 수 있다.
또한 대부분의 DME 수신기는 GS와 time-to-station mode를 제공한다. GS는 노트(NMPH) 단위로 표시된다. time-to-station mode는 GS를 기반으로 VORTAC까지의 남은 시간을 표시한다. GS와 time-to-station 정보는 VORTAC을 곧장 to/from tracking 하는 경우에만 정확하다. DME 수신기가 정확한 GS나 time-to-station 정보를 표시하기 위해선 먼저 1~2분간 VORTAC을 곧장 to/from tracking 해야 한다.
몇몇 DME는 hold 기능을 갖추고 있다. 이는 특정 VORTAC의 DME 신호를 유지하되 course indicator는 ILS나 다른 VORTAC의 course deviation 정보를 나타낼 수 있게 해준다.
VOR/DME RNAV
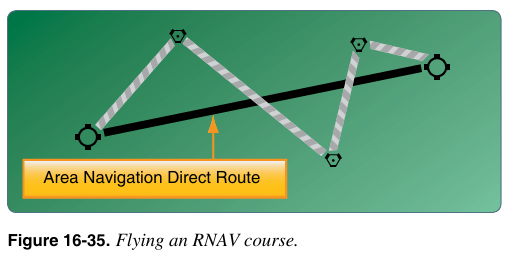
area navigation(RNAV)은 조종사가 설정한 지점들 사이의 direct route에 대한 전자식 경로 안내를 제공한다. 비록 RNAV는 다양한 NAVAIDS(예를 들어 GPS 등등)에 적용되는 일반 용어이지만 이 section에서는 VOR/DME를 기반으로 하는 RNAV만을 다룬다. VOR/DME RNAV는 별도의 ground-based NAVAID가 아니다. 이는 항공기의 RNAV computer로 처리된 VOR/DME 및 VORTAC 신호를 사용하는 항법이다. [그림 16-35]
NOTE: 이 section에서 “VORTAC”이라는 용어는 VOR/DME NAVAID를 포함한다.
VOR/DME RNAV를 통해 조종사는 VORTAC을 보다 편리한 위치로 이동시킬 수 있다. 이렇게 전자적으로 재배치된 VORTAC을 waypoints라 부른다. 이러한 waypoints는 특정 VORTAC의 서비스 범위 내에서 선택된 radial/distance로 설명된다. 이러한 waypoints를 통해 거의 모든 출발지와 목적지 사이를 직선 경로로 비행할 수 있다.
VOR/DME RNAV 장비의 기능과 작동 방법은 저마다 다르지만 기본 작동 원리는 동일하다. 조종사들은 VOR/DME RNAV이나 익숙하지 않은 항법 시스템을 사용하기 전에 제조업체의 매뉴얼을 공부해야 한다. 운영 정보과 제한들은 placards를, 그리고 AFM/POH의 supplement section을 참조한다.
VOR/DME-based RNAV는 최소 세 가지 모드로 작동한다: VOR, en route, 그리고 approach. 몇몇 모델들에서는 네 번째 모드인 VOR Parallel이 있다. 장비들이 RNAV mode로 작동하기 위해선 VOR 신호와 DME 신호를 둘 다 필요로 한다. 만약 선택한 NAVAID가 DME가 없는 VOR이라면 RNAV mode는 작동하지 않을 것이다.
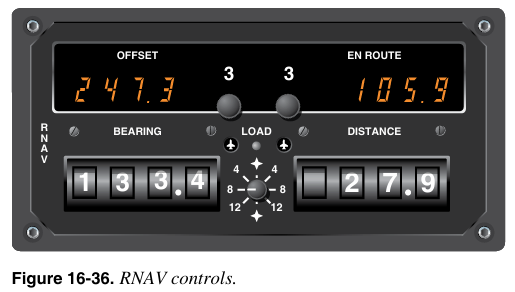
VOR(혹은 non-RNAV) mode에서는 장비가 단순히 DME 성능을 갖춘 VOR 수신기처럼 기능한다. [그림 16-36] VOR indicator에 나타나는 VOR/DME RNAV 표시는 모든 면에서 일반적이다. established airways를 비행하는 경우, 혹은 그 외 일상적인 VOR 항법을 수행하는 경우에는 VOR mode가 사용된다.
RNAV 기능을 사용하기 위해선 조종사는 waypoint를, 혹은 일련의 경로를 지정하는 waypoint들을 설정해야 한다. VORTAC이나 VOR/DME가 NAVAID로 선택되어야 한다. 왜냐하면 이러한 송신국들로부터 radial/distance 신호를 얻을 수 있기 때문이다. waypoint를 설정하기 위해 VORTAC 서비스 범위 내의 특정 지점을 radial/distance 기준으로 지정한다. waypoint가 입력되었으며 RNAV en route mode가 선택되었다면 CDI는 waypoint로 향하는 course guidance를 표시한다. 또한 DME는 waypoint까지의 거리를 나타낸다. 장비들은 여러 waypoints를 저장할 수 있는 기능을 가지고 있다. 이를 통해 waypoints를 비행 전에 프로그래밍 할 수 있으며 비행 도중 불러올 수도 있다.
RNAV waypoints는 1/10 단위의 radials(예를 들어 275.5도)와 1/10 단위의 거리(예를 들어 25.2NM)로 입력된다. RNAV waypoints를 항공 차트에 표시할 경우 조종사들은 해당 수준의 정확도로 측정되는 것이 어렵다는 것을 알게 된다. flight planning publications의 경우 공항의 좌표와 waypoints를 해당 수준의 정확도로 게재하고 있으며 VOR/DME RNAV는 이러한 수치들을 수용한다. RNAV mode에서는 CDI의 작동 및 표시에 있어 중요한 차이가 발생한다.
RNAV mode에서는 course deviation이 linear deviation으로 표시된다. RNAV en route mode에서 CDI의 maximum deflection은 보통 선택된 course로부터 양쪽 5NM을 나타낸다(이는 waypoint와의 거리와 상관없음). RNAV approach mode에서 CDI의 maximum deflection은 보통 선택된 course로부터 양쪽 1 1/4NM을 나타낸다. RNAV mode에서는 항공기가 waypoint에 가까워짐에 따라 CDI sensitivity가 증가하지 않는다.
RNAV approach mode는 계기 접근을 위해 사용된다. 해당 모드의 좁은 축적은(en route mode의 1/4) 선택된 waypoint에 대한 to/from tracking을 매우 정교하게 수행한다. VFR cross-country 항법 도중 approach mode를 사용하여 course tracking을 수행하는 것은 바람직하지 않다. 왜냐하면 approach mode는 많은 주의가 필요 되어 곧 지루해지기 때문이다.
잘 사용되지는 않는 네 번째 모드는 VOR Parallel mode이다. 이는 항공기가 VORTAC를 to/from track할 때 linear deviation을 표시할 수 있게 해준다. 이 모드는 선택된 course나 airway로부터 특정 거리만큼 offset(혹은 parallel)을 할 수 있는데서 그 이름이 유래되었다. VOR parallel mode는 기존 VORTAC의 직상공에 waypoint를 배치하는 것과 동일한 효과를 가진다. 일부 조종사는 autopilot의 NAV(navigation) tracking 기능을 사용할 때 VORTAC 근처에서 course를 원활하게 따라가기 위하여 VOR parallel mode를 선택한다.
VOR/DME-based RNAV로 항행하는 것은 혼잡할 수 있으므로 조종사는 항공기에 설치된 장비를 잘 알아야 한다. 조종사가 switch positions나 annunciators를 간과하여 의도치 않게 RNAV modes 중 하나를 작동하는 경우가 종종 있다. 또한 조종사가 switch positions나 annunciator를 간과하여 RNAV modes 중 하나를 작동하지 않은 경우도 있었다. 항상 그렇듯 신중한 조종사는 본인이 사용할 장비를 익히 알뿐만 아니라 하나의 항법 수단만을 전적으로 의존하지 않는다.
Automatic Direction Finder(ADF)
많은 범용항공 항공기는 ADF 무선 수신 장비를 장착한다. ADF를 사용하여 항법을 수행하기 위해선 조종사는 수신 장비를 NDB(nondirectional radio beacon)와 동조해야 한다. NDB 송신국은 보통 200 ~ 415kHz의 저주파나 중파에서 작동한다. 주파수는 항공 차트나 Chart Supplement U.S.에서 쉽게 찾을 수 있다.
compass locators를 제외한 모든 radio beacons는 세 글자의 식별부호를 계속하여 전송한다(단, 음송 송신 도중 제외). ILS와 연관된 compass locator는 두 글자의 식별부호를 전송한다.
또한 standard broadcast stations가 ADF와 함께 사용될 수 있다. 모든 radio stations의 정확한 식별은 매우 중요하며 특히 항법을 위해 standard broadcast stations를 이용하는 경우에는 더더욱 그러하다.
저주파와 중파는 가시선의 영향을 받지 않는다. 신호는 지구의 곡선을 따라 흐르므로 항공기가 송신국의 범위 내에만 있다면 고도에 상관없이 이를 수신할 수 있다.
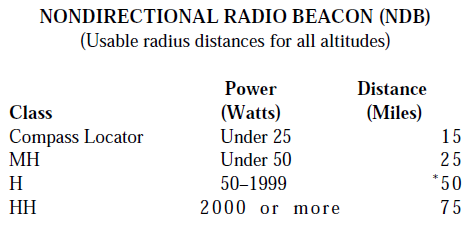
아래의 표는 NDB 송신국의 등급, 출력, 그리고 범위를 제공한다:
* 각 시설의 범위는 50마일보다 적을 수도 있다.
저주파(LF)를 항법에 사용할 때 고려해야할 하나의 단점은 저주파 신호가 전기적 간섭(예를 들어 번개)에 매우 민감하다는 것이다. 이러한 간섭은 엄청난 잡음, needle deviations, 그리고 signal fade를 만들어낸다. 멀리 떨어진 송신국으로부터 간섭이 발생할 수도 있다. 조종사는 이러한 간섭이 발생할 수 있는 조건을 파악함으로써 ADF 사용 시 발생할 수 있는 간섭에 더욱 주의를 기울여야 한다.
기본적으로 ADF는 tuner(원하는 송신국 주파수를 설정하는 장치)와 navigational display로 구성된다.
navigational display는 방위각을 표시하는 dial, 그리고 송신국을 가리키는 needle로 구성된다.
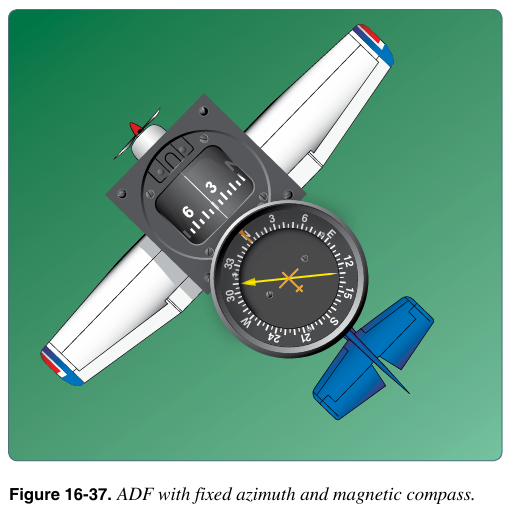
일부 ADF dial의 경우 방위각과 항공기 heading이 정렬되도록 조작이 가능하다. 그 외의 ADF는 항공기의 기수를 나타내는 0과 항공기의 꼬리를 나타내는 180으로 고정된다. 본 교재에서는 fixed azimuth dial만이 논의된다. [그림 16-37]
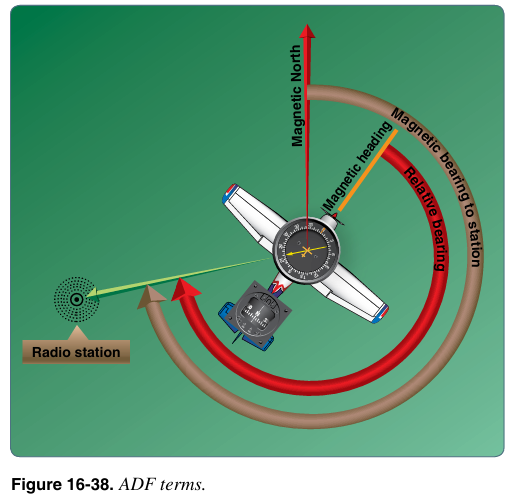
그림 16-38은 ADF와 함께 사용되는 용어들을 나타내며 조종사들은 이를 숙지해야 한다.
magnetic bearing “FROM” the station을 결정하기 위해선 magnetic bearing to the station에서 180을 더하거나 빼야한다. 이것이 reciprocal bearing이다. 이는 position fixes를 차트에 표시할 때 사용된다.
fixed azimuth의 needle은 항공기의 기수를 기준으로 송신국을 가리킨다는. 만약 needle이 relative bearing 330을 가리키고 있다면 송신국은 30도 왼쪽에 위치한다. 만약 항공기가 좌측으로 30도 선회하면 needle이 30도 우측으로 움직여 relative bearing 0을 지시한다. 이는 항공기가 송신국을 향하고 있음을 의미한다. 조종사가 needle이 0인 상태로 송신국을 향하여 계속 비행할 경우 이러한 절차를 homing to the station이라 부른다. 만약 측풍이 존재한다면 ADF needle이 0에서 계속 벗어난다. needle을 0으로 계속 유지하기 위해 항공기를 약간 선회해야 한다. 이는 송신국을 향하여 굴곡진 비행경로를 만들어낸다. homing to the station은 downwind쪽으로 향하는 편류로 인해 송신국을 향한 거리를 늘어나게 만든다.
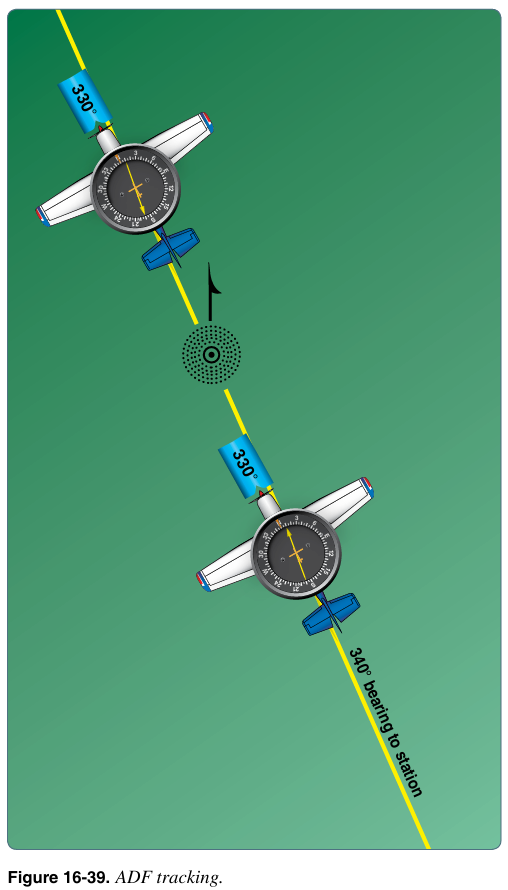
tracking to the station은 편류 수정을 필요로 한다. 이는 송신국을 향한 직진 경로(혹은 bearing to the station)를 따라 비행이 유지되게 만든다. 편류 수정을 설정할 경우 ADF needle은 좌측이나 우측으로 그 수정량을 지시한다. 예를 들어 magnetic bearing to the station이 340일 때 좌측풍을 수정할 경우 magnetic heading 330이 만들어질 것이다. 그리고 ADF needle은 우측 10도(relative bearing 010)를 지시할 것이다. [그림 16-39]
tracking away from the station을 수행하는 경우에도 tracking to the station과 유사한 바람 수정이 적용된다. 허나 ADF needle은 항공기의 꼬리 쪽(azimuth dial의 180도 지점)을 가리킨다. 바람이 불고 있을 때 ADF needle을 180도 지점에 두려할 경우 항공기는 굴곡진 비행경로를 비행하여 결국 원하는 track으로부터 점점 멀어진다.
ADF는 VOR만큼 대중적이지는 않다. 허나 적절한 주의 사항 및 사용법을 숙지한다면 ADF는 유용한 항법 보조 장비가 될 수 있다.
Global Positioning System
GPS는 인공위성을 기반으로 하는 무선 항법 시스템이다. GPS의 RNAV guidance는 전 세계적으로 적용된다. 항공 차트에 GPS에 대한 기호는 없다. 왜냐하면 GPS는 전 세계에 적용되는 우주 기반 시스템이기 때문이다. 현재 GPS가 주요 전자 항법 수단이 될 수 있도록 개발이 진행 중이다. 항공기에 영구적으로 장착되는 GPS 장치 외에도 휴대용 GPS와 yoke-mounted GPS가 큰 인기를 얻고 있다. 광범위한 항법 데이터베이스는 항공기 GPS 수신기의 일반적인 기능이다.
※ 다음은 대한항공 항법 교재를 발췌한 내용이다.
5. 위성항법 (GPS Navigation)
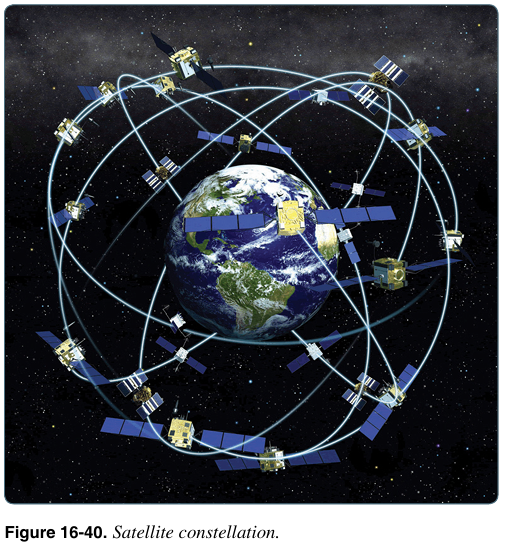
지상 항행안전시설의 위치라는 한계를 극복하고, 기존 항행시스템들 보다 더욱 정확한 위치 정보를 제공하면서 하나의 시스템만으로 전 비행구간을 커버할 수 있도록 하기 위해 개발된 항법시스템이 Global Positioning System(GPS)입니다. GPS는 1950년 대 말부터 개발되기 시작한 미 해군과 공군의 위성항법시스템을 통합하여 1973년에 만들어졌습니다. GPS는 위성들과 지상 기지들의 네트워크로 이루어진 하나의 Space-based 무선 항행시스템입니다. 지구로부터 약 11,000 마일의 고도에서 최소 24개의 GPS 위성들이 6개의 궤도에서 지구를 공전하면서 위치, 속도, 시간 정보를 지구로 보냅니다. 이 정보들을 GPS 수신기를 통해 받아 위치를 파악할 수 있게 되었습니다.
GPS를 VFR/IFR 항법에 사용하기 위해 그 기술적 측면을 이해해야할 필요는 없다. GPS는 기존의 지상 기반 전자 항법과는 상당히 다르며 이러한 차이를 인지하는 것이 중요하다. 장비의 승인 및 한계에 대해 인지하는 것은 비행 안전에 매우 중요하다.
GPS 항법 시스템은 신호를 송출하며수신기는 이를 통해 세계 어디에서나 정확한 위치를 결정할 수 있다. 수신기는 여러 위성을 추적한 다음 의사거리(pseudorange)를 결정하여 사용자 위치를 알아낸다. 정확한 3차원 위치를 설정하기 위해선 최소 4개의 위성이 필요하다.
(출처: 위키백과)
GPS 위성의 상태는 인공위성으로부터 전송되는 메시지의 일부로 송출된다. GPS 상태에 대한 정보는 NOTAM을 통해도 알 수 있다.
GPS 수신기는 GPS constellation으로부터 수신된 신호의 무결성(integrity)을 확인하기 위하여 RAIM(receiver autonomous integrity monitoring)을 사용한다. RAIM은 위성이 오류 정보를 제공하고 있는지를 확인한다. 수신기가 RAIM 기능을 수행하기 위해선 항법에 필요한 위성 외에 최소 1개의 위성이 더 필요하다. 따라서 RAIM이 오류 정보를 감지하기 위해선 최소 5개의 위성이, 혹은 4개의 위성과 한 개의 barometric altimeter(baro-aiding)이 필요하다. 일부 RAIM은 오류 위성 신호를 분리한 다음 이를 navigation solution으로부터 제거하기 위하여 6개의 위성을, 혹은 5개의 위성과 한 개의 baro-aiding을 필요로 한다. baro-aiding이란 위성을 사용하지 않는 입력 장치를 통해 GPS의 무결성을 강화하는 방법이다. 항공기 고도를 결정하기 위해 GPS 고도에 의존해서는 안 된다. 왜냐하면 수직 오차가 꽤 클 수 있으며 무결성이 제공되지 않기 때문이다. baro-aiding을 사용하기 위해선 altimeter setting을 수신기에 입력해야 한다.
RAIM 메시지는 수신기마다 다소 차이가 있지만 일반적으로 두 가지 형식을 가진다. 하나는 RAIM integrity monitoring을 제공하기 위해 사용할 수 있는 위성이 충분하지 않음을 나타낸다. 다른 하나는 RAIM integrity monitor가 현재 비행구간에 대한 한계를 초과하는 잠재적 오류를 감지하였음을 나타낸다. RAIM 기능이 없다면 조종사는 GPS 위치의 정확성을 확신할 수 없다.
Selective Availability
SA(selective availability)는 의도적으로 GPS의 정확성을 저하시키는 방법이다. 이러한 기능은 정밀한 GPS 위치 정보의 악이용을 금지하기 위해 설계되었다. SA는 2000년 5월 1일에 중단되었다. 허나 많은 GPS 수신기들은 여전히 SA가활성화된 상태라 간주하고 설계된다.
baseline GPS satellite constellation은 지구를 중심으로 하는 6개의 궤도면에 위치한 24개의 위성으로 구성된다. 각 궤도면은 4개의 작동 위성과 한 개의 예비 satellite slot을 가진다. 시스템은 최대 30개의 위성으로 구성된 constellation을 지원할 수 있다. GPS 위성의 공전 주기는 11시간 58분이다. 궤도는 거의 원형에 가깝고, 적도를 중심으로 60도의 일정한 간격을 두며, 적도를 기준으로 55도 기울어져있다. 궤도의 반지름(즉, 지구의 질량 중심으로부터 위성까지의 거리)은 약 26,600km이다.
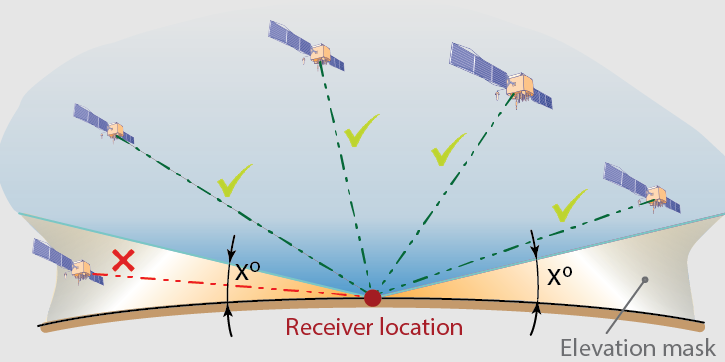
baseline satellite constellation을 통해 사용자는 최소 4개의 위성을 사용할 수 있다. 위성은 거리 신호와항법 정보를 방송하며 수신기는 위치, 속도, 그리고 시간을 측정하기 위해 이를 통해 의사거리를 측정한다. 수신기는 mask angle(수신기가 위성을 사용할 수 있는 수평선으로부터의 최저 각도) 위에 놓인 최소 4개의 위성 정보를 사용한다. 특정 시간에 작동하는 정확한 위성 개수는 궤도에 존재하는 중단 위성의 개수와 예비 위성의 개수에 따라 달라진다. [그림 16-40]
(mask angle)
VFR Use of GPS
GPS 항법은 VFR 조종사의 항법 능력을 향상시키고, 상황 인식을 강화시키며, 운영비용을 절감해준다. GPS가 VFR 조종사에게 많은 이점을 제공하긴 하지만 시스템의 성능이 초과되지 않도록 주의해야 한다.
VFR 항법에 사용되는 GPS 수신기는 fully integrated IFR/VFR installation부터 hand-held devices까지 다양하다. 조종사는 항법 정보의 오용을 피하기 위하여 수신기의 사용법과 제한을 알아야 한다. VFR 조종사는 어떤 경우에도 하나의 항법 시스템만을 의존해선 안 된다. GPS 항법은 다른 유형의 전자 항법뿐만 아니라 지문 항법, 그리고 추측 항법과 함께 사용되어야 한다. 이를 통해서만 VFR 조종사는 항법의 정확성을 보장할 수 있다. GPS 사용 시 고려해야 할 몇 가지 중요한 사항으로는 RAIM 기능, 데이터베이스 유효기간, 그리고 안테나 위치가 포함된다.
RAIM Capability
많은 VFR GPS receivers와 hand-held units가 RAIM 경고 기능을 갖추지 않는다. 이러한 수신기들은 필요한 수의 위성이 사용될 수 없음을, 혹은 위치 오류가 감지되었음을 조종사에게 표시할 수 없다. RAIM 기능이 없는 수신기는 navigation solution이 저하되어 항법 오류가 발생할 수 있다는 경고를 조종사에게 제공하지 않는다. 다른 항법 기술과의 체계적인 cross-check을 수행할 경우 이러한 오류를 식별하여 심각한 편차를 방지할 수 있다.
많은 수신기들은 업데이트가 가능한 데이터베이스를 사용한다. 이는navigation fixes, airports, 그리고 instrument procedures를 위해서이다. IFR 운영의 경우 이러한 데이터베이스를 최신 상태로 유지해야 한다. 그러나 VFR 운영에서는 그러한 조건이 없다. 허나 대부분의 데이터베이스는 moving map display를 작동시키는데, 이는 Special Use Airspace와 다양한 등급의 공역들을 표시한다. 최신 데이터베이스가 없다면 moving map display는 오래전 정보를 표시할 수 있다. 이는 중요한 공역(예를 들어 제한공역이나 B등급 공역) 주변을 비행하려는 VFR 조종사에게 잘못된 정보를 제공할 수 있다. 오래된 데이터베이스를 사용할 경우 본인이 피하고자 의도하였던 공역에 진입할 수 있다. 중요한 항법 결정을 내릴 때 만약 최신 데이터베이스가 없다면 moving map display는 무시한다.
또한 운영 목적을 위해 필요 하다면 waypoint를 추가, 제거, 재배치, 혹은 개명할 수 있다. named fix와 관련하여 GPS로 항법을 수행할 경우 최신 데이터베이스를 사용하여 해당 waypoints를 찾아야 한다. 업데이트가 되어있지 않다면 공식적인 최신 자료(예를 들면 sectional chart, 혹은 en route chart)를 참조하여 waypoint 위치를 확인해야 한다.
VFR installations의 경우 안테나는 보통 성능보다는 편리성에 따라 배치된다. 허나 IFR installations의 경우에는 안테나가 위성과 통신할 수 있도록 충분한 시야가 확보되어야한다. 그 외의 위치가 사용될 경우 항공기의 일부분이 안테나의 시야를 차단하여 항법 신호가 손실될 가능성을 증가시킨다.
이는 hand-held receivers의 경우 더욱 그러하다. VFR 운영을 위해 hand-held receivers를 사용하는 것이 증가하는 추세이다. 일반적으로 GPS 안테나를 항공기 창문의 안쪽에 두기 위하여 흡착판이 사용된다. 이 방법은 유용성이 크긴 하지만 안테나의 위치가 항공기 구조에 의해 제한된다. 그 결과 항공기와 위성간의 기하학적 구조가 항법 신호의 손실을 야기하는 특정 상황에서는 신호 중단이 발생할 수 있다. 이러한 항법 신호 중단이 RAIM 기능의 부재와 결부될 경우 조종사는 아무런 경고도 없이 잘못된 위치 정보와 항법 정보를 제공받을 수 있다.
VFR 운영을 위해 hand-held GPS receivers를 사용하는 것은 규정에 의해 제한되지 않는다. 허나 항공기의 개조(예를 들어 panel mounted holder나 yoke mounted holder를 설치하는 것)는 14 CFR part 43에 의해 규제된다. 조종사들은 규정의 준수 및 안전한 설치를 위해 정비사와 상의해야 한다.
Tips for Using GPS for VFR Operations
항상 장비의 RAIM 기능 여부를 확인한다. RAIM 기능이 없을 때 만약 GPS에 표시된 위치가 다른 무선 항법 시스템, 지문항법, 혹은 추측항법으로 결정된 위치와 차이가 있을 경우 GPS 위치를 의심한다.
데이터베이스의 유효기간을 확인한다. 만약 만료되었다면 최신 버전을 사용하여 데이터베이스를 업데이트한다. 만약 만료된 데이터베이스를 업데이트 할 수 없다면 중요한 항법 결정에 대하여 moving map display를 사용하지 않는다. 데이터베이스 만료 후 named waypoint가 더 이상 존재하지 않을 수도 있으며 재배치되었을 수도 있다. 사용을 의도하는 waypoints는 최소한 최신 공식 출처(예를 들어 Sectional Aeronautical Chart)와 비교를 통해 확인되어야 한다.
hand-held GPS receiver는 VFR 조종사에게 훌륭한 항법 성능을 제공할 수 있다. 허나 간헐적으로 항법 신호가 중단될 수 있으며 조종사에게 RAIM 경고가 표시되지 않을 수 있으므로 이에 대비해야 한다. 항공기에 수신기를 설치하는 경우 14 CFR 43을 반드시 준수한다.
이륙 전에 비행 계획을 면밀히 세운다. user-defined waypoints로 항법을 수행하는 경우 waypoint들을 비행 도중 입력하지 말고 비행 전에 입력한다. 계획하는 비행을 최신 출처(예를 들어 최신 sectional chart)와 비교하여 확인한다. 본인이 아닌 다른 조종사가 만든 waypoints를 사용하는 경우도 있다. 이는 보통 항법 오류로 이어진다. 항공기 내부를 바라보는 시간을 최소화하고 항적∙지형∙장애물을 면밀하게 확인한다. 지상에서 수행한 몇 분의 준비 및 계획만으로도 공중에서 큰 차이를 만들 수 있다.
항공기 내부를 바라보는 시간을 최소화하는 또 다른 방법은 수신기의 작동에 매우 익숙해지는 것이다. 대부분의 수신기는 직관적이지 않다. 조종사는 수신기 조작에 사용되는 다양한 keystrokes, knob functions, 그리고 displays를 학습하는 시간을 가져야 한다. 일부 제조업체는 수신기의 컴퓨터 기반 튜토리얼이나 시뮬레이션을 제공한다. 특정 장치를 비행 도중 사용해보기 전에 시간을 내어 이를 배워본다.
모든 VFR 항법 문제들을 해결하기 위해 GPS를 의존하지 않도록 주의한다. IFR 조건에 따라 IFR 수신기를 설치하지 않는 한 정확도나 무결성 기준이 보장될 수 없다. GPS의 실용성이 크긴 하나 이는 그저 조종사의 수단들 중 하나에 불과하다는 사실은 변함이 없다.
VFR Waypoints
area navigation receivers를 갖춘 항공기로 시계 항법을 수행하는 경우 VFR waypoint는 조종사에게 위치 인식을 지원하는 보조 수단을 제공한다. VFR waypoints는 항법 절차를 보완하는 수단으로 사용되어야 한다. VFR waypoints의 용도는 다음과 같다: 해당 지역에 익숙하지 않은 조종사에게 항법 보조 수단 제공, 기존 reporting points의 waypoint 규정, B∙C등급 공역 안팎에서의 항법 향상, 그리고 Special Use Airspace 주변에서의 항법 향상.
그 지역에 익숙하지 않은 조종사를 위한 항법 보조 장치 제공, 기존 reporting points의 waypoint 정의, B 등급 공역과 C 등급 공역 내외에서의 항법 증진, 특수 사용 공역(Special Use Airspace) 주변에서의 항법 증진을 포함한다. VFR 조종사들은 시계 항법을 위해 특별히 발행된 최신 항공 차트를 사용해야 한다. terminal area를 운항하는 경우에는 해당 지역에 대해 이용 가능한 Terminal Area Chart를 사용해야한다. VFR waypoints를 사용한다 하여 14 CFR part 91의 운영 조건을 준수할 책임이 면제되는 것은 아니다.
VFR waypoint의 명칭은 “VP”로 시작되는 5개의 문자로 구성되며 이를 항법 데이터베이스에서 검색할 수 있다. VFR waypoint의 명칭은 발음할 수 있도록 고안되지 않았으며 ATC 교신에 사용될 수 없다. VFR charts에서 stand-alone VFR waypoint는 IFR waypoint에서 사용되는 별 모양 기호를 사용한다. 차트의 visual checkpoint와 결합된 VFR waypoint는 작은 자홍색 깃발 기호로 식별된다. visual checkpoint와 결합된 VFR waypoint는 발음이 가능하며 ATC 교신에 사용될 수 있다. 각 VFR waypoint의 명칭은 괄호 안에 표시된다.
다음과 같은 경우에는 VFR 비행 계획서의 route of flight에 waypoint 명칭을 사용한다: 해당 지점에서 course 변경을 의도하는 경우, 혹은 계획된 비행경로를 설명하기 위해 해당 지점을 사용하는 경우. 이는 route of flight에서 VOR을 사용하는 것과 유사하다. 조종사는 VFR conditions를 운영하는 경우에만 VFR waypoints를 사용해야 한다.
비행 도중 사용하고자 하는 VFR waypoints를 출항 전에 수신기에 입력해야 한다. 이륙한 후에는 경로나 VFR waypoints를 수신기에 입력하는 것을 피해야 한다.
VFR waypoints 근처를 운항하는 도중에는 다른 항적을 특히 주의해야 한다. VOR이나 NDB 근처를 운항할 때와 마찬가지로 VFR waypoints 근처에서는 다른 항공기를 see and avoid 하려 노력해야 한다. 사실 GPS를 통해 항법 정확도가 높아지면서 더 많은 경계가 필요해졌다. 왜냐하면 다른 항공기들 간의 off-course deviations가 줄어들었기 때문이다. VFR waypoint 부근을 운항하는 도중에는 이용 가능한 모든 ATC 서비스를 사용해야 한다(설령 교신이 요구되는 공역 등급이 아니라 하더라도). 근처를 운항중인 항적 정보를 위해 이용 가능한 ATC 주파수를 면밀히 모니터링 한다(공역의 등급에 상관없이). 또한 VFR waypoints 근처를 운항하는 도중에는 landing light(s)를 켜서 다른 조종사가 항공기를 더 잘 볼 수 있도록 하는 것이 좋다(특히 시정이 감소된 경우).
비행 도중 길을 잃는 것은 잠재적으로 위험한 상황이다(특히 연료가 부족한 경우). 조종사가 길을 잃었을 때 따라야 할 몇 가지 일반적인 절차가 있다. 만약 마을이나 도시가 보이지 않는다면 먼저 상승하라. 고도가 높아지면 라디오 및 항법 수신 범위가 넓어지며 레이더 수신 범위도 증가한다. 마을이나 도시 근처를 비행하는 경우에는 급수탑에서 마을의 명칭을 확인할 수도 있다.
항공기가 항법 라디오(예를 들어 VOR이나 ADF 수신기)를 갖추고 있다면 두 개 이상의 항법 시설들로부터 방위각을 구하여 위치를 파악할 수 있다. 항공기에 GPS가 있다면 이를 사용하여 현재 위치와 가장 가까운 공항 위치를 파악할 수 있다.
sectional chart에 표시된 주파수를 사용하여 이용 가능한 시설과 교신한다. 관제사와 교신이 이루어진 후 radar vectors를 제공받을 수도 있다. 다른 시설들은 direction finding(DF) 지원을 제공할 수도 있다. 이 절차를 위해 관제사는 조종사에게 송신 버튼을 몇 초간 누르고 있으라 요청한다. 관제사는 조종사에게 방향을 몇 번 변경하도록, 그리고 송신 절차를 반복하도록 요청할 수 있다. 이를 통해 관제사는 항공기 위치를 파악한 다음 적절한 착륙장으로 향하는 vector를 제공할 수 있다. 만약 상황이 좋지 않다면 비상 주파수(121.5 MHz)로 상황을 송신하고 트랜스폰더를 7700으로 설정한다. 대부분의 시설들은 비상 주파수를 모니터링 한다.
조종사가 원래 의도하였던 목적지에 도착하지 못하는 경우가 발생할 수 있다. 이는 예상치 못한 기상 조건, 시스템 오작동, 혹은 잘못된 비행 계획으로 인하여 발생할 수 있다. 어떤 경우든 조종사는 안전하고 효율적으로 대체 목적지로 회항해야 한다. 회항 도중 risk management procedures가 사용되어야 한다. cross-country 비행 전에 차트를 참조하여 비행경로 근처에 공항이나 적절한 착륙장이 있는지를 확인한다. 또한 회항 도중 사용할 수 있는 항법 보조 장치가 있는지도 확인한다. risk management는 Chapter 2, Aeronautical Decision-making에서 자세히 설명되어 있다.
비행 도중 경로, 시간, 속도, 그리고 거리 정보를 구하기 위해선 비행 전 계획 도중 사용하였던 계산 방식을 필요로 한다. 허나 조종실 공간은 제한적이며 항공기 조종∙계산 수행∙항적 스캐닝에 주의를 분배해야 하므로 모든 rule-of-thumb 계산 방식을 활용한다.
비행 도중 sectional chart에 course, checkpoints, 그리고 거리를 표시하는 것은 현실적으로 불가능하다. 또한 교체비행장은 일반적으로 기존 경로로부터 그리 멀지 않으므로 실제 경로를 그릴 필요는 없다.
교체비행장까지의 course를 각도기나 plotter로 정확하게 측정할 수 있긴 하지만 VOR stations 주변에 표시된 compass rose와 straightedge를 통해서도 합리적 측정이 가능하다. 이러한 측정은 인근 VOR의 radial을 기준으로, 혹은 교체비행장으로 향하는 course와 평행한 airway를 기준으로 수행될 수 있다. 허나 VOR radial이나 airway와 관련된 magnetic heading은 outbound를 기준으로 하는 점을 기억하라. 송신국으로 향하는 course를 찾기 위해선 해당 heading의 역방향을 결정해야 한다. 일반적으로 VOR이나 NDB 시설을 갖춘 교체비행장으로 항행하는 것이 더 쉽다.
가장 적절한 대체 목적지를 선택한 후 sectional chart의 compass rose나 airway를 사용하여 대체 목적지까지의 magnetic course를 구한다. 시간이 된다면 눈에 잘 띄는 지형지물의 상공에서 회항을 시작한다. 허나 비상 상황이라면 즉시 대체 목적지를 향하여 회항을 시작한다. 모든 작도, 측정, 그리고 계산을 완료한 다음 회항을 시작하려 시도할 경우 비상 상황이 더욱 악화될 수 있다.
course에 설정된 후 시간을 기록한다. 그런 다음 회항 지점 근처에서의 바람 정보를 사용하여 heading과 GS를 구한다. GS가 결정되면 새로운 도착 시간과 연료 소비량을 계산한다. 주의를 분배하는 동안 항공기 제어를 우선순위로 둔다. 우회 도중 사용할 고도를 결정할 때 구름 높이, 바람, 지형, 그리고 라디오 수신을 고려하라.
이 장은 VFR 항법의 기초에 대하여 설명하였다. 항법에 사용할 수 있는 차트를 시작으로 진보된 개념인 GPS까지 소개되었다. 모든 항법들의 한 가지 측면은 동일하게 유지되는데, 바로 조종사는 안전한 비행을 보장하기 위해 적절한 계획을 세우고 그 계획을 실행할 책임을 가진다는 것이다.
7-1-1. National Weather Service Aviation Weather Service Program
a. 항공 기상 서비스는 NOAA(National Oceanic and Atmospheric Administration), NWS(National Weather Service), FAA(Federal Aviation Administration), DOD(Department of Defense), 그리고 다양한 민간 항공 기상 서비스 제공업체의 공동 노력을 통해 이루어진다. 모든 항공 기상 정보에 대한 조건들은 FAA에서 비롯된다.
b. NWS 기상학자는 모든 ARTCC(air route traffic control centers)와 ATCSCC(Air Traffic Control System Command Center)에 배치되어 있다. 기상학자들은 FAA와 그 외 NAS 사용자들의 요구를 지원하기 위해 전문 브리핑과 맞춤형 예보를 제공한다.
c. Aviation Products
1. NWS는 광범위한 지표면∙상공∙레이더 기상 관측 프로그램을, 그리고 전국적인 항공 일기 예보 서비스를 운영한다.
2. NWS가 지원하는 공항 관측 자료(METAR와 SPECI)는 automated observing systems에 의해 제공된다.
3. TAF(Terminal Aerodrome Forecasts)는 24시간, 혹은 30시간 동안 유효하며 필요에 따라 수정된다.
4. Inflight aviation advisories(예를 들어 SIGMETs, 그리고 AIRMETs)는 세 개의 NWS MWO(Meteorological Watch Offices)에서 발부된다. 이들은 특정 지역에 대한 area forecasts를 발부한다. 또한 대부분의 ARTCC에 배치된 NWS 기상학자들은 CWAs(Center Weather Advisories)를 제공한다.
5. 몇몇 NWS NCEP(National Centers for Environmental Production)는 특정 일기 예보를 제공하거나, 혹은 조종사가 관심을 가질 만한 public forecasts를 선정한다.
(a) AWC(Aviation Weather Center)는 aviationweather.gov를 통해 다양한 국내 및 국제 항공 예보 정보를 표시한다.
(ATP: AWC는 GTG(Graphical Turbulence Guidance)를 발부한다. 이는 상층 전선(upper-level fronts), 그리고 제트기류와 관련된 CAT(Clear Air Turbulence)의 발생 가능성 정보를 컴퓨터로 생성한 4차원 예보이다. 해당 예보는 매시간 업데이트 된다. 그리고 00Z시부터 3시간마다 6 · 9 ·12시간 예보가 포함된다.)
(b) NCO(NCEP Central Operations)는 numerical weather prediction models의 운영을 담당하고 있다.
(c) SPC(Storm Prediction Center)는 토네이도와 악기상에 대한 주의보를 기타 안내 예보와 함께 발부한다.
(ATP: SPC는 convective outlooks(AC)를 발부한다. 이는 다음 8일 동안의 뇌우 활동에 대한 전망을 제공한다. 악천후의 위험도는 HIGH, MODERATE, ENHANCED, SLIGHT, 그리고 MARGINAL로 구분된다.)
(d) NHC(National Hurricane Center)는 열대성 기상(예를 들어 허리케인)에 대한 에보를 발부한다.
(e) SWPC(Space Weather Prediction Center)는 지구 환경에 영향을 미칠 것으로 예상되는 우주 기상 현상(예를 들어 태양 폭풍)에 대한 경보, 주의보, 경고, 그리고 예보를 제공한다.
(f) WPC(Weather Prediction Center)는 전국 규모의 분석 및 예보 정보를 제공한다(지표면 기압 분석과 전선 분석 포함).
6. NOAA는 두 개의 VAAC(Volcanic Ash Advisory Centers)를 운영한다. 이들은 관할 지역 내 화산재 구름에 대한 예보를 발부한다.
7. 위에 나열된 정보들에 대한 자세한 내용은 FAA Advisory Circular 00-45, Aviation Weather Services에서 확인할 수 있다.
d. 기상 요소들은 여러 요인들(예를 들어 기상 정보가 일반 대중들에 의해 사용되는지, 항공 종사자에 의해 사용되는지, 혹은 국제 서비스에 의해 사용되는지)로 인해 서로 다른 측정 시스템들을 통해 표현될 수 있다. 그림 7-1-1은 가장 자주 사용되는 기상 요소들의 conversion tables를 제공한다.