Navigation in the Arrival Environment
가장 중요한 항행 조건은 항공기를 안전하게 분리해야 한다는 것이다. non-radar environment의 경우 ATC는 항적들을 분리할 수 있는 자체적 수단이 없다. 따라서 ATC는 항공기의 실제 위치 및 고도를 결정하기 위하여 조종사가 제공하는 정보를 전적으로 의존해야 한다. 이 경우 ATC가 분리를 제공하기 위해선 정확한 항법이 필수적이다.
심지어 radar environment에서도 특정 상황의 경우 정확한 항법 및 위치 보고가 여전히 분리를 제공하는 주요 수단이다. 대부분의 상황에서 ATC는 항공기의 항법을 책임지지 않는다. ATC는 조종사들의 정확한 항법에 의존하므로 모든 IFR operations 도중 비행 안전은 특정 수준의 항법 성능을 달성 및 유지하는 조종사의 능력에 달려있다. ATC는 레이더를 사용하여 항법 성능을 감시하고, 항법 오류의 가능성을 감지하며, 교통 흐름을 신속하게 처리한다. non-radar environment의 경우 ATC는 항공기의 실제 위치, 혹은 다른 항공기와의 관계에 대한 자체적 수단이 없다. 따라서 clearance로부터 편차가 발생할 경우 항법 오류를 감지하는, 그리고 충돌 위험을 해결하는 ATC의 능력이 심하게 저하된다.
항법 성능의 개념은 특정 경로 및 고도에 대해 유지되어야 하는 정밀도를 포함한다. 항법 성능의 수준은 항적의 양, 그리고 비행경로의 복잡성에 따라 지역마다 다르다. 항법 성능의 수준은 대양이나 외딴 육지보다 국내 공역에서 더 정밀해야 한다. 왜냐하면 국내 공역의 항적 밀도가 훨씬 더 높기 때문이다.
항법 성능의 개념은 14 CFR Part 121.103과 121.121에 규정되어 있다(각 항공기는 ATC에 필요한 수준의 정확도로 항행해야 함). 14 CFR Part 91.123의 조건들도 이러한 기본 개념을 반영한다. commercial operators는 본인의 운영기준을 준수해야 하고, navigational operations의 범주를 이해해야 하며, ATC에 필요한 수준의 정확도로 항행할 수 있어야 한다.
navigational operations는 두 가지 범주로 나뉜다: Class I navigation, 그리고 Class II navigation. Class I navigation은 ICAO standard NAVAIDs(VOR, VOR/DME, NDB, 등등) 서비스 범위 내의 관제공역이나 비관제공역에서 수행되는 모든 en route operation을 의미한다.
Class II navigation은 Class I navigation으로 분류되지 않는 모든 en route operation으로 여기는 ICAO standard NAVAIDs의 서비스 범위 바깥에서 이루어지는 모든 운영이나 운영의 일부를 포함한다. 예를 들어 VOR만을 갖춘 항공기가 federal VORs의 서비스 범위 바깥을 운항하는 경우 해당 항공기는 Class II navigation을 수행한다. Class II navigation이 자동으로 장거리 특수 항법 시스템을 요구하지는 않는다. 특수 항법 기술이 conventional NAVAIDs를 보완하는 경우에는 이러한 NAVAIDs를 통해 Class II navigation을 수행할 수 있다. Class II navigation은 대양을 횡단하는 운항을, 그리고 외딴 육지에서의 운항(예를 들어 북극)을 포함한다. Class II operations에 승인된 특수 항법 시스템의 유형에는 INS(inertial navigation system), Doppler, 그리고 GPS(global positioning system)가 있다. 그림 3-1은 Class I/Class II navigation의 몇 가지 예시를 제공한다.

Descent Planning
순항으로부터의 하강을 계획하는 것은 중요하다. 왜냐하면 올바르게 구성된 상태로 approach gate에 도달하기 위해 대기속도와 고도를 소멸시켜야하기 때문이다. 너무 이르게 하강할 경우 낮은 고도에서의 비행시간이 증가하여 연료 소모가 증가한다. 반면 너무 늦게 하강할 경우 접근 도중 대기속도와 하강률을 제어하는데 문제가 발생한다. 비행 전에 조종사는 특정 계기 접근에 대해 cruising altitude로부터 approach gate altitude까지 하강하는데 필요한 연료, 시간, 그리고 거리를 계산해야 한다. 하강 전에 조종사는 목적지의 기상(바람 정보 포함)을 확인해야 한다. 목적지 공항의 기상이 좋지 않을 경우 하강이 느려지거나, 혹은 실패접근이 필요할 수 있다. 이들은 충분한 양의 연료를 필요로 하므로 하강을 시작하기 전에 계산되어야 한다. 하강을 계획하기 위해 조종사는 cruise altitude, approach gate altitude나 initial approach fix altitude, descent groundspeed, 그리고 descent rate를 알아야 한다. 비행 도중 고도, 기상, 그리고 바람의 변화에 따라 이러한 정보들을 업데이트해야 한다. approach gate는 ATC가 항공기를 final approach course로 vector 하는데 사용하는 가상의 지점이다. approach gate는 final approach course를 따라 FAF(final approach fix)로부터 1NM(공항 반대편으로) 떨어진 지점에 설정되며 landing threshold로부터 5NM 이내에 위치해서는 안 된다.
자주 사용되는 기법 중 하나는 descent rule of thumb이다. 이는 새로운 고도에 도달하고자 하는 지점까지의 거리를 기준으로 하강 시점을 결정하는데 사용된다. 먼저 하강해야 하는 고도를 300으로 나눈다. 예를 들어 cruising altitude(7,000ft)에서 pattern altitude(1,000ft)로 하강하는 경우 6,000ft의 고도 손실이 필요하다. 이를 300으로 나누면 20이 된다. 따라서 20NM 전에 하강을 시작해야 한다. 또한 어떤 ROD(rate-of-descent)가 사용되어야 하는지를 알아야 한다.
3도 경로에 대한 ROD를 결정하기 위해선 groundspeed에 5를 곱하면 된다. 120knots로 비행하는 경우 원하는 경로를 비행하기 위한 ROD는 600fpm(120 x 5 = 600)이 된다. 이전 예시에서 6,000ft의 고도 손실을 위해선 20NM 지점에서 하강을 시작해야 한다고 결정하였다. groundspeed가 120knots인 경우 이는 항공기가 분당 2NM을 이동함을 의미한다. 따라서 20NM을 이동하기 위해선 10분이 걸린다. 600fpm으로 10분을 이동한다는 것은 6,000ft가 손실된다는 것을 의미한다.
이러한 계산이 비행 전에 이루어져야 하며 비행 도중 rules of thumb가 업데이트 되어야 한다. 예를 들어 조종사는 STAR의 “cross 40 DME West of Brown VOR at 6,000”이라는 expected clearance를 기준으로 하강을 계획한 다음 250노트로부터의 감속을 위하여 rule of thumb를 적용할 수 있다. 여기에는 특정 지점에서의 대기속도 계획이 포함될 수 있다(예를 들어 runway threshold로부터 25NM 지점에서는 250knots, 20NM 지점에서는 200knots, 그리고 15NM 지점에서는 150knots).
Vertical Navigation(VNAV) Planning
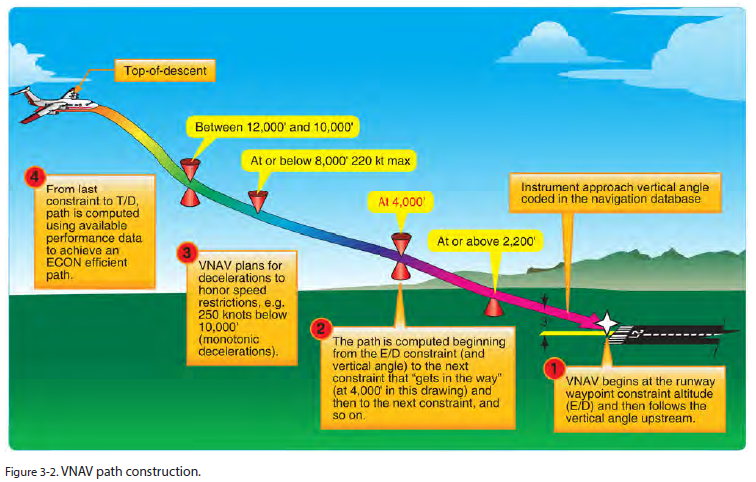
VNAV는 flight plan의 수직 구성 요소이다. 접근 경로는 TOD(top-of-descent) point에서 E/D(end-of-descent) waypoint(이는 보통 활주로, 혹은 MAP임)까지 계산된다(non-FMS aircraft의 경우 approach gate까지 계산됨). VNAV path는 항공기 성능, approach constraints, 기상 정보(바람, 온도, 착빙 조건, 등등), 그리고 항공기 무게를 기반으로 계산된다.
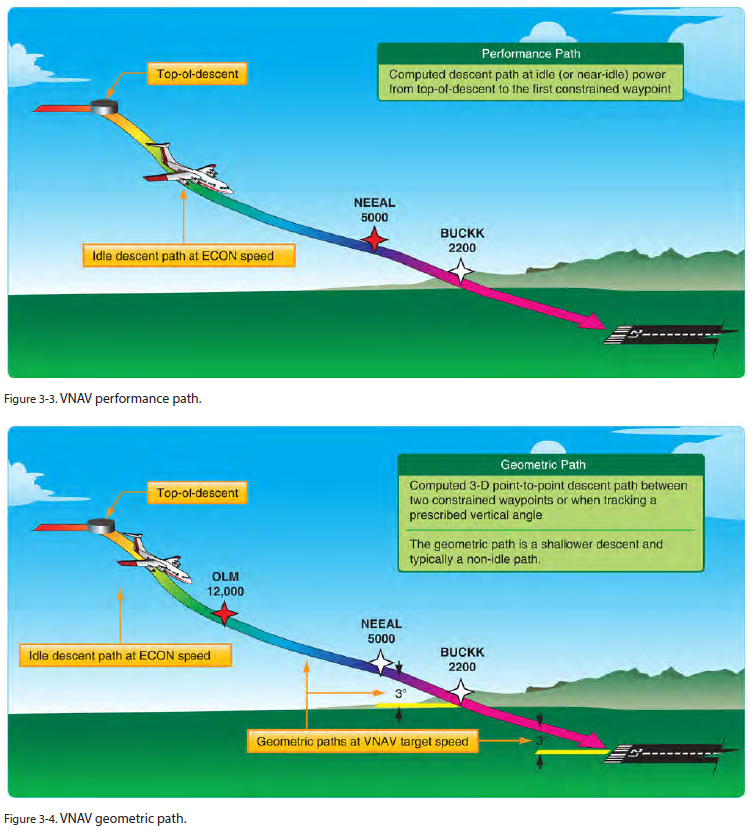
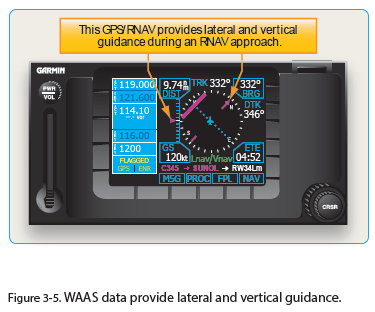
FMS가 사용하는 두 가지 유형의 VNAV paths는 performance path, 혹은 geometric path이다. performance path는 idle(혹은 near idle) power를 이용하여 TOD에서 첫 번째 constrained waypoint까지 계산된다. [그림 3-3] geometric path는 두 개의 constrained waypoints 사이에서, 혹은 특정 vertical angle에서 point-to-point descent로 계산된다. geometric path는 performance path보다 얕으며 보통 non-idle path이다. [그림 3-4]
LNAV/VNAV Equipment
lateral navigation/vertical navigation(LNAV/VNAV) equipment는 측면 접근 경로 안내와 수직 접근 경로 안내를 모두 제공한다는 점에서 ILS(instrument landing system)과 유사하다. LNAV/VNAV minimums를 사용하는 접근은 baro-VNAV(barometric VNAV) systems 및/혹은 WAAS(wide area augmentation system)을 사용한다.
Note: WAAS는 GPS로부터 발생한 위치 정보의 부정확성을 탐지 및 수정하는데 사용되는 지상국들을 활용한다. WAAS를 통해 수직 위치 정보의 정확도가 3m 이내로 향상된다.
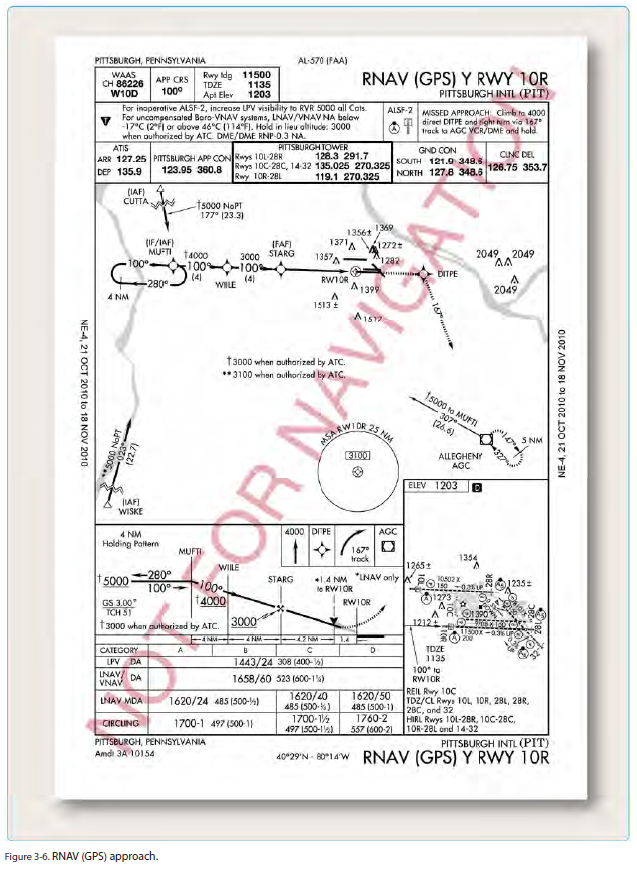
WAAS를 사용하기 위해선 WAAS 신호 수신 기능을 갖춘 IFR-approved GPS receiver를 장착해야 한다. 이는 WAAS의 오류 보정 신호를 위치 결정 절차에 통합한다. WAAS를 지원하는 GPS 수신기를 통해 조종사는 RNAV approach를 로딩할 수 있으며 접근 차트에 표시된 lateral/vertical profile을 따라 안내를 받을 수 있다. [그림 3-5 및 3-6] 항공기에 어떤 종류의 장비가 설치되어 있는지, 그리고 어떤 용도가 승인되어 있는지를 파악하는 것은 매우 중요하다. 또한 WAAS 기능이 없는, 혹은 WAAS를 갖추지 않은 IFR approved GPS receivers의 VNAV 기능을 통해 항공기가 LNAV/VNAV minimums를 비행할 수 있는 것은 아니라는 점을 이해해야 한다.
FMS는 대부분의 최신 항공기, 항공사, 그리고 performance based navigation을 필요로 하는 모든 운영자들의 주된 수단이다. 대부분의 최신 FMS는 LNAV/VNAV와 WAAS를 갖추고 있다. FMS는 VNAV path를 따라 flight control steering을, 그리고 thrust guidance를 제공한다. 일부 시스템은 VNAV path만을 알려줄 뿐 auto-throttle 기능은 갖추지 않을 수 있다. 이러한 시스템의 경우 arrival/approach 구간 도중 하강 경로를 유지하기 위한 조종사 업무량이 증가한다.
Descent Planning for High Performance Aircraft
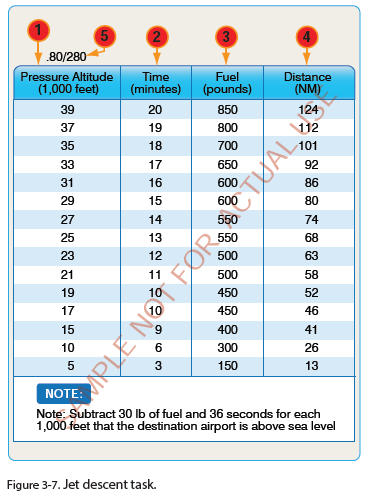
turbojets의 경우 비행 전 계획 도중 approach gate 및 airport environment로의 IFR descent를 계획하는 것이 특히나 중요하다. 이때 high performance aircraft를 위한 TOD가 사용되며 이는 approach gate 고도를 기초로 직접 계산되거나, 혹은 FMS를 통해 자동으로 계산된다. 제트 항공기의 initial IFR descent planning을 위한 일반적인 rule of thumb는 3 : 1 법칙이다. 이는 1,000ft를 하강하는데 3NM이 소요됨을 의미한다. 비행기가 FL 310에 있으며 approach gate나 initial approach fix가 6,000ft에 있다면 initial descent에 25,000ft(31,000 – 6,000)가 필요하다. 25에 3을 곱하면 75가 된다. 따라서 normal jet airplane, idle thrust, speed Mach 0.74 ~ 0.78, 그리고 VS 1,800 ~ 2,200 fpm을 기반으로 approach gate로부터 75NM 지점에서 하강을 시작한다. 배풍이 부는 경우 배풍 10knots 당 2NM을 더한다. 정풍이 부는 경우 정풍 10knots 당 2NM을 뺀다. descent planning 도중 최신 METAR(aviation routine weather report)나 ATIS(automatic terminal information service)를 통해 목적지 공항에서 사용 중인 활주로를 확인한다. 현재 사용 중인 활주로, 그리고 STAR에 따라 거리가 크게 달라질 수 있다. 그 목표는 가장 경제적인 하강 지점을 결정하는 것이다.
normal jet descent-planning chart의 예시가 그림 3-7에 나타나 있다. 1번 항목은 하강이 시작되는 기압 고도를, 2번 항목은 하강에 필요한 시간을, 3번 항목은 해수면까지 하강하는 도중 소비되는 연료량을, 그리고 4번 항목은 비행거리를 나타낸다. 5번 항목은 Mach 0.80의 대기속도를 기준으로 함을(단, 280KIAS에 도달하기 전까지) 의미한다. 10,000ft MSL 미만에서의 속도 제한(250knots)의 경우 그 영향이 미미하므로 차트에 포함되지 않는다. 또한 온도나 무게의 변화로 인한 영향은 무시할 수 있는 수준이므로 생략되었다.
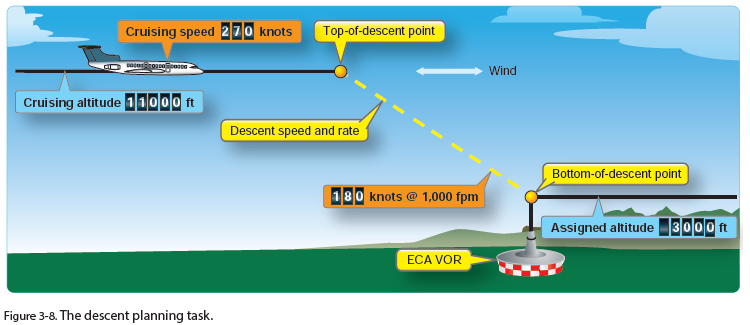
순항 및 하강 도중 조종사는 해당 제조업체의 권장 사항에 맞춰 항공기를 관리해야 한다. flight manuals와 operating handbooks에는 cruise/descent checklists, 특정 순항 외장에 대한 performance charts, 그리고 descent charts(하강에 필요한 연료, 시간, 그리고 거리에 대한 정보를 제공하는 차트)가 포함되어 있다. 조종사들은 매 비행 전에 이러한 정보를 검토함으로써 항공기가 순항 및 하강 도중 어떻게 운항되어야 하는지를 알아야 한다. stabilized descent란 적절한 하강 경로를 유지하기 위하여 적절한 출력을 설정하고, 최소한의 조종간 입력을 적용하는 preplanned maneuver를 의미한다. 과도한 조종간 입력이 발생한 경우 이는 하강이 부적절하게 계획되었음을 나타낸다. 순항 고도로부터의 IFR descent를 계획함으로써 계기 접근이 시작되기 전에 항공기가 approach gate altitude나 initial approach fix altitude에 도달할 수 있도록 만든다. 예를 들어 3,000ft에서의 crossing restriction을 만족하기 위하여 11,000ft에서 하강해야 한다. [그림 3-8] 목적지 공항 접근 도중 200knots의 속도 제한이 있으므로 조종사는 190knots의 하강 속도와 1,000fpm의 하강률을 선택하였다. 10knot의 정풍이 있다 가정할 경우 groundspeed는 180knots이다.
Descending From the En Route Altitude
순항 구간으로부터 계기 접근 절차로 전환하기 위해선 특정 waypoint에 특정 고도로 도달해야 하는 경우가 있다. 이러한 조건이 arrival procedure에 게재되어 있는 경우, 혹은 ATC에 의해 발부된 경우 이를 crossing restriction이라 부른다. 설령 ATC가 descent at the pilot’s discretion을 인가하였다 하더라도 조종사는 접근을 시작하기에 편리한 waypoint 및 altitude를 선택해야 한다. 어떠한 경우이든 순항 고도로부터 특정 waypoint나 altitude로 하강하기 위해선 계획이 필요하다.
ATC는 조종사에게 특정 고도로 하강하라 요청할 수 있다. 일반적으로 이러한 clearance는 en route 항적 분리가 목적이므로 조종사는 이에 신속하게 대응해야 한다. 할당받은 고도로부터 1,000ft 상공까지는 최적의 하강률로 하강한다. 그런 다음 할당받은 고도까지는 500 ~ 1,500fpm의 하강률로 하강한다. 조종사는 어떠한 경우이든 최소 500fpm으로 하강할 수 없다면 ATC에 알려야 한다(단, 10,000ft MSL에서 250KIAS로 감속할 때 제외).
두 번째 유형의 clearance는 “descend at pilot’s discretion”이다. ATC가 이러한 clearance를 발부한 경우 조종사는 원하는 때에 원하는 속도로 하강할 수 있다. 또한 조종사는 하강 도중 중간 고도에서 잠시 level off를 수행할 수 있다. 허나 한번 고도를 벗어났다면 해당 고도로 되돌아갈 수 없다.
또한 descent clearance에 “pilot’s discretion” 구간이 포함될 수도 있다(예를 들어 “cross the Joliet VOR at or above 12,000, descend and maintain 5,000”). 이러한 clearance에서 조종사는 Joliet VOR을 12,000ft MSL 이상으로 통과하기만 한다면 언제든 현재 고도에서 하강할 수 있다. 그런 다음에는 5,000ft MSL에 도달할 때까지 정상 하강률로 하강해야 한다.
pilot’s discretion clearance는 ATC만의 선택지가 아니다. 보다 효율적인 운항을 위하여 조종사 또한 이러한 clearance를 요청할 수 있다. 예를 들어 조종사가 overcast layer 상공을 비행 중인 경우 항공기가 최대한 오랫동안 구름 위에 머물 수 있도록 pilot’s discretion을 요청할 수 있다. 이는 현재 착빙이 발생하기 유리한 상황이며 항공기가 착빙 방지 기능을 갖추지 아니한 경우 특히나 중요할 수 있다. 조종사는 순항 고도를 더 오래 유지함으로써 연료를 절약하거나, 혹은 착빙 조건에서의 장시간 비행을 피할 수 있다. 또한 이러한 유형의 하강은 조종사로 하여금 잔잔한 공기에서 수평을 유지할 수 있도록 허용하여 난기류에서 보내는 시간을 최소화해준다.
Controlled Flight Into Terrain(CFIT)
arrivals 도중 부적절한 하강 계획 및 수행으로 인하여 많은 사고가 발생하였다. commercial jet operations가 시작된 이래 9,000명 이상의 사람들이 CFIT(controlled flight into terrain)로 인해 사망하였다. CFIT는 정상적으로 작동하는 항공기가 부주의로 인해 지상, 물, 혹은 장애물에 충돌하는 사고를 말한다.
CFIT 사고의 근본적 원인은 조종사의 상황인식 부족과 관련되어 있다. 상황인식의 한 가지 정의는 항공기와 조종사의 안전한 운항에 영향을 미치는 요인 및 조건을 정확하게 인지하는 것이다. CFIT의 원인은 지상, 물, 혹은 장애물에 대한 수직 위치/수평 위치 인지 부족이다. 모든 CFIT 사고의 2/3 이상이 고도 오류, 혹은 수직 위치 인지 부족으로 인하여 발생한다. CFIT 사고는 보통 저시정 조건이 IMC(instrument meteorological conditions)나 어둠과 복합적으로 작용할 때 자주 발생한다.
관제사와 조종사가 제대로 의사소통을 하지 못하는 것은 CFIT 사고의 원인이다. 과중한 업무량으로 인하여 급하게 교신을 할 수 있으며 이때 축약된, 혹은 비표준 어법이 사용될 수 있다. 원활한 교신의 중요성은 ATC와 MD-80 조종사의 보고서를 통해 명확히 드러났다.
레이더로 항적 상황을 살피던 도중 관제사는 MD-80이 6,400ft를 통과하여 하강하고 있음을 발견하였다. 관제사는 즉시 최소 6,500ft로 상승하라 지시하였다. 관제사의 경고 덕분에 조종사는 지형을 회피하였다. 무선 교신 기록에 따르면 항공기는 7,000ft로 승인되었다. 허나 조종사는 5,000ft라 read back을 하였고 5,000ft로 하강하였다. 조종사가 5,000ft를 read back 하였을 때 관제사로부터의 수정은 없었다. 보고서에서 조종사는 이렇게 말하였다: “산과의 거리가 얼마나 떨어져 있었는지는 모르겠다. 허나 관제사와 조종사 사이의 원활한 교신이 얼마나 중요한지는 확실히 알 수 있었다.”
ATC가 항상 항공기의 안전한 지형 회피를 책임지지는 않는다. ATC는 조종사로 하여금 항로를 벗어나 특정 지점으로 직접 향할 수 있도록 en route clearances를 발부하는 경우가 많다. 이러한 유형의 clearance를 수락하는 조종사는 안전한 지형 회피에 대한 책임 공유도 받아들이는 것이다. 조종사는 운항 지역상 가장 높은 지형 및 장애물의 높이를, 그리고 높은 지형에 대한 자신의 위치를 파악해야 한다. [그림 3-9]
조종사와 관제사 사이의 훌륭한 의사소통만이 중요한 것은 아니다. 1974년에 발생한 사고결과 NTSB(National Transportation Safety Board)는 다음과 같이 말하였다: “하강 도중 조종사들이 나눈 불필요한 대화가 조종실 내 해이한 분위기를 나타냈으며 이는 접근 내내 계속되었다.” NTSB는 그 원인을 다음과 같이 말하였다: “조종사들이 규정된 절차를 따르지 않는 등 조종실 규율을 제대로 지키지 않아 접근 도중 critical points에서 고도를 인지하지 못하였다.”
1981년 FAA는 14 CFR Part 121.542/135.100(Flight Crewmember Duties)을 발행하였다. 이는 흔히 “sterile flight deck rules”라 불린다. 이 조항들은 조종사가 arrivals 도중 경로와 고도를 이탈하지 않도록 방지하는데 도움을 제공할 수 있다. 규정은 다음을 명시한다: (a) 모든 조종사들은 critical phase of flight 도중 항공기의 안전한 운항을 위해 필요한 임무를 제외하고는 어떤 임무도 요구하거나 수행할 수 없다. 불필요한 회사 교신, 불필요한 기내 방송, 그리고 불필요한 서류 작업은 항공기의 안전한 운항을 위해 필요하지 않다. (b) 모든 조종사들은 critical phase of flight 도중 조종사의 업무 수행에 방해될 수 있는 모든 활동들에 관여하거나 허가할 수 없다. 식사, 불필요한 대화, 그리고 비행과 관련 없는 간행물 읽기와 같은 활동들은 항공기의 안전한 운항을 위해 필요하지 않다. (c) critical phase of flight(비행 중요 단계)는 모든 ground operations(taxi, takeoff, 그리고 landing 포함)를, 그리고 10,000ft 미만에서 수행되는 기타 모든 flight operations(단, 순항 비행 제외)를 포함한다.
'Instrument Procedures Handbook(2017) > 3: Arrivals' 카테고리의 다른 글
| (1) Introduction (0) | 2024.02.07 |
|---|---|
| (3) Standard Terminal Arrival Routes(STARs) (0) | 2024.02.07 |
| (4) Preparing for the Arrival (0) | 2024.02.07 |
| (5) Special Airport Qualification (0) | 2024.02.07 |