현재 FAA는 VOR, NDB, 그리고 그 외 ground-based NAVAIDs의 항법 의존도를 줄이는 대신 위성 기반 항법의 사용을 늘리는 것을 목표로 하고 있다.
원래 VOR, NDB, 그리고 그 외 ground-based NAVAID를 퇴역시키는 것이 FAA의 계획이었다. 허나 충분한 백업 시스템을 유지하면서 augmented satellite navigation에 대한 의존도를 높이기로 전략을 변경하였다. 이러한 백업 시스템에는 모든 CAT II/III ILS facilities를 유지하되 기존 VOR network의 절반을 유지하는 것이 포함된다.
각 접근은 주변 지형, 장애물, 그리고 NAVAID 유효성을 기초로 FAA Order 8260.3 TERPS 설계 기준에 따라 장애물 회피를 제공한다. final approach obstacle clearance는 모든 접근 유형마다 다르다. 허나 이는 final approach segment의 시작 지점부터 활주로(비정밀 접근의 경우에는 MDA)나 MAP 중 final approach area 내에서 마지막으로 존재하는 지점까지 장애물 회피를 보장한다. final approach area의 경계 내에서 적절한 비행경로를 유지하고 장애물 회피를 유지하는 것은 조종사에게 달려있다.
NAS 내에서 사용할 수 있는 계기 접근의 종류는 매우 다양하다. 여기에는 RNAV(GPS), ILS, MLS, LOC, VOR, NDB, SDF, 그리고 radar approaches를 포함한다. 각 접근은 각각의 설계 기준, 장비 조건, 그리고 시스템 성능을 가진다.
Visual and Contact Approaches
비행 상황이 적절한 경우 ATC는 항적을 더 신속히 처리하기 위해 접근 절차 대신 visual approach를 허가할 수 있다. contact approach를 요청할 경우 IAP보다 시간이 덜 걸리며 IFR 및 SVFR(special visual flight rules) 항적과의 분리가 제공되므로 유리할 수 있다. SIAP를 수행하는 대신 visual approach나 contact approach를 사용할 수 있으며 이들은 입항 효율성을 증가시킴과 동시에 IFR로 계속 비행할 수 있도록 허용한다.
Visual Approaches
운영상 유익한 경우 ATC는 조종사로 하여금 IAP 대신 visual approach를 수행하도록 허가할 수 있다. 조종사나 관제사가 visual approach를 개시할 수 있다. visual approach clearance를 발부하기 전에 ATC는 조종사가 공항을, 혹은 뒤따를 선행 항공기를 시야에 두고 있는지 확인해야 한다. 조종사가 공항이나 항공기를 확인하였다 보고할 경우 다른 항적과의 분리와 안전 고도를 유지하는 것은 조종사의 책임이다. 만약 조종사로부터 공항은 확인하였으나 뒤따르도록 배정받은 항공기는 확인되지 않는다 보고받을 경우 ATC는 여전히 visual approach clearance를 발부할 수 있다. 허나 항공기 분리(wake turbulence 분리 포함)에 대한 책임은 관제사가 갖는다. 다른 항적이 시야에 들어왔다고 보고할 경우 분리와 wake turbulence 회피에 대한 책임은 조종사가 갖는다.
visual approach는 IFR 비행 계획서의 항공기가 착륙 공항을 향해 시계(visual)로 진행하기 위한 ATC 인가이다. 즉, 이는 IAP가 아니다. 또한 여기에는 missed approach segment가 없다. visual approach를 완료할 수 없는 항공기는 go-around로 처리되어야 하며 적절한 분리가 제공되어야 한다. 만약 착륙 공항에 대해 보고된 ceiling이 MVA/MIA로부터 최소 500ft 이상이고 시정이 3SM 이상이라면 visual approach를 위한 vector가 ATC로부터 시작될 수 있다. weather reporting service가 없는 공항의 경우에는 area weather reports와 PIREPs를 통해 공항으로의 강하 및 접근이 시계로 이루어질 수 있다는 합리적 확신이 있어야 한다. 이 경우 기상 정보를 이용할 수 없음을 조종사에게 알려야 한다.
visual approach clearance는 공항으로 향하는 항적 흐름을 신속히 처리하기 위해 발부된다. 이는 ceiling이 최소 1000ft AGL이고 시정이 최소 3SM이라 보고되거나 예상되는 경우에 승인된다. visual approach 수행 도중 조종사는 항상 구름으로부터 벗어나있어야 한다. 관제탑이 있는 공항의 경우 다른 항적이 다른 활주로(parallel, intersecting, 혹은 converging runway)를 향해 VFR/IFR approach를 수행하는 도중에도 조종사에게 visual approach를 승인할 수 있다. 만약 레이더 서비스가 제공되고 있다면 관제탑이나 advisory frequency로 변경하라는 지시를 받을 때 레이더 서비스가 자동으로 종료된다. visual approach 수행 도중 조종사는 안전한 장애물 회피를 수행할 책임을 가진다.
Contact Approaches
상황이 적절한 경우 조종사는 contact approach를 요청할 수 있다. contact approach는 ATC로부터 개시될 수 없다. 조종사는 신속한 입항을 위해 차트의 절차 대신 contact approach를 사용할 수 있다(단, 공항에 SIAP가 있고, 보고된 지상 시정이 최소 1SM이며, 접근 도중 최소 1SM의 비행시정으로 구름을 회피할 수 있는 경우). 이는 차트의 접근 절차보다 더 적은 시간을 요구하고, 조종사가 IFR clearance를 유지하도록 허용하며, IFR 및 SVFR 항적과의 분리가 제공된다는 장점을 가지고 있다. 허나 장애물 회피, 그리고 VFR 항적 회피는 조종사의 책임이다. 조종사는 구름 회피, 혹은 지형/장애물 회피를 위해 공항을 향하여 상승∙하강∙우회경로를 비행해야 할 수 있다(단, 달리 제한되는 경우 제외).
다음은 visual approach와 contact approach의 주요 차이점이다: contact approach는 조종사가 개시하는 반면 visual approach는 ATC나 조종사로부터 개시될 수 있음, contact approach의 경우 구름으로부터 벗어난 상태를 유지할 수 있다면 1마일의 시정에서도 승인될 수 있는 반면 visual approach의 경우 공항이나 선행 항공기를 확인해야함과 동시에 최소 1,000ft AGL의 ceiling과 최소 3SM의 visibility가 요구됨.
Charted Visual Flight Procedures
환경적 고려 사항, 소음 고려 사항, 그리고 교통의 안전성 및 효율성을 위하여 일부 공항에 CVFP(charted visual flight procedure)가 설정될 수 있다. CVFP는 주로 터보제트 항공기용으로 설계되었다. 여기에는 저명한 랜드마크, 경로, 그리고 특정 활주로에 대한 권장 고도가 표시된다. Roaring Fork Visual RWY 15를 비행하는 경우 VOR, NDB, 그리고 DME fixes 대신에 산, 강, 그리고 마을이 Aspen, Colorado’s Sardy Field로 향하는 안내를 제공한다[그림 4-35].
ATC가 CVFP clearance를 발부하기 전에 조종사는 반드시 차트의 랜드마크나 선행 항공기를 확인해야 하며 기상이 차트의 minimums 이상이어야 한다. 만약 착륙 공항에 대해 보고된 ceiling이 MVA/MIA로부터 최소 500ft 이상이고 시정이 3SM 이상이라면 ATC는 CVFP를 인가할 것이다(단, CVFP에 대해 더 높은 minimums가 게재된 경우 제외). 선행 항공기를 뒤따르도록 승인받은 경우 안전 고도, 접근 간격, 그리고 wake turbulence 분리에 대한 책임은 조종사에게 있다. charted visual approach의 어느 지점에서 더 이상의 진행이 불가능해진 경우, 혹은 선행 항공기를 시야에서 놓친 경우 조종사는 이를 ATC에 알려야한다.
RNAV Approaches
naming conventions의 변화로 인해 RNAV 장비를 사용하는 모든 접근들이 RNAV라는 하나의 분류로 통합되었다. 이러한 분류에는 ground-based system과 satellite dependent system이 모두 포함된다. 결국 특정 유형의 RNAV를 사용하는 모든 접근들이 차트의 명칭에 RNAV를 반영한다.
이는 계기 접근 기술의 두 가지 변화를 반영하기 위해 이루어지고 있다. 첫 번째 변화는 RNP이다(Chapter 1, Departure Procedures 참조). 이로 인해 departure/approach procedure design에 대해 하나의 성능 표준 개념이 구현되고 있다. 항공기가 적절한 RNP 표준을 유지할 수 있는 경우 기본적인 항법 시스템이 필요하지 않을 수 있다. 두 번째 변화는 대부분의 항공사에서 사용되는 첨단 항전 시스템(예를 들어 FMS)이다. 이는 RNAV가 계기 접근 시스템에 완전히 통합될 수 있는 새로운 항법 표준을 필요로 한다.
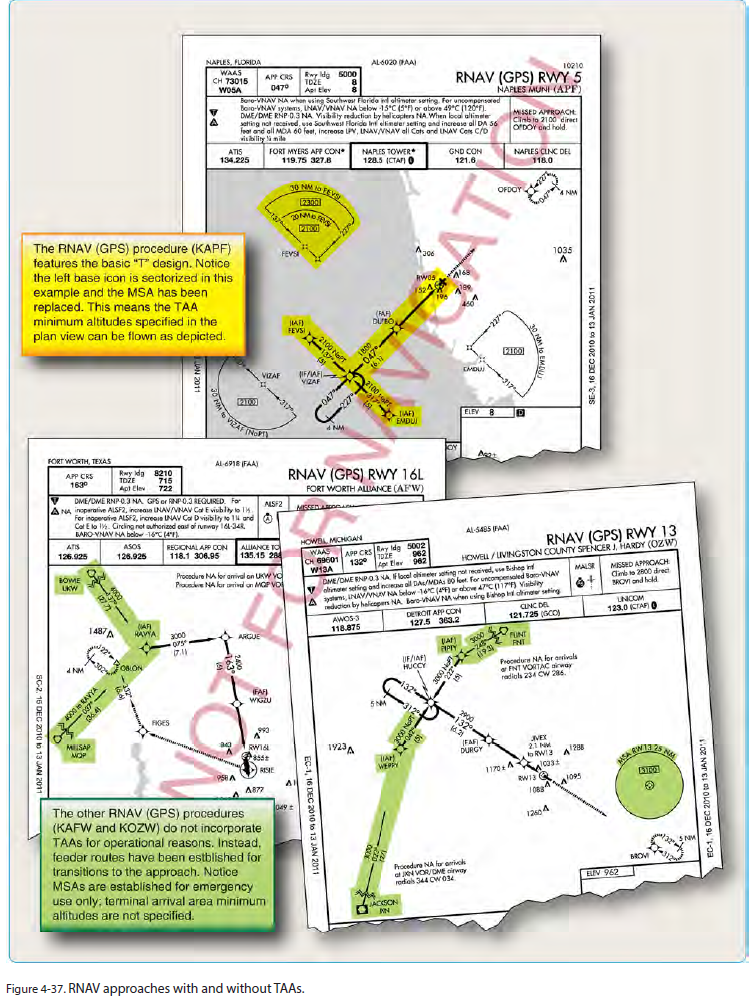
FMS는 위치 계산을 위해 여러 센서들의 항법 입력을 사용한다. 기본적으로 FMS navigation은 항공기 위치 계산을 위해 자동으로 position sensors를 선택한다. 계기 접근 차트와 RNAV 데이터베이스는 이러한 사안들을 반영하기 위해 변화해야 했다. airborne navigation databases에 관한 완전한 설명은 Chapter 6, Airborne Navigation Databases에 포함되어 있다. RNAV의 다면적인 특성으로 인하여 새로운 접근 기준이 개발되었다. 여기에는 TAA(terminal arrival areas), RNAV 기본 접근 기준, 그리고 다양한 유형의 RNAV approaches에 대한 특정 final approach 기준이 포함된다.
Terminal Arrival Areas
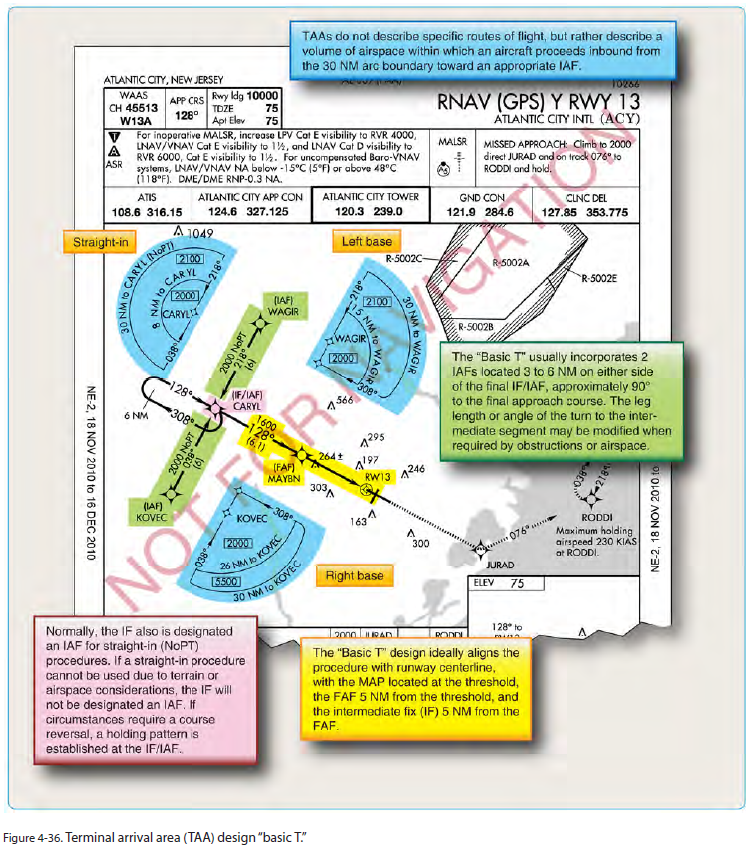
TAA는 RNAV(Area Navigation) 시스템을 갖춘 항공기로 하여금 en route structure에서 terminal environment로 전환할 수 있도록 해준다. TAA boundaries 내를 운영할 경우 TAA는 standard obstacle clearance를 갖춘 minimum altitudes를 제공한다. TAA는 주로 RNAV approaches에서 사용된다(단, 항적이 많은 지역에서는 보통 TAA가 사용되지 않는다). 허나 IF로 진행하기 위한 유일한 수단이 RNAV인 경우 ILS approach에서도 TAA가 사용될 수도 있다. [그림 4-36]
TAA의 기초가 되는 RNAV procedure의 기본 설계는 보통 “T” design(“Basic T”라고도 불림)이다. “T” design은 두 개의 IAF와 dual purpose IF/IAF(intermediate fix와 initial approach fix로 기능)를 포함한다. T design은 IF/IAF에서 FAF로, 그리고 FAF에서 MAP로 이어진다. 두 개의 base leg IAFs는 보통 일직선으로 연결되며 이 직선은 IF/IAF에서 intermediate course와 수직으로 교차한다. HILO(Hold-in-Lieu-of Procedure Turn)가 IF/IAF에 위치하며 “hold-in-lieu-of-PT” holding pattern symbol이 사용된다. 경로 정렬 및/혹은 하강을 위해 HILO가 필요한 경우 dual purpose IF/IAF가 entry를 위한 IAF로 사용된다. HILO pattern 진입 후 “NoPT”가 표시된 경로나 영역을 비행하는 경우 dual-purpose fix가 IF로 사용되며 Intermediate Segment의 시작 지점을 나타낸다.
“T” design을 기초로 하는 standard TAA는 IAF legs와 intermediate segment course에 의해 세 가지 섹터로 규정된다. 이러한 섹터들은 straight-in area, left-base area, 그리고 right-base area로 불린다. [그림 4-36] TAA area의 측면 경계는 IF/IAF로 향하는 TO magnetic courses에 의해 식별된다. straight-in area는 파이 모양의 섹터로 나뉠 수 있으며 그 경계선은 IF/IAF로 향하는 TO magnetic courses에 의해 식별된다. 또한 straight-in area는 step-down sections를 포함할 수도 있으며 이는 IF/IAF로부터의 RNAV 거리를 기초로 하는 호(arc)에 의해 식별된다.
일반적으로 no procedure turn(NoPT) routing을 통해, 혹은 course reversal maneuver를 통해 terminal area에서 procedure로 진입하게 된다. 특정 TAA sector 내를 비행할 시 course reversal이 허가되지 않음을 나타내기 위해 “NoPT”가 명시된다[그림 4-36과 4-37]. 그렇지 않은 경우 조종사는 14 CFR 91.175에 따라 course reversal을 수행해야 한다. 절차가 course reversal pattern을 요구하지 않아도 조종사는 이를 사용하기로 결정할 수 있다(단, 절차를 수행하기 전에 ATC로부터 clearance를 반드시 받아야 함).
ATC는 left base leg IAF나 right base leg IAF에 90도를 초과하는 intercept angle을 승인해서는 안 된다. sector나 procedure segment에 “NoPT”가 표시된 경우 조종사는 HILO course reversal을 수행해서는 안 된다.
만약 IF/IAF로 향하는 경로가 “NoPT”로 표시된 straight-in sector 내에 있으며 intercept angle이 90도를 초과하지 않는 경우 ATC는 항공기가 IF/IAF fix로 직접 향하도록 승인할 것이다. 조종사는 IF/IAF를 직접 향하여 진행한 후 straight-in approach를 수행해야 한다. HILO course reversal을 수행해서는 안 된다. 또한 ATC가 IF/IAF로 향하는 radar vectors와 monitoring을 제공하면서 “straight-in” approach clearance를 발부하였다면 조종사는 straight-in approach를 수행해야 한다. 그렇지 않은 경우 조종사는 HILO course reversal을 수행해야 한다. (AIM Paragraph 5-4-6, Approach Clearance 참조)
종종 ATC는 접근 절차의 명칭을 명시하지 않거나, 혹은 특정 IAF를 명시하지 않고 접근을 인가할 수 있다. 어느 경우이든 조종사는 현 위치로부터 approach course에 진입할 섹터와 관련된 IAF, 혹은 IF/IAF로 직접 향해야 한다. 해당 섹터에서 요구하는 경우(즉, 해당 섹터에 “NoPT”가 표시되지 않은 경우) HILO course reversal을 완료해야 한다.
Note: sector boundary의 TO bearing을 따라 접근하는 경우 조종사는 “NoPT” routing을 따라 진행해야 한다(단, ATC로부터 달리 지시받은 경우 제외).
TAA 내에 게재된 고도들은 MSA altitude를 대신한다. 허나 TAA altitude는 MSA altitude와는 달리 운영상 이용이 가능하다. 이 고도들은 최소 1,000ft의 장애물 회피를 제공한다(산악 지역에서는 더 많이 제공됨). 조종사는 최소 고도 조건을 준수하기 위해 항공기가 진입하는 TAA sector를 알고 있어야 한다. 조종사는 IF/IAF fix로 향하는 TO magnetic bearing을 확인함으로서 항공기가 어떤 TAA 섹터에 진입하는지를 결정할 수 있다. 해당 bearing을 TAA의 lateral boundary bearing과 비교한다. 위치 결정을 위해 right-base IAF나 left-base IAF로 향하는 bearing을 사용하지 않는다.
approach clearance 없이 IAF나 IF/IAF로 직접 향하라는 ATC clearance는 하강을 승인하지 아니다. 만약 더 낮은 TAA 고도를 원한다면 조종사는 이를 ATC에 요청해야 한다. clearance를 잘 모르겠는 경우 조종사는 ATC에 confirm을 요청하거나, 혹은 구체적인 clearance를 요청해야 한다. two-way communications failure(14 CFR 91.185, IFR Operations: Two-way Radio Communications Filure)상태로 TAA에 진입하는 경우 적절한 IAF에 도달하기 전까지는 14 CFR 91.185(c)(2)에서 규정된 가장 높은 고도를 유지해야 한다.
접근을 승인받은 경우 조종사는 TAA 내에서 특정 섹터의 minimum altitude로 하강할 수 있다(단, ATC로부터 달리 지시받은 경우 제외). 조종사는 IF/IAF에서 FAF로 정상 하강을 수행할 수 있도록 TAA 내 강하를 계획해야 한다.
미국 정부 차트는 plan view에 표시된 실제 접근 절차의 바깥 부분에 아이콘들을 배치하여 TAA를 표시한다. 이러한 아이콘들은 “T” procedure(altitudes, courses, minimum altitudes, 등등)가 가려지는 것을 방지하기 위함이다. 각 TAA area에 대한 아이콘이 접근 절차의 입항 방향과 관련하여 배치된다. 아이콘은 TAA minimum altitudes와 sector/radius subdivisions를 나타낸다. 아이콘과 접근 절차를 맞추는 것을 돕고자 TAA area에 대한 IAF가 아이콘에 포함된다. IAF의 명칭, 그리고 IAF로부터 TAA area boundary까지의 거리가 아이콘의 바깥쪽 호에 표시된다.
운영상 조건이나 ATC 조건을 수용하기 위해 TAA의 크기와 모양이 수정될 수 있다. 일부 섹터들은 제거되고 그 외 섹터들은 확장될 수 있다. 지형이나 ATC 고려사항으로 인하여 “T” design이 수정될 수 있다. 예를 들어 “T” design은 규칙적이거나 불규칙적인 “Y” 모양, 거꾸로 된 “L” 모양, 혹은 “I” 모양처럼 보일 수 있다.
항로가 TAA의 측면 경계를 지나지 않는 경우에는 airway fix나 NAVAID로부터 TAA 경계까지 feeder route가 설정된다. 이는 en route structure에서 IAF로의 transition을 제공하기 위함이다. 각 feeder route는 TAA 경계에서 종료되며 IAF로 향하는 경로를 따라 연장된다. TAA 경계를 통과한 후 ATC로부터 접근을 승인받았다면 TAA altitude로 하강해야 한다.
“T”의 각 waypoint에는 발음이 가능한 다섯 글자의 명칭이 할당된다(단, missed approach waypoint 제외). 이러한 명칭은 ATC 교신, RNAV 데이터베이스, 그리고 aeronautical navigation products에서 사용된다. missed approach waypoint가 runway threshold에 위치하지 않는 경우에는 발음이 가능한 명칭이 할당된다.
RNAV는 다양한 기본 항법 시스템들을, 그리고 그에 따른 접근 기준들을 망라한다. 따라서 RNAV approaches의 final approach segment에 대한 기준들은 서로 다르게 설정된다. RNAV 계기 접근 기준은 다음 절차들을 다룬다:
• GPS overlay of pre-existing nonprecision approaches.
• VOR/DME based RNAV approaches.
• Stand-alone RNAV (GPS) approaches.
• RNAV (GPS) approaches with vertical guidance (APV).
• RNAV (GPS) precision approaches (WAAS and LAAS).
GPS Overlay of Nonprecision Approach
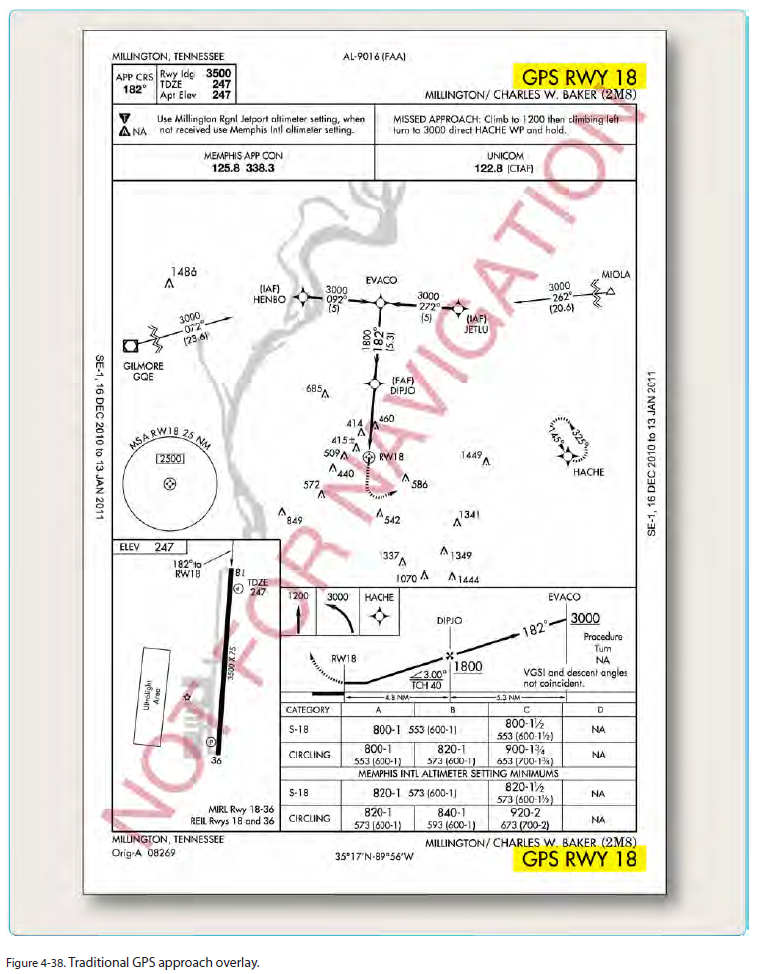
원래 GPS approach procedures는 conventional, ground-based NAVAIDs를 기반으로 하는 비정밀 접근을 비행하도록 승인되었다. 이러한 접근의 대부분이 stand-alone approaches로 전환되었으며 남아 있는 몇몇 접근들이 “or GPS”를 통해 식별된다. 이러한 GPS nonprecision approaches는 접근의 기초가 되는 ground-based NAVAID의 설계 기준을 따른다. 따라서 해당 접근은 stand-alone GPS approaches에 대한 RNAV 설계 기준을 준수하지 않으며 설계 기준을 결정하는데 있어 RNAV(GPS) approach의 일부로 간주되지 않는다. [그림 4-38]
GPS Stand-Alone/RNAV(GPS) Approach
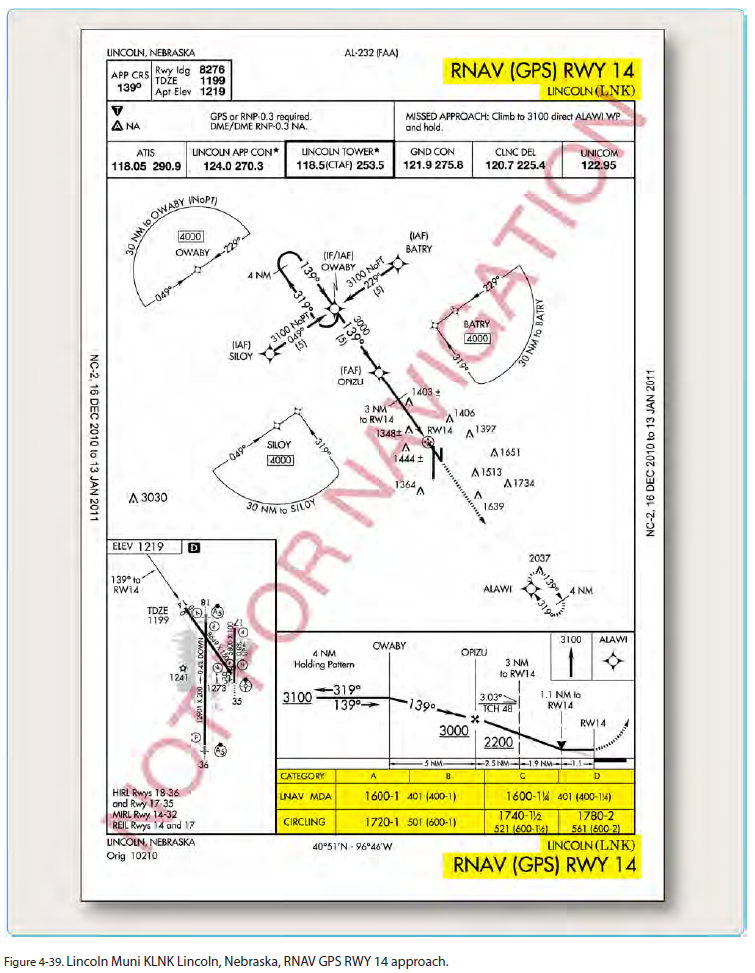
GPS stand-alone approaches가 RNAV approaches로 대체됨에 따라 그 수가 계속 감소하고 있다. RNAV(GPS) approaches는 항법 데이터베이스가 GPS나 RNAV를 접근 명칭으로 사용할 수 있도록 명명되었다. 이는 non-GPS approach systems(예를 들어 VOR/DME를 기반으로 하는 RNAV 시스템)에서 필요하다. 과거에는 이러한 접근을 종종 “stand-alone GPS” approaches라 불렀다. 해당 접근은 비정밀 접근으로 간주되며 LNAV minimum과 circling minimum을 제공한다. 비록 precision minimums가 인가되지는 않지만 LNAV/VNAV minimums가 게재될 수도 있다. Lincoln, Nebraska의 RNAV (GPS) Runway 14 approach는 LNAV minimum과 circling minimum만을 가지고 있다. [그림 4-39]
non-vertically guided straight-in RNAV(GPS) approach의 경우 final approach course는 활주로 연장선으로부터 15도 이내로 정렬되어야 한다. final approach segment는 10NM을 초과해서는 안 되며 6NM을 초과하는 경우에는 보통 stepdown fix가 포함된다. straight-in approaches의 경우 final approach segment에서 최소 250ft의 장애물 간격이 제공되며 최대 400ft/NM의 descent gradient가 허용된다. Baro-VNAV system의 vertical guidance를 사용하는 접근의 경우 접근 설계 기준이 다르다. Baro-VNAV guidance는 primary가 아닌 advisory이다. 따라서 위험한 지형의 경우, 혹은 remote altimeter setting이 필요한 경우에는 Baro-VNAV approaches가 승인되지 않는다. 기압계 수치 및 저온과 관련된 문제로 인하여 해당 접근은 온도 제한도 가지고 있다. RNAV Approach Construction Criteria에 대한 추가적인 접근 설계 기준은 FAA Order 8260-series orders에서 확인할 수 있다.
RNAV(GPS) Approach Using WAAS
WAAS가 지원할 수 있는 minima의 유형들은 다음과 같다: LPV, LNAV/VNAV, LP, 그리고 LNAV. 비록 LPV는 정밀 접근으로 간주되지 않지만 최소 200ft HAT 및 1/2SM visibility까지 접근을 가능하게 해준다.
NOTE: WAAS avionics는 Technical Standard Order (TSO) C145, Airborne Navigation Sensors Using the Global Positioning System (GPS) Augmented by the Satellite Based Augmentation System (SBAS), 혹은 TSO-146, Stand-Alone Airborne Navigation Equipment Using the Global Positioning System (GPS) Augmented by the Satellite Based Augmentation System (SBAS)에 따라 감항 승인을 받으며 AC 20-138C, Airworthiness Approval of Positioning and Navigation Systems에 따라 설치된다.
더 많은 GBAS approach 유형들이 운영됨에 따라 정밀 접근 성능을 사용할 수 있게 될 것이다. GBAS는 GPS의 정확도를 더욱 높이며 무결성 경고를 향상시킨다. 정밀 접근 성능을 위해선 obstruction planes와 approach lighting systems가 ILS 접근에 대한 Part 77 기준을 만족해야 한다. 이는 RNAV(GPS)의 정밀 접근 성능 구현을 지연시킨다. 왜냐하면 각 활주로를 증명하는데 비용이 발생하기 때문이다.
ILS Approaches
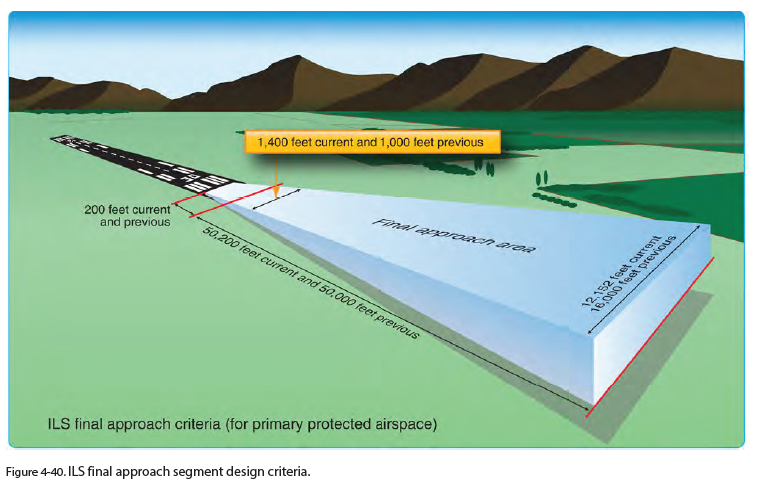
새로운 RNAV 기술에도 불구하고 ILS는 현재 가장 정밀하고 정확한 접근 방식이다. ILS CAT I 정밀 접근을 통해 TDZE으로부터 200ft, 그리고 1,800 RVR까지 접근이 가능하다. CAT II/III 접근을 사용하는 경우에는 더 낮은 고도 및 시정까지 접근이 가능하다. 비정밀 접근은 ILS의 정밀도나 유연성을 제공하지 못한다. 바쁜 공항의 수용력을 더욱 늘리고 ILS 기술의 잠재력을 최대한 활용하기 위하여 다양한 방법들이 사용되고 있다.
ILS 시스템은 하나의 활주로에서 시간당 최대 29대의 입항을 수용할 수 있다. two/three parallel runways를 독립적으로 운영하는 경우에는 공항 수용력을 두 배나 세 배로 늘릴 수 있다. 이는 승객 및 화물 서비스의 일정 계획에 대한 유연성을 향상시켜준다. 공항 수용력은 simultaneous ILS approach나 converging ILS approach를 통해서도 증가한다.
simultaneous ILS approach나 converging ILS approach를 성공적으로 수행하기 위해선 조종사와 ATC에게 추가적인 책임이 할당된다. simultaneous instrument approaches가 사용 중인 경우 ATC는 조종사에게 active runways를 알려줘야 한다. simultaneous approach를 수행할 수 없거나 수행할 의향이 없다면 조종사는 이를 ATC에 알려야 한다. 조종사는 모든 ATC 요청을 적시에 준수해야 하며 엄격한 교신 규칙을 유지해야 한다(예를 들어 완전한 항공기 호출 부호를 사용해야 함). 또한 조종사는 교신 시스템이나 항법 시스템과 관련된 모든 문제를 즉시 ATC에 알려야 한다. 접근 브리핑에는 최소한 접근 명칭, 활주로 번호, 주파수, final approach course, glideslope intercept altitude, DA/DH, 그리고 missed approach instructions가 포함되어야 한다. 또한 coupled ILS approaches를 수행하는 경우에는 autopilot procedures에 대한 검토도 필요하다.
항법에 대한 주요 책임은 PIC에게 달려있다. ATC instructions는 항공기 분리를 보장하는 것으로 제한된다. 또한 missed approach procedures는 연관 항공기들의 보호를 위하여 서로 갈라지도록 설계되어 있다. 모든 유형의 ILS 접근들은 동일한 장애물 회피 거리와 설계 기준을 적용받는다. [그림 4-40]
ILS Approach Categories
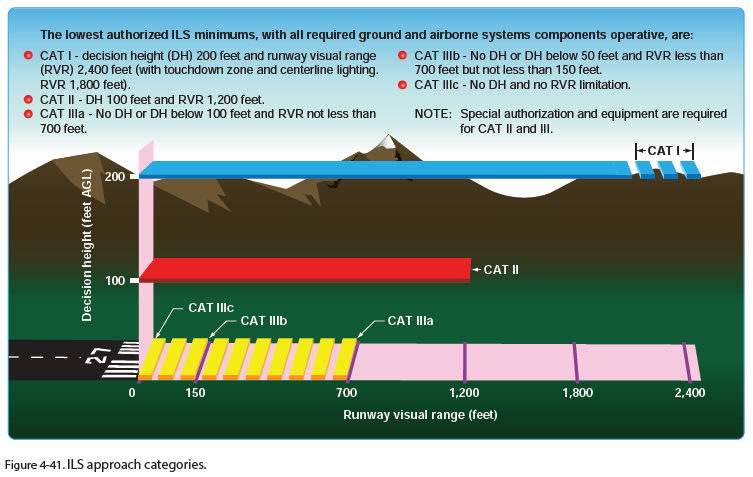
ILS approaches에는 세 가지 유형이 있다: CAT I, CAT II, 그리고 CAT III(autoland). 기본적인 ILS 접근은 CAT I 접근이다. 이는 조종사의 계기 한정 자격과 적절한 항공기 장비만을 필요로 한다. CAT II/III 접근들은 더 낮은 minimums를 가지며 운영자, 조종사, 항공기, 그리고 공중/지상 장비에 대한 특별 증명을 필요로 한다. 장비의 복잡성과 높은 비용으로 인하여 CAT III 접근은 주로 항공사나 군 작전에서 사용된다. [그림 4-41]
CAT II and III Approaches
CAT II/III 접근을 수행하기 위해 허용되는 인가 및 minimum RVRs는 OpSpecs Part C에서 확인할 수 있다. CAT II/III operations는 특정 조종사로 하여금 매우 제한적인 기상 조건에서 계기 접근을 수행할 수 있도록 허용한다.
CAT I ILS operations의 경우 TDZ RVR을 midfield RVR로 대체할 수 있다(TDZ RVR을 사용할 수 없을 때). 허나 CAT II ILS operations는 TDZ RVR을 대체하는 것을 허용하지 않는다. TDZ RVR 시스템은 필수적이며 반드시 사용되어야 한다. TDZ RVR은 모든 CAT II ILS operations를 규제한다.
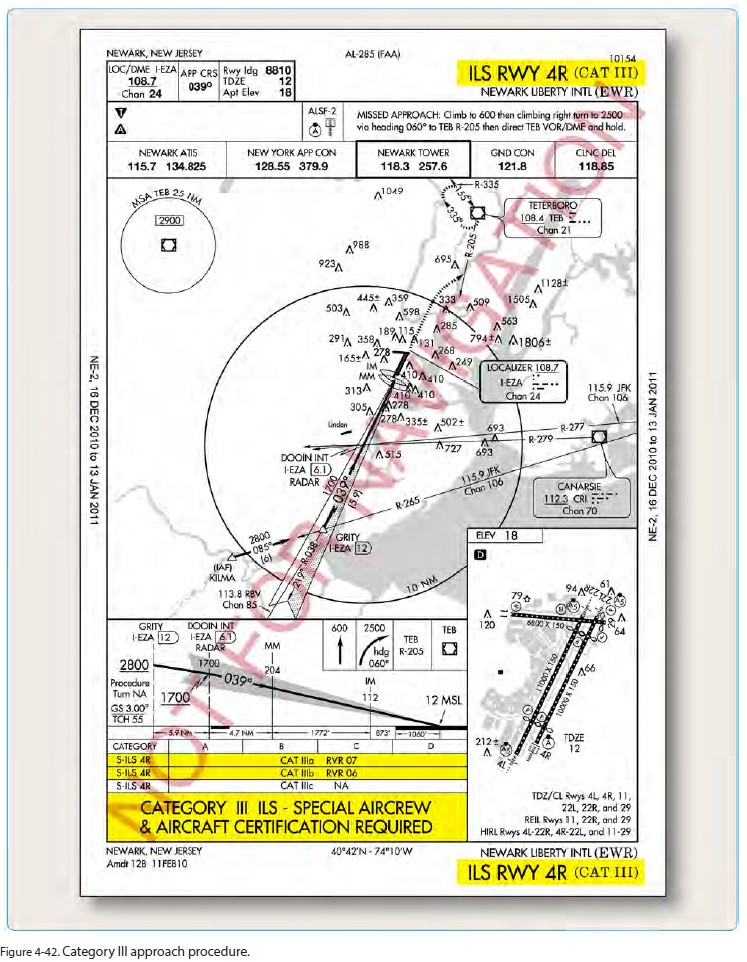
CAT III operations 도중 마주하는 기상 조건은 manual rollout을 위한 시각 참조물이 충분한 지역(CAT IIIa)부터 taxi operations를 위한 시각 참조물이 불충분한 지역(CAT IIIc)까지 다양하다. auto-flight systems에 따라 일부 항공기는 TDZ 착륙을 위하여 DH를 필요로 하고 일부 항공기는 auto-flight systems의 성능 확인을 위하여 Alert Height를 필요로 한다. 이러한 고도들은 RA(radio altitude)를 기초로 하며 항공기의 AFM에서 확인할 수 있다. [그림 4-42]
CATII/III는 모두 특별한 지상 및 공중 장비를, 그리고 특별한 조종사 훈련 및 인가를 필요로 한다. 각 항공사의 OpSpecs는 이러한 유형의 접근에 대한 요구 사항과 성능 기준을 자세히 명시한다. 각 운영자가 CAT II/III를 수행하도록 승인된 장소의 목록 또한 OpSpecs에서 확인할 수 있다.
Special Authorization approaches는 조종실 항전 장치 및 장비의 발전(예를 들어 Head-Up Displays와 automatic landings)을 사용하도록 설계되었다. standard CAT II/III의 경우 광범위한 지상 인프라 조건과 등화 조건을 가지고 있다. Special Authorization approaches는 항공기의 최신 항전 장치를 통해 일부 등화 문제를 완화한다. Special Authorization CAT I/II를 수행하기 위해선 OpSpecs Part C에서 특별 승인을 받아야 한다.
Simultaneous Approaches To Parallel Runways
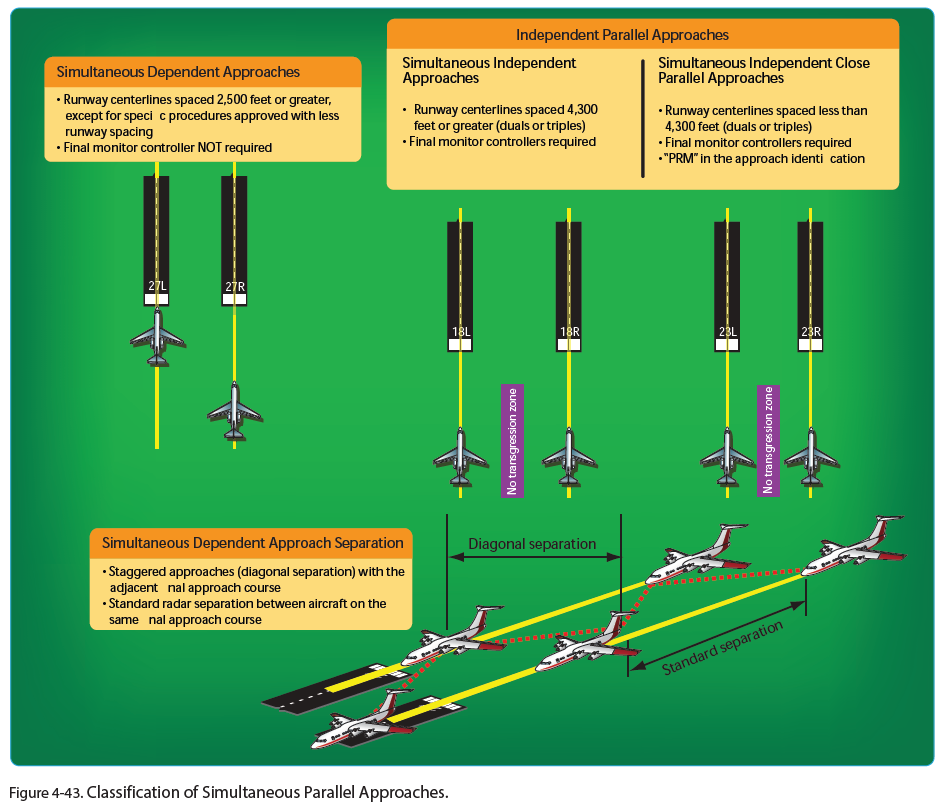
두 개 이상의 parallel runways를 갖춘 공항의 경우 공항 수용력을 증가시키기 위해 simultaneous parallel approaches가 승인될 수 있다. 활주로 중심선 간격 및 ATC 절차에 따라 simultaneous parallel approaches가 세 가지로 분류된다: simultaneous dependent approaches, simultaneous independent approaches, 그리고 simultaneous independent close parallel approaches. simultaneous dependent approach는 활주로 중심선 간격에 대한 최소 거리가 더 짧을 수 있다는 점에서 simultaneous independent approach와 다르다. 인접한 final approach course에서 항공기의 staggered separation이 필요하다. 허나 NTZ(No Transgression Zone)이나 Final Monitor Controllers가 필요하지는 않다. independent approach는 staggered approaches를 필요로 하지 않으므로 항공기가 나란히 있을 수 있으며 속도가 다른 경우 추월도 가능하다.
NOTE:
1. RNAV approach를 수반하는 simultaneous approaches의 경우 접근 명칭에 (GPS)가 표시되어 있거나, 혹은 GPS가 필요하다는 chart note가 명시되어 있어야만 수행될 수 있다. simultaneous approaches에 대한 조종사 책임은 위의 “ILS Approaches” paragraph를 참조하라.
2. simultaneous operations에 대한 Flight Director 조건이나 Autopilot 조건이 접근 차트에 표시된다.
3. 계기 접근 차트에서 simultaneous approaches를 특별히 승인하는 경우에만 simultaneous approaches를 수행할 수 있다.
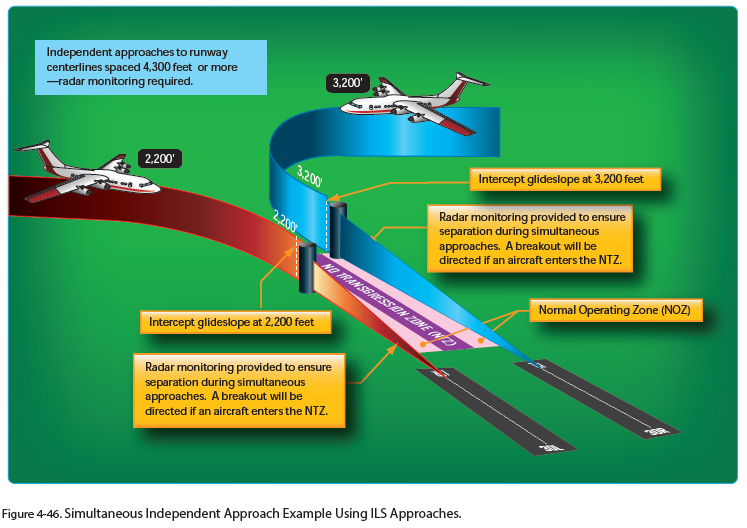
Simultaneous Dependent Approaches [그림 4-46]
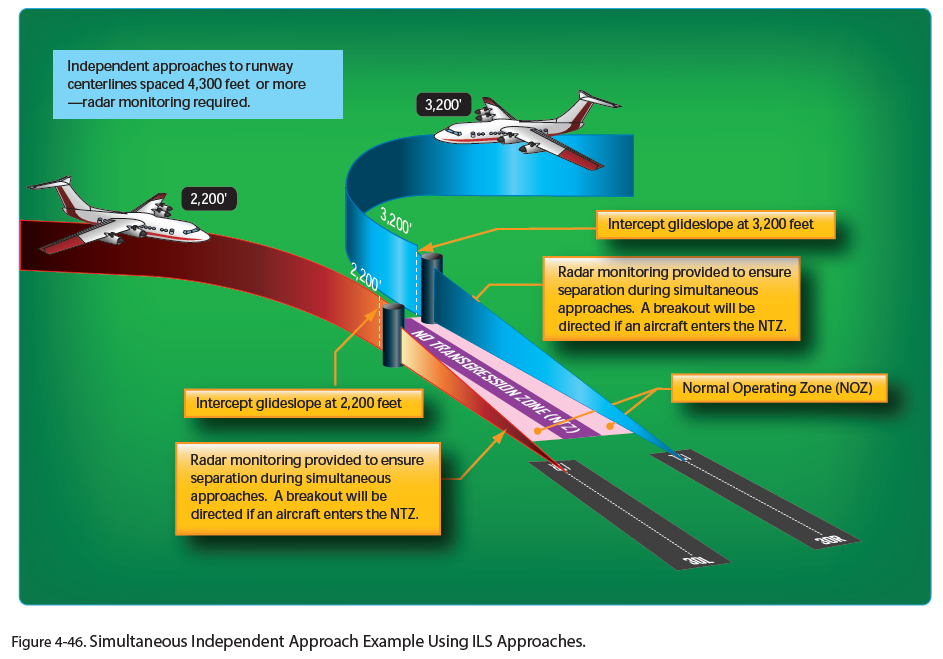
simultaneous dependent approaches가 제공되는 경우 ATC는 서로 인접한 final approach courses에 놓인 항공기간에 특정 대각선 분리 기준을 적용한다. final에서 항공기는 활주로 중심선 간격에 따라 최소 1NM의 분리 간격을 두고 엇갈리게 된다. 활주로 중심선 간격이 커질수록 더 큰 분리 기준이 적용된다. [그림 4-43]
2,500ft 미만의 특정 활주로 중심선 간격과 threshold staggers를 갖춘 일부 공항에서 simultaneous dependent instrument approaches를 수행할 수 있다. ATC는 감소된 대각선 분리 간격을, 그리고 special wake turbulence procedure를 적용할 수 있다. dependent pair의 선행 항공기는 small aircraft나 large aircraft로 제한되며 더 낮은 접근으로 승인된다. 접근의 설계, 항공기 무게 유형, 그리고 두 접근간의 측면 분리는 해당 운영에 필요한 wake turbulence avoidance를 제공한다. wake turbulence avoidance를 위한 접근 설계의 예로 일부 지역에서는 인접 접근들이 서로 다른 glide slope angles를 사용한다. 또한 staggered thresholds도 도움이 된다. ATIS의 예는 다음과 같다: “Simultaneous ILS Runway 28 Left and ILS Runway 28 Right in use.” 자세한 정보는 FAA Orders JO 7110.65과 JO 7110.308을 참조한다.
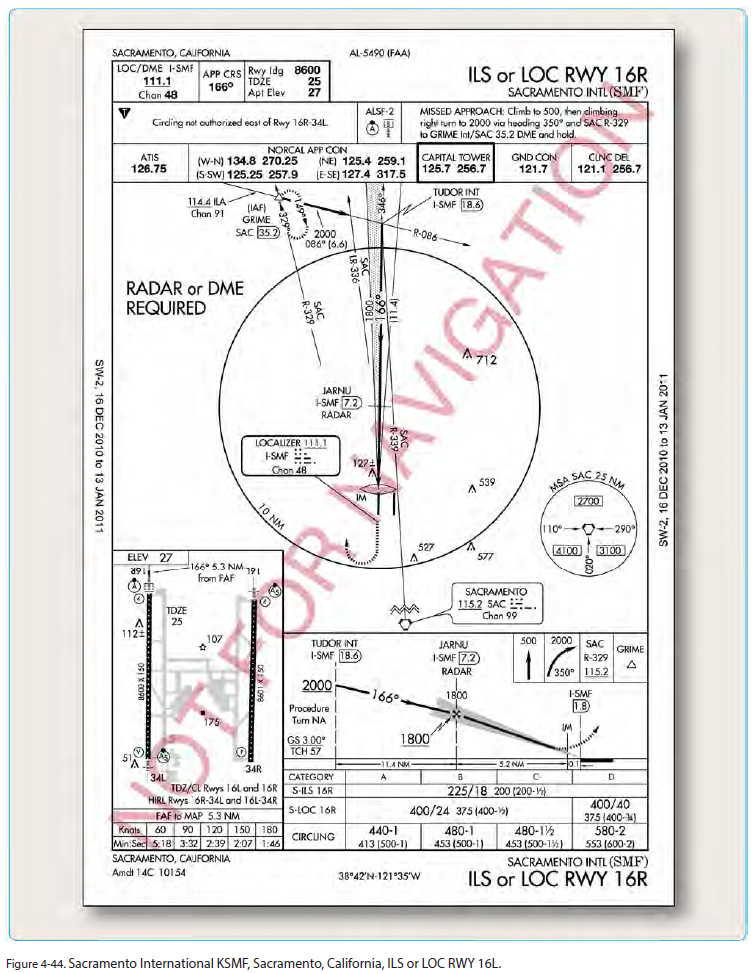
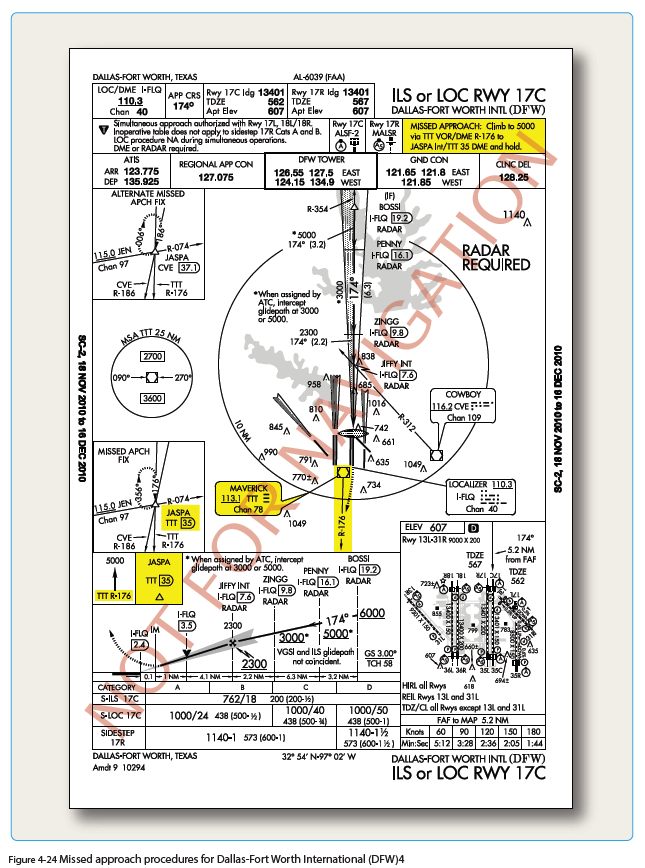
simultaneous approach operations가 승인된 경우 각 접근 차트는 종종 simultaneous approaches가 수행될 수 있는 다른 활주로(들)를 나타낸다(예를 들어, “Simultaneous approaches authorized with runway 12L”). 절차들이 개정됨에 따라 chart note가 “Simultaneous approach authorized”로 수정되며 다른 활주로나 접근 유형이 표시되지 않는다. 왜냐하면 자세한 정보는 ATIS나 ATC를 통해 전송되기 때문이다. 예를 들어 Sacramento, California로 향하는 조종사는 parallel approach procedures를 마주할 수 있다. [그림 4-44] “Simultaneous approaches authorized”를 명시하는 chart note가 없는 경우에는 parallel approaches에 놓인 항공기간에 standard separation이 적용된다.
Simultaneous Independent Approaches
dual/triple simultaneous independent parallel instrument approaches는 특정 활주로 중심선 간격을 갖춘 공항에서 승인된다. simultaneous independent approach가 승인되기 위해선 NTZ가 설정되어야 한다. NTZ의 바깥 부분인 NOZ(normal operating zones)는 정상 접근 도중 항공기가 유지하는 운영 영역을 나타낸다. NOZ의 폭은 활주로 중심선 간격에 따라 달라진다. NTZ는 final approach courses 사이에 위치한 2,000ft 폭의 영역으로 규정된다. simultaneous operation 도중에는 해당 영역을 비행할 수 없다. [그림 4-46] 항공기가 NTZ를 침범한 경우, 혹은 침범하리라 예상되는 경우 ATC는 final approach course에 놓인 다른 항공기에게 접근을 중단하라는 지시를 발부한다.
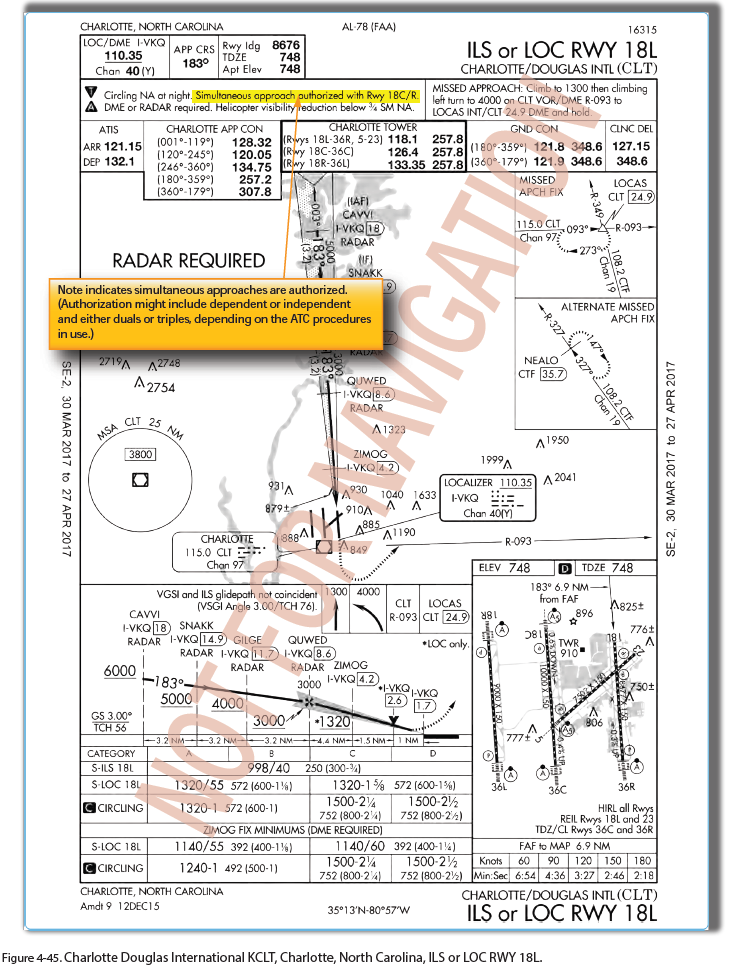
또한 각 활주로에 대한 관제사도 필요하다. 각 활주로에 대한 final monitor controllers는 분리를 모니터링 하고, 항공기 위치를 추적하며, final approach course를 벗어난 항공기에게 지시를 발부한다. [그림 4-45] 이러한 운영은 보통 vertical guidance를 갖춘 ILS, LDA, 그리고 RNAV approach에 대하여 승인된다. simultaneous parallel ILS approach operations의 경우 조종사는 chart notes를 검토하여 non-precision LOC procedure의 승인 여부를 확인해야 한다(지상 장비, 혹은 항공기에서 glide slope 고장이 발생한 경우). LOC procedure에 대한 제한의 예시는 그림 4-24의 notes에 나타나 있다: “LOC procedure NA during simultaneous operations.” 마찬가지로 RNAV(GPS) approaches의 경우 simultaneous operations 도중 LNAV procedures가 제한되는 경우가 많다.
활주로 중심선 간격이 최소 3,900ft인 경우 triple simultaneous independent approaches가 승인된다. 바깥쪽 활주로들 중 한 개나 두 개가 2.5 ~ 3.0도의 offset approach course를 갖춘 경우 해당 활주로와 중앙 활주로 사이의 간격이 3,000ft로 감소될 수 있다.
Simultaneous Close Parallel Precision Runway Monitor(PRM) Approaches
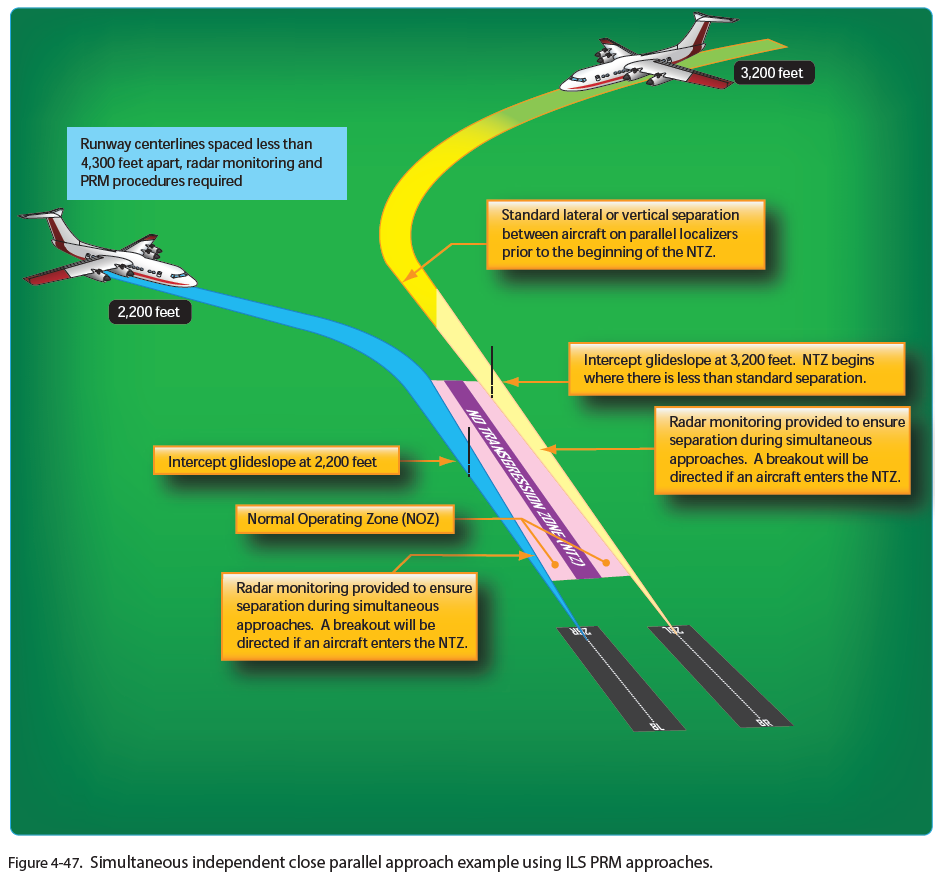
simultaneous close parallel(independent) PRM approaches는 활주로 중심선 간격이 4,300ft 미만인 특정 공항에 대해 승인된다. [그림 4-47] 특정 PRM approaches는 Simultaneous Offset Instrument Approaches(SOIA)라 불린다.
PRM procedures는 활주로 간격이 가까운 공항의 수용력을 증가시키는 가장 효율적인 방법이다. 시정이 낮을 경우 ATC는 simultaneous close parallel(independent) approaches를 모니터링 함으로써 수용력을 증가시킨다. PRM operations는 지연을 줄이고 연료 절감 효과를 높인다. 과거 RPM system은 업데이트 속도가 빠른 레이더, 고해상도의 ATC 레이더 화면, 그리고 항공기를 실시간으로 추적할 수 있는 소프트웨어를 필요로 하였다. 오늘날 대부분의 PRM operations는 업데이트 속도가 빠른 레이더 없이도 수행된다(단, 이러한 접근을 수행하기 위한 다른 조건들이 모두 충족되는 경우).
PRM approaches에 대한 특별한 교신 조건과 ATC 조건이 있다. PRM approaches는 각 활주로에 대한 final NTZ monitor controller를, 각 활주로에 대한 tower controller를, PRM tower frequency를, 그리고 각 활주로에 대한 PRM frequency를 필요로 한다. 각각의 final monitor controller는 별도의 PRM frequency를 가지며 tower controller는 하나의 PRM tower frequency를 가진다. 조종사는 PRM tower frequency를 통해 송수신을 수행하지만 특정 활주로에 대한 PRM frequency를 계속 모니터링 한다. final monitor controller는 override 기능을 갖추고 있다. 해당 기능 덕분에 설령 PRM tower frequency가 차단되었다 하더라도 조종사는 PRM frequency를 통해 final monitor controller의 지시를 들을 수 있다. 조종사는 PRM procedures를 사용하기 전에 특정 교육을 받아야 한다. PRM 웹사이트(https://www.faa.gov/training_testing/training/prm)에 PRM approaches에 대한 교육 정보가 포함되어 있다. PRM approach를 원치 않는 경우 조종사는 즉시 ATC에 알려야 한다. PRM approach를 수락할 수 없는 경우 지연이 발생할 수 있다.
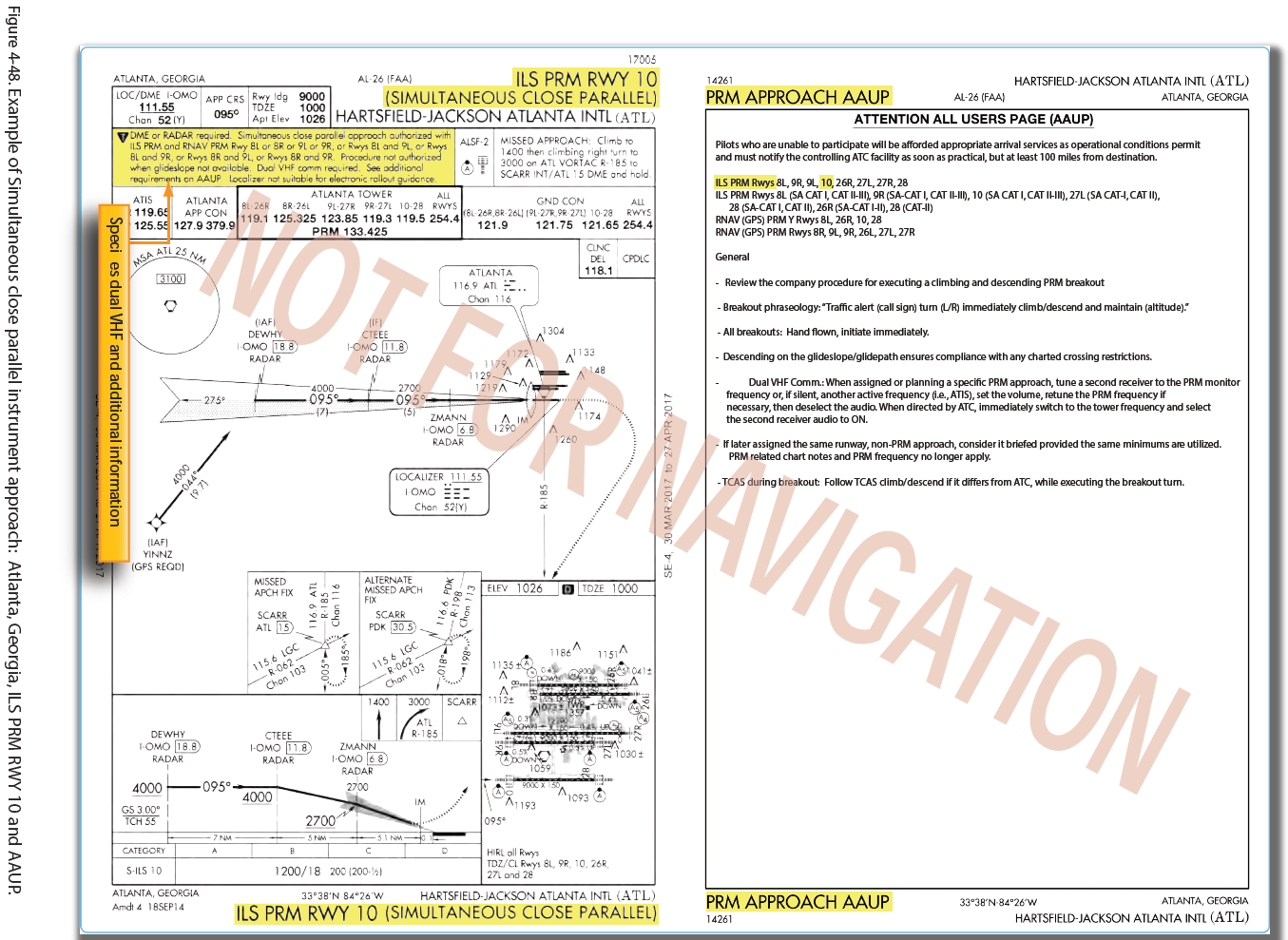
PRM approach를 위해선 이와 관련된 AAUP page를 검토해야 한다. 여기에는 PRM operations에 필요한 조종사, 항공기, 그리고 절차 조건들이 요약되어 있다. [그림 4-48] 조종사는 이러한 유형의 접근과 관련된 차이점을 알아야 한다. 해당 접근이 이 외의 simultaneous approaches와 다른 점은 다음과 같다:
∙안전이 허락하는 즉시 break out instructions를 따른다.
∙AAUP를 사용한다.
∙dual VHF communications를 사용한다.
∙PRM 훈련을 필요로 한다.
∙모든 breakout instruction을 직접 비행한다. 드물기는 하지만 descending breakouts가 발부될 수도 있다. MVA 미만으로 breakout instructions가 발부될 일은 절대 없으며 조종사는 1,000fpm 이상으로 하강하지 않아도 된다.
∙PRM approach를 수행하기 위해 TCAS(Traffic Alert and Collision Avoidance System)이 필요하지는 않다. 해당 장비를 갖춘 항공기의 경우 만약 관제사의 상승/하강 지시가 TCAS RA(resolution advisory)와 다르다면 조종사는 관제사의 선회 지시를 따름과 동시에 RA를 따라야 한다. 해당 편차를 최대한 빨리 ATC에 보고해야 한다.
Simultaneous Offset Instrument Approaches(SOIAs)
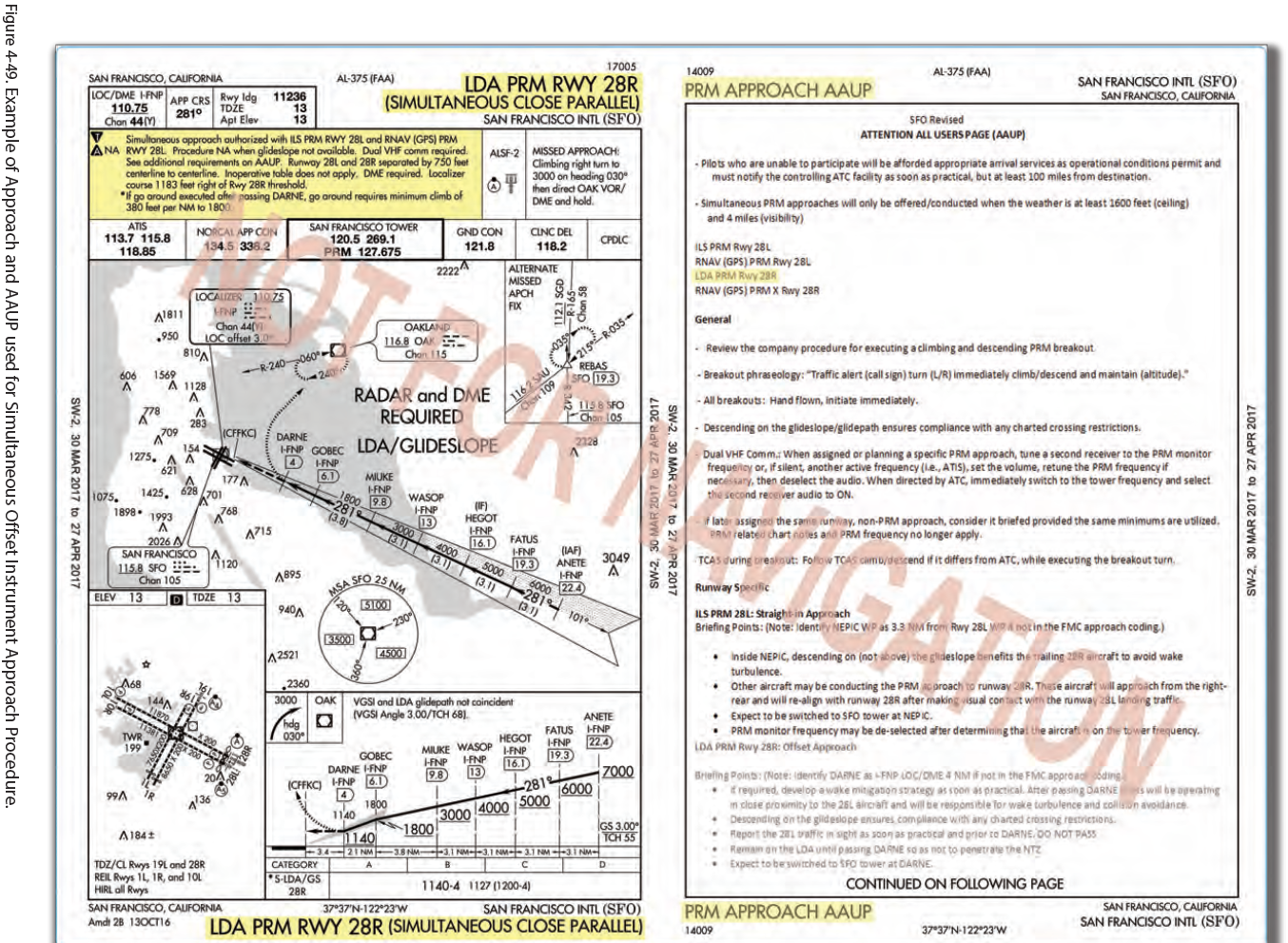
SOIA는 750 ~ 3,000ft의 간격을 갖춘 두 개의 parallel runways에 대하여 simultaneous approaches를 허용한다. 과거 SOIA procedure는 하나의 활주로에 대해 ILS/PRM approach를, 그리고 다른 활주로에 대해 offset LDA(localizer-type directional aid)/PRM approach with glideslope를 사용하였다. 이제 SOIA는 RNAV(GPS) approach와 RNAV(RNP) approach에 대해서도 사용될 수 있다. 접근 차트는 다음과 같은 notes를 포함한다: “Simultaneous Close Parallel approach authorized with LDA PRM RWY 28R and RNAV (GPS) PRM X RWY 28R”, 혹은 “Simultaneous approach authorized.” [그림 4-49]
SOIA ILS/PRM and LDA/PRM approaches에 대한 훈련, 절차, 그리고 시스템 조건은 simultaneous close parallel ILS/PRM approaches와 동일하다(단, LDA/PRM approach MAP 근처에 도달하기 전까지.LDA 항공기는 해당 지점에 도달하기 전까지 ILS 항공기를 육안으로 확인해야 한다.) LDA MAP에 도달하기 전에 ILS/PRM 항공기를 확인하지 못하였다면 실패 접근을 수행해야 한다. LDA/PRM approach에 대한 visual segment는 LDA MAP와 runway threshold 사이에 설정된다. 해당 구간에서 항공기를 활주로와 정렬하기 위해 LDA course로부터 기동한다. 정상적으로 기동할 경우 활주로 연장선으로부터 약 500ft(AGL) 지점에서 안정될 수 있다. LDA MAP와 활주로 사이에서 조종사는 충돌을 회피할, 그리고 wake turbulence를 완화할 책임을 가지고 있다.
Converging ILS Approaches
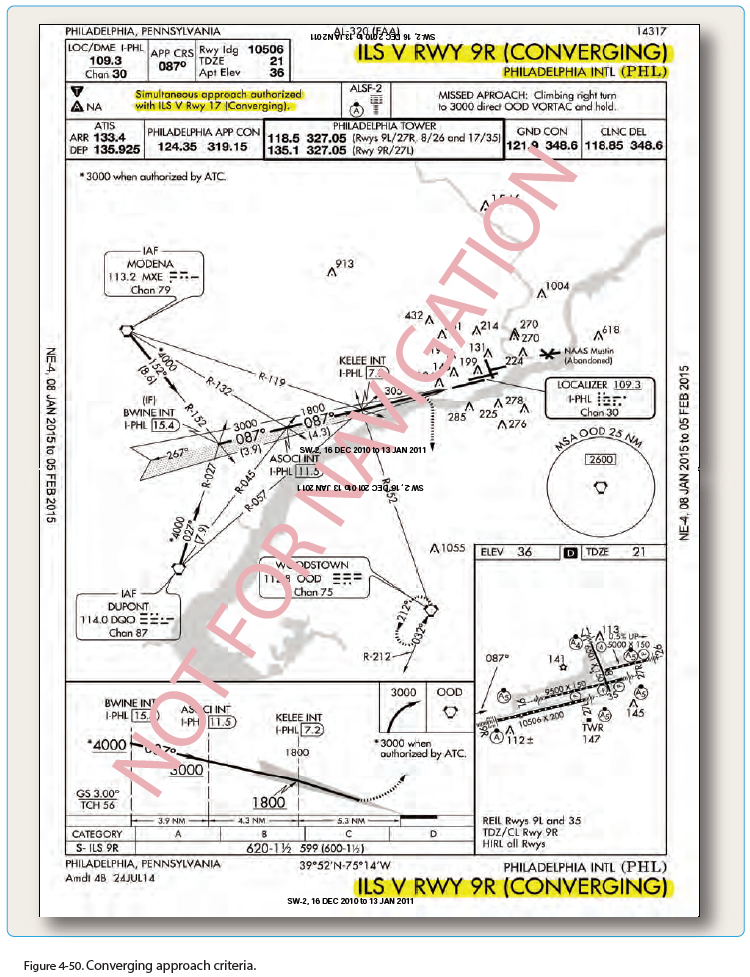
ILS approach의 수용력을 늘릴 수 있는 또 다른 방법은 converging approaches를 사용하는 것이다. 해당 접근은 15 ~ 100도로 교차하는 활주로들을 갖춘 공항에서 설정될 수 있으며 각 활주로에는 ILS가 있어야 한다. 또한 각 접근에 대한 별도의 절차가 설정되어야 한다. 각 접근의 MAP는 최소 3NM의 간격을 갖춰야 하며 missed approach airspace가 겹쳐선 안 된다. converging ILS procedures의 경우 straight-in approaches만이 승인된다. 활주로가 서로를 가로지르는 경우에는 관제사가 intersecting runway의 항적을 육안으로 분리할 수 있어야 한다.
intersecting runways에 대한 접근은 보통 높은 minimums를 가진다(일반적으로 600ft ceiling 및 1 1/4 ~ 2SM visibility). 조종사는 관제사와의 initial contact를 통해, 혹은 ATIS를 통해 converging ILS approaches의 사용 여부를 통보받는다. [그림 4-50]
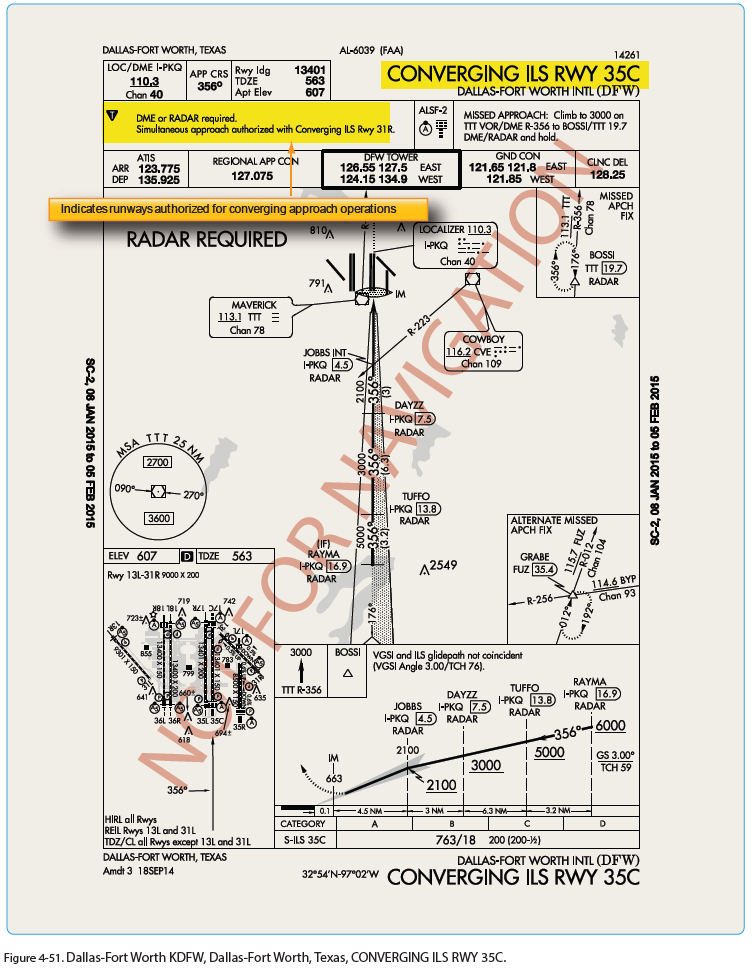
Dallas/Forth Worth International airport는 여러 개의 parallel runways와 두 개의 offset runways로 인하여 converging ILS approaches를 사용하는 몇 안 되는 공항들 중 하나이다. [그림 4-51] 접근 차트의 명칭이 converging approaches를 나타내며 notes section은 converging approach procedures가 승인된 다른 활주로를 명시한다. IAP의 차트 명칭이 약간 다르다는 점을 유의하라. 곧 모든 Converging ILS procedures는 그림 4-50의 최신 형식으로 표시된다(차트 명칭에 “V”가 사용되며 괄호 안에 “CONVERGING”이 나타남).
VOR Approach
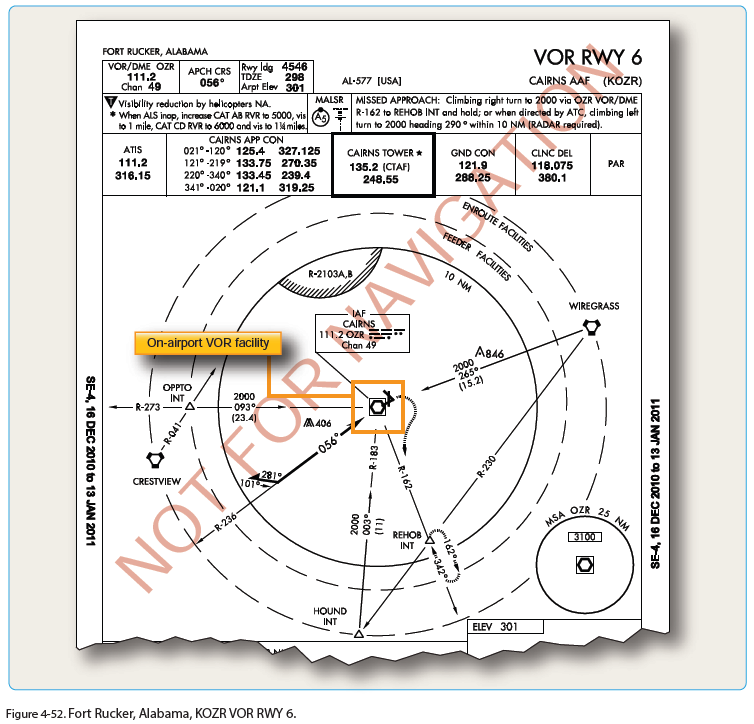
VOR은 가장 널리 사용되는 비정밀 접근 형식들 중 하나이다. VOR approach는 공항의 안팎에 위치한 VOR 시설을 통해 접근을 설정하며 다양한 장비(예를 들어 DME와 TACAN)를 사용한다. VOR approach는 다양한 옵션들을 포함하므로 TERPS는 on airport VOR facility에 대한, off airport VOR facility에 대한, FAF를 갖춘 VOR approach에 대한, 그리고 FAF를 갖추지 아니한 VOR approach에 대한 설계 기준을 간략히 설명한다. 다양한 구성에도 불구하고 모든 VOR approaches는 비정밀 접근이고, 제대로 작동하는 VOR 장비를 필요로 하며, 최대 250ft의 MDA를 제공할 수 있다. 또한 접근이 VOR을 향하도록, 혹은 VOR로부터 멀어지도록 수행될 수 있다는 장점이 제공된다.
다음은 VOR 시설이 공항에 위치하는, 그리고 FAF가 지정되지 않은 VOR approach의 예시이다. [그림 4-52] straight-in approach의 경우 final approach course는 보통 runway threshold로부터 연장된 3,000ft 길이의 활주로 중심선과 교차하도록, 그리고 이 둘 사이의 수렴 각도가 30초를 초과하지 않도록 정렬된다. 또한 해당 접근은 final approach area에서 최소 300ft의 장애물 회피를 제공한다. final approach area criteria는 primary area를 갖추고 있다. primary area는 VOR 시설에서 2NM의 폭을 가지며 시설로부터 10NM 거리에서는 6NM의 폭으로 확장된다. high altitude teardrop approach penetration을 필요로 하는 course에는 추가적인 approach criteria가 설정된다.
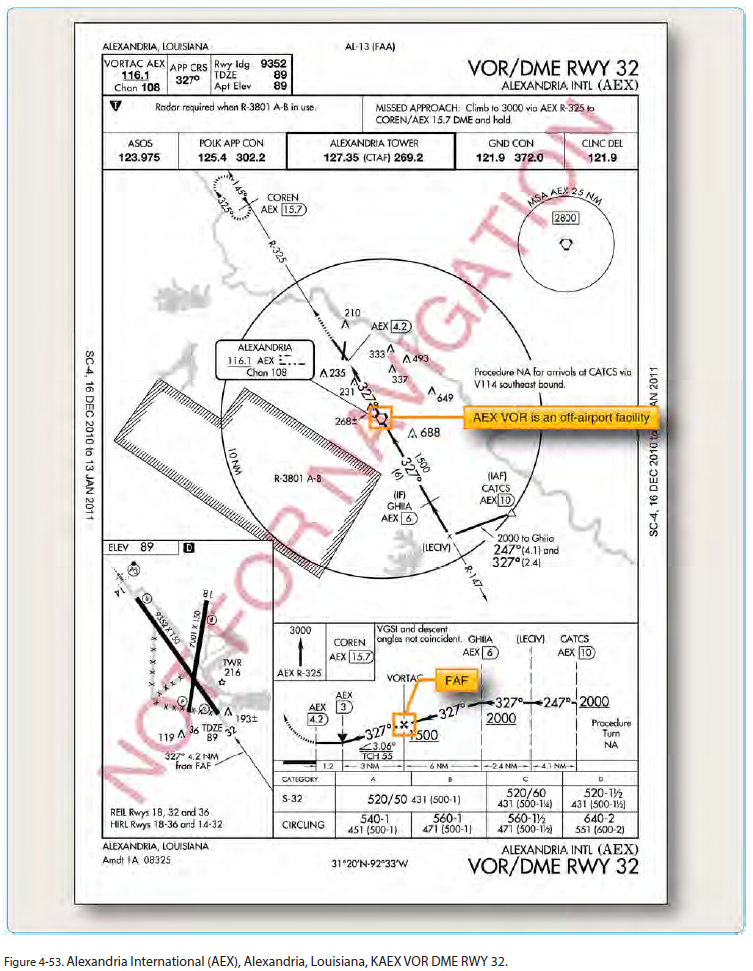
VOR approach의 명칭에 DME가 포함된 경우에는 항공기에 DME가 설치되어 있어야 한다. DME를 사용하면 timing 없이도 위치를 정확하게 결정할 수 있다. 이는 접근 도중 상황 인식을 크게 향상시켜준다. 다음은 VOR이 공항에 위치하지 않은, 그리고 FAF가 지정된 VOR/DME approach의 예시이다. [그림 4-53] 이 경우 final approach course는 radial이거나 straight-in final approach이며 활주로 중심선(runway threshold에서의)과 30도 이하로 교차되도록 설계된다.
VOR/DME approach와 관련된 arc final approach segment criteria는 VOR로부터 7 ~ 30NM에 놓인 arc를 기초로 하며 활주로 중심선과 arc 접선 사이의 수렴 각도에 따라 달라진다. primary area(arc 중심선으로부터 양쪽 4NM)에서 최소 500ft의 장애물 회피가 보장된다.
NDB Approach
NDB approach 또한 공항 안팎의 시설을 사용하여 설계될 수 있다. 한때는 NDB approach를 배우는 것이 일반적이었으나 GPS의 사용 빈도가 증가함에 따라 조종사들은 더 이상 계기 접근을 위해 NDB를 사용하지 않는다. 또한 NDB만이 운영되는 공항에 새로운 RNAV approaches가 구축되고 있다. NDB 시설을 점진적으로 철수시키는 것이 장기적 계획이며 결국에는 NDB approach가 사라질 것이다.
다음은 on-airport NDB를 통해 설정된, 그리고 FAF를 포함하지 않는 NDB approach의 예시이다. [그림 4-54] 이 경우 procedure turn이나 penetration turn이 approach design의 일부가 되어야 한다. NDB가 on-airport facility로 간주되기 위해선 해당 시설이 착륙 활주로의 일부로부터 1마일 이내에 위치해야 한다(이는 straight-in approaches의 경우에 해당한다. circling approaches의 경우에는 이용 가능한 착륙 표면의 일부로부터 1마일 이내에 NDB가 위치해야 한다). final approach segment area는 NDB 시설에서 2.5NM의 폭을 가지며 시설로부터 10NM 거리에서는 8NM의 폭으로 확장된다. 또한 straight-in approaches의 경우 final approach course와 활주로 연장선 사이의 수렴 각도가 30도를 초과해서는 안 된다. 이러한 유형의 NDB approach는 최소 350ft의 장애물 회피를 제공한다.
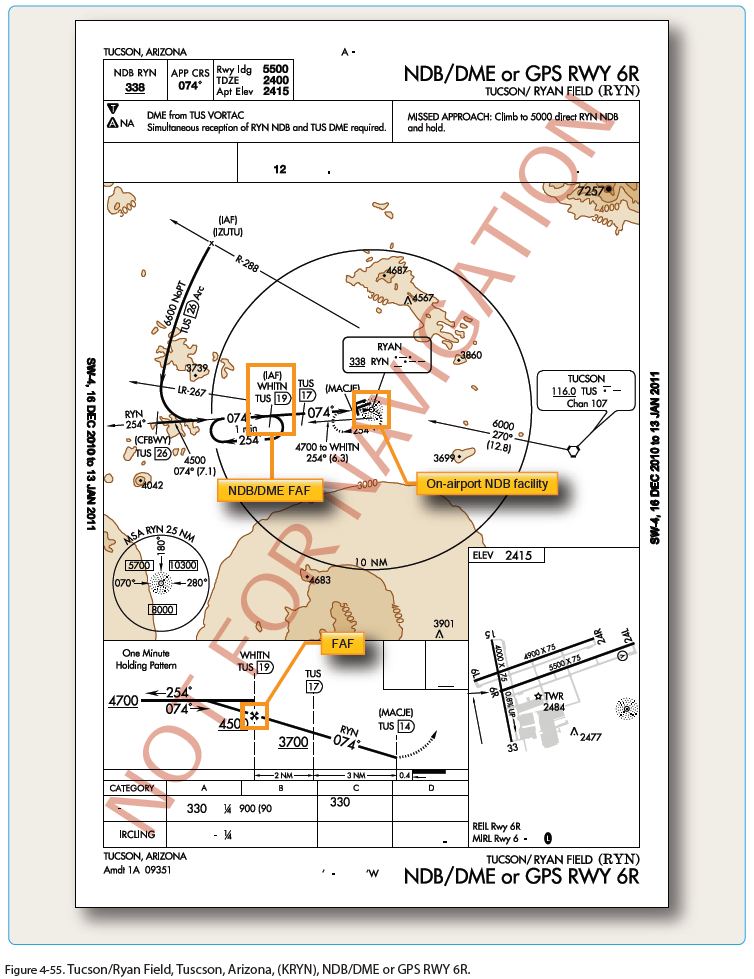
NDB approach에 대해 FAF가 설정된다면 approach design criteria가 바뀐다. 또한 NDB가 공항 안에 위치하는지 공항 바깥에 위치하는지도 고려된다. 이러한 유형의 접근은 NDB facility로 향하도록, 혹은 멀어지도록 만들어질 수 있다. 다음은 on-airport NDB와 DME를 사용하는, 그리고 FAF를 갖춘 접근의 예시이다. [그림 4-55] 경로 정렬 기준과 장애물 간격은 FAF를 갖추지 아니한 NDB approach와 동일하다. 허나 final approach segment area는 NDB 시설에서 2.5NM의 폭을 가지며 시설로부터 15NM 거리에서는 5NM의 폭으로 확장된다.
Radar Approaches
조종사가 이용할 수 있는 두 가지 유형의 radar approaches는 PAR(precision approach radar)와 ASR(airport surveillance radar)이다. 조종사 요청 시 radar approaches가 제공될 수 있다. 또한 ATC는 기상 조건에 관계없이 재난(distress) 항공기에게 radar approach 선택권을 제공할 수 있으며 필요한 경우 항적을 신속하게 처리하기 위해서도 radar approach 선택권을 제공할 수 있다. 비록 radar approach environment 내에서 ATC가 통제권을 행사한다 하여도 조종사는 OpSpecs를 고려함으로써 해당 접근의 minimums가 현재 기상 조건에 적합한지를 확인해야 한다.
radar approach의 가장 큰 장점은 no gyro approach를 수행할 수 있다는 점이다. 표준율 선회라 가정하였을 때 ATC는 선회의 시작 시점과 종료 시점을 알려줄 수 있다. heading indicator가 고장 나서 partial panel instrument flying이 필요한 경우 조종사는 해당 접근을 사용해야 한다.
radar approaches에 대한 정보는 TPP 책자의 앞부분에 표 형식으로 게재되어 있다. PAR, ASR, 그리고 circling approach에 대한 정보(활주로, DA/DH/DMA, HAA(height above airport), HAT, ceiling, 그리고 visibility 기준 포함) 특정 공항별로 나열되어 있다.
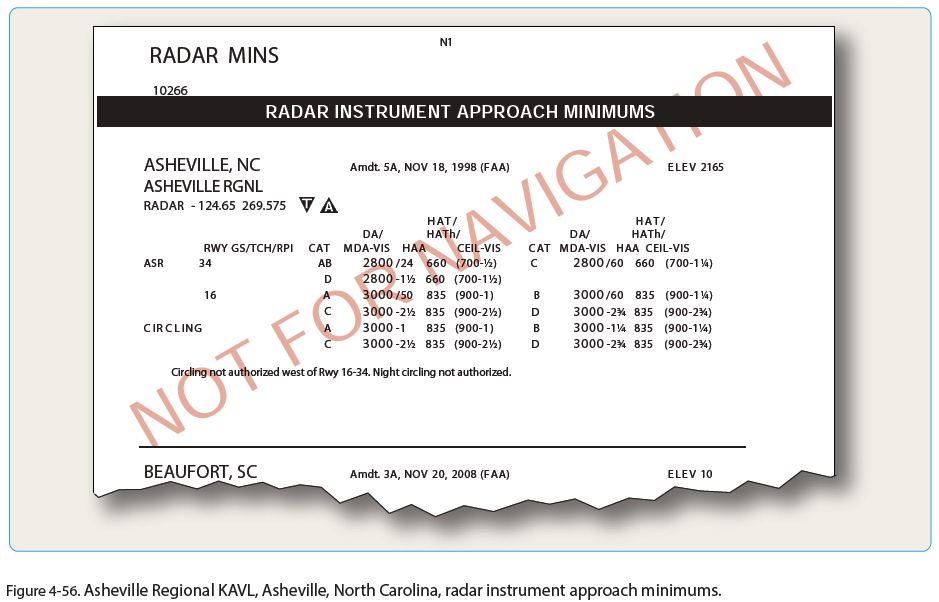
접근 도중 ATC는 항공기의 위치를 모니터링하며 특정 heading 및 altitude 정보를 발부한다. 접근이 시작되기 전에 통신 두절 절차에 대한 브리핑이 제공되어야 한다. 이는 통신 두절 발생 시 ATC가 예상하는 바를 조종사로 하여금 포괄적으로 이해시키기 위함이다. 또한 radar approach를 시작할 때 ATC는 기상, 그리고 실패 접근에 대한 추가 정보를 제공한다. [그림 4-56]
Precision Approach Radar(PAR)
PAR은 vertical guidance, lateral guidance, 그리고 거리 정보를 모두 제공하며 현존하는 가장 정밀한 radar approach이다. 허나 radar approach는 조종실 내에 시각적 접근 지시를 제공할 수 없다. 따라서 조종사는 관제사의 지시에 귀를 기울이고 이를 따라야 한다. PAR approaches는 매우 드물며 대부분 군 기지에서 사용된다. 따라서 이러한 접근을 연습할 수 있는 기회는 모든 조종사에게 도움이 된다.
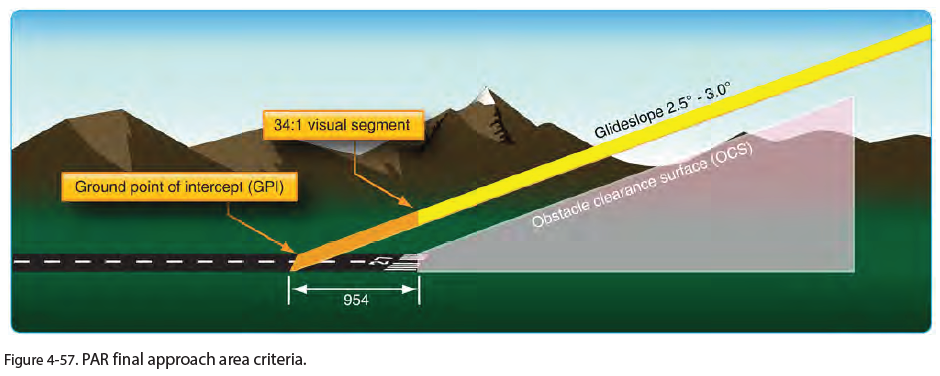
PAR approach의 final approach course는 보통 활주로 중심선과 정렬되며 glideslope은 보통 2.5 ~ 3도이다. final approach area에 대한 장애물 회피 거리는 특정 glideslope 각도를 기초로 하며 정확한 공식은 FAA Order 8260.3에 설명되어 있다. [그림 4-57]
Airport Surveillance Radar(ASR)
ASR approaches는 보통 ATC의 운영상 조건, 혹은 비정상/비상 상황 조건에 의해 필요한 경우에만 승인된다. 이러한 유형의 레이더는 거리 heading 정보와 range 정보만을 제공한다. 허나 관제사는 활주로로부터의 거리를 기초로 항공기가 위치해야 할 고도를 조종사에게 알려줄 수 있다. 공항으로부터 20NM 이내에 안테나를 갖춘, 그리고 FAA Order 8200.1, U.S. Standard Flight Inspection Manual에서 명시하는 장비 조건을 충족하는 레이더 시설에 ASR approach procedure가 설정될 수 있다. 레이더 성능 저하로 인하여 CENRAP(Center Radar ARTS processing) procedures가 사용 중인 경우에는 ASR approaches가 승인되지 않는다.
ASR approach의 final approach course는 straight-in approaches의 경우 활주로 중심선에, 그리고 circling approaches의 경우 공항의 중앙에 정렬된다. final approach area 내에서 조종사는 최소 250ft의 장애물 회피를 보장받는다. ASR descent gradients는 비교적 평평하게 설계되었으며 최적의 gradient는 1마일 당 150ft이다(허나 1마일 당 300ft를 초과할 수는 없다).
Localizer Approaches
localizer는 다양한 계기 비행 조건을 충족하는 응용 프로그램을 제공한다. 주변 지형으로 인하여 ILS glideslope이 설치되지 못할 수도 있다. localizer는 하나의 접근 시스템에서 네 가지 유형의 비정밀 접근을 제공할 수 있다:
∙Localizer approach
∙Localizer/DME approach
∙Localizer back course approach
∙Localizer-type directional aid (LDA)
Localizer and Localizer DME
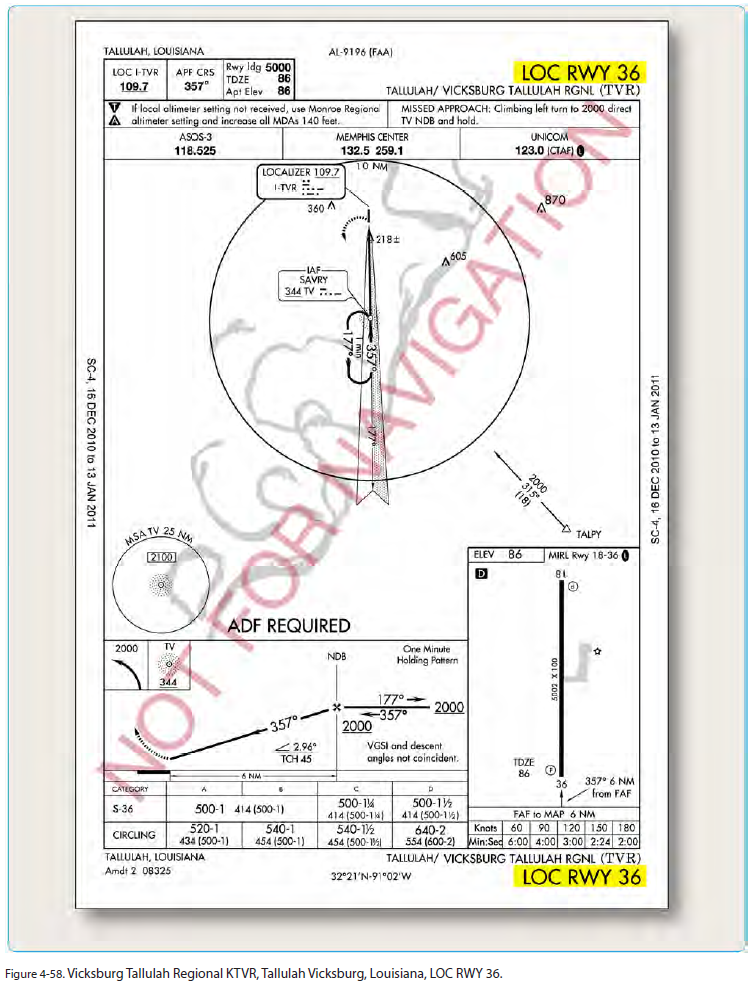
localizer approach system은 조종사에게 정밀 접근 기능과 비정밀 접근 기능을 모두 제공할 수 있다. localizer가 ILS 시스템의 일부인 경우에는 정밀접근을 위한 horizontal guidance를 제공한다. localizer에 대하여 논의될 때 보통 공항에 설치된 접근 시스템이 localizer뿐이거나, 혹은 ILS에서 glideslope이 작동하지 않는 상태이기 때문에 비정밀 접근으로 간주된다. 어떠한 경우이든 localizer는 특정 공항에 설치된 localizer transmitter를 통해 비정밀 접근을 제공한다. [그림 4-58]
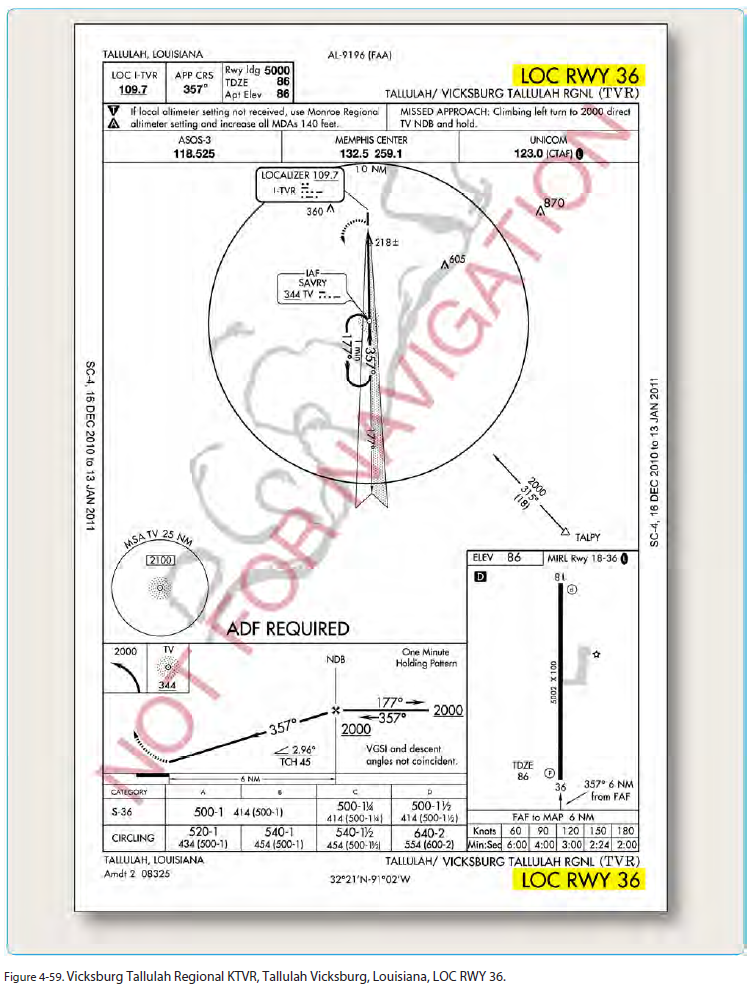
localizer approach에 대한 alignment criteria는 ILS와 동일하다. 왜냐하면 localizer approach는 사실상 glideslope의 vertical guidance를 제외하곤 ILS와 같기 때문이다. localizer는 항상 활주로로부터 3도 이내로 정렬되며 final approach area에서 최소 250ft의 장애물 회피를 제공한다. localizer DME(LOC DME) approach의 경우에는 거리 정보를 제공하는 DME가 함께 배치되어 있다. [그림 4-59]
Localizer Back Course
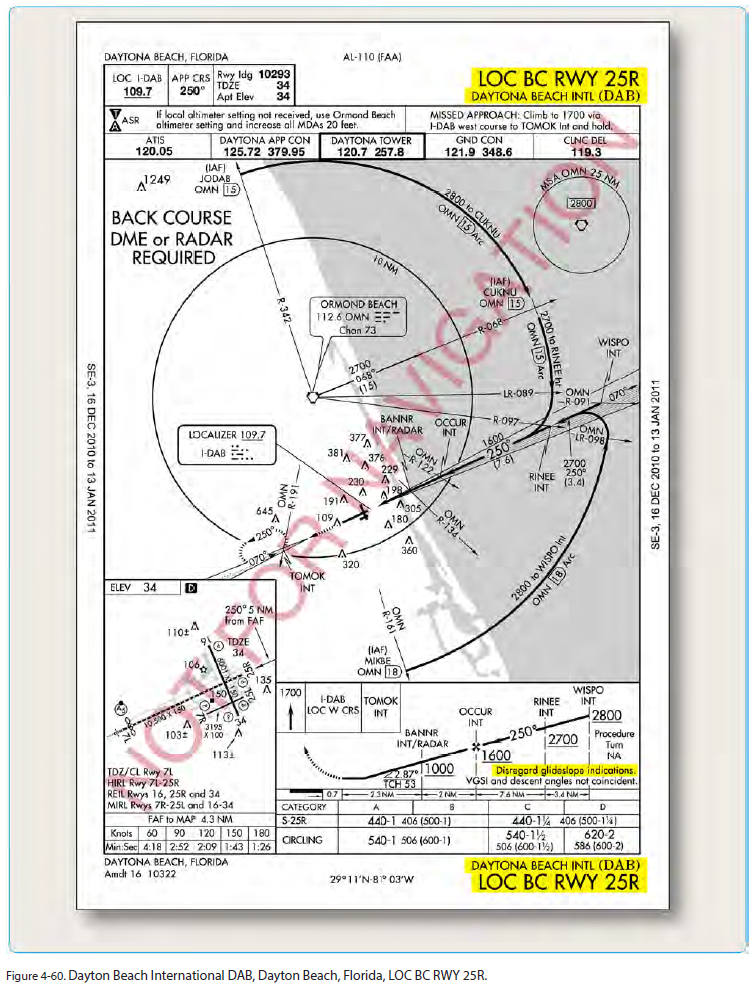
ILS가 설치된 경우 localizer를 통해 back course를 이용할 수 있다. back course는 localizer와 마찬가지로 glideslope을 제공하지 않는다. 허나 back course가 false glideslope signal을 투사할 수도 있으므로 glideslope을 무시해야 한다. standard VOR을 사용하는 경우에는 back course에서 reverse sensing이 발생한다. 허나 HSI(horizontal situation indicator) system을 사용하는 경우에는 reverse sensing이 발생하지 않는다(단, front course를 올바르게 설정한 경우). [그림 4-60]
Localizer-Type Directional Aid(LDA)
LDA는 localizer와 유사한 유용성 및 정확도를 제공하긴 하지만 ILS의 일부가 아니다. LDA는 보통 6 ~ 12도의 경로 폭을 갖춘 SDF(simplified directional facility)보다 더 정밀한 접근 경로를 제공한다.
LDA는 활주로와 정렬되어있지 않다. course와 runway 사이의 각도가 30도를 초과하지 않는 경우에는 straight-in minimums가 게재될 수 있다. 이 각도가 30도를 초과하는 경우에만 circling minimums가 게재된다.
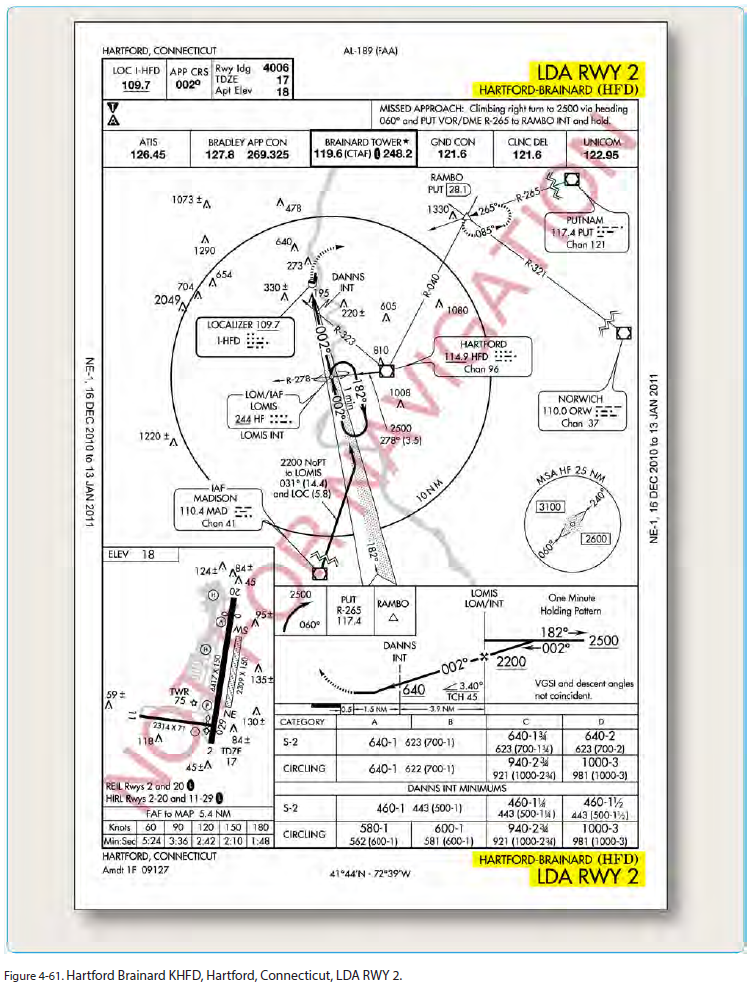
몇몇 LDA approaches는 glideslope를 포함하고 있다. 해당 절차는 차트의 planview에 “LDA/Glideslope”을 표시한다. 이러한 절차는 APV(Approach with Vertical Guidance)라 불리는 새로운 접근 종류에 속한다. glideslope을 갖춘 LDA minima와 glideslope을 갖추지 아니한 LDA minima가 제공되며 접근 차트의 minima lines에 S-LDA/GS와 S-LDA로 표시된다. final approach course가 활주로 중심선과 정렬되지 않으므로 추가적인 기동이 필요하다. [그림 4-61]
Simplified Directional Facility(SDF)
SDF는 ILS localizer와 유사한 final approach course를 제공한다. SDF는 glideslope 정보는 제공하지 않는다. 아래에 설명된 요소들은 SDF의 특징과 사용 방법을 설명한다.
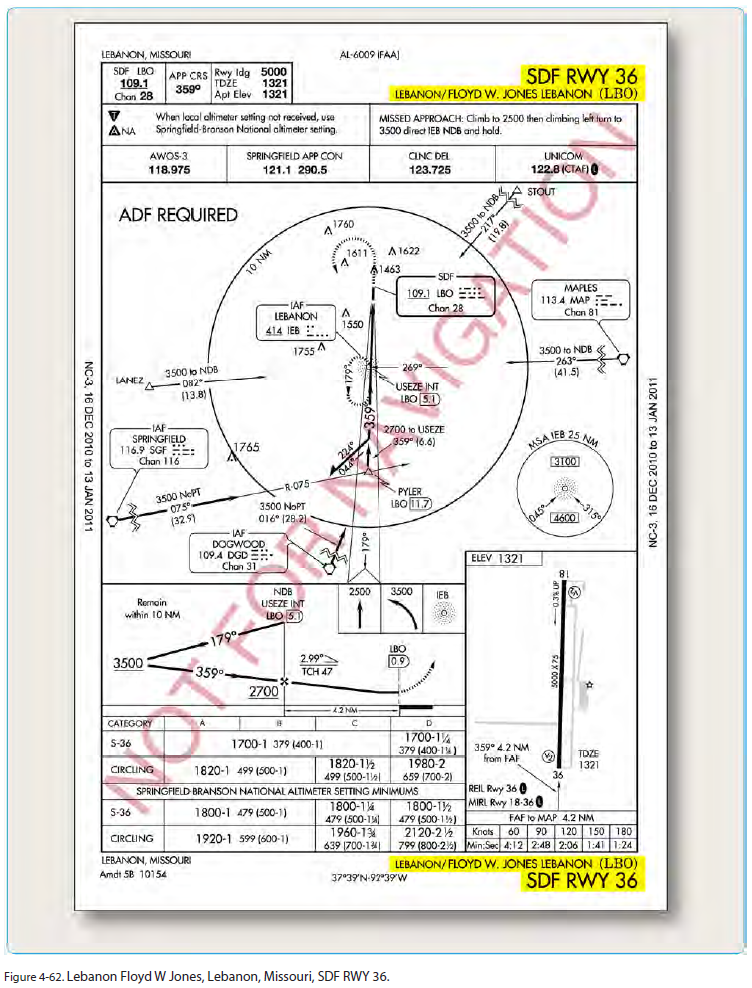
SDF 계기 접근에 사용되는 접근 기법 및 절차는 localizer approach를 수행할 때 사용되는 것과 동일하다(단, SDF course가 활주로와 정렬되지 않을 수도 있음. 또한 course가 더 넓어서 정밀도가 떨어질 수 있음). SDF는 다양한 이유(지형 등등)로 인하여 공항에 설치될 수 있다. straight in approaches의 경우 final approach area(6° course에 대해 규정된 영역)는 최소 250ft의 장애물 회피를 제공한다. 12° course의 경우 final approach area가 더 넓다. 또한 SDF는 최대 400ft/NM의 descent gradient로 설계된다(단, circling only minimums가 인가된 경우 제외). [그림 4-62]
a. FAA는 항공 시스템의 결함에 대한 정보를 위하여 항공안전 자율보고제도를 마련하였다. 이는 안전하지 않은 상황들이 사고로 이어지기 전에 해당 상황들을 식별 및 수정함으로써 가장 안전한 시스템을 보장하기 위한 프로그램이다. 해당 프로그램의 주요 목적은 현재 시스템의 안전성과 효율성을 평가 및 개선하기 위한 정보를 확보하는 것이다.
b. 이러한 안전 보고제도는 조종사, 관제사, 승무원, 정비사, 공역 시스템 사용자, 혹은 그 외 모든 사람들로 하여금 항공 운항의 안전과 관련된 실제적(혹은 잠재적) 결함을 서면으로 제출하도록 요청한다. 해당 프로그램에서 다루는 운영으로는 출항, 항로, 접근, 착륙 운항 및 절차, 항공 교통 관제 절차 및 장비, 조종사와 관제사의 교신, 항공기 객실 운영, 공항 내 항공기 이동, 근공중충돌(near midair collisions), 항공기 정비 및 기록 보관, 그리고 공항 상태나 서비스가 포함된다.
c. 보고서에는 날짜, 시간, 위치, 관련된 사람 및 항공기, 상황의 성격, 그리고 모든 관련 세부 정보가 포함되어야 한다.
d. 정보 수집을 위해 이 프로그램은 잠재적으로 안전하지 않은 사건을 시기적절하게 보고하는 사람들에겐 특정 징계 조치를 면제한다. 시기적절한 보고로 간주되기 위해서는 사고 발생 후 10일 이내에 보고서를 제출해야 한다. 보고서는 NASA ARC Forms 277을 사용하여 제출되어야 한다.
e. FAA는 이 프로그램에 제출된 보고서를 접수 및 분석하는 제 3자로 NASA(National Aeronautics and Space Administration)를 활용한다. 해당 프로그램은 AC 00-46, Aviation Safety Reporting Program에 설명되어 있다.
※ 다음은 항공안전법 제61조(항공안전 자율보고)를 발췌한 내용이다(시행 2024.1.16).
제61조(항공안전 자율보고) ① 누구든지 제59조제1항에 따른 의무보고 대상 항공안전장애 외의 항공안전장애(이하 “자율보고대상 항공안전장애”라 한다)를 발생시켰거나 발생한 것을 알게 된 경우 또는 항공안전위해요인이 발생한 것을 알게 되거나 발생이 의심되는 경우에는 국토교통부령으로 정하는 바에 따라 그 사실을 국토교통부장관에게 보고할 수 있다.
② 국토교통부장관은 제1항에 따른 보고(이하 “항공안전 자율보고”라 한다)를 통하여 접수한 내용을 이 법에 따른 경우를 제외하고는 제3자에게 제공하거나 일반에게 공개해서는 아니 된다.
③ 누구든지 항공안전 자율보고를 한 사람에 대하여 이를 이유로 해고ㆍ전보ㆍ징계ㆍ부당한 대우 또는 그 밖에 신분이나 처우와 관련하여 불이익한 조치를 해서는 아니 된다.
④ 국토교통부장관은 자율보고대상 항공안전장애 또는 항공안전위해요인을 발생시킨 사람이 그 발생일부터 10일 이내에 항공안전 자율보고를 한 경우에는 고의 또는 중대한 과실로 발생시킨 경우에 해당하지 아니하면 이 법 및 「공항시설법」에 따른 처분을 하여서는 아니 된다.
⑤ 제1항부터 제4항까지에서 규정한 사항 외에 항공안전 자율보고에 포함되어야 할 사항, 보고 방법 및 절차 등은 국토교통부령으로 정한다.
(1) 조종간이나 필수 계기를 작동하기 위해 back-up source(예를 들어 battery, auxiliary power unit, 혹은 air-driven generator)로 구동되는 emergency bus를 계속하여 사용해야 하는 경우.
(2) 조종면을 움직이기 위해 유일한 유압(혹은 기계) 시스템을 계속하여 의존해야 하는 경우.
(3) 두 개 이상의 엔진에서 발생하는 출력(혹은 추력)의 지속적 손실.
(4) emergency egress system을 사용하는 대피.
※ 다음은 항공안전법 시행규칙 별표 2 항공기준사고의 범위를 발췌한 내용이다(시행 2024.3.13).
1. 항공기의 위치, 속도 및 거리가 다른 항공기와 충돌위험이 있었던 것으로 판단되는 근접비행이 발생한 경우(다른 항공기와의 거리가 500피트 미만으로 근접하였던 경우를 말한다) 또는 경미한 충돌이 있었으나 안전하게 착륙한 경우
2. 항공기가 정상적인 비행 중 지표, 수면 또는 그 밖의 장애물과의 충돌(Controlled Flight into Terrain)을 가까스로 회피한 경우
3. 항공기, 차량, 사람 등이 허가 없이 또는 잘못된 허가로 항공기 이륙ㆍ착륙을 위해 지정된 보호구역에 진입하여 다른 항공기와의 충돌을 가까스로 회피한 경우
4. 항공기가 다음 각 목의 장소에서 이륙하거나 이륙을 포기한 경우 또는 착륙하거나 착륙을 시도한 경우
가. 폐쇄된 활주로 또는 다른 항공기가 사용 중인 활주로
나. 허가 받지 않은 활주로
다. 유도로(헬리콥터가 허가를 받고 이륙하거나 이륙을 포기한 경우 또는 착륙하거나 착륙을 시도한 경우는 제외한다)
라. 도로 등 착륙을 의도하지 않은 장소
5. 항공기가 이륙ㆍ착륙 중 활주로 시단(始端)에 못 미치거나(Undershooting) 또는 종단(終端)을 초과한 경우(Overrunning) 또는 활주로 옆으로 이탈한 경우(다만, 항공안전장애에 해당하는 사항은 제외한다)
6. 항공기가 이륙 또는 초기 상승 중 규정된 성능에 도달하지 못한 경우
7. 비행 중 운항승무원이 신체, 심리, 정신 등의 영향으로 조종업무를 정상적으로 수행할 수 없는 경우(Pilot Incapacitation)
8. 조종사가 연료량 또는 연료배분 이상으로 비상선언을 한 경우(연료의 불충분, 소진, 누유 등으로 인한 결핍 또는 사용가능한 연료를 사용할 수 없는 경우를 말한다)
9. 항공기 시스템의 고장, 항공기 동력 또는 추진력의 손실, 기상 이상, 항공기 운용한계의 초과 등으로 조종상의 어려움(Difficulties in Controlling)이 발생했거나 발생할 수 있었던 경우
10. 다음 각 목에 따라 항공기에 중대한 손상이 발견된 경우(항공기사고로 분류된 경우는 제외한다)
가. 항공기가 지상에서 운항 중 다른 항공기나 장애물, 차량, 장비 또는 동물과 접촉ㆍ충돌
나. 비행 중 조류(鳥類), 우박, 그 밖의 물체와 충돌 또는 기상 이상 등
다. 항공기 이륙ㆍ착륙 중 날개, 발동기 또는 동체와 지면의 접촉ㆍ충돌 또는 끌림(dragging). 다만, 꼬리 스키드(tail skid: 항공기 꼬리 아래 장착되는, 지면 접촉 시 기체 손상 방지장치)의 경미한 접촉 등 항공기 이륙ㆍ착륙에 지장이 없는 경우는 제외한다.
라. 착륙바퀴가 완전히 펴지지 않거나 올려진 상태로 착륙한 경우
11. 비행 중 운항승무원이 비상용 산소 또는 산소마스크를 사용해야 하는 상황이 발생한 경우
12. 운항 중 항공기 구조상의 결함(Aircraft Structural Failure)이 발생한 경우 또는 터빈발동기의 내부 부품이 외부로 떨어져 나간 경우를 포함하여 터빈발동기의 내부 부품이 분해된 경우(항공기사고로 분류된 경우는 제외한다)
13. 운항 중 발동기에서 화재가 발생하거나 조종실, 객실이나 화물칸에서 화재ㆍ연기가 발생한 경우(소화기를 사용하여 진화한 경우를 포함한다)
14. 비행 중 비행 유도(Flight Guidance) 및 항행(Navigation)에 필요한 다중(多衆)시스템(Redundancy System) 중 2개 이상의 고장으로 항행에 지장을 준 경우
15. 비행 중 2개 이상의 항공기 시스템 고장이 동시에 발생하여 비행에 심각한 영향을 미치는 경우
16. 운항 중 비의도적으로 항공기 외부의 인양물이나 탑재물이 항공기로부터 분리된 경우 또는 비상조치를 위해 의도적으로 항공기 외부의 인양물이나 탑재물이 항공기로부터 분리한 경우
b. Manner of Notification.
1. 운영자가 NTSB에 가장 빠르게 통지하는 방법은 상황에 따라 달라진다.
(a) 전화 통지.
(b) 전신 통지.
(c) FAA에 통지.
c. Items to be Included in Notification. 위에서 요구하는 통지에는 다음 정보가 포함되어야 한다:
1. 항공기의 형식, 국적, 그리고 등록기호.
2. 항공기의 소유자와 운영자의 이름.
3. PIC의 이름.
4. 사고나 준사고의 날짜 및 시간.
5. 항공기 출항 지점 및 착륙 예정 지점.
6. 항공기 위치.
7. 탑승자 수, 사망자 수, 그리고 중상자 수.
8. 사고나 준사고의 성격, 기상, 그리고 항공기의 손상 정도.
9. 탑재된 폭발물, 방사성 물질, 혹은 기타 위험 물질에 대한 설명.
d. Follow-up Reports.
1. 운영자는 NTSB Form 6120.1이나 6120.2에 따라 보고서를 제출해야 한다:
(a) 사고 발생 후 10일 이내에.
(b) 7일 후에도 overdue aircraft가 여전히 실종된 상태인 경우.
(c) 통보를 필요로 하는 준사고의 경우(subparagraph a(1)) NTSB의 대리인이 보고서를 요청하는 경우에만 이를 제출해야 한다.
2. 보고서 제출 시 신체적으로 가능하다면 사고나 준사고와 관련된 사실, 조건, 그리고 상황을 기재한 진술서를 첨부해야 한다. 만약 신체적으로 불가능하다면 빠른 시일 내에 진술서를 제출해야 한다.
e. Where to File the Reports.
1. 항공기의 운영자는 사고나 준사고의 발생지점으로부터 가장 가까운 NTSB Field Office에 보고서를 제출해야 한다.
a. Purpose and Data Uses. NMAC(Near Midair Collision) Reporting Program의 주요 목적은 NAS의 안전성과 효율성을 향상시키는데 사용되는 정보를 제공하기 위함이다. FAA는 서비스 품질을 개선하기 위해, 그리고 NMAC을 줄이기 위한 프로그램∙정책∙절차를 개발하기 위해 NMAC report로부터 얻은 데이터를 사용한다. 모든 NMAC reports는 Flight Standards Facilities로부터 철저하게 조사된다. 이러한 조사 데이터는 FAA 본부로 전달되어 취합 및 분석된 후 안전프로그램 및 권장 사항으로 개발된다.
b. Definition. 근공중충돌(near midair collision)은 다른 항공기와 500ft 미만으로 근접하여 충돌 가능성이 발생한 경우, 혹은 두 대 이상의 항공기간에 충돌 위험이 존재했었다는 조종사의 보고가 접수된 경우를 의미한다.
c. Reporting Responsibility. 조종사는 근공중충돌이 실제로 발생하였는지의 여부를 판단할, 그리고 만약 그러하다면 NMAC report를 보고할 책임을 가지고 있다. ATC 보고 시 조종사는 구체적으로 “I wish to report a near midair collision”이라 명시해야 한다.
d. Where to File Reports. NMAC 준사고에 연루된 조종사는 이를 즉시 보고하도록 권장된다:
1. FAA ATC facility나 FSS에 라디오로(혹은 전화로) 보고한다.
2. FSDO(Flight Standards District Office)에 서면으로 보고한다.
e. Items to be Reported.
1. 준사고의 날짜 및 시간(UTC).
2. 준사고의 위치 및 고도.
3. 보고 항공기의 식별부호 및 형식, 목적지, 조종사의 이름과 홈베이스.
4. 다른 항공기의 식별부호 및 형식, 목적지, 조종사의 이름과 홈베이스.
5. 비행 계획서의 형식. 사용하였던 station altimeter setting.
6. 해당 altitude/flight level에서의 기상 조건.
7. 두 항공기의 대략적인 경로: 하나의 항공기가, 혹은 두 항공기가 상승/하강 도중이었다면 이를 나타낸다.
8. 최초 확인 시 거리간격, 가장 가까운 지점에서의 근접 거리, 그리고 회피 기동을 수행하기 전까지 시야에 포착된 시간.
9. 수행된 회피 기동의 수준(가능한 경우 두 항공기 모두).
10. 부상자의 수.
f. Investigation. 준사고가 발생한 지역의 FSDO가 NMAC에 대한 조사 및 보고를 담당한다.
g. 조사 도중 레이더, 교신, 그리고 기상 데이터가 검토된다. 가능하다면 모든 조종실 승무원들을 대상으로 NMAC 준사고와 관련된 면담이 수행된다. 연관된 항공기들 중 한 대 이상이 ATC 서비스를 제공받고 있었다면 관제사와의 면담도 수행된다. 비행 절차와 ATC 절차도 평가된다. 조사 결과 FAA 규정을 위반한 것으로 드러나면 법률 집행이 이루어진다.
a. UFO/unexplained phenomena activity를 신고하고자 하는 사람은 UFO/unexplained phenomena reporting data collection center(예를 들어 National UFO Reporting Center 등등)에 문의해야 한다.
b. 생명이나 재산이 위험에 처할 수 있다고 우려된다면 해당 활동을 법 집행 기관에 신고한다.
7-7-5. Safety Alerts For Operators (SAFO) and Information For Operators (InFO)
a. SAFO는 종종 시간을 다투는 중요한 안전 정보를 포함한다. SAFO에는 각 운영자나 당사자가 취해야 할 정보 및/혹은 권장 조치가 포함될 수 있다. SAFO의 대상은 각 주제에 따라 다르며 다음을 포함할 수 있다: Air carrier certificate holders, air operator certificate holders, general aviation operators, directors of safety, directors of operations, directors of maintenance, fractional ownership program managers, training center managers, accountable managers at repair stations, 그리고 other parties as applicable.
b. InFO는 SAFO와 유사하다. 허나 여기에는 안전에 대한 긴급성이나 그 영향이 상대적으로 적은 행정상 조건이나 특정 규제 사항을 충족하는데 도움이 되는 정보를 포함한다.
c. SAFO와 InFO 시스템은 운영자들에게 해당 정보를 신속하게 배포할 수 있는 수단을 제공한다. 이는 FAA 웹사이트에서 확인할 수 있다.
b. 이는 모든 조종사의 높은 비행 숙련도를 위해선 지속적인 재교육이 필요하다는 점을 지적한다. Aviation Safety Program은 항공 안전을 향상하기 위한 노력의 일환이다.
c. Alertness. 항상 경계를 늦추지 않는다(특히 기상이 좋을 때). 대부분의 조종사는 full IFR weather conditions를 운영할 때 본인의 업무에 집중한다. 허나 이상하게도 공중 충돌은 항상 이상적인 기상 조건에서 발생하였다. 훌륭한 시정이 안도감을 조장하는 것으로 보인다. 비록 관제사의 업무로 인하여 조종사가 개별 서비스를 받지 못할 수도 있지만 terminal area에서 발부되는 advisories를 청취함으로써 가치 있는 정보를 얻을 수 있다.
d. Giving Way. 다른 항적이 너무 가깝다고 생각되는 경우에는 상대방의 양보를 기다리지 말고 먼저 양보한다.