Normal and Crosswind Takeoff and Climb
이륙 전 안전 브리핑과 before takeoff checklist를 완료한 후, 그리고 ATC clearance를 받은 후(만약 해당한다면) 조종사는 접근 중인 항공기가 있는지 확인한 뒤 활주로 중심선에 정렬해야 한다. 관제탑이 운영되지 않은 공항에서 출항할 경우 조종사는 라디오 주파수를 통해 항적을 꼼꼼히 확인해야 한다. 그리고 활주로에 진입하기 전에 radio advisory를 전송해야 한다. 급선회를 하여 활주로에 진입한 뒤 rolling takeoff를 하는 것은 좋은 운영 관행이 아니다. 또한 이는 fuel tank pickup을 “unporting”할 수 있기 때문에 AFM/POH에 의해 금지될 수 있다. 특정 연료 양 이하라면 AFM/POH에 의해 이륙 자체가 금지될 수 있다. 만약 측풍이 존재한다면 조종간을 측풍을 향하여야 한다. 외부 등화들(landing and taxi lights)과 wingtip strobes는 낮이건 밤이건 takeoff roll을 시작하기 전에 즉시 켜야 한다. 이륙 지점에서 대기해야 하는 경우 조종사는 그 위치로 이동하는 동안 모든 외부 등화를 켜야 한다(특히 야간에).
AFM/POH 권장하는 값으로 이륙 출력을 세팅해야 한다. aspirated(non-turbocharged) engines의 경우 이는 보통 full throttle이다. full throttle은 또한 대부분의 turbocharged engines에서 사용된다. 그러나 일부 turbocharged engines의 경우 조종사가 특정한 출력 세팅을 설정하길 요구한다. 이는 보통 manifold pressure의 red line 바로 아래이다. 이는 full throttle보다는 낮은 이륙 출력을 만들어낸다. turbocharged engines는 보통 특별한 고려 사항을 필요로 한다. turbocharged engines의 throttle 움직임은 특별히 부드럽고 신중해야 한다. throttle을 증가시킬 때 브레이크를 사용하여 항공기를 제 자리에 고정하는 것이 허용된다(심지어 바람직할 수도 있다). 보통 turbocharger에서 상당한 부스트가 발생한 이후에 브레이크를 놓는다. 이는 느린 throttle 증가로 인한 활주로 낭비를 막는다. 만약 활주로 길이, 혹은 장애물 회피가 중요하다면 성능 차트에 명시된 대로 브레이크를 놓기 전에 최대 출력을 적용해야 한다. 정속 프로펠러를 장착한 모든 비행기는 브레이크를 놓기 전에 엔진을 최대 rpm으로 회전하도록, 그리고 최대 엔진 출력을 만들어내도록 할 수 있다. 비록 회전 당 공기의 질량은 적지만 rpm이 높아지고 프로펠러 추력이 최대화된다. 추력은 takeoff roll 시작 시 최대이며 이후 비행기 속도가 증가함에 따라 감소한다. 이륙 도중 높은 slipstream 속도는 프로펠러 뒤에 놓인 날개의 실질적인 양력을 증가시킨다.
이륙 출력이 설정되면 일단 활주로 중심선을 따르는 것, 그리고 엔진 계기들을 확인하는 것에 주의를 분산해야 한다. 많은 초보 다발 비행기 조종사는 takeoff roll이 시작되자마자 속도계에 fixate 되려는 경향이 있다. 그러기보다 조종사는 양 쪽 엔진이 최대 manifold pressure와 rpm을 만들어내는지를 확인해야 한다. 또한 fuel flows, fuel pressures, EGTs(exhaust gas temperatures), oil pressure들이 정상 범위에 있는지를 확인해야 한다. 비행기가 rotation speed에 근접하기 훨씬 전에 이러한 스캔을 완료할 수 있다. 만약 측풍이 존재한다면 항공기가 가속함에 따라 측풍으로 향한 aileron이 줄어들 수 있다. elevator/stabilator는 내내 neutral로 유지되어야 한다.
모든 이륙에는 최대 이륙 출력이 사용되어야 한다. 부분적인 출력을 이용한 이륙은 권장되지 않는다. 부분적인 출력을 통해 현대의 왕복 엔진 수명이 연장된다는 증거는 없다. 실제로는 부분적인 출력을 사용했을 때 과도한 열과 엔진 마모가 발생할 수 있다. 왜냐하면 이륙 도중 엔진 냉각에 필수적인 over-rich mixture가 fuel metering system을 통해 공급되지 못하기 때문이다.
다발 비행기에서 이륙 및 상승 도중 주의해야 할 몇 가지 중요한 속도들이 있다. 고려해야 할 첫 번째 속도는 VMC이다. 비행기가 지상에 있을 때 VMC 미만에서 엔진이 고장 났다면 이륙을 중단해야 한다. 즉각적으로 양 쪽 throttle을 닫고 필요에 따라 rudder와 브레이크를 사용하여 방향 제어를 유지할 수 있다. 공중에 있을 때 VMC 미만에서 엔진이 고장 날 경우 이륙 출력을 생산하는 남은 엔진으론 방향 제어를 할 수 없다. 따라서 비행기는 VMC를 초과하기 전까지는 절대 이륙해서는 안 된다. 조종사는 제조업체가 권장하는 rotation speed (VR), 혹은 lift-off speed(VLOF)를 사용해야 한다. 이러한 속도가 게재되지 않았다면 VMC 속도에 5노트를 더한 값이 VR로 사용되어야 한다.
이륙 pitch 자세로의 rotation은 부드러운 조종간 입력으로 수행된다. 측풍이 있으면 side drift가 존재하기 때문에 조종사는 항공기가 이륙한 후에 landing gear가 순간적으로 활주로에 닿지 않도록 해야 한다. 이러한 상황에서는 rotation을 보다 적극적으로, 그리고/혹은 더 높은 속도에서 수행할 수 있다. 그러나 accelerate-stop distance, takeoff ground roll, distance to clear an obstacle을 위한 AFM/POH 성능 수치들은 권장된 VR이나 VLOF에서 계산되었음을 조종사는 반드시 유념해야 한다.
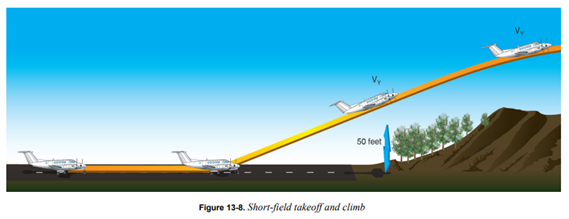
이륙한 이후의 고려사항은 가능한 한 빠르게 고도를 얻는 것이다. 일부 AFM/POH는 이륙과 초기 상승에 대해 조종사에게 도움을 주기 위해 “50-foot”, 혹은 “50-foot barrier” speed를 제공한다. 이는 rotation, lift-off, 그리고 VY로의 가속 도중 목표로 하는 속도로 사용된다. 이륙 전에 조종사는 지상으로부터 50ft(AGL)까지의 takeoff distance와 50ft AGL에서의 stopping distance를 확인하고 이 둘을 더해야 한다. 만약 활주로가 총합보다 짧다면 엔진 고장 시 활주로를 벗어나 착륙할 가능성이 매우 높다. 지면을 떠난 이후에는 과도한 속도를 얻는 것보다 고도를 얻는 것이 더 중요하다. 엔진 고장 시 과도한 속도를 고도로 효율적으로 전환할 수 없음이 입증되었다. 추가적인 고도는 상승 도중 항공기의 이상이나 비상 상황을 인지하고 대응하는데 사용할 수 있는 시간을 증가시킨다.
과도한 상승 자세는 과도한 속도만큼이나 위험할 수 있다. 가파른 상승 자세는 전방 시야를 제한한다. 또한 조종사가 다른 항적을 확인하고 피할 능력을 방해한다. VY(best all-engine rate-of-climb speed)를 얻기 위해 비행기는 얕은 상승으로 가속되어야 한다. 그런 다음 지형과 장애물을 고려한 safe single-engine maneuvering altitude에 도달하기 전까지 VY를 유지한다. VY보다 높거나 낮은 속도는 비행기의 성능을 저하한다. 이륙 후 initial climb 도중 지형 및 장애물의 회피는 중요한 비행 전 고려사항이다(심지어 모든 엔진이 정상적으로 작동하더라도). 대부분의 항공사와 대부분의 터빈 비행기는 보통 FMS(flight management system)를 사용하여 VY(best rate of climb)를 만들어내는 자세로 상승한다.
이륙 후 landing gear를 올리는 시기는 몇 가지 요인에 따라 달라진다. 일반적으로 gear는 착륙을 위한 활주로가 충분하지 않을 때, 그리고 고도계에 positive rate of climb가 만들어졌을 때 올려야 한다. 착륙을 위한 활주로가 많이 남아 있어서 장시간 동안 landing gear를 내려놓을 경우 상승 성능과 가속이 희생된다. 이는 신중하지 못할 것이다. 활주로에 착륙이 이루어질 수 없는 시점을 지난 후에도 gear를 내려두는 것은 위험하다. 높은 밀도 고도를 운영하는 일부 다발 비행기의 경우 landing gear가 내려진 상태에서는 positive rate of climb가 불가능하다. 이러한 상황에서 positive rate of climb를 기다리는 것은 실행 가능하지 않다. 기억해야 할 중요한 것은 이륙 후 엔진 고장이 발생한 경우 landing gear를 가능한 한 빠르게 올린다면 항력이 급격히 감소하고 상승 성능이 상당히 증가한다는 것이다. 또한 기억해야 할 중요한 점은 활주에 착륙하거나 overrun을 하기 위해서는 gear를 내려두는 것이 gear를 올린 상태로 착륙하는 것보다 훨씬 나은 선택이라는 것이다. 일반적인 권장사항은 VYSE 속도를 넘기 전에 landing gear를 올리는 것이다. gear가 올라갔고 상승 성능이 충분하다면 계속하여 진행한다. 일부 AFM/POH는 바퀴의 회전을 멈추기 위하여 이륙 후 landing gear를 올리기 전에 순간적으로 wheel brake를 적용하도록 지시한다. 만약 이륙을 위해 flap이 extend 되어 있다면 AFM/POH에서 권장하는 대로 flap을 retract 해야 한다.
safe single-engine maneuvering altitude(일반적으로 최소 400~500ft AGL)에 도달하면 en route climb speed로 전환해야 한다. 이 속도는 VY보다 높으며 보통 순항 고도까지 유지된다. en route climb speed는 더 좋은 시정, 더 좋은 엔진 냉각, 더 높은 groundspeed를 제공한다. 원한다면 en route climb speed로 전환하는 동안 이륙 출력을 줄일 수 있다.
일부 비행기들의 AFM/POH에는 권장사항으로(혹은 때때로 제한 사항으로) 게재된 상승 출력 세팅이 있다. 이는 en route climb를 위해 설정되어야 한다. 만약 상승 출력 세팅이 게재되어있지 않다면 en route climb를 위해 manifold pressure와 rpm을 다소 낮추는 것이 관례이다(그러나 필요조건은 아님). 일반적으로 첫 출력 감소 이후에 프로펠러들을 synchronize 한다. 만약 yaw damper가 설치되었다면 이를 작동시킨다. 또한 AFM/POH는 상승 도중 mixture를 lean 하라고 권장할 수 있다. 항적과 업무량이 허락된다면 climb checklist를 수행해야 한다. [그림 13-7]