Flight Control Malfunction/Failure
Total Flap Failure
wing flaps를 연장할 수 없는 경우 no-flap 접근 및 착륙이 필요하다. light airplanes의 경우 no-flap 접근 및 착륙은 특별히 어렵거나 위험하지 않다. 그러나 이러한 기동을 수행할 때 고려해야 할 특정 요소가 있다. no-flap 착륙은 상당히 긴 활주로를 필요로 한다. 필요한 착륙 거리의 증가는 최대 50%가 될 수 있다.
wing flaps를 올린 상태로 장주 패턴을 비행하는 경우 고도 유지를 위해선 비행기가 상대적으로 nose-high attitude이어야 한다(flaps가 연장된 비행 상태와 비교하였을 때). 플랩의 항력 이점 없이 고도를 줄이는 것은 문제가 될 수 있다. 고도를 줄이기 위해 급강하할 필요성을 없애려면(또한 이는 그 결과 과도한 증속으로 이어짐) 더 넓고 더 긴 장주 패턴이 필요할 수 있다.
플랩이 올라간 상태에서 착륙을 위해 출력을 줄임에 따라 비행기는 pitch 축과 roll 축에 대해 덜 안정적이게 된다. 플랩이 없다면 비행기는 roundout 도중 상당히 float 하려는 경향이 있다. 조종사는 지나치게 빠른 속도에서 비행기를 활주로에 강제로 착륙시키려는 유혹을 피해야 한다. 플랩이 없기 때문에 과도하게 flare하려 해서도 안 된다. 이는 꼬리가 활주로에 부딪히게 만들 수 있기 때문이다.
Asymmetric(Split) Flap
asymmetric “split” flap은 하나의 플랩이 올라가거나, 혹은 내려가는 반면 반대쪽 플랩은 제자리에 유지되는 상황이다. 이러한 문제는 wing flaps가 올라갈/내려갈 때 flap deflection이 더 적은 날개 쪽으로 확연한 roll이 발생하는 것으로 나타난다.
split flap 상황에서 마주하는 roll은 반대쪽 aileron을 통해 상충된다. 플랩 연장으로 인해 발생한 항력은 yaw를 발생시킨다. 이는 상당한 반대쪽 rudder를 필요로 하여 그 결과 cross-control condition을 만들어낸다. 날개 수평 자세를 유지하기 위해서는 거의 full aileron이 필요할 수 있다(특히 접근 및 착륙을 위해 속도가 감속된 경우). 조종사는 플랩이 연장된 측면 쪽에서 측풍이 부는 경우 착륙을 시도해서는 안 된다. 왜냐하면 측풍 보상을 위해 필요한 roll control 여유가 없을 수 있기 때문이다.
spilt flap 상황에서의 접근 및 착륙 도중에는 정상 속도보다 높은 속도가 필요하다. 조종사는 과도한 flare로 인한 비대칭 실속, 그리고 이후의 제어 상실 위험을 무릅쓰지 않아야 한다. 차라리 flaps-up 실속 속도 이상의 안전 여유를 둔 속도에서 착륙이 발생하도록 비행해야 한다.
Loss of Elevator Control
많은 비행기에서 elevator는 두 개의 케이블로 제어된다: “down” cable과 “up” cable. 일반적으로 이러한 케이블 중 하나만 고장 나거나, 혹은 끊어진 경우 elevator 제어가 완전히 상실되는 것은 아니다. 대부분의 비행기에서 케이블이 고장 나면 pitch 제어의 일부가 손실된다. “up” elevator cable이 고장 난 경우(“down” elevator는 손상되지 않고 제대로 기능) 조종간이 쉽게 뒤로 움직여지긴 하나 반응이 발생하지는 않는다. 그러나 neutral position 너머의 조종간 전방 움직임은 nose-down attitude를 만들어낸다. 반대로 “down” elevator cable이 고장 난 경우 조종간을 전방으로 움직였을 시 반응이 발생하지 않는다. 그러나 조종사는 조종간을 뒤로 움직임으로써 pitch attitude를 일부 제어할 수 있다.
up-elevator control이 안 되는 경우 조종사는 다음을 통해 pitch 제어를 유지할 수 있다:
∙상당한 nose-up trim을 적용한다.
∙원하는 자세를 만들고 이를 유지하기 위해 조종간을 앞으로 민다.
∙기수를 낮추기 위해선 전방 압력을 증가시킨다. 기수를 들기 위해선 전방 압력을 풀어준다.
∙착륙을 위한 flare 도중에는 전방 압력을 풀어준다.
down-elevator control이 안 되는 경우 조종사는 다음을 통해 pitch 제어를 유지할 수 있다:
∙상당한 nose-down trim을 적용한다.
∙원하는 자세를 만들고 이를 유지하기 위해 조종간을 뒤로 당긴다.
∙기수를 낮추기 위해선 후방 압력을 풀어준다. 기수를 들이 위해선 후방 압력을 증가시킨다.
∙착륙을 위한 flare 도중에는 후방 압력을 증가한다.
trim 메커니즘은 비행 중 primary control 고장 발생 시 유용할 수 있다. 예를 들어 비행 중 객실과 elevator 사이의 연결 고장이 발생한 경우 elevator가 바람을 향해 자유롭게 weathervane 하도록 둔다. 이때 trim tabs를 사용하여 제한 범위 이내로 elevator를 올리거나 내릴 수 있다. trim tabs는 저속과 같은 상황에서는 일반적인 조종간 제어만큼 효과적이지 않다. 그러나 안전한 착륙을 가능하게 할 정도의 긍정적인 효과는 가진다.
elevator가 움직이지 못하게 되어 elevator control 제어가 완전히 상실된 경우 출력, 그리고 flap 연장의 다양한 조합이 어느 정도 pitch control을 제공한다. 그러나 이러한 상황에서는 성공적 착륙이 문제가 될 수 있다.
Landing Gear Malfunction
landing gear가 제대로 작동하지 않음을 확인한 다음 AFM/POH에 포함된 gear 연장을 위한 대체 방법을 사용하여도 gear에 반응이 없다면 gear-up landing이 불가피하다고 간주된다. 조종사는 가능하다면 crash and rescue facilities가 있는 공항을 선택해야 한다. 조종사는 비상 장비를 대기시키는 요청을 해야 한다.
착륙 표면을 선택할 때는 보통 매끄럽고 단단한 표면이 거칠고 개량되지 않은 잔디보다는 손상을 덜 야기한다는 것을 고려해야 한다. 그러나 단단한 표면은 연료 점화를 발생시킬 수 있는 불꽃을 만들어낸다. 조종사는 활주로 표면이 foam 되도록 요청할 수 있다(만약 공항에 이러한 장비를 가지는 경우). 조종사는 남은 연료를 연소시키는 것을 고려해야 한다. 이는 착륙 속도의 감소, 그리고 화재 가능성을 줄여준다.
landing gear 고장이 하나의 main landing gear leg로 제한되는 경우 최대한 그쪽 날개의 연료를 많이 소비하여 그 무게를 줄여야 한다. 무게의 감소는 landing roll 도중 그쪽 날개가 표면에 닿는 것을 최대한 지연시키게 해준다. 충격 속도가 감소하면 손상이 줄어든다.
한 쪽 landing gear leg가 연장되지 않는 경우 사용 가능한 gear legs로 착륙하거나, 혹은 gear legs를 올린 상태로 착륙할 수 있다. 하나의 main gear로 착륙하면 보통 착륙 이후 고장 난 gear leg가 있는 방향으로 강하게 틀어진다. 착륙 활주로가 좁거나, 혹은 활주로 가장자리에 도랑과 장애물이 있는 경우에는 착륙 후 최대의 방향 제어가 필요하다. 이러한 상황에서는 세 개의 기어를 모두 올린 상태에서 착지하는 것이 가장 안전한 조치일 수 있다.
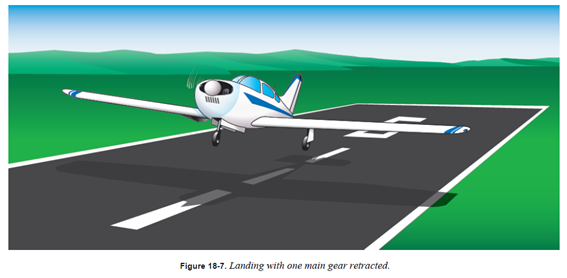
한쪽 main gear를 올린 상태에서(반대편 main gear, 그리고 nose gear는 내려진 상태) 착륙하기로 결정한 경우 날개 수평 상태에서 nose-high attitude로 착지가 이루어져야 한다. 속도가 감소함에 따라 main gear가 없는 쪽 날개가 최대한 떠있는 상태를 유지하기 위해 필요한 aileron 조작을 적용해야 한다. [그림 18-7] 날개가 지면에 닿으면 그 방향을 향해 발생하는 강한 yaw를 예상할 수 있다. 방향 제어를 어느 정도 유지하기 위해선 full opposite rudder와 적극적인 제동을 사용할 준비가 되어 있어야 한다.
nose-wheel이 올라간 상태에서(main gear는 연장된 상태) 착륙할 때 조종사는 거의 full up-elevator가 적용될 때까지 기수를 지면으로부터 떨어트려야 한다. [그림 18-8] 그 다음 기수가 지면을 향해 천천히 안착하도록 back pressure를 풀어주어야 한다. full up-elevator를 유지하게 되면 속도 감소에 따라 기수가 갑자기 지면으로 떨어져 burrowing, 혹은 추가적 손상을 초래할 수 있다. landing roll 도중 브레이크 압력을 가해서는 안 된다(단, 장애물과의 충돌 회피를 위해 적대적으로 필요한 경우 제외).

nose gear만 연장된 상태에서 착륙하는 경우 nose-high attitude에서 동체 구조의 뒷부분이 닿도록 해야 한다. 이러한 절차는 porpoising, 혹은 wheelbarrowing을 방지하는데 도움이 된다. 그런 다음 nose-wheel이 점진적으로 착지하도록 만든 뒤 필요에 따라 방향 제어를 위해 nose-wheel steering을 사용한다.
'Airplane Flying Handbook(2021) > 18: Emergency Procedures' 카테고리의 다른 글
| (6) Emergency Descents (0) | 2022.12.27 |
|---|---|
| (7) In-Flight Fire (0) | 2022.12.27 |
| (9) System Malfunctions (1) | 2022.12.27 |
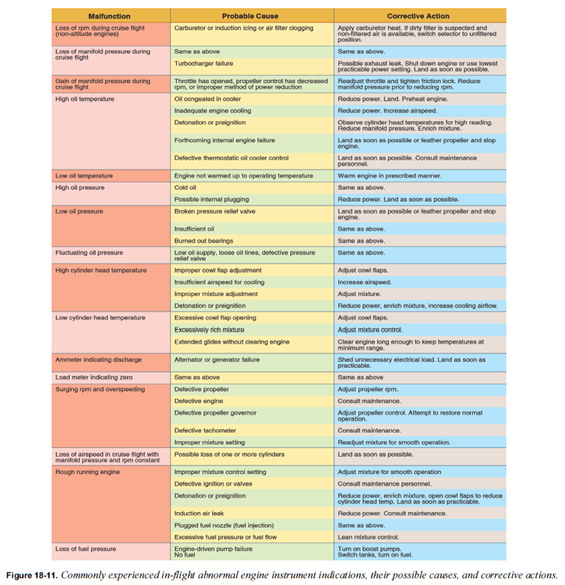
| (10) Abnormal Engine Instrument Indication (0) | 2022.12.27 |
| (11) Door Opening In-Flight (2) | 2022.12.27 |