Stalls
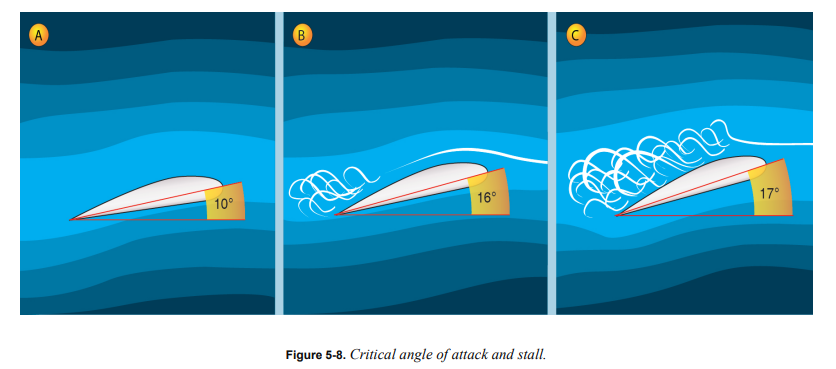
실속이란 날개 위의 부드러운 공기 흐름이 방해를 받아 양력이 손실될 때 발생하는 공기역학적 상태이다. 구체적으로 실속은 받음각(날개의 시위선과 상대풍이 이루는 각도)이 날개의 임계 받음각을 초과할 때 발생한다. 어떤 속도에서도, 어떤 자세에서도, 그리고 어떤 출력 설정에서도 임계받음각이 초과될 수 있다. [그림 5-8]
이러한 이유 때문에 실속이 발생할 수 있는 요인과 상황을 이해하는 것, 그리고 실속 인지 및 회복하는 숙련도를 높이는 것이 중요하다. intentional stalls를 수행하면 실속이 발생하는 조건에 익숙해지고, impending stall을 인지하는데 도움을 주며, 적절한 실속 수정 방법이 발달된다. 실속은 두 가지 수준으로 연습된다:
∙Impending Stall – 실속 경고가 발생할 정도로 받음각이 증가하였지만 임계 받음각이 초과되지 않았다면 impendint stall이 발생한다. impending stall의 징후로 buffeting, stick shaker, 혹은 aural warning이 있다.
∙Full Stall – 임계 받음각이 초과되면 full stall이 발생한다. full stall의 징후로 보통 비행기의 기수가 떨어지려는 것을 쉽게 막을 수 없게 되며 rolling motion이 발생할 수 있다. stick pushers를 갖춘 비행기의 경우 이 장치가 활성화되었다면 full stall의 징후를 나타낸다.
실속 회복 도중 고도 손실이 예상되며 그 양은 실속이 진행된 정도에 따라 달라진다. 조종사가 impending stall을 인지하는데 시간이 오래 걸릴수록 full stall이 발생할 가능성이 높아진다. 따라서 intentional stalls는 지상으로부터 충분한 고도에서 수행되어야 한다.
Stall Recognition
조종사는 실속이 발생하기 쉬운 비행 조건을 인지해야 하며 실속 수정을 어떻게 적용하는지 알아야 한다. 이러한 수준의 숙련도에는 impending stall을 시각, 청각, 그리고 촉각으로 인지하는 방법을 배우는 것이 포함된다.
실속 경고 장치를 갖춘 비행기의 경우 실속 발생 시 실속 경고가 발생한다. 이러한 장치에는 청각 경고, 불빛, 혹은 stick shaker가 있다. 이들은 임계 받음각 근접 시 조종사에게 경보를 제공한다. certification standards에 따라 제조업체는 비행기의 고유한 공기역학적 특성(pre-stall buffeting)을 통해, 혹은 stall warning device를 통해 실속 경고가 제공되도록 항공기를 설계할 수 있다.
(ATP: 임계 받음각이 초과되면 항공기는 실속에 빠진다. 받음각은 시위선과 상대풍 사이의 각도로 측정된다. impending stall을 정확하게 경고하기 위해선 stall warning device가 반드시 상대풍을 감지하거나 날개의 압력 분배를 감지해야 한다.)
조종사를 위한 기타 감각 단서들은 다음과 같다:
∙촉각 – 속도가 감소할수록 조종간 압력이 변화하는 것을 느낄 것이다. 원하는 비행기 반응을 얻기 위해선 조종면의 저항이 점차 감소함에 따라 조종간을 더 움직여야 한다. 조종사는 조종간 움직임에 대한 비행기의 반응 시간이 증가하는 것을 느낄 것이다.
∙시각 – 비행기는 어떤 자세에서든 실속에 빠질 수 있다. 따라서 시각은 impending stall을 나타내는 완벽한 지표가 아니다. 허나 pitch를 인지하는 것은 중요하다.
∙청각 – 속도가 감소할 때 조종사는 비행기 구조물을 따라 흐르는 공기의 소리 변화를 알아차려야 한다.
∙운동감각 – 방향이나 속도의 변화에 대한 신체적 감각은 시계 비행 시 중요한 지표가 된다. 이 감각이 제대로 발달되면 impending stall을 알아차릴 수 있다.
AFM에 게재된 수평비행 1G 실속 속도는 다음과 같은 경우에만 유효하다는 것을 기억해야 한다:
1. 비가속 1G 비행 상태일 때
2. 삼타일치 비행 상태일 때
3. 특정 무게일 때(보통 maximum gross weight).
4. 특정 무게중심일 때(보통 maximum forward CG).
Angle of Attack Indicators
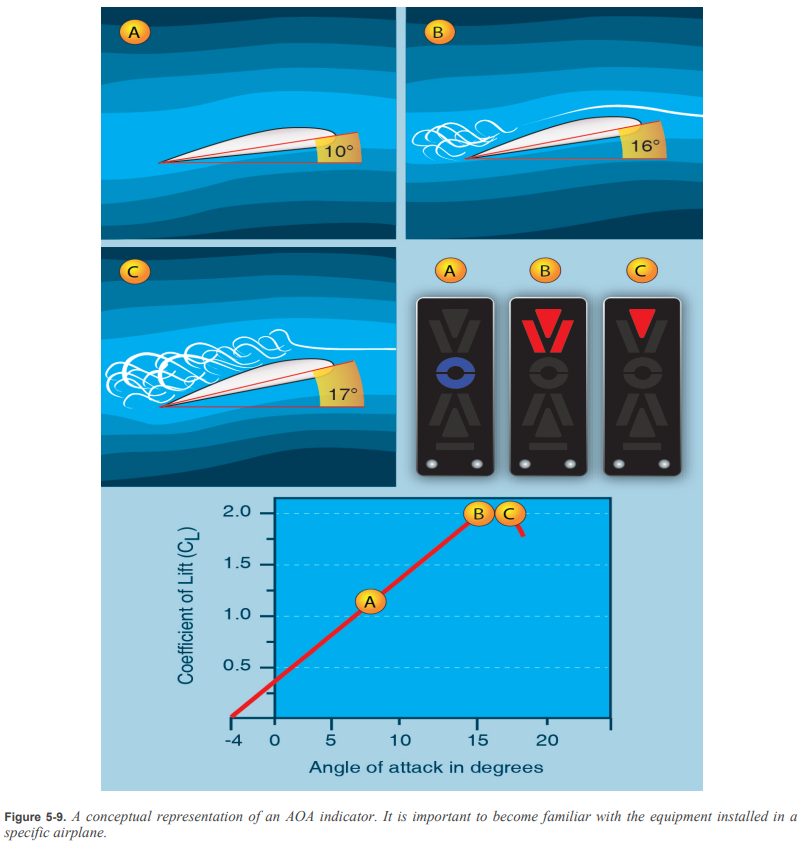
AOA indicator의 목적은 에어포일의 공기역학적 상태와 관련된 조종사의 상황 인식을 개선시키는 것이다. 이를 stall margin awareness라고도 부른다. 간단히 말해 현재 에어포일의 받음각과 임계 받음각 사이에 존재하는 여유를 인지하는 것이다. 받음각 지시계는 비행기가 임계 받음각에 얼마나 근접하였는지에 대해 시각적 지표를 제공한다. FAA는 LOC-I가 발생하는 것을 줄이기 위해 GAJSC(General Aviation Joint Steering Committee)와 함께 받음각 지시계를 홍보하고 있다.
받음각 지시계가 없다면 받음각이란 조종사에게 “보이지 않는" 것이다. 받음각 지시계는 여러 매개 변수들을 동시에 측정하여 현재의 받음각을 결정한다. 이는 조종사에게 현재의 받음각에 대한, 그리고 임계 받음각 근접정도에 대한 시각적 이미지를 제공한다. 이러한 장치들은 비행기의 에너지 관리 상태를 시각적으로 나타낼 수 있다. 비행기의 에너지 상태란 속도, 고도, 항력, 그리고 추력 사이의 균형 상태이며 날개가 얼마나 효율적으로 운영되고 있는지를 나타낸다. 비행기의 에너지 상태와 관련된 상황 인식이 증가함에 따라 조종사는 loss of control을 방지하는데 도움이 되는 추가 정보를 가진다.
받음각 지시계는 범용 항공(General Aviation) 비행기들을 위해 점점 더 저렴해지고 있다. 받음각이 계산되는 방법은 다양하며 여러 종류의 받음각 지시계가 존재한다. 따라서 이러한 장치의 사용 방법에 대한 훈련과 제대로 된 설치가 중요하다. [그림 5-9] 일부 받음각 지시계는 청각 신호도 제공하며 이 덕분에 임계 받음각으로 향하는 받음각 변화를 stall warning systems 이전에 인지할 수 있다. 일부 받음각 지시계는 flap position을 고려하지만 모든 장치가 그렇지는 않다는 점에 유의한다.
받음각 지시계가 현재의 받음각과 임계 받음각 근접 정도를 시각적으로 제공하긴 하지만 한계가 없는 것은 아니다. 이러한 장치를 갖춘 범용 항공 비행기의 운영자는 그 한계를 이해해야 한다. 진보된 자동화 시스템(예를 들어 autopilots와 moving maps)과 마찬가지로 장비를 잘 이해하지 못하거나 오용하면 처참한 결과가 발생할 수 있다. 받음각 지시계의 유효성을 제한할 수 있는 몇 가지 항목은 다음과 같다:
1. Calibration techniques
2. Probes or vanes not being heated
3. The type of indicator itself
4. Flap setting
5. Wing contamination
FAA는 받음각 지시계의 설치 방법을 간소화하였다(범용 항공 비행기의 형식 증명에 받음각 지시계는 필요하지 않음). FAA는 2014년 2월 non-required AOA system에 대한, 이러한 시스템들이 경미한 개조(minor alteration)로 설치될 수 있는 방법에 대한, 그리고 이러한 시스템들의 증명을 위해 따라야 할 절차에 대한 정책을 수립하였다. 이에 대한 최신 정보는 FAA 웹사이트(www.faa.gov.)를 참조한다.
Stall Characteristics
비행기마다 실속 특성이 다를 수 있다. 조종사는 본인이 비행하는 비행기의 실속 특성과 제조업체 권장 회복 절차를 알아야 한다. 비행기의 실속 특성에 영향을 미칠 수 있는 요소로는 기하학적 구조, CG, 날개 설계, 그리고 고양력 장치가 있다. 비행기의 설계는 다양하므로 모든 비행기의 실속 특성을 구체적으로 설명하는 것은 불가능하다. 허나 소형 범용 항공 훈련용 비행기의 경우에는 광범위한 가이드라인을 제시할 수 있을 만큼 유사점이 많다.
대부분의 훈련용 비행기는 실속이 wing roots에서 wingtips로 진행되도록 설계된다. 날개의 바깥쪽 부분이 안쪽보다 약간 낮은 받음각을 갖도록 설계되는 날개도 있다(이를 washout이라 부른다). 이러한 설계는 wingtips가 wing roots보다 낮은 받음각을 갖게 만든다. 이로 인해 비행기의 wing roots는 wingtips보다 먼저 임계 받음각을 초과한다(즉, wing roots가 먼저 실속에 빠진다). 따라서 비행기가 실속 상태일 때 ailerons는 여전히 어느 정도의 조종 효율을 가진다(단, 실속 상태의 공기 흐름이 날개를 따라 바깥쪽으로 이동하기 전까지). 조종사는 받음각을 감소시키기 전에 aileron을 사용하는 것에 주의해야한다. 왜냐하면 이는 실속 상태를 악화시킬 수 있기 때문이다. 예를 들어 비행기가 실속 상태에서 왼쪽으로 roll 하여 조종사가 날개 수평을 만들기 위해 right aileron을 적용하면 왼쪽 날개의 aileron이 아래쪽으로 내려가서 더 큰 받음각이 만들어진다. 이때 임계 받음각이 초과되면 wingtip에서 더 완전한 실속이 발생한다. 이로 인해 날개가 더욱 왼쪽으로 roll 할 수 있으므로 aileron을 적용하기 전에 먼저 받음각을 줄이는 것이 중요하다.

조종사는 실속에 영향을 미치는 요소들이 어떻게 연관되어 있는지도 이해해야 한다. 예를 들어 power-on stall에 비해 power-off stall 도중에는 실속 단서들(buffeting, shaking)이 덜 명확하다. power-off 1G stall 도중에는 elevator control position(full up elevator)과 높은 하강률이 단서가 될 수 있다.
Fundamentals of Stall Recovery
비행기의 복잡성에 따라 실속 회복 절차가 최대 6단계로 구성될 수 있다. impending stall이나 full stall에 대해 가장 중요한 조작은 받음각을 줄이는 것이다. 받음각을 줄이지 않는 대신 출력을 통해 고도를 유지하려는 시도로 인해 loss of control로 이어지는 상황이 수없이 발생했다. 이 장은 범용 항공 항공기를 위한 일반적인 실속 회복 절차를 제공한다. 이 절차는 메이저 비행기 제조업체에서 개발한 템플릿을 개작하였으며 항공기에 따라 적절히 조정될 수 있다. [그림 5-10] 만약 항공기 제조업체에서 권장 절차를 게재하였다면 항상 해당 절차를 따라야 한다.
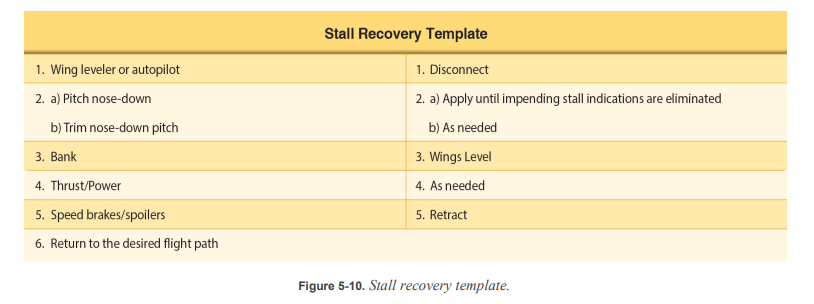
회복은 순서대로 이루어져야 한다. 다음은 이 6단계에 대해 설명한다:
1. wing leveler나 autopilot을 해제한다(단, 만약 장비한 경우). 어떤 상황에서도 회복을 위해선 수동 조작이 필수적이다. 이러한 장비를 즉시 해제해야 조종사가 다음 회복 단계로 빠르게 넘어갈 수 있다. wing leveler나 autopilot이 해제되지 않으면 조종간이나 trim이 의도치 않게 조정될 수 있으며 만약 업무량이 많다면 이러한 상황이 쉽게 인지되지 못할 수 있다.
2. a) pitch nose-down control. 받음각을 줄이는 것은 모든 실속 회복에 매우 중요하다. 받음각을 임계 받음각 미만으로 줄이기 위해 조종간을 앞으로 민다. impending stall의 징후가 사라지면 다음 단계로 넘어간다.
b) Trim nose-down pitch. 필요한 반응이 elevator에서 제공되지 않는다면 pitch trim이 필요할 수 있다. 그러나 pitch trim을 과도하게 사용하면 상황이 악화될 수 있으며 loss of control이나 높은 구조적 하중이 발생할 수도 있다.
3. Roll wings level. 날개를 수평으로 만들면 양력 벡터의 방향이 조정되어서 효과적이 회복이 가능해진다. 받음각을 줄이기 전에 bank angle을 조절하려 시도해서는 안 된다. 실속이 회복되면 roll stability와 roll control이 상당히 향상될 것이다. 또한 실속이 스핀으로 발달하는 것을 방지하기 위해 rudder로 yaw를 적극적으로 막아야 한다.
4. Add thrust/power. 실속은 어떠한 출력 설정이나 어떠한 속도에서도 발생할 수 있으므로 필요하다면 출력을 증가시켜야 한다. 필요하다면 throttle을 빠르고 부드럽게 증가시킨다. 이때 yawing motion과 pitching motion을 막기 위해 rudder와 elevator를 사용한다. 실속 회복 도중 출력을 추가하면 고도 손실이 줄어들긴 하지만 실속이 없어지지는 않는다. 받음각의 감소가 필수적이다. 프로펠러 비행기의 경우 출력이 적용되면 날개 주위의 공기흐름이 증가하며 이는 실속 회복을 돕는다.
5. Retract speedbrakes/spoilers(단, 만약 장비한 경우). 이는 양력과 실속 여유를 증가시킨다.
6. Return to the desired flightpath. 삼타일치가 적용된 부드러운 조종간 움직임을 통해 원하는 비행경로로 되돌아간다. 이때 secondary stall을 방지하기 위해 주의한다. 회복 도중 지형과 근접한 정도를 인지해야 하며 충돌을 피하기 위해 필요한 조작을 수행해야 한다.
위의 절차는 항공기 형식에 따라 개작될 수 있다. 예를 들어 autopilot이 없는 단발 훈련용 비행기의 경우 6단계 중 네 단계만이 사용될 가능성이 높다. 첫 번째 단계는 실속 경고가 없어질 때까지 받음각을 줄이는 것이다. 훈련용 비행기에서는 pitch trim을 사용하는 것을 크게 고려하지 않아도 된다. 왜냐하면 이러한 비행기에서는 대부분의 조종사들이 trim을 힘으로 제압할 수 있기 때문이다. 부적절한 trim은 적절한 비행경로로 되돌아갈 때 수정될 수 있다. 다음 단계는 삼타일치를 유지하면서 필요에 따라 출력을 추가하는 것이다. 비행기에 speedbrakes나 spoilers가 없다면 이 단계도 건너뛴다. 원하는 비행경로로 돌아오면 회복이 완료된다.
Stall Training
power-on stall과 power-off stall을 모두 연습하는 것이 중요하다. 왜냐하면 이들은 정상 비행 도중 발생할 수 있는 실속 상황을 시뮬레이션하기 때문이다. 조종사는 실속이 발생할 수 있는 비행 시나리오를 이해해야 한다. 보통 저고도에서 의도치 않은 실속이 발생하였을 때 적절한 회복이 이루어지지 못한 경우에 실속 사고가 발생한다. 예를 들어 비행기 이륙 도중, 상승 선회 도중, 혹은 장애물 회피 도중 지나친 nose-high attitude를 가하면 어떤 일이 발생할 수 있는가에 대한 조종사 인식을 발전시키기 위해 power-on stalls를 연습한다. base leg에서 final approach로 선회하는 동안 조종간이 부적절하게 사용되면 어떤 일이 발생할 수 있는가에 대한 조종사 인식을 발전시키기 위해 power-off turning stalls를 연습한다. power-off straight-ahead stall은 엔진 고장 이후 활공을 할 때, 혹은 착륙 접근의 막바지일 때 발생할 수 있는 실속을 시뮬레이션 한다.
조종사는 기동 전에 해당 지역(현 고도와 그 이하의 고도)이 다른 항적들로부터 개방되어 있는지, 그리고 회복을 위한 충분한 고도 여유가 있는지를 확인해야 한다. 단발 비행기의 경우 1,500ft AGL 이상에서 회복이 이루어질 수 있는 고도에서 실속을 연습하는 것이 권장된다. 만약 AFM/POH에서 더 높은 고도를 권장한다면 이를 따른다. 실속을 회복하는 동안 고도가 손실될 것으로 예상된다.
Approaches to Stalls (Impending Stalls), Power-On or Power-Off
impending stall은 비행기가 임계 받음각에 근접할 때(그러나 임계 받음각을 초과하지는 않았을 때) 발생한다. 비행기가 실속에 근접하는 것을 인지하자마자 비행기 제어를 완전히 되찾는 방법을 배우는 것이 impending stall을 연습하는 목적이다. 또한 이러한 훈련을 통해 조종사는 적절한 조치를 취하지 않을 경우 실속이 발생할 가능성이 있다는 것을 배우게 된다. 조종사 훈련 시 impending stalls와 full stalls에 대해 동일한 회복 기술을 가르치는 데 중점을 두어야 한다.
impending stall을 연습하면 최대 비행기 성능을 필요로 하는 기동들에 대한 조종사의 감각이 개발된다. 이러한 기동들은 비행기가 실속 상태에 근접하는 비행을 필요로 하지만 만약 실속에 대한 첫 번째 징후가 발생하였다면 회복을 수행한다.
impending stalls는 full stalls나 이 장의 기타 기동들과 동일한 자세 및 외장에서 수행될 수 있다. 단, stall warning device가 울리거나 그 외의 징후(예를 들어 buffeting)를 인지하였다면 즉시 받음각을 감소시켜야 한다. 조종사는 실속 경고를 없애기 위해 기수를 낮춰야 한다. 그런 다음 날개를 수평으로 만들고 원하는 비행경로로 되돌아가는데 필요한 출력을 가한다. 비행기가 충분한 속도 및 충분한 조종간 효율과 함께 원하는 비행경로로 되돌아왔으며 실속 경고가 발생하지 않았다면 회복이 완료된 것이다. 만약 full stall이 발생하였거나, 과도한 low pitch attitude가 만들어졌거나, 혹은 과도한 속도 ∙ 과도한 고도 상실 ∙ 스핀을 방지하기 위한 조치를 적시에 취하지 못하였다면 기동의 결과가 만족스럽지 못하다.
Full Stalls, Power-Off
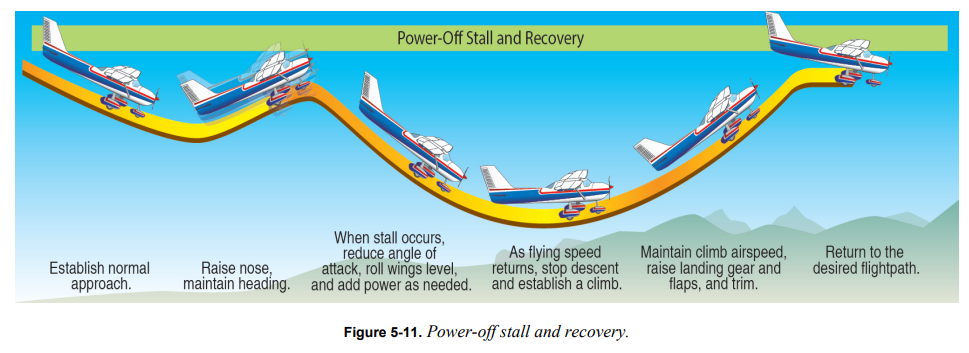
power-off stalls 연습은 보통 정상 착륙 조건에서 수행된다. 이는 착륙 접근 도중 발생하는 우발적 실속을 시뮬레이션하기 위해서이다. 허나 power-off stalls는 모든 플랩 설정에서 연습되어야 한다. 이는 기계적 고장, 착빙, 혹은 기타 비정상 상황일 때 발생하는 조작에 익숙해지기 위해서이다. 정상 접근 속도를 초과하는 속도에서 실속에 진입해서는 안 된다. 이는 비정상적인 nose-high attitude로 이어질 수 있기 때문이다.
straight-ahead power-off stall에 진입하기 위해 flaps나 retractable landing gear가 착륙 외장으로 배치되어야 한다. landing gear를 연장하고, carburetor heat(단, 해당하는 경우)를 켜고, throttle을 충분히 줄였다면 정상 접근 속도로 감속되기 전까지 일정한 고도를 유지한다. 이후 해당 속도를 유지하기 위해 정상 접근 자세을 향하여 부드럽게 기수를 낮춘다. wing flaps를 연장한 다음 속도를 유지하기 위해 pitch attitude를 조정한다. 정상 접근이 만들어졌다면 출력을 idle로 설정한다.
접근 자세 및 속도가 안정되었다면 실속이 발생하는 자세로 기수를 부드럽게 올린다. ailerons와 rudder를 통해 방향 제어와 날개 수평을 유지한다. 비행기가 실속으로 이어지는 자세에 도달하였다면 실속이 발생하기 전까지 pitch attitude를 유지한다. 이전에 설명하였던 full-stall 징후들을 통해 실속을 인지한다.
받음각을 줄이고, 실속 경고가 없어질 만큼 기수를 낮추고, 날개를 수평으로 만들고, 삼타일치를 유지하고, 필요에 따라 출력을 적용하여 실속을 회복한다. 기수를 낮추고 출력을 증가시킬 때 엔진의 torque effects를 보상하기 위해 right rudder가 필요할 수 있다. [그림 5-11] 착륙 직전에 발생한 실속을 시뮬레이션하는 경우에는 positive rate of climb을 만들어서 복행을 수행해야 한다. 상승이 설정되면 필요에 따라 flaps와 landing gear를 올린다.
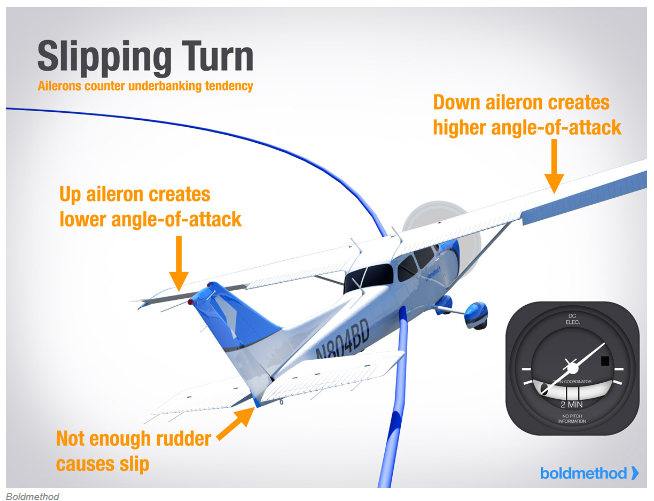
power-off stalls 연습은 shallow banked turns에서도 수행되어야 한다. 이는 base leg에서 final approach로 향하는 선회 도중 발생한 우발적 실속을 시뮬레이션하기 위함이다. 이러한 실속을 연습하는 도중 조종사는 full stall이 발생하기 전까지 선회가 일정한 bank angle로 수행되며 삼타일치가 유지되는지 주의해야 한다. 만약 slip이 발생하면 선회 바깥쪽 날개가 먼저 실속에 빠진 후에 갑자기 아래로 향할 수 있다. 만약 skid가 발생하면 bank angle이 더욱 증가해서 잠재적으로 위험한 자세에 놓일 수 있다. 한쪽 날개가 먼저 rolls off 하였다 해도 동일한 회복 절차가 적용된다. 조종사는 실속 경고가 사라질 만큼 기수를 낮추고, ailerons를 통해 날개 수평을 만들고, 삼타일치를 유지하고, 필요한 만큼의 출력을 가해야 한다. turning stalls 도중에는 특정 heading에서 실속이나 회복이 만들어지도록 연습하지 않는다. 단, base에서 final approach로 향하는 선회 도중 발생한 우발적 실속을 시뮬레이션하기 위해 약 90도의 heading 변화 이내에서 실속이 발생해야 한다.

Full Stalls, Power-On
power-on stall 회복은 직진 상승 도중, 그리고 상승 선회(15도에서 20도) 도중 연습되어야 한다. 이는 이륙, 복행, 상승, 혹은 장애물 회피 도중 우발적 실속이 발생할 수 있다는 것을 인지하는데 도움을 제공하기 위함이다. flaps나 retractable landing gear를 갖춘 비행기의 경우 보통 이륙 외장으로 설정된다. 허나 상승 외장에서의 연습을 위해 power-on stalls는 clean configuration(flaps와 gear를 접은 상태)에서도 연습되어야 한다. takeoff stall 회복을 연습하는 경우에는 최대 출력이 적용되어 있어야 한다(단, 일부 비행기의 경우 지나치게 높은 pitch attitude가 방지되는 출력 설정으로 줄어들 수 있음).
power-on stalls에 진입하기 위해 비행기를 이륙 외장이나 상승 외장으로 만든다. 그리고 실속이 발생하기 전까지 과도한 nose-up attitde가 유지되는 것을 피하기 위해 대기속도를 lift-off airspeed로 감속한다. 이때 주변에 다른 항적이 없는지 계속하여 확인한다. 원하는 속도에 도달하였다면 상승 자세를 설정함과 동시에 이륙 출력을, 혹은 power-on stall에 대해 권장하는 상승 출력을 설정한다(이는 종종 departure stall이라 불린다).
상승 자세를 만든 후 받음각을 증가시키기 위해 기수를 부드럽게 들어주고 full stall이 발생하기 전까지 그 자세를 유지한다. full stall이 발생하기 전까지 자세를 유지하는 동안 삼타일치를 유지하기 위해 aileron, elevator, 그리고 rudder를 계속하여 조정한다. 대부분의 비행기에서 조종사는 속도가 감소함에 따라 elevator control을 점점 더 당기고 right rudder를 점점 더 증가시켜야 하며 full stall에 도달하기 전까지 상승 자세를 유지해야 한다.
조종사는 실속이 발생한 시점을 인지해야 하며 이때 지체 없이 조치를 취해 장시간의 실속 상태를 방지해야 한다. 조종사는 즉시 받음각을 줄이고, 실속 경고가 사라질 만큼 기수를 낮추고, 날개를 수평으로 만들고, 삼타일치를 유지하고, 필요하다면 출력을 부드럽게 증가시켜서 실속 상태를 회복해야 한다. throttle이 이미 상승 출력 설정으로 되어있으므로 이때 출력 설정이 적절한지 확인한다. [그림 5-12]
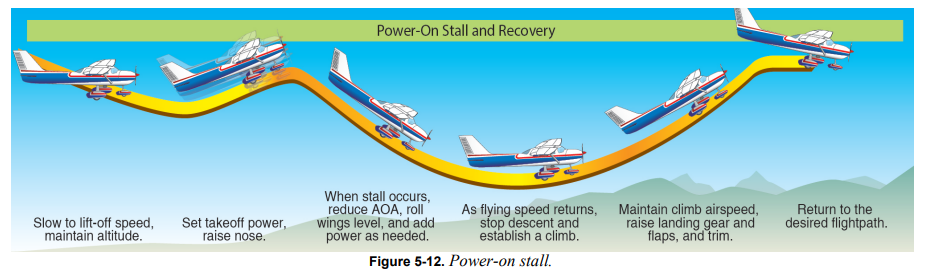
마지막 단계는 원하는 비행경로로(예를 들어 직진수평 자세나 이륙/상승 자세) 비행기를 되돌리는 것이다. 충분한 대기속도와 조종간 효율성이 만들어졌다면 적절한 출력 설정으로 throttle을 되돌린다.
Secondary stall
첫 번째 실속을 회복한 후에 발생한 실속을 secondary stall이라 부른다. 정상 회복 도중 비행기의 기수는 보통 지상으로 향한다. 그러나 만약 실속이 저고도에서 발생하였다면 조종사는 최대한 빨리 기수를 들려 시도한다. 이러한 조작은 지면과 가까울수록 더 증폭된다. 이러한 상황이 어떻게 발생하였는지 시연하기 위해 먼저 첫 번째 실속을 급하게 회복하고 다시 한 번 임계 받음각을 초과한다. 이러한 실속은 조종사가 받음각을 충분히 감소시키지 않았을 때, 혹은 출력만으로 실속을 회복하려 시도할 때에 발생할 수 있다. [그림 5-13]
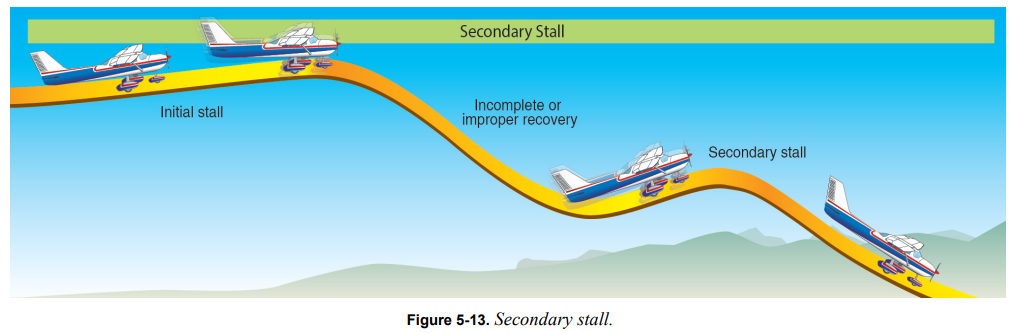
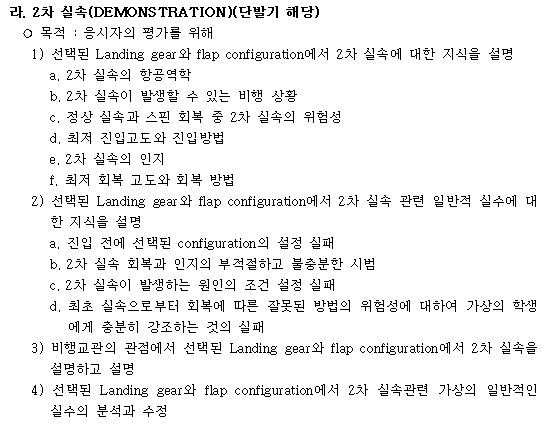
만약 secondary stall이 발생하였다면 조종사는 실속 회복 절차를 다시 수행해야 한다. 비행기가 더 이상 실속 상태가 아니게 되면 조종사는 원하는 비행경로로 비행기를 되돌릴 수 있다. 조종사 자격 시험에서 이는 demonstration-only maneuver이다. 오직 비행 교관 지원자만이 실기시험 중 이를 수행하도록 요구될 수 있다.
Accelerated stalls
accelerated stall이 어떻게 발생하는지 경험하기 위해선 훈련이 필요하다. 비행기의 실속 특성을 확인하기 위해, +1G 실속 속도 이상의 속도에서 실속을 경험하기 위해, 그리고 이러한 실속 발생 시 본능적으로 회복하는 능력을 개발하기 위해 accelerated stall이 시연된다. 이 기동은 오직 사업용 조종사 지원자와 비행 교관 지원자만이 실기시험에서 수행하도록 요구될 수 있다. 허나 모든 조종사들은 accelerated stall이 발생할 수 있는 상황에 대해, 이러한 유형의 실속을 인지하는 방법에 대해, 그리고 실속 회복 방법에 대해 숙지해야 한다.
총 무게, 비행기 외장, CG 위치, 출력 설정, 그리고 환경 조건이 동일할 경우 +1G 상태(즉, 안정된 비가속 비행 상태)인 특정 비행기는 항상 동일한 지시 속도에서 실속에 빠진다. 그러나 비행기가 +1G를 초과하는 가속을 받으면(예를 들어 선회, 기수 당김, 혹은 비행경로의 급격한 변화) 더 높은 지시 속도에서 실속에 빠질 수 있다. G-load가 +1G를 초과할 때 발생하는 실속을 “accelerated maneuver stalls”라고 부른다. 선회가 부적절하게 수행될 때, 실속/스핀을 회복할 때, 가파른 강하 도중 기수를 당길 때, 혹은 base에서 final로 선회 도중 overshoot이 발생하였을 때 accelerated stall이 가장 자주 발생한다. accelerated stall은 보통 steep turns 도중 시연된다.
조종사는 wing flaps가 연장된 상태에서 accelerated stalls를 연습해서는 안 된다. 왜냐하면 이 외장에서는 design G-load limitations가 낮기 때문이다. accelerated stalls는 대략 45도의 bank에서 수행되어야 하며 어떤 경우에도 비행기 제조업체의 권장 속도나 특정 design maneuvering speed(VA)/operating maneuvering speed(VO)보다 낮은 속도에서 수행되어야 한다.
조종사는 VA/VO를, VA/VO와 accelerated stalls의 관계를, 그리고 비행기 무게에 따라 VA/VO가 어떻게 변화하는지를 숙지해야 한다. VA는 돌풍에 의한, 혹은 하나의 조종면에 가해진 full one-sided deflection에 의한 positive design load limit가 구조적 손상 없이 가해질 수 있는 최대 속도이다. VO는 특정 비행기에서만 적용되는 과거의 운영 제한사항이다. VO는 design limit load factor가 초과되지 않고도 full control을 적용할 수 있는 최대 속도를 나타낸다. VA나 VO 이하의 속도로 accelerated stall을 수행하면 design load limit가 초과되기 전에 비행기가 임계 받음각에 도달한다. VA나 VO 너머의 속도에서는 임계 받음각 미만에서도 design load limit에 도달할 수 있다. 비행기의 무게가 실속 속도와 구조적 한계에 미치는 영향에 대한 정보는 PHAK의 “Aerodynamics of Flight”에서 확인할 수 있다.
'PHAK(2023)/5: Aerodynamics of Flight' 카테고리의 글 목록
instructor-pang.tistory.com
accelerated stall을 수행하는 방법에는 두 가지가 있다. 가장 일반적인 accelerated stall 절차는 VA나 VO 이하의 속도로 직진수평비행을 수행할 때 시작된다. 조종사는 삼타일치를 유지하면서 45도 bank로 수평 선회를 수행한다. 그런 다음 실속이 발생하기 전까지 받음각을 점진적으로 증가시킨다. 다른 방법으로는 VA나 VO 너머의 속도에서 삼타일치를 유지하면서 45도 bank로 수평 선회를 수행한다. 속도가 비가속 실속 속도보다 5 ~ 10% 빠른 속도에 도달하였다면 실속이 발생하기 전까지 받음각을 점진적으로 증가시킨다. back elevator pressure이 증가하면 양력과 G load가 증가한다. G load는 조종사의 몸을 좌석 아래쪽으로 민다. 양력이 증가하면 항력도 증가하므로 속도가 줄어들 수 있다. 조종사는 기동을 수행하기 전에 45도 bank(flaps up)에 대한 실속 속도를 알아야 한다. 이 속도는 보통 AFM에 게재된다.
비행기가 일정한 고도에서 삼타일치 선회를 수행할 때 발생하는 실속은 날개 수평 상태에서 발생하는 실속과 유사하다(단, stall buffet이 더 뚜렷할 수 있음). 삼타일치가 유지된 상태로 선회하던 도중 실속이 발생하면 날개 수평 상태에서 실속에 빠진 것과 마찬가지로 비행기 기수가 떨어진다. 왜냐하면 양쪽 날개가 거의 동시에 실속에 빠지려는 경향이 있기 때문이다. 만약 삼타일치가 제대로 유지되지 못한 상태에서 실속이 발생하면 받음각이 줄어들기 전까지 bank angle이 변화하는 실속 특성이 발생할 수 있다. 실속의 첫 징후가 발생하였을 때(impending stall 훈련/체크인 경우), 혹은 실속이 완전히 발달하였을 때(full stall 훈련/체크인 경우) 회복 조치를 취하는 것이 중요하다. 갑작스러운 기동으로 인해 발생한 실속은 비가속 +1G 실속보다 더 심각한 경향이 있다. 왜냐하면 이러한 실속들은 정상 속도보다 높은 속도에서 발생하거나 생각보다 낮은 pitch attitudes에서 발생할 수 있기 때문이다. accelerated stall은 비행기를 예상치 못한 자세에 놓이게 할 수 있으므로 즉시 회복을 수행하지 않으면 비행기가 스핀에 진입하거나 제어를 벗어날 수 있다.
Cross-control Stall
cross-control stall은 uncoordinated flight가 실속 특성에 미치는 영향을 보여주며 선회 도중 coordinated flight를 유지하는 것의 중요성을 강조한다. 이 기동은 demonstration-only maneuver이다. 오직 교관 지원자만이 실기 시험 도중 이를 수행하도록 요구받을 수 있다. 허나 모든 조종사들은 cross-control stall이 발생할 수 있는 상황을, 실속을 인지 및 방지하는 방법을, 그리고 실속 회복 방법을 숙지해야 한다.
uncoordinated, cross-control stall의 공기역학적 효과는 조종사들을 놀라게 만들 수 있다. 왜냐하면 이러한 실속은 거의 경고 없이 발생할 수 있으며 만약 이러한 실속이 지면 근처에서 발생하면 매우 치명적일 수 있기 때문이다. 기수가 아래로 떨어지고, bank angle이 갑자기 바뀌고, 비행기가 반대 방향으로 계속하여 roll 할 수 있으며 이로 인해 보통 스핀이 시작된다. 따라서 비행기가 spiral이나 spin에 진입하기 전에 실속 회복 절차를 수행하는 것이 필수적이다.
한 쪽 방향으로 aileron을 가하고 그 반대 쪽 방향으로 rudder를 가한 상태(uncoordinated flight)에서 임계 받음각이 초과되면 cross-control stall이 발생한다. skidding cross-control stall은 장주 패턴에서 발생할 가능성이 가장 높으며 이는 base-to-final approach turn이 부적절하게 계획 및 수행되었을 때 나타난다. base leg에서 배풍 성분을 인지하지 못하면 조종사는 선회를 늦게 시작하거나 충분치 못한 bank를 가한다. 비행기가 활주로 중심선을 overshoots 하면 조종사는 bank angle을 증가시키고, back elevator pressure를 증가시키고, 선회 방향으로 과도한 rudder를 가해서 이를 수정하려 시도한다. 안쪽 날개와 바깥쪽 날개의 양력 차이가 증가할 것이며 이로 인해 원치 않게 bank angle이 증가한다. 그리고 이와 동시에 비행기의 기수는 아래로 떨어진다. 이때 조종사가 elevator control을 당길 수 있으며 이로 인해 받음각이 임계 받음각을 향해 증가할 수 있다. 이러한 조작으로 인해 실속이 발생하면 비행기가 빠르게 스핀에 진입할 수 있다. “overshoot”이 발생하였을 때 가장 안전한 조치는 복행을 수행하는 것이다. base-to-final approach turn은 비교적 낮은 고도에서 수행되므로 30도 이상의 bank angle을 사용하지 않도록 해야 하며 overshoot을 수정할 때 skidding turn을 수행해서는 안 된다.
실속을 수행하기 전에 조종사는 스핀을 대비해서 안전한 고도를 설정해야 한다. 그런 다음 throttle을 천천히 줄이면서 주변에 다른 항적이 없는지 확인한다. 이후 landing gear를 내리고(단, retractable gear를 장비한 경우), throttle을 닫고, 정상 활공 속도에 도달하기 전까지 고도를 유지한다. 비행기의 한계가 초과될 가능성을 피하기 위해 flaps는 연장하지 않는다. 활공 자세 및 속도가 설정되는 동안 비행기를 retrim 한다. 활공이 안정되었다면 활주로 중심선을 overshoot 하는 최종 접근 선회를 시뮬레이션하기 위해 medium-bank turn을 수행한다.
선회 도중 선회 방향을 향해 과도한 rudder를 부드럽게 적용한다. 이때 반대쪽 aileron을 적용해서 bank가 일정하게 유지되도록 한다. 이와 동시에 기수가 낮아지는 것을 막기 위해 back elevator pressure를 증가한다. 이러한 조작들은 비행기가 실속에 빠지기 전까지 증가되어야 한다. 실속이 발생하면 실속 경고가 사라지기 전까지 받음각을 감소시키고, 과도하게 적용한 rudder를 풀어주고, 날개를 수평으로 만들고, 필요한 만큼 출력을 더해준다. 이를 통해 회복이 완료되면 원하는 비행경로로 되돌아간다.
Elevator Trim Stall
elevator trim stall demonstration은 복행을 위해 최대 출력을 가했을 때 비행기 제어를 적극적으로 유지하지 않으면 어떤 일이 발생할 수 있는지 보여준다. [그림 5-14] 이는 demonstration-only maneuver이므로 교관 지원자만이 실기시험에서 수행하도록 요구될 수 있다. 허나 모든 조종사들은 elevator trim stall이 발생할 수 있는 상황을 숙지해야 하고, 이러한 실속이 발생하는 것을 인지해야 하며, 이를 방지하기 위한 적절한 조치를 취해야 한다.
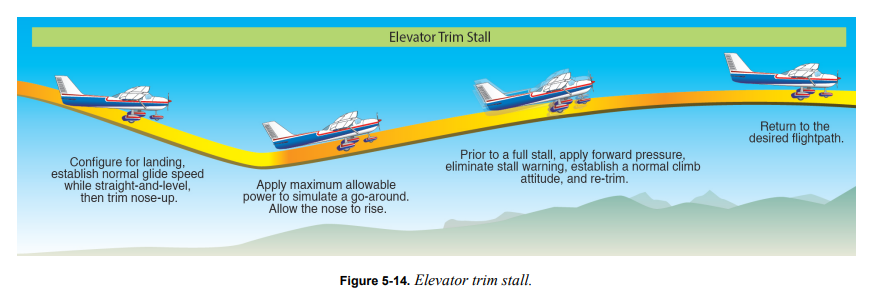
이러한 상황은 normal landing approach나 simulated forced-landing approach 도중 복행을 수행할 때, 혹은 이륙 직후에 발생할 수 있다(이때 trim은 power idle 상태에서의 정상 착륙 접근 속도로 설정). elevator trim stall demonstration은 부드러운 출력 적용, trim 압력 극복, 적극적인 조종, 그리고 적절한 trim 기법의 중요성을 보여준다. 이는 또한 elevator trim stall로 이어질 수 있는 상황을 피하게 만드는, elevator trim stall이 근접할 때 이를 인지하게 만드는, 그리고 full stall을 방지하기 위해 신속하고 올바른 조치를 취하는 능력을 개발해준다. 접근 및 착륙 도중 실제로 복행을 수행하였을 때 이러한 elevator trim stall이 발생하지 않도록 주의해야 한다.
안전한 고도에 도달한 후 그 지역에 다른 항적이 없는 것을 확인하였다면 천천히 throttle을 줄이고 landing gear를 연장한다(단, 비행기가 retractable gear를 장비한 경우). 그런 다음 flaps를 one-half position이나 full position으로 연장하고, throttle을 닫고, 정상 활공 속도에 접근하기 전까지 고도를 유지한다.
정상 활공이 설정되었다면 조종사는 정상 착륙 접근 활공 상태로 비행기를 nose-up trim 한다. 그런 다음 복행을 수행할 때처럼 throttle을 최대까지 부드럽게 증가시킨다.
꼬리를 흐르는 propwash 증가로 인한 영향과 elevator trim으로 인한 영향이 합쳐지면서 기수가 급격히 올라가려는 경향이 발생한다. throttle이 최대로 증가되면 pitch attitude가 정상 상승 자세보다 높아진다. 비행기가 실속에 근접하는 것이 명백하다면 비행기를 정상 상승 자세로 되돌리기 전에 충분한 forward elevator pressure를 가해서 받음각을 감소시키고 실속 경고를 없애야 한다. 조종사는 무거운 조종간 압력을 완화하기 위해 trim을 조정한 다음 복행 절차를 완료하고 원하는 비행경로로 돌아가야 한다. full stall에 진입하였다면 받음각을 줄이기 위해 기수를 상당히 내려야 하며 이는 상당한 고도 손실을 동반할 것이다.
Common Errors
intentional stalls를 수행할 때 발생하는 일반적인 오류들은 다음과 같다:
1. 주변을 충분히 확인하지 않음.
2. 회복 이후 airspeed indicator와 slip-skid indicator만 의존하고 다른 단서들은 무시함.
3. power-off stall이나 power-on stall 진입 도중 조종간을 너무 빠르게 당겨서 의도치 않은 accelerated stall로 이어짐.
4. impending stall 조건을 인지하지 못함.
5. impending stall 수행 도중 full stall을 방지하기 위한 조치를 시기적절하게 취하지 못함.
6. turning stalls 도중 일정한 bank angle을 유지하지 못함.
7. 실속 및 회복 도중 적절한 삼타일치를 유지하지 못함.
8. full stall maneuver 연습 도중 임계 받음각에 도달하기 전에 회복을 수행함.
9. 받음각을 줄이기 전에 wing leveler나 autopilot(단, 만약 장비한 경우)을 해제하지 않음.
10. 받음각의 중요성을 인지하지 못한 채 회복을 시도함.
11. 실속 경고가 사라기지 전까지 기수를 낮추지 않음.
12. 받음각을 줄이기 전에 날개를 수평으로 만들려 시도함.
13. 받음각을 줄이기 전에 출력을 통해 실속을 회복하려 시도함.
14. 받음각이 감소하고 실속 경고가 사라진 후 날개를 수평으로 만들지 못함.
15. 회복 도중 부주의로 인해 secondary stall이 발생함.
16. 회복 도중 과도한 forward-elevator pressure를 가하여 -G load가 발생함.
17. 회복 도중 속도가 과도하게 증가함.
18. 상황 인식을 상실하여 원하는 비행경로로 되돌아가지 못하거나 ATC 지시를 따르지 못함.
Spin Awareness
스핀이란 실속이 발생한 후에 발생할 수 있는 aggravated stall condition이다. 실속 상황에서 yaw control을 제대로 조작하지 못하면 스핀에 진입할 가능성이 높아진다. 스핀이 발생하면 비행기는 아래를 향하여 나선형으로 회전한다. 스핀 도중 비행기는 각 날개의 서로 다른 양력 및 항력으로 인해 수직축을 중심으로 회전하며 gravity, rolling, yawing, 그리고 pitching으로 인해 나선 경로로 하강한다. [그림 5-15] 스핀의 종류는 다양하다. 특정 비행기에서 발생하는 스핀의 유형은 비행기 설계, 적재, 조종간 입력, 그리고 밀도 고도에 의해 달라질 수 있다. 어떠한 스핀에서도 최소한 한 쪽 날개가 실속에 빠진다. 비행 중인 형식에 적합한 스핀 회복 기술을 위해 POH를 참조한다. POH의 절차는 이 장의 정보들보다 우선된다.

스핀은 적어도 하나의 날개가 임계 받음각을 초과하였을 때 비행기에 sideslip이나 yaw가 작용하면 발생한다. yaw는 잘못된 rudder 적용, aileron 조작으로 인한 adverse yaw, 엔진/프로펠러 영향(p-factor, torque, spiraling slipstream, gyroscopic precession), 그리고 wind shear(예를 들어 항적 난기류)로 인해 발생한다. 잘못된 rudder 적용으로 인해 yaw가 발생한 경우 조종사는 yaw가 통제 불능 상태가 된 후에야 임계 받음각이 초과되었다는 사실을 인지할 수 있다. slipping turn이나 skidding tun 도중에 실속이 발생하면 rudder를 적용한 방향으로 스핀에 진입할 수 있다. 만약 조종사가 즉시 실속 회복을 수행하지 않으면 비행기가 스핀에 진입할 수 있다.
방향 제어를 유지하는 것, 그리고 실속 회복이 수행되기 전에 기수가 yaw 하지 않도록 유지하는 것이 스핀을 방지하는 핵심 요소이다. 기수가 yaw하지 않고 날개가 bank지지 않으려면 정확한 양의 rudder가 적용되어야 한다.
최신 비행기는 옛날 비행기에 비해 스핀에 진입하지 않는다. 허나 스핀이 불가능한 것은 아니다. 선회, 실속, 그리고 uncoordinated slow flight 도중 조심성 없이 비행하면 설령 최신 비행기라 해도 accidental spin에 빠질 수 있다. accidental stall/spin으로 이어질 수 있는 상황을 방지하는 것, 그리고 정상 비행으로 회복하기 위해 올바른 조처를 취하는 것이 숙달되어야 한다. 비행기가 스핀에 진입하기 위해선 stall과 yaw가 발생해야 한다. 따라서 실속의 인지 및 회복을 지속적으로 연습하면 조종사가 approaching spin을 인지하는데 있어 보다 본능적이고 즉각적으로 반응하게 된다. spin이나 approaching spin을 인지하였다면 조종사는 즉시 스핀 회복 절차를 수행해야 한다.
Spin Procedures
스핀을 시연하기 위한 첫 번째 규칙은 비행기가 스핀에 대해 승인되어있는지 확인하는 것이다. 아래의 설명은 보편적인 스핀 절차를 다룬다는 점을 참고하라. 여기서는 특정 비행기에서 필요로 하는 특정 스핀 절차나 기술을 다루지 않는다. 안전을 위해 스핀을 시연하기 전에 먼저 AFM/POH와 규정을 주의 깊게 검토한다. 여기에는 다음 항목들이 포함되어야 한다:
∙ 비행기가 스핀에 대해 승인되어 있는지 확인하기 위해 AFM/POH의 limitations section, placards, 혹은 type certification data을 확인한다.
∙ weight and balance limitations를 확인한다.
∙ 권장하는 스핀 진입 및 회복 절차를 확인한다.
∙ 최신 14 CFR part 91 parachute 조건을 확인한다.
또한 철저한 비행 전 점검이 필수적이다. 물품들이 과하게 적재되었거나 단단히 고정되지 않으면 비행기의 무게, CG, 그리고 조종성에 영향을 미칠 수 있으므로 이러한 점들에 중점을 둔다. 또한 제조업체가 결정한 CG limitations 이내에 무게중심이 위치하는지 확인하는 것도 중요하다. control cables(특히 rudder와 elevator)가 느슨하면 스핀 회복을 위한 최대 조작이 적용되지 않을 수 있으며 이로 인해 회복이 지연되거나 불가능할 수 있다.
intentional spin을 수행하기 전에 비행기 위아래로 항적이 없는지 확인한다. 또한 모든 스핀 회복이 1,500ft AGL 이상에서 완료될 수 있을 정도로 높은 고도에서 기동을 수행해야 한다. 스핀의 첫 회전은 대략 1,000ft의 고도 손실을 초래하며 그 이후에는 매 회전마다 약 500ft가 손실된다.
clean configuration에서 power-on stall과 power-off stall을 연습한 후에 스핀 훈련을 시작하는 것이 적절할 수 있다. 이러한 훈련은 조종사로 하여금 비행기의 특정한 실속 및 회복 특성을 숙지하는데 도움이 된다. 훈련 도중 조종사는 출력 조작에 주의해야 하며 제조업체가 권장한다면 carburetor heat(단, 만약 장비한 경우)을 적용해야 한다.
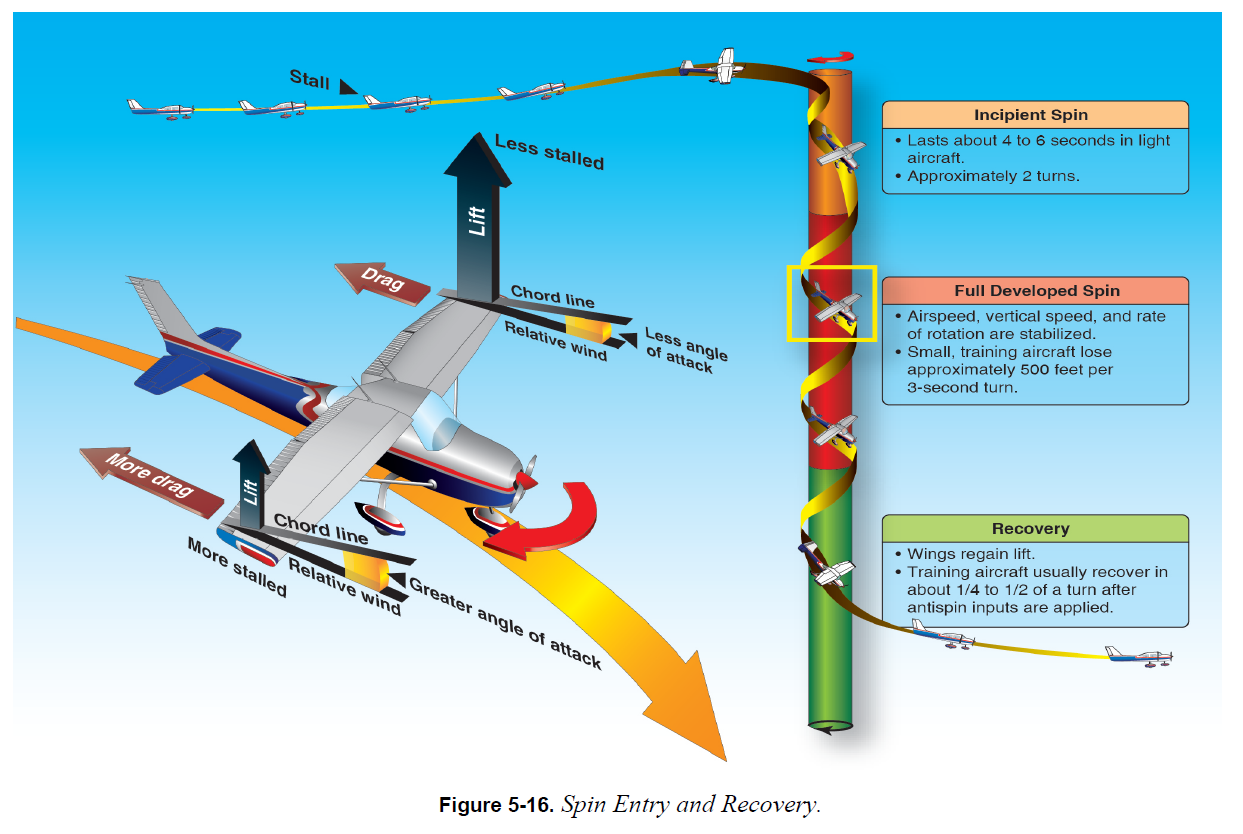
스핀에는 네 가지 단계가 있다: entry, incipient, developed, recovery. [그림 5-16]
Entry phase
entry phase에서 조종사는 스핀에 필요한 요소들을 의도적으로 만든다. 스핀을 시연하기 위한 진입 절차는 power-off stall과 유사하다. 스핀 진입 도중 조종사는 천천히 출력을 idle로 감소시키면서 실속이 발생할 정도로 pitch attitude를 든다. 비행기가 실속에 근접하면 조종사는 스핀을 발생시킬 방향으로 full rudder를 부드럽게 가하며 이와 동시에 full back (up) elevator를 적용한다. AFM/POH에서 달리 명시하지 않는 한 aileron을 neutral position으로 유지한다.
Incipient phase
incipient phase란 비행기가 실속에 빠져서 회전하기 시작할 때부터 스핀이 완전히 발달하기 전까지를 의미한다. 이 단계에서 대부분의 비행기는 2 ~ 4번의 회전을 할 수 있다. 이 단계에서 공기역학적 힘과 관성력이 균형을 이루지 못한다. incipient phase가 발달할수록 지시 속도가 낮은 속도에서 안정될 것이며 turn indicator의 symbolic airplane이 스핀 방향을 지시할 것이다. 스핀 방향을 결정하기 위해 slip/skid ball(inclinometer)을 사용해서는 안 된다. inclinometer가 설치된 위치에 따라 ball이 움직이는 방향이 달라진다. 예를 들어 비행기의 왼쪽에 ball이 장착되어 있다면 설령 오른쪽으로 스핀이 발생하여도 ball이 항상 왼쪽으로 움직인다.
조종사는 360도 회전이 완료되기 전에 incipient spin 회복 절차를 시작해야 한다. 조종사는 회전 반대 방향으로 full rudder를 적용해야 한다. 만약 방향 감각을 잃었다면 turn indicator를 사용한다.
incipient spins는 초기 스핀 훈련 및 회복 기법에서 가장 일반적으로 사용되는 기동이다.
Developed phase
developed phase는 비행기의 각 회전율, 대기 속도, 그리고 수직 속도가 수직 비행경로에서 안정되었을 때 발생한다. developed phase에서는 공기역학적 힘과 관성력이 균형을 이루며 수직축에 대한 비행기의 자세, 각도, 그리고 움직임들이 일정하거나 반복적이다. 스핀은 평형 상태에 놓인다. 일부 훈련용 비행기는 developed phase에 진입하지 않지만 incipient phase에서 spiral dive로 전환될 수 있음을 주의해야 한다. spiral dive에서 비행기는 평형 상태에 놓이지 않는 대신 가속을 하며 이로 인해 G load가 급격히 증가할 수 있다.
Recovery phase
회전을 중단시키고 받음각을 임계 받음각 미만으로 감소할 때 recovery phase가 시작된다. 비행기와 스핀 유형에 따라 회복을 위해 적게는 4분의 1바퀴에서 많게는 몇 바퀴가 소요될 수 있다. 회전 평형을 깨뜨리기 위해 조종사는 회전이 중단되도록, 그리고 날개가 실속에서 벗어도록 조종간을 적용한다. 스핀 회복을 위해 조종사는 항상 제조업체의 권장 절차를 따라야 한다. 제조업체가 권장하는 스핀 회복 절차와 기술이 없다면 그림 5-17의 스핀 회복 절차를 사용한다. 스핀 전에 flaps 및/혹은 retractable landing gear가 연장되어 있었다면 스핀 진입 후에 이를 최대한 빨리 접는다.
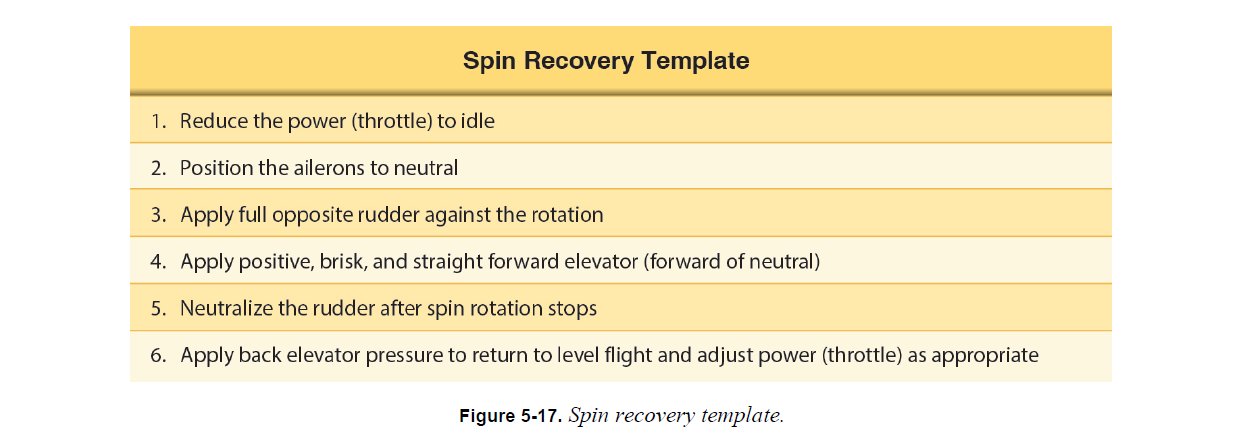
다음은 스핀 회복을 위해 따라야 하는 6단계를 설명한다:
1. 출력(throttle)을 idle로 줄인다. 출력은 스핀 특성을 악화시킨다. 출력은 더욱 평평한 스핀 자세를 초래할 수 있으며 보통 회전 속도를 증가시킨다.
2. ailerons를 neutral에 둔다. ailerons는 스핀 회복에 악영향을 미칠 수 있다. 스핀 방향으로 aileron을 가하면 회전 속도가 빨라지고, 스핀 자세를 가파르게 만들며, 회복을 지연시킬 수 있다. 스핀 반대 방향으로 aileron을 가하면 스핀 자세를 평평하게 만들며 회복을 지연시킬 수 있다(심지어 unrecoverable spin으로 이어질 수도 있음). 가장 좋은 절차는 ailerons를 neutral에 두는 것이다.
3. 회전이 멈출 때까지 회전 반대 방향으로 full rudder를 적용한다. 전형적인 단발 비행기에서 회복을 위한 가장 중요한 조작은 rudder이다. 회전 반대 방향으로 빠르게 full rudder를 적용한다. 스핀 회복 도중 rudder를 느리게 적용하면 비행기가 계속해서 회전할 수 있으므로 이를 피한다. 빠르고 확실하게 rudder를 적용해야 더욱 확실한 스핀 회복이 이어진다.
4. 빠르게 straight-forward elevator를 적용한다. 이는 full rudder를 적용한 후에 바로 수행되어야 한다. 이 단계를 수행하기 전에 선회가 멈추기를 기다리지 않는다. elevator 조작은 받음각을 감소시켜서 비행기를 실속으로부터 벗어나게 만든다. 경우에 따라 회복을 위해 full forward elevator가 필요할 수 있다. 스핀이 멈추기 전까지 조종간을 이 위치에 단단히 고정한다. (NOTE: 만약 속도가 증가한다면 비행기는 더 이상 스핀 상태가 아니다. 스핀 도중 비행기는 실속에 빠진 상태이기 때문에 지시 속도가 비교적 낮고 일정하며 가속하지 않는다.)
5. 스핀이 멈춘 후 rudder를 풀어준다. 증속 도중 rudder를 풀어주지 못하면 yawing이나 sideslipping이 발생한다.
6. 수평 비행으로 돌아가기 위해 back elevator pressure를 가해준 뒤 출력을 조절한다. 이때 과도한 back elevator pressure를 가하지 않도록 주의한다. 과도한 back elevator pressure는 secondary stall을 유발할 수 있으며 이로 인해 또 다른 스핀이 발생할 수 있다. 기수를 당기는 도중 G-load 한계와 속도 제한을 초과하지 않도록 주의한다.
다시 한번 말하지만 이 스핀 회복 절차는 제조업체의 절차가 없는 경우에만 사용하도록 권장된다. 조종사는 항상 제조업체의 스핀 회복 절차를 숙지하고 있어야 한다.
Intentional Spins
만약 제조업체가 스핀을 승인하지 않는다면 CFR에 의해 intentional spins가 허가되지 않는다. 스핀 기동이 승인되었는지 확인하는 공식적인 방법은 다음과 같다:
∙ 형식증명자료집(Type Certificate Data Sheets)이나 항공기설계명세서(aircraft specifications)
∙ 총 무게, CG range, 혹은 연료량에 관한 AFM/POH의 limitation section
∙ 비행기의 placard(예: “NO ACROBATIC MANEUVERS INCLUDING SPINS APPROVED”)
스핀이 승인되지 않은 비행기에서는 fully-developed spin이 회복 가능하다는 보장이 없다. 조종사들이 의도적으로 스핀 제한을 무시해서 발생한 사건들이 많다. intentional spins를 금지하는 placard가 설치되어있음에도 불구하고 일부 조종사들은(그리고 심지어 일부 교관들은) 기동을 시도한다. 이들은 비행기가 증명 도중 스핀 테스트를 받았다면 스핀을 연습해도 아무런 문제가 없다고 믿는다.
이러한 조종사들은 14 CFR part 23, section 23.221(a)에서 명시하는 규정을 간과한다(normal category single-engine airplanes는 한 번의 스핀이나 3초의 스핀 중 더 오래 걸리는 스핀으로부터 회복을 위한 첫 번째 조작이 이루어진 후 한 번의 추가 회전 이내에 회복이 완료되거나, 혹은 해당 규정의 optional spin resistance requirements를 준수해야 한다). 즉, 이러한 비행기들 중 대부분은 fully developed spin으로부터 회복되도록 요구되지 않는다. 14 CFR part 23, section 23.2150은 비행기의 스핀 특성과 관련된 증명 조건을 명시한다. intentional spin을 승인하지 않는다는 placard가 부착된 비행기의 조종사는 비행기가 스핀에 빠지면 제어가 불가능할 수 있다 가정해야 한다.
Weight and Balance Requirements Related to Spins
스핀이 승인된 비행기에서는 weight and balance 조건을 준수하는 것이 안전한 기동 및 회복을 위해 중요하다. 무게나 균형의 사소한 변화가 비행기의 스핀 회복 특성에 영향을 미칠 수 있다는 것을 알아야 한다. 이러한 변화는 스핀 기동 및/혹은 회복 특성을 저하시키거나 향상시킬 수 있다. 예를 들어 aft baggage compartment에 무게가 추가되거나 연료가 추가되면 설령 비행기가 CG 이내에서 운영된다 하여도 스핀 및 회복 특성에 심각한 영향을 미칠 수 있다. utility category에서는 의도적으로 스핀에 진입하기 어려운 비행기가 normal category에서는 쉽게 스핀에 진입할 수 있다. 이러한 상황은 더 높은 받음각을 만들 수 있는 비행기 능력으로부터 발생한다. 스핀이 승인된 utility category 비행기가 normal category에 따라 적재되면 한 바퀴 이상의 스핀이 발생하였을 때 회복이 불가능할 수 있다.
Common Errors
intentional spins를 수행하는데 있어 일반적인 오류는 다음과 같다:
1. 스핀 진입 시 원하는 방향으로 full rudder를 가하지 못함.
2. 스핀 진입 시 full up-elevator pressure를 적용 및 유지하지 못하여 spiral이 발생함.
3. 스핀 진입 전에 fully-stalled condition을 달성하지 못함.
4. 회복 도중 full rudder를 빠르게 적용하지 못함.
5. 회복 도중 충분한 forward-elevator를 적용하지 못함.
6. forward-elevator를 적용하기 전에 선회가 멈추기를 기다림.
7. 선회가 멈춘 후 rudder를 풀어주지 못함(이는 secondary spin으로 이어질 수 있음).
8. 회복 도중 조종간 조작이 느리고 지나치게 조심스러움.
9. 선회가 멈춘 후 과도한 back-elevator pressure를 가함(이는 secondary stall로 이어질 수 있음).
10. 회복 도중 back-elevator pressure를 충분히 가하지 못하여 과도한 속도로 이어짐.
Spiral Dive
spiral dive(nose-low upset)란 비행 속도와 G-load가 급격히 증가하는 하강 선회로 이는 종종 잘못된 선회로 인하여 발생한다. spiral dive에서 비행기는 거의 수직에 가까운 자세로 매우 촘촘한 원을 그린다. 이때 비행기는 더 이상 실속 상태가 아니기 때문에 가속할 것이다. 보통 의도치 않게 IMC에 진입하였을 때 spiral dive가 발생하는데 특히 조종사들이 비행 계기보다 운동 감각에 의존할 때 그러하다. 감각들에 의해 혼란에 빠진 조종사는 slightly nose-low, wing-low, descending turn에 쉽게 진입할 수 있으며 적어도 초기에는 이 오류를 인지하지 못할 수 있다. 특히 IMC에서는 속도가 빨라지는 소리만이 상황이 급변하고 있다는 유일한 단서일 수 있다. steep nose-down attitude와 steep bank를 인지한 조종사는 날개를 수평으로 되돌리면서 조종간을 빠르게 당길 수 있다. 이로 인해 공기역학적 하중이 발생할 수 있으며 이는 기체의 구조적 손상 및/혹은 파괴를 일으킬 수 있다.
다음은 조종사가 spiral dive를 회복하기 위해 사용해야 하는 5단계를 설명한다:
1. 출력(throttle)을 idle로 줄인다. 즉시 출력을 idle로 줄여서 가속을 늦춘다.
2. forward-elevator를 가한다. 날개를 수평으로 만들기 전에 비행기의 G-load를 줄여주는 것이 중요하다(“unload the wing”). +1G로 돌아가기 위해 약간의 forward-elevator pressure를 가한다. aft elevator로 인해 spiral이 악화되지 않을 정도의 forward-elevator를 가한다. 다음 회복 단계를 수행하기 전에 forward-elevator를 가하는 것은 몇 가지 이점이 있다(받음각 감소, G-load 감소, 선회 반경 증가 및 선회율 감소, 그리고 rolling pullout 방지). rolling pullout이 수행되면 비행기의 design limit가 더 쉽게 초과되므로 날개를 수평으로 만들기 전에 G-load를 감소시키지 않으면 구조적 손상/파괴가 발생할 수 있다.
3. 삼타일치를 적용하여 날개를 수평으로 되돌린다. 설령 nose-low 자세가 만들어졌어도 4단계를 수행하기 전에 날개를 완전히 수평으로 만들어야 한다.
4. 기수를 부드럽게 들어 올린다. spiral dive 도중 속도가 VNE를 초과할 수도 있다. 따라서 구조적 파괴를 방지하기 위해 조종을 부드럽고 천천히 수행한다. 속도가 안전한 수준으로 감소한 후에 기수를 상승 자세로 올린다.
5. 상승 출력으로 throttle을 증가시킨다. 속도가 VY에서 안정되었다면 상승 출력을 적용하고 안전한 고도로 상승한다
일반적인 spiral dive 회복 절차는 그림 5-18에 요약되어 있다.

Common Errors
spiral dive를 회복할 때 발생하는 일반적인 오류는 다음과 같다:
1. 먼저 출력을 줄이지 않음.
2. 실수로 출력을 더함.
3. 날개를 수평으로 만들지 않고 기수를 당기려 시도함.
4. 날개를 수평으로 만들면서 기수를 당김.
5. 날개를 수평으로 만들기 전에 G를 줄여주지 않음.
6. 상승이 설정된 후에 출력을 추가하지 않음.
UPRT Summary
중요한 점은 UPRT 기술들이 복잡하며 까먹기 쉽다는 것이다. 올바른 심성 모형을 설정하기 위해서는 반복이 필요하며 계속된 연습/훈련 또한 필요하다. UPRT 절차가 도입 및 수행되는 전후 관계도 중요한 고려사항이다. 예를 들어 조종사는 특정 절차가 광범위하게 적용되는지 아니면 특정 형식에 적용되는지 명확하게 이해해야 한다. 가장 높은 수준의 학습을 위해선 주어진 절차의 가장 광범위한 형태에서 시작한 다음 해당 절차를 특정 형식에 대한 조건으로 좁혀나간다.
'Airplane Flying Handbook(2021) > 5: Maintaining Aircraft Control: UPRT' 카테고리의 다른 글
| (1) Introduction (0) | 2022.12.15 |
|---|---|
| (2) Upset Prevention and Recovery (0) | 2022.12.15 |
| (3) Slow flight (0) | 2022.12.15 |
| (5) Chapter Summary (0) | 2022.12.15 |