Terminal Arrival Area(TAA)
GPS/RNAV 장비를 갖춘 입항 항공기에게 transition method를 제공하기 위해 TAA procedure가 설계되었다. TAA는 feeder routes, departure extension, 그리고 procedure turns/course reversal의 필요성을 없애거나 줄여준다. TAA는 standard RNAV approach configuration이나 modified RNAV approach configuration과 관련하여 설정된 관제 공역이다.

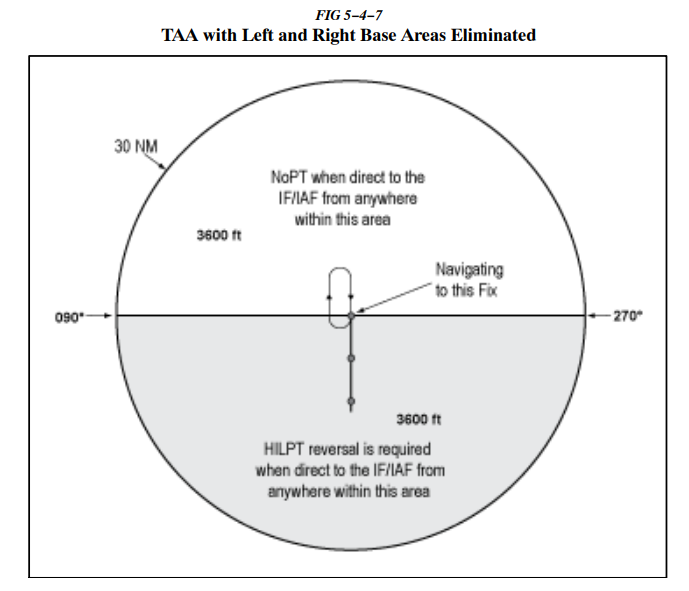
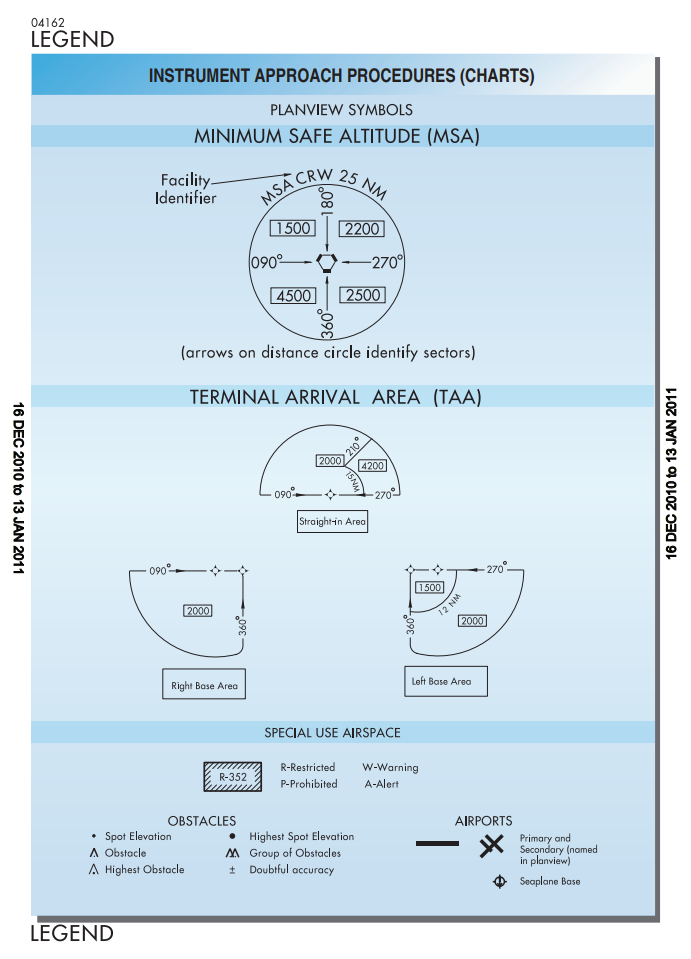
standard TAA는 세 가지 영역으로 구성된다: straight-in, left base, 그리고 right base. TAA 영역의 경계선들은 접근에 대해 게재된 부분으로 항공기가 en route structure에서 가장 가까운 IAF로 전환할 수 있게 해준다. 이러한 경계선을 통과할 경우, 혹은 ATC로부터 해당 영역 내로 release 될 경우 조종사는 비행 중인 접근 영역에 대한 waypoint IAF로 직접 향해야 한다. 모든 접근 영역에서 조종사는 holding pattern으로 직접 향할 선택권을 갖는다.
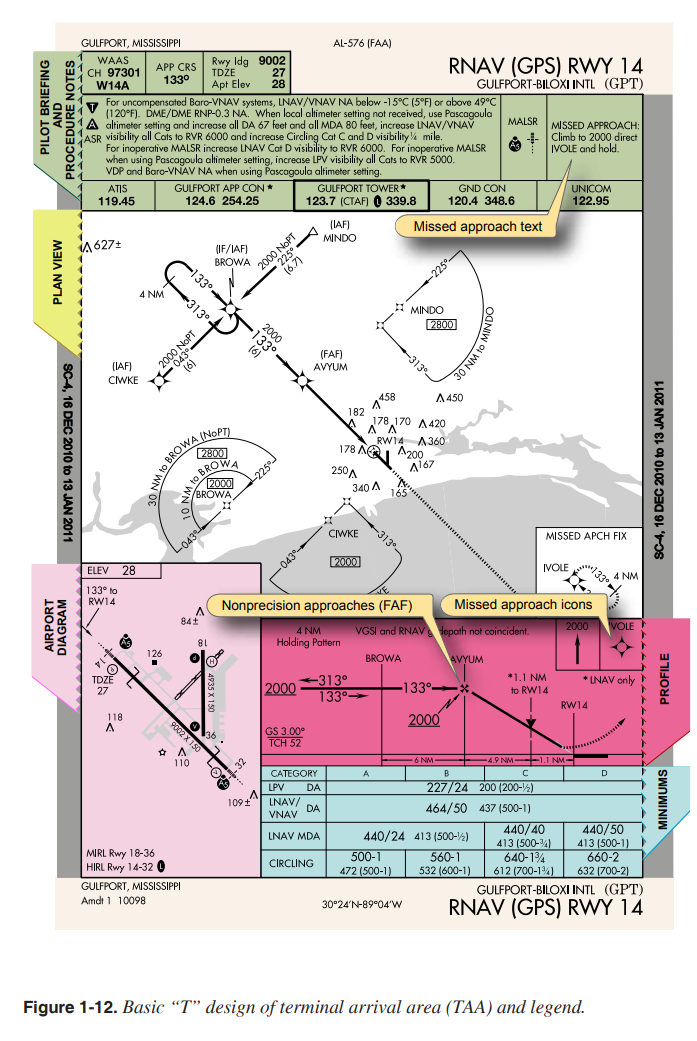
TAA는 “T” structure를 가지고 있는데 이는 보통 접근 항공기에게 NoPT(No Procedure Turn)를 제공한다. [그림 1-12] TAA는 조종사와 관제사로 하여금 en route에서 terminal structure로 향하는 효율적인 경로를 제공한다. TAA의 basic “T”는 활주로 중심선을 MAP(이는 threshold에 위치함), FAF(이는 threshold로부터 5NM에 위치함), 그리고 IF(이는 FAF로부터 5NM에 위치함)와 정렬한다.
(ATP: Highest Spot Elevation은 plan view에 표시된 가장 높은 지형이다.)
높은 en route 고도에서 initial segment altitude로 하강할 수 있도록 hold in lieu of a procedure turn이 제공된다. 이 목적을 위해 holding pattern은 항상 center IAF wapoint에 설정된다. 평행 활주로나 특별 운영 조건에 대해서는 기타 수정이 필요할 수 있다. RNAV chart는 각 TAA를 나타내는 아이콘을 통해 TAA를 표시한다. 이러한 아이콘은 plan view에 표시되며 보통 en route structure로부터 항공기가 입항하는 위치와 연관되도록 정렬된다.
Course Reversal Elements in Plan View and Profile View
course reversal은 세 가지 중 하나로 표시된다: 45°/180° procedure turn, holding pattern in lieu of procedure turn, 혹은 teardrop procedure. 항공기를 intermediate course나 final approach course에 설정하기 위해 반대로 향해야 하는 경우에 이 기동이 필요하다. 절차의 구성 요소들은 plan view와 profile view에 표시된다. 이 기동은 profile view에 지정된 최소 고도 및 거리 내에서 완료되어야 한다. 조종사는 IAP 도중 course reversal과 관련하여 ATC 시설에 협조해야 한다.
Procedure Turns
procedure turn의 화살표는 procedure turn이 수행되는 outbound course를 나타낸다. [그림 1-13] 여기서 45° procedure turn에 대한 heading이 제공된다. 허나 선회를 수행할 지점, 그리고 선회의 유형 및 선회율은 조종사의 재량이다. procedure turn을 위한 선택지로는 45° procedure turn, racetrack pattern, teardrop procedure turn, 혹은 80°/260° course reversal이 있다. plan view에 procedure turn의 화살표가 없다면 해당 절차에 대해 procedure turn이 허가되지 않은 것이다. 장애물 회피 영역 내에 머물기 위해 procedure turn 기동 도중에는 200knots 이하의 지시속도(KIAS)를 준수해야 한다. 일반적인 procedure turn 거리는 10NM이다. Category A 항공기만 운영되는 경우에는 이 값이 최소 5NM로 감소할 수 있으며 고성능 항공기를 수용하기 위해 최대 15NM까지 증가할 수도 있다. procedure turn altitude 이하로 하강하는 것은 항공기가 inbound course에 설정된 이후에 시작된다.

“NoPT” 기호가 있을 경우, final approach를 향한 radar vector가 제공되는 경우, timed approach를 수행하는 경우, 혹은 procedure turn이 인가되지 않은 경우에는 procedure turn이 필요하지 않다. procedure turn이 필요하다 판단하였다면 조종사는 ATC 시설에 교신해야 한다.
Holding in Lieu of Procedure Turn
일부 절차에서는 course reversal을 위해 holding pattern in lieu of a procedure turn이 지정될 수 있다. [그림 1-14] 이 경우 holding pattern은 IF(intermediate fix)나 FAF에 설정된다. profile view에 표시된 holding pattern 거리나 시간을 준수해야 한다. 모든 holding pattern에 대해 규정된 maximum holding airspeed가 여기에도 적용된다. 항공기가 적절한 entry를 수행한 후 inbound course에 설정되었을 때 holding pattern 기동이 완료된다. 항공기가 holding fix로 되돌아오기 전에 접근이 승인되었다면 holding pattern을 더 그리지 않아도 된다. 만약 조종사가 고도를 깎기 위해 위해, 혹은 course를 더 제대로 설정하기 위해 holding pattern을 더 그리기로 결정하였다면 즉시 ATC에 알려야 한다. hold in lieu of a procedure turn 도중 holding pattern을 반드시 따라야 한다(단, final approach를 향하여 RADAR VECTORING이 제공되는 경우, 혹은 접근 경로에 NoPT가 표시된 경우 제외).

Teardrop Procedure
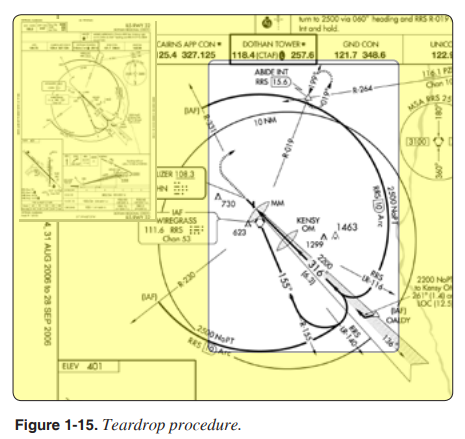
차트에 teardrop procedure turn이 표시되어 있다면 이러한 유형의 절차를 수행해야 한다(단, ATC가 달리 승인한 경우 제외). [그림 1-15] 차트에 게재된 outbound course를 통해 IAF를 떠난 다음 intermediate fix 전에 inbound course를 교차하기 위해 선회한다. 이는 항공기의 방향을 역전시키며 제한된 공역 내에서 상당한 고도를 감소시킨다. intermediate segment가 시작되는 fix가 없는 경우에는 FAF로부터 10NM 이전에 intermediate segment가 시작된다 가정된다. 시설이 공항에 위치하는 경우에는 항공기가 penetration turn을 완료하였을 때 final approach에 놓인 것으로 간주된다. 허나 final approach segment는 시설로부터 10NM 떨어진 final approach course에서 시작된다.
The Profile View
profile view는 측면에서 바라본 절차를 나타내며 수직 접근 경로 고도, heading, 거리, 그리고 fix를 보여준다. [그림 1-10, 11, 그리고 12] 여기에는 procedure turn을 위한 최소 고도 및 최대 거리, 특정 fix에서의 고도, fix들 사이의 거리, 그리고 missed approach 절차가가 포함된다. profile view는 IAP의 해석에 도움을 준다. profile view는 축척에 맞게 그려지지 않는다. [그림 1-10, 11, 12, 16]


GS(glideslope) intercept altitude는 GS을 교차하기 위한 최소 고도이다. 이는 고도 값과 번개 모양 기호로 표시된다. 해당 기호는 정밀 접근에 적용된다. GS가 작동하지 않는 경우에는 해당 고도가 FAF를 교차하기 위한 최소 고도로도 적용된다(단, 달리 규정된 경우 제외). 정밀 접근의 profile view는 GS angle of descent, (TCH)threshold crossing height, 그리고 OM(outer marker)에서의 GS altitude도 표시한다.
비정밀 접근에서는 FAF나 FAP(final approach point)에서 final segment/final descent가 시작된다. FAF는 profile view에 표시된 십자가 기호를 통해 식별된다. [그림 1-11]

FAF가 표시되지 않은 경우에는 항공기가 final approach course에 설정되는 지점이 곧 final approach point가 된다. [그림 1-16]
비정밀 접근 절차의 stepdown fixes는 FAF와 공항 사이에 있다. 이는 항공기가 장애물을 통과한 후에 더 낮은 MDA(minimum descent altitude)로 하강할 수 있도록 만들기 위함이다. stepdown fix는 NAVAID, NAVAID fix, waypoint, 혹은 레이더로 식별될 수 있다. 이는 차트에 해시 마크 선으로 표시된다.

보통 FAF와 MAP 사이에는 하나의 stepdown fix가 존재한다(여러 개가 존재할 수도 있음). 어떤 이유로든 step down fix를 식별할 수 없다면 step down fix에서의 minimum altitude가 접근을 위한 MDA가 된다. 허나 circling minimums가 stepdown fix minimum altitude보다 높다면, 그리고 circling approach를 수행하고 있다면 circling minimums가 적용된다.
VDP(visual descent point)는 nonprecision straight-in approach의 final approach course에 지정된 지점이다. 여기서 시각 참조점이 확인되면 MDA에서 touchdown point를 향하여 강하를 시작할 수 있다. VDP는 접근 차트의 profile view에 “V” 기호로 식별된다. [그림 1-12]
MAP는 접근에 따라 달라진다. ILS의 경우 MAP는 DA/DH(decision altitude/decision height)에 위치한다. 비정밀 접근의 경우에는 세 가지 방법을 통해 MAP가 결정된다: 1) 항법 시설이 공항에 있는 경우에는 fix나 NAVAID를 통해 MAP가 결정됨 2) 항법 시설이 공항으로부터 멀리 있는 경우에는 FAF로부터의 timing을 통해 MAP가 결정됨 3) GPS나 VOR/DME RNAV에서 규정된 waypoints를 통해 MAP가 결정됨. 미리 MAP를 수행하는 경우에는 선회 기동을 수행하기 전에 MDA나 DA/DH 이상으로 MAP를 통과해야 하며 접근 차트대로 IAP를 수행하여 MAP로 향해야 한다(단, ATC가 달리 승인한 경우 제외).
MAP에 대한 설명은 pilot briefing section에 나타나 있다. [그림 1-16] MAP에서 수행되어야 할 행동을 나타내는 아이콘이 profile view에 표시된다. 실패 접근 절차는 곧장 상승하라 지시하거나(예를 들어, “Climb to 2,000”), 혹은 특정 고도를 향해 상승 선회를 수행하라 지시한다(예를 들어, “Climbing right turn to 2,000.”). initial altitude로 곧장 상승한 다음 holding altitude를 향해 상승 선회를 수행하라 지시하는 경우도 있다(예를 들어, “Climb to 900, then climbing right turn to 2,500 direct to ABC VOR and hold.”)
MAP가 facility나 fix에서 체공하라 명시하는 경우에는 plan view에 표시된 missed approach track 및 pattern에 따라 체공해야 한다. ATC가 alternate MAP를 발부할 수도 있다. holding fix를 식별하는 NAVAID나 radial이 pilot briefing section에서 명시된다.
profile view는 접근에 사용되는 minimum altitude, maximum altitude, recommended altitude, 그리고 mandatory block altitude를 표시한다. minimum altitude는 밑줄 친 고도를 통해 표시된다. final approach 도중 차후의 fix에 도달하기 전까지는 해당 고도 이상을 유지해야 한다.

maximum altitude는 윗줄 친 고도를 통해 표시된다. 조종사는 해당 고도 이하를 유지해야 한다.

mandatory altitudes는 윗줄과 밑줄이 쳐진 고도를 통해 표시된다. 조종사는 해당 고도를 유지해야 한다.

recommended altitudes는 권장 고도로 윗줄과 밑줄이 없다. 윗줄과 밑줄이 두 숫자에 걸쳐서 표시되는 경우 이는 mandatory block altitude를 나타낸다. 이때 항공기는 두 숫자의 범위 내에서 고도를 유지해야 한다.

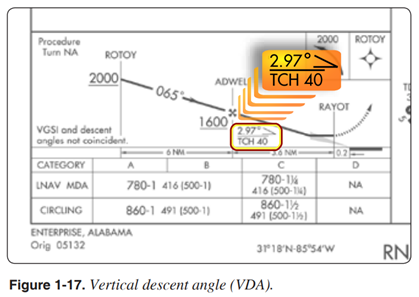
비정밀 접근 차트의 VDA(Vertical Descent Angle)는 FAF나 stepdown fix로부터 TCH를 향하여 stabilized approach를 수행하는데 필요한 정보를 제공한다. [그림 1-17] 조종사는 TPP의 rate of descent table을 통해 특정 하강률을 찾을 수 있다.
Landing Minimums
minimum section은 접근에 필요한 가장 낮은 고도와 시정을 명시한다. nonprecision final segment 내에 fix가 포함된 경우에는 fix가 식별될 수 있는 방법에 따라 두 가지 minimums가 게재될 수 있다. 또한 두 번째 altimeter source가 사용되는 경우에도 두 가지 minimums가 게재될 수 있다. minimums는 final segment의 시작 지점으로부터 활주로나 MAP(둘 중 이후에 도달하는 지점)까지 장애물 회피를 제공한다. 주간 운영 위한 minimum과 야간 운영을 위한 minimum은 동일하게 적용된다(단, pilot briefing의 notes section에 다른 minimums가 명시된 경우 제외). circling minimums는 조종사가 적절한 보호 구역 내에 있을 때 장애물 회피를 제공한다. [그림 1-18]
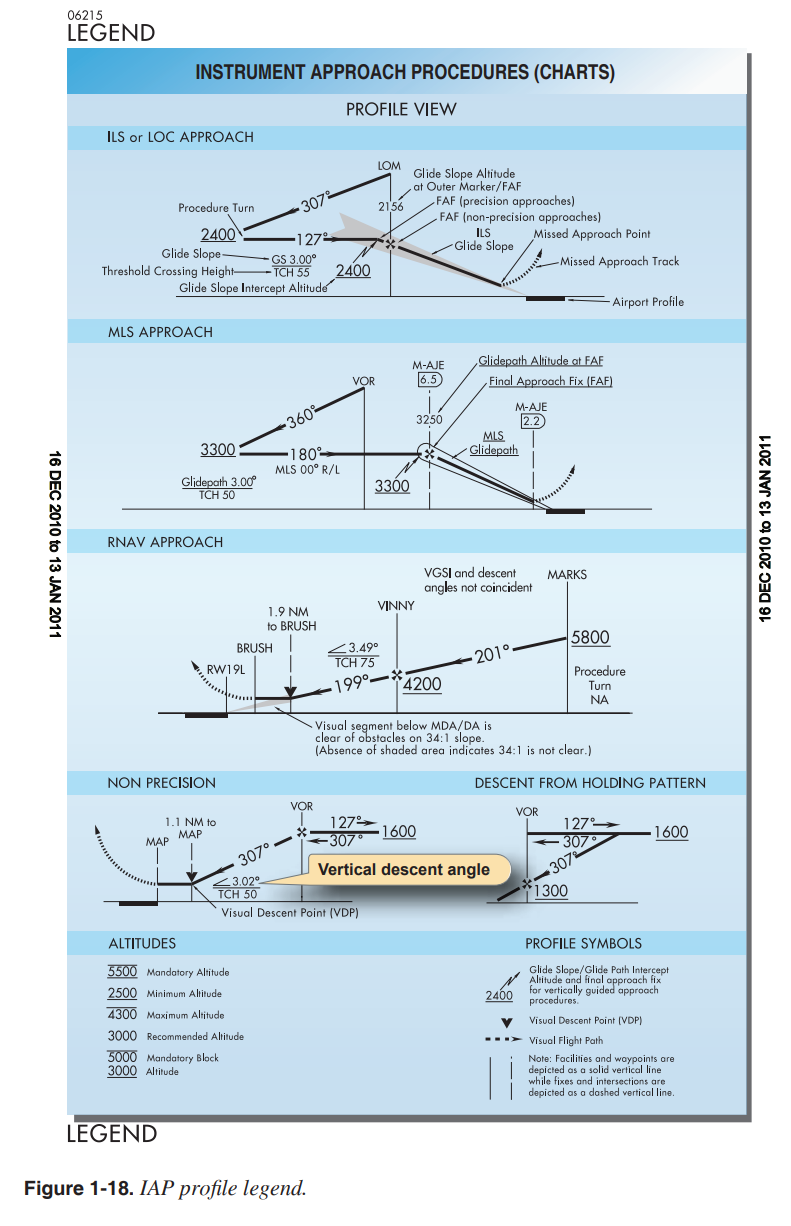
(ATP: 정밀 접근의 경우 glide slope intercept altitude와 함께 표시된 번개 모양의 화살표가 final approach fix를 나타낸다.)
(ATP: shaded fan이 표시된 경우 MDA/DA 미만에서의 visual segment에서 34:1 slope가 장애물 회피를 제공한다. shaded fan이 없는 경우에는 34:1 slope가 장애물 회피를 제공하지 못한다.)
minimums는 다양한 approach category에 대해 지정된다. 이는 maximum certified gross landing weight에서 착륙 외장일 때의 실속 속도에 1.3을 곱한 값에 기초한다. category에 대한 속도 범위의 상한선을 초과해야 하는 경우에는 다음 category의 minimums를 사용해야 한다. 예를 들어 category A에 속하지만 91 knots 이상으로 circling to land를 수행하는 항공기는 approach category B의 minimums를 사용해야 한다. [그림 1-19]
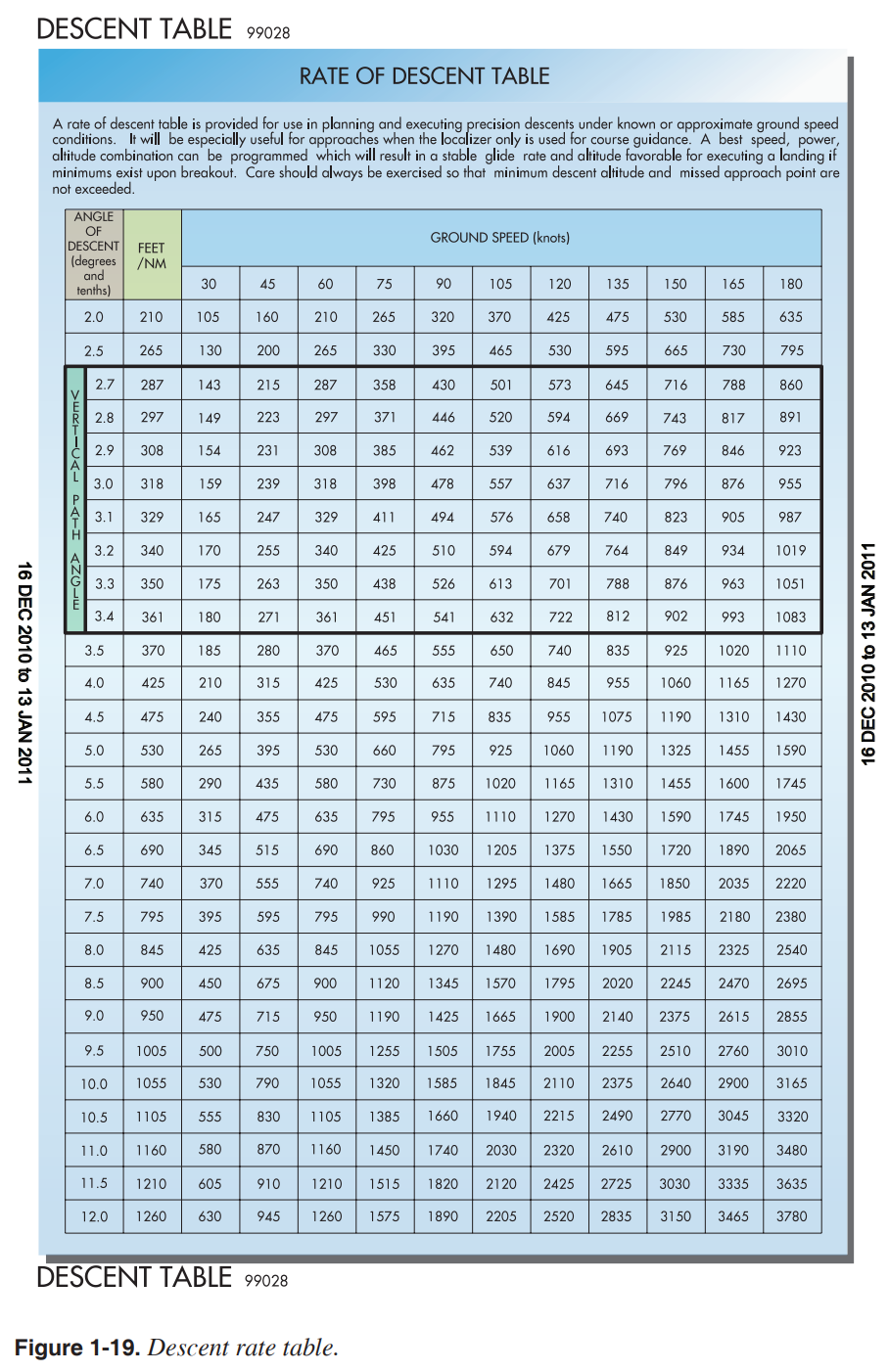

straight-in과 circling을 위한 minimums가 각 aircraft category의 아래에 표시된다. [그림 1-19] category 별 minimums 사이에 구분선이 없다면 해당 minimums가 두 개 이상의 category에 적용된다.
정밀 접근을 위한 minimum approach altitude와 비정밀 접근을 위한 minimum approach altitude는 서로 다르다. 정밀 접근은 DH를 사용하며 HAT(height above threshold elevation)를 기준으로 한다. 반면 비정밀 접근은 MDA를 사용하며 "feet MSL"을 기준으로 한다(또한 MDA는 straight-in approach의 경우 HAT를 기준으로, 혹은 circling approach의 경우 HAA[height above airport]를 기준으로 하기도 함). AeroNav Products 차트에서 괄호에 나열된 값들은 군사 운영을 위한 것이며 민간 항공에서는 사용되지 않는다.
(ATP: ATIS의 ceiling은 AGL을 기준으로 한다. 따라서 ceiling은 접근 차트의 HAT와 관련된다.)
시정 값은 statute miles나 RVR로 제공된다. RVR(runway visual range)은 transmissometer로부터 활주로를 따라 측정된 수평 거리를 나타낸다. RVR은 high intensity runway lights나 그 외 대상의 시각적 대비 중 더 높은 visual range를 산출하는 것을 기준으로 한다. RVR은 경사 거리가 아닌 수평 거리이며 특정 활주로의 minimums를 결정할 때 우세 시정을 대신하여 사용된다. RVR이 1마일 미만일 때에는 100ft 단위로 표시된다(즉, “24”는 2,400ft의 RVR임). [그림 1-19과 1-20]
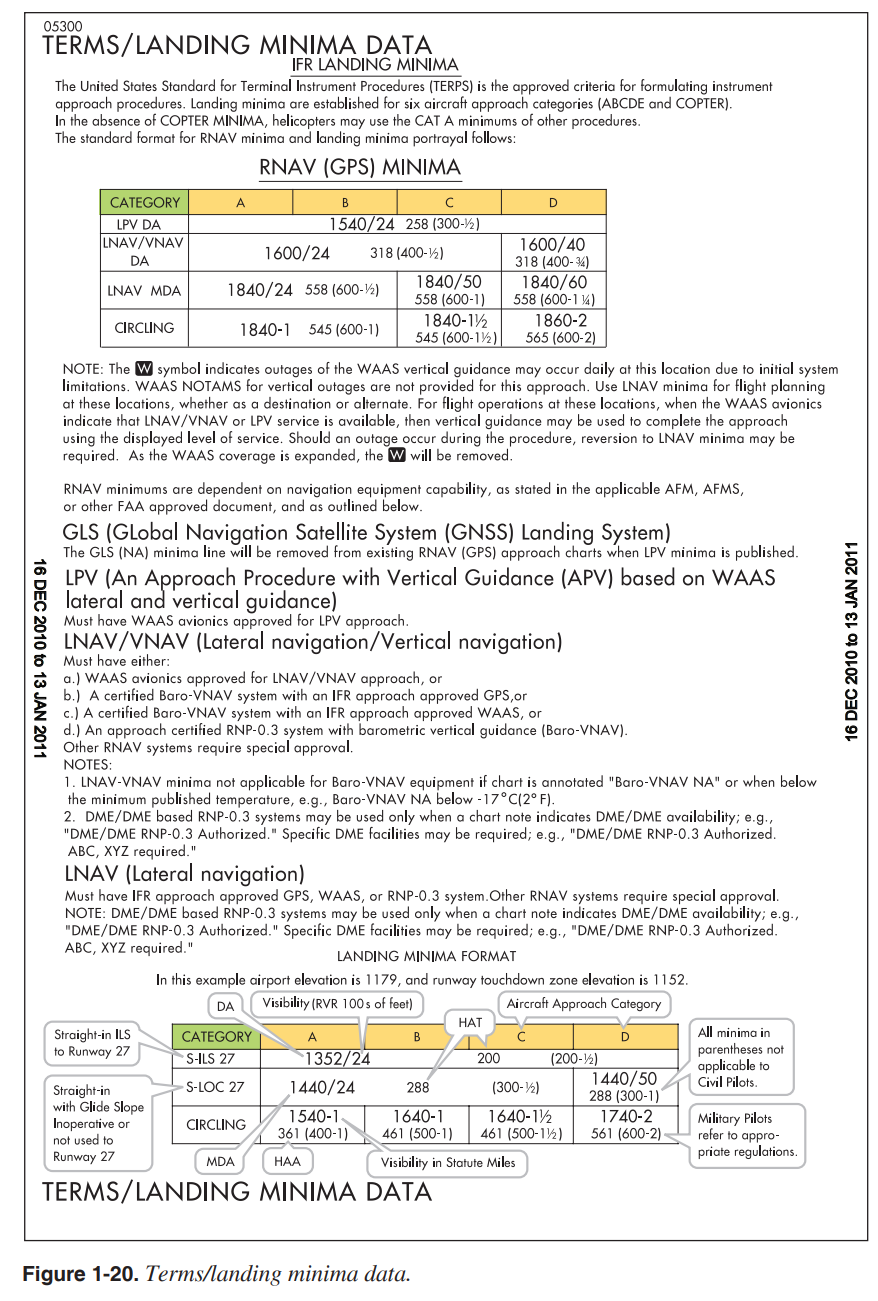

시정 값은 minimums section의 DA/DH나 MDA 뒤에 표시된다. statute miles로 시정이 표시된 경우에는 고도 값, 하이픈(-), 그리고 시정 값이 표시된다. 예를 들어 530-1은 “530 feet MSL”과 1마일의 시정을 나타낸다. 이는 접근에 대한 descent minimum이다. RVR 값은 슬래시(/)를 통해 minimum altitude와 분리된다. 예를 들어 “1065/24”는 1,065ft MSL과 2,400ft RVR을 나타낸다. 만약 절차에 대해 RVR이 규정되어 있으나 이를 사용할 수 없다면 conversion table을 통해 이와 동등한 시정을 얻어야 한다. [그림 1-20]
교체비행장이 필요하다면 standard IFR alternate minimums를 적용한다. 정밀 접근 절차에는 600ft ceiling과 2 statue miles visibility가 필요하다. 비정밀 접근 절차에는 800ft ceiling과 2 statue miles visibility가 필요하다. pilot briefing의 notes section에 흰색 “A”가 표시된 검은색 삼각형이 있다면 이는 공항에 대해 non-standard IFR alternate가 존재함을 의미한다.

만약 “A” 뒤에 “NA”가 있다면 alternate minimums가 인가되지 않는다.

Airport Sketch/Airport Diagram
비행에 앞서 조종사는 착륙 예정 공항과 교체비행장의 레이아웃을 연구해야 한다. 비행 계획 도중 출항 공항에서의 지상 활주 절차와 입항 공항에서의 착륙 절차를 연구한다. 예상되는 지상 활주 경로를 airport diagram이나 taxi chart와 대조 확인해야 하며 지상 활주 경로를 따라 위치하는 복잡한 교차로에 주의를 기울여야 한다. 조종사는 지상 활주 경로상 중요한 시점과 위치를 식별해야 한다.
공항의 레이아웃과 특정 절차를 알면 ATC 지시/절차들이 안전하게 수행될 수 있다. 공항의 레이아웃과 절차를 알지 못하면 runway incursion이 발생할 수 있다. 이러한 상황 인식 부족은 불필요한 사고를 야기한다. 허나 이는 적절한 비행 계획을 통해 예방될 수 있다. ATC instructions가 준수되고 있는지 확인하기 위해 airport diagram을 통해 항공기 진행 상황을 참조하는 것이 runway incursion을 줄이는 핵심 절차 중 하나이다. 이를 위해 조종사는 비행 전에 모든 절차를 연구하는 시간을 가져야 한다.
차트 하단의 airport sketch는 유용한 기능들을 포함한다. 일부 대형 공항의 IAP는 전체 페이지를 airport diagram으로 사용한다. 활주로 방향, 등화, final approach bearings, 공항 등대, 그리고 장애물에 대한 정보는 비행의 최종 단계에 놓인 조종사에게 안내를 제공한다. 그림 1-21은 airport diagram/airport sketch의 legend를 보여준다.
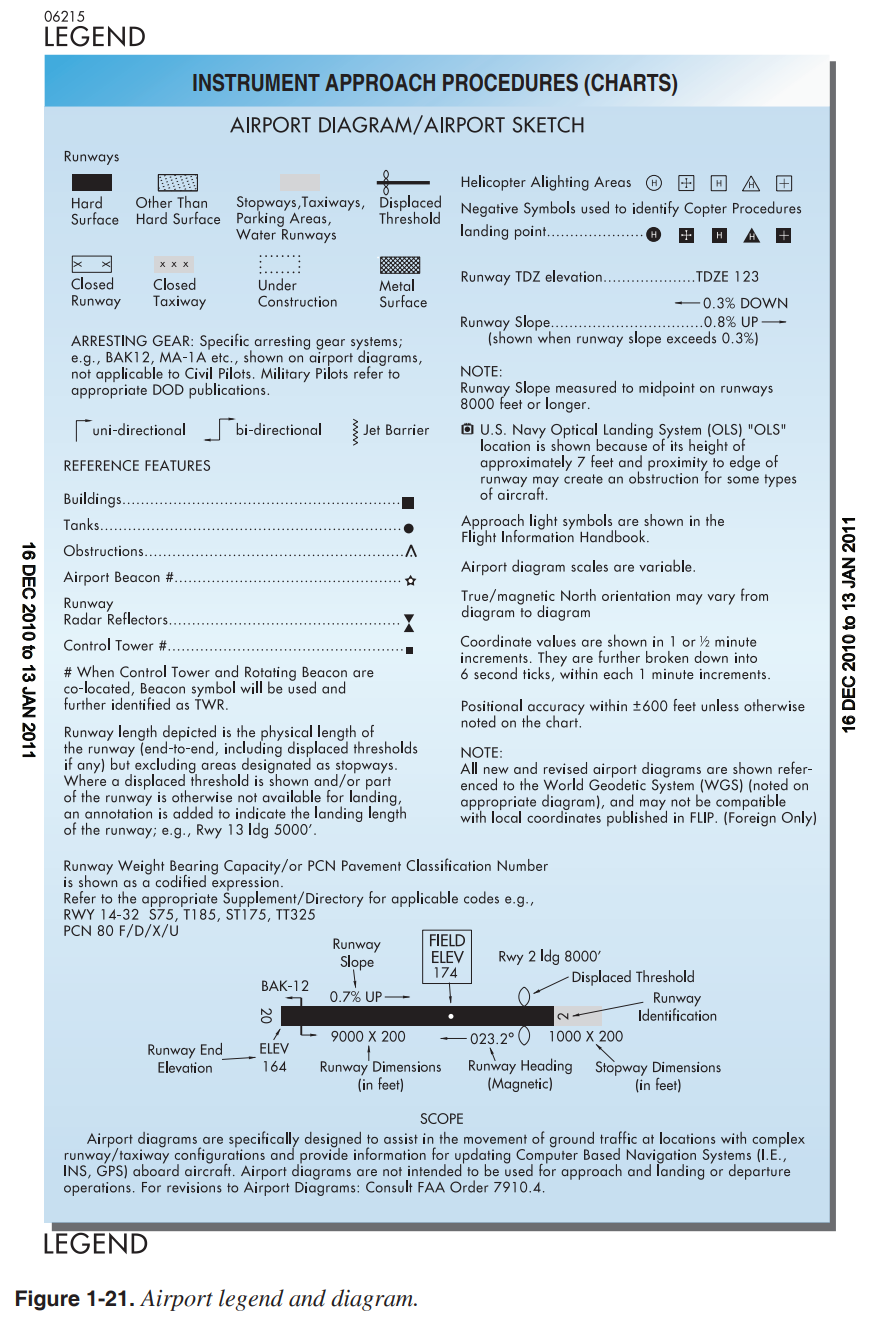

공항 표고는 airport sketch의 왼쪽 상단에 표시된다. TDZE(touchdown zone elevation)이 approach end에 표시된다. TDZE이란 활주로 시작 지점과 3,000ft 지점 사이에서 가장 높은 표고를 의미한다.
해당하는 경우에는 airport sketch의 아래에 time and speed table이 표시된다. 표에는 FAF ~ MAP까지의 거리와 해당 거리를 통과하는데 필요한 시간(groundspeed 기준)이 표시된다.
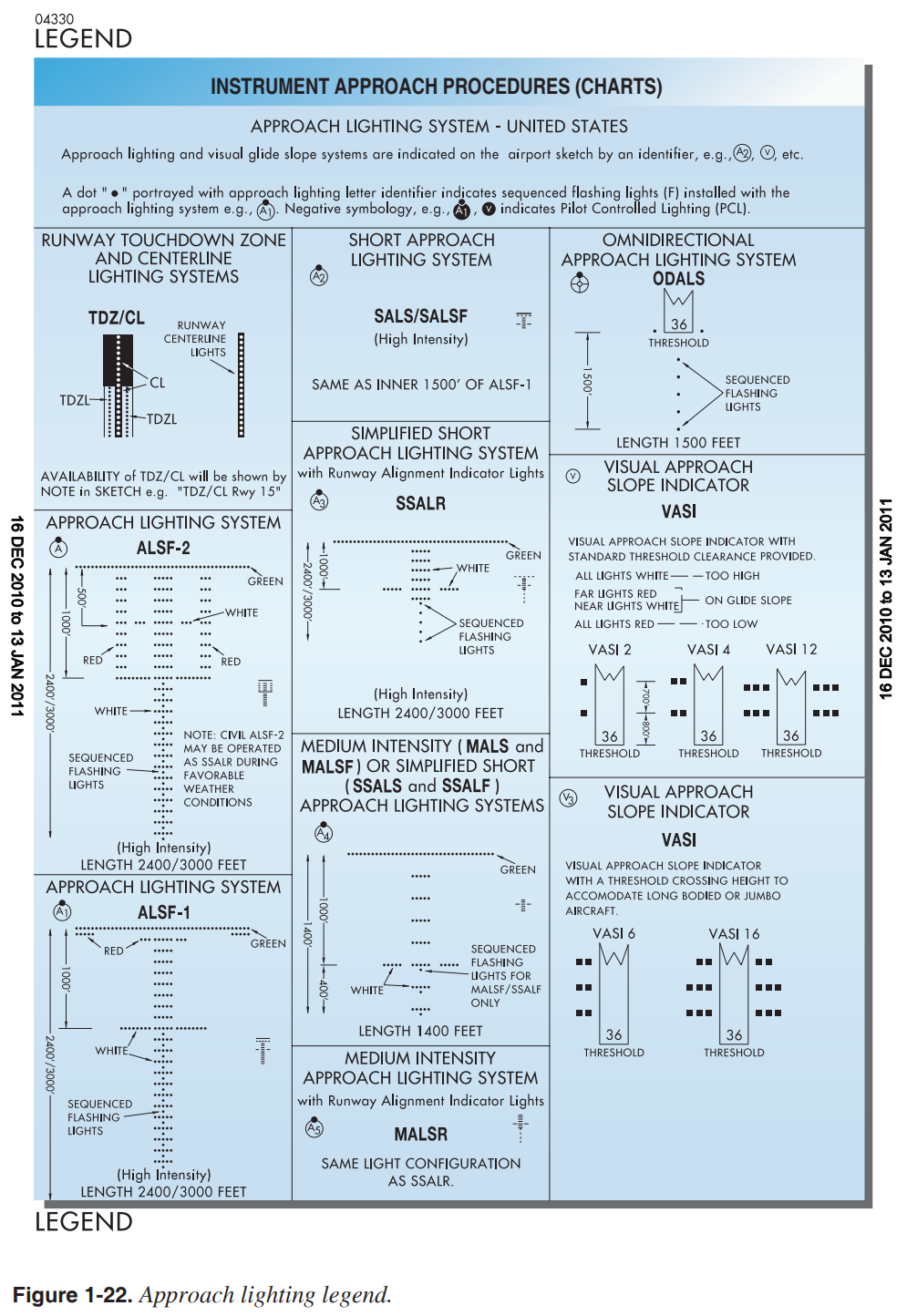
approach lighting system과 visual approach light가 airport sketch에 표시된다. PCL(pilot-controlled lighting)이 존재하는 경우에는 흰색 “V”가 검은색 원에 표시된다.

runway lighting aids(예를 들어 REIL, HIRL)와 RCL(runway centerline lighting)도 표시된다. [그림 1-22]

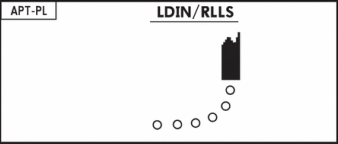
(ATP: Runway Lead-in Light System은 하나 이상의 점멸등으로 구성된다. 지형, 장애물, 혹은 noise abatement procedures에 문제가 존재하는 경우에는 LDIN이 직선 접근 경로나 곡선 접근 경로를 따라서 시각 안내를 제공한다.)
airport diagram에 활주로는 검정색으로, 그리고 유도로와 주기장은 회색 음영으로 표시된다. 이 외의 활주로 특징들(예를 들어 활주로 번호, 활주로 크기, magnetic heading, displaced threshold, arresting gear, 이용 가능한 길이, 그리고 경사)도 표시된다.
Inoperative Components
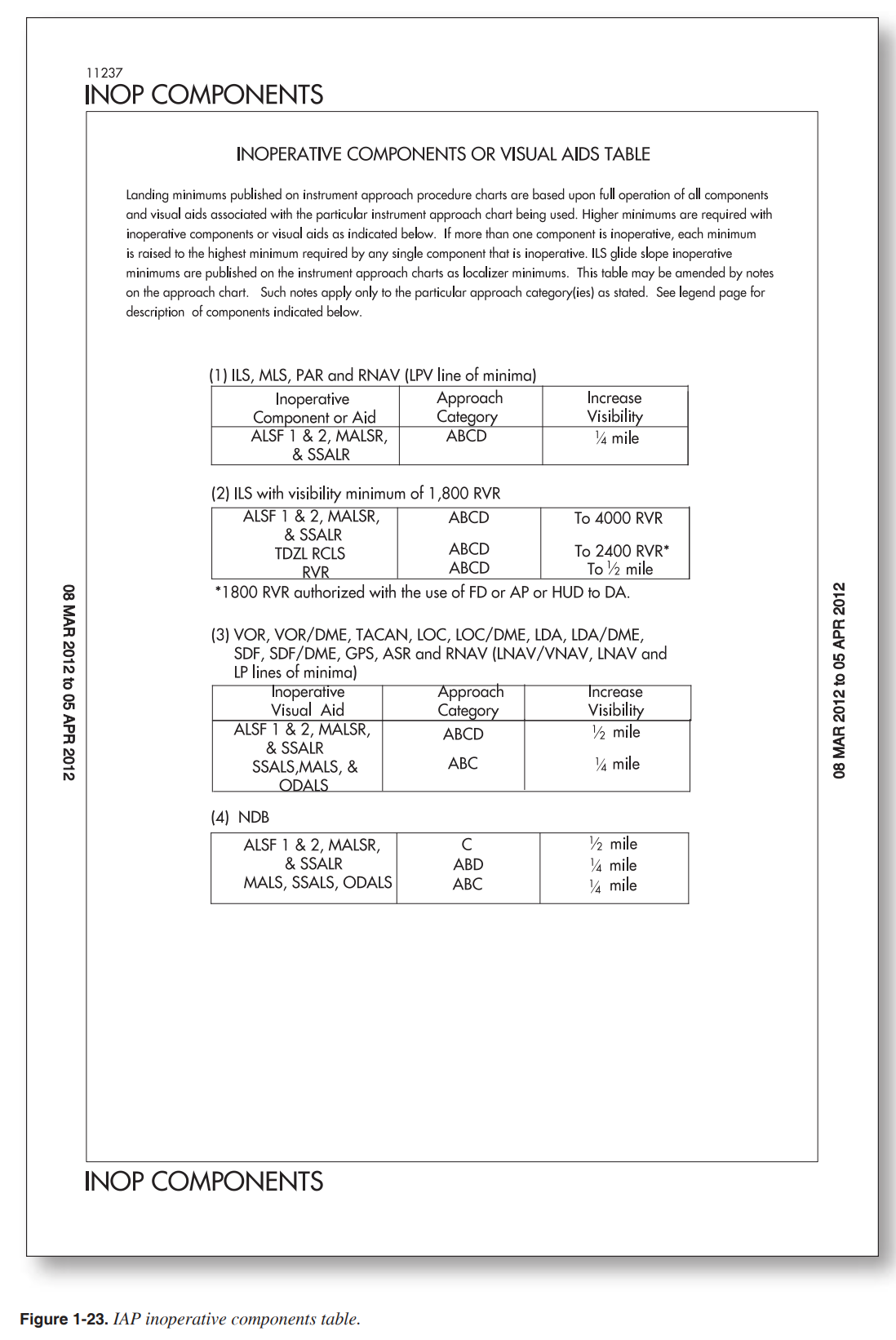
특정 절차는 inoperative components가 존재하여도 비행할할 수 있다. 예를 들어 MALSR(= MALS with RAIL. Medium Intensity Approach Lighting System with Runway Alignment Indicator Lights)이 작동하지 않는다 해도 minimum visibility가 1/4마일 증가한다면 ILS approach를 수행할 수 있다. [그림 1-23]
RNAV Instrument Approach Charts
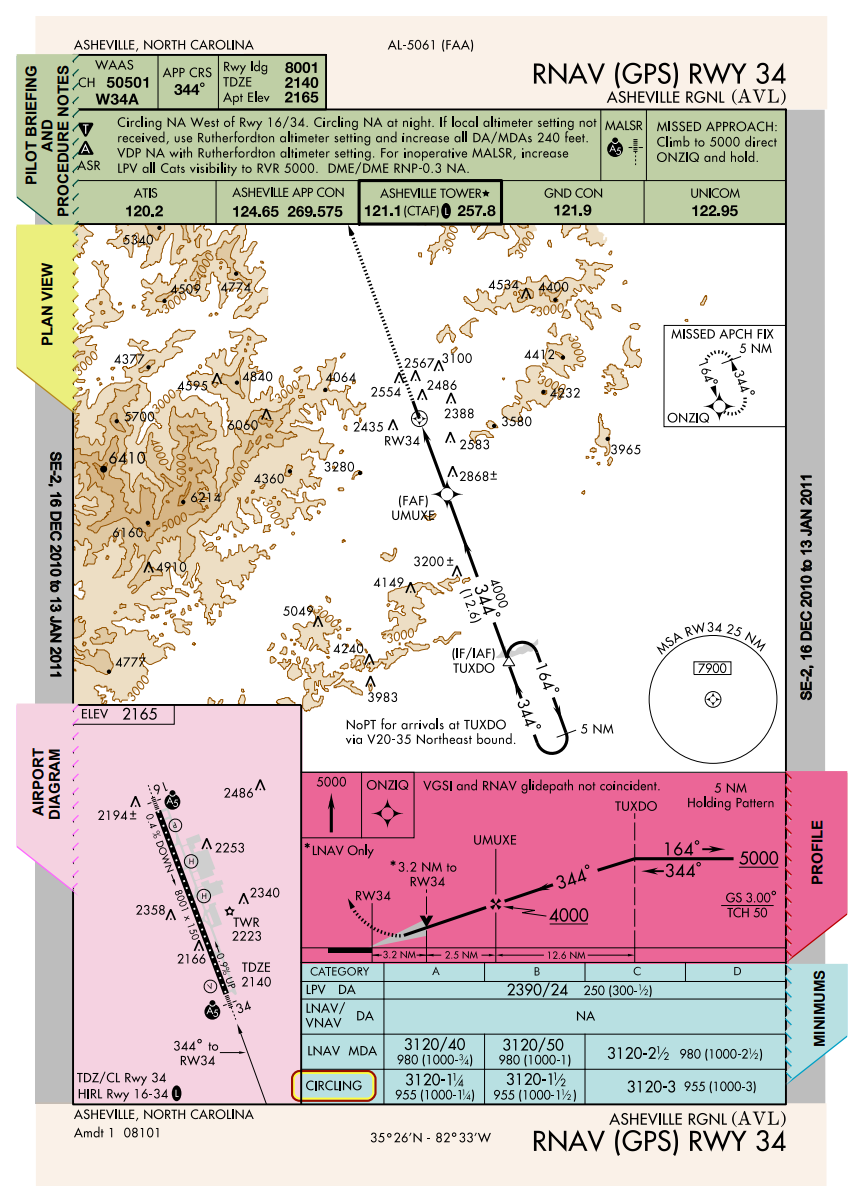
접근 차트의 불필요한 중복을 방지하기 위해 unaugmented GPS와 WAAS(Wide Area Augmentation System)에 대한 approach minimums가 LNAV/VNAV(lateral navigation/vertical navigation)와 함께 게재된다. TPP approach chart books의 minima notes에 따라 다른 유형의 장비로 접근을 수행하도록 승인될 수도 있다. 접근의 각 구간에 대한 RNP(required navigational performance) 값을 충족하는 항공기는 “RNAV RWY XX”라는 제목의 접근 차트를 사용할 수 있다. [그림 1-24]


차트에는 4개의 approach minimums가 포함될 수 있다: LPV, LNAV/VNAV, LNAV, 그리고 circling. LNAV/VNAV는 수평 안내와 수직 안내를 제공하는 계기 접근 방식으로 BARO VNAV(barometric vertical navigation)와 유사한 integrity limit을 가진다.
final approach stepdown fix를 포함하는 RNAV procedures 또한 RNAV라는 제목의 별도 차트에 게재될 수 있다. GPS procedures가 새로운 제목으로 개정되는 동안 RNAV chart와 GPS chart가 모두 게재된다. RNAV procedure에 대한 ATC clearance를 받으면 조종사는 항공기에 대해 증명된 landing minimums를 무엇이든 사용할 수 있다.
차트가 개정되면서 용어들이 약간 변경되었다:
1. DA가 DH를 대체한다. DA는 altitude(이는 MSL 연관)와 height(이는 AGL과 연관)에 대한 국제 협약을 준수한다. 수직 안내를 제공하는 다른 유형의 IAP에도 DA가 게재될 예정이다. DA라는 단어를 통해 조종사는 차트의 descent profile이 DA(착륙을 위한 시각 참조점이 발견되지 못하면 실패 접근을 수행하는 지점)까지 비행된다는 것을 알 수 있다. final approach에서 missed approach로 전환하는 동안 DA 아래로 잠깐 하강할 수 있도록 장애물 간격이 제공된다. 선회를 수행하기 전에 최소한 runway threshold waypoint나 MAP까지는 final approach course를 따라가면서 missed approach instructions를 수행해야 한다.
2. MDA는 LNAV 절차와 circling 절차를 위해서만 사용된다.
3. TCH는 예부터 정밀 접근 도중 시단에서의 GS 높이로 사용되었다. LNAV/VNAV minimums와 RNAV descent angles가 게재됨에 따라 TCH는 시단에서의 glidepath 높이에도 적용된다. TCH는 보통 30 ~ 50ft이다.
minima 형식이 약간 변경된다:
1. RNAV IAP의 각 line of minima는 해당 RNAV 시스템을 반영하도록 이름이 지정된다(예를 들어 LPV, LNAV/VNAV, 그리고 LNAV). circling minima 또한 제공된다.
2. minima title box는 minimum altitude의 특성을 나타낸다. 예를 들어 DA는 수직 안내를 지원하는 minima line에 게재되고 MDA는 수평 안내만을 지원하는 minima line에 게재된다.
3. 두 개 이상의 시스템들이 동일한 minima를 공유한다면는 각 minima line이 별도로 표시된다.
'Instrument Flying Handbook(2012) > 1: National Airspace System' 카테고리의 다른 글
| (1) Introduction (0) | 2023.03.22 |
|---|---|
| (2) IFR En Route Charts (0) | 2023.03.22 |
| (3) New Technologies (0) | 2023.03.22 |
| (4) Terminal Procedures Publications (1) | 2023.03.22 |
| (5) Instrument Approach Procedure Charts (0) | 2023.03.22 |