Vision in Flight
모든 감각들 중 시각은 안전한 비행을 위해 가장 중요하다. 비행 도중 인지되는 것들은 대부분 시각적이다. 허나 눈은 착각, 그리고 맹점과 같은 제한들을 받을 수 있다. 눈에 대해, 그리고 눈이 기능하는 방법에 대해 더 많이 이해할수록 시력을 더 효과적으로 사용할 수 있으며 잠재적 문제를 보완하는 것이 쉬워진다.
눈은 카메라와 같은 기능을 한다. 그 구조는 조리개, 렌즈, 초점을 맞추기 위한 메커니즘, 그리고 이미지를 등록하기 위한 표면을 포함한다. 빛은 각막을 통해 들어와 수정체를 통과하고, 망막 위에 떨어진다. 망막은 빛에 민감한 세포들을 포함하고 있는데, 이는 빛 에너지를 전기적 자극으로 변환시킨다. 전기적 자극은 신경을 통해 뇌로 전달된다. 뇌는 이미지를 형성하기 위해 전기적 신호를 판독한다. 눈에는 두 종류의 광수용체가 있다: 원추세포와 간상세포. [그림 17-12]
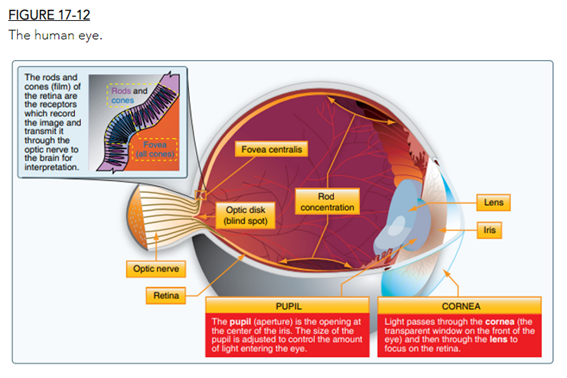
원추세포는 모든 색깔의 식별을 담당한다. 원추세포는 망막 곳곳에 존재하지만 망막 뒤쪽에 위치한 시야의 중심에 집중되어 있다. 중심와(fovea)라 불리는 작은 구덩이는 거의 모든 광수용체가 원추세포로 이루어져있다. 이 영역에서 거의 대부분의 “looking”이 발생한다(시야의 중심으로 디테일, 색 민감도, 그리고 해상도가 가장 높음).
원추세포는 밝은 빛 조건에서 미세한 세부 사항과 색상을 감지하는데 매우 적합하다. 허나 간상세포는 움직임을 더 잘 감지하며 희미한 빛에서 시력을 제공한다. 간상세포는 색을 구별할 수는 없지만 낮은 조도에서 매우 민감하다. 허나 많은 양의 빛은 간상세포를 전멸시켜 어둠에 다시 적응하는데 오래 걸리게 만든다는 문제가 있다. 시야의 중심에 놓인 중심와에는 원추세포가 많지만 간상세포는 전혀 없다. 따라서 낮은 조도에서는 시야의 중심이 민감하지 않다. 허나 중심와에서 멀어질수록 간상세포가 많아지고 야간 시력의 대부분을 제공한다.
Vision Types
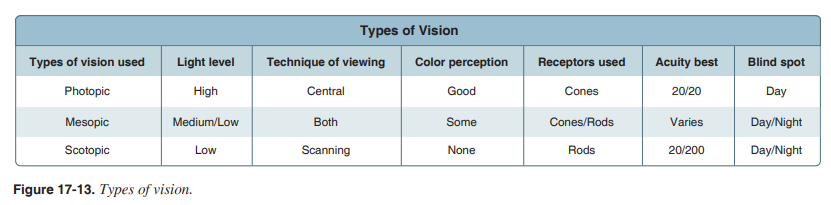
시력에는 세 가지 유형이 있다: photopic, mesopic, 그리고 scotopic. 각 유형들은 서로 다른 감각 자극, 혹은 주위 빛 조건에서 기능한다. [그림 17-13]
Photopic Vision
photopic vision은 색깔을 보는, 그리고 미세한 세부사항을 분석하는 기능을 제공한다(20/20 이상). 허나 이는 조명이 좋은 경우에만 가능하다. photopic vision은 주간일 때, 혹은 높은 수준의 인공조명이 존재할 때 경험된다. 원추세포는 눈의 중심와에 집중되어 있으며 밝은 빛 조건에서 시력을 담당한다. [그림 17-12] 밝은 빛으로 인해 로돕신이 탈색되어 간상세포의 효과는 떨어진다.
Mesopic Vision
mesopic vision은 간상세포와 원추세포의 조합을 통해 이루어진다. 이는 새벽, 황혼, 그리고 보름달 도중 경험된다. 빛이 감소함에 따라 시력(visual acuity)이 점점 감소한다. 그리고 원추세포의 효과가 점점 떨어지기 때문에 색상 인지가 변화한다. mespoic viewing 기간은 가장 위험한 때로 여겨진다. 저조도 조건에서는 원추세포의 민감도가 감소하므로 조종사는 off-center vision과 적절한 스캐닝 기법을 사용해야 한다.
Scotopic Vision
scotopic vision은 조명이 낮은 경우에 경험된다. 원추세포의 효과가 줄어들어 세부 사항의 해상도가 떨어진다. 시력은 20/200 이하로 떨어진다. 그리고 20ft 거리에서 시력검사표의 “E”보다 큰 물체만을 볼 수 있게 된다. 즉, 주간에 200ft 거리에서 보이던 물체를 야간에 보기 위해선 20ft가 필요하다. scotopic vision을 사용할 경우 색을 인지하지 못하며 중심시에 night blind spot이 발생한다.
Central Blind Spot
시신경이 망막과 연결되는 영역을 시신경 원판(optic disk)라 부른다. 이 영역에는 원추세포와 간상세포가 전혀 없다. 따라서 양 쪽 눈은 이 지점에서 아무것도 볼 수 없다. [그림 17-14] 이를 맹점(blind spot)이라 부른다. 정상적인 쌍안시(양 쪽 눈이 동시에 사용되는 것)의 경우 이는 문제가 되지 않는다. 왜냐하면 물체가 양 쪽 눈의 맹점에 동시에 존재할 수 없기 때문이다. 반면 한 쪽 눈의 시야가 물체(windshield divider, 혹은 다른 항공기)에 의해 가려지는 경우 시각적 목표가 반대쪽 눈의 맹점에 떨어져 탐지되지 않을 수 있다.

그림 17-15는 눈의 맹점을 보여주는 극단적 예시이다.
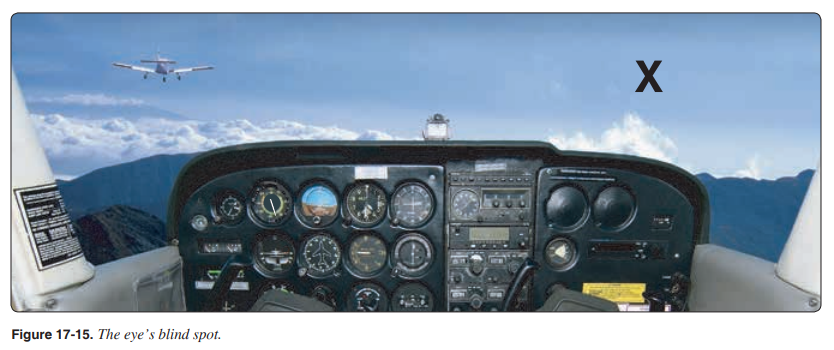
1. 이 그림을 팔 길이로 붙잡는다.
2. 손이나 그 외 평평한 물체로 왼쪽 눈을 완전히 가린다.
3. 우측 눈을 통해 왼쪽에 놓인 비행기를 똑바로 바라본다. 주변시로 오른쪽에 놓인 검은색 X가 보일 것이다.
4. 비행기를 계속 바라보면서 그림을 눈에 더 가까이 이동시킨다.
5. 그림이 16 ~ 18인치 떨어져 있을 때 검은색 X가 완전히 사라져야 한다. 왜냐하면 이는 오른쪽 눈의 맹점에 놓이기 때문이다. (검은색 X가 사라지거나 다시 나타나는 동안 오른쪽 눈을 움직이려는 유혹을 참으라. 계속 비행기를 바라보라.)
6. 계속 비행기를 바라보면서 그림을 몇 인치 더 가까이 이동시킬 경우 검은색 X가 다시 시야에 들어올 것이다.
7. 그림을 앞뒤로 움직일 때 검은색 X가 사라지는 간격이 있다. 이는 맹점의 정도를 보여준다.
8. 이번에는 오른쪽 눈을 가리고 왼쪽 눈으로 검은색 X를 바라본다. 그림을 가까이 이동시키면 비행기가 사라질 것이다.
맹점을 확인하는 다른 방법으론 보름달이 있는 밤에 이와 유사한 실험을 하는 것이다. 왼쪽 눈을 가리고 오른쪽 눈으로 보름달을 바라본다. 오른쪽 눈을 천천히 왼쪽으로(그리고 약간 위나 아래로) 움직인다. 머지않아 보름달 주위의 후광만이 보이게 될 것이다. 이는 보름달이 사라진 것처럼 보일 것이다.
Empty-Field Myopia
항공기 바깥에 특별히 초점을 맞출 것이 없는 경우(예를 들어 구름 위를 비행할 때, 혹은 연무를 통과할 때) empty-field myopia가 발생한다. 이는 눈의 긴장을 풀게 만들며 10 ~ 30ft의 편안한 초점 거리를 찾게 만든다. 이는 조종사에게 있어 보지 않고 보는 것을 의미하며 매우 위험하다. 멀리 떨어진 빛(설령 희미하더라도)을 찾은 다음 여기에 집중하는 것이 empty-field myopia를 방지하는데 도움을 제공한다.
Night Vision
야간 비행을 수행해야 할 여러 가지 좋은 이유들이 있다. 허나 조종사는 야간 비행의 위험성이 주간과는 다르다는 것을, 그리고 그 위험성이 주간보다 몇 배는 더 높다는 것을 명심해야 한다. [그림 17-16] 야간 비행 기법을 교육받은 조종사는 이러한 위험들을 줄일 수 있으며 업무를 능숙하게 해낼 수 있다.
Night Blind Spot
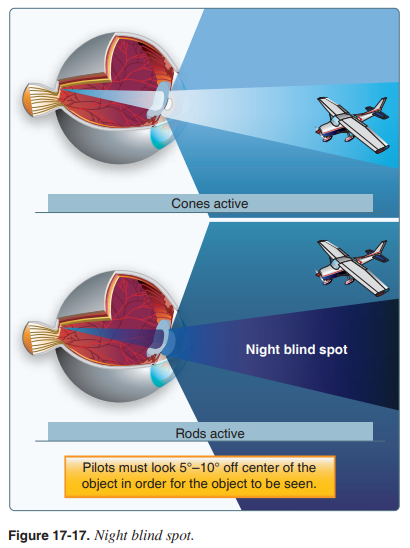
어둠에 완전히 적응될 경우 간상세포는 원추세포보다 빛에 10,000배 더 민감해져서 야간 시력을 위한 주요 수용체가 된다. 원추세포는 중심와 근처에 집중되어 있으므로 간상세포 또한 주변시의 많은 부분을 담당한다. 중심와에 집중된 원추세포들은 시야의 중심시에 night blind spot을 만들 수 있다. 야간에 물체를 선명하게 보기 위해선 간상세포가 이미지에 노출되어야 한다. 이는 물체를 시야 중심에서 5 ~ 10도 벗어나게 바라봄으로서 이루어질 수 있다. 이는 어두운 방에서 희미한 빛을 통해 실험될 수 있다. 빛을 정확히 바라볼 경우 빛이 흐려지거나, 혹은 완전히 사라진다. 반면 중앙을 살짝 벗어나서 바라볼 경우 빛이 더 선명해지고 밝아진다.
물체를 직접 바라볼 경우 이미지는 주로 중심와에 집중된다. 야간에는 원추세포가 덜 민감해지고 간상세포다 더 민감해짐에 따라 시야 중심에 놓인 물체를 보는 능력이 떨어진다. 중심을 벗어나도록 바라보는 것은 이러한 night blind spot을 보완하는데 도움을 제공할 수 있다. 야간에는 선명도와 색감이 손실될 뿐만 아니라 깊이 감각, 그리고 크기 판단력도 상실될 수 있다. [그림 17-17]
Dark Adaptation
암순응은 눈이 어두운 환경에 적응하는 것이다. 암순응에 걸리는 시간은 방금 떠난 환경에서의 빛의 양에 따라 달라진다. 밝은 곳에서 어두운 곳으로 이동할 때 걸리는 암순응 시간은 어둑한 곳에서 어두운 곳으로 이동할 때 걸리는 암순응 시간보다 더 오래 걸린다.
원추세포는 빛의 강도 변화에 빠르게 적응하나 간상세포는 그렇지 아니하다. 간상세포가 어둠에 완전히 적응하는데 약 30분이 걸릴 수 있다. 그러나 밝은 빛은 암순응을 완전히 파괴할 수 있으며 암순응 과정이 다시 반복되는 동안 야간 시력이 심하게 손상된다.
Night Vision Protection
암순응 과정을 돕기 위해, 그리고 암순응 된 눈을 유지하기 위해 몇 가지 일들을 할 수 있다. 조종사가 야간 시력을 보호하기 위해 취할 수 있는 조치들 중 일부는 다음과 같다.
Sunglasses
야간 비행 예정되어 있는 경우 밝은 햇빛에 노출될 때에 neutral density(N-15) sunglasses를 사용해야 한다. 이는 암순응 속도를 증가시키며 야간 시력 민감도를 향상시킨다.
Oxygen Supply
야간 시력은 간상세포의 최적 기능과 민감도에 따라 달라진다. 간상세포에 산소가 부족해지면 그 민감도가 현저히 감소한다(저산소증). 선명한 시력을 위해선 상당한 산소가 필요하다(특히 야간인 경우). 보조 산소가 없다면 야간 시력은 4,000ft 이상의 기압 고도에서 어느 정도 감소한다. 고도가 증가함에 따라 산소가 감소하여 야간 시력이 저하된다. 피로는 문제를 더욱 악화시킨다. 야간에 12,000ft를 비행할 경우 조종사는 시력 요소들이 사라진 것을, 혹은 초점이 맞지 않은 것을 확인할 수 있다. 사라진 시력 요소들은 디지털 이미지의 누락된 픽셀들과 유사하다. 반면 초점이 맞지 않는 시력은 흐릿해진다.
저산소성 저산소증(hypoxic hypoxia)을 경험하는 경우 단순히 낮은 고도로 하강한다 하여 시력이 개선되지 않을 수 있다. 예를 들어 8,000ft에서 12,000ft로 30분 동안 상승한 후 8,000ft로 하강한다 하여 문제가 해결되는 것은 아니다. 심지어 시력은 한 시간 이상 회복되지 않을 수도 있다. 따라서 고도와 피로는 조종사의 시력에 지대한 영향을 미친다는 것을 기억해야 한다.
High Intensity Lighting
비행 도중 높은 강도의 조명들이 놓인 구역을 마주한 경우 항공기를 돌린 다음 해당 구역의 주위를 비행한다. 이는 많은 양의 빛이 한꺼번에 눈에 노출되지 않도록 해준다. 가능하다면 밝게 빛나는 건물들이 빽빽이 들어찬 구역의 상공을 피하도록 경로를 계획하라.
Flightdeck Lighting
조종실 조명은 최대한 낮게 유지되어야 한다. 원하는 비행 고도에 도달한 후 조종사는 비행 조건에 적응할 수 있는 시간을 가져야 한다. 여기에는 계기 조명들의 재조정, 그리고 바깥 참조물에 대한 방향 조정이 포함된다. 이 기간 도중 최적의 암순응이 달성될 때까지 야간 시력을 계속 향상시켜야 한다. 지도, 차트, 그리고 체크리스트를 사용해야 하는 경우 흐릿한 백색 손전등을 사용한다. 본인의 눈, 혹은 다른 승무원의 눈에 손전등을 비추는 것을 피한다.
Airfield Precautions
아래에 나열된 것들은 야간 비행을 더 안전하게 만들기 위해, 그리고 야간 시력을 보호하기 위해 취할 수 있는 몇 가지 예방 조치이다.
• 공항 등화가 최저 강도로 감소되어야 한다.
• 정비사들은 전조등과 손전등을 이용한 등화관제를 연습해야 한다.
• 조명이 가장 적은 공항 상 위치에 항공기를 배치한다.
• 고속도로와 주택가를 벗어난 접근 및 출항 경로를 선택한다. 이곳의 조명들이 야간 시력을 손상시킬 수 있기 때문이다.
Self-Imposed Stress
많은 self-imposed stressors가 야간 시력을 제한할 수 있다. 조종사들은 self-imposed stressors를 유발할 수 있는 요인들을 이해함으로써 이러한 유형의 스트레스를 조절할 수 있다. 이러한 요인들 중 일부는 다음과 같다. [그림 17-20]
Drugs
약물은 시력을 심하게 저하시킬 수 있다. 질병을 앓는 조종사들은 비행 중 어떤 약물을 복용하는 것이 적절한지를 위해 AME와, 혹은 항공 군의관과 상의해야 한다.
Exhaustion
피로에 시달리는 조종사들은 정신적으로 기민하지 못하며 즉각적인 조치가 필요한 상황에 대해 천천히 반응할 것이다. 피로에 지친 조종사들은 전체적인 요건을 고려하기보단 상황의 한 측면에 집중하는 경향이 있다. 적절한 스캐닝 기법을 사용하기보다는 계기에 고정되거나, 혹은 멀티태스킹을 하기 보다는 한 눈을 팔 수 있다.
Poor Physical Conditioning
조종사는 규칙적인 운동을 수행해야 한다. 신체적으로 건강한 사람들이 비행 도중 덜 피로하며 더 좋은 야간 스캐닝 효율을 가진다. 하지만 너무 많은 운동을 하면 비행을 수행하기에 너무 피곤해질 수 있다.
Alcohol
알코올은 조정력과 판단력을 모두 손상시킨다. 그 결과 알코올의 영향을 받는 조종사들은 적절한 야간 시력 기법을 적용하지 못한다. 이들은 스캐닝 기법을 간과하고 물체를 멍하니 응시한다. 알코올 섭취량은 야간 시력에 영향을 미치는 정도를 결정한다. 알코올의 효과는 오래 지속되며 숙취 또한 스캐닝 효율성을 손상시킬 수 있다.
Tobacco
모든 self-imposed stressors 중 흡연이 야간 시감도(visual sensitivity)를 가장 감소시킨다. 흡연은 적혈구의 헤모글로빈이 운반하는 일산화탄소의 양을 크기 증가시킨다. 이는 혈액의 산소 결합 능력을 감소시켜 혈중 산소 운반량을 감소시킨다. 일산화탄소 중독으로 인한 저산소증은 주변시, 그리고 암순응에 영향을 미친다. 이 결과는 높은 고도에서의 저산소증과 동일하다. 담배 3개를 연속으로 피는 것, 혹은 24시간 내에 20 ~ 30개의 담배를 피는 것은 헤모글로빈 용량의 8 ~ 10%를 포화시킬 수 있다. 흡연자들은 해수면에서 야간 시력의 20%를 잃는데, 이는 5,000ft의 physiological altitude와 동일하다.
Hypoglycemia and Nutritional Deficiency
밥을 안 먹거나 미루는 것은 저혈당을 야기할 수 있으며 이는 야간 비행 능력을 악화시킨다. 낮은 혈당 수치는 위 수축, 주의 산만, 습관 패턴의 변화, 그리고 주의 지속 시간의 단축을 초래할 수 있다. 비타민 A의 불충분한 섭취 또한 야간 시력을 손상시킬 수 있다. 비타민 A가 많음 음식으로는 계란, 버터, 치즈, 간, 살구, 복숭아, 당근, 호박, 시금치, 완두콩, 그리고 대부분의 야채들을 포함한다. 많은 양의 비타민 A가 야간 시력을 증가시켜주지는 않는다. 허나 비타민 A의 부족은 야간 시력을 확실히 악화시킨다.
Distance Estimation and Depth Perception
거리 추정과 깊이 감각에 영향을 미치는 메커니즘 및 단서들에 대한 지식은 야간에 거리를 판단하는데 도움을 제공한다. 이러한 단서들은 단안(monocular), 혹은 쌍안(binocular)일 수 있다. 거리 추정과 깊이 감각에 도움을 주는 단안 단서(monocular cues)들로는 motion parallax, geometric perspective, retinal image size, 그리고 aerial perspective를 포함한다.
Motion Parallax
운동 시차(motion parallax)란 풍경을 가로질러 이동하는 관찰자가 정지해 있는 물체를 바라보았을 때 해당 물체의 겉보기 운동을 말한다. 조종사가 항공기 밖을 이동 방향에 수직으로 바라볼 경우 가까이 있는 물체는 뒤로 움직이는 것처럼 보인다. 반면 멀리 있는 물체는 가만히 있는 것처럼 보인다. 이러한 겉보기 운동의 속도는 관찰자와 물체 사이의 거리에 따라 달라진다.
Geometric Perspective
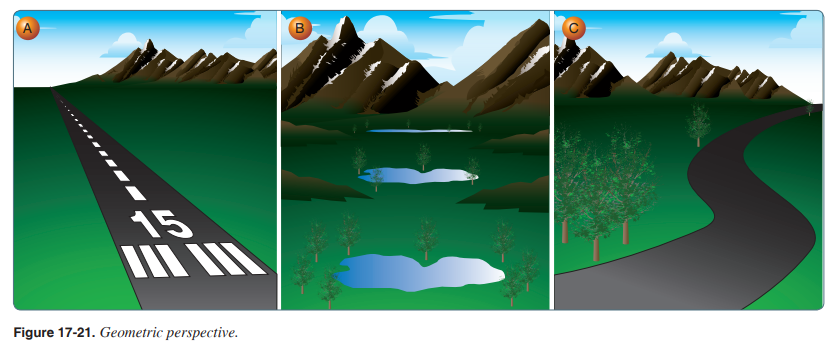
물체는 서로 다른 거리 및 각도에서 바라보았을 때 서로 다른 모양을 가질 수 있다. 기하학적 원근법(geometric perspective)에는 linear perspective, apparent foreshortening, 그리고 vertical position in the field가 포함된다.
• Linear perspective – 평행한 선들(예를 들어 활주로 등화, 전력선, 그리고 철도 선로)은 관측자로부터의 거리가 멀어질수록 수렴하는 경향이 있다. [그림 17-21A]
• Apparent foreshortening – 물체나 지형지물을 멀리서 볼 경우 타원형으로 보인다. [그림 17-21B]
• Vertical position in the field – 관찰자로부터 멀리 떨어진 물체나 지형지물은 가까운 것보다 수평선상에 더 높게 나타난다. [그림 17-21C]
Aerial Perspective
물체의 선명도, 그리고 물체에 의해 만들어지는 그림자는 뇌에 의해 지각되어 거리를 추정하는 단서로 사용된다. 관찰자와 물체 사이의 거리가 가까울수록 색깔이나 음영의 미묘한 차이가 더 분명해진다. 허나 거리가 증가할수록 이러한 구별이 흐릿해질 수 있다. 물체의 세부 사항이나 질감 또한 마찬가지이다. 관찰자와 물체 사이의 거리가 멀어질수록 물체의 세부 사항이 덜 분명해진다. 야간 비행 도중 기억해야 할 또 다른 중요한 사실은 모든 물체들이 광원으로부터 그림자를 드리운다는 것이다. 그림자가 드리워지는 방향은 광원의 위치에 따라 달라진다. 물체의 그림자가 관찰자를 향해 드리워졌다면 물체가 광원보다 더 가깝다.
Binocular Cues
양안 단서(binocular cues)는 물체에 대한 양쪽 눈의 서로 다른 시야 각도에 의존한다. 양안 단서는 양쪽 눈의 시야 각도가 명백한 차이를 만들 수 있을 정도로 물체가 충분히 가까운 경우에만 유용하다. 비행 도중 조종석 외부의 거리는 대부분 너무 커서 양안 단서가 거의 무의미하다. 또한 양안 단서는 단안 단서보다 더욱 잠재의식적 수준으로, 그리고 자동으로 수행된다.
Night Vision Illusions
야간에 흔히 발생하는 시각적 착각들이 있다. 이러한 착각들을 피하기 위해선 이것들을 예상 및 인지하는 것이 가장 좋다.
Autokinesis
자동 운동(autokinesis)은 어두운 배경에 놓인 한 점의 빛을 몇 초 이상 응시할 경우 발생한다. 잠시 후 이 빛이 움직이는 것처럼 보인다. 빛의 명백한 움직임은 약 8 ~ 10초 안에 시작된다. 이러한 착각을 방지하기 위해선 가지각색의 거리에 놓인 물체들에 초점을 맞추어 하나의 빛에 고정되는 것을 피한다. 이러한 착각은 시각적 스캐닝을 수행함으로써, 빛의 개수를 늘림으로써, 혹은 빛의 광도를 변화시킴으로써 감소될 수 있다. 세 가지 해결책 중 가장 중요한 것은 시각적 스캐닝이다. 빛을 10초 이상 응시해서는 안 된다.
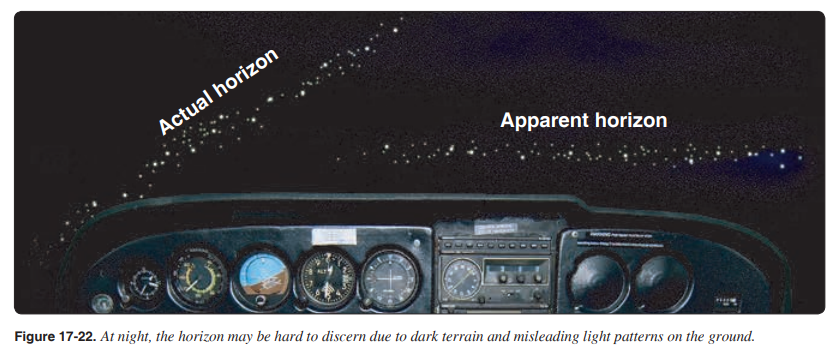
False Horizon
자연 수평선이 가려진 경우, 혹은 잘 보이지 않는 경우 false horizon이 발생할 수 있다. 이는 밝은 별들과 도시의 빛들을 혼동할 때 발생할 수 있다. 또한 이는 바다나 큰 호수의 해안선을 향하여 비행할 때에도 발생할 수 있다. 수면의 상대적 캄캄함으로 인해 해안선을 따라 놓인 빛들이 하늘의 별들로 오인될 수 있다. [그림 17-22]
Reversible Perspective Illusion
야간에 다른 항적이 항공기에 접근하고 있을 때 해당 항적이 멀어지는 것처럼 보일 수 있다. 이러한 착각은 종종 항공기가 다른 항적의 경로와 평행하게 비행할 때 발생한다. 비행 방향을 결정하기 위해 조종사는 항적의 등화를, 그리고 수평선에 대한 항적의 위치를 확인해야 한다. 만약 등화의 강도가 증가한다면 항적이 접근 중이다. 만약 등화의 강도가 감소한다면 항적은 멀어지는 중이다.
Size-Distance Illusion
이러한 착각은 밝기가 증가, 혹은 감소하는 빛을 바라볼 때 발생한다. 조종사는 빛이 가까워지고 있다고, 혹은 멀어지고 있다고 해석할 수 있다.
Fascination (Fixation)
이러한 착각은 조종사들이 방향정위를 위한 단서들을 무시하고 하나의 목표나 물체에 주의를 고정할 때 발생한다. 학생 조종사들은 계기에 집중할 때, 혹은 착륙을 시도할 때 이러한 경향이 있다. 그들은 하나의 업무에 집중하여 주변에서 무슨 일이 일어나고 있는지를 보지 못하게 된다. 이는 야간에 특히 위험할 수 있다. 왜냐하면 야간에는 항공기가 지면에 가까워지는 속도를 결정하기 어려우며 이러한 상황을 수정할 시간이 아주 적을 수 있기 때문이다.
Flicker Vertigo
초당 4 ~ 20회로 깜박이는 빛은 불쾌한, 그리고 위태로운 반응을 일으킬 수 있다. 여기에는 메스꺼움, 구토, 그리고 현기증과 같은 상태가 포함될 수 있다. 경우에 따라 경련과 인사불성 또한 발생할 수 있다. 야간에 올바른 스캐닝 기법을 사용할 경우 명멸 현훈(flicker vertigo)을 방지할 수 있다.
Night Landing Illusions
많은 유형의 착륙 착각이 발생한다. 야간에 특색이 없는 지형의 상공을 비행할 경우 낮은 접근을 수행하려는 경향이 있다. 시야를 흐릿하게 만드는 모든 요소들(예를 들어 비, 연무, 혹은 어두운 활주로) 또한 낮은 접근을 유발할 수 있다. 밝은 빛, 가파른 주변 지형, 그리고 넓은 활주로는 낮아 보이는 착각을 유발하여 높은 접근으로 이어질 수 있다. 도로나 고속도를 따라 일정한 간격으로 배치된 조명들은 활주로 등화처럼 보일 수 있다. 또한 조종사들은 움직이는 기차의 조명들을 활주로, 혹은 접근 등화로 착각하기도 한다. 밝은 활주로나 접근 등화는 항공기가 활주로와 가까워 보이는 착각을 유발할 수 있다(특히 주변지형을 비추는 조명이 거의 없는 곳에서).
야간 비행을 수행하기 전에 비행하고자 하는 지역의 위험 요인을 아는 것이 좋다. 해당 지역을 공부하고 야간에 문제가 될 수 있는 지역을 항행하는 방법을 숙지한다. 예를 들어 수면 근처 지역들은 대부분 낮은 구름이나 안개에 의해 흐릿해질 수 있다. 이러한 상황을 대처하기 위해 비행 전에 계획을 세우는 것이 중요하다. 밤에 비행할 경로를 주간에 비행한 다음 야간에 사용할 최저 고도를 결정한다. 만약 기상으로 인해 해당 고도를 유지하는 것이 불가능할 경우 기상 조건이 더 나은 교체비행장에 착륙한다. 우연에 기대어 일이 잘 풀리기를 바라기보다는 더 안전한 대안을 항상 고려하라.
야간에 비행하는 조종사는 FAA가 요구하는 고도 및 시간 외에도 보조 산소를 고려해야 한다(특히 IFR인 경우, 조종사가 흡연자인 경우, 혹은 조종사의 신체 상태가 좋지 못한 경우).
Enhanced Night Vision Systems
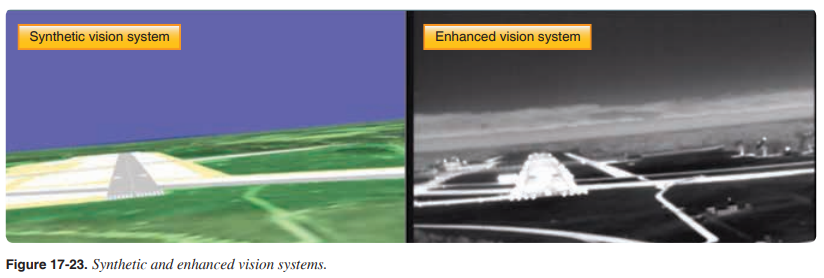
SVS(Synthetic Vision Systems)와 EFVS(Enhanced Flight Vision Systems)는 야간에 비행 안전을 향상시킬 수 있는 시스템이다. 이 기술들은 빠르게 발전하여 점점 더 많이 사용되고 있다. [그림 17-23]
Synthetic Vision System
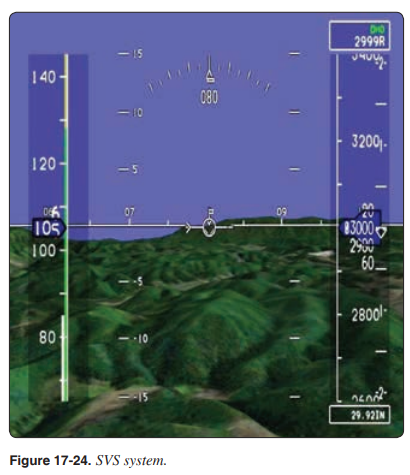
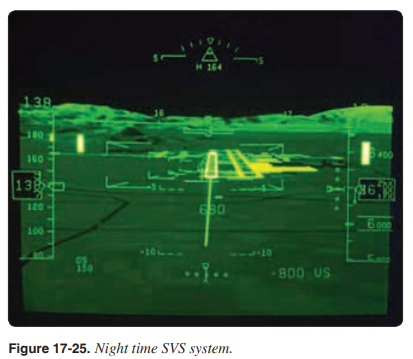
SVS는 외부 지형의 synthetic vision image를 조종사에게 나타내기 위한 전자적 수단이다. [그림 17-24] 이는 EFVS처럼 실시간 이미지를 나타내지는 않는다. EFVS와 달리 SVS는 지형 및 장애물 데이터베이스, 정교한 navigation solution, 그리고 화면을 필요로 한다. 지형 이미지는 SVS에 저장된 DEM(Digital Elevation Model) 데이터를 기반으로 한다. synthetic terrain/vision image는 모든 시정 조건 도중 특정 지형(예를 들어 지형, 장애물, 활주로, 그리고 랜드마크)과 관련된 공간상 위치에 대한 조종사의 인식을 향상시키기 위한 것이다. 이는 비행의 중요한 단계(예를 들어 이륙, 접근, 그리고 착륙)에서 매우 유용하다. [그림 17-25] 접근 도중 설령 시정이 좋지 않다 하여도 화면에 digital terrain image가 남아있다는 것이 SVS의 장점이다.
SVS image는 head-down display나 head-up display(HUD)에 표시될 수 있다(허나 SVS는 현재 head-down displays에서만 인증된다). synthetic image를 HUD에 표시하기 위한 개발이 현재 진행 중이며 SVS와 EFVS가 생성하는 실시간 센서 이미지를 결합하려는 노력 또한 진행 중이다. 이러한 시스템을 Combined Vision Systems라 부른다. 현재 SVS는 상황 인식을 보조하기 위한 장치로 인증된다. 허나 FAA와 항공 산업은 SVS가 특정 저시정 조건에서 operational credit으로 사용될 수 있도록 운영 개념과 감항 기준을 규정하려 노력하고 있다. SVS의 향후 개선 사항으로는 항적 정보를 표시하기 위해 ADS-B를 통합하는 것이 포함될 수 있다.
Enhanced Flight Vision System
EV(Enhanced Vision), 혹은 EFVS(Enhanced Flight Vision System)는 외부 광경을 제공하기 위해 imaging sensor(예를 들어 FLIR(Forward-Looking InfraRed, 혹은 MMWR(millimeter wave radar)를 사용하는 전자적 수단이다. 2004년에 14 CFR Part 91, section 91.175는 다음과 같이 개정되었다: Category II나 Category III 이외의 straight-in instrument approach procedures를 수행하는 운영자가 HUD에 표시되는 EFVS를 사용하는 경우 DH(decision height)나 MDA(minimum descent altitude) 미만을 운영할 수 있다. 이는 EV 장비에 대한 “operational credit”을 제공한다. SV에 대해서는 이러한 credit이 존재하지 않는다.
'PHAK(2023) > 17: Aeromedical Factors' 카테고리의 다른 글
| (1) Introduction (0) | 2023.11.14 |
|---|---|
| (2) Obtaining a Medical Certificate (1) | 2023.11.14 |
| (3) Health and Physiological Factors Affecting Pilot Performance (1) | 2023.11.14 |
| (5) Chapter Summary (0) | 2023.11.14 |