Gyroscopic Flight Instruments
몇몇 비행계기들은 그 작동을 위해 자이로스코프의 특성을 이용한다. 자이로스코프를 포함하는 가장 일반적인 계기는 turn coordinator, heading indicator, 그리고 attitude indicator이다. 이러한 계기들의 작동 방법을 이해하려면 계기의 동력 시스템, 자이로의 원리, 그리고 각 계기의 작동 원리에 대한 지식이 필요하다.
Gyroscopic Principles
모든 회전 물체는 자이로스코프 특성을 나타낸다. 이러한 특성을 활용하도록 설계 및 장착된 wheel(혹은 rotor)를 자이로스코프라 부른다. 계기 자이로의 두 가지 중요한 설계 특징은 높은 밀도, 그리고 높은 회전 속도이다.
mounting에는 일반적으로 두 가지 유형이 있다. 사용되는 유형은 자이로의 특성에 따라 달라진다. freely(혹은 universally) mounted gyroscope는 무게 중심에 대해 어느 방향으로든 자유롭게 회전할 수 있다. 이 wheel은 세 개의 자유면을 가지고 있다. wheel(혹은 rotor)은 base를 기준으로 어느 평면에서든 자유롭게 회전할 수 있다. 그리고 gyro wheel이 정지한 상태에서 제자리에 있도록 균형이 잡혀 있다. restricted(혹은 semi-rigidly) mounted gyroscopes는 자유면 중 하나가 base를 기준으로 고정된 자이로스코프이다.
자이로스코프는 두 가지 기본 특성을 가진다: 공간강성, 그리고 세차.
Rigidity in Space
공간강성은 자이로스코프가 회전하는 평면에서 고정된 위치를 유지하는 원리를 말한다. 공간강성의 한 예시는 자전거 바퀴에 있다. 자전거 바퀴의 속도가 증가함에 따라 자전거 바퀴는 회전면에서 더 안정적이게 된다. 이는 자전거가 저속에서는 불안정하지만 조종이 쉬운, 그리고 고속에서는 안정적이지만 조종이 어려운 이유이다.
이러한 wheel을 gimbal rings에 장착함으로써 자이로는 어느 방향으로든 자유롭게 회전할 수 있다. 따라서 gimbal rings가 기울어지거나, 비틀어지거나, 혹은 그 외의 방법으로 움직일 경우 자이로는 원래 회전하던 평면에 남아 있다. [그림 8-18]

Precession
세차는 deflective force에 반응하여 자이로를 기울이거나 회전시키는 것이다. 이 힘에 대한 반응은 힘이 작용한 지점에서 발생하지 않는다. 오히려 이는 회전 방향으로부터 90도 이후인 지점에서 발생한다. 이 원리를 통해 자이로는 방향 변화에 의해 생성되는 압력의 양을 감지하여 선회율을 결정할 수 있다. 자이로가 precess 하는 비율은 rotor의 속도에 반비례하고 deflective force에 비례한다.
세차는 자전거가 선회할 수 있도록 바퀴에 작용한다. 정상 속도로 주행하는 도중 원하는 방향으로 핸들을 돌릴 필요가 없다. 라이더는 단순히 원하는 방향으로 몸을 기울인다. 자전거의 오른쪽에서 바라보았을 때 바퀴는 시계방향으로 회전한다. 따라서 라이더가 몸을 왼쪽으로 기울이면 바퀴의 윗부분에서 왼쪽으로 힘이 가해진다. 이 힘은 회전 방향의 90도 지점에서 작용하여 타이어의 앞부분에 힘을 가해 자전거를 왼쪽으로 움직이게 만드는 효과가 있다. 저속에서는 천천히 회전하는 자이로의 불안정성 때문에 핸들을 회전시킬 필요가 있다.
세차는 일부 계기에서 몇 가지 사소한 오류를 발생시킬 수 있다. [그림 8-19] 세차는 베어링 마찰 등을 통해 자이로가 회전면으로부터 이동하게 만들 수 있다. 특정 계기들은 비행 도중 수정을 필요로 할 수 있다(예를 들어 heading indicator).

Sources of Power
일부 항공기에서는 모든 자이로가 진공, 압력, 혹은 전기로 작동한다. 다른 항공기에서는 진공 시스템이나 압력 시스템이 heading indicators와 attitude indicators에 전원을 제공하는 반면 전기 시스템은 turn coordinator에 전원을 공급한다. 대부분의 항공기는 하나의 전원에 이상이 발생할 경우 적어도 하나의 bank 정보를 사용할 수 있도록 최소 두 가지의 전원을 가진다. 진공, 혹은 압력 시스템은 rotor를 고속으로 회전시키기 위해 rotor vanes에 공기 흐름을 끌어당김으로써 자이로를 회전시킨다. 계기 작동에 필요한 진공, 혹은 압력은 다양하지만 이는 일반적으로 4.5"Hg ~ 5.5"Hg이다.
자이로의 진공 공급원 중 하나는 vane-type engine-driven pump이다. 이는 엔진의 accessory case에 장착되어 있다. 펌프의 능력은 자이로의 수에 따라 항공기마다 다르다.
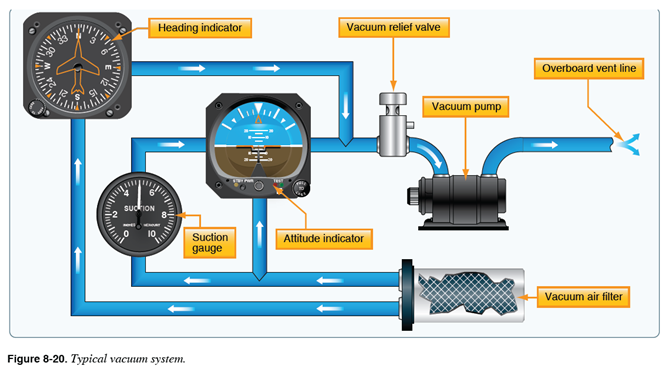
일반적인 진공 시스템은 engine-driven vacuum pump, relief valve, air filter, gauge, 그리고 tubing으로 구성된다. gauge는 항공기의 계기판에 장착된다. 이는 시스템 내 압력의 양을 나타낸다(진공은 주변 압력보다 낮게 측정된다).
engine-driven vacuum pump를 통해 공기가 진공 시스템 내로 들어온다. [그림 8-20] 공기는 먼저 필터를 통과한다. 이는 진공, 혹은 압력 시스템으로 이물질이 들어가는 것을 막는다. 공기는 attitude indicators와 heading indicators로 이동하여 자이로를 회전하게 만든다. relief valve는 진공 압력이 한계를 초과하는 것을 방지한다. 이후 공기는 바깥으로 배출되거나, 혹은 그 외의 시스템(예를 들어 pneumatic deicing boots의 팽창)에 사용된다.
비행 도중 진공 압력을 모니터링 하는 것이 중요하다. 왜냐하면 흡입 압력이 낮을 경우 attitude indicator와 heading indicator가 정확한 정보를 제공하지 못할 수 있기 때문이다. vacuum(혹은 suction) gauge는 일반적으로 normal range를 나타내도록 표시된다. 일부 항공기는 warning light를 장비한다. 이는 진공 압력이 허용 수준 아래로 떨어졌을 때 켜진다.
진공 압력이 normal operating range 아래로 떨어지면 자이로 계기가 불안정해지고 부정확해질 수 있다. 계기들을 규칙적으로 교차 점검하는 것은 좋은 습관이다.
Turn Indicators
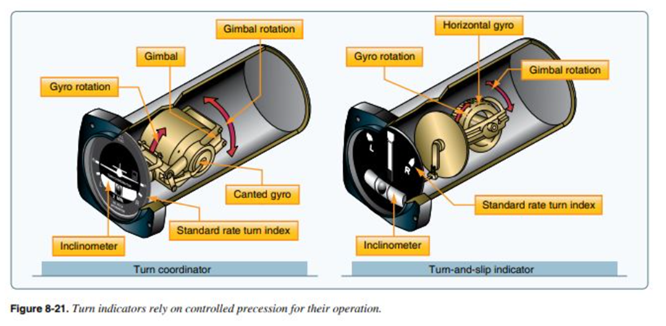
항공기는 두 가지 유형의 turn indicators를 사용한다: turn-and-slip indicators와 turn coordinators. turn-and-slip indicator는 gyro가 장착되는 방식 때문에 초당 선회율만을 나타낸다. turn coordinator는 canted 되어있기 때문에 초기에 roll rate도 나타낼 수 있다. roll이 안정화되면 turn coordinator는 선회율을 나타낸다. 두 계기들은 선회 방향과 품질(삼타일치)를 나타낸다. 또한 자세계가 고장 났을 때 bank 정보의 백업 역할을 한다. 삼타일치는 inclinometer를 참조함으로써 수행된다. inclinometer는 액체로 채워진 곡선 튜브로 그 안에는 ball이 있다. [그림 8-21]
Turn-and-Slip Indicator
turn-and-slip indicator 내의 자이로는 항공기의 세로축에 해당하는 수직면에서 회전한다. 하나의 gimbal은 자이로가 기울어질 수 있는 평면을 제한한다. 그리고 스프링은 중심 위치를 유지하는 역할을 한다. yawing force는 세차로 인해 자이로가 왼쪽, 혹은 오른쪽으로 기울어지게 만든다. turn-and-slip indicator는 turn needle이라 불리는 지시침을 사용하여 방향과 선회율을 나타낸다. restraining springs 때문에 turn-and-slip indicator는 회전축으로부터 “tumbling” off 할 수 없다. 자이로에 극심한 힘이 가해질 경우 자이로는 정상 회전면으로부터 이동한다. 이는 계기의 지시를 무효하게 만든다. 특정 계기들은 자이로를 tumble하게 만드는 특정 pitch limit과 bank limit을 가진다.
Turn Coordinator
turn coordinator의 gimbal은 canted 되어 있다. 따라서 자이로는 rate of roll과 rate of turn을 모두 감지할 수 있다. 훈련 항공기에서는 turn coordinators가 더 일반적으로 사용된다. 따라서 이 설명은 해당 계기에 집중된다. 선회로부터 roll in, 혹은 roll out을 수행할 때 miniature aircraft는 항공기의 roll 방향으로 bank 진다. 빠른 roll rate는 느린 roll rate보다 miniature aircraft를 더 가파르게 bank지게 만든다.
turn coordinator를 사용하여 표준율 선회를 설정 및 유지할 수 있다. 이는 miniature aircraft의 날개를 turn index에 정렬함으로써 이루어진다. 그림 8-22는 turn coordinator의 그림을 보여준다. 계기의 왼쪽과 오른쪽에는 두 개의 마킹이 있다. 첫 번째 마킹은 날개 수평(선회율 0)을 참조하기 위해 사용된다. 왼쪽과 오른쪽의 두 번째 마킹은 표준율 선회를 나타낸다. 표준율 선회는 초당 3도의 선회율로 정의된다. turn coordinator는 선회율, 그리고 선회 방향만을 나타낸다. 특정 bank angle은 나타내지 않는다.

Inclinometer
inclinometer는 항공기의 yaw(항공기 기수의 측면 움직임)를 나타내기 위해 사용된다. 삼타일치된 직진수평비행 도중 중력은 ball을 튜브의 가장 낮은 부분(reference lines의 중심)에 놓이게 한다. ball을 중심에 놓이게 유지함으로써 삼타일치 비행이 유지된다. ball이 중앙에 있지 않다면 rudder를 사용하여 중앙으로 돌려놓을 수 있다.
ball을 중앙으로 돌려놓기 위해선 ball이 편향된 방향으로 rudder를 가한다. 어느 rudder를 밟을지 기억하기 위해서는 “step on the ball”이라는 간단한 규칙을 사용한다. 선회 도중 aileron과 rudder가 삼타일치 되어 있다면 ball은 튜브의 중앙을 유지한다. 만약 공기역학적 힘이 불균형하다면 ball이 튜브의 중앙으로부터 멀어진다. slip은 bank angle에 비해 선회율이 낮아서 ball이 선회의 안쪽으로 이동한다. [그림 8-22] skid는 bank angle에 비해 선회율이 높아서 ball이 선회의 바깥으로 이동한다. 이러한 상황을 수정하고 선회의 품질을 향상하기 위해선 “step on the ball”을 기억하라. 또한 bank angle을 변화시키는 것도 slip/skid를 삼타일치 비행으로 회복하는데 도움이 될 수 있다. slip을 수정하기 위해선 bank 감소 및/혹은 선회율 증가를 수행한다. skid를 수정하기 위해선 bank 증가 및/혹은 선회율 감소를 수행한다.
Yaw String
항공기에 추가될 수 있는 하나의 추가 장치는 yaw string이다. yaw string은 wind screen의 중앙에 부착된 끈, 혹은 실이다. 삼타일치 비행 도중 string은 wind screen의 위쪽으로 곧장 향한다. 항공기가 slip, 혹은 skid 도중이라면 slip/skid 방향에 따라 yaw string이 왼쪽이나 오른쪽으로 이동한다.
Instrument Check
비행 전 점검 도중 inclinometer가 용액으로 가득 차 있는지, 그리고 기포가 없는지 확인한다. 또한 ball은 가장 낮은 지점에 위치해야 한다. taxi 도중 turn coordinator는 올바른 선회 방향을 표시해야 한다. 반면 ball은 선회 반대 방향으로 움직여야 한다.
Attitude Indicator
attitude indicator는 항공기의 자세를 보여준다. miniature aircraft와 horizon bar 사이의 관계는 실제 항공기와 실제 수평선 사이의 관계와 같다. 이 계기는 아주 작은 자세 변화도 즉시 알려준다.
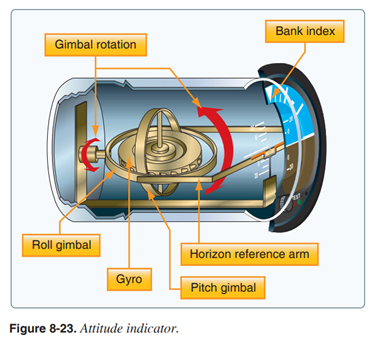
자세계 내의 자이로는 수평면에 장착된다. 이는 작동을 위해 공간강성을 사용한다. horizon bar는 실제 수평선을 나타낸다. 이 bar는 자이로에 고정되어 있어서 항공기가 가로축이나 세로축을 중심으로 pitch/bank 할 때 수평면을 유지한다. 이로 인해 실제 지평선을 기준으로 항공기의 자세를 나타낸다. [그림 8-23]
자이로는 수평면에서 회전하며 회전 경로로부터의 편향에 저항한다. 자이로의 공간강성 특성 때문에 항공기는 사실 자이로 주위를 회전한다.
조종사가 miniature aircraft를 위/아래로 움직일 수 있도록 adjustment knob가 제공된다. 이는 조종사의 시야에 맞도록 miniature aircraft를 horizon bar에 정렬한다. 일반적으로 miniature aircraft는 직진수평 순항 비행 도중 horizon bar와 겹쳐지도록 조정된다.
일부 자세계들은 100 ~ 100도의 bank 한계를, 그리고 60 ~ 70도의 pitch 한계를 가진다. ±25도의 pitch 정보만을 표시하는 자세계의 경우 만약 이러한 한계가 초과되었다면 항공기가 더 이상 그 한계를 초과하지 않을 때까지 해당 pitch indication을 유지할 수 있다. 혹은 계기가 “tumble” 하여 잘못된 pitch indication 및 bank indication을 나타낼 수도 있다. 항공기가 IMC를 운영 중인 경우, 혹은 조종사가 unusual attitude recovery를 수행 중인 경우 이는 매우 위험할 수 있다. 대다수의 최신 자세계에는 이러한 문제가 없다.
모든 조종사는 banking scale을 해석할 수 있어야 한다. [그림 8-24] 계기 상단에 위치한 banking scale indicators는 대부분 항공기가 실제로 bank진 방향을 향하여 움직인다. 허나 그 외 일부 모델의 경우 항공기가 실제로 bank진 방향의 반대로 움직인다. 만약 bank 방향을 결정하기 위해 indicator를 사용한다면 이는 조종사에게 혼란을 줄 수 있다. scale은 bank angle의 양을 제어하기 위해서만 사용되어야 한다. bank 방향을 위해서는 miniature aircraft와 horizon bar 사이의 관계를 이용해야 한다. 자세계는 신뢰도가 높은 계기이며 계기판에서 가장 현실적인 계기이다. 계기의 지시는 항공기의 실제 자세와 매우 유사하다.

Heading Indicator
heading indicator는 기본적으로 나침반의 사용을 용이하게 하도록 설계된 계기이다. 나침반의 오류는 매우 많아서 직진비행, 그리고 선회를 어렵게 만든다(특히 난기류에서). 그러나 heading indicator는 나침반 해석을 어렵게 만드는 힘들의 영향을 받지 않는다. [그림 8-25]

heading indicator는 공간강성의 원리를 사용한다. rotor는 수직면으로부터 회전한다. rotor에 고정된 것은 compass card이다. rotor는 공간강성을 유지하므로 card의 지점들은 자이로의 수직면에 관한 공간에서 동일한 위치를 유지한다. 항공기는 사실 자이로 주위를 회전한다. 항공기와 계기 케이스는 자이로의 수직축을 중심으로 회전하기 때문에 card는 정확한 heading 정보를 제공한다.
마찰로 인한 세차 때문에 heading indicator는 설정 위치로부터 조금씩 drift 한다. drift의 정도는 계기의 상태에 따라 크게 달라진다. 베어링이 마모되거나, 더럽거나, 혹은 부적절하게 윤활 된 경우 drift가 과도할 수 있다. heading indicator의 또 다른 오류는 지구가 한 시간마다 15도의 속도로 자전한다는 사실로 인해 발생한다. 따라서 마찰로 인한 세차를 배제한다 하여도 heading indicator는 한 시간마다 15도의 오차를 나타낼 수 있다.
HSI(horizontal situation indicators)라 불리는 일부 heading indicators는 magnetic slaving transmitter로부터 자북 기준을 수신하므로 보통 조정이 필요하지 않다. magnetic slaving transmitter는 magnetometer라 불린다.
Attitude and Heading Reference System(AHRS)
EFD는 자이로를 반도체 레이저 시스템으로 대체하였다. 이 시스템은 어느 자세에서도 tumbling 없이 비행할 수 있게 해준다. 이 기능은 AHRS 개발의 결과이다.
AHRS는 자세계의 pitch/bank 정보를 생성하기 위해 PFD에 자세 정보를 전송한다. heading 정보는 magnetometer로부터 도출된다. magnetometer는 지구의 자기력선을 감지한다. 이 정보는 처리된 다음 PFD로 전송되어 heading display를 생성한다. [그림 8-26]
The Flux Gate Compass System
지구 자기력선들은 두 가지 기본적인 특정을 가진다: 자석은 자기력선들에 연장됨, 그리고 자기력선을 가로지르는 모든 전선에 전류가 유도됨.
slaved gyro를 구동하는 flux gate compass는 전류 유도 특성을 사용한다. flux valve는 매우 작으며 분리된 고리 모양이다. [그림 8-27] 이는 연철로 이루어져 있기 때문에 자기력선을 쉽게 받아들일 수 있다. 자기장에 의해 이 고리에 유도된 전류를 받아들이기 위하여 전기 코일이 세 개의 leg에 각각 감겨있다. 프레임 중앙의 iron spacer에 감긴 코일에는 400Hz의 교류(A.C.)가 흐른다. 전류가 최대 지점에 도달하였을 때(한 주기 당 두 번) 코일에 의해 생성되는 자기가 너무 많아진다. 이로 인해 프레임이 지구 자기장의 자기력선을 받아들일 수 없다.
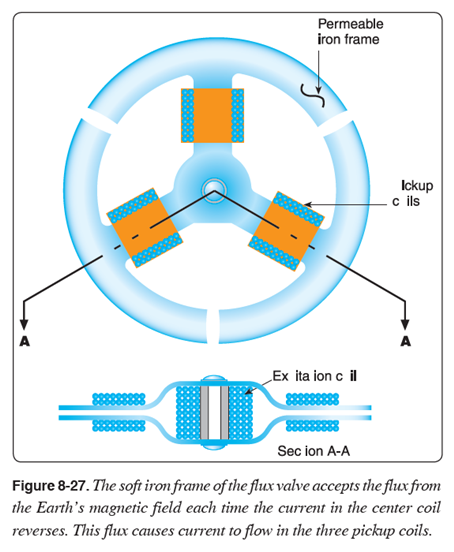
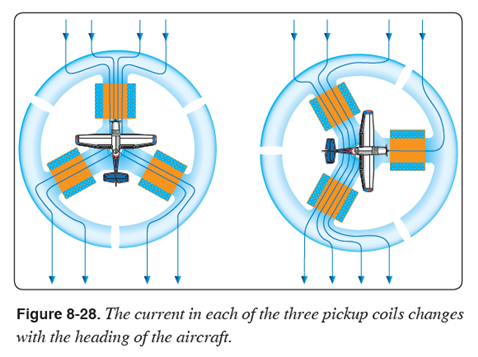
그러나 전류는 최대 지점마다 반대로 흐르면서 프레임의 자기를 없앤다. 이를 통해 프레임은 지구 자기장의 자기력선을 받아들일 수 있다. 자기력선이 세 개의 코일을 가로지를 경우 코일 내에 전류가 흐른다. 이 세 개의 코일은 항공기의 heading 변화에 따라 코일 내에 흐르는 전류가 변하는 방식으로 연결된다. [그림 8-28]
이 세 개의 코일은 계기 케이스 내부의 synchro로 연결된다. synchro는 RMI(radio magnetic indicator), 혹은 HSI(horizontal situation indicator)의 다이얼을 회전시킨다.
Remote Indicating Compass
remote indicating compass는 오래된 유형의 heading indicators에서 발생하는 오류 및 한계를 보완하기 위해 개발되었다. 일반적인 시스템에 장착되는 두 가지 구성 요소는 pictorial navigation indicator, 그리고 slaving control and compensator unit이다. [그림 8-29] pictorial navigation indicator는 일반적으로 HSI라 부른다.
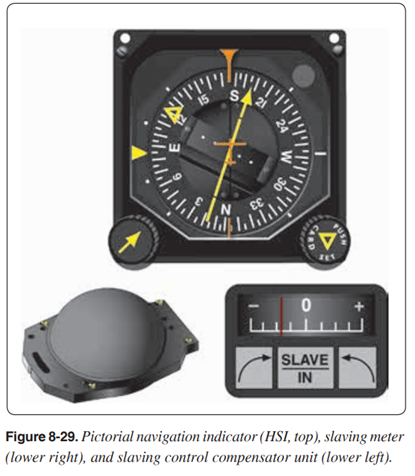
slaving control and compensator 장치에는 “slaved gyro”, 혹은 “free gyro” 모드를 선택할 수 있는 버튼이 있다. 또한 이 장치에는 slaving meter, 그리고 두 개의 수동 heading-drive 버튼이 있다. slaving meter는 현재 표시되는 heading과 magnetic heading의 차이를 나타낸다. right deflection은 compass card의 시계방향 오류를 나타내며 left deflection은 반시계방향 오류를 나타낸다. 항공기가 선회를 하여 card가 회전할 시 slaving meter는 한 쪽을 향하여 full deflection을 한다. 시스템이 “free gyro” 모드에 있을 경우 적절한 heading-drive 버튼을 눌러 compass card를 조정할 수 있다.
별도의 장치인 magnetic slaving transmitter는 멀리 장착된다(자기 간섭의 가능성을 제거하기 위해 보통 wingtip에 장착됨). 이 장치는 방향 감지 장치로서 flux valve를 가지고 있다. 자기력선들은 증폭된 후 heading indicator unit로 전달되는 신호가 된다. 이 신호는 heading indicator의 토크 모터를 작동하여 gyro unit이 transmitter 신호와 정렬되게 만든다. magnetic slaving transmitter는 HSI에 전기적으로 연결된다.
remote indicating compass에는 여러 가지 종류가 있다. 따라서 시스템의 기본적인 특징만이 여기서 다루어진다. 계기 조종사는 항공기에 설치된 장비의 특성을 숙지해야 한다.
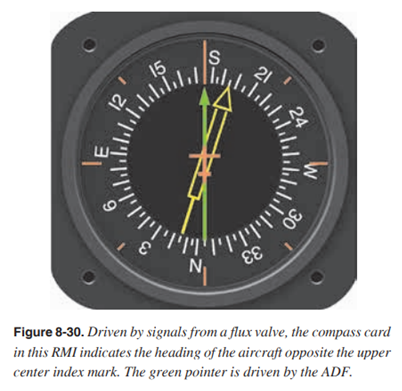
계기판은 점점 복잡해졌다. 그리고 조종실 업무량 증가에 의해 조종사가 이용 가능한 scan 시간이 줄어들었다. 계기 제조업체들은 계기들을 결합하기 위하여 노력하였다. 이에 대한 한 가지 좋은 예시는 RMI이다. [그림 8-30] compass card는 flux valve에 의해 작동한다. 그리고 두 개의 지시침은 ADF(automatic direction finder)와 VOR(very high frequency omnidirectional range)에 의해 작동한다.
자동으로 북쪽을 탐지하는 기능이 없는 heading indicators를 “free” gyros라 부른다. 이는 주기적인 조정을 필요로 한다. 계기의 지시를 자주 확인한 다음(약 15분마다) 필요 시 heading indicator를 나침반과 정렬하는 것이 중요하다. 나침반 오류를 방지하기 위해 항공기가 일정한 속도로 직진비행을 유지하고 있을 때 heading indicator를 나침반으로 조정한다.
heading indicator의 bank 및 pitch 한계는 계기의 특정 설계에 따라 달라진다. light aircraft에서 발견되는 일부 heading indicators의 한계는 대략 55도의 pitch와 55도의 bank이다. 이러한 자세 한계들 중 하나가 초과되면 계기가 “tumbles”(혹은 “spills)한다. 계기가 재설정되기 전까지는 더 이상 올바른 지시를 제공하지 않는다. spill 이후 caging knob를 통해 재설정을 수행할 수 있다. 현대 계기들의 대부분은 tumble 하지 않도록 설계된다.
자이로가 정렬을 유지하기엔 충분히 빠르게 회전하지 못할 경우 추가적인 세차 오류가 발생할 수 있다. 자이로 속도를 유지하기엔 진공 시스템의 흡입이 충분하지 못하다면 heading indicator와 attitude indicator의 자이로가 느려지기 시작한다. 자이로는 느려짐에 따라 회전면으로부터의 편향에 더 취약해진다. 일부 항공기는 low vacuum이 발생하였음을 나타내기 위해 warning lights를 가지고 있다. 그 외의 항공기에서는 vacuum gauge만 있을 수 있다.
Instrument Check
gyro가 spool up 할 때 비정상적인 소리가 나지는 않는지 확인한다. taxi 도중 계기는 올바른 방향으로 선회를 지시해야 하며 세차가 정상적이어야 한다. 진공 시스템을 사용하는 자이로 계기는 idle power일 때 충분한 속도에 도달하지 못할 수 있다. 때문에 비행할 때보다 세차가 더 빠르게 발생할 수 있다.
'PHAK(2023) > 8: Flight Instruments' 카테고리의 다른 글
| (2) Pitot-Static Flight Instruments (0) | 2023.06.12 |
|---|---|
| (3) Electronic Flight Display(EFD) (1) | 2023.06.12 |
| (5) Angle of Attack Indicators (0) | 2023.06.12 |
| (6) Compass Systems (1) | 2023.06.12 |
| (7) Outside Air Temperature(OAT) Gauge (0) | 2023.06.12 |