FIS는 MET(meteorological)과 AI(aeronautical information)을 조종실 화면에 전파하는 방법이다. 이는 조종사의 상황 인식을 강화하고, 의사 결정 수단을 제공하며, 안전성을 향상시키기 위함이다. FIS는 FSSs(Flight Service Stations), ATC facilities, 혹은 AOCCs(Airline Operations Control Centers)와의 조종사 음성 교신을 강화한다. FIS는 조종사와 controller/flight service specialist/aircraft dispatcher간의 비행 전 브리핑이나 비행 중 음성 교신을 대체하기 위한 것이 아니다. 허나 FIS는 이러한 교신을 축약하고 유용성을 개선하는데 도움이 되는 텍스트 및 그래픽 정보를 제공할 수 있다. FIS는 상황 인식을 강화하며 안전성을 개선한다.
a. Data Link Service Providers(DSPs). DSP는 AI/MET 정보 전송을 지원하는 인프라를 배포 및 유지한다. DSP는 최종 사용자가 AI/MET와 기타 정보를 업링크 및 다운링크 할 수 있는 무료 서비스나 유료 서비스를 제공할 수 있다. 다음은 DSPs의 예시이다:
1. FAA FIS-B. ADS-B UAT(Universal Access Transceiver) 네트워크를 통해 제공되는 ground-based broadcast. 사용자가 지상국의 범위 및 가시선 이내를 운영 중인 경우 이 서비스는 사용자에게 978 MHz의 데이터 링크 기능을 제공한다. 적절한 장비를 갖춘 항공기 사용자는 FIS-B를 통해 기상 정보와 항공 정보를 수신 및 표시할 수 있다.
2. Non-FAA FIS Systems. 여러 상용 공급업체들은 항공 주파수와 그 외 주파수들을 통해 고객들에게 FIS 정보를 제공한다. 이러한 공급업체가 제공하는 서비스는 매우 다양하며 구독료를 포함할 수 있다. 대역폭 기술의 발전 덕분에 지상에서 이용 가능한 MET 정보와 AI 정보를 비행 전 뿐만 아니라 비행 도중에도 이용할 수 있다. non-FAA FIS를 사용하는 조종사들은 해당 장비가 제공하는 기상 정보에 대해 잘 알고 있어야 한다. 왜냐하면 일부 상용 공급업체들은 NWS 기상을 재포장하는 반면 그 외 상용 공급업체들은 특정 기상 보고 및 예보를 생성하기 위해 기상 정보를 변경할 수 있기 때문이다.
b. Three Data Link Modes. 항공기에 AI 정보와 MET 정보를 전송하는데 사용될 수 있는 세 가지 데이터 링크 모드가 있다. AI 정보 및/혹은 MET 정보의 용도에 따라 data link service가 결정된다.
1. Broadcast Mode: 시스템 네트워크 구조에서 규정하는 범위 내에 위치한 모든 항공기(단, 방송 수신이 가능한 항공기)에게 특정 지리적 영역에 적용되는 AI 정보 및/혹은 MET 정보의 업데이트나 변경을 지속적으로(혹은 주기적 간격으로) 전송하는 단방향 상호 작용.
2. Contract/Demand Mode: 특정 요청에 대한 응답으로 AI 정보 및/혹은 MET 정보가 항공기에 전송되는 양방향 상호작용.
3. Contract/Update Mode: Demand Mode가 확장된 것. 초기 AI 정보 및/혹은 MET 정보가 항공기에 전송된 후 contract criteria를 만족하는 정보 업데이트나 변경이 항공기에 자동으로(혹은 수동으로) 전송된다.
c. 제조업체의 운영 매뉴얼은 조종사로 하여금 항공 기상 정보 및/혹은 NAS 상황(예를 들어 NOTAMs, Special Use Airspace, 그리고 기타 government flight information)에 대하여 ATC controllers, FSS specialists, operator dispatchers, 혹은 airline operations control centers와 교신해야함을 상기시켜야 한다. FIS 제품의 시스템이 변경된 경우 제조업체의 사용자 설명서에 수정 과정과 제품 제한 사항이 명확하게 설명되어야 한다.
d. Operational Use of FIS. FIS를 사용 중인 경우 해당 FIS system의 형식에 관계없이 몇 가지 요소를 고려해야 한다:
1. 비행 운영을 위해 FIS를 사용하기 전에 조종사는 사용할 FIS 시스템의 작동 방법, 사용할 공중 장비(시스템 구조, 시스템 구성 요소, 서비스 범위, 그리고 제한 사항), 작동 모드, 그리고 다양한 시스템 고장 지시들을 숙지해야 한다. 또한 사용자는 FIS가 제공하는 서비스의 구체적인 내용과 형식도 잘 알고 있어야 한다. 이러한 정보는 제조업체의 매뉴얼, 훈련 프로그램, 그리고 참고 안내서에서 확인될 수 있다.
2. FIS가 항공 기상 정보 및 기타 운항 정보를 위한 유일한 출처가 되어서는 안 된다. ATC, FSSs, 그리고 AOCC VHF/HF 음성 교신은 비행 중인 항공기에 항공 기상, NOTAMs, 그리고 기타 운항 정보를 전달하는 수단으로 남아있다. FIS는 이러한 ATC/FSS/AOCC 서비스를 강화한다. 일부 FIS 제품의 경우에는 그래픽 정보로 표시되는 이점을 제공한다. 방향정위에 FIS를 사용할 경우 ATC/FSS/AOCC로부터 받은 정보의 유용성이 향상될 수 있다.
3. 공역과 항공 환경은 끈임 없이 변화한다. 이러한 변화는 예고 없이 빠르게 발생한다. 중요한 결정을 내려야하는 경우 이용 가능한 최신 데이터를 기반으로 해야 한다. ATC∙FSS∙AOCC와의 음성 교신을 통해 얻은 정보와 FIS 정보 사이에 차이가 있는 경우 조종사는 가장 권위 있는 출처로부터 얻은 최신 정보를 사용해야 한다.
4. FIS 항공 기상 정보(예를 들어 graphical ground-based radar precipitation)는 악기상의 tactical avoidance에 적합하지 않다.
FIS는 기상 위험 지역을 완전히 회피하는 경로를 선택하는 strategic weather decision을 지원한다. FIS의 적용 범위를 벗어나도록 정보를 사용하는 경우 조종사와 항공기가 위험에 빠질 수 있다. 또한 FIS를 비행 전 기상 및 계획 브리핑을 대신하여 사용해서도 안 된다.
a. Manual Observations. 이러한 보고는 직원이 직접 관측 및 계산을 수행한 다음 이러한 정보들을 (WMSCR) communication system에 입력하는 공항에서 작성된다. 이러한 관측의 형식 및 코딩이 paragraph 7-1-28, Key to Aviation Routine Weather Report (METAR) and Aerodrome Forecasts (TAF)에 포함되어 있다.
b. Automated Weather Observing System(AWOS).
1. Automated weather reporting systems가 공항들에 점점 더 많이 설치되고 있다. 이러한 시스템은 다양한 센서, 프로세서, 컴퓨터 음성 시스템, 그리고 송신기로 구성되어 있다. 이는 현지의 분 단위 기상 데이터를 조종사에게 직접 방송하기 위함이다.
NOTE-
대기압이 31.00inches Hg를 초과하는 경우 Para 7-2-3, Altimeter Errors를 참조한다.
2. AWOS(automated weather observing system)의 관측 자료에는 “AUTO”라는 접두사가 포함된다. 이는 해당 정보가 자동 시스템으로부터 파생되었음을 나타낸다. 일부 AWOS 자료는 관측자에 의해 보강된다. 보고된 시정이 7마일 미만일 경우 관측자는 보고의 remarks에 기상 정보와 시정 차폐물 정보를 제공한다. 관측 자료의 보강은 “OBSERVER WEATHER”를 통해 식별된다. AWOS의 풍속, 풍향, 돌풍, 온도, 이슬점, 그리고 altimeter setting은 manual observations와 정확히 동일하다. 또한 밀도 고도가 field elevation으로부터 1,000ft를 초과하는 경우 AWOS는 밀도 고도도 보고한다. 시정은 primary instrument runway의 touchdown 근처에 위치한 센서로부터 산출된다. 시정 센서의 산출 값은 10분간의 조화 평균을 통해 시정 값으로 변환된다. sky conditions/ceiling은 시정 센서 옆에 위치한 운고계에서 산출된다. AWOS는 지난 30분간의 운고계 정보를 통합하여 구름 층 및 높이를 산출한다. AWOS는 센서 상공의 구름 움직임만을 전적으로 의존하므로 이 값은 관측자의 sky condition과 다를 수 있다.
3. 이러한 실시간 시스템은 9가지 레벨로 분류된다:
(A) AWOS-A는 altimeter setting만을 보고한다.
NOTE-
이 외의 정보는 권고 사항일 뿐이다.
(B) AWOS-AV는 altimeter와 visibility를 보고한다.
NOTE-
이 외의 정보는 권고 사항일 뿐이다.
(c) AWOS-1은 보통 altimeter setting, 바람 정보, 온도, 습도, 그리고 밀도 고도를 보고한다.
(d) AWOS-2는 AWOS-1이 제공하는 정보에 시정이 더해진다.
(e) AWOS-3는 AWOS-2가 제공하는 정보에 cloud/ceiling이 더해진다.
(f) AWOS-3P는 AWOS-3이 제공하는 정보에 precipitation identification sensor가 더해진다.
(g) AWOS-3PT는 AWOS 3P가 제공하는 정보에 thunderstorm/lightning 보고 기능이 더해진다.
(h) AWOS-3T는 AWOS 3이 제공하는 정보에 thunderstorm/lightning 보고 기능이 더해진다.
(i) AWOS-4는 AWOS-3이 제공하는 정보에 precipitation occurrence sensor, type and accumulation sensor, freezing rain sensor, thunderstorm sensor, 그리고 runway surface sensor가 더해진다.
4. 해당 정보는 discrete VHF radio frequency를 통해, 혹은 NAVAID의 voice portion을 통해 전송된다. discrete VHF radio frequency를 사용하는 AWOS는 해당 지역으로부터 최대 25NM, 그리고 최대 10,000ft AGL까지 신호를 수신할 수 있도록 설계되어 있다. 대부분의 지역에서는 AWOS 신호를 공항 표면에서 수신할 수 있다. 허나 현지 조건에 따라 최대 AWOS 수신 거리 및/혹은 고도가 제한될 수 있다. 시스템은 1분마다 업데이트 되는 20 ~ 30초 분량의 기상 메시지를 전송한다. 조종사는 automated weather broadcast를 위해 특정 주파수를 모니터링 해야 한다. 방송에 대한 설명이 subparagraph c에 포함되어 있다. 여기에 양방향 교신 기능은 없다. 대부분의 AWOS 지역들은 다이얼 접속 기능을 가지고 있으므로 전화를 통해서도 기상 메시지를 이용할 수 있다.
5.AWOS 정보(시스템 레벨, 주파수, 전화 번호, 등등)들이 Chart Supplement U.S.에 게재되며 해당하는 경우 Instrument Approach Procedures에도 게재된다.
c. AWOS Broadcasts. 1분 단위의 기상 관측을 자동으로 방송하기 위하여 컴퓨터 음성이 사용된다. 일부 시스템의 경우 운영자가 생성한 음성 메시지(예를 들어 automated parameters를 뒤따르는 weather remarks)가 추가될 수 있도록 구성된다. 여기에 사용되는 용어들은 일반적으로 이 외의 기상 방송들에서 사용되는 것과 동일하다. 다음은 예외에 대한 설명과 그 예시이다.
1. Location and Time. 위치/명칭과 “AUTOMATED WEATHER OBSERVATION”이라는 문구 다음에 시간이 방송된다.
(a) 공항의 특정 위치가 공항 명칭에 포함되는 경우 공항 명칭이 방송된다.
EXAMPLE-
“Bremerton National Airport automated weather observation, one four five six zulu;”
“Ravenswood Jackson County Airport automated weather observation, one four five six zulu.”
(b) 공항의 특정 위치가 공항 명칭에 포함되지 않는 경우 공항 명칭 다음에 위치가 방송된다.
EXAMPLE-
“Sault Ste. Marie, Chippewa County International Airport automated weather observation;”
“Sandusky, Cowley Field automated weather observation.”
(c) 시스템이 아직 권한을 갖추지 아니한 경우 “OBSERVATION” 다음에 “TEST”가 추가된다.
EXAMPLE-
“Bremerton National Airport automated weather observation test, one four five six zulu.”
(d) 시스템이 작동하지 않는 경우 “TEMPORARILY INOPERATIVE”라는 문구가 추가된다.
EXAMPLE-
“Bremerton National Airport automated weather observing system temporarily inoperative.”
2. Visibility
(a) AWOS에서 보고 가능한 가장 낮은 시정 값은 “1/4 미만”이다. 이는 “VISIBILITY LESS THAN ONE QUARTER”로 방송된다.
(b) 일부 AWOS에는 시정을 결정하는 센서가 포함되어 있지 않다. 이러한 시스템에서는 시정이 방송되지 않는다. 시스템이 시정 센서를 갖추고 있으나 시정 정보가 이용될 수 없는 경우에만 “VISIBILITY MISSING”이 표시된다.
3. Weather. 일부 AWOS는 precipitation을 결정하도록 갖춰질 예정이다. 허나 그 형식과 강도가 항상 결정되는 것은 아니다. precipitation이 발생한 경우 이러한 시스템은 “PRECIPITATION”이라 방송할 것이다. 허나 형식과 강도가 결정되지는 않는다.
4. Ceiling and Sky Cover.
(a) ceiling은 “CEILING”, 혹은 “INDEFINITE CEILING”이라 방송된다. 모든 automated ceiling heights가 측정된다(단, indefinite ceilings 제외).
EXAMPLE-
“Bremerton National Airport automated weather observation, one four five six zulu. Ceiling two thousand overcast;”
“Bremerton National Airport automated weather observation, one four five six zulu. Indefinite ceiling two hundred, sky obscured.”
(b) AWOS에서는 “Clear”라는 단어를 사용하지 않는다. 이는 센서의 높이 범위 한계 때문이다. 구름이 탐지되지 않는 경우 “NO CLOUDS BELOW XXX”, 혹은 “CLEAR BELOW XXX”라 방송된다(여기서 XXX는 센서의 범위 한계임).
EXAMPLE-
“No clouds below one two thousand.”
“Clear below one two thousand.”
(c) 일부 AWOS는 ceiling과 sky cover를 결정하는 센서가 포함되어 있지 않다. 이러한 시스템에서는 ceiling과 sky cover가 방송되지 않는다. 시스템이 ceilometer를 갖추고 있으나 ceiling 및 sky cover 정보가 이용될 수 없는 경우에만 “SKY CONDITION MISSING”이라 방송된다.
5. Remarks. 관측 자료에 remarks가 포함되는 경우 altimeter setting 다음에 “REMARKS”가 방송된다.
(a) Automated “Remarks.”
(1) Density Altitude.
(2) Variable Visibility.
(3) Variable Wind Direction.
(b) Manual Input Remarks. manual input remarks의 앞에는 “OBSERVER WEATHER”이라는 문구가 붙는다. 보통 manual remarks는 다음으로 제한된다:
(1) Type and intensity of precipitation.
(2) Thunderstorms and direction.
(3) Obstructions to vision when the visibility is 3 miles or less.
EXAMPLE-
“Remarks ... density altitude, two thousand five hundred ... visibility variable between one and two ... wind direction variable between two four zero and three one zero ...observed weather ... thunderstorm moderate rain showers and fog ... thunderstorm overhead.”
(c) automated parameter가 “missing”된 상태이고 해당 parameter에 대한 manual input이 이용될 수 없다면 이는 “MISSING”이라 보고된다.
EXAMPLE-
“Ceiling one thousand overcast ... visibility three ... precipitation ... temperature three zero, dew point missing ... wind calm ... altimeter three zero zero one.”
(d) “REMARKS”는 다음 우선순위에 따라 방송된다:
(1) Automated “REMARKS.”
[a] Density Altitude.
[b] Variable Visibility.
[c] Variable Wind Direction.
(2) Manual Input “REMARKS.”
[a] Sky Condition.
[b] Visibility.
[c] Weather and Obstructions to Vision.
[d] Temperature.
[e] Dew Point.
[f] Wind.
[g] Altimeter Setting.
EXAMPLE-
“Remarks ... density altitude, two thousand five hundred ... visibility variable between one and two ... wind direction variable between two four zero and three one zero ... observer ceiling estimated two thousand broken ... observer temperature two, dew point minus five.”
d. Automated Surface Observing System(ASOS)/Automated Weather Observing System(AWOS). ASOS/AWSS는 항공 운항, 그리고 기상 예보 활동을 지원하도록 설계되었다. ASOS/AWSS는 분 단위 관측 자료를 연속적으로 제공하며 METAR와 기타 항공 기상 정보를 생성하는데 필요한 관측을 수행한다. 해당 정보는 discrete VHF radio frequency를 통해, 혹은 NAVAID의 voice portion을 통해 전송될 수 있다. discrete VHF radio frequency를 통해 전송되는 ASOS/AWSS는 최대 25NM까지 수신될 수 있도록, 그리고 최대 10,000ft AGL까지 수신될 수 있도록 설계되었다. 대부분의 경우 공항 표면에서 ASOS/AWSS 신호를 수신할 수 있다. 허나 현지 조건으로 인하여 최대 수신 거리 및/혹은 고도가 제한될 수 있다. 데이터를 수집 및 해석하는 방법은 자동 시스템과 관측자간에 차이가 있을 수 있으나 둘 다 매우 유사한 관측 자료를 생성한다. 객관적인 요소의 경우(예를 들어 압력, 주변 온도, 이슬점 온도, 바람, 그리고 강수 축적) 자동 시스템과 관측자는 모두 특정 위치와 시간 평균(time-averaging) 기법을 사용한다. 이러한 요소들에 대한 자동 시스템과 관측자 간의 차이는 무시할 수 있을 정도로 작다. 허나 주관적인 요소의 경우 관측자는 시각적 요소들(구름, 시정, 그리고 기상 등등)을 설명하기 위해 특정 시간과 공간 평균(spatial averaging) 기법을 사용하는 반면 자동 시스템은 특정 위치와 시간 평균 기법을 사용한다. 이는 근본적인 변화이지만 수동 기법과 자동 기법은 각 한계 내에서 매우 유사한 결과를 도출한다.
1. System Description.
(a) 각 공항의 ASOS/AWOS는 네 가지 주요 구성 요소들로 이루어져 있다:
(1) Individual weather sensors.
(2) Data collection and processing units.
(3) Peripherals and displays.
(b) ASOS/AWOS 센서들은 데이터 습득을 수행한다. 센서들은 지속적으로 주변 환경을 측정하고 데이터를 도출하여 collection and processing units에서 사용될 수 있도록 만든다.
2. 모든 ASOS/AWOS는 다음과 같은 기본 센서들을 포함한다:
(a) Cloud height indicator (one or possibly three).
(b) Visibility sensor (one or possibly three).
(c) Precipitation identification sensor.
(d) Freezing rain sensor (at select sites).
(e) Pressure sensors (two sensors at small airports; three sensors at large airports).
(f) Ambient temperature/Dew point temperature sensor.
(g) Anemometer (wind direction and speed sensor).
(h) Rainfall accumulation sensor.
(i) Automated Lightning Detection and Reporting System (ALDARS) (excluding Alaska and Pacific Island sites).
3. ASOS/AWOS data outlets는 다음과 같다:
(a) Those necessary for on-site airport users.
(b) National communications networks.
(c) Computer-generated voice (available through FAA radio broadcast to pilots, and dial-in telephone line).
NOTE-
ASOS, AWOS, 그리고 ATIS에서 풍향은 자북을 기준으로 보고된다.
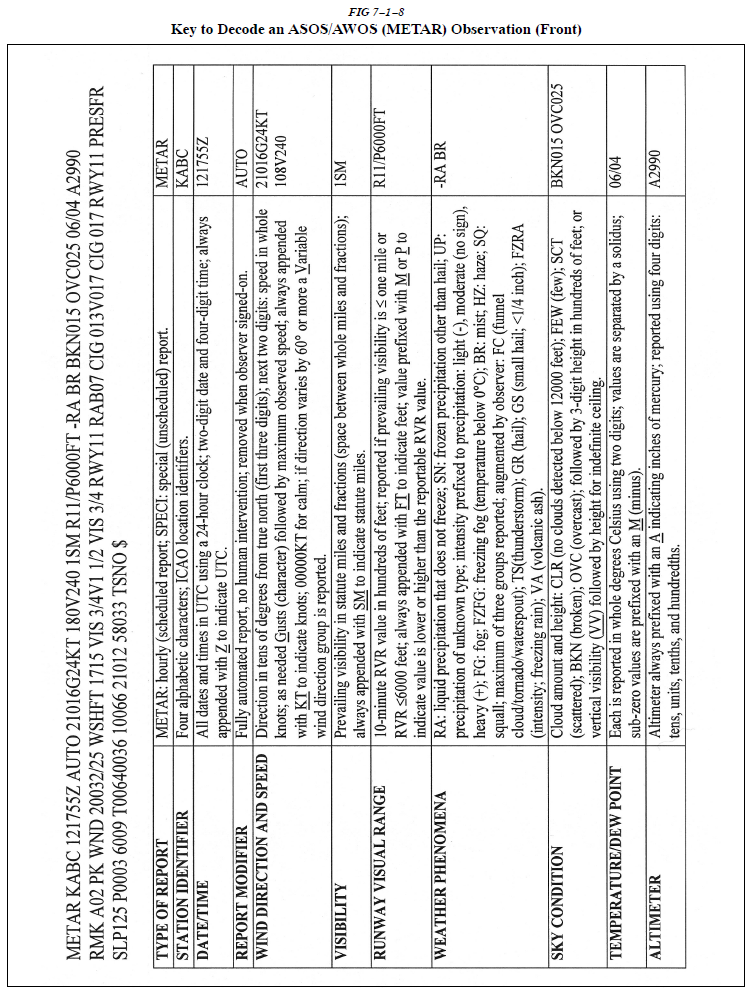
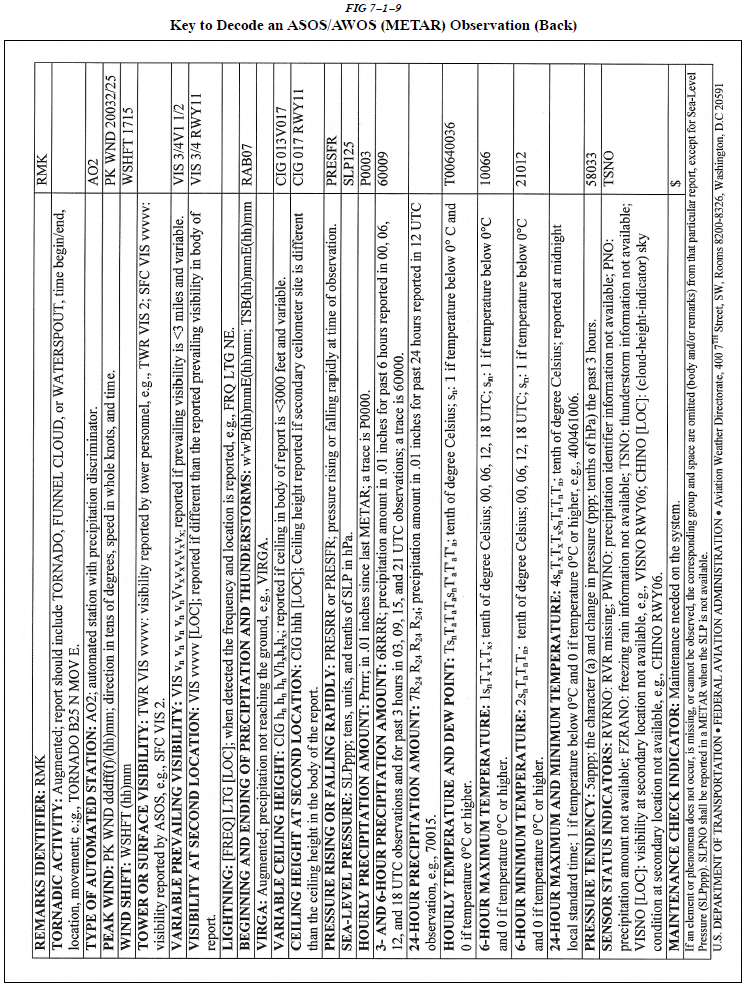
4. 관측자가 개입하지 않은 ASOS/AWOS 보고에는 자동으로 보고될 수 있는 기상 데이터만이 포함된다. 이러한 METAR 보고의 수식어는 “AUTO”이다. 관측자가 ASOS/AWOS를 보강하는 경우 “AUTO”가 사라진다.
5. automated stations에는 두 가지 형식이 있다. AO1은 강수량 판별 장치가 없는 automated weather reporting stations이다. 반면 AO2는 강수량 판별장치가 있는 automated stations이다. “AO1”과 “AO2”가 remarks에 표시되어야 한다. (강수량 판별 장치는 액체 강수와 동결 강수의 차이를 판별할 수 있다).
NOTE-
ASOS/AWOS 보고를 해석하기 위해선 그림 7-1-8과 7-1-9를 참조한다.
REFERENCE-
A complete explanation of METAR terminology is located in AIM, Para 7-1-28, Key to Aerodrome Forecast (TAF) and Aviation Routine Weather Report (METAR).
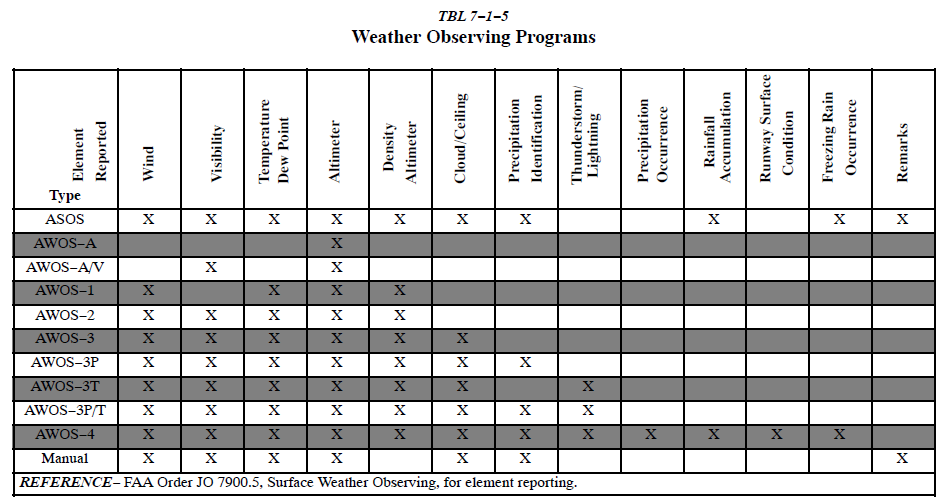
e. 표 7-1-5는 weather observing programs와 그 보고 요소들을 비교한다.
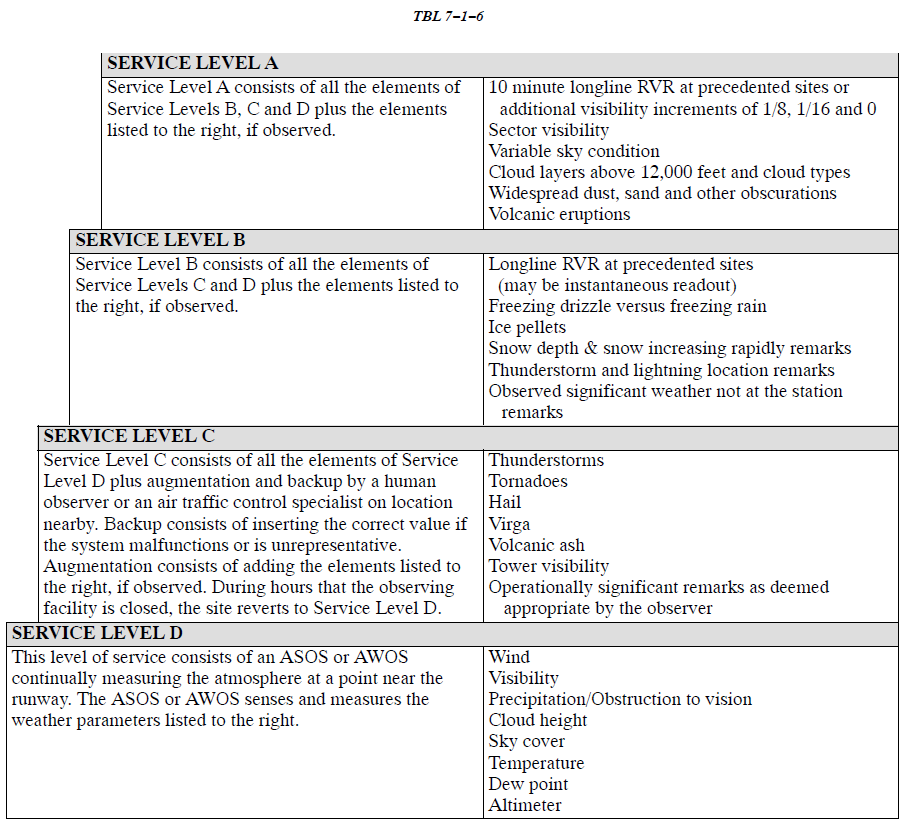
f. Service Standards. “Service Standards”라는 용어는 기상 관측 보고의 세부 수준을 나타낸다. service standards는 네 가지 서비스 수준(A, B, C, D)으로 구성된다. 각 서비스 수준에 포함되는 구체적인 관측 요소들은 표 7-1-6에 나열되어 있다.
1. Service Level D는 이용 가능한 최소 서비스 수준을 규정한다. ASOS/AWOS가 모든 관측을 구성하는 완전 자동화 서비스이다(즉, 관측자에 의한 기상 정보가 추가되지 않는다). 이러한 서비스를 stand alone D site라 부른다.
2. Service Level C는 관측자(일반적으로 항공 교통 관제사)가 automated observation을 보강하는 서비스이다. 또한 Service Level C는 ASOS/AWOS의 고장, 혹은 전형적이지 못한 ASOS/AWOS 보고에 대비하여 백업을 포함한다. 백업 시 관측자는 automated ASOS/AWOS 요소들에 대한 올바른 값을, 혹은 누락된 값을 삽입한다. 해당 서비스는 LAWRS(Limited Aviation Weather Reporting Station) 관제사, FSS 및 NWS 관측자, 그리고 특정 지역의 경우 Non-Federal Observation Program 관측자에 의해 제공된다.
항공 교통 관제 효율성을 높이기 위해, 그리고 시스템 수용력을 증가시키기 위해 Service Level C를 초과하는 세부 정보들을 필요로 하는 공항들이 있다. 해당 공항들의 서비스는 일반적으로 기상 관측자, NWS 관측자, 그리고 일부 지역의 경우 FSS 관측자가 제공한다.
3. Service Level B는 Service Level C에서 제공하는 모든 기상 관측 요소들에 ASOS/AWOS 기능을 넘어서는 추가 데이터가 보강되는 서비스이다. 이러한 공항으로는 smaller hubs, 혹은 special airports를 포함한다.
4. Service Level A는 Service Standard B에서 보고되는 모든 데이터에 특정 추가 요건들이 포함된다. Service Level A는 평균 이하의 기상을 갖춘 주요 허브 공항 및/혹은 교통량이 많은 공항에서 적용된다.
a. National Weather Service는 강수의 범위, 강도, 그리고 이동을 탐지하기 위해 레이더 네트워크를 운영한다. 이 네트워크는 서부 지역의 FAA와 DOD 레이더에 의해 보완된다. 필요한 경우 local warning radar가 경보 프로그램과 예보 프로그램을 지원함으로써 네트워크를 보강한다.
b. 비행 계획을 위해 레이더 관측이 매시간 수행되며 이는 기상 통신 회로를 통해 영숫자 형식으로 전송된다. 특정 상황에서는 정시 보고 외에 특별 레이더 보고가 발부된다.
c. 레이더에 아무것도 표시되지 않는 지역은 강수가 감지되지 않는 곳이다. 그렇다 하여 해당 지역에 중요 기상이 없다는 것은 아니다. 구름과 안개는 레이더에 의해 탐지되지 않는다. 레이더에코가 존재하는 경우 강수의 강도를 통해 난기류를 예상할 수 있으며 해당 영역이 0도 이하라면 착빙도 예상할 수 있다. 레이더는 기상 회피와 비행 계획에 귀중한 정보를 제공한다.
d. 모든 En Route Flight Advisory Service 시설들과 FSS는 각 기상 레이더의 화면에 직접 접속할 수 있는 장비를 갖추고 있다. 이러한 장소의 전문가들은 pilot briefing과 inflight advisory service를 위해 화면을 해석할 수 있도록 훈련받았다. ARTCC에 위치한 Center Weather Service Units 또한 기상 레이더 화면에 접속할 수 있으며 center 구역 내의 항공 교통 시설들에 지원을 제공한다.
e. 기상 레이더 정보 및 서비스에 대한 추가 정보는 AC 00-45, Aviation Weather Services에서 확인할 수 있다.
1. ATC radar는 무선 에너지를 전송하여 강수지역을 표시할 수 있다. 이러한 무선 에너지는 비, 우박, 혹은 눈의 형태일 수 있는 물체나 수분에 부딪혀 레이더 안테나에 돌아온다. 물체가 클수록, 혹은 반사 표면의 밀도가 클수록 더 강한 반사 신호가 발생한다. radar weather processors는 반사 신호의 강도를 데시벨(dBZ) 단위로 나타낸다. ATC system은 구름의 유무를 감지할 수 없다. ATC system은 보통 강수지역의 강도는 결정할 수 있지만 그 지역의 명확한 특징(눈, 비, 우박, VIRGA, 등등)을 결정할 수는 없다. 이러한 이유로 ATC는 ATC 레이더에 표시되는 모든 기상 지역을 “강수(precipitation)”이라 부른다.
2. 강수의 강도를 결정할 수 있는 radar weather processors를 사용하는 경우 ATC 시설들은 조종사에게 다음과 같이 강도를 설명할 것이다:
(a) “LIGHT” (< 26 dBZ)
(b) “MODERATE” (26 to 40 dBZ)
(c) “HEAVY” (> 40 to 50 dBZ)
(d) “EXTREME” (> 50 dBZ)
NOTE -
En route ATC radar의 Weather and Radar Processor(WARP)는 light precipitation 강도를 나타내지 않는다.
3. 장비의 한계로 인해 강수의 강도를 나타낼 수 없는 ATC 시설은 지리적 위치, 혹은 항공기로부터의 위치를 통해 강수 지역의 위치를 설명할 것이다. 강도를 나타낼 수 없기 때문에 관제사는 “INTENSITY UNKNOWN”이라 명시할 것이다.
4. ARTCC 시설은 보통 Weather and Radar Processor(WARP)를 사용하여 다수의 NEXRAD에서 얻은 데이터를 표시한다. 실제 상황과 관제사에게 표시되는 상황 사이에는 시간 지연이 있다. 예를 들어 ARTCC 관제사의 화면에 나타나는 강수 정보는 최대 6분 이전의 것일 수 있다. WARP를 사용할 수 없는 경우 ARSR(Air Route Surveillance Radar)을 통해 조종사에게 두 가지 강수 강도를 나타낼 수 있다(“MODERATE”(30 ~ 40 dBZ)와 “HEAVY TO EXTREME”(>40 dBZ)). WARP processor는 ARTCC 시설에서만 사용된다.
5. ATC radar는 난기류를 탐지할 수 없다. 일반적으로 난기류는 강수의강도가 증가함에 따라 증가하리라 예상될 수 있다. 강한 강수와 연관된 난기류는 보통 약한 강수와 연관된 난기류보다 극심하다. 난기류는 대류 활동 근처에서 발생할 것으로 예상된다(심지어 맑은 날씨라 하더라도). 뇌우는 severe(or greater) turbulence를 암시하는 대류 활동의 한 형태이다. 뇌우로부터 20마일 이내로 진입하는 경우 매우 주의해야 한다. 왜냐하면 강수의강도가 나타내는 것보다 난기류가 더 극심할 수 있기 때문이다.
b. Weather Avoidance Assistance.
1. 관제사는 최대한 기상이나 chaff areas와 관련된 정보를 발부할 것이다. 또한 조종사가 요청 시 이러한 지역을 회피하도록 지원한다. ATC로부터 기상 조언을 받은 경우 조종사는 해당 조언을 acknowledge 하거나, 혹은 다음과 같은 대체 조치를 요청해야 한다:
(a) heading/degree, 벗어날 방향, 그리고 대략적인 마일을 명시하여 deviate off course를 요청한다. 요청이 승인될 경우 항법은 조종사의 재량이다. 허나 할당받았던 고도를 유지해야 하며 ATC가 발부한 수평 한계 이내에 있어야 한다.
(b) lateral deviation에 대한 승인은 조종사로 하여금 clearance에서 지정한 한계 이내에서 왼쪽/오른쪽으로 기동할 권한을 부여한다.
NOTE-
1. 종종 ATC는 lateral deviation의 정도를 제한해야 한다(“twenty degrees right,” “up to fifteen degrees left,” “up to ten degrees left or right of course”).
2. ATC weather deviation clearance에서 “when able, proceed direct”이라는 용어는 조종사가 course/route로 되돌아갈 때 기상의 영향을 받지 않는 상태를 유지할 수 있음을 의미한다.
(c) 영향 지역을 회피하기 위하여 새로운 경로를 요청한다.
(d) 고도 변경을 요청한다.
(e) 영향 지역을 우회하는 radar vectors를 요청한다.
2. 안전을 위하여 IFR 조종사는 ATC clearance 없이 course, 혹은 altitude/flight level을 이탈해서는 안 된다. 마주한 기상 조건이 너무 극심하여 즉시 이탈해야 된다 판단하였으나 ATC의 승인을 받기엔 시간이 허락되지 않는다면 조종사의 비상 권한을 행사할 수 있다.
3. 조종사가 route deviation, 혹은 ATC radar vector에 대한 clearance를 요청할 경우 관제사는 해당 요청에 응하기 전에 영향 지역의 교통 상황을 평가해야 한다. 그리고 만약 ATC 관할 경계선을 넘을 수 있다면 다른 관제사와 조율해야 한다.
4. 관제사의 주요 목적은 항공기 간의 안전한 분리를 제공하는 것이다. 부가적인 서비스(예를 들어 기상 회피 조언)는 관제사의 주요 목적을 방해하지 않는 범위에서만 제공될 수 있다. 또한 기상으로 인하여 교통 흐름이 방해될 경우 분리를 위한 업무가 평상시보다 더 많다는 점을 주의해야 한다. ATC radar의 한계와 주파수 혼잡도 부가적인 서비스를 제공하는 관제사의 능력을 제한하는 요인이 될 수 있다.
5. 따라서 최대한 빨리 ATC에게 deviation, 혹은 radar vector를 요청하는 것이 중요하다. 이러한 요청이 지연될 경우 ATC 승인이 지연되거나, 혹은 심지어 불가능할 수 있으며 clearance에 추가 제한이 요구될 수 있다. 기상 활동을 우회하는 clearance를 요청할 경우 최대한 다음 정보를 ATC에 제공해야 한다:
(a) 우회를 시작하려는 지점.
(b) 의도하는 경로와 우회 범위(방향 및 거리).
(c) 초기 비행경로가 재개될 지점.
(d) 비행 조건(IFR, 혹은 VFR).
(e) 비행이 진행됨에 따라 필요할 수 있는 추가적인 deviation.
(f) 항공기에 airborne radar가 장착된 경우 이를 알린다.
6. ATC가 제공할 수 있는 지원은 보통 관제사가 이용할 수 있는 기상 정보에 따라 달라진다. 관제사의 기상 정보가 오직 레이더로 관측된 기상만을 기초로 한다면 그 가치는 매우 제한적일 수 있다. 이는 극심한 기상의 일시적인 특성 때문이다. 극심한 기상의 위치, 고도, 강도, 그리고 특성에 대한 특정 정보를 조종사가 제공하는 경우 이는 상당한 가치가 있을 수 있다. 이러한 보고는 라디오나 전화로 다른 조종사들과 관제사에게 전달된다.
7. en route area에서는 극심한 기상을 우회하기 위한 IFR clearance나 ATC radar vector가 쉽게 수용될 수 있다. 왜냐하면 en route area에서는 혼잡이 적기 때문에 더 자유롭게 운항할 수 있기 때문이다. 반면 terminal areas에서는 문제가 심하다. 왜냐하면 항적의 양, ATC coordination 조건, 복잡한 departure route와 arrival route, 인접 공항, 등등 때문이다. 결과적으로 terminal area에서는 관제사가 기상 우회 요청을 모두 수용할 가능성이 낮다. 그럼에도 불구하고 조종사는 본인이 관측한 극심한 기상에 대하여 관제사에게 즉시 알려야 하며 우회를 원한다면 명확하게 요청해야 한다.
현재 NAS에는 일반적으로 두 가지 RVR이 있다: Taskers, 그리고 New Generation RVR. Taskers는 transmissometer 기술을 사용하는 기존의 장치이다. New Generation RVR는 1994년 11월부터 배치되었으며 이는 전방 산란(forward scatter) 기술을 사용한다. 현재 Taskers를 대체하기 위해 New Generation RVR이 배치되고 있다.
a. RVR은 활주로를 따라 14ft 탑에 설치된 transmissometers에서 측정된다. full RVR system은 다음으로 구성된다:
1. Transmissometer projector and related items.
2. Transmissometer receiver(detector) and related items.
3. Analog recorder.
4. Signal data converter and related items.
5. Remote digital or remote display programmer.
b. transmissometer projector와 receiver는 서로 250ft 떨어진 탑들에 설치되어 있다. 특정 강도의 빛이 projector에서 방출된 다음 receiver가 이를 측정된다. obscuring matter(예를 들어 비, 눈, 먼지, 안개, 연무, 혹은 연기)는 receiver에 도달하는 빛의 강도를 감소시킨다. 그 결과 측정된 강도가 signal data converter에 의해 RVR 값으로 변환된다. 이러한 값이 항공 교통 시설의 판독 장비에 표시되며 이는 분당 약 한 번씩 업데이트된다.
c. signal data converter는 현재 사용 중인 high intensity runway edge light의 단계(3, 4, 혹은 5 단계), transmissometer의 측정 값, 그리고 주간/야간 정보를 수신한다. 시스템은 세 개의 정보를 통해 적절한 RVR 값을 계산한다.
d. 250ft 간격의 RVR transmissometer는 최소 600ft부터 3,000ft까지 200ft 단위로, 그리고 3,000ft부터 최대 6,000ft까지 500ft 단위로 디지털 판독 값을 제공한다.
e. Category IIIa 운영을 위한 RVR 값은 700ft까지 연장된다. 그러나 보고 가능한 RVR 값은 600ft와 800ft 뿐이다. 701ft ~ 900ft까지의 범위는 800 RVR으로 보고될 수 있으므로 이는 Category IIIa 운영을 위한 minimum에 유효하다.
f. approach categories에 상응하는 minimum RVR 값은 다음과 같다.(표 7-1-7 참조.)
g. 우세시정이 1마일 이하인 경우 및/혹은 RVR이 6,000ft 이하인 경우 특정 RVR runway에 대한 10분 최대 및 최소 RVR 값이 aviation weather report의 본문에 포함된다. 우세시정이 1마일 이하인 경우 및/혹은 RVR이 6,000ft 이하인 경우 ATCT는 RVR을 보고한다.
h. RVR의 사용 조건에 대한 세부사항은 FAA AC 97-1, Runway Visual Range(RVR)에 수록되어 있다. 조종사는 CFR 및/혹은 운영 기준(operation specification)에서 해당 운항 등급에 대해 규정된 minimums를 준수할 책임이 있다.
i. 또한 RVR 값은 14ft의 섬유 유리 기둥에 장착된 forward scatter meters로도 측정된다. full RVR system은 다음으로 구성된다:
1. Forward scatter meter with a transmitter, receiver and associated items.
2. A runway light intensity monitor(RLIM).
3. An ambient light sensor(ALS).
4. A data processor unit(DPU).
5. Controller display(CD).
j. forward scatter meter는 14ft의 막대기에 장착된다. transmitter에서 적외선이 방출되고 receiver가 이를 수신한다. obscuring matter(예를 들어 비, 눈, 먼지, 안개, 연무, 혹은 연기)는 receiver가 수신하는 산란광(scattered light)의 양을 증가시킨다. receiver의 측정값, RLIM의 입력, 그리고 ALS의 입력이 DPU로 전달되어 적절한 RVR 값이 계산된다. RVR 값이 관제사의 화면에 표시된다.
k. runway light intensity monitor는 runway edge light와 centerline light의 설정 단계(1 ~ 5단계)를 측정한다. centerline light의 설정 단계는 CAT IIIb 운영을 위해 사용된다. Edge Light의 설정 단계는 CAT I, II, 그리고 IIIa 운영을 위해 사용된다.
l. New Generation RVR은 Category IIIb 운영의 minimums(150ft RVR)까지 RVR을 측정 및 표시할 수 있다. RVR 값은 100ft 단위로 표시되며 다음과 같이 보고된다:
a. ceiling은 “broken”이나“overcast”로 보고된 구름층의 높이이거나 “obscuration”으로 보고된 시정 장애 현상의 높이이다. TAF(aerodrome forecast)에 표시되는 구름은 지상으로부터의 높이(AGL)를 나타낸다. 반면 area forecast에 표시되는 구름은 평균 해수면으로부터의 높이(MSL)를 나타낸다.
REFERENCE -
AIM, Paragraph 7-1-28, Key to Aerodrome Forecast(TAF) and Aviation Routine Weather Report(METAR), defines “broken,” “overcast,” and “obscuration.”
CEILING - "broken", "overcast", 혹은 "obscuration"으로 보고되었으며 "thin"이나 "partial"로 분류되지 않는 가장 낮은 구름 층이나 시정 장애 현상(AGL).
CEILING[ICAO] - 6,000m(20,000ft) 아래에서 하늘의 절반 이상을 덮고 있는 가장 낮은 구름 하단의 높이(AGL).
b. 조종사는 주로 고도를 MSL 단위로 보고한다. 왜냐하면 조종사는 고도계를 통해 고도를 결정하기 때문이다. 조종사로부터 받은 정보를 배포 및 적용할 때 이러한 사실이 고려된다. (“Ceiling”은 항상 지상으로부터의 높이이다.) PIREP을 통해 조종사로부터 배포되는 고도의 기준 또한 MSL이다.
c. area forecasts나 inflight advisories에서 ceilings는 “CIG”나“AGL”로 표시된다. 구름 하단이MSL 기준으로 주어질 경우 고도 값 뒤에 “MSL”이나 ”ASL“이 표시된다. 구름 상단, 결빙 고도, 착빙, 그리고 난기류는 항상 ASL이나 MSL로 주어진다.
a. METAR reports에서 보고되는 지상(수평) 시정은 법정 마일이다. 이는 1/16, 1/8, 3/16, 1/4, 5/16, 3/8, 1/2, 5/8, 3/4, 7/8, 1, 1 1/8 등등의 단위로 증감한다(unaugmented automated site에서 보고되는 시정은 manual report와 다르게 보고된다. 예를 들어, ASOS/AWOS: 0, 1/16, 1/8, 1/4, 1/2, 3/4, 1, 1 1/4, 1 1/2, 1 3/4, 2, 2 1/2, 3, 4, 5, 등등. AWOS: M 1/4, 1/4, 1/2, 3/4, 1, 1 1/4, 1 1/2, 1 3/4, 2, 2 1/2, 3, 4, 5, 등등). 시정은 관측 지점으로부터 특정 거리에 놓인 미리 선정해둔 물체를 보고 식별할 수 있는 능력을 통해 결정된다. 7마일 미만으로 결정된 시정은 차폐 대기조건(예를 들어 안개, 연무, 연기, 혹은 이들의 조합 등등)의 존재를 나타낸다.
b. 우세 시정(prevailing visibility)은 수평 원의 최소 절반 이상(단, 반드시 연속될 필요는 없음)을 포함하는 가장 높은 시정이다. 시정이 상당히 다른 수평 원의 일부분이 weather report의 remarks에서 보고될 수 있다. 즉, 수평 원의 남동쪽 사분면이 박무로 인해 2마일로 결정될 수 있는 반면 남은 사분면들은 박무로 인해 3마일로 결정될 수 있다.
c. 일반적인 관측 지점이나 관제탑에서의 우세 시정이 4마일 미만인 경우 두 값들 중 낮은 수치가 항공기 운영을 위한 우세 시정으로 사용된다.