Crosswind Approach and Landing
대부분의 활주로에 착륙할 때 바람은 착륙 방향으로부터 평행하지 않다. 모든 조종사는 측풍 상황을 대처하는 방법을 준비해야 한다. 정상 접근 및 착륙과 연관된 기본적인 원칙과 요소들이 측풍 접근 및 착륙에서도 동일하게 적용된다. 따라서 여기에서는 편류를 보상하는데 필요한 추가적인 절차만을 논의한다.
측풍 착륙은 측풍 이륙보다 조금 더 어렵다. 속도가 감소하는 동안 비행기의 정확한 제어를 유지하는데 필요한 조종간 입력이 이륙(이 경우에는 속도가 증가함)과는 다르기 때문이다.
측풍 접근 및 착륙을 위한 두 가지 방법이 있다 – crab method와 wing-low(sideslip) method. crab method는 final approach 도중 조종사가 쉽게 유지할 수 있는 방법이긴 하나 착륙 직전에 crab을 풀 판단력과 타이밍을 필요로 한다. crab method와 wing-low method가 함께 사용될 수도 있긴 하지만 대부분의 경우 wing-low method가 권장된다. 현재의 시험 표준은 두 가지 방법을 모두 허용하며 조종사는 두 가지 방법을 모두 배워야 한다.
Crosswind Final Approach
crab method를 사용할 경우 조종사는 바람을 향한 heading(crab)을 설정하기 위해 삼타일치 선회를 수행해야 한다. 설정된 heading은 비행기의 지상 경로를 활주로의 중심선과 정렬시켜야 해야 한다. 활주로 정렬을 유지하기 위해 조종사는 미세한 heading 수정을 수행해야 한다. [그림 9-15] 착륙 직전에는 rudder를 통해 비행기의 세로축을 활주로에 정렬함으로써 바퀴가 활주로에 비스듬히 닿지 않도록 해야 한다. 이러한 세로축 정렬이 너무 이르게, 혹은 너무 늦게 이루어지면 가로 하중(side load)이 발생한다. 긴 거리의 final approach를 수행 중이라면 crab method를 사용하여 접근한 다음 round out 전에 wing-low method로 부드럽게 전환하는 것이 하나의 방법이다.

wing-low(sideslip) method 또한 측풍을 보상하는 기동이다. 그러나 wing-low는 final approach, round out, touchdown, 그리고 after-landing roll 도중 비행기의 지상 경로와 비행기 세로축이 활주로 중심선에 정렬되도록 만든다. 이는 비행기가 옆으로 움직이면서 착지하여 landing gear에 가로 하중이 가해지는 것을 방지할 수 있다. 처음에는 bank angle이 가해진 상태로 착륙하는 것이 이상하게 느껴질 수 있다. 일부 조종사들은 풍상 쪽 wingtip이 지면에 부딪힐 것처럼 보인다 말하지만 실제로는 그렇지 않다. wing-low method는 진즉에 측풍 수정을 설정해두기 때문에 착륙 직전 heading 변화를 필요로 하지 않으며 조종사가 부드럽고 연속적인 조작을 할 수 있도록 해준다. 이 기술을 사용할 때 지면 근처에서, short final에서, 그리고 활주로에서 조종간 압력이 변화하기 때문에 조종사들은 정밀한 조종을 해야 한다.
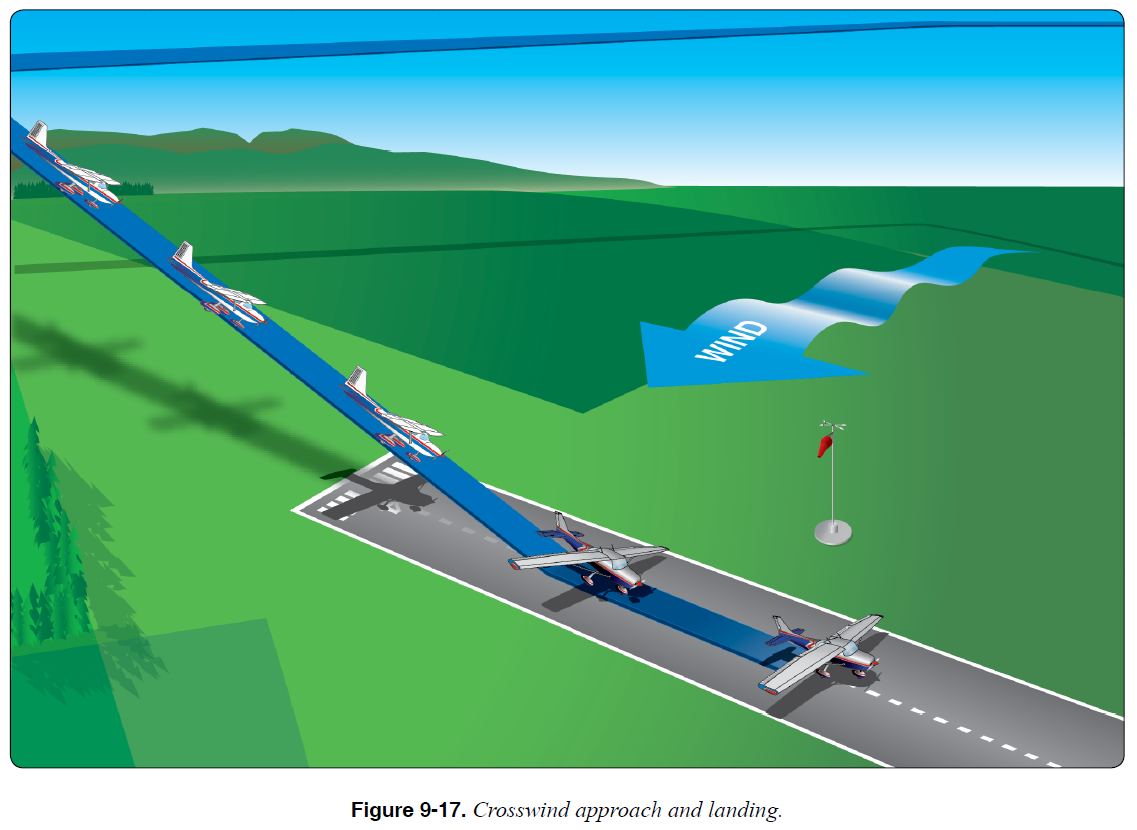
wing-low를 사용하기 위해 조종사는 먼저 rudder를 사용하여 비행기의 heading을 활주로 방향과 정렬한다. 비행기는 이제 측풍에 노출되어 있기 때문에 편류하기 시작한다. 편류하는 방향과 속도를 확인한 다음 편류를 상쇄할 정도로 충분한 aileron을 적용한다. [그림 9-16] 조종사는 bank 양을 변화시킴으로써 왼쪽이나 오른쪽으로 편류할 수 있으며 필요한 경우에는 조종간 압력을 조절함으로써 활주로 중심선을 교차 및 유지할 수 있다. 측풍이 변하면 sideslip을 조절하여 비행기가 활주로 중심에 유지되도록 만든다. [그림 9-17]

강한 측풍을 수정하기 위해선 풍상쪽 날개를 낮춤으로써 바람을 향한 slip을 증가시켜야 한다. 그 결과 비행기가 선회하려는 경향이 더욱 커질 것이다. 선회를 방지하기 위해, 그리고 비행기 세로축과 활주로 정렬을 유지하기 위해 상당한 rudder를 적용해야 한다. 일부 비행기에서는 steep bank로 인한 강한 선회 경향을 최대 rudder로도 보상하지 못할 수 있다. 만약 필요한 bank의 양이 최대 rudder로도 선회를 막지 못할 정도라면 안전하게 착륙하기엔 바람이 너무 강한 것이다. 비행기의 능력이 초과되었으므로 해당 공항의 보다 유리한 활주로나 교체비행장에서 착륙이 이루어져야 한다.
대부분의 접근 도중 flap이 사용된다. 왜냐하면 flap은 비행기를 안정시키는 효과를 가져오기 때문이다. flap을 연장하는 양은 비행기의 조작 특성과 풍속에 따라 달라진다.
Crosswind Round Out(Flare)
round out은 보통 정상 착륙 접근처럼 이루어진다. 그러나 편류를 막기 위해 측풍 수정을 계속 적용해야 한다.
round out이 진행됨에 따라 속도가 감소하기 때문에 조종면은 점차 덜 효율적이게 된다. 때문에 초기에 유지하고 있던 측풍 수정량이 불충분해진다. wing-low를 사용할 때 적절한 편류 수정량을 유지하기 위해선 점진적으로 rudder와 aileron을 증가시켜야 한다.
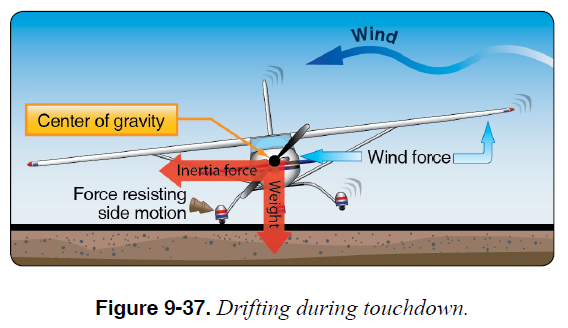
round out 도중 풍상 쪽 날개를 아래로 유지한다. 만약 날개가 수평이 되면 비행기가 편류하면서 착륙하게 된다. 주목적은 가로 하중 없이 비행기를 착륙시키는 것이다.
Crosswind Touchdown
final approach 및 round out 도중 편류 수정을 위해 crab을 사용하였다면 착지 직전에 비행기의 세로축과 이동 방향이 정렬되도록 rudder를 적용하여 crab을 풀어주어야 한다.
만약 wing-low를 사용하였다면 round out 도중 측풍 수정이 유지되어야 하며 풍상 쪽 main wheel이 먼저 활주로에 닿아야 한다. 돌풍이나 강풍 조건에서는 착지 도중 비행기가 편류하지 않도록 측풍 수정을 신속하게 조절해야 한다. 첫 번째 main wheel 닿은 후 가속도가 줄어듦에 따라 비행기 무게로 인하여 풍하 쪽 main wheel이 활주로에 닿는다.
nose-wheel steering과 rudder가 연결된 비행기의 경우 main wheels이 활주로에 닿았을 때 nose-wheel은 활주로와 연장되어 있지 않다. 왜냐하면 측풍 수정을 위해 반대쪽 rudder를 가하고 있기 때문이다. nosewheel이 틀어진 방향으로 비행기가 휘는 것을 방지하기 위해선 nose-wheel이 활주로에 닿을 때 rudder를 풀어주어야 한다.
Crosswind After-Landing Roll
after-landing roll 도중 rudder나 nose-wheel steering을 사용하여 방향 제어를 유지함과 동시에 aileron을 통해 풍상 쪽 날개가 들리지 않도록 주의해야 한다. 공중에 있는 항공기는 현재 유지하는 heading과 speed에 상관 없이 공기와 함께 움직인다. 지상에 있는 항공기는 공기(측풍)와 함께 움직일 수 없다. 왜냐하면 바퀴의 지면 마찰로 인한 저항 때문이다.
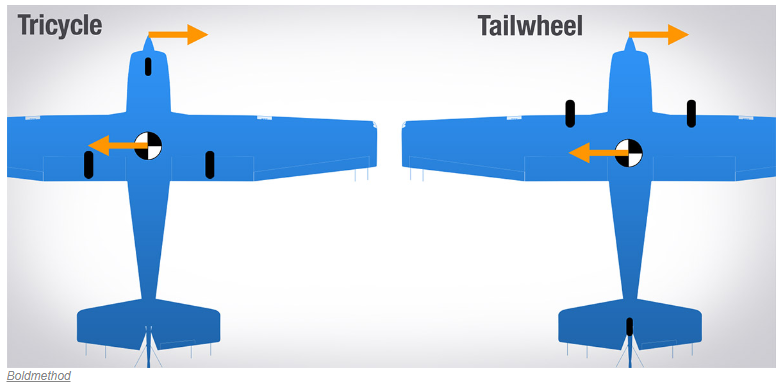
main landing gear를 기준으로 비행기의 뒷부분 측면 면적은 앞부분 측면 면적보다 더 넓다. main wheel은 중심점의 역할을 하며 이 지점의 뒷부분은 측풍에 노출되는 넓은 측면을 가지기 때문에 비행기는 바람을 향하여 weathervane 하려는 경향을 보인다.
after-landing roll 도중 비행기에 작용하는 상대풍은 두 가지 요소의 결과이다. 첫 번째 요소는 자연풍으로 이는 공기가 이동하는 방향에서 작용한다. 자연풍은 비행기의 지상 경로를 따라 작용하는 정풍 성분과 지상 경로의 90도 지점에서 작용하는 측풍 성분으로 구성된다. 두 번째 요소는 비행기가 전진하여 발생하는 바람으로 이는 이동 방향의 반대 방향에서 작용한다. 상대풍은 이 두 가지 요소의 결과이며 이 두 요소 사이 어딘가에 있는 방향으로부터 작용한다. 비행기의 groundspeed가 빠를수록 상대풍이 비행기의 기수쪽으로 정렬된다. after-landing roll 도중에는 비행기의 전방 움직임이 감소함에 따라 상대풍의 정풍 성분이 감소하므로 상대풍은 측풍 성분쪽으로 정렬된다. 측풍 성분이 클수록 weathervaning을 방지하는 것이 더 어려워진다(특히 tailwheel airplane의 경우).
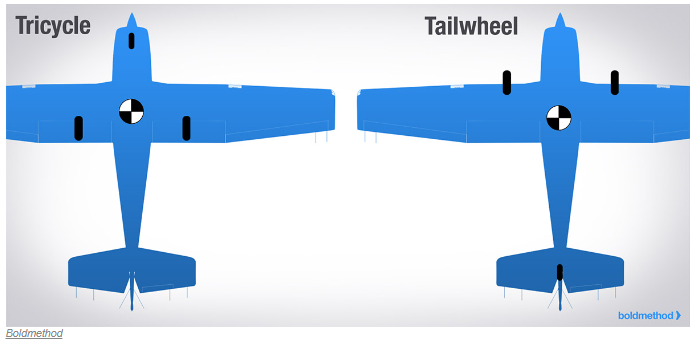
weathervaning effect 때문에 지상에서 제어를 유지하는 것은 after-landing roll의 중요한 부분이다. 또한 편류 도중 활주로에 착지할 때 발생하는 가로 하중은 tricycle-geared airplane에 “roll-over”를 유발할 수 있다. 이는 하나의 main wheel이 지면으로부터 들어올려진 후에 비행기가 nose-wheel과 남은 main wheel 사이의 축을 따라 앞으로 기울어질 때 발생한다. roll-over로 인해 날개 끝이나 프로펠러가 지면에 닿을 수 있다. 이와 관련된 기본 요소들은 cornering angle과 side load이다.
cornering angle이란 타이어가 향하는 방향과 타이어 경로 간의 각도 차이이다. 타이어의 경로와 방향이 틀어질 때마다 가로 하중이 발생하며 이는 타이어를 변형시킨다. 가로 하중은 타이어의 종류와 공기압에 따라 달라지지만 속도와는 완전히 무관하다. 그리고 가로 하중은 상당한 범위 내에서 타이어가 지탱하는 무게와 cornering angle에 정비례한다. cornering angle이 10도만 증가해도 타이어가 지탱하는 무게의 절반에 해당하는 가로 하중이 발생한다(20도 이후에는 cornering angle이 증가해도 가로 하중이 증가하지 않는다). high-wing, tricycle-geared airplane는 roll-over가 불가피한 cornering angle을 가지고 있다. 이보다 낮은 각도에서는 ailerons, rudder, 혹은 steerable nose-wheel을 통해 roll-over를 피할 수 있다(단, 브레이크는 사용할 수 없음).
after-landing roll 도중 비행기가 감속하는 동안 풍상 쪽 날개가 떠오르는 것을 막기 위해 aileron을 점점 더 적용한다. 비행기가 감속하고 있기 때문에 ailerons 주위의 공기 흐름이 적어지므로 ailerons의 효율성이 저하된다. 이와 동시에 상대풍이 점점 측풍쪽으로 정렬되어 풍상 쪽 날개에 더 큰 상승력을 가한다. 비행기가 정지할 때 aileron은 바람쪽으로 완전히 가해져야 한다.
Maximum Safe Crosswind Velocities
특정 측풍 조건에서는 이착륙이 권장되지 않는다. [그림 9-18] 엄청난 편류 수정을 해야 할 정도로 측풍이 강하다면 착륙이 위험해질 것이다. 따라서 지표면 바람 조건과 착륙 방향을 통해 이착륙이 가능한지를 고려해야 한다.
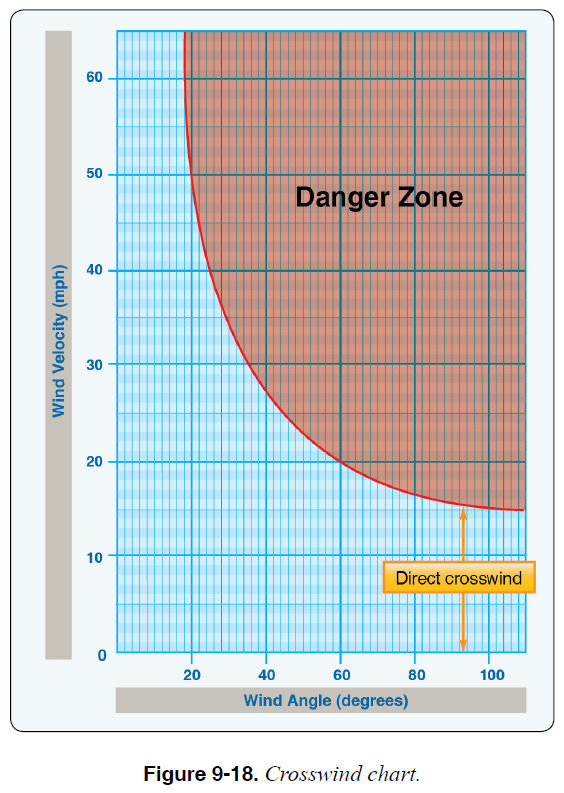
비행기는 FAA로부터 형식 증명(type certificate)을 받기 전에 특정 조건에 대한 시험 비행을 거친다. 여기에는 0.2VS0 이하의 90도 측풍에서 조종사의 특별한 기술 없이도 비행기가 만족스럽게 제어될 수 있음을 증명하는 것이 포함된다. 이는 power off 및 landing configuration인 비행기 실속 속도의 2/10에 해당하는 풍속을 의미한다. 1962년 5월 3일 이후에 증명된 비행기의 placard에는 demonstrated crosswind velocity가 포함되어 있다.
특정 조건에 대한 정풍 성분과 측풍 성분은 crosswind component chart를 통해 결정된다. [그림 9-19] 조종사들은 본인이 비행하는 비행기의 최대 측풍 성분을 알아야 한다. 또한 비행기의 능력을 초과하는 바람 조건에서는 비행을 피해야 한다.

※ 다음은 대한항공 계기비행 교재를 발췌한 내용이다.
3. Wind Application
1) 비행계획단계
- Steady Wind를 적용함을 원칙으로 한다. (ETOPS 비행 제외)
2) 비행단계
- 이륙 공항: 항공기 이륙시점을 기준으로 Max Wind(Gust 포함)를 적용한다.
- 착륙 공항: Tower Contact 시점부터 1000feet(HAT/HAA) 도달 전에 Tower Wind를 기준한 Max Wind(Gust 포함)를 적용하여 접근 계속 여부를 결정한다. Final Approach Speed는 No Wind 때 VREF + 5, Wind가 있는 때 일반적으로 VREF + 1/2 H/D Wind + Gust Factor를 유지한다(이는 해 기종 별 절차에 따라 다르다).
3) 적용 방법
- holding fix를 통과하기 전에 inbound track이 설정되도록 바람을 보상하기 위해선 heading과 timing을 적절히 감안해야 한다.
★ WCA = CROSS WIND SPEED × 60 / TAS
● Cross Wind Component를 구하는 방법
- The 30º cross wind component is 1 / 2 of 90º cross wind
- The 45º cross wind component is 7 / 10 of 90º cross wind
- The 60º cross wind component is 9 / 10 of 90º cross wind
예) Runway Heading 360°, Winds 30kts,
- Wind Direction 030°: cross wind component is 15kts
- Wind Direction 045°: cross wind component is 21kts
- Wind Direction 060°: cross wind component is 27kts
- Wind Direction 090°: cross wind component is 30kts
● True airspeed 구하는 방법
- Mach number indicator: Mach No. ×10 ×60 = TAS
- Indicator airspeed(IAS): TAS(True airspeed)는 고도 1,000ft 상승할 때마다 약 IAS의 2%씩 증가한다
정확한 drift angle을 구하려면: wind drift angle이 10 이상인 때에는 TAS대신에 effective true airspeed로 계산하면 보다 정확한 wind drift 값을 구할 수 있다. 그러나 effective true airspeed에 의한 영향을 미소한 양이므로 무시하고 비행하여도 큰 지장은 없다. effective true airspeed도 위와 같은 수학적 방법으로 계산할 수 있다.
4) 적용 실례
- Gust Wind의 방향이 통보되지 않을 경우에는 Steady Wind와 같은 방향으로 적용한다. (예: 030/12 Gust 22)
- Steady & Gust Wind 방향이 Variable로 통보되는 경우에는 Crosswind/Tailwind에 각각 가장 불리한 방향을 적용한다. 단, Wind 4 kts 미만의 VRB로 통보되는 경우는 예외로 한다(예: 320/12 Gust 22 VRB300 - 030).
예를 들어 B-737 Crosswind Limit 적용 시,
"조건" - Runway Heading 330°, Wind 17kts, Direction 020° Gust 30kts, Braking Action - Medium인 경우
"결과" - Wind Angle 50°와 Wind Speed 30kts로 Crosswing Component는 23kts이다. 그러므로 B737의 Crosswind Limit(20kts)를 초과하게 된다.
- Max Wing Limit 산출 시에는 Required Field Length에 포함되는 부분 중에서 가장 나쁜 Braking Action을 적용한다.
4) Auto Land Wind Limitations
- Auto landing 시 각 기종 별 Wind Limitations와 Auto Land Wind Limitation을 비교하여 낮은 수치를 적용한다.
Common Errors
측풍 접근 및 착륙 도중 발생하는 일반적인 오류는 다음과 같다:
1. 비행기의 maximum demonstrated crosswind component를 초과하는 측풍에서 착륙을 시도함.
2. base leg에서 final approach로 선회 도중 undershoot, 혹은 overshoot.
3. final approach 도중 편류 수정이 불충분함.
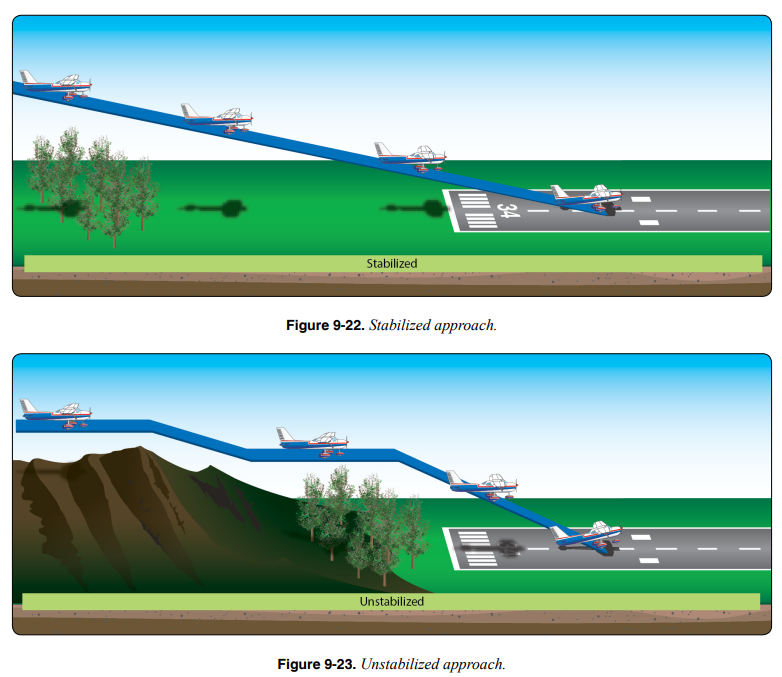
4. Unstable approach.
5. sideslip 도중 항력이 증가하고 수직 양력이 감소하여 속도가 너무 낮아지거나 침하율이 너무 과도해짐.
6. 활주로와 세로축이 정렬된 상태로 착륙하지 못함.
7. 편류 도중 착륙함.
8. 과도한 속도로 착륙함.
9. rollout 도중 적절한 조종간 입력을 적용하지 못함.
10. rollout 도중 방향 제어를 유지하지 못함.
11. 과도한 제동을 적용함.
12. 항공기 제어를 상실함.
'Airplane Flying Handbook(2021) > 9: Approaches and Landings' 카테고리의 다른 글
| (4) Go-Arounds (Rejected Landings) (0) | 2022.11.15 |
|---|---|
| (5) Intentional Slips (0) | 2022.11.15 |
| (7) Turbulent Air Approach and Landing (0) | 2022.11.15 |
| (8) Short-Field Approach and Landing (0) | 2022.11.15 |
| (9) Soft-Field Approach and Landing (0) | 2022.11.15 |