Power-Off Accuracy Approaches
Power-off accuracy approach and landings는 특정 패턴, 그리고 엔진 idle 상태를 사용하여 특정 지점(혹은 그 지점으로부터 지정된 거리 이내)에 착지하도록 활공하는 것을 포함한다. 이 목적은 출력 없이 안전하게 착륙하는데 있어 비행기를 정확하게 비행하는데 필요한 판단과 절차를 조종사에게 심어주는 것이다.
비행기가 착륙까지 활공하는 거리를 측정하는 능력은 power-off accuracy approaches and landings의 실제 기반이다. 다루어져야 할 거리는 주어진 고도로부터 접근을 완료하는데 필요한 기동의 양을 결정한다. power-off accuracy approaches는 aiming point를 향한 적절한 활공 각도와 속도를 설정 및 유지하기 위하여 조종사가 다양한 기술을 사용할 것을 요구한다.
경험과 연습을 통해 대략 1,000ft까지의 고도를 상당히 정확하게 측정할 수 있다. 그러나 이 이상의 고도에서는 모든 특징들이 어우러지려는 경향이 있기 때문에 지상으로부터의 높이 판단 정확도가 떨어진다. 이 고도 이상에서 높이를 판단하는 능력을 완전하게 하는 데 있어 가장 좋은 방법은 고도계 지시를 지구의 일반적인 모습과 연관시키는 것이다.
고도를 1ft, 100ft, 혹은 1,000ft 단위로 판단하는 것은 활공 각도와 그에 따른 거리를 측정하는 능력만큼 중요하지 않다. 비행기의 정상 활공 각도를 아는 조종사는 고도에 상관 없이 주어진 지상 경로로부터 비행기가 착륙할 대략적인 지점을 합당한 정확도로 추정할 수 있다. 고도를 정확히 측정할 수 있는 능력을 갖춘 조종사는 활공 도중 어느 정도의 기동이 가능한지를 판단할 수 있다. 이는 실제 비상 상황에서 착륙 지역을 선택하는데 있어 중요하다.
훌륭한 최종 접근의 목적은 지정한 aiming point에 비행기가 도달하는 각도로 하강하는 것이다. 이는 예측 가능한 float로 이어진다. 이를 위해 하강 각도와 속도를 모두 정확하게 제어하는 것이 필요하다.
출력 설정이 가변적인 정상 접근과는 달리 power-off approach 출력은 idle 설정으로 고정된다. 속도 제어를 위해 pitch 자세가 조절된다. 이는 또한 활공, 혹은 하강 각도를 변화시킨다. 만약 best glide보다 높은 속도로 비행기가 접근하고 있다면 pitching down은 속도를 증가시키고 하강 각도를 가파르게 만들 것이다. 반면에 pitching up은 속도를 감소시키고 하강 각도를 얕게 만들 것이다. 반대로 만약 best glide보다 낮은 속도로 비행기가 접근하고 있다면 pitching down은 속도를 증가시키고 하강 각도를 얕게 만들 것이다. 반면에 pitching up은 속도를 감소시키고 하강 각도를 상당히 가파르게 만들 것이다. 만약 속도가 너무 높으면 조종사는 nose를 들어야 한다. 만약 속도가 너무 낮으면 nose를 내려야 한다. 만약 pitch 자세를 너무 높게 든다면 비행기는 저속, 그리고 불충분한 양력으로 인해 빠르게 가라앉는다. 이러한 이유로 인해 원하는 착륙 지점에 도달하기 위하여 활공을 늘리려고 시도해서는 안 된다.
특정 single-engine turboprop airplanes는 출력이 idle로 설정될 경우 과도한 하강률을 겪는다는 점에 유의한다. 어떤 제조업체의 체크리스트는 엔진 고장의 경우 power-off glide 도중 프로펠러를 feathering 하도록 요구한다. 이러한 비행기로 훈련하는 동안 프로펠러는 비상 상황, 혹은 실제 power-off glide처럼 feather 되지 않는다. 훈련 및 pilot certification 도중 조종사는 propeller feather로 예상될 수 있는 성능을 제공하는 출력으로 설정해야 한다.
획일적인 접근 패턴(예를 들어 90도, 혹은 180도 power-off approaches)들이 이 장에서 자세히 설명된다. 이러한 접근 방식은 조종사에게 활공 거리를 판단하는 것, 그리고 접근을 계획하는 것에 대한 기초를 제공한다. 정사각형 패턴은 좋은 계획이긴 하나 모든 접근에 대해 적합하지 않을 수 있다. 예를 들어, 상황이 예상과 다를 경우 조종사는 활주로로부터 멀리, 혹은 활주로를 향해 선회해야 할 수 있다. 조종사는 남은 접근을 안정화하기 위해, 원하는 aiming point에 적절한 속도로 도달하기 위해, 그리고 계획한 대로 착지하기 위해 S-turns, slips, flaps를 이르게(혹은 늦게) 연장, best glide 이하로 감속, 혹은 정풍을 향하여 best glide 이상으로 증속을 사용할 수 있다. runway numbers를 착지 지점으로 선택할 경우 기계적 문제, 혹은 오판으로 인한 안전 대비책이 제공되지 않는다. 활주로로부터 더 멀리 떨어진 지점을 선택하면 안전 여유가 증가한다.
이러한 접근의 기본적인 절차는 특정한 고도에서 throttle을 닫고 key position을 향해 활공하는 것을 포함한다. throttle을 닫을 때마다 동일한 에너지(속도 및 고도)로 시작함으로써 기동이 보다 예측 가능하게 만든다. key position은 패턴 그 자체와 마찬가지로 주요 목표가 아니다. key position은 단지 원하는 지점에 착륙하기 위해 조종사가 무엇을 해야 하는지 판단할 수 있는 편리한 지점일 뿐이다. 선정한 key position은 사용 가능한 고도와 바람 조건에 적합한 위치여야 한다. key position에서 조종사는 끊임없이 상황을 평가해야 한다.
비록 정확한 지점에서 착지하는 것도 중요하긴 하나 안전하고 적절하게 수행되는 접근 및 착륙이 필수적이라는 점이 반드시 강조되어야 한다. 조종사는 원하는 지점에 착륙하기 위해 훌륭한 접근을 희생해서는 안 된다.
90° Power-off Approach
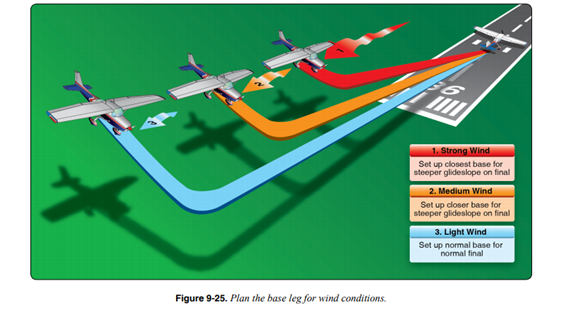
90도 power-off approach는 base에서 수행된다. 이는 final approach를 향한 90도 선회를 필요로 한다. 바람 조건에 따라 활주로 접근 끝단으로부터 base leg를 더 가까이 배치하거나, 혹은 더 멀리 배치함으로써 접근 경로를 변경할 수 있다. [그림 9-25] base의 key position으로부터 final approach를 향한 90도 활공 선회는 모든 accuracy landing maneuvers의 마지막 부분이다. 90도 power-off approach는 일반적으로 지상으로부터 대략 1,000ft에서, 혹은 정상적인 장주 패턴 고도에서 rectangular pattern으로 시작된다. 정상 장주 패턴과 동일한 간격으로 착륙 지점으로부터 downwind를 비행한다. downwind leg에서 before-landing checklist가 완료되어야 한다(만약 비행기가 retractable gear를 장비한 경우 landing gear의 연장 포함).
base leg를 향하여 medium-bank 선회를 완료한 이후 throttle을 약간 줄여서 속도가 normal base-leg speed로 감속하게 만든다. [그림 9-26] base leg에서 45도 key position으로 진행하는 동안 속도, 편류 수정, 그리고 고도를 유지한다. 의도하였던 착륙 지점은 45도 key position에서 비행기의 nose로부터 45도에 있는 것처럼 보인다.

지상 경로를 유지하기 위해 base leg에서 사용하였던 crab의 양을 통해 조종사는 풍향 및 풍속을 결정할 수 있다. 이는 final approach를 향한 선회 계획에 도움이 된다. 그리고 flaps를 연장할 시기를 나타내는 지표를 제공한다.
45도 key position에서 throttle을 완전히 닫고, propeller control(만약 장착 시)을 최대 rpm으로 전진하며, 제조업체의 권장 활공 속도로 감속될 때까지 고도를 유지한다. 권장 속도가 없다면 조종사는 1.4Vs0를 사용해야 한다. 이 속도가 얻어졌다면 활공 속도 유지를 위해 nose를 낮추고 조종간을 trim 한다. wing flaps를 점진적으로 연장할 수 있으며 필요한 경우 pitch 자세를 조절하여 적절한 하강 각도를 설정한다. base-to-final turn으로부터 roll out 하였을 때 비행기가 활주로 중심선에 연장되도록 선회를 계획 및 수행한다. 현재 상태에서 접근이 약간 높게 계획될 경우 조종사는 aiming point를 확실하게 만들어낼 것이다. 필요한 경우 wing flaps를 연장할 수 있다. 또한 필요한 경우 pitch 자세를 조절하여 적절한 하강 각도와 속도(1.3Vs0)를 설정할 수 있다. 필요에 따라 pitch 자세를 약간 조절하거나, 혹은 slips를 사용하여 속도와 하강 각도를 제어한다. 원하는 비행경로를 유지하기 위해 crab, 혹은 side slip이 사용될 수 있다. 속도 변화 없이 하강을 가파르게 만들기 위해 forward slip이 순간적으로 사용될 수 있다. full flaps를 연장하여도 착지 지점에 도달할 수 있다는 것이 명확해지기 전까지는 full flaps의 사용을 연기해야 한다. 원하는 착륙 지점에 도달하기 위해 활공을 늘리거나, 혹은 flaps를 올리려고 시도해서는 안 된다.
short final에서는 의도하였던 착륙 지점에 집중하기보다는 안전하고 훌륭한 착륙에 주의를 기울인다. 사용된 접근 각도, 그리고 최종 접근 속도가 해당 지점에 착륙할 확률을 결정하며 이러한 변수들을 뒤늦게 조정하는 것은 적절하지 않다. 정확히 의도하였던 지점에서 좋지 못한 착륙을 하기보다는 그 지점으로부터 좀 떨어진 곳에서 훌륭한 착륙을 하는 것이 더 낫다.
180° Power-Off Approach
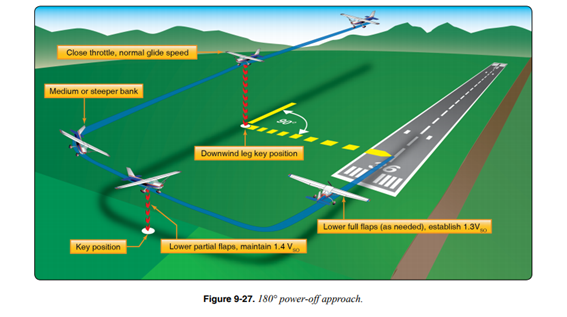
180도 power-off approach는 downwind 구간의 특정 지점으로부터 기선정해둔 착륙 지점까지 idle 출력으로 활공하여 수행된다. [그림 9-27] 이 기동은 이전에 설명한 90도 power-off approach와 연관된 원칙들의 연장선에 있다. 그 목표는 비행기가 높은 고도에서 출력 없이 비행하는 것, 그리고 90도 power-off approach를 수행하기 위한 적절한 고도에서 base-leg 위치에 도달하기 위해 90도 선회를 하는 것을 통해 거리 및 활공비를 측정하는 판단을 더욱 발전시키는 것이다.
180도 power-off approach는 90도 power-off approach보다 더 많은 계획과 판단이 필요하다. 180도 power-off approaches를 수행하기 위해 활주로에 평행한 downwind heading을 비행한다. 이러한 유형의 접근이 시작되는 고도는 비행기의 형식에 따라 다르지만 일반적으로 지상으로부터 1,000ft를 초과해서는 안 된다(단, 대형 비행기 제외). 높은 고도에서는 판단과 기동의 정확도가 더 높아야 한다.
원하는 착륙 지점의 반대편에 도달하였을 때 throttle을 닫는다. 제조업체의 권장 활공 속도, 혹은 1.4 Vs0로 감속하는 동안 고도를 유지한다. throttle을 닫는 지점이 downwind key position이다.
downwind 구간에서 base 구간으로 수행하는 선회는 medium, 혹은 약간 더 가파른 bank로 이루어진다. bank의 각도, 그리고 선회의 양은 비행기의 활공 각도, 그리고 풍속 및 풍향에 따라 달라진다. 다시 말하지만 base 구간은 고도나 바람 조건에 따라 적절한 위치에 배치된다. 원하는 착륙 지점에 도달하기 위해 고도를 보존하거나, 혹은 소멸시킬 수 있도록 base 구간을 배치한다.
비행기가 90도 power-off approach의 base key position으로 활공할 수 있을 정도로 충분히 높을 때, 그리고 충분히 가까울 때 base 구간을 향하여 선회한다. 만약 필요하다면 base key 이전에 flaps를 연장할 수 있다.
base key position은 중요하긴 하나 지나치게 강조되어선 안 된다. 또한 이를 지상의 고정된 지점으로 간주하여서도 안 된다. 경험이 부족한 조종사들은 특정 고도에 도달하기 위해 특정 지형지물(예를 들어 나무, 교차로, 혹은 그 기타 시각 참조물)로부터 base key position 개념을 얻을 수 있다. 이러한 오해는 그러한 물체가 존재하지 않을 때마다 조종사를 완전히 쩔쩔매게 만든다. 이러한 오해를 없애기 위해선 고도, 그리고 지리적 위치가 실질적으로 변화되어야 한다. base key position에 도달한 이후에는 90도 power-off approach와 같은 방법으로 접근 및 착륙을 수행한다.
Common Errors
power-off accuracy approach의 수행에 있어 일반적인 실수는 다음과 같다:
1. downwind 구간이 활주로/착륙 지점으로부터 너무 멂.
2. 배풍으로 인해 downwind가 너무 길어짐.
3. base 구간에서의 편류 보정 불충분.
4. 활공 거리를 증가시키기 위한 노력으로 인하여 skidding turns.
5. retractable gear airplanes에서 landing gear를 내리지 않음.
6. undershoot 도중 활공을 늘리려고 시도.
7. 너무 이른 flap/landing gear 연장.
8. 활공을 증가시키기 위해 throttle 사용(엔진을 clear 하기 위해 사용하는 것은 괜찮음).
9. 원하는 착륙 지점에서 벗어나는 것을 방지하기 위해 비행기를 강제로 활주로로 향하게 만듦.
'Airplane Flying Handbook(2021) > 9: Approaches and Landings' 카테고리의 다른 글
| (8) Short-Field Approach and Landing (0) | 2022.11.15 |
|---|---|
| (9) Soft-Field Approach and Landing (0) | 2022.11.15 |
| (11) Emergency Approaches and Landings (0) | 2022.11.15 |
| (12) Faulty Approaches and Landings (0) | 2022.11.15 |
| (13) Hydroplaning (0) | 2022.11.15 |