Short-Field Approach and Landing
비교적 짧은 착륙 구역의 경우, 혹은 착륙 구역을 제한하는 장애물의 상공을 통과하여 접근이 이루어지는 경우 short-field approaches and landings를 사용해야 한다. [그림 9-20과 9-21] 이러한 저속 power-on approach는 minimum controllable airspeed 언저리에서의 비행 성능과 밀접하게 관련되어 있다.

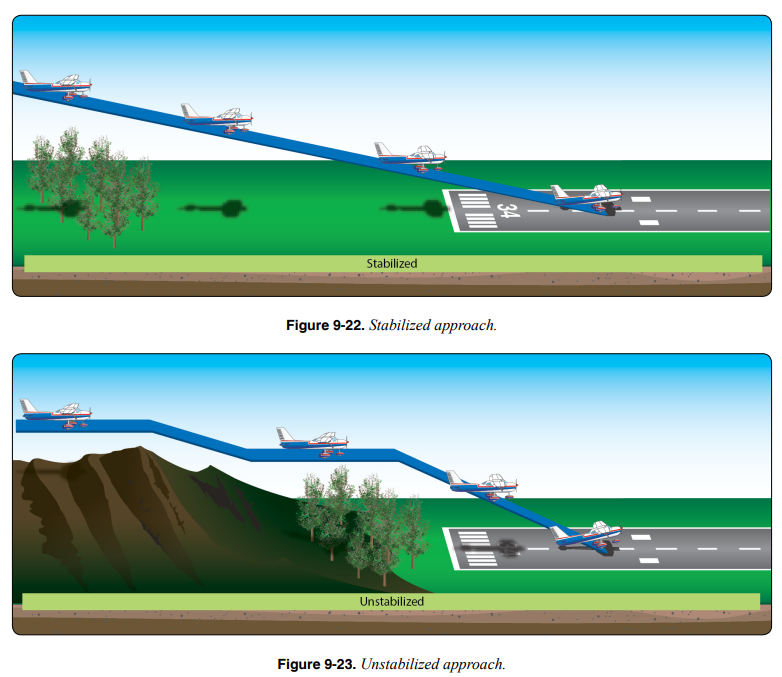
짧은 착륙 구역, 혹은 제한된 구역 내에 착륙하기 위해 조종사는 하강률과 속도를 정밀하게 제어해야 한다. 또한 모든 장애물을 회피하도록, round out 도중 floating이 거의 발생하지 않도록, 그리고 비행기가 최대한 짧은 거리에서 정지할 수 있도록 비행해야 한다. 안전과 상황이 허용될 경우 정상적인 패턴보다 넓은 패턴을 사용함으로써 더 긴 final approach를 수행할 수 있다. 이는 비행기의 외장과 trim이 설정된 후 조종사가 하강 각도를 조정 및 안정화 할 충분한 시간을 제공한다. stabilized approach는 필수적이다.
AFM/POH에서 권장하는 short-field approaches and landings 절차가 사용되어야 한다. [그림 9-22와 9-23] 이러한 절차는 일반적으로 touchdown area로부터 최소 500ft 높이에서 시작되는 final approach를, 그리고 final approach 도중 적절한 지점에서 full flap을 사용하는 것을 포함한다. 이는 full flap 이전의 flap setting을 사용하여 stabilized final approach를 수행해야 함을 의미한다. 착륙 지점이 확인되었다면 조종사는 full flaps를 연장해야 한다. 또한 대기 속도를 유지하기 위해, 그리고 aiming point를 유지하기 위해 기수를 낮춰야 한다. 장애물 상공에서 조종사는 출력을 약간 줄일 수 있다. 이상적으로는, 만약 full flaps가 정확한 지점에서 연장되었다면 서서히 출력을 감소시킬 수 있다. 제조업체의 권장 접근 속도가 없다면 1.3Vs0 이하의 속도를 사용한다. 돌풍이 존재하는 경우 gust factor의 절반 이하를 더한다. 대기속도가 과도할 경우 runway threshold로부터 너무 멀리 떨어져서 착지하거나, 혹은 이용 가능한 착륙 영역을 초과하는 after-landing roll로 이어질 수 있다. 장애물이 존재할 때 약간 가파른 접근 각도를 사용할 경우 항공기가 장애물에 가까이 착륙하여 더 많은 제동 거리가 제공된다.
landing gear를 내린 후(단, 해당하는 경우), 혹은 적절한 final approach가 시작된 후 조종사는 대기속도와 하강 각도를 설정 및 유지하기 위해 power와 pitch를 동시에 조절해야 한다. stabilized approach 도중 대기속도와 하강 각도를 수정할 때 pitch와 power를 미세하게 조정해야 한다.
short-field approaches and landings는 aiming point를 향하여 정확하게 접근하는 절차이다. 앞서 설명하였던 stabilized approach 절차가 사용된다. 만약 장애물을 너무 높게 회피할 경우 aiming point를 훨씬 넘어서 착지하여 정지할 거리가 부족하게 된다. 이 경우 pitch를 낮춤과 동시에 power를 감소시켜 하강 경로를 가파르게 하고 하강률을 높인다. 만약 하강 각도가 안전한 장애물 회피를 보장하지 못할 것으로 보이는 경우 pitch를 듦과 동시에 power를 증가시켜 하강 경로를 얕게 하고 하강률을 감소시킨다. 속도가 지나치게 낮아지지 않도록 주의해야 한다. 높은 받음각에서 낮은 속도로 운영할 때 pitch가 증가하면 하강률이 증가한다. 접근의 결과가 의심될 경우 go-around를 수행하고, 상황을 평가해야 하며, 다른 접근을 수행할지, 혹은 더 적합한 착륙 지역으로 우회할지를 결정해야 한다.
장애물을 통과하는 final approach는 상대적으로 가파른 접근 각도에서, 그리고 실속에 가까운 속도에서 이루어진다. 따라서 지상에 충돌하는 것, 혹은 조기 실속으로 인해 과도하게 침하하는 것을 막기 위해 round out(혹은 flare)이 정확히 판단되어야 한다. flare 도중 floating이 없다는 것은 접근 속도가 정확하였음을 입증한다.
비행기가 대략 power-off stall(throttle idle)로 이어지는 pitch attitude임과 동시 minimum controllable airspeed일 때 착지가 이루어져야 한다. throttle을 너무 빠르게 줄이지 않도록 주의해야 한다. throttle을 닫을 경우 하강률이 즉시 증가하여 hard landing으로 이어질 수 있기 때문이다. 약간의 출력을 통해 elevator에 공기 흐름을 제공할 경우 저속에서도 flare를 수행하기 쉬워진다. 낮은 대기속도, 그리고 windmilling propeller는 elevator로 향하는 공기 흐름을 지연시켜 flare를 어렵게 만들 수 있다.
제조업체가 권장하는 경우 착지 후 elevators의 유효성이 사라지기 전까지 비행기를 positive pitch attitude로 유지한다. 이는 공기역학적 제동을 제공하여 감속을 보조한다. 허나 nose wheel이 바닥에 닿은 후에 최대 제동을 적용하여 after-landing roll을 최소화한다. 대부분의 비행기에서 공기역학적 항력은 touchdown speed의 60에서 70%까지 감속할 때까지 적용된다. 속도와 양력이 감소함에 따라 브레이크가 점점 더 효율적이게 된다. 조종사는 부드럽게 브레이크를 적용함에 동시에 조종간을 뒤로 당김으로써 제동 효율성을 높여야 한다. 강한 제동으로 인해 비행기가 앞으로 기울어지려는 경향이 있기 때문에 back pressure가 필요하다. 최상의 제동 결과는 바퀴가 “incipient skid condition”일 때 이루어진다. 이는 브레이크 압력이 조금 더 높아질 경우 바퀴가 완전히 잠김을 의미한다. 바퀴가 잠겨서 skid가 발생할 경우 제동 효율이 감소하며 타이어가 손상될 수 있다. 비행기는 일반적으로 안전성 및 조종성에 부합하는 최단 거리 내에서 정지한다. 적절한 접근 속도가 유지될 경우 floating이 최소가 되고 minimum control speed에서 착지가 이루어짐으로써 과도한 제동이 필요 없어진다.
Common Errors
short-field approaches and landings를 수행하는데 있어 일반적으로 발생하는 오류는 다음과 같다:
1. 지나치게 가파른 접근 및 높은 하강률을 필요로 하는 final approach를 수행함.
2. Unstable approach를 수행함.
3. 활공 경로를 너무 늦게 수정함.
4. 너무 낮은 속도로 인하여 적절한 flare를 수행하지 못하고 그 결과 hard landing이 발생함.
5. 너무 높은 속도로 인하여 round out 도중 floating이 발생함.
6. round out 도중 너무 이르게 출력을 idle로 줄여서 hard landing으로 이어짐.
7. 과도한 속도로 착지함.
8. 착지 이후 과도한, 그리고/혹은 부적절한 제동을 수행함.
9. 방향 제어를 유지하지 못함.
10. 안전하게 완료될 수 없는 부적절한 접근을 인지 및 중단 하지 못함.
'Airplane Flying Handbook(2021) > 9: Approaches and Landings' 카테고리의 다른 글
| (6) Crosswind Approach and Landing (0) | 2022.11.15 |
|---|---|
| (7) Turbulent Air Approach and Landing (0) | 2022.11.15 |
| (9) Soft-Field Approach and Landing (0) | 2022.11.15 |
| (10) Power-Off Accuracy Approaches (0) | 2022.11.15 |
| (11) Emergency Approaches and Landings (0) | 2022.11.15 |