a. NAS(National Airspace System)의 사용자는 NAVAID의 오작동이나 GNSS 문제를 빠르게 수정하는데 도움을 줄 수 있다. 이들은 적절치 못한 항전 장비 성능에 대해 관찰 결과를 보고하도록 권장된다. NAVAID는 전자탐지기에 의해 모니터링 된다. 허나 지상 모니터가 감지하지 못한 전자 간섭, 새로운 장애물, 혹은 지형 변화의 악영향이 존재할 수 있다. 보고되어야 할 성능 저하, 혹은 오작동은 다음과 같다: course∙bearing의 불규칙한 지시, 간헐적으로∙연속적으로 발생하는 flag alarm, 잘 알아들을 수 없는∙누락된∙부적절한 코드 식별부호, 좋지 못한 교신 수신. 주파수 간섭의 경우에는 무선 교신, 혹은 NAVAID 식별부호에 수반하는 윙윙거리는 소리를 보고한다. GNSS 문제는 일반적으로 항법 성능 저하, 서비스 중단으로 인해 발생한다. 예를 들어 GNSS 간섭이 있는 지역을 운영하는 조종사는 GPS를 사용할 수 없으며 감시를 위해 ADS-B를 사용할 수 없다. 무선 주파수 간섭은 조종사의 항법, 그리고 항공 교통 관제사의 감시에 모두 영향을 미칠 수 있다. 장비에 따라 advisory light, 혹은 메시지가 조종사에게 경고를 보낼 수 있다. ADS-B 보고를 확인하는 항공 교통 관제사는 ADS-B 위치 메시지, 그리고 항공기 track의 수신을 중단할 수 있다.
b. GPS re-radiator systems(GPS 재방사기)는 항공기 정비 도중 사용하기 위한 것이다. 이러한 시스템의 오작동, 결함, 혹은 부적절한 설치∙작동∙개조로 인해 항공기의 GPS 수신기가 의도치 않게 중단될 수 있다. 이러한 유형의 중단은 primary flight displays/indicators, 다른 항공기 시스템, 그리고 항공 교통 관제사 시스템에 잘못된 위치 정보를 나타낼 수 있다. RAIM(Receiver Autonomous Integrity Monitoring)은 이러한 유형의 중단(사실상 “signal spoofing”)에 대해 충분히 효과적이지 못하다. 따라서 조종사는 잘못된 항법 지시를 인지하지 못할 수 있다. ATC만이 이러한 중단을 식별할 수 있는 유일한 수단일 수 있다. IFR 분리를 위해 항공기를 모니터링 하는 동안 ATC는 예상치 못한 항공기 위치를 발견할 수 있다.
c. 항법 문제가 발생한 조종사는 다른 항법 소스로 전환해야 한다. 그리고 필요에 따라 ATC에게 amended clearances를 요청해야 한다.
d. 조종사는 NAVAID의 이상, 혹은 GPS의 이상에 대한 보고서를 최대한 빨리 제출하도록 권장된다. 항법 문제에 대한 조종사 보고서에는 다음 정보가 포함되어야 한다:
1. 이상이 확인된 날짜와 시간. 그리고 NAVAID ID(혹은 GPS).
2. 이상이 시간 및 종료된 시점에서의 항공기 위치(예를 들어 위도/경도, 혹은 기준점으로부터의 bearing/distance).
3. heading, altitude, 항공기 유형(제조업체/형식/호출부호).
4. 사용하였던 항전 장비/수신기의 유형(예를 들어 제조업체/모델/소프트웨어 시리즈나 버전).
5. 해당하는 경우 추적 중인 위성의 수.
6. 이상이 확인된 위치/항법/시기에 대한 설명. 그리고 이상이 지속된 시간.
7. NAVAID(혹은 GPS)의 이상으로 인한 영향.
8. ATC 시설이 제공한 해결책.
9. 비행 후 수행된 정비.
e. 관제 공역 내에서 IFR 하에 운영 중인 조종사는 CFR §91.187을 준수해야 한다. 그리고 비행 도중 발생하는 항법 장비의 오작동을 즉시 ATC에 보고해야 한다. 조종사는 initial reports를 다음과 같이 제출해야 한다:
1. ATC 시설, 혹은 FSS에 즉시 무선 교신한다.
2. 중단이 발생한 공역을 관제하는 가장 가까운 ATC 시설에 전화한다.
3. GPS 문제의 경우 비행 이후 GPS Anomaly Reporting Form을 통해 인터넷으로 보고되어야 한다.
f. ATC 업무량을 최소화하기 위해 testing NOTAM과 관련된 GPS 이상은 ATC에게 보고하지 않는다. 단, 다음과 같은 경우는 제외한다:
1. NOTAM이 발행된 영역 바깥에서 GPS 성능 저하가 발생한 경우.
2. 예상치 못한 결과를 확인한 경우(예를 들어 장비의 고장, spoofing의 의심, 예상치 못한 항공기 시스템의 고장(예를 들어 TAWS)).
2010 DHS Appropriations Act에 따라 USCG(U.S. Coast Guard)는 모든 U.S. LORAN-C 신호 전송을 종료하였다. 또한 USCG는 Russian American 신호와 Canadian LORAN-C 신호도 종료하였다. 운영자들은 TSO-C60b, AIRBORNE AREA NAVIGATION EQUIPMENT USING LORAN-C INPUTS가 취소되었음을 유념해야한다.
a. IRU는 자이로와 가속도계로 구성된 독립형 시스템이다. 이는 시스템 구성요소들의 관성으로 인한 신호에 반응하여 항공기 자세(pitch, roll, 그리고 heading), 위치, 그리고 속도 정보를 제공한다. IRU가 known position과 정렬되면 이는 위치와 속도를 지속적으로 계산한다. IRU의 위치 정확도는 시간이 지남에 따라 감소한다. 이러한 정확도 감소를 “drift”라 부른다.
b. INS는 IRU의 구성 요소들을 항법 컴퓨터와 결합한다. 이러한 시스템은 일련의 waypoints를 프로그래밍하여 미리 결정된 경로를 따라 항행한다.
c. AHRS는 항공기 시스템(예를 들어 weather radar와 autopilot)에 자세 정보를 제공하는 전자 장치이다. 허나 이 장치가 위치 정보를 직접 계산하지는 않는다.
d. slaved compass systems를 갖춘 항공기의 경우 자기장 교란(자속장)에 의해 heading 오차에 취약할 수 있다. 이러한 자속장은 보통 지면에 위치한, 혹은 유도로나 주기장아래에 묻힌 물질들로부터 발견된다. 이러한 물질들은 자속장을 생성하며 항공기의 compass system flux detector는 이를 감지할 수 있다. 그 결과 항공기 시스템이 지구의 자기장이 아닌 물질의 자기장과 정렬될 수 있다. 잘못된 heading이 자체적으로 수정되지 않을 수도 있다. 조종사는 지상 주행도중에 heading 오차가 발생할 수도 있다는 것을 알아야 한다. 이륙을 수행하기 전에 조종사는 제조업체의 절차를 통해, 혹은 그 외 적절한 절차를 통해 heading 오차를 수정해야 한다.
Doppler Radar는 반자동식 독립형 추측 항법 시스템이다(레이더 센서와 컴퓨터로 구성). 이는 지상 보조 시설, 혹은 외부 보조 시설의 정보를 계속적으로 의존하지 않는다. 이 시스템은 레이더 신호를 사용하여 ground speed와 drift angle을 감지 및 측정한다. 그러나 Doppler는 INS보다 덜 정확하다. 그리고 장거리 비행 도중 충분한 위치 정확도를 달성하기 위해선 외부 기준을 사용하여 정기적으로 업데이트를 해야 한다.
1. System Description. Global Positioning System은 우주 기반의 무선 항법 시스템이다. 이는 전 세계 어디에서든 정확한 위치를 결정하는데 사용된다. 전 세계의 사용자가 항상 최소 5개의 위성을 볼 수 있도록 24 satellite constellation이 설계되었다. 수신기가 정확한 3차원 위치를 설정하기 위해선 최소 4개의 위성이 필요하다. 수신기는 mask angle(수신기가 위성을 사용할 수 있는 지평선으로부터의 가장 낮은 각도) 이상에 놓인 위성의 정보를 사용한다. DOD(Department of Defense)는 GPS satellite constellation의 운영을 담당한다. 또한 이들은 GPS satellites가 제대로 작동하는지를 모니터링 한다. 각 인공위성의 궤도 매개변수(ephemeris data)는 각 인공위성으로 전송된다. 이는 GPS 신호에 포함된 데이터 메시지의 일부로 방송하기 위함이다. GPS의 좌표 시스템은 World Geodetic System 1987(WGS-84)에서 지정된 Cartesian earth-centered, earth-fixed coordinates이다.
2. System Availability and Reliability.
(a) GPS 위성의 상태는 GPS 위성이 전송하는 데이터 메시지의 일부로 방송된다. 또한 위성의 상태는 NOTAM(Notice to Air Missions) system을 통해 확인할 수 있다.
(b) GNSS의 운영 상태는 사용 중인 장비의 유형에 따라 달라진다. GPS-only equipment의 경우(TSO-C129나 TSO-C196()) prediction program을 통해 비정밀 접근 능력에 대한 운영 상태를 제공받는다. prediction program은 비행 계획 목적을 위한 것으로 이는 수신기에 내장되거나, 혹은 별도로 제공된다.
3. Receiver Autonomous Integrity Monitoring(RAIM). RAIM은 GPS 수신기가 자체적으로 무결성 모니터링을 수행하는 기능이다. 이는 이용 가능한 위성 신호가 특정 비행 단계에 대한 무결성 조건을 충족하는지 확인함으로써 이루어진다. RAIM이 없다면 조종사는 GPS의 위치 무결성을 확신할 수 없다. RAIM은 조종사에게 즉각적으로 피드백을 제공한다. 이러한 fault detection은 PBN(performance-based navigation)에서 매우 중요하다(Paragraph 1-2-1, Performance-Based Navigation(PBN) and Area Navigation(RNAV) 참조). 왜냐하면 satellite control segment가 잘못된 위성 정보를 확인 및 수정하기까지 최대 2시간이 걸릴 수 있기 때문이다.
(a) 위성이 오류 정보를 제공하는지를 판단하기 위해서는(즉, 수신기가 RAIM 기능을 수행하기 위해서는) 항법에 필요한 위성 말고도 최소 하나의 위성이 더 필요하다. 무결성의 이상을 감지하기 위해 RAIM은 최소 5개의 위성을, 혹은 4개의 위성과 barometric altimeter input(baro-aiding)을 필요로 한다. baro-aiding이란 다섯 번째 위성 대신 non-satellite input source를 사용하여 GPS integrity solution을 강화하는 방법이다. 일부 GPS 수신기는 FDE(fault detection and exclusion)라 불리는 RAIM 기능을 가지고 있다. 이는 부적절한 위성을 position solution으로부터 제외한다. FDE가 가능한 GPS 수신기는 6개의 위성을, 혹은 5개의 위성과 baro-aiding을 필요로 한다. 이를 통해 GPS 수신기는 오류 신호를 position solution에서 제거함으로써 무결성이 보장된 위치를 제공한다. baro-aiding을 이용하기 위해선 메뉴얼에 설명된 방법대로 수신기에 current altimeter setting을 입력해야 한다. GPS 고도는 수직 오차가 크므로 사용하지 않는다.
(b) 일반적으로 두 가지 유형의 RAIM 오류 메시지가 있다. 첫 번째 유형의 메시지는 RAIM 무결성 모니터링을 제공할 위성이 충분하지 않음을 나타낸다. GPS navigation solution은 충분할 수 있으나 integrity solution은 결정될 수 없다. 두 번째 유형의 메시지는 RAIM integrity monitor가 잠재적 오류를 발견하였음을, 그리고 특정 비행 단계에 대한 navigation solution에 일관성이 없음을 나타낸다. RAIM 기능이 없다면 조종사는 정확한 GPS 위치를 보장받지 못한다.
4. Selective Availability. SA는 GPS의 정확도를 의도적으로 저하시키는 방법이다. 이는 정확한 GPS 위치 정보의 적대적 사용을 막기 위해 설계되었다. SA는 2000년 5월 1일에 중단되었다. 허나 많은 GPS 수신기는 SA가 여전히 활성화된 상태라 가정하고 설계되었다. 새로운 수신기는 ICAO Annex 10의 성능 값을 활용할 수 있다.
b. Operational Use of GPS. 미국의 민간 운영자는 oceanic airspace, certain remote area, the NAS and other States 내에서 GPS 장비를 사용할 수 있다. 원하는 운영을 위해선 GPS 이외의 장비가 필요할 수 있다. GPS 항법은 VFR(Visual Flight Rules) 운영과 IFR(Instrument Flight Rules) 운영 모두에서 사용된다.
1. VFR Operations
(a) GPS 항법은 향상된 항행 능력, 그리고 향상된 상황 인식을 제공함으로써 VFR 조종사의 자산이 되었다. GPS가 VFR 조종사에게 많은 이점을 제공하긴 하나 시스템의 능력이 초과되지 않도록 주의해야 한다. VFR 조종사는 GPS 항법을 무선 항법 보조시설, 지문 항법, 그리고 추측 항법에 통합해야 한다.
(b) VFR 항법에 사용되는 GPS 수신기는 휴대용 장치부터 fully integrated IFR/VFR installation까지 다양하다. 조종사는 이를 비행도중 사용하기 전에 수신기의 제한 사항을 반드시 이해해야 한다. 이는 항법 정보를 잘못 사용하지 않기 위함이다. (표 1-1-6 참조.) 대부분의 수신기는 직관적이지 않다. 조종사는 수신기 작동에 사용되는 다양한 keystrokes, knob functions, 그리고 displays를 배워야 한다. 일부 제조업체는 그들의 수신기에 대한 컴퓨터 기반 튜토리얼이나 시뮬레이션을 제공한다. 조종사는 이를 사용하여 장비의 작동에 익숙해질 수 있다.
(c) VFR 운영 도중 GPS를 사용할 경우 RAIM capability, database currency, 그리고 antenna location이 중요하다.
(1) RAIM Capability. VFR GPS panel에 장착된 수신기, 그리고 휴대용 수신기는 RAIM 경고 기능이 없다. 이는 필요한 수의 위성이 손실된 것을, 혹은 위치 오류가 감지된 것을 조종사에게 알리지 못한다. 조종사는 다른 항법 장치와의 조직적 cross-check을 통해 위치를 확인해야 한다. 두 위치 사이에 불일치가 존재할 경우 GPS 위치를 의심해야 한다.
(2) Database Currency. 데이터베이스의 최신화를 확인한다. IFR 운영을 위해선 데이터베이스가 반드시 업데이트 되어야 한다. 그러나 VFR 항법을 위해 데이터베이스를 업데이트할 조건은 없다. 중요한 공역 내에서는 오래된 데이터베이스의 moving map을 사용하지 않는 것이 좋다. 오래된 데이터베이스를 사용하는 조종사는 최신의 항공 물품(예를 들어 Chart Supplement U.S., Sectional Chart, 혹은 En Route Chart)을 사용하여 waypoints를 확인해야 한다.
(3) Antenna Location. GPS 수신기의 안테나 위치는 IFR 운영인지 VFR 운영인지에 따라 다를 수 있다. VFR 안테나는 일반적으로 성능보다는 편리한 곳에 배치된다. 반면 IFR 안테나는 위성이 선명하게 보이는 곳에 배치된다. 위성이 선명하게 보이지 않는 안테나는 위성의 항법 신호를 상실할 가능성이 높다. 이는 특히 휴대용 GPS 수신기의 경우 그러하다. 일반적으로 GPS 안테나를 조종석 창문 안쪽에 배치하기 위해 suction cup이 사용된다. 이 방법은 매우 유용하긴 하나 안테나 위치가 조종석, 혹은 객실로 제한된다. 이는 이용 가능한 모든 위성들을 선명하게 보는 경우가 거의 없게 만든다. 따라서 항공기 구조의 위성 신호 차단으로 인해 신호 손실이 발생할 수 있다. 이는 항법 기능 손실로 이어진다. 이러한 손실이 RAIM 기능 결핍과 결부될 경우 잘못된 위치 및 항법 정보를 경고 없이 제공할 수 있다. VFR 운영을 위해 휴대용 GPS를 사용하는 것은 규정에 의해 제한되지 않는다. 그러나 항공기의 개조(예를 들어 panel-mounted holder, 혹은 yoke-mounted holder)는 14 CFR Part 43에 의해 규제된다. 규정의 준수, 그리고 안전한 설치를 위해 정비사와 상의한다.
(d) VFR 항법을 위해 GPS만 의존하지 않는다. VFR GPS 수신기에는 정확도, 혹은 무결성에 대한 설계 기준이 사용되지 않는다. VFR 운영 도중 VFR GPS 수신기는 다른 유형의 항법과 함께 사용되어야 한다. 이는 정확한 비행경로를 유지하기 위함이다. GPS 수신기의 작동 방식을 숙지하여 항공기의 내부를 바라보는 시간을 최소화한다. 그리고 항적, 지형, 그리고 장애물 확인을 위해 바깥으로 시선을 유지한다.
(e) VFR Waypoints
(1) VFR waypoints는 area navigation receivers를 장착한 항공기로 시계비행을 하는 동안 위치의 인지를 돕는 보조 장치이다. VFR waypoints는 최신의 항법 절차를 보완하는 도구로 사용되어야 한다. VFR waypoints의 용도는 다음과 같다: 해당 지역에 익숙하지 않은 조종사를 위한 항법 보조 장치, 기존 reporting points의 waypoint 규정, B 등급 및 C 등급 공역 내에서의 항법 향상, Special Use Airspace 주변에서의 항법 향상, 그리고 commonly flow mountain passes의 진입 지점. VFR 조종사는 시계비행을 위해 특별히 발부된 최신의 항공 차트를 사용해야 한다. terminal area를 운영하는 경우 조종사는 해당 지역에 대해 사용할 수 있는 Terminal Area Chart를 활용해야 한다. VFR waypoints를 사용한다 하여 14 CFR Part 91의 운영 조건들을 준수해야 할 책임이 완화되지는 않는다.
(2) VFR waypoint 명칭은 “VP”로 시작되는 5개의 문자로 구성된다. 이들을 항법 데이터베이스로부터 검색할 수 있다. VFR waypoints 명칭은 발음할 수 있도록 고안된 것이 아니다. 또한 ATC 교신에 사용하기 위한 것이 아니다. VFR charts에서 stand-alone waypoints는 네 개의 점을 가진 별을 통해 그려진다. 차트의 visual check-points와 결합된 VFR waypoints는 작은 자홍색 깃발 기호로 식별된다. visual check-points와 결합된 VFR waypoints는 visual check-points의 명칭을 통해 발음될 수 있으며 이는 ATC 교신에 사용될 수 있다. 각 VFR waypoint 명칭은 괄호 안에 표시된다.
(3) VFR waypoints는 IFR flight plans에서 사용될 수 없다. VFR waypoints는 IFR 시스템에 의해 인식되지 않으며 이는 IFR routing 목적 상 거절될 것이다.
(4) 조종사는 VFR flight plan의 route of flight section에 5글자의 식별부호를 waypoint로 사용할 수 있다. 조종사는 VFR 조건 하를 운영하는 경우에만 VFR waypoints를 사용할 수 있다. 이는 의도하는 경로 변경, 혹은 계획된 비행경로를 나타낼 수 있다. 이러한 VFR flight plan은 route of flight에서 VOR이 사용되는 것과 유사하다.
(5) 비행 도중 사용하려는 VFR waypoints는 지상에 있을 때 수신기에 로딩 되어야 한다. 이륙 후 조종사는 경로, 혹은 VFR waypoints를 수신기에 프로그래밍 하는 것을 피해야 한다.
(6) VFR waypoints 근처에 있을 때 조종사는 다른 항적의 see and avoid를 경계해야 한다. GPS 항법의 사용량과 그 정확도가 증가하였으므로 VFR waypoints 근처의 항적 증가를 예상하라. 주변을 운항하는 다른 항적 정보를 위하여 ATC 주파수를 모니터링 한다. 자세한 내용은 paragraph 7-6-3, VFR in Congested Areas를 참조한다.
(7) 조종사의 비행 계획 및 시계 비행을 돕기 위해 mountain pass의 진입 지점이 표시된다. VFR waypoints에서 VFR waypoint를 향해 일직선으로 mountain pass를 비행하려 하지 않는다. 대체 경로가 항상 이용 가능하다. 의도하는 비행, 그리고 알고 있는 조건에 적합한 경로를 선택하는 것은 PIC의 책임이다.
REFERENCE -
AIM, Para 7-6-7, Mountain Flying.
2. IFR Use of GPS
(a) General Requirements. IFR 하에 GPS 운영을 수행할 수 있는 권한은 다음과 같다:
(1) IFR 운영에 사용되는 GPS 항법 장비는 Technical Standard Order(TSO) TSO-C129(), TSO-C196(), TSO-C145(), 혹은 TSO-C146()에 명시된 조건에 따라 승인되어야 한다. 이러한 장비의 설치는 AC 20-138, Airworthiness Approval of Positioning and Navigation Systems에 따라 수행되어야 한다. TSO-C115a에 따라 승인된 장비는 TSO-C129의 조건을 충족하지 못한다. VFR GPS 시스템과 휴대용 GPS 시스템은 IFR 항법, 계기 접근, 혹은 주된 계기 비행 기준에 대해 승인되지 않는다.
(2) IFR 하에 항행하는 un-augmented GPS(TSO-C129() 혹은 TSO-C196()) 항공기는 비행계획서의 route of flight를 항행하는데 적합한 대체 수단을 장비해야 한다(대체 항법 장비의 예로는 VOR, 혹은 DME/DME/IRU 기능이 있음). 무결성 모니터링을 위해 RAIM을 사용할 수 있는 경우에는 대체 항법 장비의 적극적 모니터링이 필요하지 않다. GPS RAIM 기능이 상실된 경우에는 대체 항법 수단의 적극적 모니터링이 필요하다.
(ATP: DME/DME/IRU를 사용하는 RNAV 시스템을 갖춘 항공기 조종사는 departure procedures에서의 대체 수단을 사용하기 위해 항법 시스템 위치가 takeoff roll 시작 지점으로부터 1,000ft 이내인지 확인해야 한다.)
(3) RAIM 기능의 상실될 것으로 예상되는 경우를 위한 절차를 설정해야 한다. RAIM을 사용할 수 없을 것으로 예상되는 경우 다른 항법 장치를 사용하거나, RAIM이 가능한 곳으로 경로를 변경하거나, 출항을 지연하거나, 혹은 비행을 취소해야 한다.
(4) GPS 운영은 AFM, 혹은 flight manual supplement에 따라 수행되어야 한다. 비행 승무원은 항공기에 설치된 특정 GPS 장비, 수신기 운영 매뉴얼, 그리고 AFM이나 flight manual supplement를 숙지해야 한다. GPS 장비의 작동, 수신기 표시, 그리고 기능은 다양하다. 이러한 차이 때문에 다른 브랜드의(혹은 심지어 같은 브랜드의 다른 모델) GPS 수신기에 대한 철저한 지식이 없다면 이러한 장비를 IFR 하에 사용해서는 안 된다. 대부분의 수신기에는 시뮬레이터 모드가 내장되어 있다. 이를 통해 조종사는 장치의 작동에 익숙해질 수 있다.
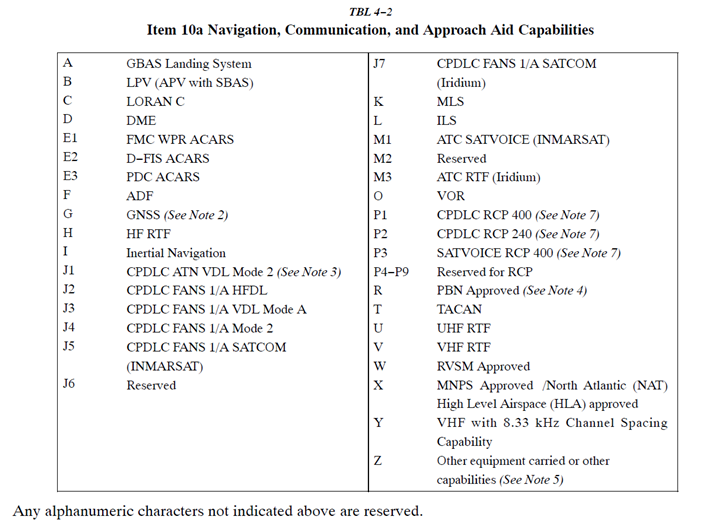
(5) IFR-approved GPS에 따라 항행하는 항공기는 PBN(performance-based navigation) 항공기로 간주되며 특별한 장비 접미사를 가진다. Appendix 4, TBL 4-2에 따른 적절한 장비 접미사를 ATC flight plan에 제출한다. GPS 항전 장비가 작동하지 않을 경우 조종사는 ATC에 보고한 다음 장비 접미사를 수정해야 한다.
(6) GPS IFR 운영을 수행하기 전에 조종사는 NOTAM과 항공 정보를 검토해야 한다. (GPS NOTAMs/Aeronautical Information 참조).
(b) Database Requirements. 항법 데이터는 최신 상태여야 하며 의도하는 운영 지역에 적합해야 한다. 또한 여기에는 항법 보조 장치, waypoints, 그리고 출항∙입항∙ 교체비행장을 위한 coded terminal airspace procedures가 포함되어야 한다.
(1) terminal 및 en route 조건을 위한 추가적인 데이터베이스 지침은 AC 90-199, U.S. Terminal and En Route Area Navigation(RNAV) Operations에서 확인할 수 있다.
(2) RNP(Required Navigation Performance) instrument approach, RNP terminal, 그리고 RNP en route 조건을 위한 추가적인 데이터베이스 지침은 AC 90-105, Approval Guidance for RNP Operations and Brometric Vertical Navigation in the U.S. National Airspace System에서 확인할 수 있다.
(3) 비행할 모든 절차들은 최신의 공중 항법 데이터베이스로부터 검색될 수 있어야 한다. 이는 장비 제조업체, 혹은 FAA-approved source에서 제공된다. 시스템은 접근 명칭을 통해 항공기 항법 데이터베이스로부터 절차를 검색할 수 있어야 한다. 위도/경도, 혹은 place/bearing을 사용하여 직접 입력된 waypoints는 접근 절차에 허용되지 않는다.
(4) 공중 항법 데이터베이스에서 검색한 절차나 waypoint를 사용하기 전에 조종사는 데이터베이스의 유효성을 확인해야 한다. 이 확인에는 다음과 같은 preflight step과 inflight step을 포함해야 한다:
[a] Preflight:
[1] 데이터베이스의 발부 날짜를 확인한다. 그리고 의도하는 사용 날짜/시간이 만료 날짜/시간 이전인지를 확인한다.
[2] 데이터베이스의 제공자가 특정 waypoint나 procedure의 사용을 제한하는 공지를 게재하였는지 확인한다.
[b] Inflight:
[1] waypoint의 명칭과 transition의 명칭이 procedure chart의 명칭과 일치하는지 확인한다. procedure chart에 표시된 철자와 일치하지 않는 waypoint는 사용하지 않는다.
[2] waypoints 위치와 순서가 타당한지 확인한다. 그리고 각 waypoints에 대한 방향정위가 수평 및 수직 방향에 대해 접근 차트와 일치하는지 확인한다.
NOTE -
각 waypoint의 위도 및 경도, waypoint의 유형 및/혹은 고도 제한을 확인하기 위한 특별한 조건은 없다. 절차 내 waypoint들의 전반적 관계, 혹은 각 waypoint 위치의 타당성만이 필요하다.
[3] [b]에서 언급된 방법으로 대략적인 검토를 수행한 결과 오류의 가능성이 있는 경우 위도 및 경도, waypoint 유형, 그리고 고도 제한이 published data와 완전히 일치함을 확인하기 전까지는 검색된 절차나 waypoint를 사용하지 않는다.
(5) air carrier operator와 commercial operator는 그들의 운영 기준(operations specifications) 규정을 충족해야 한다.
[a] 상업, 혹은 임대를 위한 국내 운영 도중 운영자는 reversion operation이나 contingency operation이 가능한 두 번째 항법 시스템을 보유해야 한다.
[b] 운영자는 두 개의 독립된 항법 시스템을 가지고 있어야 한다(혹은 하나의 적절한 시스템, 그리고 독립적인 백업 기능을 가지고 있어야 함). 그리고 항공기에는 충분한 연료가 있어야 한다(14 CFR 121.349, 125.203, 129.17, 그리고 135.165 참조). 이러한 규칙은 단일 장애점(single point of failure)을 방지함으로써 운영의 안전을 보장한다.
NOTE -
multi-sensor navigation에 대해 승인된, 그리고 하나의 항법 시스템을 장비한 항공기는 항법 시스템 구성 요소들(FMS 포함) 중 하나가 고장 났을 때 안전하게 항행할 수 있는 능력을 유지해야 한다. FMS와 독립된 VOR 기능을 보유할 경우 이 조건을 충족할 수 있다.
[c] 두 번째 시스템을 위한 조건은 항법 기능을 달성하는데 필요한 전체 장비들에 적용된다. 예를 들어 두 개의 RNAV 시스템(예를 들어 GPS와 DME/DME/IRU)을 사용하여 조건을 준수하기 위해선 항공기가 두 개의 독립된 무선 항법 수신기와 두 개의 독립된 항법 컴퓨터(예를 들어 FMS)를 장비해야 한다. 또는 VOR 기능을 갖춘 하나의 RNAV 시스템을 사용하여 조건을 준수하기 위해선 VOR 기능이 FMS와 독립되어야 한다.
[d] 만약 주요 항법 시스템이 GPS 기반이라면 두 번째 시스템은 GPS와 독립되어야 한다(예를 들어 VOR, 혹은 DME/DME/IRU). 이래야만 두 개의 독립된 항법 시스템 조건이 충족된다. 이는 GPS나 WAAS 서비스가 손실되어도 항법을 계속할 수 있게 해준다. GPS 간섭, 그리고 GPS 테스트로 인해 GPS 서비스가 중단되는 상황이 흔해졌다. 때문에 FAA는 14 CFR 121.349, 125.203, 129.17, 그리고 135.65에 따라 IFR 운영을 수행하는 운영자들로 하여금 non-GPS 항법 기능을 보유할 것을 요구한다. 이는 en route/terminal 운영을 위한 DME/DME∙IRU∙VOR 중 하나, 그리고 final approach를 위한 VOR∙ILS 중 하나로 구성된다. 이러한 시스템은 reversionary 기능으로 사용되므로 하나의 장비만으로도 충분하다.
3. Oceanic, Domestic, En Route, and Terminal Area Operations
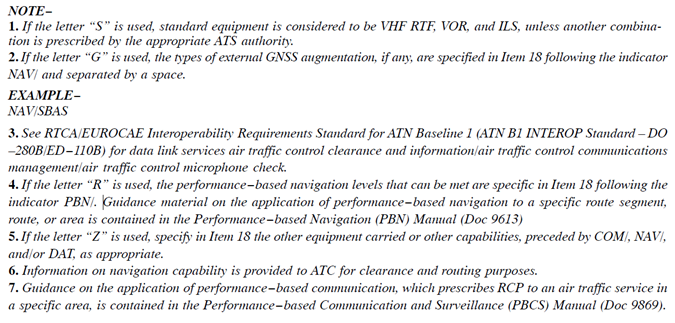
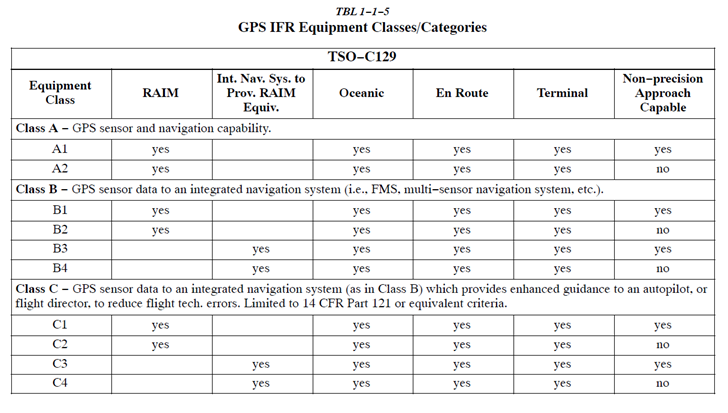
(a) 승인된 항전 시스템이 설치된 경우에만 oceanic area에서 GPS IFR 운영을 수행한다. TSO-C196()의 사용자, 그리고 Class A1∙A2∙B1∙B2∙C1∙C2 운영에 대해 승인된 TSO-C129()의 사용자는 장거리 항법에 대해 승인된 수단들(예를 들어 dual INS) 대신 GPS를 사용할 수 있다(표 1-1-5와 1-1-6 참조). 하나의 GPS를 장비한 항공기는 장거리 항법을 위해 하나의 수단을 필요로 하는 short oceanic routes를 운영할 수 있다(AC 20-138, Appendix 1 참조).
(b) 승인된 항전 시스템이 설치된 경우에만 GPS domestic, en route, 그리고 terminal IFR 운영을 수행한다. 조종사는 TSO-C196(), 혹은 Class A1∙B1∙B3∙C1∙C3 운영에 대해 승인된 TSO-129()를 통해 GPS를 사용할 수 있다(혹은 조종사는 TSO-C145()나 TSO-C146()을 통해 GPS/WAAS를 사용할 수 있음). TSO-C129()나 TSO-C196() 수신기를 사용하는 경우 목적지 공항 및 교체비행장을 향한 경로의 모든 지상 기반 시설들을 수신하는데 필요한 항전 장비가 설치되어야 한다. 이러한 경로에 필요한 지상 기반 시설들은 반드시 운영 중이어야 한다.
(1) TSO-C145()나 TSO-146() GPS/WAAS(wide area augmentation system)이 설치된 경우 알래스카 내 지상 기반 보조 시설의 서비스 범위 바깥에서도 GPS en route IFR 운영을 수행할 수 있다. WAAS는 SBAS(satellite-based augmentation system)의 미국 버전이다.
[a] 알래스카에서 항공기는 ATC 레이더 감시가 유지되는 동안 GPS(TSO-C129() 혹은 TSO-C196()) 장비를 통해 GNSS Q-routes를 운영할 수 있다. GPS/WAAS(TSO-C145() 혹은 TSO-C146())을 사용하는 경우 ATC 레이더 감시가 필요하지 않는다.
[b] 알래스카에서 항공기는 GPS/WAAS(TSO-C145() 혹은 TSO-C146()) 장비를 통해 GNSS T-routes를 운영할 수 있다.
(2) GPS/WAAS 항법 시스템을 사용하는 경우 en route IFR 운영을 위한 지상 기반 항법 장비가 필요하지 않다. 모든 운영자는 GPS/WAAS 항법 시스템이 작동하지 않는 경우에 대비하여 대체 항법 수단을 사용할 수 있는지 확인해야 한다.
(3) Q-routes and T-routes outside Alaska. Q-routes는 AC 90-100, U.S. Terminal and En Route Area Navigation(RNAV) Operations에서 설명하는 기준을 만족하는 GPS, GPS/WAAS, 혹은 DME/DME/IRU RNAV 시스템이 현재 충족하는 시스템 성능을 필요로 한다. T-routes는 GPS, 혹은 GPS/WAAS 장비를 필요로 한다.
REFERENCE -
AIM, Para 5-3-4, Airways and Route Systems.
(c) 승인된 항전 시스템이 설치되었으며 다음 조건들이 충족된다면 GPS IFR approach/departure 운영이 수행될 수 있다:
(1) 항공기가 TSO-C145(), TSO-C146(), TSO-C196(), 혹은 Class A1∙B1∙B3∙C1∙C3에 대해 승인된 TSO-C129()를 장비한다.
(2) approach/departure가 항법 컴퓨터의 최신 공중 항법 데이터베이스로부터 검색될 수 있어야 한다. 시스템은 명칭을 통해 항공기 항법 데이터베이스로부터 절차를 검색할 수 있어야 한다. 위도/경도 혹은 place/bearing을 사용하여 직접 입력된 waypoints는 접근 절차에 대해 허용되지 않는다.
(3) GPS로 instrument approaches/departures를 수행할 수 있는 권한은 미국 공역으로 제한된다.
(4) 다른 공역에서 GPS를 사용하기 위해선 FAA Administrator의 승인을 받아야 한다.
(5) 미국 바깥에서 GPS instrument approach/departure를 수행하기 위해선 해당 국가 기관의 승인을 받아야 한다.
4. Departures and Instrument Departure Procedures(DPs)
IFR charted departures와 DP를 비행하기 위해선 GPS 수신기가 terminal(±1 NM) CDI sensitivity로 설정되어야 한다. 또한 GPS 수신기는 데이터베이스에 포함된 항법 경로로 설정되어야 한다. Terminal RAIM은 수신기에 의해 자동으로 제공되어야 한다. (waypoints가 active flight plan의 일부가 아닌 첫 번째 목적지로 직접 향하는 경우라면 departure를 위한 Terminal RAIM을 사용하지 못할 수도 있다.) DP의 특정 구간은 조종사의 직접적 개입이 필요할 수 있다(특히 course를 향한 radar vector를 받거나, 혹은 waypoint를 향한 특정 course를 교차해야 하는 경우). 데이터베이스에는 모든 활주로의 모든 transitions, 혹은 departures를 포함하지 않을 수 있다(일부 GPS 수신기는 데이터베이스에 DP를 포함하지 않음).
5. GPS Instrument Approach Procedures
(a) GPS overlay approaches는 GPS 항전 장치를 사용하여 비행할 수 있도록 승인된 비정밀 계기접근 절차이다. 여기에 Localizer(LOC), localizer type directional aid(LDA), 그리고 SDF(simplified directional facility) procedures는 승인되지 않는다. overlay procedures는 접근 명칭의 “name of the procedure” 및 “or GPS”(예를 들어 VOR/DME or GPS RWY 15)로 식별된다. 승인된 절차는 최신의 항법 데이터베이스로부터 검색될 수 있어야 한다. 또한 항법 데이터베이스는 기존의 NAVAID approaches에 대한 정보를 포함하는 지도를 표시함으로써 position orientation을 개선할 수 있다. 이러한 접근 정보를 GPS overlay approach와 혼동해서는 안 된다(항법 데이터베이스에서 이러한 접근들을 식별하는 방법에 대한 자세한 내용은 수신기의 작동 매뉴얼, AFM, 혹은 AFM supplement를 참조한다).
NOTE -
overlay approaches는 stand-alone GPS approaches를 위한 설계 기준(paragraph 5-4-5m, Area Navigation(RNAV) Instrument Approach Charts에서 설명됨)을 준수하지 않는다. overlay approach 기준은 ground-based NAVAID approaches에 사용되는 설계 기준에 기초한다.
(b) GPS 시스템을 위해 특별히 설계된 stand-alone approach procedures는 기존의 overlay approaches를 많이 대체하였다. 접근 명칭에 “GPS”를 포함하는 모든 접근들은(예를 들어 “VOR or GPS RWY 24.” “GPS RWY 24”. 혹은 “RNAV(GPS) RWY 24”) GPS를 사용하여 비행될 수 있다. GPS를 장비한 항공기는 접근을 수행하기 위해 ground-based NAVAIDS, 혹은 이와 연관된 항공기 항전 장비를 필요로 하지 않는다. 허나 가능하다면 ground-based NAVAID를 통해 접근을 모니터링 하는 것이 권장된다. 기존의 overlay approaches는 GPS 명칭을 통해 요청될 수 있다. 예를 들어 VOR or GPS RWY 24는 “GPS RWY 24”로 요청될 수 있다. 일부 GPS 절차는 TAA(Terminal Arrival Area)를 가진다.
(c) FDE(fault detection and exclusion) 기능을 갖춘 GPS 사용자가 RNAV(GPS) approach가 수행될 공항에서의 approach integrity를 위하여 비행 전에 RAIM prediction을 수행하였으며 GPS-based IAP를 수행하는데 필요한 적절한 지식과 훈련 및/혹은 승인을 받았다면 목적지 공항이나 교체비행장에 대해 GPS-based IAP를 기반으로 비행 계획서를 제출할 수 있다(허나 목적지 공항과 교체비행장모두에 대해 GPS-based IAP를 기반으로 할 수는 없음). 교체비행장에 대해 조종사는 다음을 계획할 수 있다:
(1) LNAV(lateral navigation) MDA, 혹은 circling MDA
(2) baro-VNAV(barometric vertical navigation) 장비를 사용하는 경우 LNAV/vertical navigation(LNAV/VNAV) DA
(3) 특정 권한을 가진 사용자가 baro-VNAV 장비를 사용하는 경우, 그리고 조종사가 prediction program을 통해 RNP(required navigation performance) 유효성을 확인한 경우 RNAV(RNP) IAP의 RNP 0.3 DA
(d) 위의 조건을 충족할 수 없는 경우 교체비행장은 GPS-based approach 이외의 계기 절차가 있어야 한다. 이 절차는 estimated time of arrival에 이용 가능해야하며 항공기는 이를 비행할 수 있도록 준비되어야 한다.
(e) Procedures for Accomplishing GPS Approaches
(1) RNAV(GPS) procedure는 TAA(Terminal Arrival Area)와 연관될 수 있다. RNAV procedure의 기본 설계는 “T” design, 혹은 수정된 “T” design이다(Paragraph 5-4-5d, Terminal Arrival Area(TAA) 참조).
(2) RNAV(GPS) approach를 승인받은 조종사는 IAWP(Initial Approach Waypoint), 혹은 feeder fix로부터 full approach를 비행해야 한다. intermediate fix에서 임의로 접근에 진입하는 것은 지형 회피를 보장하지 않는다.
(3) 접근이 항법 시스템에 로드되면 GPS 수신기가 공항 기준점으로부터 30NM 직선거리에서 “arm” annunciation을 제공한다. 조종사가 아직 approach mode를 arm 하지 않았다면 이때 approach mode를 arm 해야 한다(일부 수신기는 arm을 자동으로 수행함). arm이 되어있지 않다면 수신기는 ±5NM의 CDI 및 RAIM sensitivity에서 ±1NM terminal sensitivity로 변경되지 않는다. (IAWP가 30마일 지점 내에 있는 경우) approach mode가 arm 되었고 항공기가 30NM 내에 있다면 CDI sensitivity가 변경된다. (IAWP가 공항 기준점으로부터 30NM 너머에 있는 경우) approach mode가 arm 되었다 해도 항공기가 공항 기준점으로 30마일 이내에 들어가기 전까지는 CDI sensitivity가 변경되지 않는다. feeder route 장애물 회피는 수신기가 공항 기준점으로부터 30NM 이내일 때 terminal(±1 NM) CDI sensitivity 및 RAIM 상태임을 전제로 한다. 따라서 수신기는 30NM annunciation 이전에 arm 되어야 한다.
(4) 조종사는 특정 수신기가 turn anticipation을 계산하는데 사용하는 bank angle/turn rate를 알고 있어야 한다. 그리고 바람, 그리고 대기 속도가 수신기의 계산에 포함되는지도 알아야 한다. 이러한 정보는 수신기의 작동 매뉴얼에 있어야 한다. final approach course로 선회할 시 over banking이나 under banking을 수행하면 on course에 놓이는 것이 크게 지연된다. 이는 다음 segment altitude로 도달하는데 높은 하강률을 초래할 수 있다.
(5) approach mode가 arm 된 상태에서 FAWP(Final Approach Waypoint)로부터 2NM 이내로 들어가면 approach mode가 활성화된다. 이는 RAIM과 CDI를 approach sensitivity로 변화시킨다. FAWP로부터 2NM 지점부터 full scale CDI sensitivity가 ±1NM에서 점점 줄어든다. 그리고 FAWP에서 ±0.3NM로 변화한다. sensitivity가 ±1NM에서 ±0.3NM로 변화할 때 CDI가 중앙에 있지 않다면 이에 따라 CDI 편차가 증가한다. 이는 설령 적절한 intercept heading에 있더라도 항공기가 course로부터 더 멀리 이동하는 느낌을 줄 수 있다. approach mode에서 cross track error를 사용할 수 있다면 이를 참조하는 것이 방향정위를 유지하는데 도움이 될 수 있다. 2NM 지점에서 sensitivity 변화가 시작되기 전에 final approach course를 미리 establish 해두면 ramp down 도중 CDI 화면을 해석하는데 문제가 발생하지 않을 것이다. 따라서 FAWP로부터 2NM 이내의 final approach course를 교차하도록 만드는 vectors를 요청하거나 수락하지 않는 것이 권장된다.
(6) vectors to final을 수신하였을 경우 FAWP에서 non-sequencing mode를 설정한 다음 직접 course를 설정하도록 대부분의 수신기 작동 매뉴얼이 권장한다. 이는 활주로와 정렬된 기존 구간 바깥의 final approach course로 vector 된 경우 extended final approach course를 제공한다. 접근에 대해 게재된 구간에 establish 되기 전까지는 할당받은 고도를 유지해야 한다. FAWP나 stepdown fixes 바깥에 있는 waypoints에서 필요한 고도를 고려해야 한다. 적절한 위치에서 하강하기 위해선 FAWP까지의 거리를 계산해야 할 수도 있다.
(7) 접근 도중 automatically selected sensitivity를 중단할 경우 approach mode annunciation이 취소된다. FAWP로부터 2NM 이전에 approach mode가 arm 되지 않으면approach mode가 활성화되지 않는다. 그리고 장비에 flag가 발생할 것이다. 이러한 상황에서는 RAIM 및 CDI sensitivity가 ramp down 하지 않는다. 그리고 조종사는 MDA로 하강하는 대신 MAWP로 비행한 다음 실패 접근을 수행해야 한다. FAWP 전에 approach mode가 활성화되었는지 확인하기 위해 approach active annunciator 및/혹은 수신기를 점검해야 한다.
(8) 데이터베이스의 절차가 최신이며 접근 차트가 “GPS”로 식별되지 않는 한 접근을 시도하지 않는다. 항법 데이터베이스는 non-overlay approach procedures에 대한 정보를 포함할 수 있다. 이는 NAVAID를 사용하는 접근을 비행할 때 지도를 제공함으로써 position orientation을 돕는다. 이러한 접근 정보를 GPS overlay approach와 혼동해서는 안 된다(항법 데이터베이스에서 이러한 절차를 식별하는 방법에 대한 내용은 수신기 작동 매뉴얼, AFM, 혹은 AFM Supplement를 참조). point to point를 비행하는 것은 접근 절차의 준수를 보장하지 않는다. 올바른 RAIM sensitivity를 사용할 수 없으며 CDI sensitivity가 ±0.3NM을 향해 자동으로 변경되지 않는다. 일부 수신기의 경우 CDI sensitivity를 직접 설정한다 하여 RAIM sensitivity가 자동으로 변경되지 않는다. 몇몇 비정밀 접근 절차는 GPS와 함께 사용되도록 코딩될 수 없으며 overlay로 사용될 수 없다.
(9) holding patterns를 수행할 경우 GPS 수신기의 정확한 작동에 특히 주의를 기울여야 한다. overlay approaches의 경우에는 procedure turns와 같은 운영에 주의를 기울여야 한다. 이러한 절차를 수행하기 위해선 수신기의 waypoints sequencing을 중단한 다음 기동이 완료되었을 때 automatic GPS navigation sequencing을 재개하기 위하여 조종사가 개입해야할 수 있다. 동일한 waypoint가 비행경로에 두 번 이상 연속적으로 나타날 수 있다(예를 들어 procedure turn의 IAWP, FAWP, MAHWP). 비행 중인 구간에 적합한 waypoint로 수신기가 sequence 되도록 주의를 기울여야 한다(특히 하나 이상의 fly-overs를 건너뛰는 경우. 예를 들어, procedure turn이 비행되지 않을 경우 IAWP가 아닌 FAWP로 건너뛰는 경우). 조종사는 waypoint 순서들 중 올바른 위치에서 GPS automatic sequencing을 시작하기 위해 하나 이상의 동일한 waypoints를 순서대로 통과해야 할 수도 있다.
(10) 잘못된 GPS 수신기 입력은 접근 도중 특히나 위험하다. 경우에 따라 잘못된 입력으로 인해 수신기가 approach mode를 중단할 수 있다.
(11) overlay approach에서 DME fix로 식별된 fix는 GPS 수신기의 waypoints sequence에 포함되지 않는다(단, DME fix에 명칭이 할당된 경우 제외). 명칭이 할당된 경우 waypoint까지의 ATD(along track distance)는 접근 차트에 명시된 DME가 아니라 0일 수 있다. 원래의 접근 방식이 DME를 사용하는 overlay procedure인 경우 이를 주의해야 한다.
※ Pilot/Controller Glossary
ALONG-TRACK DISTANCE(ATD) - 항공기의 현재 위치와 fix 사이의 수평 거리를 지역 항법 시스템(이 시스템은 경사 거리 오차의 영향을 받지 않음)으로 측정한 값.
(12) VDP(visual descent point)가 게재된 경우 이는 waypoint sequence에 포함되지 않는다.조종사는 visual descent를 시작하기 위해 ATD나 DME를 사용해야 한다.
(13) final approach segment의 unnamed stepdown fixes는 항공기 항법 데이터베이스의 waypoint sequence에 코딩 될 수도 있고 코딩되지 않을 수도 있다. 이는 반드시 ATD를 통해 식별되어야한다. RNAV(GPS) approach final approach segment의 stepdown fixes에는 명칭이 지정되며 ATD에 의해 식별된다. 그러나 GPS 항전 장치는 FAF와 MAP 사이의 waypoints를 수용할 수도 있고 수용하지 않을 수도 있다. 조종사는 GPS 장비의 기능을 알아야하며 필요한 경우 ATD를 통해 stepdown fixes를 계속 식별해야 한다.
(f) Missed Approach
(1) GPS missed approach는
조종사는 항공기에 설치된 특정 GPS 수신기의 missed approach 활성화 절차를 완전히 숙지해야 한다. 또한 MAWP 이후 반드시 올바른 조치를 취해야한다. MAWP 이전에 missed approach를 활성화할 경우 CDI sensitivity가 terminal(±1NM) sensitivity로 즉시 변경된다. 그리고 수신기는 MAWP를 향해 계속하여 안내한다. MAWP에 도달하기 전에 선회를 수행해서는 안 된다. missed approach가 활성화되지 않은 경우 GPS 수신기는 연장된 inbound final approach course를 나타낸다. 그리고 MAWP를 통과한 후 직접 수신기를 sequence 하기 전까지는 MAWP로부터 ATD가 증가한다.
(2) missed approach의 첫 번째 경로가 다음 waypoint로 향하는 것이 아닌 course를 경유하는 것이라면 course 설정을 위한 조종사 조치가 필요하다. 필요한 모든 입력 정보를 숙지하는 이 비행 단계에서 특히나 중요하다.
(1) 위성의 수가 부족하거나, 혹은 부적절한 위성 기하 구조로 인해 RAIM 중단이 발생할 수 있다. 위성 수신 상실 및 RAIM 경고는 항공기의 움직임(pitch나 bank angle의 변화)으로 인해 발생할 수도 있다. 항공기 안테나의 위치, 수평선에 대한 위성 위치, 그리고 항공기 자세는 하나 이상의 위성 수신에 영향을 미칠 수 있다. 위성의 상대적 위치는 지속적으로 변화하므로 공항에 대한 이전의 경험이 항상 수신을 보장하지 않는다. 따라서 RAIM availability를 항상 확인해야 한다.
(2) 민간 조종사는 제조업체가 제공하는 RAIM prediction tool, 혹은 SAPT(Service Availability Prediction Tool)을 사용하여 비정밀 접근에 대한 GPS RAIM availability를 얻을 수 있다. 또한 조종사는 비행 전 브리핑 도중 flight service station으로부터 GPS RAIM aeronautical information을 요청할 수 있다. GPS RAIM aeronautical information은 특정 공항에 대해 3시간(예를 들어 12시15분에 도착할 예정인 경우 11시 ~ 14시), 혹은 24시간으로 얻을 수 있다. FAA briefers는 ETA로부터 1시간 전에서 1시간 후의 RAIM 정보를 제공한다(단, 조종사가 특정 시간대를 요청한 경우 제외). 게재된 GPS departure를 비행하는 경우 출항 공항에 대한 RAIM prediction 또한 요청해야 한다.
(3) 군은 군 비행장에서의 비정밀 접근을 위한 공항별 GPS RAIM NOTAM을 제공한다. RAIM 중단은 M-series NOTAM으로 발부된다. 이는 요청 시점으로부터 최대 24시간까지 얻을 수 있다.
(4) 수신기 제조업체 및/혹은 데이터베이스 공급업체는 데이터베이스와 관련된 “NOTAM” 유형의 정보를 제공할 수 있다. 조종사는 데이터베이스와 관련된 최신 정보를 보유하고 있는지 확인하기 위해 이것들을 확인해야 한다.
(5) RAIM을 사용할 수 없는 경우 다른 유형의 항법 및 접근 시스템을 사용하거나, 다른 경로나 목적지를 선택하거나, 혹은 입항 시 RAIM이 사용될 수 있을 것으로 예측되기 전까지 비행을 연기한다. 장거리 비행 도중 조종사는 목적지에 대한 RAIM prediction을 다시 확인하는 것을 고려해야 한다. 이는 이륙 후 발생한 위성 정지를 조기에 확인할 수 있다.
(6) FAWP 이전에 RAIM failure/status annunciation이 발생한 경우 접근을 완료해서는 안 된다. 왜냐하면 GPS는 더 이상 무결성을 제공하지 않기 때문이다. 수신기는 FAWP로부터 2NM 전까지 RAIM prediction을 수행함으로써 RAIM이 approach mode로 진입될 수 있는 상태인지를 확인한다. 조종사는 FAWP 전에(일반적으로 2NM 전에) “Armed”가 “Approach”로 변하는지 확인해야 한다. 만약 변화가 발생하지 않을 경우 위성의 이상이 감지되었음을, 수신기가 arm 되지 못하였음을, 혹은 접근을 불가능하게 만드는 그 외의 문제가 발생하였음을 나타낼 수 있다.
(7) FAWP 이전에 수신기가 approach mode로 변하지 않거나, 혹은 RAIM failure/status annunciation이 발생한 경우 조종사는 접근이나 하강을 수행해서는 안 된다. 대신 FAWP를 거쳐 MAWP(missed approach waypoint)로 진행한 다음 실패 접근을 수행하고 최대한 빨리 ATC에 교신한다. RAIM flag/status annunciation이 나타난 후에도 GPS 수신기는 계속 작동할 수 있다. 허나 항법 정보는 advisory 정도로 간주해야 한다. FAF 이전의 RAIM 중단과 관련된 특정 수신기 표시 및 지침은 작동 설명서를 참조한다.
(8) FAWP 이후에 RAIM flag/status annunciation이 나타난 경우 조종사는 상승을 수행한 다음 실패 접근을 수행해야 한다. RAIM flag/status annunciation이 나타난 후에도 GPS 수신기는 계속 작동할 수 있다. 허나 항법 정보는 advisory 정도로 간주해야 한다. RAIM annunciation과 관련된 정보는 작동 설명서를 참조한다.
(h) Waypoints
(1) GPS 수신기는 항공기 항법 데이터베이스로부터 검색된 한 지점으로부터 다른 지점으로 항행한다. 이러한 지점들은 waypoints(발음 가능한 5글자의 명칭), 현존하는 VHF intersections, DME fixes(발음 가능한 5글자의 명칭), 그리고 3글자의 NAVAID ID이다. 각 waypoint는 위도/경도 좌표로 규정되는 지리적 위치이다. 이러한 5글자의 waypoints, VHF intersections, 5글자의 DME fixes, 그리고 3글자의 NAVAID ID는 다양한 FAA 항공 제품(IFR Enroute Charts, VFR Charts, Terminal Procedures Publications, 등등)에 게재된다.
(2) CNF(Computer Navigation Fix) 또한 위도/경도로 규정된 좌표이다. 이는 PBN(Performance-Based Navigation) 운영을 위해 필요하다. GPS 수신기는 point to point navigation을 위해 waypoints와 CNF를 함께 사용한다. 그러나 CNF는 ATC에 의해 인지되지 않는다. ATC는 CNF를 데이터베이스에 유지하지 않으며 항공 교통 관제 목적으로 이를 사용하지 않는다. CNF는 FAA 항공 제품에 차트화 될 수도 있고 그렇지 않을 수도 있다. 이는 advisory 목적으로만 사용된다. 조종사는 point to point navigation(proceed direct), 비행 계획서 제출, 혹은 항공기/ATC 교신을 위해 CNF를 사용해서는 안 된다. 항공 차트에 표시되는 CNF는 항공기 데이터베이스 비행경로 지점들을 항공 차트 지점들과 동일시함으로써 상황 인식을 증가시킨다. CNF는 5글자로 이루어진 임의의 식별자이다. 이는 waypoints와 마찬가지로 발음될 수 없으며 괄호 안에 배치된다. 모든 CNF는 “CF”로 시작되며 그 다음에는 세 개의 자음이 따라온다(예를 들어, CFWBG). 이러한 5글자의 식별자는 en route charts의 “x” 옆에 있다. 또한 CNF는 접근 차트에 있을 수도 있다. 계기 접근 절차(차트)의 CNF는 GPS overlay approaches의 unnamed DME fixes, DME arcs의 시작지점 및 종료지점, 그리고 VOR∙NDB∙ILS final approach fixes를 나타낼 수 있다. 이러한 CNF는 절차상의 지점들을 GPS에 제공하여 overlay approach가 VOR∙NDB∙ILS approach와 흡사하게 만든다. 이러한 지점들은 GPS 시스템을 통해서만 사용되어야 한다. 조종사는 접근 이외의 목적으로 이 지점들을 사용해서는 안 된다. CNF 개념은 아직 ICAO(International Civil Aviation Organization)에 의해 채택되지 않았다.
(3) GPS approaches는 fly-over waypoint나 fly-by waypoint를 사용하여 접근 경로들을 결합한다. fly-by waypoint는 항공기가 다음 waypoint로 향하는 course에서 roll out 하기 위해 현재 waypoint 이전에 선회할 수 있도록 만듦으로써 두 구간을 연결한다. 이를 turn anticipation이라 한다. 이는 공역 및 지형 회피에 대해 보정된다. MAWP(missed approach waypoint)는 항상 fly-over waypoint이다. holding waypoint는 항법 데이터베이스에 항상 fly-over waypoint로 지정된다. 그러나 이는 차트에 fly-by로 표시될 수도 있다(단, holding waypoint가 절차상 다른 목적으로도 사용되며 두 목적이 모두 fly-over를 필요로 하는 경우 제외). 일부 waypoint는 두 가지 용도로 사용될 수 있다. 예를 들어 waypoint가 NoPT route에 대한 IF로 사용될 경우에는 fly-by로, 그리고 이 waypoint가 IAF/IF hold-in-lieu of PT로 사용될 경우에는 fly-over로 사용된다. waypoint는 한 가지 방법으로만 차트에 표시될 수 있으므로 이러한 상황인 경우 fly-by waypoint 기호가 나타난다.
(4) 각 공항의 unnamed waypoints는 데이터베이스에서 독특하게 식별된다. 식별자가 다른 공항에서도 사용될 수 있지만(예를 들어 RW36은 runway 36가 있는 각 공항의 식별자가 될 것임) 각 공항에 대한 실제 지점은 특정 위도/경도 좌표로 규정된다.
(5) runway threshold waypoint(일반적으로 MAWP)는 5글자의 식별자(예를 들어 SNEEZ)를 갖거나, 혹은 RW##(예를 들어 RW36, RW36L)로 코드화될 수 있다. runway threshold에 위치한 MAWP는 RW## 식별자로 변경된다. 반면 threshold에 위치하지 않는 MAWP는 5글자의 식별자를 가진다. 이로 인해 접근 차트가 항공기 데이터베이스와 다를 수 있다. 또한 runway threshold waypoint는 대부분의 GPS approach에서 MSA(Minimum Safe Altitude)의 중심으로 사용된다.
(i) Position Orientation. 조종사는 GPS를 사용하는 동안 position orientation에 특히 주의를 기울여야 한다. distance 및 track 정보는 다음 active waypoint를 향해 제공된다. 조종사가 active route를 따라 비행하지 않으나(예를 들어 vector를 받을 때) 경로상 다른 waypoint와의 근접으로 인해 수신기가 다음 순서로 넘어갈 수 있다. 이는 수신기를 no-sequencing mode로 설정함으로써 방지할 수 있다. 수신기가 non-sequencing mode일 경우 현재 선택된 waypoint를 향한 bearing 및 distance가 제공된다. 수신기를 다시 auto sequence mode로 전환하거나, 혹은 다른 waypoint를 선택하기 전까지는 경로상 다음 waypoint로 바뀌지 않는다. 조종사는 overlay approaches의 stepdown fixes, 그리고 그 외 지점들을 향한 ATD를 계산해야 할 수도 있다. 왜냐하면 수신기는 VOR(혹은 ILS) 지상국으로 향하는 DME 대신 다음 waypoint로 향하는 ATD를 나타내기 때문이다.
(j) Impact of Magnetic Variation on PBN Systems
ground-based NAVAID IFP(instrument flight procedures), enroute charts, approach charts, 그리고 SID/STAR(Standard Instrument Departure/Standard Terminal Arrival) Charts에 표시된 magnetic courses와 PBN systems 사이에 차이가 있을 수 있다. 이러한 차이는 magnetic course를 계산하는데 사용되는 자기 편차 때문이다. 계기 절차의 모든 구간은 먼저 진북을 기준으로 ground track을 따라 계산된다. 그런 다음 차트에 게재할 magnetic course 계산을 위해 true course에 자기 편차 보정이 적용된다. 절차의 유형에 따라 true course에 어떤 자기 편차를 더하는지가 결정된다. ground-based NAVAID IFP는 차트에 게재할 magnetic course를 얻기 위해 해당 시설의 magnetic variation of record를 적용한다. PBN 절차에서의 magnetic course는 두 가지 방법으로 계산된다. SID/STAR 절차는 airport magnetic variation of record를 사용한다. 반면 IFR enroute charts는 magnetic reference bearing을 사용한다. PBN 시스템은 항공기 위치를 기반으로 하는 알고리즘을 통해 계산된 자기 편차를 더하거나, 혹은 항법 데이터베이스에 코드화된 자기 편차를 더함으로써 진북으로 수정한다. 이는 절차와 PBN 시스템이 서로 다른 자기 편차를 사용하는 결과를 초래할 수 있다. 즉, PBN 시스템이 표시하는 magnetic course와 IFP에 표시된 magnetic course가 다를 수 있다. 그러나 PBN 시스템(VOR/DME RNAV 장비 제외)은 진북을 기준으로 항행한다는 것을, 그리고 조종사 참조를 위해 magnetic course를 표시한다는 것을 이해하는 것이 중요하다. 따라서 정확한 최신 항법 데이터베이스를 갖춘 PBN 시스템은 자기 편차 보정으로 인해 magnetic course를 다르게 표시한다 하여도 계기 절차에 대해 올바른 ground track을 비행해야 한다. PBN 시스템 항전 장치의 항법 데이터베이스 적용이 접근 차트와 상당한 차이를 보이는 경우 접근 차트가 우선된다.
(2) waypoint로 향하는 course는 이전의 waypoint로부터 떠나는 course와 항상 180도 다를 수는 없다. 이는 PBN 시스템 항전 장치의 측지선 계산, 두 waypoint 사이의 거리, 그리고 자기 편차 적용의 차이 때문이다. 거리의 변화 또한 발생할 수 있다. 왜냐하면 PBN 시스템의 distance-to-waypoint 값은 다음 waypoint를 향해 계산된 ATD이며 절차에 게재된 DME 값은 기지국을 향해 측정된 경사거리이기 때문이다. 이러한 차이는 항공기 고도, 그리고 NAVAID 근접성에 따라 증가한다.
(k) GPS Familiarization
조종사는 장비의 모든 점들에 완전히 숙달되기 전까지는 VMC(visual meteorological conditions)에서 GPS approaches를 연습해야 한다. 조종사는 다음 영역들에 능숙해야 한다:
(1) 수신기의 RAIM(receiver autonomous integrity monitoring) prediction 기능을 사용한다.
(2) 비행 계획서에 DP를 삽입한다. 필요한 경우 terminal CDI sensitivity를 설정한다. 그리고 departure를 위한 terminal RAIM이 가능한지 확인한다.
1. FAA는 GPSS 신호의 정확성, 무결성, 그리고 가용성을 향상시키기 위해 WAAS를 개발하였다. WAAS는 이륙부터 접근까지 GPS를 항법 시스템으로 사용할 수 있도록 해준다. WAAS는 민간 항공을 위한 원활한 항법 시스템에 있어 중요한 시스템이며 이는 수용력과 안전성을 향상시킨다.
2. ICAO(International Civil Aviation Organization)는 SBAS(satellite-based augmentation systems)를 위한 SARP(Standards and Recommended Practices)를 규정하였다. 인도와 유럽이 유사한 시스템을 구축하고 있다: GAGAN, 그리고 EGNOS. 이러한 시스템 통합은 광범위한 항법 능력을 생산하며 더 높은 정확성, 가용성, 그리고 무결성을 제공한다.
3. 기존의 ground-based navigation aids와는 달리 WAAS는 보다 광범위한 서비스 영역을 제공한다. 정밀하게 측정된 WRS(wide-area reference stations)는 U.S. WAAS network를 형성하기 위해 연결된다. 위성 시계와 ephemeris corrections를 결정하기 위해, 그리고 전리층의 propagation effects를 모델링하기 위해 GPS 위성의 신호들이 WRS에 의해 모니터링 된다. 네트워크 내의 각 기지국은 WMS(wide-area master station)으로 정보를 전달한다. 여기에서 보정 정보가 계산된다. 보정 메시지가 준비되면 이는 GES(ground earth station)에 위치한 GUS(GEO uplink subsystem)를 통해 GEO(geostationary earth orbit satellite)로 업링크 된다. 그런 다음 이 메시지는 GPS와 동일한 주파수(L1, 1574.42 MHz)를 통해 WAAS GEO의 방송 범위 내 WAAS 수신기로 전달된다.
4. WAAS GEO는 보정 신호를 제공하는 것뿐만 아니라 의사거리도 제공한다. 이는 사실상 추가적인 GPS 위성을 제공함으로써 GPS 가용성을 향상시킨다. 실시간 모니터링을 통해 GPS의 무결성이 향상된다. 그리고 오차 감소를 위한 differential corrections를 제공하여 정확도가 향상된다. 성능 향상 덕분에 GPS/WAAS glide paths(vertical guidance)를 갖춘 접근 절차를 이용하기에 충분해졌다.
5. FAA는 3개의 GEO satellite links, 38 WRSs, 3 WMSs, 6 GES, 그리고 WAAS network를 지원하는데 필요한 지상 통신의 설치를 완료하였다. WAAS를 시운전하기 전에 FAA는 일련의 테스트 및 검사 활동을 수행하였다. 향후 dual frequency operations가 계획되어 있다.
6. GNSS 항법(GPS와 WAAS 포함)은 WGS-84 coordinate system을 기준으로 한다. 이는 Aeronautical Information Publications(전자 데이터와 항공 차트 포함)가 WGS-84(혹은 이에 상당하는 것)를 따르는 경우에만 사용되어야 한다. 다른 국가에서는 SBAS 시스템의 사용에 추가적인 제한을 가할 수 있다.
b. Instrument Approach Capabilities
1. vertical guidance를 제공하나 정밀 접근에 대한 ICAO Annex 10 조건을 만족하지는 못하는 접근 절차가 개발되었다. 이는 전 세계의 항공 운영에 대한 위성 항법의 사용을 지원하기 위함이다. 이러한 절차들은 정밀하지 않으며 APV(Approach with Vertical Guidance)라 불린다. 이는 ICAO Annex 6에 규정되어 있다. 여기에는 LNAV/VNAV, 그리고 LPV(localizer performance with vertical guidance)와 같은 접근들을 포함한다. 이러한 접근들은 vertical guidance를 제공하나 precision approach의 엄격한 기준을 충족하지는 못한다. WAAS 수신기는 WAAS electronic glide path를 통해 LPV minima와 LNAV/VNAV minima로 비행할 수 있게 해준다. 이는 Barometric altimetry를 사용하였을 때 발생할 수 있는 오차를 제거한다.
2. LPV minima는 WAAS가 제공하는 높은 정확도의 안내, 그리고 향상된 무결성을 활용한다. WAAS가 만들어낸 각도 정보를 통해 TERPS 접근 기준(ILS 접근에 사용되는 기준)을 사용할 수 있다. LPV minima는 최소 200ft HAT(height above touchdown)의 결심고도, 그리고 최소 1/2마일의 시정을 가질 수 있다. LPV minima는 RNAV(GPS) approach charts에 게재되어 있다(paragraph 5-4-5, Instrument Approach Procedure Charts 참조).
3. 지형이나 장애물이 vertically guided LPV minima를 허용하지 않는 곳에서는 LP(Localizer Performance)가 WAAS-based line of minima에 추가된다. LP는 WAAS가 제공하는 angular lateral guidance, 그리고 작아진 위치 오류를 활용하여 lateral only procedure를 제공한다(ILS Localizer와 유사). LP procedures는 LNAV 절차보다 minima가 더 낮을 수 있다. 이는 장애물 회피 표면이 더 좁기 때문이다.
NOTE -
TSO-C145b와 TSO-C146b 이전에 증명된 WAAS 수신기는 설령 LPV 기능을 갖추고 있더라도 LP 기능을 포함하지 않는다(단, 수신기가 업그레이드된 경우 제외). LP procedures를 비행할 수 있는 수신기는 LP 기능, 그리고 그 외의 WAAS 및 GPS approach procedures 기능이 있다는 내용을 AFM, AFM Supplmenet, 혹은 Approved Supplemental Flight Manual에 포함해야 한다.
4. WAAS는 시스템 범위 내 모든 비행 단계를 지원하는 수준의 서비스를 제공한다. 여기에는 LNAV, LP, LNAV/VNAV, 그리고 LPV lines of minima로 향하는 RNAV(GPS) approaches를 포함한다. 서비스 범위의 끝자락에 가까운 일부 위치는 vertical guidance의 가용성이 낮을 수 있다.
c. General Requirements
1. WAAS 항전 장치는 TSO(Technical standard Order) TSO-C145(), Airborne Navigation Sensors Using the (GPS) Augmented by the Wide Area Augmentation System(WAAS), 혹은 TSO-C146(), Stand-Alone Airborne Navigation Equipment Using the Global Positioning System(GPS) Augmented by the Wide Area Augmentation System(WAAS)에 따라 증명되어야 한다. 그리고 이들은 AC 20-138, Airworthiness Approval of Positioning and Navigation Systems에 따라 설치되어야 한다.
2. GPS/WAAS 작동은 AFM 및 flight manual supplements에 따라 수행되어야 한다. flight manual supplements는 수신기가 지원하는 접근 절차의 수준을 명시한다. IFR approved WAAS receivers는 적절한 수준의 lateral capability가 기능하는 한 모든 GPS only operations를 지원한다. WAAS는 GPS와 WAAS 위성들을 모두 모니터링하며 무결성을 제공한다.
3. 만약 운영자가 FDE(fault detection and exclusion) prediction program을 가지고 있다면 GPS/WAAS 장비는 기본적으로 oceanic operation과 remote operation을 지원할 수 있다.
4. air carrier operator와 commercial operator는 그들의 운영 기준(operations specifications) 규정을 충족해야 한다.
5. GPS/WAAS IFR 운영을 수행하기 전에 조종사는 적절한 NOTAM(Notices to Air Missions)과 항공 정보를 검토해야 한다. 이러한 정보는 Flight Service Station에 요청 시 제공된다. FAA는 WAAS의 상태, 그리고 이용 가능한 서비스 수준을 알리기 위해 NOTAM을 제공한다.
(a) MAY NOT BE AVBL이라는 용어가 WAAS NOTAM과 함께 사용된다. 이는 전리층 조건으로 인해 lateral guidance는 여전히 이용 가능하나 vertical guidance는 이용 불가능함을 나타낸다. 특정 조건에서는 lateral guidance와 vertical guidance를 모두 이용할 수 없다. 이러한 NOTAM은 적절한 WAAS 서비스 수준(LNAV/VNAV, LPV, LP)이 제공되지 않을 수 있음을 나타낸다.
EXAMPLE -
!FDC FDC NAV WAAS VNAV/LPV/LP MINIMA MAY NOT BE AVBL 1306111330-1306141930EST
!FDC FDC NAV WAAS VNAV/LPV MINIMA NOT AVBL, WAAS LP MINIMA MAY NOT BE AVBL 1306021200-1306031200EST
WAAS MAY NOT BE AVBL NOTAM은 사실상 예측적인 것으로 이는 비행 계획 용도로 게재된다. WAAS MAY NOT BE AVBL으로 NOTAM이 발부된 지역에서 접근을 시작할 때 WAAS 항전 장치가 LNAV/VNAV, 혹은 LPV 서비스를 이용할 수 있다고 표시할 경우 접근을 완료하기 위해 vertical guidance를 사용할 수 있다. 접근 도중 WAAS 중단이 발생한 경우 LNAV minima로 전환한다(혹은 대체 계기 접근 절차가 필요할 수 있음).
(b) WAAS가 중단되었으며 서비스 영역에 영향을 미칠 경우 WAAS area-wide NOTAM이 발부된다. Area-wide WAAS NOT AVAILABLE(AVBL) NOTAM은 WAAS 시스템의 중단, 혹은 고장을 나타낸다. 만약 ATIS에 WAAS NOT AVBL NOTAM이 포함되어있지 않다면 ATC는 GPS approach나 RNAV(GPS) approach를 요청하는 조종사에게 이를 알린다.
EXAMPLE -
계획에 없던 신호 중단의 경우 NOTAM의 예는 다음과 같다: !FDC FDC NAV WAAS NOT AVBL 1311160600-1311191200EST.
계획되었던 신호 중단의 경우 NOTAM의 예는 다음과 같다: !FDC FDC NAV WASS NOT AVBL 1312041015-131208200EST.
(c) site-specific WAAS MAY NOT BE AVBL NOTAM은 예상되는 서비스 수준을 나타낸다. 예를 들어, LNAV/VNAV, LP, 혹은 LPV를 사용하지 못할 수도 있다. 조종사는 비행 계획 도중 site-specific WAAS NOTAM을 요청해야 한다. 비행 도중 ATC는 조종사에게 WAAS MAY NOT BE AVBL NOTAM을 알리지 않는다.
NOTE -
FAA는 향후 이러한 site-service를 제공하기 위한 prediction tool software를 업데이트하고 있다.
(d) 북미 대부분은 두 개 이상의 정지궤도 위성을 통한 중복된 범위를 가지고 있다. 한 가지 예외는 알래스카의 북쪽 경사이다. 만약 위성이 이 지역을 커버하는데 문제가 있다면 다음과 같은 예시의 NOTAM이 발부된다:
EXAMPLE -
!FDC 4/3406 (PAZA A0173/14) ZAN NAV WAAS SIGNAL MAY NOT BE AVBL NORTH OF LINE FROM 7000N150000W TO 6400N16400W. RMK WAAS USERS SHOULD CONFIRM RAIM AVAILABILITY FOR IFR OPERATIONS IN THIS AREA. T-ROUTES IN THIS SECTOR NOT AVBL. ANY REQUIRED ALTERNATE AIRPORT IN THIS AREA MUST HAVE AN APPROVED INSTRUMENT APPROACH PROCEDURE OTHER THAN GPS THAT IS ANTICIPATED TO BE OPERATIONAL AND AVAILABLE AT THE ESTIMATED TIME OF ARRIVAL AND WHICH THE AIRCRAFT IS EQUIPPED TO FLY. 1406030812-1406050812EST.
6. GPS testing NOTAM이 게재되었으며 실제로 테스트가 진행 중일 경우 ATC는 GPS approach, 혹은 RNAV(GPS) approach를 요청한(혹은 이미 승인한) 조종사에게 GPS를 이용할 수 없음을 알리고 의도를 요청한다. 만약 조종사가 GPS의 이상을 보고하였다면 ATC는 조종사에게 의도를 요청하거나, 혹은 대체 접근(만약 이용 가능하며 현재 운영 중인 경우)을 승인한다.
EXAMPLE−
다음은 GPS testing NOTAM의 예시이다: !GPS 06/001 ZAB NAV GPS (INCLUDING WAAS, GBAS, AND ADS-B) MAY NOT BE AVAILABLE WITHIN A 468NM RADIUS CENTERED AT 330702N1062540W (TCS 093044) FL400-UNL DECREASING IN AREA WITH A DECREASE IN ALTITUDE DEFINED AS: 425NM RADIUS AT FL250, 360NM RADIUS AT 10000FT, 354NM RADIUS AT 4000FT AGL, 327NM RADIUS AT 50FT AGL. 1406070300-1406071200.
7. 접근 차트에 “W” 기호가 표시된 경우 WAAS LNAV/VNAV 및 LPV vertical service의 중단에 대한 site-specific WAAS MAY NOT BE AVBL NOTAM, 혹은 Air Traffic advisories가 제공되지 않는다.
이러한 위치에서는 vertical guidance의 중단이 날마다 발생할 수 있다. 이는 WAAS 시스템 적용 범위의 가장자리에 가깝기 때문이다. 이러한 위치가 목적지 공항이든 교체비행장이든 비행 계획을 위해 LNAV minima나 circling minima를 사용한다. 이러한 위치에서 비행할 때 만약 WAAS 항전 장치가 LNAV/VNAV, 혹은 LPV 서비스가 가능하다 표시한다면 vertical guidance를 사용하여 접근을 완료할 수 있다. 접근 도중 WAAS 중단이 발생할 경우 LNAV minima로 되돌려야 할 수 있다.
NOTE -
Area-wide WAAS NOT AVBL NOTAM은 접근 차트에 “W” 기호가 달린 공항의 접근, 그리고 NOTAM에서 지정된 WAAS NOT AVBL area의 모든 공항에 적용된다.
8. GPS/WAAS는 다른 무선 항법 장비의 필요 없이 북미 전역의 GEO 범위 내에서 사용될 수 있도록 개발되었다. WAAS 범위를 벗어나거나, 혹은 WASS가 고장 난 경우 GPS/WAAS 장비는 GPS-only operation으로 되돌아간 다음 기본 GPS 장비에 대한 조건들을 충족한다. (이 조건들은 paragraph 1-1-17을 참조).
9. TSO-C129 항전 장치는 다른 항법 수단의 보충물로 증명된다. 허나 WAAS 항전 장치는 다른 항법 시스템을 의존하지 않는다 평가된다. 따라서 WAAS 항전 장치는 항공기가 비행할 경로에 적절한 다른 장비를 필요로 하지 않는다. (장비 조건에 대한 자세한 내용은 paragraph 1-1-17 참조).
(a) WAAS 수신기를 가진 조종사는 WAAS 항전 장치를 사용하도록 승인된 모든 계기 접근 절차를 교체비행장에 대해 계획할 수 있다. 단, 다음과 같은 제한 사항을 준수한다. 교체비행장에서 WAAS를 사용하는 경우 비행 계획은 다음을 기반으로 해야 한다: RNAV(GPS) LNAV minima이나 circling minima를 비행하는 것, 혹은 GPS approach procedure의 minima를 비행하는 것, 혹은 접근 명칭에 “or GPS”가 있는 기존 절차의 minima를 비행하는 것. CFR Part 91 non-precision weather requirements가 계획에 사용되어야 한다. 교체비행장 입항 시 WAAS 항법 시스템이 LNAV/VNAV, 혹은 LPV 서비스를 이용할 수 있다 표시할 경우 접근을 완료하기 위해 vertical guidance를 사용할 수 있다. FAA는 일부 RNAV(GPS) approach와 GPS approach 절차들로부터 “ANA(Alternate Minimums Not Authorized)” 기호를 제거하기 시작하였다.
따라서 교체비행장에서 이러한 접근들을 approach approved WAAS receivers를 통해 이용할 수 있다. 일부 접근 절차들은 몇몇 이유 때문에 여전히 ANA를 필요로 한다(예를 들어 weather reporting이 없음). 이로 인해 ANA가 모든 절차들로부터 제거될 수는 없다. 모든 절차들이 개별적으로 평가되어야 하므로 RNAV(GPS) procedure와 GPS procedure에서 ANA를 제거하는데 시간이 좀 걸릴 것이다.
NOTE -
WAAS 사용자(TSO-C145() 및 TSO-C146() 사용자)가 baro-VNAV 장비를 사용할 경우 교체비행장에서 LNAV/VNAV DA를 계획할 수 있다. 특별히 승인된 WAAS 사용자가 baro-VNAV 장비를 사용할 경우 RNP 0.3 DA를 계획할 수 있다(단, 조종사가 prediction program을 통해 RNP 가용성을 확인해야 함).
d. Flying Procedures with WAAS
1. WAAS receivers는 모든 기본 GPS approach 기능을 지원하며 추가적인 기능을 제공한다. 주요 개선 사항 중 하나는 지상 장비나 barometric aiding과 관계없이 glide path guidance를 생성할 수 있다는 것이다. 이는 몇 가지 문제들(예를 들어 뜨거운/차가운 기온의 영향, 부정확한 altimeter setting, 혹은 local altimeter source가 없음)을 제거한다. 또한 이는 각 공항이나 활주로에 지상국을 설치하는 비용 없이도 접근 절차를 구축할 수 있게 해준다. 일부 approach certified receivers는 Baro-VNAV와 유사한 성능의 glide path만을 생성할 수 있다. 이는 RNAV(GPS) approach charts의 LNAV/VNAV line of minima만 비행할 수 있도록 승인된다. 추가적인 기능(더 빠른 업데이트 속도, 그리고 더 작은 무결성 한계)을 갖춘 수신기는 LPV line of minima를 비행하도록 승인된다. GPS, LNAV, 그리고 LNAV/VNAV approach mode를 위한 0.3NM(556미터)의 lateral integrity가 LPV의 경우 40m로 크게 변경된다. 또한 250ft 이상의 minima를 가진 LNAV/VNAV와 LPV의 경우 수직 오차를 50m로 제한하는, 그리고 250ft 미만의 minima를 가진 LPV의 경우 수직 오차를 35m로 제한하는 vertical integrity 모니터링을 제공한다.
2. 접근 절차가 선택 및 활성화되면 수신기는 접근 절차의 minima lines 명칭을 통해 가장 정확한 서비스 수준을 조종사에게 알려준다. 이러한 서비스 수준은 WAAS 신호, 수신기, 그리고 선택된 접근의 조합을 통해 지원된다. 예를 들어 만약 접근이 LPV minima를 게재하고 있으나 수신기는 LNAV/VNAV에 대해서만 증명되었다면 설령 WAAS 신호가 LPV를 지원한다 하더라도 수신기는 “LNAV/VNAV available”을 표시한다. 만약 LPV minima가 없는 LNAV/VNAV procedure를 비행한다면 설령 수신기가 LPV에 대해 증명되었으며 WAAS 신호가 LPV를 지원한다 하더라도 수신기는 “LNAV/VNAV available”을 알린다. 만약 WAAS 신호가 LPV 및/혹은 LNAV/VNAV minima를 갖춘 절차에서 vertical guidance를 지원하지 않으면 수신기의 annunciation이 “LNAV available”로 표시된다. LP 및 LNAV minima를 갖춘 lateral only procedures에서 수신기는 서비스 수준에 따라 “LP available”이나 “LNAV available”을 표시한다. 서비스 수준에 대한 알림이 제공되었다면 수신기는 접근 도중 이 모드에서 작동한다(단, 이 수준의 서비스를 이용할 수 없게 되는 경우 제외). 다음번 접근이 활성화되기 전까지는 더 정확한 서비스 수준으로 변경할 수 없다.
NOTE -
일단 접근이 활성화되었다면 수신기는 낮은 수준의 서비스로 “fail down” 되지 않는다. 만약 vertical off flag만 나타났다면 조종사는 LNAV minima를 사용하도록 선택할 수 있다(단, 절차를 시작한 후 접근 유형을 변경할 수 있도록 비행 규칙이 허용하는 경우). LP approach 도중 lateral integrity limit이 초과되었다면 실패 접근이 필요하다. 왜냐하면 접근이 활성화된 동안 lateral alarm limit을 재설정할 방법이 없기 때문이다.
3. WAAS 수신기의 또 다른 기능은 나쁜 GPS 신호를 제외하여 계속 정상적으로 작동하는 것이다. 이는 일반적으로 WAAS correction information을 통해 수행된다. WAAS 범위의 바깥인 경우, 혹은 WAAS를 이용할 수 없는 경우 이는 FDE라 불리는 수신기 알고리즘을 통해 수행된다. 대부분의 경우 이 작업을 조종사가 볼 수는 없다. 왜냐하면 수신기가 나쁜 신호를 제외한 이후 다른 위성들과 계속하여 작동하기 때문이다. 이러한 기능은 항법의 신뢰도를 높인다.
4. LNAV/VNAV approach와 LPV approach의 lateral scaling 및 vertical scaling은 기본적인 GPS의 linear scaling과는 다르다. 완전한 절차를 비행할 경우 FAF 이전 2NM 까지는 ±1NM의 linear scaling이 제공된다. FAF에서는 ILS의 angular scaling과 유사한 정도로 sensitivity가 증가한다. WAAS scaling과 ILS에는 두 가지 차이가 있다: 1) 긴 final approach segments에서 초기 scaling은 ±0.3NM이다(이는 활주로에서 멀리 떨어질수록 덜 민감한 ILS보다 좋다). 2) threshold 가까이에서는 scaling이 계속하여 민감해지는 대신 직선으로 변경된다. threshold에서 final approach course의 폭이 보통 700ft가 되도록 조정된다. final의 angular portion을 위한 lateral splay의 시작점은 localizer와 같은 안테나 배치로 인해 고정되어있지 않다. 따라서 splay angle이 일정한 상태로 유지될 수 있으며 이는 다양한 길이의 활주로에 대한 final approach course로 vector 되는 항공기에게 일정한 폭의 final을 제공한다. 완전한 절차가 비행되는 대신 항공기가 extended final approach course를 capture 해야 하는 경우 VTF(vector to final) mode가 사용된다. VTF 도중 FAWP로부터의 거리에 관계없이 ILS의 angular splay가 ±1NM 폭에 도달하기 전까지는 scaling이 ±1NM로 유지된다.
5. 또한 실패 접근의 초기 구간에 대해 WAAS scaling은 GPS TSO-C129()와 다르다. 여기서 두 가지 차이점이 발생한다. 첫째, 대략 departure end of the runway에 있을 때, 혹은 ramping 대신 조종사가 missed approach guidance를 선택하였을 때 scaling이 approach scaling에서 missed approach scaling으로 갑자기 변경된다. 둘째, 실패 접근의 첫 번째 구간이 inbound course와 3도 이내로 정렬된 TF(Track to Fix) leg인 경우 수신기는 0.3NM의 linear sensitivity로 변경된다. 이는 실패 접근 절차의 첫 번째 waypoint에 대한 선회 시작 지점(이 지점에서 terminal sensitivity(±1NM)로 갑자기 변경됨)까지 이어진다. 이는 실패 접근의 초기 구간에서 close-in obstacles를 회피할 수 있게 해준다. 그렇지 않을 경우 DA가 상승할 수 있다.
6. 계기 접근의 final approach segment를 선택하는 두 가지 방법이 있다. 대부분의 수신기는 공항, 활주로, 특정 접근 절차, 그리고 IAF를 선택하는 메뉴를 사용한다. 또한 수신기는 channel number를 선택하는 방법도 가지고 있다. 접근 차트에서 제공하는 고유한 5자리 숫자를 입력하면 수신기는 항공기 데이터베이스와 일치하는 final approach segment를 불러온다. 이용 가능한 IAF를 포함하는 정보 목록이 표시되며 조종사는 적절한 IAF를 선택한다. 조종사는 Approach ID와의 교차 점검을 통해 올바른 final approach segment가 로딩 되었는지 확인해야 한다. 이러한 ID는 접근 차트에서 제공된다.
7. minimum descent altitude를 가진 LNAV 절차의 final approach segment 도중 ATD(Along-Track Distance)는 MAWP까지이다. 결심 고도를 향한 LNAV/VNAV approach와 LPV approach에서는 missed approach waypoint가 없다. 따라서 일반적으로 threshold에 위치한 지점까지의 along-track distance가 표시된다. 대부분의 경우 LNAV approach를 위한 MAWP는 threshold에 위치한다. 따라서 이러한 거리들은 동일하다. 이 거리는 항상 ILS DME와 약간 다르다. 왜냐하면 ILS DME는 활주로 아래쪽에 위치하기 때문이다. LNAV/VNAV approach와 LPV approach에서의 실패 접근 수행은 14 CFR Section 91.175에 나열된 것들이 보이지 않는 상태에서 결심 고도에 도달한 것을 기반으로 한다. 또한 ATD가 0에 도달하기를 기다리면서 실패 접근의 수행을 지연해서는 안 된다. 만약 missed approach procedure가 RNAV용으로 설계되었다면 WAAS 수신기는 GPS 수신기와는 달리 MAWP를 통과한 다음 자동으로 sequencing을 수행한다. 조종사가 MAWP에 도달하기 전에 missed approach를 선택할 수도 있다. 허나 MAWP에 도달한 이후 waypoint sequencing이 수행된다.
1-1-19. Ground Based Augmentation System(GBAS) Landing System(GLS)
a. 공항의 GBAS 지상 설비는 GPS 신호에 국지적 differential augmentation을 제공하여 항공기의 GLS precision approach 기능을 가능하게 만든다. GBAS 서비스와 항공기의 GLS 장치를 통해 조종사는 활주로를 향한 3차원의 angular, lateral, 그리고 vertical guidance를 제공하는 계기 접근을 완료할 수 있다. GLS approach의 운영상 이점은 ILS approach, 혹은 LPV approach 운영의 이점과 유사하다.
NOTE -
국제적 용어와의 일관성을 위하여 LAAS(Local Area Augmentation System)이라는 용어 대신 GBAS라는 용어를 사용한다.
b. 항공기의 GLS approach 기능은 GGF(GBAS Ground Facility) 장치의 방송에 의존한다. GGF 장치는 공항 활주로 근처에 위치한 최소 네 개의 ground reference stations, corrections processor, 그리고 VDB(VHF Data Broadcast) uplink antenna를 포함한다. GBAS GGF를 사용하기 위해, 그리고 GLS approach를 수행하기 위해서는 항공기가 RNP approach(RNP APCH)를 수행할 자격을 갖추어야 한다. 또한 항공기는 GBAS 수신기의 설치를 위한 추가적인 specific airworthienss requirements를 충족해야 한다. 항공기가 GLS approach를 수행할 자격을 갖추었다면 항공기의 항법 데이터베이스에 GLS 계기 접근 절차가 포함될 수 있다.
(ATP: 조종사는 FMS menu에서 5자리 GBAS channel number를 선택하거나, 혹은 직접 다섯 자리를 입력한다. 절차를 선택한 후 올바른 GBAS가 로딩되었는지 확인하기 위해 차트의 RPI(Reference Path Indicator)나 approach ID를 화면에 표시된 RPI와 교차 점검한다. 혹은 일부 시스템의 경우 RPI 모스 코드를 음성 식별한다. GLS approach가 선택 및 식별되었다면 ILS와 동일한 기법을 사용하여 접근을 수행한다.)
c. GLS 계기 접근 절차 도중 항공기의 GLS 장치는 3차원(3D)의 수평 및 수직 항법 안내를 제공한다(ILS 계기 접근과 매우 유사). GBAS corrections는 position corrections를 제공함으로써 GPS 신호를 보강하고, 향상된 integrity parameters의 가용성을 확인한 다음, 실제 접근 경로를 VDB uplink antenna를 통해 전송한다. 하나의 GBAS 지상국은 하나 이상의 활주로에 대한 다수의 GLS approaches를 지원할 수 있다.
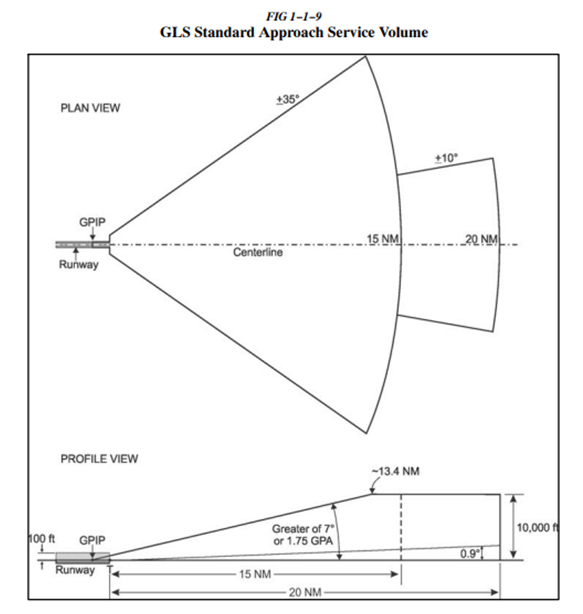
d. GLS approach는 GBAS ground station을 통해 기존의 ILS 서비스 범위와는 다른 독특한 운영 범위를 제공한다(그림 1-1-9 참조). final approach segment에서 GLS approach는 ILS approach의 정밀한 안내를 모방한 수평 및 수직 안내를 제공한다.
e. GLS 계기 접근 절차의 IAF 이전에 RNAV 1, 혹은 RNP 1을 사용해야 할 수 있다. 이후 GLS approach procedure는 RNP APCH procedure 설계 기준(“RNAV(GPS)”라는 제목의 절차를 게재하는데 사용되는 기준)을 사용하여 경로를 구성한다. 따라서 GLS approach procedure는 항공기가 IAF를 통과한 후 GLS approach flight guidance mode로 진입하기 전에 선회를 필요로 하는 경로를 포함할 수 있다. 마찬가지로 GLS approach procedure를 위한 missed approach procedure는 RNP APCH를 지원하는 missed approach 기준을 전적으로 의존한다.
f. final approach segment 이전에 GLS approach를 교차하는 ATC clearance에 따라 항공기를 비행할 경우(예를 들어 vector 도중) 조종사는 clearance를 준수해야 하며 항공기가 특정 서비스 범위 내의 extended GLS final approach course를 교차하도록 해야 한다. GLS final approach course에 도착하였다면 조종사는 절차의 glidepath intercept point에 도달하기 전에 항공기가 GLS approach mode에 있는지 확인해야 한다. 항공기가 GLS flight guidance mode에 있으며 GLS glidepath를 capture 하였다면 조종사는 ILS final approach(혹은 LPV minimums로 비행하는 RNAV approach의 final approach)를 비행하기 위해 사용하는 것과 동일한 조종 기술을 사용하여 GLS final approach segment를 비행해야 한다. GLS instrument approach procedure를 수행하는 방법에 대한 자세한 내용은 Instrument Procedures Handbook을 참조한다.
1-1-20. Precision Approach Systems other than ILS and GLS
a. General
ILS와 GLS 이외의 정밀 접근 시스템에 대한 승인 및 사용은 special instrument approach procedures의 발행을 필요로 한다.
b. Special Instrument Approach Procedure
1. 게재된 절차와 조종사 교육, 항공기 장비, 및/혹은 항공기 성능이 다를 경우 special instrument approach procedures가 항공기 운영자에게 발부되어야 한다. special instrument approach procedures는 일반 대중용으로 배포되지 않는다. 이러한 절차는 운영 승인을 위한 조건이 충족될 경우 항공기 운영자에게 발부된다.
2. special procedures를 위한 승인을 요청하는 general aviation operators는 Flight Standards District Office에 연락하여 승인서를 받아야 한다. special procedures를 위한 승인을 요청하는 air carrier operators는 그들의 운영 기준(Operations Specifications)을 통해 Certificate Holding District Office에 문의하여 승인을 받아야 한다.
c. Special Category I Differential GPS(SCAT-I DGPS)
1. SCAT-I DGPS는 GPS에 differential correction을 방송함으로써 접근 안내를 제공하도록 설계되었다.
2. SCAT-I DGPS 절차는 항공기 장비와 조종사 훈련을 필요로 한다.
3. 지상 장비는 GPS 수신기, 그리고 VHF 디지털 무선 송신기로 구성된다. SCAT-I DGPS는 GPS 수신기와 관련된 GPS 위성의 위치를 감지한다. 그리고 VHF 디지털 라디오를 통해 differential corrections를 방송한다.
4. 공용 서비스를 위해 Category I GBAS(Ground Based Augmentation System)가 SCAT-I DGPS를 대체한다.
REFERENCE -
AIM, Para 5-4-7 j, Instrument Approach Procedures.