Engine Inoperative Flight Principles
OEI operations에는 성능(performance)과 제어(control)라는 두 가지 주요 고려 사항이 있다. 다발 비행기 조종사는 sideslip 없이 비행하는 훈련을 통해 비행기가 blue radial indicated airspeed에서 최대 상승 성능으로 운영되는 방법을 배운다. 또한 조종사는 VMC demonstration을 통해 red radial indicated airspeed와 연관된 방향 제어 상실을 인지 및 회복하는 방법을 배운다. VMC demonstration의 목적은 성능이 아니므로 기동 도중 sideslip이 발생한다. 방향 제어 상실과 최대 OEI 상승 성능에 대한 자세한 설명은 다음과 같다.
Derivation of VMC
VMC는 제조업체가 설정한 속도로 AFM/POH에 게재되며 대부분의 속도계에 red radial line으로 표시된다. 똑똑한 다발 비행기 조종사는 VMC가 모든 조건에 대해 고정된 속도가 아니라는 것을 안다. VMC는 항공기 증명 도중 매우 특정한 상황에 대해 결정된 고정된 속도이다. 실제로 VMC는 아래에 설명된 다양한 요소들에 의해 달라진다. 조종사의 기술과 상황에 따라서 VMC가 AFM/POH에 게재된 값보다 더 낮거나 높을 수 있다.
과거에는 VMC의 정의가 다음과 같았다: critical engine이 작동하지 않는 상태에서 비행기의 제어가 유지될 수 있는, 그리고 5도 이하의 bank angle에서 감속 없이 직진 비행을 유지할 수 있는 sea level calibrated airspeed.
앞서 설명한 내용은 동적(dynamic) 조건에서 VMC를 결정하는 것과 관련된다. 이러한 기술은 항공기 형식 증명 도중 고도로 숙련된 테스트 파일럿이 사용하는 방식이다. 형식 증명 이외의 상황에서 이 기술을 시도하는 것은 안전하지 않다.
항공기 형식 증명 도중 정적(static) 조건에서 VMC를 결정하기도 한다. 동적 조건과 정적 조건에서 측정된 VMC 값이 다르면 둘 중 높은 값이 VMC로 게재된다. 정적 조건에서는 단순히 VMC 속도에서 5도 이하의 bank angle로 직진 비행을 유지할 수 있는지 평가한다. 이는 다발 한정 실기 시험에서의 VMC demonstration과 더 유사하다.
AFM/POH에 게재된 VMC는 critical engine이 작동하지 않는 상태에 대해 결정된다. critical engine(임계 엔진)이란 엔진 고장 발생 시 방향 제어에 가장 악영향을 미치는 엔진을 의미한다. 조종석에서 바라보았을 때 양 쪽 엔진이 시계 방향으로 회전한다면 critical engine은 좌측 엔진이 될 것이다.
다발 비행기는 P-factor의 영향을 받는다. 비행기가 양의 받음각 상태에 있다면 각 엔진의 하강하는 프로펠러는 상승하는 프로펠러보다 더 많은 추력을 생산할 것이다. 또한 우측 엔진의 하강하는 프로펠러는 좌측 엔진의 하강하는 프로펠러보다 무게 중심에서 더 멀리 떨어져 있으며 따라서 더 긴 moment arm을 가진다. 결과적으로 좌측 엔진이 고장 나면 우측 엔진이 남은 추력을 발생시키므로 비대칭 추력(adverse yaw)이 최대로 발생한다. [그림 13-12]

많은 다발 비행기가 counter-rotating right engine으로 설계되었다. 이 설계에서는 어느 쪽 엔진이 작동하지 않든 비대칭 추력의 크기가 동일하다. 더 중요한 엔진(critical engine)은 없으며 어느 쪽 엔진으로도 VMC demonstration을 수행할 수 있다.
다음 항목들은 과거 14 CFR part 23, section 23.149에 따라 증명된 다발 비행기들의 VMC 속도에 영향을 미치는 여러 가지 요인을 설명한다. 다음 항목들은 제조업체가 게재한 속도가 결정되는데 사용된 조건들도 설명한다. 과거에는 14 CFR part 23, section 23.149에 설명된 다음 조건에 따라 dynamic VMC가 결정되었다.
∙ Maximum available takeoff power initially on each engine(section 23.149(b)(1)). 작동 중인 엔진의 출력이 높아질수록 VMC가 증가한다. 자연 흡기식 엔진의 경우에는 해수면에서 이륙 출력을 사용할 때 VMC가 가장 높으며 고도가 높아질수록 감소한다. turbocharged engine에서는 이륙 출력이 엔진의 critical altitude(엔진이 더는 100% 출력을 유지할 수 없는 고도)까지 일정하게 유지되므로 VMC도 일정하게 유지된다. critical altitude 너머에서는 자연 흡기식 엔진처럼 VMC가 감소한다. 사고를 방지하기 위해 테스트 파일럿은 다양한 고도에서 VMC 테스트를 수행한 후 테스트 결과들을 하나의 해수면 값으로 추정한다.
∙ All propeller controls in the recommended takeoff position throughout VMC determination(section 23.149(b)(5)). 작동하지 않는 엔진의 항력이 증가할수록 VMC가 증가한다. 따라서 critical engine의 프로펠러가 low pitch · high rpm으로 windmilling 할 때 VMC가 최대이다. VMC는 보통 critical engine의 프로펠러가 takeoff position에서 windmilling 할 때 결정된다(단, 엔진이 autofeather system을 장착한 경우 제외).
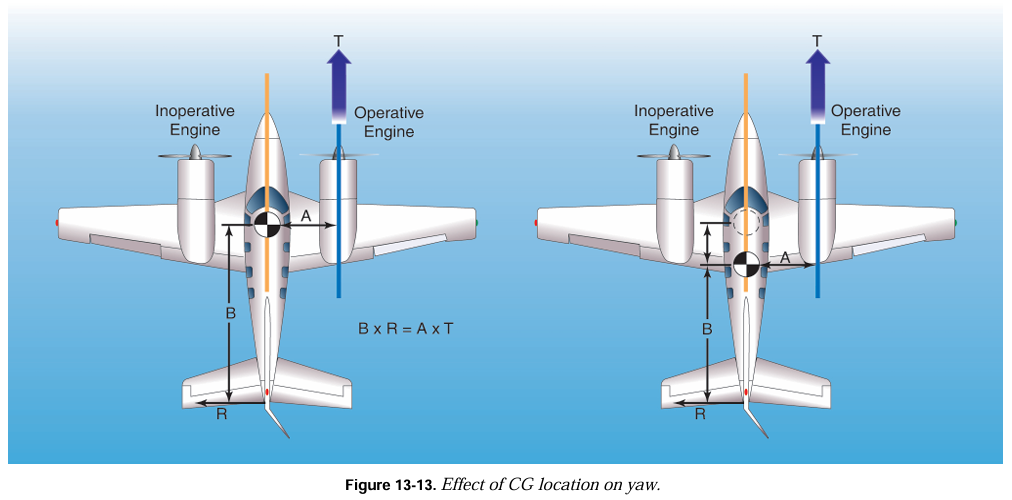
∙ Most unfavorable weight and center-of-gravity position(section 23.149(b)). 무게중심(CG)이 뒤로 이동할수록 VMC가 증가한다. CG가 뒤로 이동할수록 rudder의 moment arm이 감소하므로 rudder의 효율 또한 감소한다. 전형적인 light twin에서 aft-most CG limit는 가장 좋지 않은 CG 위치이다. 과거에 14 CFR part 23은 가장 좋지 않은 무게 조건에서 VMC가 결정되도록 규정하였다. CAR 3이나 초기 14 CFR part 23에 따라 증명된 다발 비행기에서는 VMC가 결정되는 무게가 명시되지 않는다. 무게가 감소할수록 VMC가 증가한다. [그림 13-13]
∙ Landing gear retracted(section 23.149(b)(4)). landing gear를 올리면 VMC가 증가한다. landing gear는 방향 제어에 도움을 주어서 VMC를 감소시키는 경향이 있다.
∙ Flaps in the takeoff position(section 23.149(b)(3)). 이는 보통 wing flaps와 cowl flaps를 포함한다. 대부분의 다발 비행기에서 이는 flaps 0°일 것이다.
∙ Airplane trimmed for takeoff(section 23.149(b)(2)).
∙ Airplane airborne and the ground effect negligible(section 23.149(b)).
∙ Maximum of 5˚ angle of bank(section 23.149(a)). VMC는 bank angle에 매우 민감하다. 항공기 형식 증명 도중 비현실적으로 낮은 VMC 속도가 게재되는 것을 방지하기 위해 제조업체는 작동 중인 엔진 쪽으로 최대 5˚의 bank angle을 사용할 수 있다. sideslip을 사용하는 대신 bank에서 발생하는 양력의 수평 성분으로 rudder의 횡력(side force)과 균형을 맞춘다. sideslip은 더 많은 rudder를 필요로 하며 이는 결국 VMC를 증가시킨다. 높은 bank angle을 사용하면 필요한 rudder량이 감소하므로 bank angle은 VMC를 낮추는데 있어 제조업체에 유리하게 작용한다. 허나 bank angle이 커지면 양력의 수직 성분을 유지하기 위해 받음각이 커져야 하고 sideslip도 커지므로 이러한 방법은 안전하지 못하다.
bank angle이 감소하면 VMC가 증가한다. 실제로 VMC는 5도의 bank angle에서 1도가 감소할 때마다 3노트 이상씩 증가할 수 있다. VMC는 최대 5도의 bank angle에서 결정되었으므로 만약 날개가 수평으로 유지되면 AFM/POH에 게재된 VMC보다 대략 20노트 높은 속도에서 방향 제어 상실을 경험할 수 있다.
최대 5도의 bank angle은 항공기 형식 증명에 있어 제조업체에 부과된 과거의 제한 사항이다. 5도의 bank가 본질적으로 zero sideslip이나 best single-engine climb performance를 보장하지는 않는다. zero sideslip(즉, best single-engine climb performance)은 5˚ 미만의 bank angle에서 발생할 수 있다. VMC는 특정 상황에서 방향 제어를 위한 최소 속도와 관련되어 있지 상승 성능을 위한 최적의 비행기 자세나 외장과는 관련이 없다.
동적 조건에서 VMC를 결정할 때 테스트 파일럿은 mixture control을 통해 critical engine을 끄며 매 시도마다 속도를 조금씩 줄인다. VMC란 critical engine을 껐을 때 초기 heading으로부터 20도 이내로 방향 제어를 유지할 수 있는 최소 속도를 의미한다. 테스트 도중에는 상승 각도가 높은 상태에서 한 쪽 엔진을 꺼서 초기 속도를 다시 얻기 위해 pitch를 빠르게 낮춰야 했다. 다발 비행기로 전환하는 조종사는 VMC demonstration을 위해 높은 출력 상태에서 엔진을 끄거나 VSSE보다 낮은 속도에서 의도적으로 엔진을 끄면 방향 제어 상실과 사고의 가능성이 높아진다는 것을 이해해야 한다.
VMC Demo
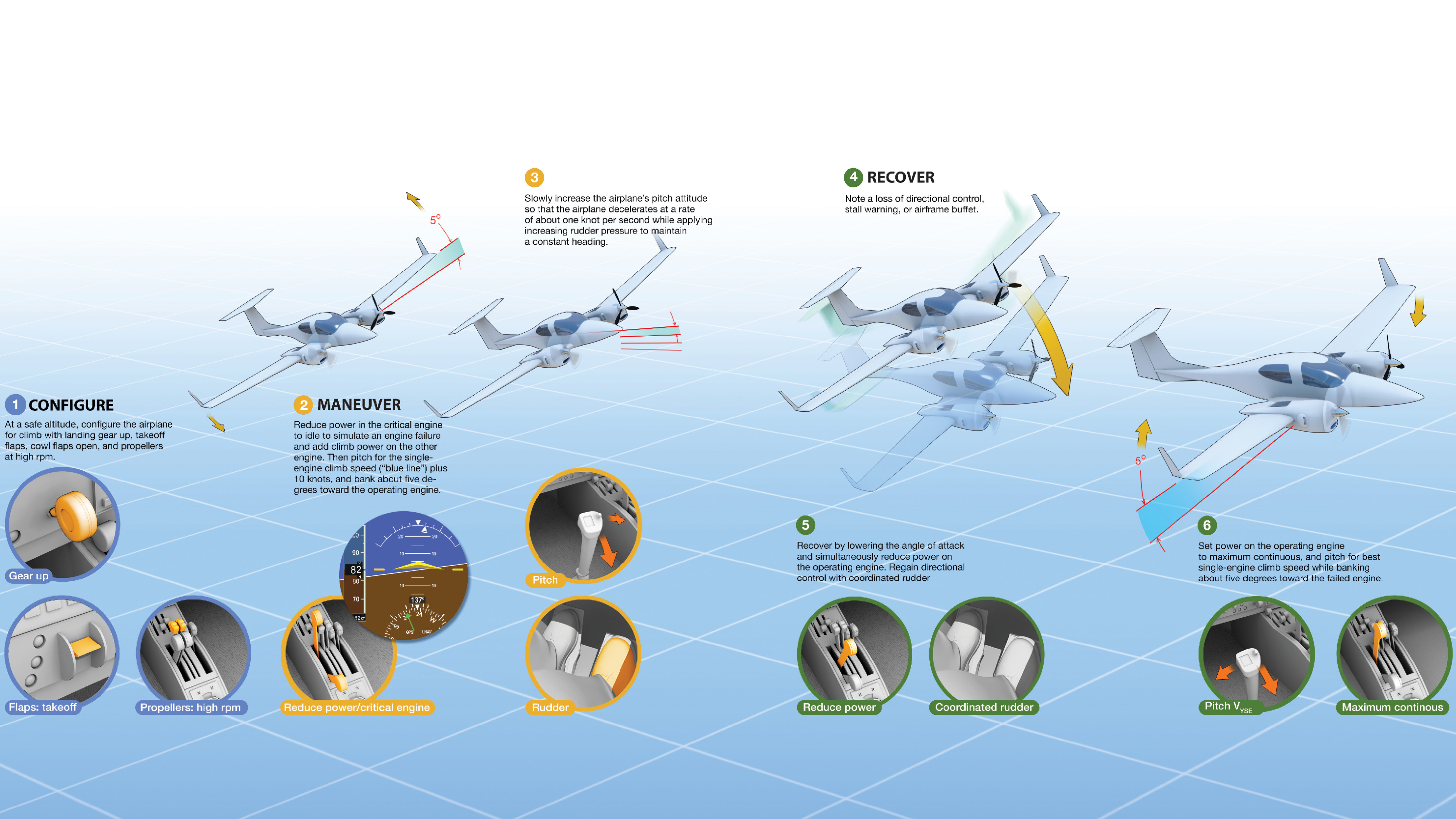
비행 훈련 도중 실제로 VMC를 시연 및 회복하는 것은 정적 조건에서 VMC를 결정하는 방법과 유사하다. 지상 충돌의 위험을 방지하기 위해 조종사는 최소 3,000ft AGL 이상에서 기동이 완료될 수 있는 고도를 선택한다. 다음 설명은 좌측 엔진이 critical engine인 non-counter-rotating engines를 가정한다.
landing gear는 올라가 있고 flaps는 takeoff position인 상태에서 대략 VSSE나 VYSE 중 더 높은 것보다 10노트 높은 속도로 감속하고 비행기를 takeoff로 trim 한다. 남은 기동 도중 trim 세팅은 변하지 않는다. 조종사는 entry heading을 선택하고 양 쪽 propeller controls를 high rpm으로 설정한다. 좌측 엔진의 출력을 idle로 줄이고 우측 엔진의 출력을 takeoff setting으로 증가시킨다. throttle이 줄여진 상태에서는 landing gear warning horn이 울리므로 조종사는 stall warning horn을 주의 깊게 듣거나 stall warning light를 주시해야 한다. 비대칭 추력으로 인한 좌측 yawing moment와 rolling moment는 주로 right rudder로 상쇄된다. 비행기 모델에 따라 최대 5도의 bank angle이 설정될 수 있다.
entry heading을 유지하는 동안 초당 1노트씩 감속하도록 pitch를 증가시킨다. 비행기가 감속해서 조종면 효율성이 감소하면 yawing tendency가 더 커지므로 rudder를 더 가한다. 설정된 bank를 유지하기 위해 aileron 압력도 증가할 것이다. 곧 최대 right rudder와 최대 5도의 bank로는 비대칭 추력을 상쇄하지 못하는 대기속도에 도달하며 비행기가 걷잡을 수 없이 좌측으로 yaw 하기 시작할 것이다.
이 걷잡을 수 없는 yaw를 인지하거나 실속과 연관된 증상을 경험한 순간 조종사는 yaw를 멈추기 위해 즉시 작동 중인 엔진의 throttle을 줄이고 속도를 얻기 위해 pitch를 낮춘다. entry heading에서 VSSE나 VYSE 속도로 직진 비행이 이뤄지도록 회복을 수행한다. 작동 중인 엔진의 출력을 증가시키고 비행이 제어되는지 시연한 후에 비대칭 추력을 회복한다.
VMC demonstration 도중 rudder 압력이 상당히 높을 수 있다. 과거 14 CFR part 23, section 23.149(e)에 따라 형식 증명을 받을 때에는 rudder에 150파운드의 힘이 허용되었다. 허나 rudder가 움직일 수 있는 거리의 한계 때문에 150파운드의 압력이 필요한 경우는 거의 없다. 하지만 VMC demonstration 도중 사용되는 rudder 압력은 여전히 상당하다고 느껴질 수 있다.
이 기동을 완료하는데 고도를 유지하는 기준은 없다. VMC demonstration은 성능이 아니라 조종성을 시연하는 것이다. 많은 비행기들이 VMC demonstration 도중 고도를 잃을(혹은 얻을) 것이다. 기동 도중 최소 3,000ft AGL 이상에 머무르는 것이 위험 완화에 효율적이라 간주된다.
VMC Demo Stall Avoidance
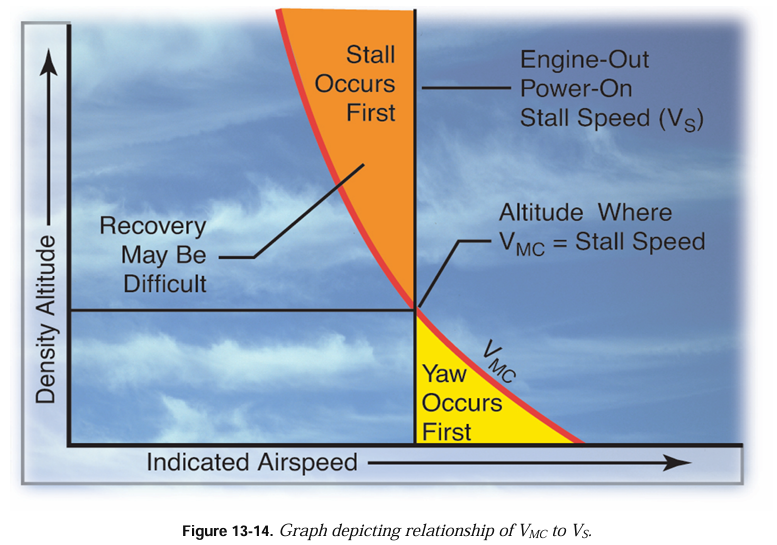
앞서 말했듯 자연 흡기 엔진의 VMC는 고도에 반비례한다. 허나 실속 속도(VS)는 동일하게 유지된다. AFM/POH에 게재된 VMC는 보통 VS보다 높다. 해수면에서는 보통 VMC와 VS 사이에 몇 노트의 여유가 있다. 허나 고도가 높아질수록 그 여유가 감소하며 특정 고도에서는 VMC와 VS가 같아진다. [그림 13-14]
비대칭 추력인 상태로 실속에 빠지면 스핀에 진입할 수 있다. 비대칭 추력으로 발생하는 yawing moment는 단발 비행기로 intentional spin 도중 full rudder를 적용하였을 때 발생하는 yawing moment와 거의 차이가 없다. 허나 다발 비행기의 경우에는 rudder를 적용한 방향이 아니라 idle 엔진 쪽으로 제어가 상실된다. 다발 비행기로는 스핀 회복을 시연할 필요가 없으며 다발 비행기의 스핀 회복 특성은 보통 매우 좋지 못하다.
VMC 이전에 VS를 맞이하면 강한 yawing tendency와 rolling tendency와 함께 순식간에 제어가 상실되어서 비행기가 뒤집히고 스핀에 진입할 수 있다. 따라서 VMC demonstration 도중 impending stall의 증상(예를 들어 stall warning light/horn, airframe/elevator buffet, 혹은 조종면 효율성의 갑작스러운 상실)이 발생하면 throttle과 AOA를 줄여서 즉시 기동을 종료하고 비행기를 기동 진입속도로 되돌려야 한다. 조종실 내부의 소음으로 인해 stall warning horn 소리가 가려질 수 있음을 유의하라.
앞선 절차에 따라 VMC demonstration을 수행하면 방향 제어 상실의 초기 단계를 알 수 있지만 실속 상황에 주의해야 한다. VMC demonstration이 single-engine stall로 전락하지 않기 위해선 비대칭 추력 상태에서의 실속을 피해야 한다. 비대칭 추력이 높은 상태에서 VMC demonstration이 single-engine stall로 전락하면 회복 불가능한 제어 상실 및 치명적 사고로 이어질 수 있다.
특정 밀도 고도이거나 VMC가 VS 이하인 경우에는 VMC demonstration을 수행할 수 없다. 이러한 상황에서는 rudder가 움직일 수 있는 거리를 인위적으로 제한해서 VMC demonstration을 안전하게 수행하는 훈련 기법이 있다. rudder가 움직일 수 있는 거리를 제한하는 경우에는 VS보다 대략 20노트 높은 속도가 권장된다.
rudder를 제한하는 기법은 비대칭 출력이 높은 상태에서의 실속으로 인한 스핀을 방지하며 방향 제어 상실을 시연하는데 효율적이다.
VMC demonstration을 수행하기 위해 높은 pitch 자세에서 한 쪽 엔진의 출력을 줄이면 방향 제어 상실의 위험이 크므로 이를 피한다.
OEI Climb Performance
최적의 OEI 상승 성능은 VYSE 속도에서 최대 가용 출력과 최소 항력을 통해 얻을 수 있다. flaps와 landing gear를 올리고 고장 난 엔진의 프로펠러를 feather 하였다면 sideslip을 최소화 하는 것이 최대 상승 성능을 위한 핵심 요소가 된다.
sideslip은 yaw string을 통해 확인될 수 있다. yaw string은 약 18~36인치의 끈이나 실을 비행기 중심선을 따라 windshield 아랫부분이나 기수에 붙인 것이다. 다발 비행기가 삼타일치 비행을 하고 있으면 상대풍으로 인해 string이 비행기의 세로축과 정렬되며 windshield의 중앙에 똑바로 위치하게 된다. 이것이 zero sideslip이다. slips와 skids를 수행하면 상대풍의 위치를 선명하게 확인할 수 있다. OEI 비행 도중에도 aileron과 rudder가 특정하게 조합되면 zero sideslip이 만들어진다. 이러한 기동을 시도할 때에는 충분한 고도, 속도, 그리고 주의를 유지해야 한다.
단발 비행기든 다발 비행기든 turn and bank instrument의 ball이 중앙에 있을 때 sideslip이 없어진다. 이러한 상태가 zero sideslip이며 비행기 측면으로 부는 상대풍이 가장 적고 그 결과로 항력이 최소이다. 조종사는 이를 coordinated flight이라 부른다.
다발 비행기의 한 쪽 엔진이 작동하지 않을 때에는 비대칭 추력으로 인해 ball이 더는 zero sideslip을 나타내지 않는다. 이제 zero sideslip을 직접 지시하는 조종실 계기는 없다. 만약 yaw string이 없다면 조종사는 특정 bank angle과 ball 위치로 비행기를 배치해야 한다. one engine inoperative에 대한 AFM/POH의 성능 차트는 zero sideslip을 기준으로 하므로 차트의 OEI 성능을 얻기 위해선 이 기술을 사용해야 한다. 고장 난 엔진의 비대칭 추력을 상쇄하는데 사용될 수 있는 조종 입력에는 두 가지가 있다:
1. rudder의 yaw
2. aileron의 bank를 통해 발생한 양력의 수평성분
rudder나 aileron을 개별적으로 사용하는 것은 옳지 않다. rudder와 aileron을 적절히 조합해서 사용하면 zero sideslip과 최대 상승 성능이 만들어진다.
항공기 조종 입력에 대한 세 가지 시나리오가 아래에 나와 있다. 첫 번째 시나리오와 두 번째 시나리오는 올바르지 않으며 제어 상실의 위험을 증가시킬 수 있다. 이들은 최대 상승 성능을 위해 zero sideslip을 사용하는 이유를 설명하기 위해 제시되었다.
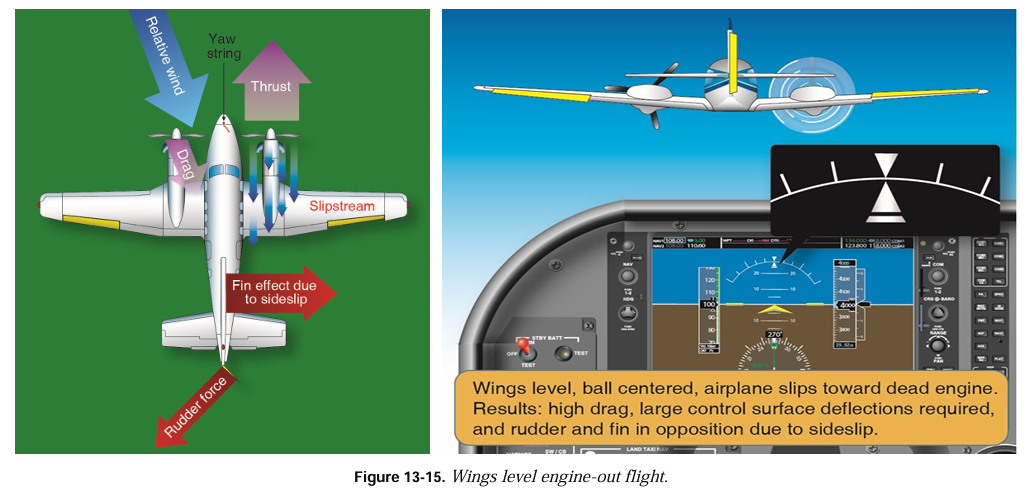
1. 날개 수평과 ball 중앙이 유지되도록 engine inoperative flight를 수행하면 작동 중인 엔진 쪽으로 rudder를 많이 적용해야 한다. [그림 13-15] 이로 인해 작동하지 않는 엔진 쪽으로 moderate sideslip이 발생한다. moderate sideslip으로 인해 상승 성능이 감소한다. 날개가 수평이 되면 rudder를 도와 비대칭 추력을 방지할 양력의 수평 요소가 없으므로 VMC가 AFM/POH에 게재된 값보다 훨씬 높아진다.
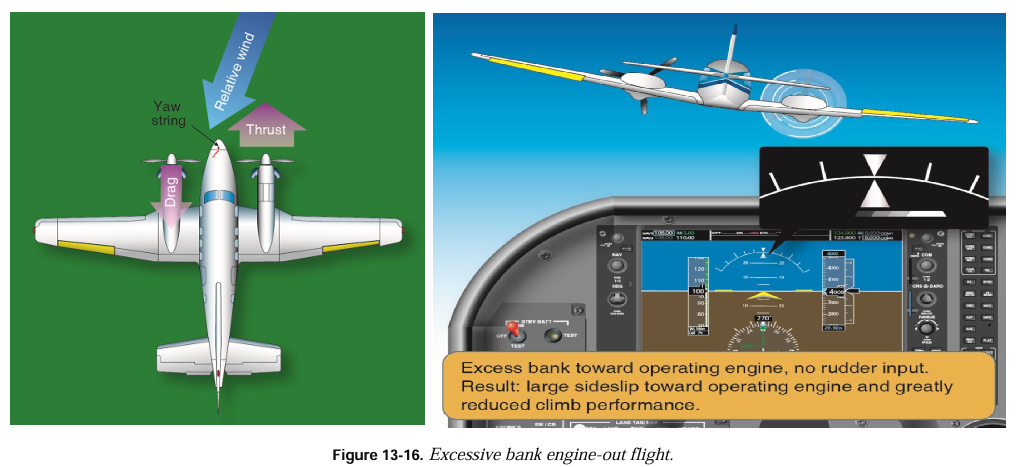
2. ailerons만으로 engine inoperative flight를 수행하면 작동 중인 엔진 쪽으로 8~10도 bank angle을 적용해야 한다. [그림 13-16] 여기서는 rudder가 적용되지 않는다 가정하므로 ball이 작동 중인 엔진 쪽으로 멀리 이동한다. 이는 작동 중인 엔진 쪽으로 large sideslip을 발생시켜서 상승 성능을 상당히 감소시킨다. 제어 상실의 위험이 커지므로 교관은 이를 시연해서는 안 된다.
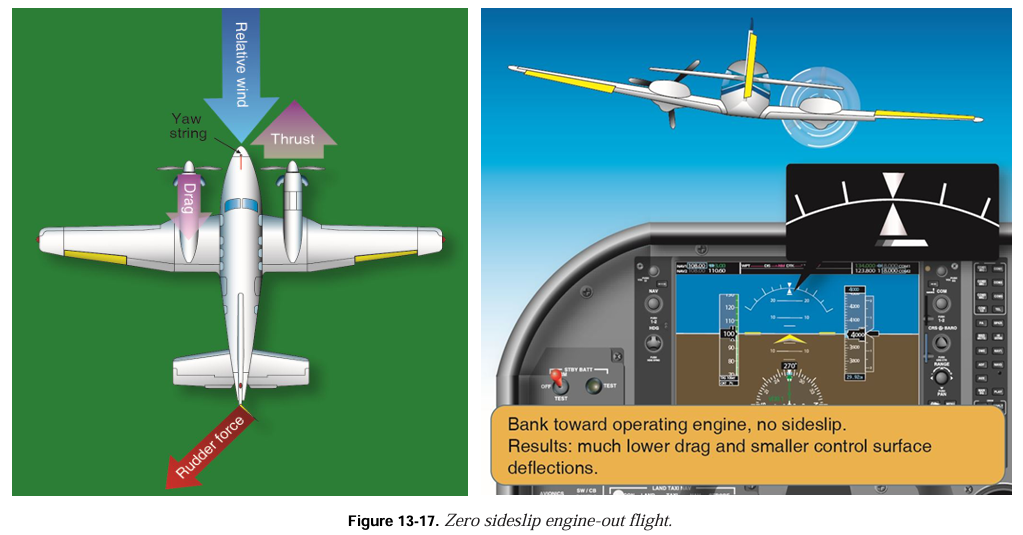
3. rudder와 ailerons를 적절한 조합해서 사용하면 작동 중인 엔진 쪽으로 약 2도의 bank가 발생한다. ball은 작동 중인 엔진 쪽으로 대략 1/3~1/2 정도 이동한다. 그 결과로 zero sideslip이 만들어지며 상승 성능이 최대가 된다. [그림 13-17] zero sideslip 이외의 자세에서는 항력이 증가해서 성능이 저하된다. 이러한 상황에서의 VMC는 AFM/POH에 게재된 값보다 클 것이다. 왜냐하면 항공기 형식 증명을 위한 5도의 bank 제한 사항보다 bank가 덜 사용되었기 때문이다.
bank angle과 상승 성능의 관계를 그래프로 나타내면 zero sideslip일 때 최대 상승 성능이나 최소 하강률이 발생한다. 비행기가 상승할 수 있는지의 여부는 비행기의 무게, 밀도 고도, 그리고 조종사의 기술에 달려있다. 만약 조종사가 zero bank를 사용하면(yaw를 상쇄하기 위해 rudder만 사용하면) moderate sideslip으로 인해 상승 성능이 저하된다. 만약 조종사가 bank angle만을 사용하면(rudder를 사용하지 않으면) large sideslip으로 인해 상승 성능이 상당히 저하된다.
zero sideslip의 정확한 조건(bank의 각도와 ball의 위치)은 비행기 모델에 따라, 그리고 가용한 출력과 대기속도에 따라 약간씩 달라진다. 또한 비행기가 non-counter-rotating propellers를 갖추고 있다면 고장 난 엔진에 따라 zero sideslip이 약간 달라진다(이는 P-factor 때문). 앞서 설명한 zero sideslip 권장사항은 작동하지 않는 엔진이 feather 된 상태에서 VYSE로 비행하는 왕복 다발 비행기에 적용된다. 직진 비행을 위한 ball 위치는 선회 비행을 위한 ball 위치와 동일하다.
zero sideslip을 위한 실제 bank 각도는 항공기에 따라 1.5 ~ 2.5도까지 다양하다. ball의 위치는 계기 중앙으로부터 작동 엔진 쪽으로 ball 폭의 1/3~1/2까지 변화한다.
특정 비행 훈련 시나리오 도중 조종사와 교관은 propeller feathering을 시뮬레이션 한다. zero thrust란 회전하는 프로펠러에서 발생하는 항력이 feathered propeller와 같아지도록 엔진 출력을 설정하는 것이다. 엔진을 zero thrust(혹은 feathered)로 설정하고 비행기를 VYSE로 감속한 상태에서 남은 엔진으로 최대 출력 상승을 수행하면 zero sideslip 및 최대 상승 성능에 필요한 정확한 bank 각도와 ball 위치를 알 수 있다. 만약 yaw string이 있다면 이는 windshield에 수직으로 정렬되어서 zero sideslip을 나타낸다. 이 zero sideslip 자세는 고장 난 엔진(non-counter-rotating propellers의 경우), 이용 가능한 출력, 대기속도, 그리고 무게에 따라 약간씩 변화하긴 하지만 이러한 변화를 감지하는 것은 어렵다. 유일한 차이는 밀도 고도, 이응 가능한 출력, 그리고 무게에 따라 VYSE를 유지하는데 필요한 pitch가 달라지는 것이다.
'Airplane Flying Handbook(2021) > 13: Transition to Multiengine Airplanes' 카테고리의 다른 글
| (16) Short-Field Approach and Landing (0) | 2022.07.17 |
|---|---|
| (17) Go-Around (0) | 2022.07.17 |
| (19) Engine Failure After Lift-Off (0) | 2022.07.17 |
| (20) Engine Failure During Flight (0) | 2022.07.17 |
| (21) Engine Inoperative Approach and landing (0) | 2022.07.17 |