Aircraft Design Characteristics
항공기 조작 방법은 항공기마다 다르다. 왜냐하면 항공기들은 저마다 다른 방식으로 조종간 압력에 저항하거나 반응하기 떄문이다. 예를 들어 훈련용 항공기는 조종간 압력에 빠르게 반응하는 반면 운송용 항공기는 조종간 압력에 느리게 반응한다. 항공기의 특정 목적을 용이하게 만들기 위해 안정성 조건과 기동성 조건을 고려한 후에 이러한 기능들을 항공기에 설계할 수 있다. 안정성∙기동성∙조종성의 중요한 측면, 안정성∙기동성∙조종성의 분석 방법, 그리고 안정성∙기동성∙조종성과 다양한 비행 조건의 관계가 아래에 설명된다.
Stability
평형 상태를 방해하는 상황들을 수정한 다음 원래의 비행경로로 돌아가려는 항공기의 고유 특성을 안정성이라 부른다. 안정성은 주된 항공기 설계 특성이다. 항공기의 비행경로와 자세는 항공기의 공기역학적 특성, 항공기의 추력 시스템, 그리고 항공기의 구조적 강도에 의해 제한된다. 이러한 제한 사항들이 항공기의 최대 성능과 기동성을 나타낸다. 최대한의 효용성을 위해선 항공기가 뛰어난 비행 기술 없이도 이러한 한계까지 안전하게 제어될 수 있어야 한다. 항공기가 임의의 비행경로를 따라 안정적인 직진 비행을 수행하기 위해선 항공기에 작용하는 힘들이 정적 평형 상태에 있어야 한다. 평형이 흐트러졌을 때 물체가 보이는 반응을 안정성이라 부른다. 안정성에는 두 가지 유형이 있다: 정안정성과 동안정성.
Static Stability
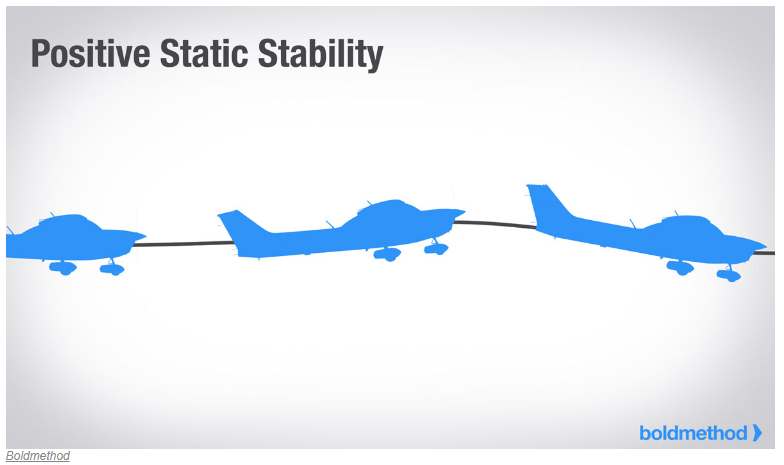
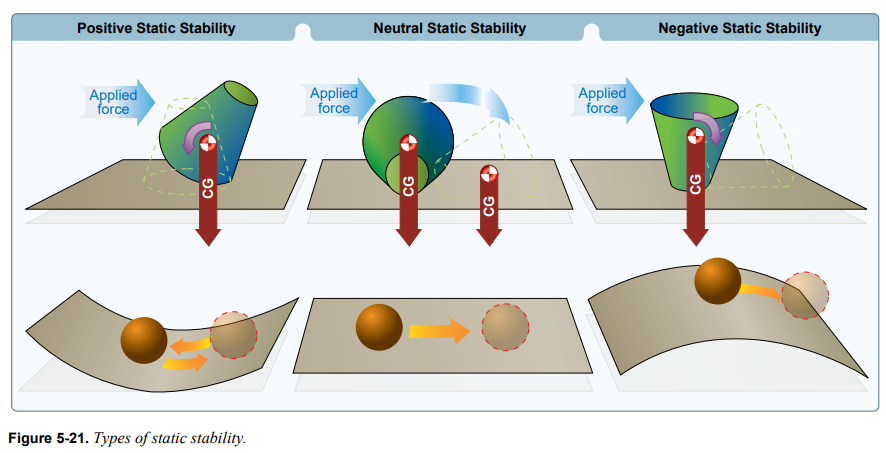
정안정성이란 평형 상태로 돌아가려는 초기 경향을 나타낸다. 여기에서는 특정 pitch, yaw, 혹은 bank 상태에서 방해를 받은 후에 항공기가 나타내는 초기 경향을 의미한다. [그림 5-21]
∙ Positive static stability – 방해를 받은 후 항공기가 원래의 평형 상태로 되돌아가려는 초기 경향.
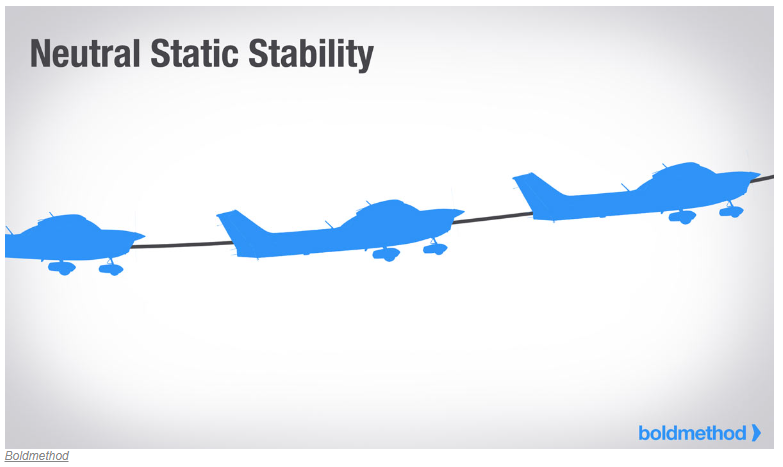
∙ Neutral static stability – 방해를 받은 후 항공기가 새로운 상태를 유지하려는 초기 경향.
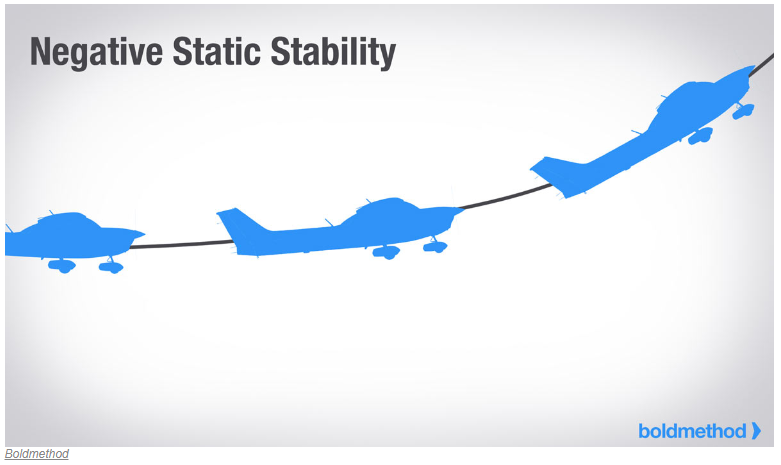
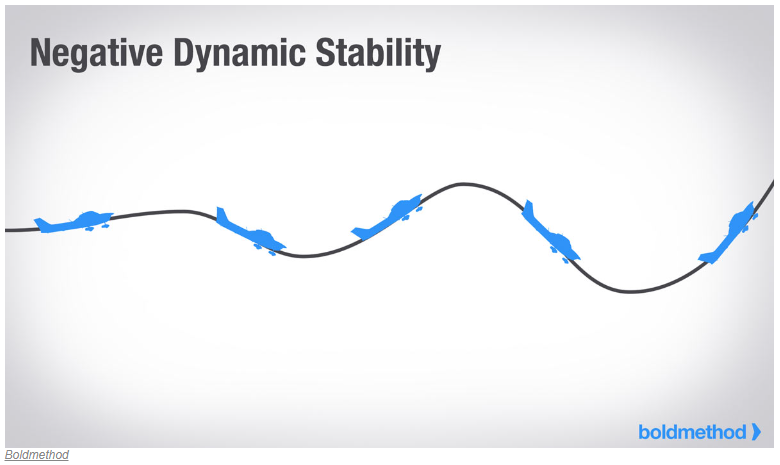
∙ Negative static stability – 방해를 받은 후 항공기가 원래의 평형 상태로부터 계속 멀어지려는 초기 경향.
Dynamic Stability
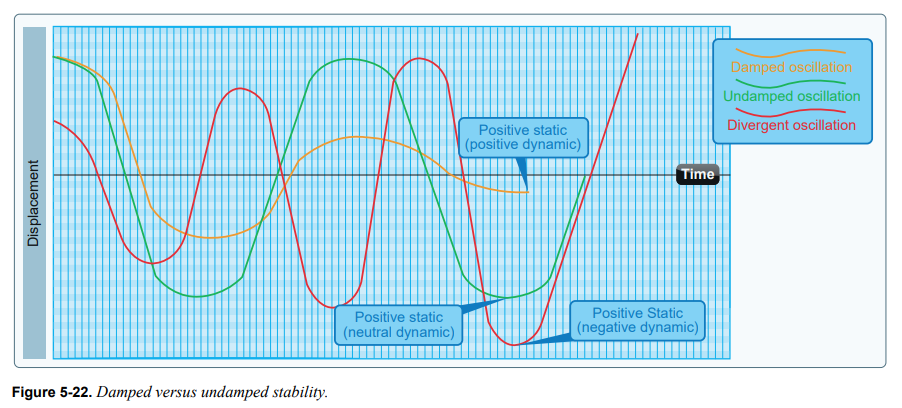
방해를 받은 후 항공기가 평형 상태로 되돌아가기 위해 나타내는 초기 경향을 정안정성이라 부른다. 초기 경향이 전반적인 경향과 반대일 수도 있으므로 두 가지가 구분되어야 한다. 특정 pitch, yaw, 혹은 bank 상태에서 방해를 받은 후에 항공기가 시간에 따라 나타내는 반응을 동안정성이라 부른다. 이러한 안정성에는 세 가지 하위 유형이 있다: [그림 5-22]
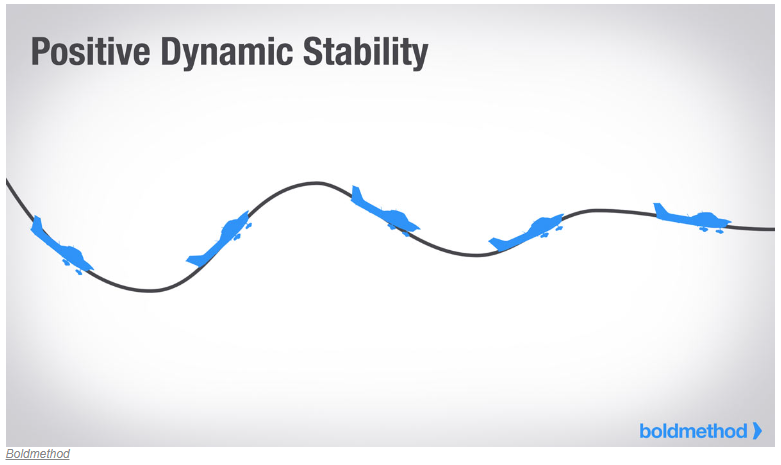
∙ Positive dynamic stability – 시간에 따라 물체가 움직이는 진폭이 감소하여 결국 평형 상태로 되돌아간다.
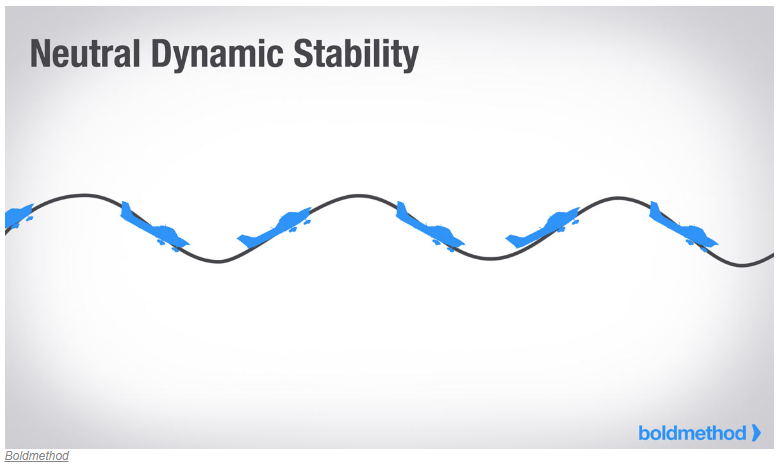
∙ Neutral dynamic stability – 물체가 움직이는 진폭이 감소하거나 증가하지 않는다.
∙ Negative dynamic stability – 시간에 따라 물체가 움직이는 진폭이 증가하여 점점 발산한다.
항공기의 안정성은 기동성과 조종성에 상당한 영향을 미친다:
∙ 기동성(Maneuverability) – 항공기를 쉽게 기동할 수 있게 해주는, 그리고 기동에 의한 응력을 견딜 수 있게 해주는 품질. 기동성은 항공기의 무게, 관성, 조종면의 크기 및 위치, 구조적 강도, 그리고 엔진에 의해 결정된다. 기동성도 항공기 설계 특성이다.
∙ 조종성(Controllability) – 항공기 기동 시 조종사의 조작에 반응하는 항공기 능력.
Longitudinal Stability(Pitching)
설계자들은 항공기의 세 축에 대해 충분한 안정성이 만들어지도록 노력한다. 허나 가로축에 대한 세로 안정성이 다양한 비행조건에서의 특정 변수들에 의해 가장 큰 영향을 받는다 고려된다.
세로 안정성은 항공기를 가로축에 대해 안정적으로 만드는 특성이다. 이는 항공기의 기수를 위/아래로 움직이는 pitching motion을 수반한다. 세로 불안정성을 가진 항공기는 매우 가파른 자세를 향해 점진적으로 하강/상승하려는 경향이 있다. 따라서 세로 불안정성을 가진 항공기를 비행하는 것은 어려우며 때로는 위험하다.
항공기의 정적 세로 안정성/불안정성은 세 가지 요인에 의해 결정된다:
1. CG에 대한 날개의 위치.
2. CG에 대한 수평 꼬리 표면의 위치.
3. 꼬리 표면의 면적이나 크기.
정적 세로 안정성을 위해선 날개 모멘트와 꼬리 모멘트가 다음과 같은 관계를 가져야 한다: 모멘트들의 균형이 맞는 상태에서 기수가 갑자기 위로 향하였다면 기수가 다시 아래로 향할 수 있도록 날개 모멘트와 꼬리 모멘트가 변화해야 함. 마찬가지로 만약 항공기 기수가 아래로 향하였다면 기수가 다시 위로 향할 수 있도록 모멘트가 변화해야 한다.
대부분의 비대칭 에어포일에서 양력 중심(CL)은 받음각의 변화에 따라 앞/뒤로 이동하는 경향이 있다. 받음각이 증가하면 양력 중심이 앞으로 이동하는 경향을 보이며 반면 받음각이 감소하면 양력 중심이 뒤로 이동하는 경향을 보인다. 즉, 에어포일 받음각이 증가하면 양력 중심이 앞으로 이동해서 날개 앞전이 더 높아지려는 경향이 발생한다. 이러한 경향은 날개에 불안정성을 제공한다. (NOTE: 양력 중심은 CP [center of pressure]라고도 불림).
그림 5-23은 직진수평비행 상태인 항공기를 보여준다. CG-CL-T 선은 항공기의 세로축을 나타낸다.

대부분의 항공기 날개는 CL이 CG 뒤에 오도록 설계된다. 이는 항공기의 기수를 무겁게 만든다. 따라서 기수가 계속하여 아래로 떨어지는 것을 막기 위해 수평 안정판에 downward force가 가해져야 한다. 이를 위해 수평 안정판은 negative AOA로 설정된다. 이렇게 생성된 downward force가 꼬리를 아래로 가해서 균형이 잡힌다. CG-CL-T 선을 지렛대라 생각해보라. CL에서의 upward force, CG에서의 강한 downward force, 그리고 T에서의 약한 downward force가 서로 균형을 이룬다.
설령 수평 비행 도중 수평 안정판이 수평이 된다 해도 날개로부터의 downwash가 안정판의 윗부분을 타격해서 downward pressure가 만들어진다. 이 압력은 특정 속도에서 “지렛대”의 균형을 맞추기에 충분하다. 비행속도가 빠를수록 이러한 downwash가 커져서 수평 안정판의 downward force가 강해진다(단, T-tail 항공기는 그러지 아니함). [그림 5-24] 수평 안정판의 위치가 고정된 항공기의 경우 제조업체는 설계 순항 속도(design cruising speed)에서 최대의 안정성(혹은 균형)이 제공되도록 안정판 각도를 설정한다.
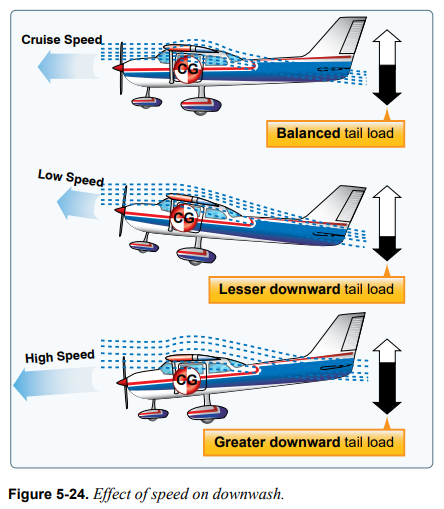
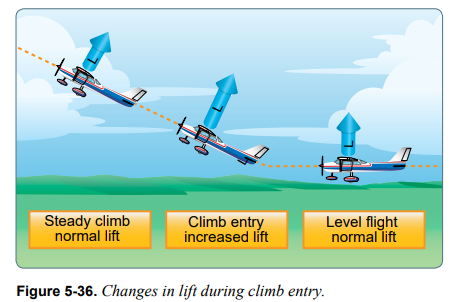
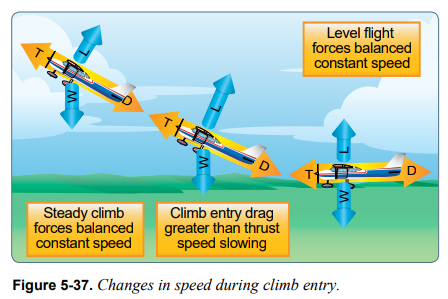
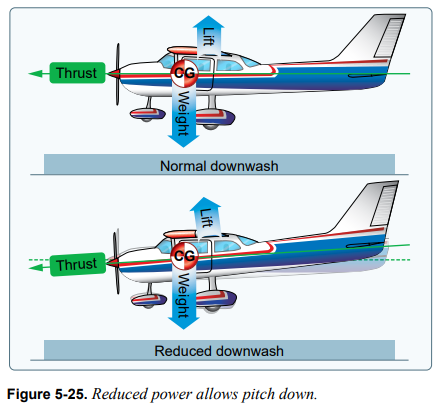
항공기의 속도가 감소하면 날개 위 공기 속도가 감소한다. 날개 위 공기 속도가 감소하면 downwash가 감소하는데 이로 인해 수평 안정판에 가해지는 downward force가 감소한다. [그림 5-25] 그 결과로 항공기의 기수가 낮아져서 날개의 받음각과 항력이 줄어들고 속도가 증가한다. 항공기가 계속 nose-low attitude로 비행하여 속도가 증가하면 수평 안정판의 downward force가 다시 증가한다. 이로 인해 꼬리가 다시 아래로 눌려서 기수가 상승 자세로 높아진다.
상승이 계속되면 속도가 다시 감소하며 꼬리의 downward force도 다시 감소한다(단, 기수가 다시 내려가기 전까지). 항공기는 동적으로 안정적이기 때문에 이번에는 기수가 첫 번째 만큼 낮아지지 않는다. 항공기는 서서히 하강해서 충분한 속도를 얻은 후에 다시 상승을 시작한다. 허나 이번 상승도 첫 번째 상승만큼 가파르지 않다.
이러한 몇 번의 감쇠 진동 후에 항공기는 결국 꼬리의 downward force가 항공기의 하강 경향을 정확하게 상쇄하는 속도에서 안정된다. 이러한 상태에 도달하면 항공기는 다시 균형 잡힌 비행을 수행하며 안정된 비행을 지속한다.
throttle을 닫을 때도 이와 유사한 영향이 발생한다. throttle을 닫으면 날개의 downwash가 감소하며 이로 인해 T지점의 힘은 수평 안정판을 아래로 유지하지 못한다. 허나 항공기는 증속한 후에 다시 적절한 균형을 잡으려 시도하므로 이는 바람직하다.
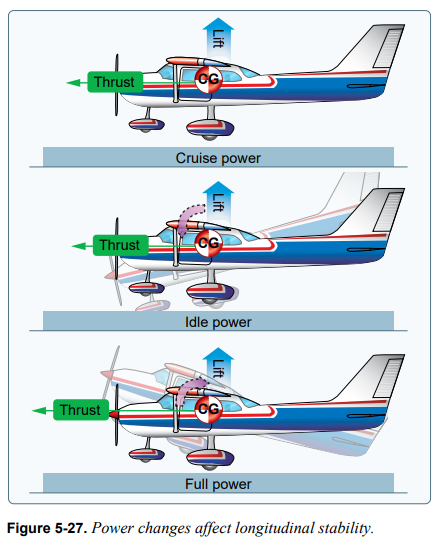
출력이나 추력 또한 불안정한 효과를 가질 수 있다. 왜냐하면 출력이 증가하면 기수가 상승하는 경향이 발생할 수 있기 때문이다. 항공기 설계자는 추력선을 CG 위에 설정하여("high thrust line"이라 불림) 이를 상쇄할 수 있다. [그림 5-26과 27] 이 경우 출력이나 추력이 증가할 때 꼬리에 가해지는 down load가 상쇄될 수 있는 모멘트가 발생한다. 반면 “low thrust line”은 수평 꼬리 표면의 nose-up 영향을 더해주는 경향이 있다. 결론: CG가 CL의 앞에 있고 공기역학적 tail-down force 가 있다면 항공기는 보통 안전한 비행 자세로 되돌아가려 한다.

다음은 세로 안정성을 증명하는 간단한 방법이다. 수평 비행 상태에서 손을 놓아도 될 정도로 항공기를 trim 한다. 그 다음 조종간을 살짝 눌러주어 항공기가 아래로 향하게 만든다. 만약 짧은 시간 내에 기수가 원래의 위치를 향해 상승한다면 항공기는 정적으로 안정적인 것이다. 보통 기수는 원래의 위치(수평 비행 자세)를 통과한 다음 일련의 느릿한 pitching oscillations를 만든다. 만약 진동이 점차 멈추면 항공기는 positive stability를 가지는 것이다. 만약 진동이 불균일하게 계속되면 항공기는 neutral stability를 가지는 것이다. 만약 진동이 증가하면 항공기는 불안정한 것이다.
Lateral Stability(Rolling)
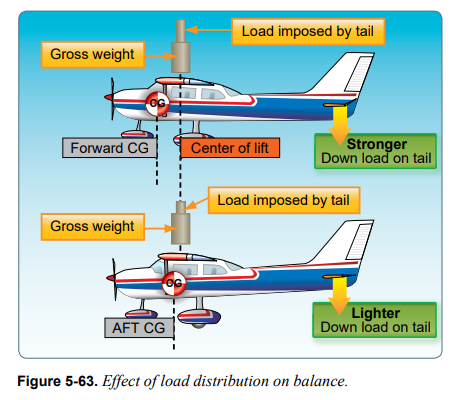
항공기의 세로축에 대한 안정성을 가로 안정성이라 부른다. positive lateral stability는 한쪽 날개가 반대쪽 날개보다 낮아졌을 때 “rolling effect”를 돕는다. 항공기를 가로로 안정적이게 만드는 네 가지 설계 요인이 있다: dihedral(상반각), sweepback(후퇴각), keel effect(용골 효과), 그리고 weight distribution(무게 분배).
Dihedral
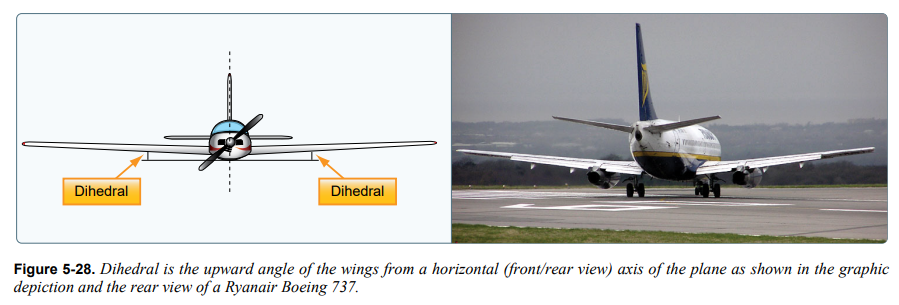
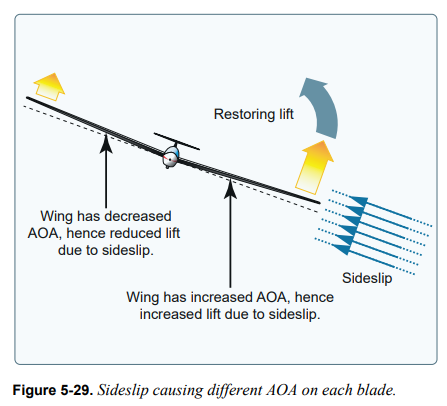
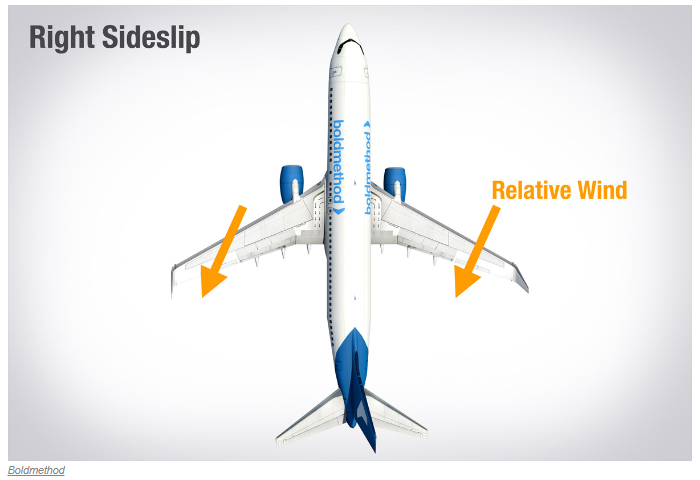
일부 항공기는 날개의 tip이 root보다 더 높게 설계된다. 이렇게 날개에 의해 형성된 각도를 상반각이다 부른다. [그림 5-28] 돌풍으로 인해 roll이 발생하면 sideslip이 발생한다. 이러한 sideslip은 상대풍을 slip 방향으로부터 오게 만든다. 이때 바람을 향하여 slip한 날개는 받음각이 증가해서 양력이 증가한다. 반면 풍하쪽 날개는 받음각이 감소해서 양력이 감소한다. 이러한 양력 변화는 풍상쪽 날개를 상승시키려는 rolling moment에 영향을 미친다. 따라서 sideslip이 발생하였을 때 상반각이 안정적 roll에 이바지한다. [그림 5-29]
Sweepback and Wing Location
날개 후퇴각과 날개 위치(예를 들어 저익기와 고익기)는 유효 상반각에 영향을 미칠 수 있는 주요 구성 요소들이다. 저익기의 경우 대략 10도의 후퇴각이 약 1도의 유효 상반각을 제공할 수 있다. 반면 고익기의 경우 대략 10도의 후퇴각이 약 5도의 유효 상반각을 제공할 수 있다.
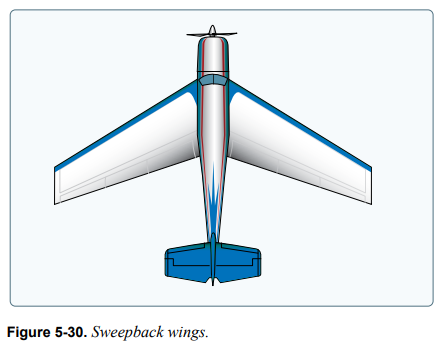
후퇴날개란 앞전이 뒤쪽으로 기울어진 날개를 의미한다. [그림 5-30] 이러한 항공기에서 slip이 발생하면 낮아진 날개의 앞전이 상대풍에 더 수직으로 놓인다. 이로 인해 낮아진 날개가 더 많은 양력을 생성해서 상승하며 항공기가 원래의 비행 자세로 회복된다.
Keel Effect and Weight Distribution
고익기의 경우 항상 세로축이 상대풍을 향하여 회전하려는 경향이 있다. 이를 종종 용골 효과라 부른다. 고익기가 가로로 안정적인 이유는 바로 날개가 동체의 높은 지점에 부착되어 있기 때문이다. 이러한 구조 때문에 동체는 용골처럼 작용하는데 이는 세로축을 중심으로 항공기에 안정적인 영향을 미친다. 고익기에서 slip이 발생하면 동체의 무게가 진자처럼 작용해서 항공기를 수평 자세로 되돌린다.
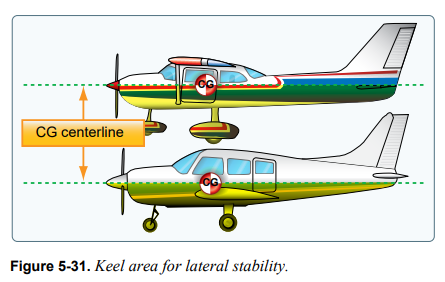
가로로 안정된 항공기의 용골 영역은 대부분 CG 위에 배치된다. [그림 5-31] 따라서 slip이 발생하면 항공기의 무게, 그리고 용골 영역 윗부분에 대한 기류의 압력이 항공기를 수평 자세로 되돌리려는 경향을 만든다.
Directional Stability(Yawing)
항공기의 수직축에 대한 안정성을 방향 안정성이라 부른다. 항공기를 설계하는데 있어 방향 안정성은 가장 쉽게 달성되는 안정성이다. vertical fin의 면적과 CG 뒷부분의 옆면적이 풍향계처럼 작용하며 이로 인해 기수가 상대풍 쪽으로 향한다.
만약 풍향계의 피벗점으로부터 앞뒤 표면에 정확히 같은 양의 바람이 발생하면 앞뒤에 가해지는 힘이 균형을 이루며 이로 인해 방향 이동이 일어나지 않는다. 따라서 피벗점의 앞쪽 면적보다 뒤쪽 면적이 더 커야한다.
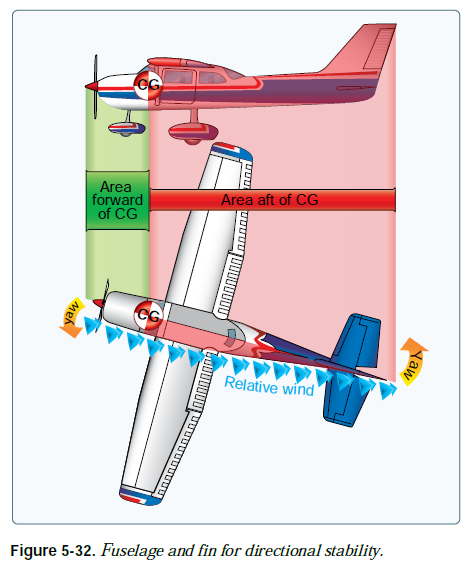
때문에 항공기 설계자는 CG 앞부분의 옆면적보다 CG 뒷부분의 옆면적을 더 크게 만들어서 positive directional stability를 보장해야 한다. [그림 5-32] 이로 인해 제공되는 안정성에 추가적인 positive stability를 제공하기 위해 vertical fin이 더해진다. vertical fin은 직진 비행을 유지하는데 있어 화살의 깃털과 비슷한 역할을 한다. vertical fin이 더 뒤에 배치될수록, 그리고 그 크기가 커질수록 항공기의 방향 안정성이 더 커진다.
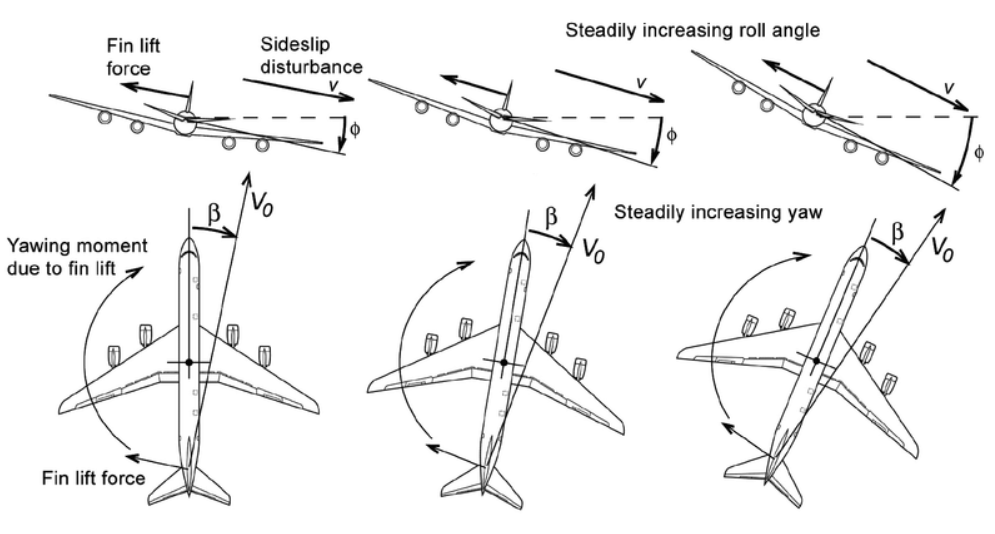
직진 비행 도중 돌풍으로 인해 항공기가 수직축을 중심으로 약간 회전하면(예를 들어 우측으로) 그 움직임이 fin에 의해 지연 및 정지된다. 왜냐하면 항공기가 우측으로 회전하는 동안 공기가 vertical fin의 좌측에 비스듬히 부딪히기 때문이다. 이로 인해 vertical fin의 왼쪽에 압력이 가해져서 회전 움직임이 저지되며 항공기의 yaw를 늦춘다. 이를 통해 항공기는 풍향계처럼 작용하며 상대풍을 향하여 회전한다. 비행경로의 초기 변화는 보통 heading이 변화한 후에 발생한다. 따라서 우측으로 약간 yawing한 후에 항공기가 초기 경로를 따라 이동하는 짧은 순간이 있다. 이때 항공기의 세로축은 약간 오른쪽을 가리킨다.
이때 항공기는 잠시 측면으로 skid를 하는데 그 순간 항공기가 다시 왼쪽으로 되돌아가려는 경향을 보인다. 즉, vertical fin으로 인해 일시적으로 회복되는 경향이 있다.
이러한 회복 경향은 비교적 느리게 이루어지며 항공기가 skid를 멈추었을 때 종료된다. 회복이 종료되면 항공기는 초기 방향과는 약간 다른 방향으로 비행한다. 즉, 항공기가 초기 heading을 향해 저절로 되돌아가지는 않을 것이다. 때문에 조종사가 초기 heading을 다시 설정해야 한다.
후퇴각을 통해 방향 안정성이 약간 개선될 수 있다. 후퇴각은 주로 고속 비행 도중 압축성이 시작되는 것을 지연시키기 위해 설계된다. 가볍고 느린 항공기의 경우 후퇴각은 압력 중심이 CG에 대해 올바른 지점에 위치하도록 돕는다. 세로로 안정된 항공기의 압력 중심은 CG 뒤에 놓이도록 설계된다.
구조적 이유로 인해 항공기 설계자들은 때때로 날개를 정확히 원하는 지점에 부착할 수 없다. 만약 날개가 앞 쪽 멀리에 동체로부터 수직로 설치되어야 한다면 압력 중심의 위치로 인해 세로 안정성이 떨어진다. 그러나 설계자들은 후퇴각을 통해 압력 중심을 뒤로 이동시킬 수 있다. 후퇴각의 양과 날개의 위치가 압력 중심을 정확한 위치에 배치시킬 것이다.
난기류로 인해 항공기가 한쪽으로 yaw 하면 반대쪽 날개의 앞전 면적이 상대풍에 더 수직으로 놓인다. 전방에 놓인 날개의 대기속도가 증가하여 후방에 놓인 날개보다 더 많은 항력을 얻는다. 전방에 놓인 날개의 추가 항력은 날개를 뒤로 당겨서 항공기를 초기 경로로 되돌린다.

날개가 제공하는 정적 방향 안정성의 양은 보통 작다. 후퇴각도 그 양에 따라 안정성을 제공하긴 하지만 다른 구성 요소들과 비교하였을 때 그 기여도가 비교적 작다.
Free Directional Oscillations(Dutch Roll)
dutch roll은 lateral/directional oscillation이 결합된 것이다. 이는 보통 동적으로 안정적이지만 진동 특성 때문에 안전하지는 않다. 진동의 감쇠는 항공기 특성에 따라 강하거나 약할 수 있다.
난기류로 인해 항공기의 오른쪽 날개가 아래로 밀리면 기수가 상대풍과 정렬되기 전에 positive sideslip angle이 날개를 가로로 수정한다. 날개가 위치를 수정하는 동안 lateral/directional oscillation이 발생할 수 있으며 이로 인해 두 번의 진동(roll과 yaw)이 항공기의 기수로 하여금 숫자 8을 그리게 만든다. 이 진동들의 크기는 거의 비슷하지만 그 위상은 서로 다르다.
고속 후퇴익 설계를 제외한 대부분의 최신 항공기에서는 Dutch roll이 몇 주기 이내에 자동으로 사라진다(단, 돌풍이나 난기류가 계속되는 경우 제외). 계속하여 Dutch roll를 수행하는 경향을 가진 항공기에는 보통 gyro-stabilized yaw dampers가 장착된다. 제조업체는 강한 방향 안정성과 적은 방향 안정성의 중간을 찾으려 노력한다. 항공기는 Dutch roll 경향보다 “spiral instability” 경향을 갖는 것이 더 바람직하기 때문에 대부분의 항공기는 이러한 특징으로 설계된다.
Spiral Instability
항공기의 정적 방향 안정성이 상반각의 영향에 비해 매우 강하면 spiral instability가 존재한다. 돌풍이나 sideslip에 의해 항공기의 가로 평형이 방해되면 강한 방향 안정성으로 인해 기수가 상대풍으로 yaw 하려는 경향을 보인다. 허나 상대적으로 약한 상반각은 가로 균형을 회복하는데 뒤처진다. 이러한 yaw로 인해 회전 모멘트의 바깥에 있는 날개는 안쪽 날개보다 더 빠르게 앞으로 이동하며 그 결과로 양력이 더 커진다. 이는 overbanking tendency를 생산하며 만약 수정되지 않으면 bank angle이 점점 더 깊어진다. 이때 항공기를 상대풍과 정렬시키려는 강한 방향 안정성으로 인해 기수가 더 낮은 자세를 취한다. 천천히 아래로 향하는 spiral을 대처하지 못하면 점점 spiral dive가 깊어진다. spiral이 발산하는 속도는 매우 점진적이므로 조종사가 어려움 없이 제어할 수 있다.
많은 항공기들이 이 특성의 영향을 어느 정도 받긴 하지만 이는 다른 매개변수들에 비해 안정적일 수 있다. 이러한 경향 때문에 무한정 손을 놓고 항공기를 비행할 수는 없다.
이러한 불안정성을 수정하거나 제거하기 위한 조종 장치(wing leveler)가 연구되고 있다. 조종사는 spiral이 많이 발달된 후에 회복을 적용할 때 주의해야 한다. 왜냐하면 구조에 과도한 하중이 가해질 수 있기 때문이다. spiral instability의 부적절한 회복으로 인해 많은 사망자가 발생해왔다. spiral이 발생하였을 때 감속을 위해 back elevator force를 가하면 선회반경이 좁아지고 load factor가 커진다. spiral이 장시간 회복되지 못하면 구조적 파괴나 지면 충돌이 발생한다. 수평 참조선이 사라지거나, 계기로 항공기를 제어할 수 없거나, 혹은 이들이 조합되면 이러한 상황이 발생할 수 있다.
'PHAK(2023) > 5: Aerodynamics of Flight' 카테고리의 다른 글
| (4) Axes of an Aircraft (0) | 2023.05.06 |
|---|---|
| (5) Moment and Moment Arm (0) | 2023.05.06 |
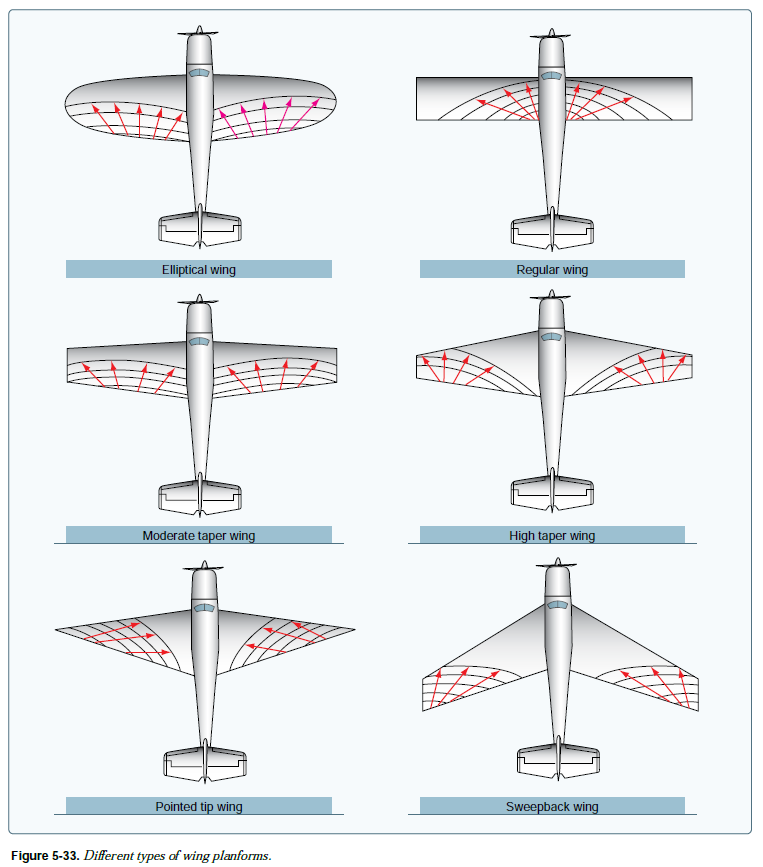
| (7) Effect of Wing Planform (0) | 2023.05.06 |
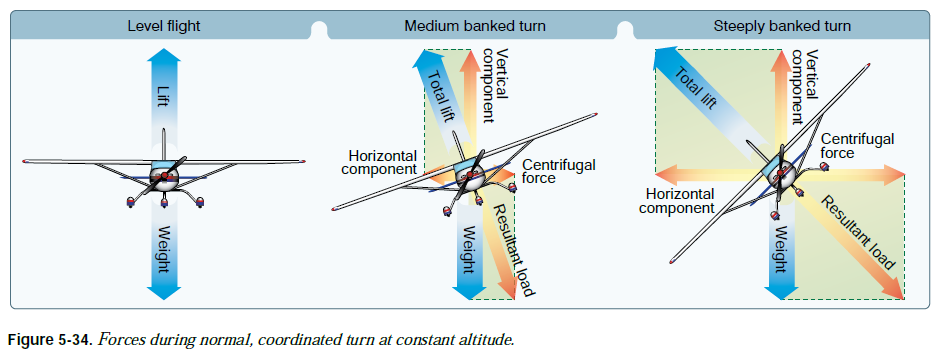
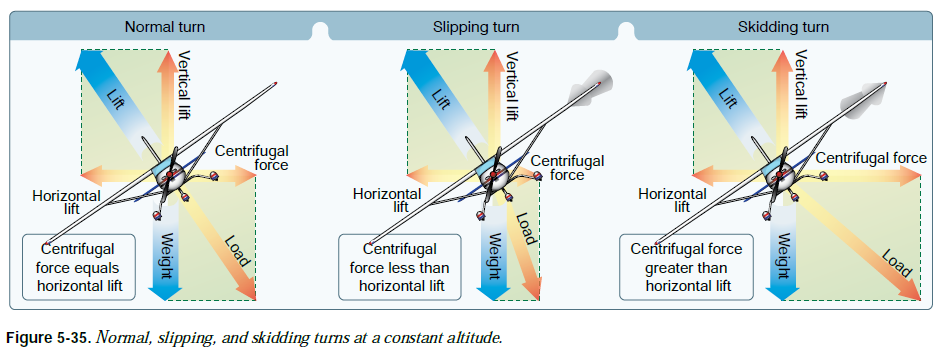
| (8) Aerodynamic Forces in Flight Maneuvers (0) | 2023.05.06 |
| (9) Stalls (0) | 2023.05.06 |