Basic Propeller Principles
항공기 프로펠러는 두 개 이상의 blade와 central hub(여기에 블레이드가 부착됨)로 구성된다. 항공기 프로펠러의 각 블레이드는 본질적으로 회전하는 날개이다. 그 구조 덕분에 프로펠러 블레이드는 마치 에어포일처럼 작용하여 힘을 생산한다. 이 힘은 추력을 생성하여 공기 중의 항공기를 당기거나 밀어낸다. 엔진은 프로펠러 블레이드를 고속으로 회전시키는데 필요한 동력을 제공하고 프로펠러는 엔진의 회전력을 추력으로 변환한다.
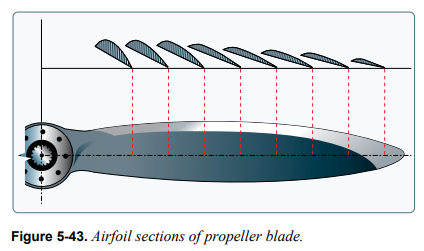
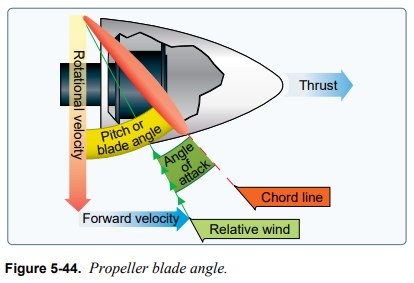
일반적인 프로펠러 블레이드의 단면이 그림 5-43에 나타나 있다. 이러한 단면은 항공기 날개의 단면과 유사하다. 블레이드의 한쪽 면은 항공기 날개의 윗면처럼 캠버를 가지고 있으며 반대쪽 면은 날개의 아랫면처럼 평평하다. 시위선은 블레이드의 앞전에서 뒷전으로 그려지는 가상의 선이다. 앞전은 프로펠러 회전 시 공기와 만나는 두꺼운 가장자리이다. 블레이드 각도는 블레이드의 시위선과 블레이드 회전 평면 사이의 각도를 의미하며 이는 보통 도(°)로 측정된다. 블레이드 각도는 블레이드의 특정 지점으로부터 측정된다. [그림 5-44] 대부분의 프로펠러가 평평한 blade “face”를 가지기 때문에 이 부분을 따라 시위선이 그려지는 경우가 많다. pitch와 blade angle은 서로 다른 것이지만 pitch가 주로 blade angle에 의해 결정되기 때문에 두 용어가 종종 같은 의미로 사용된다. 하나의 증가/감소는 보통 다른 하나의 증가/감소와 관련된다. 프로펠러의 pitch는 인치 단위로 지정될 수 있다. 예를 들어 “74-48”로 지정된 프로펠러의 경우 길이는 74인치이고 effective pitch는 48인치이다. pitch란 프로펠러가 한 바퀴 회전할 때 공기 중에서 이동하는 거리(인치 단위)를 의미한다(단, slippage가 없는 경우).
새로운 형식의 항공기에 fixed-pitch propeller를 지정할 때 제조업체는 보통 항공기의 순항 속도에서 효율적으로 작동하는 pitch를 선택한다. fixed-pitch propeller는 특정 대기속도와 rpm 조합에서만 효율적일 수 있으므로 모든 fixed-pitch propeller는 타협점이 필요하다. 조종사는 비행 도중 이 조합을 변경할 수 없다.
항공기 엔진이 작동하는 상태에서 지상에 정지해 있을 때, 혹은 이륙 초기에 천천히 움직이고 있을 때 프로펠러 효율은 매우 낮다. 왜냐하면 fixed-pitch blades가 최대 효율에 도달할 수 있는 속도로 전진하고 있지 않기 때문이다. 이때 프로펠러 블레이드는 출력의 양에 비해 상대적으로 적은 추력이 발생하는 받음각으로 회전한다.
프로펠러의 작용을 이해하려면 먼저 프로펠러의 움직임을 고려해야 한다. 그림 5-44을 보면 프로펠러 블레이드의 각 단면이 아래로(rotational velocity), 그리고 앞으로(forward velocity) 이동한다. 이러한 공기(상대풍)가 프로펠러 블레이드에 부딪히는 각도가 블레이드의 받음각이다. 이 각도에 의해 생성되는 공기의 편향이 프로펠러 블레이드의 엔진쪽 동압을 대기압보다 커지게 만들며 그 결과 추력이 형성된다.
블레이드의 모양도 추력을 생성한다. 왜냐하면 이는 날개의 에어포일 모양처럼 캠버를 가지기 때문이다. 공기가 프로펠러를 통과하여 흐를 때 한쪽 압력은 반대쪽 압력보다 작다. 날개와 마찬가지로 압력이 작은 방향을 향해 반작용이 형성된다. 날개 위의 공기 흐름은 압력이 작으므로 힘(양력)이 위로 향한다. 프로펠러는 수직면에 장착되므로 압력이 작은 영역이 프로펠러의 앞에 존재하며 그 결과로 힘(추력)이 전방으로 향한다. 공기역학적으로 추력은 프로펠러 모양과 블레이드 받음각의 결과이다.
추력은 프로펠러가 다루는 공기의 질량 측면에서도 고려될 수 있다. 여기에서 추력은 [다루어지는 공기 질량 x (후류 속도 - 항공기 속도)]와 같다. 추력을 생성하는데 소비되는 출력은 공기 덩어리가 움직이는 속도에 따라 달라진다. 추력은 평균적으로 토크(프로펠러가 흡수하는 총 마력)의 약 80%을 차지한다. 나머지 20%는 마찰과 slippage로 인해 손실된다. 어떠한 프로펠러 회전 속도에서도 프로펠러가 흡수하는 마력은 엔진이 전달하는 마력과 균형을 이룬다. 프로펠러가 한 번 회전할 때 다루는 공기의 양은 블레이드 각에 따라 달라지며 이는 프로펠러가 얼마나 많은 양의 공기를 “bite” 할지 결정한다. 따라서 블레이드 각은 프로펠러에 가해지는 부하를 조정함으로써 엔진 rpm을 제어하는 훌륭한 수단이다.
블레이드 각은 프로펠러의 받음각을 조정하는 좋은 수단이기도 하다. constant-speed propeller의 경우 블레이드 각은 모든 엔진/항공기 속도에 대해 가장 효율적인 받음각을 제공하도록 조정되어야 한다. 프로펠러의 양력 대 항력 곡선을 보면 가장 효율적인 받음각이 +2 ~ +4도로 작다. 이러한 작은 받음각을 유지하는데 필요한 블레이드 각은 항공기의 전진 속도에 따라 달라진다.
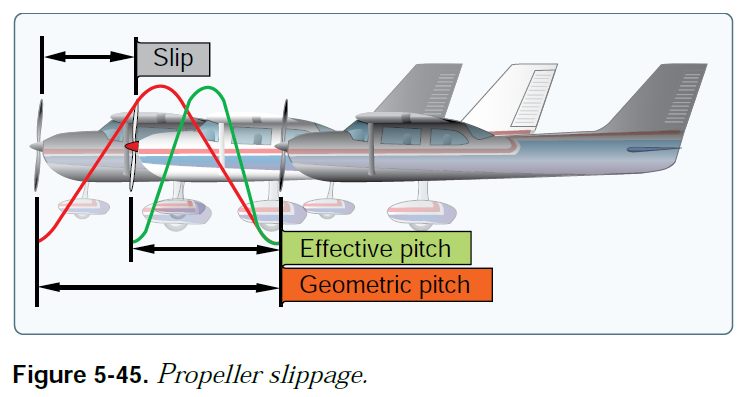
fixed-pitch propeller와 ground-adjustable propeller는 특정 프로펠러 회전 속도 및 항공기 전진 속도에서 가장 효율적이도록 설계되었다. 이들은 특정 항공기/엔진 조합에 대해 설계된다. 이륙, 상승, 순항, 혹은 고속 비행을 위한 최대 효율을 제공하는 프로펠러가 사용될 수 있다. 이러한 조건으로부터 벗어나면 프로펠러와 엔진의 효율이 저하된다. 기계의 효율성은 실제 출력 입력량에 대한 유효 출력 생산량의 비율을 의미하므로 프로펠러의 효율성은 제동마력(brake horsepower)에 대한 추력 마력(thrust horsepower)의 비율을 의미한다. 프로펠러 효율성은 “slips”의 정도에 따라 50 ~ 87%까지 변화한다. slip이란 프로펠러의 geometric pitch과 effective pitch의 차이를 의미한다. [그림 5-45] geometric pitch는 프로펠러가 한 번 회전할 때 전진해야 하는 이론적 거리이고 effective pitch는 실제로 전진한 거리이다. 따라서 geometric(이론상) pitch는 slippage가 없다는 것을 기초로 하지만 effective(실제) pitch는 공중에서의 slippage를 포함한다.
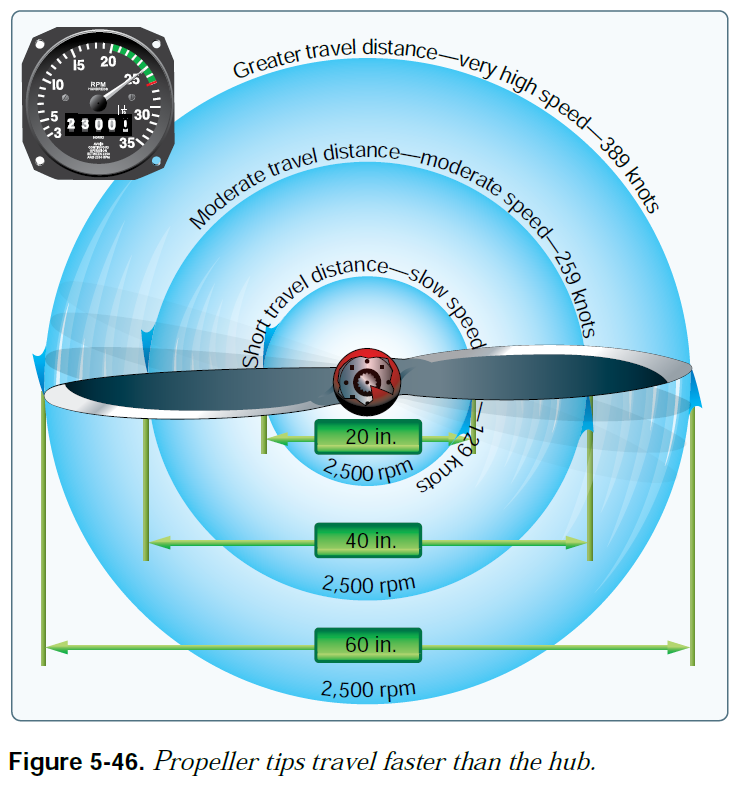
프로펠러는 뒤틀려 있다. 왜냐하면 프로펠러 블레이드의 바깥 부분이 중앙 근처보다 더 빠르게 이동하기 때문이다. [그림 5-46] 만약 블레이드가 전체 길이에 걸쳐 동일한 geometric pitch를 갖게 되면 순항 도중 중앙 근처의 블레이드가 음의 받음각을 받는 반면 바깥 부분의 블레이드는 실속에 빠질 것이다. 블레이드의 geometric pitch에 변화를 주면 순항 도중 프로펠러가 그 길이를 따라 비교적 일정한 받음각으로 작동할 수 있다. 프로펠러 블레이드는 프로펠러 길이에 따른 회전 속도 차이에 비례하여 각도가 변화하도록 뒤틀려 있다. 이를 통해 프로펠러 길이를 따라 추력이 균일하게 유지된다.
보통 1 ~ 4도가 가장 효율적인 양항비를 제공한다. 허나 fixed-pitch propeller의 프로펠러 받음각은 보통 0 ~ 15도까지 변화한다. 이러한 변화는 상대풍의 변화에 의해, 즉 항공기 속도의 변화에 의해 발생한다. 따라서 프로펠러 받음각은 두 가지 움직임을 통해 결정된다: 프로펠러의 회전 속도와 항공기의 전진 속도.
constant-speed propeller는 비행 도중 마주하는 대부분의 조건에 대해 최대 효율이 발생하도록 블레이드 각을 자동으로 조정한다. 이륙 도중(최대 출력 및 추력이 필요할 때) constant-speed propeller는 낮은 블레이드 각도 상태에 놓인다. 낮은 블레이드 각은 상대풍에 대한 받음각을 작고 효율적이게 유지한다. 동시에 이는 프로펠러 회전 시 적은 양의 공기가 다뤄지도록 한다. 이러한 낮은 부하를 통해 엔진은 높은 rpm으로 회전하며 특정 시간 내에 최대 연료량을 열에너지로 변환한다. 비록 high rpm일 때 프로펠러가 다루는 공기의 질량은 적긴 하지만 최대 추력이 발생한다. 왜냐하면 항공기 전진 속도는 낮고 후류 속도는 빠르기 때문이다.
이륙 후에 constant-speed propeller는 항공기 속도가 증가함에 따라 자동으로 높은 각도로 변경된다. 높은 블레이드 각은 상대풍에 대한 받음각을 계속 작고 효율적이게 유지한다.
상승이 시작되었다면 먼저 manifold pressure를 낮춰서 엔진의 출력 생산량을 상승 출력으로 만든다. 그런 다음에는 블레이드 각을 증가시켜서 rpm을 낮춘다. 블레이드 각도가 높아지면 프로펠러 회전 당 처리되는 공기의 질량이 증가한다. 이는 엔진 rpm을 감소시키고, 연료 소모량과 엔진 마모를 줄이며, 추력을 최대로 유지한다.
순항 고도에서 항공기가 수평비행 중이며 이륙이나 상승보다 적은 양의 출력이 필요하다면 다시 manifold pressure를 낮춰서 엔진 출력을 감소시키고 rpm을 감소시키기 위해 블레이드 각을 증가시킨다. 이는 감소된 엔진 출력에 맞는 토크 조건을 제공한다. 후류 속도가 감소하고 대기속도가 증가하였지만 회전 당 다루어지는 공기량이 더 커져서 프로펠러 효율이 더 개선된다. 항공기 대기속도가 증가함에 따라 블레이드 각도가 증가하였기 때문에 받음각은 여전히 작다.
Torque and P-factor
좌선회 경향은 네 가지 요소로 구성되며 이들은 세 개의 축들 중 적어도 하나를 중심으로 비행기를 회전시킨다. 네 가지 요소는 다음과 같다:
1. 엔진과 프로펠러의 토크 반작용.
2. 프로펠러 후류의 corkscrewing effect.
3. 프로펠러의 자이로 작용.
4. 프로펠러의 비대칭 부하(= P-factor).
Torque Reaction
토크 반작용은 뉴턴의 제 3법칙(모든 작용에는 이와 동등한, 그리고 이에 반대되는 반작용이 있다)과 관련이 있다. 즉, 내부 엔진 부품들과 프로펠러가 한쪽 방향으로 회전하므로 이와 동일한 힘이 항공기를 반대 방향으로 회전시키려 한다는 것을 의미한다. [그림 5-47]

항공기가 공중에 있을 때 이러한 힘은 세로축을 중심으로 작용하여 항공기를 roll 시키려는 경향이 있다. 일부 옛날 항공기는 이러한 roll 경향을 보상하기 위해 아래로 roll 하는 날개에서 더 많은 양력이 생성되도록 설계되었다. 보다 현대적인 항공기에서는 이러한 토크 영향을 상쇄하기 위해 엔진이 어긋나게 설계된다.
NOTE: 미국에서 제작된 대부분의 항공기 엔진은 프로펠러를 시계방향으로 회전시킨다(조종사 좌석에서 보았을 때). 여기서는 이러한 엔진과 관련된 것을 설명한다.
항공기 운영 시간의 대부분은 보통 순항 속도에서 이루어진다. 따라서 보정 요소들은 순항 속도에서의 토크가 보상되도록 영구 설정된다. 허나 aileron trim tabs를 사용하면 순항 속도 이외의 속도에서도 토크가 보상될 수 있다. 이륙 활주 도중 항공기의 바퀴가 지면에 있을 때에는 토크 반작용으로 인해 수직 축을 중심으로 선회 모멘트가 발생한다. 토크 반작용으로 인해 항공기의 좌측이 아래로 밀리면서 left main landing gear에 더 많은 무게가 가해진다. 이로 인해 우측 타이어보다 좌측 타이어의 지면 마찰이 더 커져서 좌측으로 선회 모멘트를 만들어낸다. 이러한 모멘트의 크기는 다양한 변수들에 의해 달라진다. 이러한 변수들 중 일부는 다음과 같다:
1. 엔진의 크기와 마력.
2. 프로펠러의 크기와 rpm.
3. 항공기의 크기.
4. 지면의 상태.
이륙 활주 도중 발생하는 yawing moment는 rudder나 rudder trim을 통해 수정된다.
Corkscrew Effect
빠르게 회전하는 항공기 프로펠러는 후류(slipstream)를 나선형으로 회전하게 만든다. 프로펠러 속도는 높고 항공기 전진 속도는 낮다면(예를 들어 이륙 도중) 이러한 나선형 회전이 매우 촘촘해진다. 이는 항공기의 수직 꼬리 표면에 강한 측면 힘을 가한다. [그림 5-48]
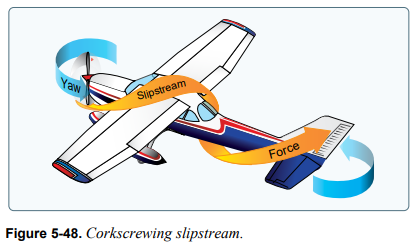
나선 후류가 vertical fin에 부딪히면 이는 항공기의 수직축을 중심으로 yawing moment를 발생시킨다. 나선 후류가 더 촘촘해질수록 그 힘은 더 커진다. 허나 항공기 전진 속도가 증가하면 나선 후류가 길게 늘어져서 모멘트가 작아진다. 또한 나선 후류는 세로축을 중심으로 rolling moment도 발생시킨다.
나선 후류로 인한 rolling moment는 우측으로 발생한다. 반면 토크 반작용으로 인한 rolling moment는 좌측으로 발생한다. 즉, 하나가 다른 하나를 상쇄할 수 있다. 그러나 이러한 힘들은 크게 변화하기 때문에 조종사는 항상 조종간을 통해 적절한 수정 조치를 취해야 한다.
Gyroscopic Action
프로펠러의 자이로 영향을 이해하기 전에 먼저 자이로스코프의 기본 원리를 이해해야 한다. 자이로스코프는 두 가지 기본 특성을 가지고 있다: 공간 강성과 세차. 이 논의에서 사용되는 기본 특성은 세차이다.
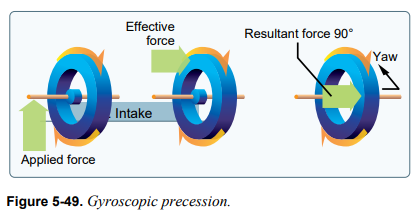
세차란 회전 중인 로터의 가장자리에 편향력이 가해졌을 때 발생하는 작용이다. 그림 5-49를 보면 힘이 가해졌을 때 그 결과적으로 발생하는 힘이 회전 방향의 전방 90도에서 나타난다. 비행기의 프로펠러는 자이로스코프를 만들어내므로 이와 유사한 특성을 가진다. 프로펠러를 회전 평면 바깥으로 편향시키기 위한 힘이 작용될 때마다 그 결과적으로 발생하는 힘이 회전 방향의 전방 90도에서 나타난다. 이는 힘이 작용한 지점에 따라 pitching moment나 yawing moment를, 혹은 pitching moment와 yawing moment 모두를 발생시킨다.
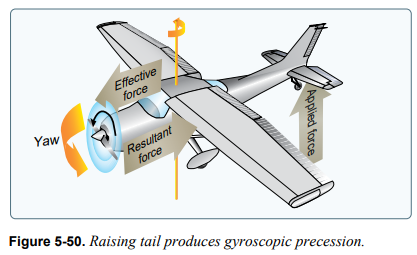
세차는 항상 tailwheel-type aircraft에서 더 두드러지게 나타나며 특히 이륙 활주 도중 꼬리를 들 때 가장 자주 발생한다. [그림 5-50] 이러한 pitch 자세 변화는 프로펠러 회전면의 상단에 힘을 가하는 것과 같은 효과를 만든다. 전방 90도에서 작용하는 힘은 수직축을 중심으로 좌측을 향해 yawing moment를 발생시킨다. 이러한 모멘트의 크기는 몇 가지 변수들에 따라 달라지는데 그중 하나는 꼬리를 들 때 적용된 힘의 양이다. 허나 세차는 프로펠러 회전면 가장자리의 어떤 지점에 힘이 가해졌을 때 발생하며 그 결과적인 힘은 여전히 회전 방향의 전방 90도에서 나타난다. 힘이 적용되는 위치에 따라 비행기는 좌우로 yaw 하거나, 위아래로 pitch 하거나, 혹은 pitching/yawing이 모두 발생한다.
세차로 인하여 수직축을 중심으로 발생한 모든 yawing은 pitching moment를 만들고 가로축을 중심으로 발생한 모든 pitching은 yawing moment를 만들어낸다 할 수 있다. 세차로 인하여 만들어진 pitching/yawing moment를 막기 위해 조종사는 elevator/rudder를 적절히 사용해야 한다.
Asymmetric Loading(P-Factor)
항공기가 높은 받음각으로 비행할 경우 아래로 움직이는 블레이드의 “bite”가 위로 움직이는 블레이드의 “bite”보다 크다. 이는 추력 중심을 프로펠러 회전 영역의 우측으로 이동시키며 그 결과 수직축을 중심으로 왼쪽을 향해 yawing moment를 발생시킨다. 이것을 증명하는 것은 복잡하다. 왜냐하면 항공기의 받음각과 각 프로펠러 블레이드의 받음각을 모두 고려하면서 각 프로펠러 블레이드에 대한 바람 벡터 문제를 해결해야하기 때문이다.
이러한 비대칭 부하는 합성 속도에 의해 발생한다. 합성 속도는 회전면에서의 프로펠러 블레이드 속도와 프로펠러 회전 영역을 수평으로 통과하는 공기 속도가 합쳐져서 형성된다. 항공기가 양의 받음각으로 비행하면 아래로 움직이는 블레이드의 합성 속도 영역이 위로 움직이는 블레이드의 합성 속도 영역보다 커진다. 프로펠러 블레이드는 에어포일이기 때문에 속도가 증가하면 양력이 증가한다. 아래로 움직이는 블레이드는 더 많은 양력을 발생시켜서 항공기 기수를 좌측으로 당기는(yaw) 경향을 만든다.
항공기가 높은 받음각으로 비행하면 아래로 움직이는 블레이드가 더 높은 합성 속도를 가지므로 위로 움직이는 블레이드보다 더 많은 양력을 생산한다. [그림 5-51] 이는 프로펠러 축이 지면으로부터 수직으로 장착되었다 생각하면(마치 헬리콥터처럼) 더 쉽게 이해될 수 있다. 만약 공기 움직임이 전혀 없다면(단, 프로펠러가 생산하는 공기 움직임은 제외) 각 블레이드의 단면들은 동일한 속도를 가질 것이다. 허나 만약 해당 프로펠러를 가로지르는 공기 움직임이 존재한다면 공기 흐름을 향해 전진하는 블레이드가 공기 흐름으로부터 멀어지는 블레이드보다 더 높은 대기 속도를 가진다. 따라서 수평 공기 흐름을 향해 전진하는 블레이드가 더 많은 양력을 형성한다. 이는 추력 중심을 해당 블레이드쪽으로 이동시킨다. 이제는 수직으로 장착된 프로펠러 축이 공기 흐름에 대해 더 얕은 각도로 회전하고 있다 생각해보자. 이러한 비대칭 추력은 프로펠러 축이 공기 흐름에 대해 정확히 수평이 되기 전까지 계속 비례적으로 작아진다.

이 네 가지 요소의 영향들은 비행 상황에 따라 달라진다. 특정 비행 구간에서는 이러한 요소들 중 하나가 다른 요소들보다 더 두드러질 수 있으며 그 외의 비행 구간에서는 다른 요소들이 더 두드러질 수 있다. 이러한 값들의 관계는 동체, 엔진, 그리고 프로펠러의 조합에 따라 달라지며 그 외 설계 특징 또한 영향을 미친다. 어떠한 비행 조건에든 항공기를 확실하게 제어하려면 이러한 값들이 보상되도록 조종간을 적용해야 한다.
'PHAK(2023) > 5: Aerodynamics of Flight' 카테고리의 다른 글
| (9) Stalls (0) | 2023.05.06 |
|---|---|
| (10) Angle of Attack Indicators (0) | 2023.05.06 |
| (12) Load Factors (0) | 2023.05.06 |
| (13) Weight and Balance (0) | 2023.05.06 |
| (14) High Speed Flight (0) | 2023.05.06 |