Gyroscopic Systems
자이로스코프의 두 가지 특성(공간 강성, 그리고 세차)을 사용한 자이로스코프 장비를 사용할 경우 자연 수평선을 참조하지 않고도 비행을 안전하게 수행할 수 있다. 이러한 시스템은 attitude, heading, 그리고 rate instruments를 포함한다. 이러한 계기들은 자이로스코프(혹은 자이로)를 가지고 있다. 이는 작은 바퀴로 그 무게가 주변에 집중된다. 이 바퀴가 빠른 속도로 회전하면 공간 강성이 발생하여 회전축으로부터 다른 방향으로 기울어지는 것에 저항한다.
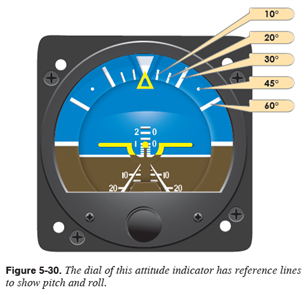
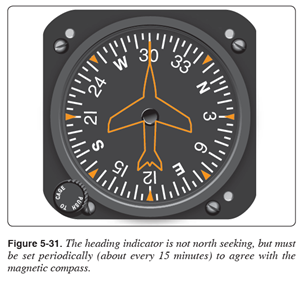
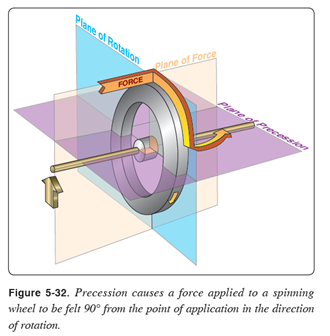
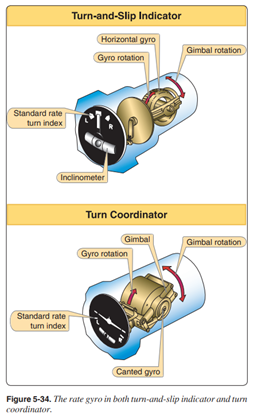
attitude와 heading instruments는 공간 강성의 원리로 작동한다. 이러한 계기의 경우 자이로는 계기 케이스 내부에서 공간 강성을 유지하며 항공기는 이를 주위로 회전한다. rate indicators(예를 들어 turn indicators, 그리고 turn coordinators)는 세차의 원리로 작동한다. 이 경우 항공기가 하나 이상의 축을 회전하는 속도에 비례하여 자이로가 전진한다.
Power Sources
항공기 및 계기 제조업체는 비행 계기들을 이중화 하였다. 이는 하나의 고장으로 인하여 안전하게 비행을 수행할 수 있는 능력을 빼앗지 않기 위함이다. 자이로스코프 계기는 계기 비행에 있어 매우 중요하다. 따라서 이 계기들은 별도의 전기, 혹은 공압 전원으로 구동된다.
Pneumatic Systems
공압식 자이로는 바퀴 주변에 부딪히는 공기에 의해 구동된다. 이러한 공기 흐름은 vacuum source를 통해 계기 케이스를 비워낸 다음 여과된 공기가 노즐을 통해 케이스로 들어옴으로써 얻어진다.
Venturi Tube Systems
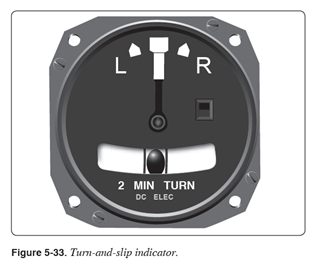
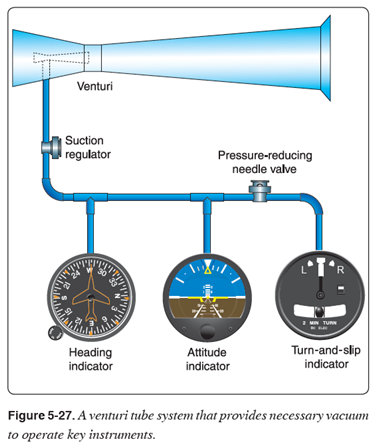
계기 케이스를 비워내기 위한 공압 펌프가 없는 항공기는 항공기 외부에 장착된 벤투리관을 사용할 수 있다. [그림 5-27] 벤투리관을 통해 흐르는 공기는 가장 좁은 부분에서 속도가 빨라지고 압력이 떨어진다(베르누이의 원리). 이 위치는 하나의 관을 통해 계기 케이스에 연결된다. attitude indicator와 heading indicator는 대략 4˝Hg의 흡입력으로 작동한다. 반면 turn-and-slip indicator는 2˝Hg만을 필요로 하므로 흡입력을 줄이기 위해 pressure-reducing needle valve가 사용된다. 계기 케이스에 내장된 필터를 거쳐 공기가 유입된다. 이러한 시스템에서는 얼음이 벤투리관을 막아 계기를 멈추게 만들 수 있다.
Vacuum Pump Systems
Wet-Type Vacuum Pump
계기 케이스를 비우기 위해 steel-vane air pumps가 수년간 사용되어왔다. 이러한 펌프의 관들은 소량의 엔진 오일에 의해 윤활 되며 공기와 함께 배출된다. 일부 항공기에서는 배출된 공기로 날개, 그리고 미익 앞전(empennage leading edges)의 rubber deicer boots를 팽창하기 위해 사용된다. 오일이 rubber boots를 악화시키지 않도록 하려면 oil separator를 통해 오일을 제어해야 한다. [그림 5-28]
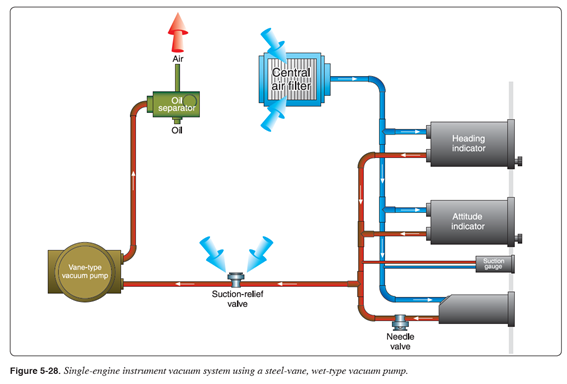
vaccum pump는 흡입력이 요구되는 계기들에 필요한 것보다 더 많은 양의 공기를 이동시키므로 suction-relief valve가 펌프의 입구 쪽에 설치된다. 스프링을 장착한 이 밸브는 계기 내부에 필요한 저압을 유지하기에 충분할 정도로 공기를 빨아들인다. 이는 계기판의 suction gauge에 표시된다. central air filter로부터 여과된 공기가 계기 케이스에 유입된다. 항공기가 상대적으로 낮은 고도로 비행하는 도중에는 자이로를 빠른 속도로 회전시킬 수 있는 충분한 공기가 계기 케이스로 유입된다.
Dry Air Vacuum Pump
비행 고도가 증가함에 따라 공기의 밀도는 낮아지므로 더 많은 공기가 계기를 통과하도록 만들어야 한다. 높은 고도를 비행하는 항공기는 배출 공기와 오일을 섞지 않는 air pump를 사용한다. steel housing 내부의 steel vanes는 윤활이 필요하다. 그러나 carbon housing 내부의 특수한 carbon vane은 마모됨에 따라 미세한 양의 자체 윤활을 제공한다.
Pressure Indicating Systems
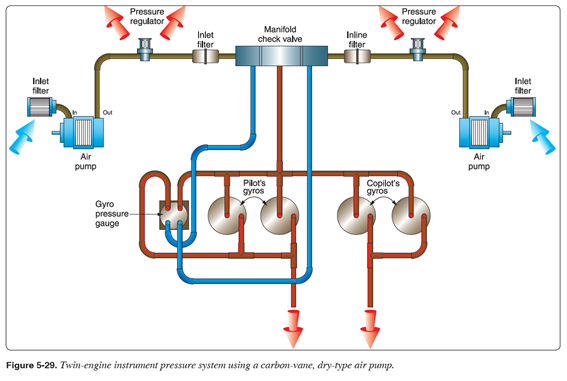
그림 5-29는 twin-engine general aviation airplane의 공압 시스템 계기를 나타낸다. 두 개의 dry air pumps 입구에 필터를 장착하여 오염물을 걸러낸다. 이는 펌프 내의 carbon vanes 손상을 막기 위함이다. 펌프의 배출 공기는 regulator를 통과한다. regulator는 시스템 내 압력을 원하는 수준으로 유지하기 위해 과도한 공기를 빼낸다. 이렇게 조절된 공기는 inline filters를 통과한다. 펌프로부터 유입될 수 있는 오염 물질이 이 필터에서 제거된다. 그런 다음에는 manifold check valve에 유입된다. 엔진 중 하나가 고장 난 경우, 혹은 펌프 중 하나가 고장 난 경우 check valve는 고장 난 시스템을 차단한 다음 작동 중인 시스템을 통해 공기를 유입한다. 공기가 계기를 통과하여 자이로를 구동한 다음에는 케이스로부터 배출된다. gyro pressure gauge는 계기 전체의 압력 강하를 측정한다.
Electrical Systems
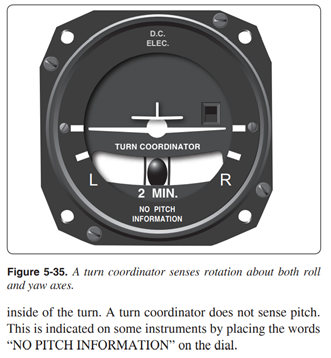
공압식 자세계를 사용하는 많은 범용항공 항공기는 전기로 작동하는 rate indicators를 사용한다(혹은 그 반대). 일부 계기들은 다이얼에 그 전원을 나타낸다. 그러나 조종사는 POH/AFM을 참조하여 모든 계기의 전원을 알아야 한다. 이는 계기 고장 시 어떤 조처를 해야 하는지를 알아야 하기 때문이다. 직류(D.C.) 전자 계기들은 항공기의 전기 시스템에 따라 14-volt, 혹은 28-volt 모델에서 사용될 수 있다. 일부 attitude gyros와 autopilots를 작동하기 위해 교류(A.C.)가 사용된다. 직류 전기 시스템만을 장비한 항공기는 DC-AC 변환 장치를 설치하여 교류 계기를 사용할 수 있다. 이는 D.C. 14-volt, 혹은 28-volt를 3상 115-volt, 400-Hz A.C.로 변환한다.
'Instrument Flying Handbook(2012) > 5: Flight Instruments' 카테고리의 다른 글
| (4) Dynamic Pressure Type Instruments (0) | 2023.02.17 |
|---|---|
| (5) Magnetism (2) | 2023.02.17 |
| (7) Gyroscopic Instruments (0) | 2023.02.17 |
| (8) Flight Support Systems (0) | 2023.02.17 |
| (9) Analog Pictorial Displays (0) | 2023.02.17 |