The Decision-Making Process
의사 결정 과정에 대한 이해는 조종사로 하여금 ADM 기법과 SRM 기법을 개발할 수 있는 기반을 제공한다. 일부 상황의 경우(예를 들어 엔진 고장) 특정 절차를 사용하는 즉각적인 조치가 필요하다. 허나 일반적으론 결정을 내리기 전에 비행 도중 발생하는 모든 변화들을 분석하고, 정보를 수집하고, 위험을 평가할 시간이 있다.
risk management와 risk intervention은 위험요소를 체계적으로 식별하고, 위험의 정도를 평가하며, 최선의 조치를 결정하도록 설계된 의사 결정 과정이다. 이러한 절차에는 위험요소의 식별, 위험의 평가, 통제 조치 분석, 통제 조치 결정, 통제 조치 사용, 그리고 결과 모니터링이 포함된다.
이러한 결정에 이르는 단계들은 의사 결정 과정을 구성한다. 문제 해결 및 의사 결정을 위한 체계의 세 가지 모델은 5P model, 3P model, 그리고 DECIDE model이다. 이들은 의사 결정 과정을 편성하는데 도움을 제공한다. 모든 모델들은 single pilot으로 하여금 중요한 결정을 편성하는데 도움을 제공하는 것으로 확인되었다.
Single-Pilot Resource Management(SRM)
SRM(Single-Pilot Resource Management)은 정보를 수집 및 분석한 다음 결정을 내리는 방법에 대한 것이다. 문제를 식별하는, 정보를 분석하는, 그리고 정보에 입각한∙시기적절한 결정을 내리는 방법을 배우는 것은 특정 기동을 배우는 훈련처럼 간단하지 않다. 비행 도중 마주치는 다양한 상황에서 상황을 판단하는 방법을, 그리고 “생각하는 방법”을 배우는 것은 훨씬 어렵다.
ADM에는 정답이 없다. 오히려 각 조종사들은 경험 수준, personal minimums, 그리고 신체적 및 정신적 상태를 고려하여 각 상황을 분석한 다음 결정을 내려야 한다.
The 5Ps Check
조종사들이 일상적인 비행 도중 SRM을 이해 및 사용할 수 있는 방법이 필요하다. 한 가지 실용적인 적용 방법을 “Five Ps(5Ps)”라 부른다. [그림 2-9] 5Ps는“the Plane, the Plane, the Pilot, the Passengers, 그리고 the Programming”으로 구성된다. 각 영역은 모든 조종사가 직면하는 일련의 도전과 기회들로 구성된다. 정보에 입각한∙시기적절한 결정을 내리는 조종사의 능력에 따라 각 도전과 기회는 비행을 성공적으로 완료할 수 있는 위험을 크게 높이거나 낮출 수 있다. 비행 도중, 혹은 비상 상황 도중 주요 의사 결정 시점에서 조종사는 현재 상황을 평가하기 위해 5P를 사용한다. 이러한 의사 결정 시점으로는 비행 전, 이륙 전, 매시간(혹은 비행의 중간지점), 하강 전, final approach fix 전, 그리고 traffic pattern에 진입하기 전이 포함된다.

5P는 조종사의 환경에 영향을 미치는 다섯 가지 변수가 존재하며 이들은 하나의 중요한 결정을 내리도록 강제한다는 개념에 기초한다. 이러한 변수들이 the Plan, the Plane, the Pilot, the Passengers, 그리고 the Programming이다. 이 개념은 현재의 의사 결정 모델들이 본질적으로 반동적인 경향이 있다는 믿음에서 비롯되었다. 조종사가 위험 관리 결정을 내리기 위해선 변화가 발생되어야 하며 조종사는 이를 감지해야 한다. 예를 들어 많은 조종사들이 이륙 전에 risk management sheets를 작성한다. 이는 그날 발생할 수 있는 위험의 목록을 구성한다. 각 위험에는 수치가 할당된다. 이러한 수치들의 합계가 특정 수준을 초과할 경우 비행이 변경, 혹은 취소된다. 비공식 연구에 따르면 이 문서가 위험 요소들을 가르치는데 유용하긴 하나 공식 훈련 프로그램 외에서는 거의 사용되지 않는 것으로 나타났다. 5P 개념은 이러한 문서와 기타 모델들에 포함된 정보를 가져와서 사용하려는 시도이다.
5P 개념은 조종사로 하여금 의사 결정이 가장 효과적인 시점에서 중요 변수를 검토하도록 한다. 예를 들어 악천후로 인해 비행을 취소하기 가장 쉬운 시점은 조종사와 승객들이 문을 나서기 전이다. 따라서 첫 번째 결정 시점은 비행 전 flight planning room에서이다. 여기서 타당할 결정을 내리기 위해 정보들을 이용할 수 있으며 대체 계획을 세우기 위해 교신 서비스와 FBO(Fixed Base Operator) 서비스를 이용할 수 있다.
중요한 안전 결정을 내릴 두 번째 시점은 이륙 전이다. 이륙 전 5P를 올바르게 적용하는 것은 모든 정보를 바탕으로 합리적인 go/no-go 결정을 내리는데 도움이 된다. 이 결정은 일반적으로 특정 제한 및 변화를 통해 “go”를 하는 것이지만 “no-go”가 될 수도 있다. 중요한 것은 이 두 가지 시점이 모든 비행에서 중요한 go/no-go 시점이라는 것이다.
세 번째로 5Ps를 검토해야 할 시점은 비행의 중간지점이다. 종종 조종사들은 ATIS(Automated Terminal Information Service)가 수신 범위 내에 들어올 때까지 기다렸다가 기상을 확인한다. 허나 이 시점에서는 이미 좋은 선택지들이 많이 지나간 후이다. 또한 피로와 저고도 저산소증은 비행이 끝날 때까지 조종사의 에너지를 빼앗아간다. 이로 인해 조종사는 decision-making mode에서 acceptance mode로 전환된다. 비행시간이 2시간 이상인 경우 5P 점검을 매시간 마다 수행해야 한다.
마지막 두 결정 시점은 terminal area를 향한 하강 전, 그리고 final approach fix 전(혹은 VFR인 경우 traffic pattern에 진입하기 전)이다. 대부분의 조종사는 매 접근 시 착륙을 예상하고 접근을 수행한다. 보다 유익한 접근을 위해선 조종사는 매 접근마다 변화 조건들로 인하여 우회, 혹은 실패 접근을 수행할 수 있다고 가정해야 한다. 이를 통해 조종사는 위험을 증가시키고 비행 안전을 위협할 수 있는 모든 종류의 조건들에 대해 경각심을 유지할 수 있다. 순항 고도에서 우회할 경우 연료가 절약되고, autopilot을 여유롭게 사용할 수 있으며, 덜 반동적이다. final approach fix에서 우회하는 것은 더 어렵다. 허나 조종사가 실패 접근을 수행하는 것보다 더 나은 계획 및 조정을 수행할 수 있도록 해준다. 이제 5Ps의 각 항목에 대한 자세한 설명을 살펴보자.
The Plan
“Plan”은 mission, 혹은 task라고도 할 수 있다. 이는 cross-country 계획, 기상, 경로, 연료, 최신 간행물, 등등을 포함한다. “plan”은 비행 도중 여러 번 검토 및 업데이트 되어야 한다. 정비로 인한 이륙 지연, 빠르게 움직이는 기상, 그리고 TFR은 모두 계획을 변경시킬 수 있다. “plan”은 비행 계획뿐만 아니라 비행을 둘러싼, 그리고 조종사로 하여금 임무를 완수할 수 있도록 하는 모든 상황들에 대한 것이다. plan은 항상 업데이트 및 수정되며 다른 네 가지 P의 변화에 민감하게 반응한다. 5P 점검은 조종사로 하여금 그 날의 비행 계획이 실제 상황이며 언제든지 변경될 수 있음을 상기시켜 준다.
기상은 모든 계획에서 큰 부분을 차지한다. 데이터링크 기상 정보를 사용할 경우 조종사는 악천후에서 실질적 이점을 얻을 수 있다 허나 이는 상황 인식을 희생하지 않고 실시간으로 날씨를 검색 및 평가할 수 있도록 훈련된 경우에만 가능하다. 물론 현재 계획대로 비행을 계속하는 경우에도 기상 정보를 바탕으로 결정을 내려야 한다. 데이터링크 기상 정보가 없는 경우 조종사는 FSS 및/혹은 Flight Watch를 통해 기상 정보를 제공받아야 한다.
The Plane
“plan”과 “plane”은 둘 다 조종사에게 친숙한 용어이다. “plane”은 모든 항공기 조종사, 소유자, 혹은 운영자가 식별할 수 있는 일반적인 기계적 문제와 외관상 문제로 구성된다. 첨단 항전장비의 등장으로 인해 “plane”은 database currency, automation status, 그리고 emergency backup systems를 포함하도록 확장되었다. autopilot이 장착되지 않은 항공기로 low IFR을 수행하는 경우 이 외의 P들에 고려해야할 수 있다. 조종사 숙련도, currency, 그리고 피로가 그중 하나이다.
The Pilot
비행은 조종사를 위험(예를 들어 높은 고도, 상당한 지구력을 필요로 하는 긴 비행, 그리고 악기상)에 노출시킬 수 있다. 첨단 항전장비는 조종사를 높은 스트레스에 노출할 수 있다. 이는 이용 가능한 추가 기능들 때문이다. 조종사 위험을 다룰 경우 항상 “IMSAFE” checklist를 참조하는 것이 좋다.
늦은 밤, 조종사 피로, 그리고 5,000ft 이상에서의 영향들이 조합될 경우 조종사는 덜 분별력 있게 되고, 정보에 대해 덜 비평적이게 되며, 결단력이 부족해지고, 고분고분해질 수 있다. 비행의 가장 중요한 구간(예를 들어 4시간의 비행 후 야간 계기 접근)이 다가올 때 조종사의 경계심이 가장 크게 저하된다. 5P 절차는 이륙 전 조종사가 비행이 끝날 무렵에 직면할 수 있는 생리적 문제를 인지하는데 도움을 제공한다. 또한 이는 비행이 진행됨에 따라 개인 상태를 업데이트할 수 있도록 돕는다. 위험이 식별될 경우 조종사는 이러한 요소들의 영향을 줄이고 더 안전한 해결책을 제공하는 대체 계획을 세울 수 있다.
The Passengers
CRM과 SRM의 주요 차이점 중 하나는 승객들이 조종사와 상호 작용하는 방법이다. 고성능 단발 항공기의 조종사는 승객들과의 대인 관계에 유리하다. 왜냐하면 승객들이 조종사와 매우 가까운 거리에 위치하기 때문이다.
중요한 미팅을 적시에 해야 하는 승객의 필요성은 조종사의 의사 결정 과정에 영향을 미친다. 중요한 미팅을 위해 Washington, D.C.로 가야 하는 승객들의 Dulles Airport행 항공편을 예로 들어보자. southern Virginia까지는 VFR 기상이며 Dulles 접근 시 low IFR로 변화한다. 5P를 사용하는 조종사는 northern North Carolina나 southern Virginia에 있는 공항에서 렌터카를 예약하는 것을 고려할 수 있다. 따라서 승객들은 Washington에 도착할 방법이 있으며 조종사는 상황이 개선되지 않을 경우 비행을 계속해야 한다는 압박을 피할 수 있다.
승객 또한 조종사가 될 수 있다. 만약 아무도 PIC(pilot in command)로 지정되지 않았으며 예기치 않은 상황이 발생하였다면 자신감 넘치는 몇몇 조종사들의 의사 결정 스타일들이 충돌할 수 있다.
비조종사는 비행과 관련된 위험 수준을 이해하지 못할 수 있다는 것을 조종사는 알아야 한다. 모든 비행에는 위험 요소가 있다. 그렇기 때문에 SRM은 이를 risk elimination이 아닌 risk management라 부른다. 야간 IFR 비행의 위험에 대해 조종사는 편안함을 느낄 수 있지만 승객은 그렇지 않을 수도 있다. SRM을 활용하는 조종사는 승객이 의사 결정에 참여하도록 해야 하며 그들에게 업무와 임무를 부여해야 한다. 위험에 대한 사실적인 설명을 듣고 승객이 항공권을 구매하기로, 혹은 차를 빌리기로 결정하였다면 보통 적절한 결정이 내려진 것이다. 또한 이러한 토론을 통해 조종사는 승객이 실제로 무엇을 원하는지 파악할 수 있다. 이는 조종사로 하여금 압박감을 없애준다.
The Programming
첨단 항전장비는 범용 항공 항공기의 비행 방식에 새로운 차원을 추가한다. electronic instrument displays, GPS, 그리고 autopilot은 조종사의 업무량을 줄여주며 상황 인식을 높여준다. 이러한 장치들의 프로그래밍 및 작동은 꽤나 단순하다. 허나 아날로그 계기와는 달리 조종사의 주의를 장시간 사로잡는 경향이 있다. 이러한 현상을 방지하기 위해 조종사는 접근, 경로 변경, 그리고 공항 정보 수집을 위한 프로그래밍을 수행 할 시기 및 장소(그리고 수행해선 안 되는 시기 및 장소)를 미리 계획해야 한다. 장비, 경로, ATC 환경, 그리고 automation에 대한 친숙도가 automation을 프로그래밍 및 사용할 시기•장소•방법을 결정해야 한다.
또한 조종사는 항공기를 직접 조종하는 동안 접근의 막바지 변경(및 필요한 reprogramming)에 대응할 수 있는 능력, 그리고 많은 변경(예를 들어 reroute)을 수행할 수 있는 능력도 고려해야 한다. 형식이 표준화되어있지 않으므로 한 제조업체의 장비에서 다른 제조업체의 장비로 바꾸는 것만으로도 조종사를 주저하게 만들며 보다 보수적인 계획과 결정이 필요하다.
SRM 절차는 간단하다. 비행 전 및 비행 도중 최소 다섯 번은 “the Plane, the Plane, the Pilot, the Passengers, 그리고 the Programming”을 검토 및 고려하여 현재 상황에 필요한 적절한 결정을 내려야 한다. 흔히 결정을 내리지 않는 것도 결정이라 말한다. SRM과 5Ps의 경우 현재 계획을 변경하지 않는 결정조차도 모든 위험 요소들을 신중하게 고려하여 결정된다.
Perceive, Process, Perform (3P) Model
ADM을 위한 3P Model은 모든 비행 단계에서 사용될 수 있는 간단한, 실용적인, 그리고 체계적인 접근법을 제공한다. 이를 사용하기 위해 조종사는:
• 비행에 대한 특정 상황을 파악(perceive)한다.
• 비행 안전에 미치는 영향을 평가 및 처리(process)한다.
• 최선의 조치를 수행(perform)한다.
모든 항공 의사 결정에 대하여 Perceive, Process, Perform, 그리고 Evaluate 방법을 연속적 모델로 사용한다. 비록 인간은 실수를 할 수 밖에 없지만 안전에 대한 잠재적 위협을 인지 및 최소화하기 위해 할 수 있는 모든 일을 할 경우 더 나은 조종사가 될 수 있다.
활동의 성격, 그리고 이용 가능한 시간에 따라 위험 관리는 세 가지 기간 중에서 수행될 수 있다. [그림 2-10] 대부분의 비행 훈련 활동은 위험 관리에 대하여 “time-critical” 기간에 이루어진다. 위험 관리의 6 단계는 실질적 위험 관리를 위해 3P 모델과 결합될 수 있다: Perceive, Process, Perform과 PAVE, CARE, TEAM checklist. 조종사는 PAVE checklist(Pilot, Aircraft, enVironment, 그리고 External pressres)를 사용하여 위해요소를 인지할 수 있다. 조종사는 CARE checklist(Consequences, Alternatives, Reality, External factors)를 사용하여 위해요소를 처리할 수 있다. 마지막으로 조종사는 TEAM checklist(Transfer, Eliminate, Accept, 혹은 Mitigate)를 사용하여 위험 관리를 수행할 수 있다.

PAVE Checklist: Identify Hazards and Personal Minimums
첫 번째 단계의 목적은 위해요소(원치 않는 미래 사건에 기여할 수 있는 상황이나 물체)를 감지하여 상황 인식을 개발하는 것이다. 이 단계에서 조종사는 비행의 모든 측면과 관련된 위해요소들을 체계적으로 식별 및 나열한다: Pilot, Aircraft, enVironment, 그리고 External pressures. [그림 2-11] 각 요소에 대해 “무엇이 나에게, 승객에게, 혹은 항공기에 해를 끼칠 수 있는가?” 라고 질문한다. 네 가지 요소들이 결합 및 상호작용하여 비행에 대한 독특한 상황을 만들어낸다. pilot-aircraft 조합에 특히 주의를 기울여야 하며 “pilot-aircraft team”이 비행 임무를 수행할 수 있는지를 고려해야 한다. 예를 들어 당신은 경험이 풍부한 숙련된 조종사일 수 있다. 허나 기상 회피 장비가 없는 1970년대 항공기를 조종하는 경우 비행 능력은 여전히 제한적이다. 반면 조종사가 moving map GPS, weather datalink, 그리고 autopilot을 갖춘 신형 항공기를 보유하고 있을 수 있다. 허나 비행 경험이 적거나, 혹은 이런 종류의 장비를 사용해본 적이 없다면 경험 부족을 보완하기 위해 비행기의 기능에 의존할 순 없다.

CARE Checklist: Review Hazards and Evaluate Risks
두 번째 단계에서는 식별된 위해요소가 위험(통제되지 않은, 혹은 제거되지 않은 위해요소의 미래 영향)을 구성하는지의 여부를 결정하기 위해 이 정보를 처리하는 것이 목표이다. 특정 위해요소에 의해 발생하는 위험의 정도는 exposure(영향을 받는 사람이나 자원의 수), severity(가능한 손실의 정도), 그리고 probability(위해요소로 인해 손실이 발생할 가능성)로 측정될 수 있다. 목표는 이것들이 비행 안전에 미치는 영향을 평가하는 것, 그리고 “왜 이러한 상황에 주의를 기울여야 하는가?”를 고려하는 것이다.
첫 번째 단계에서 인지한 각 위해요소를 CARE checklist(Consequences, Alternatives, Reality, External factors)를 통해 처리한다. [그림 2-12] 예를 들어 비즈니스 미팅에 참석하기 위한 야간 비행을 평가해 보자:
Consequences – 하루 일과를 마친 후 출발할 경우 피로와 압박감이 커진다.
Alternatives – 내일 아침으로 지연한다. 미팅 일정을 변경한다. 운전한다.
Reality – 피로로 인한 위험 및 주의 산만으로 인해 사고로 이어질 수 있음.
External pressures – 목적지에서의 비즈니스 미팅이 나에게 영향을 미칠 수 있음.

처리 과정에 대한 좋은 rule of thumb는 다음과 같다: “아마도” 괜찮을 것 같다는 생각이 든다면 확실한 점검이 필요한 때이다. 회의에 불참하는 것이 걱정된다면 해당 압박감이 조종사의 go/no-go 결정뿐만 아니라 비행을 계속할, 혹은 우회할 결정에 어떤 영향을 미칠지 현실적으로 생각하라.
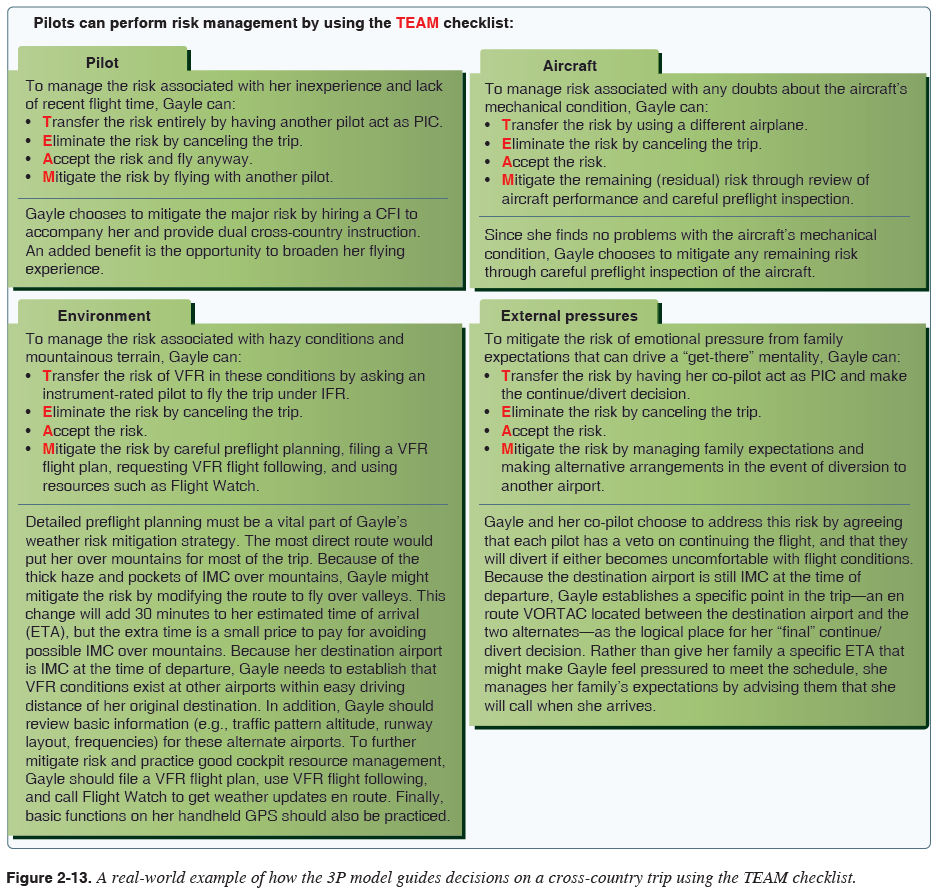
TEAM Checklist: Choose and Implement Risk Controls
위해요소를 인지하였고(첫 번째 단계) 비행안전에 미치는 영향을 처리하였다면(두 번째 단계) 세 번째 단계(perform)로 넘어갈 때이다. 각 요소들을 처리하기 위해 TEAM checklist(Transfer, Eliminate, Accept, Mitigate)를 사용하여 위험 관리를 수행한다. [그림 2-13]
Transfer – 이 위험 결정을 다른 누군가에게 전달해야 하는가?(예를 들어 비행 교관과 상의해야 하는가?)
Eliminate – 위해요소를 제거할 수 있는 방법이 있는가?
Accept – 위험을 수용함으로써 얻을 수 있는 이점이 비용보다 많은가?
Mitigate – 위험을 완화하기 위해 무엇을 할 수 있는가?
목표는 위해요소를 제거하기 위한, 혹은 위험을 완화하기 위한 조치를 취한 다음 이 조치의 결과를 지속적으로 평가하는 것이다. 예를 들어 목적지의 ceiling이 낮은 경우 조종사는 적절한 대안을 선택하고, 기상이 좋은 위치를 찾고, 그곳에 도달할 수 있는 충분한 연료를 탑재함으로써 훌륭한 ADM을 수행할 수 있다. 이러한 조치는 위험을 완화할 수 있다. 또한 조종사는 더 나은 기상을 기다림으로써 이를 완전히 제거하는 선택지도 가지고 있다.
조종사가 3P 결정 과정을 완료하고 행동 조치를 선택하였다면 새로운 과정이 시작된다. 왜냐하면 행동 조치가 가져오는 일련의 상황들은 분석을 필요로 하기 때문이다. 의사 결정 과정은 인지, 처리, 그리고 수행의 끈임 없는 반복이다. 연습 및 일관된 사용을 통해 3P 과정은 매끄럽고, 연속적이며, 무의식적인 습관이 될 수 있다. 이러한 실질적 위험 관리 수단들을 통해 위험 관리를 개선할 수 있다.
안전한 결정을 기꺼이 따르려는 정신적 의지는 매우 중요하다. 조종사는 다음을 통해 정신적으로 강화될 수 있다:
∙ 비행 전에 personal minimums checklist를 사용하여 몇 가지 결정을 내린다. 훌륭한 personal minimums checklist를 개발하기 위해선 자신의 능력을 평가해야 한다. personal minimums checklist가 개발되었다면 이는 go/no-go 결정, 혹은 continue/discontinue 결정을 내릴 명확하고 간결한 기준점을 제공한다.
∙ 일부 조종사들은 ADM과 위험 관리 절차를 위해 personal minimums 뿐만 아니라 preflight risk assessment checklist도 사용한다. 이는 특정 위험과 상황에 수치를 할당하여 특정 비행이 높은 수준의 위험을 수반하는지를 쉽게 알 수 있게 해준다.
∙ 처리 단계에서 좋은 대안들의 목록을 작성한다. 예를 들어 비행경로 상 매 25 ~ 30NM마다 적절한 교체비행장을 식별함으로써 위험을 줄일 수 있다.
∙ 지연 및 우회의 가능성에 대비하여 승객들을 준비시킨다. 그리고 평가 과정에 승객들을 포함시킨다.
∙ 많은 조종사들이 간과하는 또 다른 중요한 수단은 비행 후 분석이다. 최대한 객관적으로 비행을 검토 및 분석하는 시간을 가져야 한다. 실수와 판단 오류는 불가피한 것이므로 다음 비행 전에 이를 인지, 분석, 그리고 학습하는 것이 가장 중요하다.
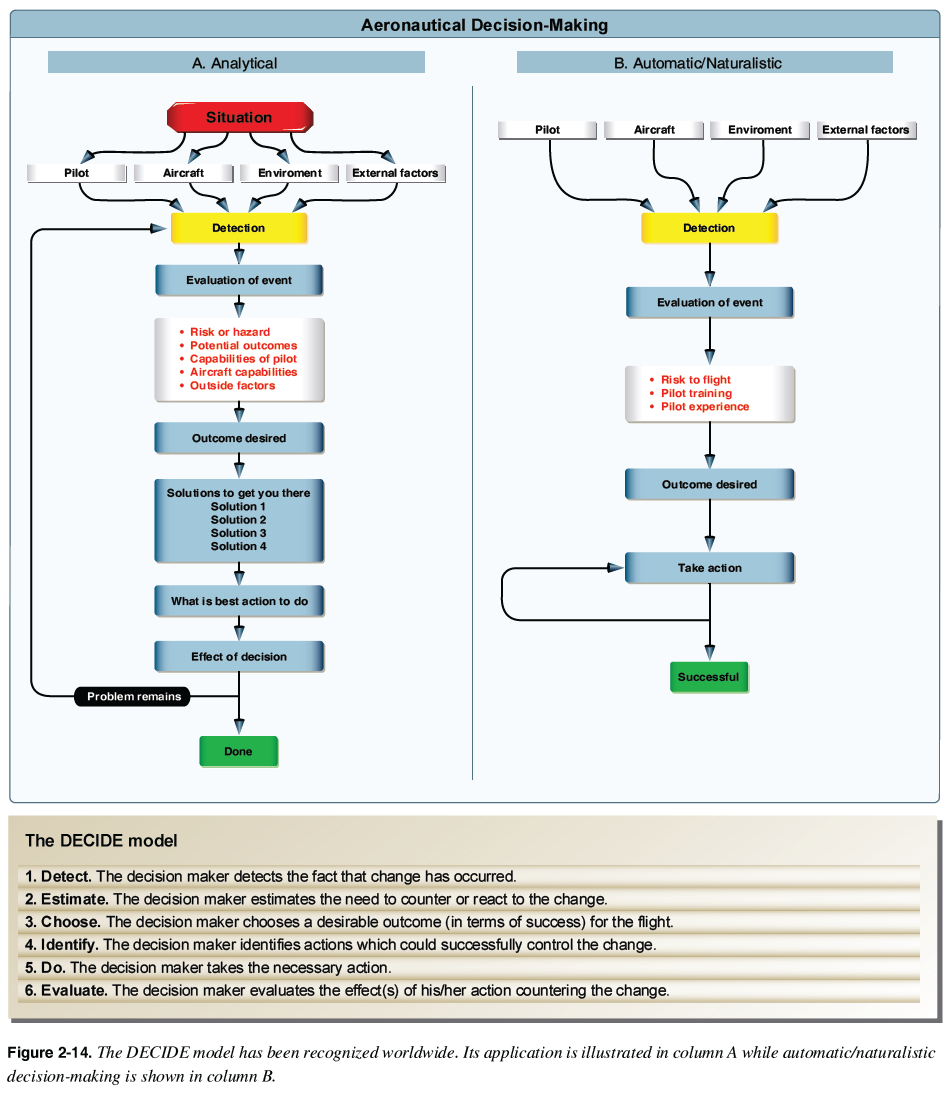
The DECIDE Model
6 단계 과정인 DECIDE 모델은 조종사에게 논리적 의사 결정 방법을 제공하는 또 다른 절차이다. [그림 2-14] DECIDE는 Detect, Estimate, Choose a course of action, Identify solutions, Do the necessary actions, 그리고 Evaluate the effects of the actions를 의미한다.
먼저 Piper Apache(PA23)와 관련된 최근 사고를 고려해보자. 해당 항공기는 Alabama의 공항 지형과 충동하여 상당한 손상을 입었다. ATP(airline transport pilot)는 경미한 부상을 입었고 private pilot은 부상을 입지 않았다. private pilot은 multi-engine rating에서의 commercial pilot certificate를 위해 ATP로부터의 checkride를 받고 있었다. 공중 조작을 마친 후 공항으로 돌아올 때 private pilot은 착륙을 위해 single-engine approach를 수행하였다. 이후 이륙을 위해 다시 taxi하였고 short field takeoff를 수행한 뒤 착륙을 위해 traffic pattern에 진입하였다. 두 번째 착륙을 위한 접근 도중 ATP는 오른쪽 엔진의 출력을 zero thrust로 감소시킴으로써 우측 엔진 고장을 시뮬레이션 하였다. 이는 항공기를 우측으로 yaw하게 만들었다.
고장 난 엔진을 식별하는 절차는 두 단계로 이루어진다. 첫 번째, 양 쪽 엔진에 최대 출력을 적용한다. 왼쪽 엔진만이 추력을 전달하므로 우측으로 yaw가 증가하여 left rudder가 필요하다. 고장 난 엔진은 rudder pressure가 필요 없는 쪽이다(이 경우 우측 엔진). 두 번째, 우측 엔진의 고장을 식별한 후 우측 엔진을 feather 한다. 그리고 착륙을 위한 하강각도를 유지할 수 있도록 출력을 조절한다.
그러나 이 경우 조종사는 왼쪽 엔진 고장이 발생하였다 추정하고 왼쪽 엔진을 feather 하였다. twin-engine 훈련 도중 왼쪽 엔진이 꺼지는 것이 우측 엔진이 꺼지는 것보다 더 강조된다. 왜냐하면 대부분의 light twins에서 왼쪽 엔진이 critical engine이기 때문이다. 이는 multiengine airplanes가 single-engine airplanes와 마찬가지로 P-factor의 영향을 받기 때문이다. 비행기가 출력 조건 및 양의 받음각 조건인 경우 각 엔진의 하강하는 프로펠러 블레이드는 상승하는 블레이드보다 더 높은 추력을 생성한다. 또한 우측 엔진의 하강하는 프로펠러 블레이드는 좌측 엔진의 하강하는 프로펠러 블레이드보다 무게 중심으로부터 더 멀리 있으므로 더 긴 모멘트 암을 갖는다. 따라서 왼쪽 엔진의 고장이 최대 비대칭 추력(adverse yaw)을 초래할 것이다. 많은 twins가 counter-rotating right engine으로 설계된다. 이 설계의 경우 어떤 엔진이 고장 나더라도 비대칭 추력이 동일하다. 두 엔진 모두 서로 다른 엔진보다 중요(critical)하지 않다.
조종사는 어떤 엔진이 고장 났는지를 식별하는 첫 번째 단계를 수행하지 않았기 때문에 왼쪽 엔진을 feather 하였고 오른쪽 엔진을 zero thrust로 설정하였다. 이로 인해 항공기는 사실상 활공하기 시작하였다. 활주로에 도달하지 못하리라 판단한 후 조종사는 양 쪽 엔진의 출력을 증가시켰다. 이는 상당한 yaw를 왼쪽으로 발생시켜(좌측 프로펠러가 feather 되어있으므로) 항공기를 왼쪽으로 회전시키기 시작하였다. 교관은 양 쪽 throttles를 닫았고 항공기는 지상에 부딪혀 상당한 손상을 입었다.
이 사례는 두 가지 특별한 문제를 강조한다. 첫째, 미리 생각하지 않고 행동을 취하는 것은 아무 것도 하지 않는 것만큼이나 위험할 수 있다. 이 경우 조종사는 시뮬레이션 된 비상 상황을 분석하기 위해 필요한 절차들을 밟을 충분한 시간이 있었다. 두 번째, 압박감 속에서 내려진 결정은 때때로 제한된 경험에 근거하여 수행되며 그 결정은 상황을 처리하기에 부정확하거나, 불완전하거나, 혹은 불충분할 수 있다는 것이다.
Detect(the problem)
문제 탐지는 의사 결정 과정의 첫 단계이다. 이는 변화가 발생하였음을, 혹은 예상하였던 변화가 발생하지 않았음을 인지하는 것에서 시작된다. 문제는 감각들을 통해 인지된 다음 통찰력, 그리고 경험을 통해 식별된다. 이러한 능력들, 그리고 정보에 대한 객관적 분석은 문제의 특성과 심각성을 결정하는데 사용된다. 의사 결정 과정에서 발생하는 한 가지 중요한 실수는 문제를 잘못 탐지하는 것이다. 앞선 예시에서 발생한 변화는 yaw였다. (ATP: 착륙 도중 landing gear가 연장되지 않은 것을 알아차리지 못하는 것은 시스템 교육이나 절차상 지식이 부족하여 발생한 것이 아니다. 이는 단순히 문제를 감지하지 못한 것이다.)
Estimate(the Need To React)
앞선 예시에서 비행기는 오른쪽으로 yaw 하였고, 조종사는 final approach 도중이었으며, 문제의 즉각적 해결이 필요하였다. 많은 경우 과잉 반응, 그리고 fixation은 안전한 결과를 배제시킨다. 예를 들어 맑은 날에 1,500ft 상승 도중 cabin door가 갑자기 열렸다면 어땠을까? 갑자기 문이 열리면 놀랄 수는 있다. 허나 열린 문으로 인한 위해요소는 순간적이며 경미하다 평가된다. 사실 열린 문은 비행 안전에 영향을 미치지 않을 것이며 거의 무시될 수 있다. 아마도 조종사는 착륙 후 문을 잠그기 위해 공항으로 되돌아올 것이다.
이러한 사소한 문제에 직면한 조종사는 열린 문을 낮은 위험으로 평가할 수 있다. 그렇다면 IMC conditions(비가 오고 있으며 간헐적으로 light turbulence가 있음)에서 IFR 상승 중인 조종사가 ATC로부터 amended clearance를 받았다면 어떠할까? 이 경우 열린 문은 높은 위험 요소가 된다. 문제가 변하지는 않았으나 조종사가 부여하는 위험의 인식이 달라진다. 이는 현재 진행 중인 작업들과 환경 때문이다. 경험, 훈련, 인식, 그리고 지식은 조종사가 문제의 순위를 매기는 방법에 영향을 미친다.
Choose(a Course of Action)
문제가 확인되었고 그 영향이 평가되었다면 조종사는 바람직한 결과를 결정한 다음 조치를 선택해야 한다. 앞선 예시에서 조종사의 바람직한 목표는 비행기를 안전하게 착륙하는 것이다.
Identify(Solutions)
목표를 달성시켜줄 계획을 수립한다. 때로는 이용 가능한 조치가 하나밖에 없을 수도 있다. 500ft 미만에서 엔진 고장이 발생한 경우 조종사는 성공적인 결과를 이끌어내는 하나 이상의 해결책을 식별함으로써 문제를 해결한다.
Do(the Necessary Actions)
해결책들이 식별되었다면 상황에 가장 적합한 것을 선택한다. 앞선 예시에서 조종사는 이제 항공기를 안전하게 착륙시켜야 한다. 결정을 내리는 것이 배제될 정도로 절차에 집착하지 않는 것이 중요하다.
Evaluate(the Effect of the Action)
해결책을 실행한 후 그 결정이 올바른지 평가한다. 수행한 조치가 적절한 결과를 제공하지 못하였다면 절차를 반복해야 할 수도 있다.
'PHAK(2023) > 2: Aeronautical Decision-Making' 카테고리의 다른 글
| (6) Human Factors (0) | 2023.11.24 |
|---|---|
| (7) Human Behavior (0) | 2023.11.24 |
| (9) Decision-Making in a Dynamic Environment (0) | 2023.11.24 |
| (10) Situational Awareness (1) | 2023.11.24 |
| (11) Automation (1) | 2023.11.24 |