Jet Airplane Takeoff and Climb
다음 정보는 일반적인 정보이며 대부분의 민간 제트 비행기는 최소 2명의 승무원을 필요로 하므로 two-pilot crew를 가정한다. 다음 정보들 중 AFM 절차와 반대되는 것이 있다면 AFM 절차가 우선된다.
V-Speeds
다음은 제트 비행기의 이륙 성능에 영향을 미치는 속도들이다. 제트 비행기 조종사는 이륙 계획 시 이러한 속도를 사용하는 방법을 알아야 한다.
∙VS – stall speed(비행기가 제어될 수 있는 minimum steady flight speed).
∙V1 – critical engine failure speed(takeoff decision speed). 이는 엔진 고장이나 그 외 심각한 비상사태가 발생하였을 때 조종사가 이륙을 결정하는 속도이다. V1 미만의 속도에서는 accelerate-stop distance 내에서 항공기를 정지시키는 것이 더 안전하다 간주된다. 또한 V1은 VEF에서 critical engine이 고장 난 후에 이륙을 계속할 때 takeoff distance 내에서 required height에 도달할 수 있는 최소 속도이다.
(ATP: critical engine failure speed를 감소시키는 조건은 다음과 같다 - (1) 활주로의 slush (2) 높은 총 무게 (3) 낮은 밀도 고도 (4) antiskid 고장.)
(ATP: critical engine failure speed는 비행기 총 무게가 증가함에 따라 감소한다. 왜냐하면 감속 및 정지해야 하는 질량이 증가하기 때문이다. 반면 rotation speed [VR]와 accelerate-stop distance는 항공기 총 무게가 증가함에 따라 증가한다.)
∙VEF – 이륙 도중 critical engine이 고장났다 가정하는 속도.
∙VR – rotation speed(takeoff attitude를 향해 비행기의 rotation이 시작되는 속도). 이 속도는 V1보다, 혹은 1.05 x VMCA(minimum control speed in the air)보다 작을 수 없다.
※ VMCA - 공중에서 한 쪽 엔진은 작동하지 않고 남은 엔진은 이륙 출력으로 설정되어 있을 때 항공기가 만족스럽게 제어될 수 있는 최소 비행 속도.
∙VLOF – lift-off speed(비행기가 공중에 뜨는 속도). 이는 비행기가 특정 조건을 충족하도록 증명될 때 사용되는 용어이다. 만약 AFM에 이 속도가 있다면 조종사는 이 속도를 고려해야 한다.
∙V2 – takeoff safety speed(이륙 후 required one-engine-inoperative climb performance를 달성할 수 있는 기준 속도).
※ 다음은 대한항공 PERFORMANCE 교재를 발췌한 내용이다.
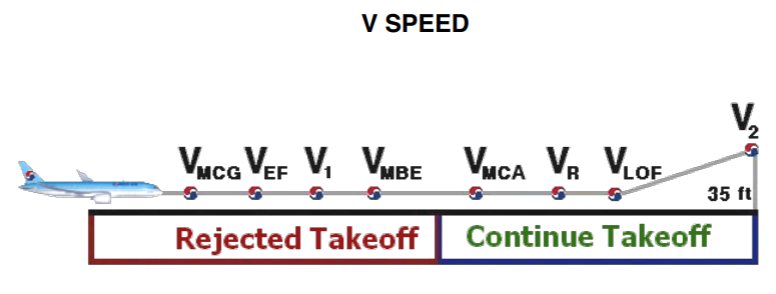

Minimum control speed on the ground(VMCG) - 이륙 활주 도중 critical engine이 갑자기 작동하지 않을 때 지상 제어가 가능한 최소 속도. 이 속도 이상에서는 nose wheel steering 없이 rudder만으로도 비행기를 제어할 수 있다.
Maximum Brake Energy speed(VMBE) - 이륙 중단 시 브레이크가 견딜 수 있는 최대 속도. 공항 기압 고도, 온도, 경사, 그리고 바람이 브레이크의 VMBE에 영향을 미칠 수 있다.
※ 다음은 AIRBUS Flight Operations Briefing Notes를 발췌한 내용이다.
VMU(Velocity of Minimum Unstick)
이륙 활주 도중 항공기 기수를 최대로 올리면(기하학적 한계를 갖춘 항공기의 경우에는 활주로에 꼬리가 닿을 정도로 기수를 올리면) VMU가 달성된다. 항공기가 최초로 부양한 순간의 속도가 VMU이다. 따라서 VMU 이전에는 이륙이 불가능하다.
Note: A318을 제외한 모든 Airbus 항공기 유형들은 기하학적 한계를 갖추고 있다.

Takeoff Roll
활주로와 위치를 확인하였다면 비행기를 활주로 중앙에 정렬한다. 활주로 길이가 제한된 경우 AFM에서 명시하는 출력 설정으로 thrust levers를 조작하고 엔진이 안정화되는 동안 브레이크를 유지한다. 브레이크를 해제하기 전에, 혹은 출력을 더 증가하기 전에 엔진 계기들이 제대로 작동하는지 점검한다. 이러한 절차는 이륙 활주 도중 추력이 대칭이 되게 해주며 적절한 이륙 추력 세팅이 초과되는 것을 방지한다. 브레이크를 해제한 후 미리 계산해둔 이륙 출력 세팅으로 power levers를 설정하고 60노트에 도달하기 전에 이륙 추력을 조정한다. 마지막 엔진 출력 조정은 보통 pilot not flying에 의해 수행된다. 엔진이 어떤 한계를 초과하는 경우에만 thrust lever를 retard 한다.
takeoff data(V1∙VR∙V2, 이륙 출력 세팅, 그리고 필요한 활주로 길이)를 매 이륙 전마다 계산해야 한다. FMS가 없는 비행기의 경우 이러한 데이터를 takeoff data card에 기록해야 한다. 해당 데이터들은 비행기 무게, 이용 가능한 활주로 길이, 활주로 경사, 공항 온도, 공항 기압, 바람, 착빙 조건, 그리고 활주로 조건을 기반으로 한다. 두 조종사는 FMS에 입력된 takeoff data를 검토하거나, 혹은 takeoff data를 각각 계산한 다음 비교검토를 수행해야 한다. 만약 지상 활주 도중 이륙 계획이 변경되었다면 takeoff data를 다시 계산해야 한다.
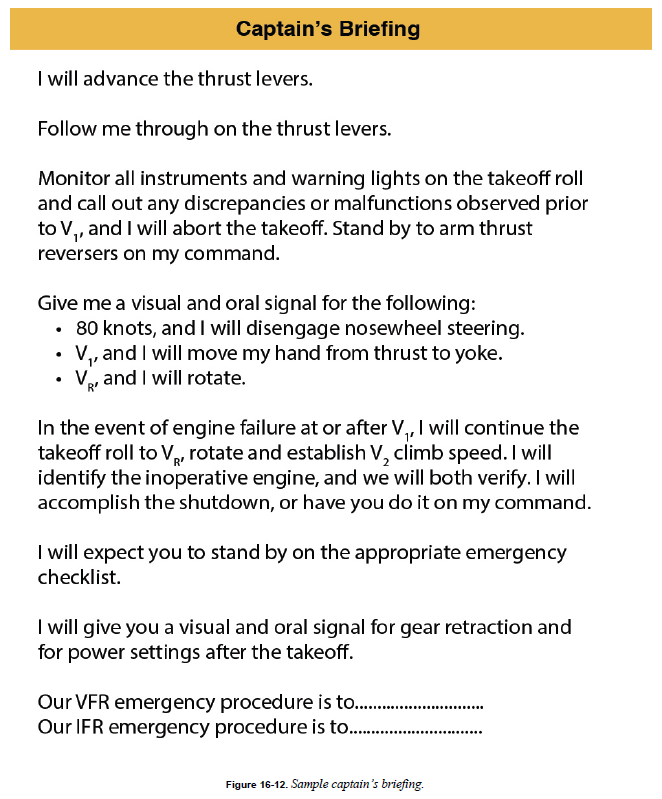
기장의 브리핑은 CRM(crew resource management) 절차의 필수적인 부분이다. 이는 이륙 전에 완료되어야 한다. [그림 16-12]
충분한 활주로 길이를 이용할 수 있다면 end of the runway에서 멈추지 않고 “rolling” takeoff를 수행할 수 있다. 비행기가 활주로를 향해 이동하고 있을 때 thrust levers를 recommended intermediate power setting으로 부드럽게 증가시켜서 엔진이 안정될 수 있게 만든다. 그런 다음에는 앞서 설명한 static takeoff와 동일하게 진행한다. 또한 브레이크를 해제함과 동시에 thrust levers를 idle 상태에서 전진시켜서 rolling takeoffs를 수행할 수도 있다.
이륙 활주 도중 pilot flying은 비행기의 방향 제어에 집중해야 한다. 제트 비행기에는 프로펠러 비행기와 달리 토크로 인한 yawing이 없으므로 이 과정이 다소 쉬워진다. 비행기는 날개 수평 상태로 중심선을 정확히 유지해야 한다. 이는 엔진 고장이 발생하였을 때 저절로 조종사를 돕는다. 만약 측풍이 존재한다면 조종간을 측풍으로 가해서 날개 수평을 유지해야 한다. 이륙 활주 도중 pilot not flying은 항공기 시스템을 면밀히 모니터링 해야 하며 기장이 브리핑에서 지시한 V speeds를 call-out 해야 한다..
nose-wheel이 활주로에서 확실하게 움직일 수 있도록 조종간에 약간의 forward pressure를 가해야 한다. nose-wheel steering을 사용하는 경우 pilot flying은 대략 80노트(혹은 특정 비행기의 경우 VMCG)까지 nose-wheel steering을 모니터링 해야 한다. 이때 pilot not flying은 조종간에 forward pressure를 가한다. VMCG에 도달한 후 pilot flying은 왼손을 조종간에 올려놓아야 한다. 반대쪽 손은 적어도 V1에 도달하기 전까지는 thrust levers 위에 있어야 한다. 이륙 활주 도중 pilot not flying이 엔진 계기를 계속하여 점검하긴 하지만 pilot flying(pilot-in-command)은 어떠한 이유로든 이륙 중단을 결정할 수 있다. 이륙을 중단하기로 결정하였다면 즉시 thrust lever를 retard 해야 한다.
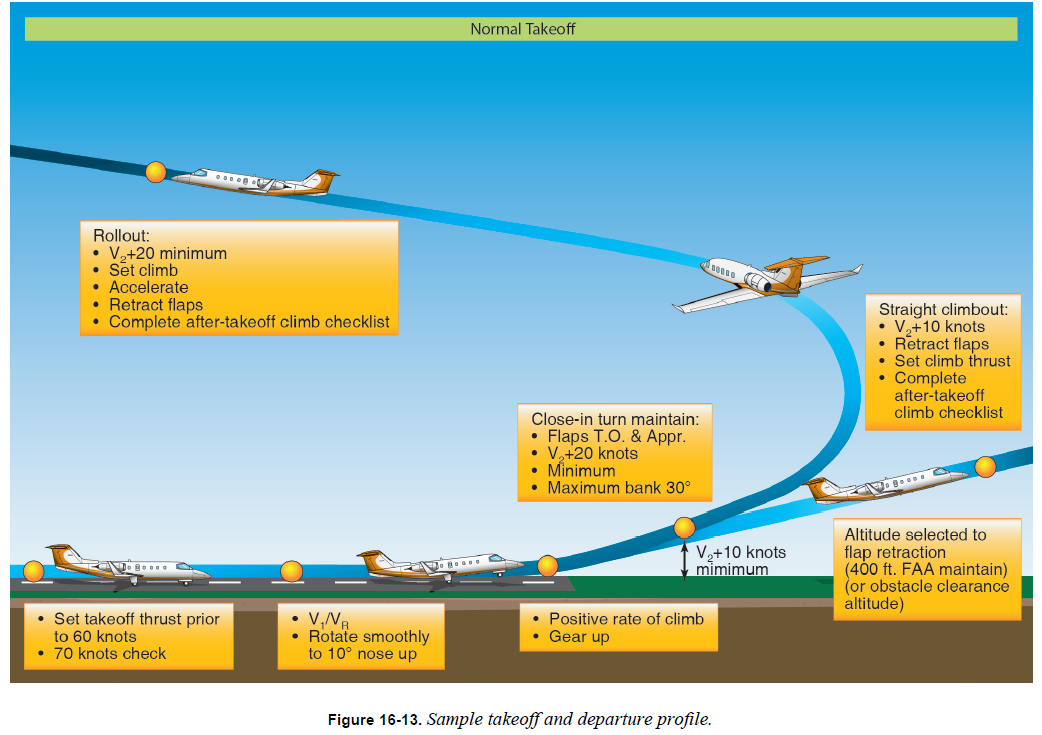
이륙 및 상승은 특정 비행기를 위해 개발된 standard takeoff and departure profile에 따라 수행되어야 한다. [그림 16-13]
pilot not flying은 V1을 call-out 해야 한다. V1을 통과하였다면 pilot flying은 더 이상 thrust levers에 손을 두지 않아도 된다. abort 시점이 지났으므로 pilot flying은 양 손을 조종간에 올려놓을 수 있다. 대기속도가 VR에 가까워지면 조종간을 neutral position으로 조작해야 한다. VR에 도달하면 pilot not flying은 적절한 call-out을 해야 하며 pilot flying은 적절한 이륙 자세로 비행기를 부드럽게 rotate 해야 한다.
Rejected Takeoff
모든 이륙은 다음과 같은 다양한 이유로 인해 rejected takeoff(RTO)로 이어질 수 있다: 엔진 고장, 화재나 연기, 활주로에 놓인 물체, 조류충돌, 타이어 펑크, ATC 지시, 혹은 중대한 비정상(예를 들어 warning horn 작동) 인지.
무분별한 rejected takeoff 결정, 그리고 부적절한 rejected takeoff 조종 기법은 이륙과 관련된 사고의 대부분을 야기한다. 120노트를 초과하는 속도에서의 high-speed aborts는 RTO overrun 사고의 대부분을 차지한다. 순간의 망설임은 활주로를 벗어나는 것과 안전하게 정지하는 것 사이의 차이를 만들 수 있다.
항공기에 대해 FAA가 승인한 takeoff data는 이상적인 조건(깨끗하고 건조한 활주로에서 최대 제동을 사용할 때. 단, 제동 거리를 계산하는데 reverse thrust는 사용되지 않는다)에서의 항공기 성능을 기반으로 한다는 것을 기억해야 한다. 허나 실제로는 제동 성능이 다음과 같은 다양한 요인에 의해 저하될 수 있다:
∙활주로 마찰 감소(grooved/non-grooved)
∙기계와 관련된 활주로 오염물질(고무, 기름 잔여물, 잔해)
∙자연과 관련된 오염물질(고인 물, 눈, 진창 눈, 얼음, 먼지)
∙풍향 및 풍속
∙낮은 공기 밀도
∙flap configuration
∙bleed air configuration
∙타이어 공기압 부족
∙MEL이나 CDL 항목으로 인한 페널티
∙wheel brake나 RTO auto-brakes 부족
∙anti-skid 고장
∙조종사 기술 및 개인 숙련도
조종사가 반응하는데 필요한 시간을 고려하여 늦어도 V1 이전에 감속이 시작될 수 있도록 V1 이전에 go/no-go 결정을 내려야 한다. V1 전에 제동이 시작되지 못하였다면 기본적으로 이륙을 계속하기로 결정한다. RTO 기동을 V1으로부터 단 1초만 늦게 시작하여도 속도가 평균적으로 4 ~ 6노트 증가한다. 조종사가 RTO을 파악하고 기동을 수행하는데 있어 3 ~ 7초가 걸린다는 점을 고려하면 V1 이전에 결정을 내려야 하는 것은 당연하다. 이에 따라 FAA는 V1의 정의를 확장하였으며 AC 120-62, “Takeoff Safety Training Aid”를 통해 몇 가지 새로운 용어들을 도입하였다.
V1의 확장된 정의는 다음과 같다:
a.) V1 – 성능 정보와 특정 조건을 기초로 매 이륙마다 계산되는 속도. V1은 다음을 나타낸다:
1.) rejected takeoff 시 남은 활주로(혹은 runway and stopway) 내에서의 안전한 정지를 보장하는 최대 속도.
2.) 특정 속도에서 critical engine이 고장 난 후 남은 활주로(혹은 runway and clearway) 내에서의 안전한 이륙을 보장하는 최소 속도.
3.) 특정 무게에 대한 minimum allowable field length를 운영할 때 성공적으로 정지하거나 이륙을 계속할 수 있는 하나의 속도.
b.) Minimum V1 – 특정 속도에서 critical engine이 고장 난 후 남은 활주로(혹은 runway and clearway) 내에서 안전하게 이륙할 수 있는 최소 V1 속도.
c.) Maximum V1 – rejected takeoff가 시작된 후 비행기가 남은 활주로(혹은 runway and stopway) 내에서 정지할 수 있는 최대 V1 속도.
d.) Reduced V1 – maximum V1이나 normal V1보다는 작지만 minimum V1보다는 큰 V1. 이는 RTO 제동 거리를 줄이기 위해 설정된다.
reduced V1은 wet runway나 contaminated runway와 관련된 제동 능력 감소를 고려하여 RTO 제동 거리를 적절하게 조정함과 동시에 조종사에게 약 2초의 인식 시간을 더해준다.
대부분의 항공기 제조업체들은 “low-speed” regime(예를 들어 80노트 이하)와 “high-speed” regime(예를 들어 100노트 이상)를 식별하도록 권장한다. “low-speed” regime일 때 오작동이나 비정상 상황이 발생하면(혹은 의심되면) 이륙을 중단해야 한다. “high-speed” regime일 때에는 치명적인 오작동이나 생명을 위협하는 상황이 발생한 경우에만 이륙을 중단해야 한다. 조종사는 RTO 기동 도중 활주로를 overshoot 할 risk에 대비하여 위협을 따져봐야 한다. low-speed regime에서 high-speed regime로 전환할 때 speed call-out을 하도록 SOP(standard operating procedures)가 조정되어야 한다. 이 타이밍은 조종사로 하여금 의사 결정의 중요한 순간이 임박하였음을 상기시켜 준다. 또한 이 타이밍은 계기를 crosscheck 할, 대기 속도를 확인할, 그리고 적절한 이륙 추력이 설정되었는지 확인할 마지막 기회를 제공함과 동시에 “challenge and response” 절차를 통해 조종사 무력화(pilot incapacitation)를 확인하는 역할을 수행한다.
※ 다음은 Skybrary의 Checklists - Purpose and Use를 발췌한 내용이다.
특정 중요 항목들은 challenge-and-response checklist를 통해 점검되며 이때 pilot-non-flying/pilot monitoring이 점검 항목을 읽고 pilot flying이 해당 항목(예를 들어 altimeter setting, flaps position, ground spoilers arming, 등등)의 상태를 확인한다.
브레이크는 가장 효율적인 제동력을 제공한다. 그러나 rejected takeoff 도중 비행 승무원의 초기 경향은 normal after-landing braking을 사용하는 것이다. RTO 기동 도중 브레이크를 바로 사용하지 않으면 제동 거리가 길어진다. throttle을 retard하고 spoilers를 전개한 후 브레이크를 적용하는 정상 착륙 방법 대신 즉시 최대 브레이크를 적용함과 동시에 throttle을 retard 해야 하며 재빨리 spoilers와 thrust reverser를 사용해야 한다. 방향 제어를 유지하기 위해 불균등한 브레이크 압력을 적용하면 제동 효과가 저하된다. 타이어가 터지면 해당 타이어에 대한 제동 작용이 사라지며 인접 타이어들도 고장날 수 있다.
이륙 활주 도중 조종사가 go/no-go 결정을 내리는 것을 돕고 불필요한 high-speed RTO를 방지하기 위하여 일부 상업용 항공기 제조업체는 중요하지 않은 장비의 청각적(혹은 시각적) 오작동 경고가 특정 속도까지는 발생하지 않도록 하였다. 이는 조종사의 과잉 반응을 방지하며 안전한 이륙 대신 위험한 high-speed RTO 기동을 선택하는 경향을 방지한다. 실제로 성공적인 rejected takeoff는 장비의 특성의 영향을 받을 수 있다.
요컨대 rejected takeoff는 비상상황으로 인지되어야 한다. RTO의 안전은 다음을 통해 크게 향상될 수 있다:
∙takeoff decision speed에 대한 확장된 정의와 그 실질적 적용을 발전시키는 것을 목표로 SOP를 개발. 여기에는 speed regime의 전환을 식별하기 위한 점진적 callout을 포함한다.
∙향상된 CRM 훈련을 통해 비상상황과 비정상 상황에 대한 인식 증진.
∙성능 정보에 영향을 미칠 수 있는 요인들을 신중하게 고려하도록 조종사들에게 권장.
∙RTO 시연 도중 brakes, throttles, spoilers, 그리고 reverse thrust를 올바르게 사용하는 실습 교육을 확대.
∙이륙 활주도중 중요하지 않은 장비의 오작동 경고가 특정 속도까지는 작동하지 않도록 항공기 제조업체에게 권장.
Rotation and Lift-Off
제트 비행기의 rotation and lift-off는 계획적이고 정교한 조종간 입력을 필요로 한다. 그 목표는 VR에서 이륙 자세로 rotation을 시작하여 VLOF로 가속한 다음 35ft AGL에서 V2를 달성하는 것이다. 이륙 자세를 향하여 너무 일찌감치 rotate를 수행하면 이륙 활주가 길어지거나 일찌감치 부양하여 상승률이 낮아지고 예상 비행경로로부터 벗어날 수 있다. 반면 rotation이 늦어지면 이륙 활주가 길어지고 V2가 초과되며 이륙 및 상승 경로가 예상 비행경로보다 낮아진다.
모든 비행기는 특정 이륙 자세를 가지고 있으며 이는 무게에 관계없이 일정하게 유지된다. 제트 비행기의 이륙 자세는 보통 10 ~ 15도 사이이다. rotation은 일정한 비율로 부드럽게 수행되어야 한다. 비행기에 따라 조종사는 초당 약 2.5 ~ 3도의 pitch 자세 증가율을 계획해야 한다.
훈련 도중 조종사가 VR과 V2를 overshoot 하는 것은 일반적이다. 왜냐하면 VR이 막 지났을 때 pilot not flying이 rotation을 call-out 하기 때문이다. pilot flying은 VR을 직접 확인한 다음 rotate를 늦게 시작할 수 있다. 정상 이륙 도중에는 비행기가 V2 이상의 속도에서 지면을 떠났다 하더라도 문제가 없을 수 있다. 그러나 활주로 길이나 장애물이 제한되어 있을 때 rotation이 지연되면 위험할 수 있다. 일부 비행기에서는 급격하게 증가하는 비행 속도로 인해 정확한 속도로 비행되지 않는 한 비행경로가 engine-out scheduled flightpath보다 낮아질 수도 있다. 올바른 속도에서 올바른 증가율로 올바른 자세를 만들어야 올바른 속도 및 올바른 거리에서 비행기가 지상으로부터 이륙할 수 있다.
Initial Climb
올바른 pitch가 설정되었다면 이를 유지해야 한다. 이륙 출력 또한 계속 유지되어야 하며 속도가 증가해야 한다. positive rate of climb이 설정 및 확인되었다면 landing gear를 올려야 한다. 일부 비행기에서는 gear를 올릴 때 landing gear doors가 열리면서 항력이 순간적으로 증가할 수 있다. 이 경우 gear를 너무 일찌감치 올리면 비행기가 활주로 표면에 다시 안착할 수 있다. 또한 비행기가 활주로로부터 35 ~ 50ft까지 상승하기 전까지는 지면효과로 인해 positive climb이 VSI와 고도계에 표시되지 않을 수 있다.
조종사는 비행기가 flap retraction speed로 가속하는 동안 상승 자세를 유지해야 한다. 그러나 장애물 회피 고도나 400ft AGL을 통과하기 전에 flaps를 올려선 안 된다. 지면 효과와 항력 감소(landing gear up)로 인해 이 구간에서는 가속이 빠르다. 대기 속도, 고도, 상승률, 자세, 그리고 heading을 주의 깊게 확인해야 한다. 비행기가 안정적으로 상승하게 되면 조종간 압력이 trim 될 수 있다. 출력 감소를 수행하는 경우에는 필요에 따라 pitch를 동시에 줄여줘야 한다. 그리고 의도치 않은 성능 감소나 하강이 발생하지 않도록 대기속도와 상승률을 확인한다.
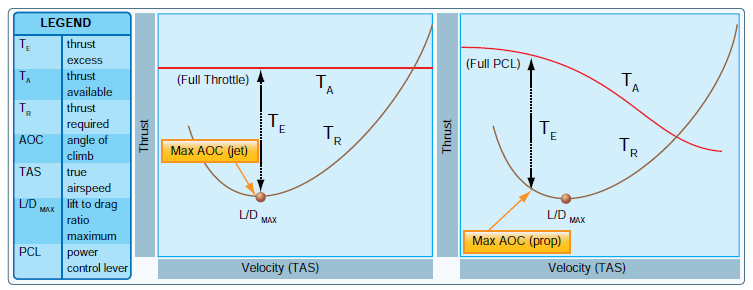
미국의 경우 Administrator가 달리 승인하지 않는 한 10,000ft MSL 미만에서는 속도가 250KIAS로 제한된다(14 CFR part 91, section 91.117(a)). 해당 고도 이상에서의 best rate of climb speed가 AFM에 게재되어 있다. 상승률을 높이도록 요청받았다면 pitch를 약간 높였을 때 속도가 줄어들면서 원하는 효과를 얻을 수 있다. 여기서 속도가 L/D MAX로 줄어들면 비행기는 best angle of climb speed에 놓인다. 이 속도에서의 상승률은 best rate of climb speed보다 낮다. 속도를 고도와 일시적 상승률로 전환하는 것을 “zoom climb”라 부른다. 이러한 유형의 상승은 수천피트 동안 상승률을 증가시킨다. 허나 궁극적으로는 전반적 상승 성능을 감소시킨다.
※ 다음은 항공안전법 시행규칙 제 169조(비행속도의 유지 등)를 발췌한 내용이다(시행 2024.3.13).
① 법 제67조에 따라 항공기는 지표면으로부터 750미터(2,500피트)를 초과하고, 평균해면으로부터 3,050미터(1만피트) 미만인 고도에서는 지시대기속도 250노트 이하로 비행하여야 한다. 다만, 관할 항공교통관제기관의 승인을 받은 경우에는 그러하지 아니하다.
② 항공기는 별표 23 제1호에 따른 C 또는 D등급 공역에서는 공항으로부터 반지름 7.4킬로미터(4해리) 내의 지표면으로부터 750미터(2,500피트)의 고도 이하에서는 지시대기속도 200노트 이하로 비행하여야 한다. 다만, 관할 항공교통관제기관의 승인을 받은 경우에는 그러하지 아니하다.
③ 항공기는 별표 23 제1호에 따른 B등급 공역 중 공항별로 국토교통부장관이 고시하는 범위와 고도의 구역 또는 B등급 공역을 통과하는 시계비행로에서는 지시대기속도 200노트 이하로 비행하여야 한다.
④ 최저안전속도가 제1항부터 제3항까지의 규정에 따른 최대속도보다 빠른 항공기는 그 항공기의 최저안전속도로 비행하여야 한다.
'Airplane Flying Handbook(2021) > 16: Transition to Jet-Powered Airplanes' 카테고리의 다른 글
| (12) Thrust Reversers (0) | 2023.06.03 |
|---|---|
| (13) Pilot Sensations in Jet Flying (0) | 2023.06.03 |
| (15) Jet Airplane Descent and Approach (0) | 2023.06.03 |
| (16) Jet Engine Landing (1) | 2023.06.03 |
| (17) Jet Airplane Systems and Maintenance (0) | 2023.06.03 |