Jet Engine Landing
14 CFR part 25, section 25.125는 제트 비행기의 착륙에 필요한 수평 거리를 규정한다. 이 규정은 착륙 표면으로부터 50ft 지점에서 착륙 및 완전 정지에 필요한 수평 거리를 landing profile이라 설명한다. 제조업체는 표준 기온에서의 dry · level runway로부터 landing distance를 결정한다(단, thrust reversers, auto brakes, 혹은 auto-land systems를 사용하지 않는 것을 기준으로 함). 조종사는 AFM 정보를 기반으로 착륙 무게와 환경 조건에 대해 예상되는 실제 착륙 조건을 결정한다. dry runway에 착륙하는 조종사는 보통 40%의 cushion을 더한다. 사용 가능한 활주로의 길이를 1.67로 나눈 값은 AFM에서 계산된 landing distance 이상이어야 한다. wet runway의 경우에는 거리를 15% 더 늘려야 한다. [그림 16-16]
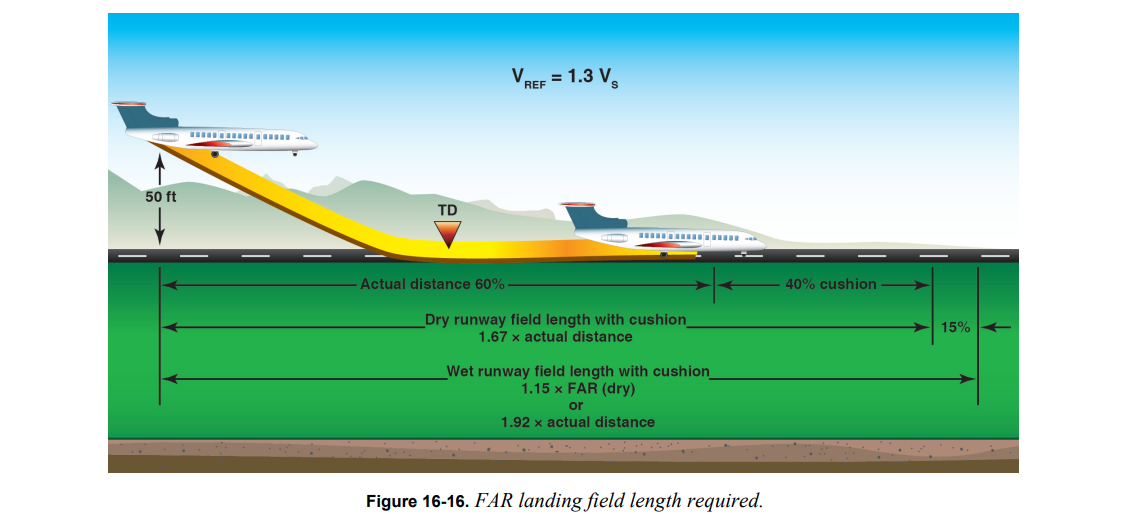
간단히 말해 조종사는 착륙을 위해 사용할 수 있는 최소 거리를 결정하기 위해 활주로의 길이를 1.67이나 1.92로 나눈다. 이러한 안전 여유와 함께 minimum dry runway field length는 actual distance보다 최소 1.4배 길어야 하고 minimum wet runway landing field length는 actual distance보다 최소 1.61배 길어야 한다. 신중한 비행 계획을 통해 조종사는 안전 여유를 유지함과 동시에 특정 활주로에 대해 운반할 수 있는 연료, 승객, 혹은 화물의 하중을 결정할 수 있다. 목적지에 따라 안전 여유를 위해 하중을 제한해야 할 수도 있다. 이는 종종 복잡한데 왜냐하면 연료 하중이 자체적으로 안전에 영향을 미치기 때문이다.
certified landing field length 조건은 speed brakes와 maximum wheel braking이 사용된 제동에 대해 계산된다. reverse thrust는 certified landing distance를 설정하는데 사용되지 않는다. 허나 reversers를 사용할 수 있다면 반드시 사용해야 한다.
※ 다음은 대한항공 PERFORMANCE 교재를 발췌한 내용이다.
4. RUNWAY CONDITION
1) Dry
Runway 상에 수분이 없는 상태. Groove 나 수분 흡수 표면처리 강화가 제대로 유지되고 있는 활주로는 Runway 상태가 Wet 인 조건에서도 Braking Action 이 Dry Runway 와 거의 비슷하게 제공된다. Jeppesen 10-9A, 20-9A 또는 11-1 Airport Diagram 에서 Grooving 이나 Porous Friction Course Pavement 설치 상태를 알 수 있다.
2) Damp
활주로에 수분이 존재하지만 (Water Spot, 표면의 수분에 의한 변색) 충분히 젖어 있지 않는 상태이다.
3) Wet
활주로가 완전히 젖어있고, 표면이 반사되며, 물이 3mm (1/8inch) 미만의 깊이로 존재하는 상태이다.
· 다음의 경우에는 활주로 상태를 Wet로 간주하여야 한다.
- 비가 지속적으로 내리고 있는 상태 (Light/Moderate Rain)
- 비가 오다가 그쳤더라도 활주로가 젖어 있고 표면이 반사되는 상태
· Wet Equivalent
3mm (1/8inch) 미만의 Water 에 해당되는 Slush, Wet Snow, Dry Snow를 Wet Equivalent로 간주하여 Wet Runway 와 동일한 Performance를 적용한다.
4) Contaminated
· 사용되는 활주로 표면의 25% 이상이 상기 Wet 또는 Wet Equivalent 상태를 초과하는 Depth의 standing water/ Slush/Wet Snow/Dry Snow로 덮여있는 상태이다.
· Contaminated 조건에서는 항공기의 가속 그리고 감속성능이 둘 다 저하된다. 따라서 Contaminated 조건에서는 전형적인 Contaminant Depth 에 의한 Performance를 적용한다. Contaminated Runway로 의심되지만 Braking Action 만 보고될 때에는 기장은 가능한 모든 정보를 이용하여 Contaminant Depth를 예측 하여야 한다.
· 폭우 (Heavy Rain) 는 Contaminated Runway 상태로 간주한다.
참고) 특정 상황에서는 활주로를 contaminated runway로 간주하는 것이 적절할 수 있다: 예를들어 standing water나 slush가 이륙 초기에 존재하지 않고 부양 지점이나 고속으로 이륙 활주를 진행하는 부분에 위치한다면 이륙 성능이 더 크게 감소할 수 있다.이러한 상황에서는 활주로를 "wet" runway가 아닌 "contaminated" runway로 간주할 수 있다. (FAA AC 25-13 참조)
5) Slippery
· 활주로 말단 2/3, 즉 Braking 적용 지점에 Ice 또는 Compacted Snow 가 존재하는 상태이다.
· Slippery Runway 에서 가속은 영향을 받지 않는 것으로 가정한다. 이 경우에는 해당 활주로의 조건 또는 보고된 Braking Action에 따른 Performance를 적용한다.
· Wet runway, compacted snow covered runway, 그리고 icy runway는 slippery runway에 포함된다. 이륙 성능을 계산하기 위해선 reported braking action이 필요하다.
Landing Speeds
제트 비행기로 착륙을 수행할 때 고려해야 하는 특정 속도가 있다. 그 속도들은 다음과 같다:
∙VS0 – 착륙 외장에서의 실속 속도.
∙VREF – 착륙 외장에서의 실속 속도에 1.3을 곱한 것.
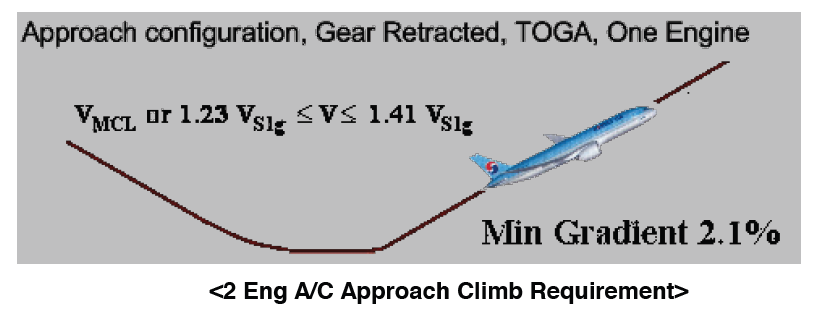
∙Approach climb – 엔진이 작동하지 않는 상태에서 복행을 수행할 때 충분한 성능이 보장되는 속도.
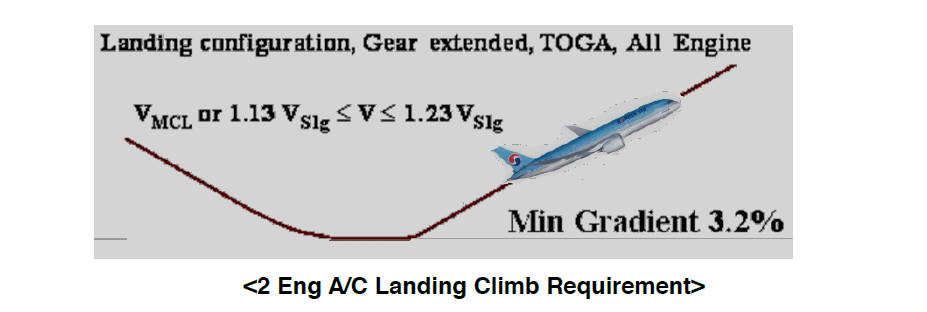
∙Landing climb – 착륙의 최종 단계를 진행하다가 하강을 중단하고 복행을 수행할 때 충분한 성능이 보장되는 속도(이때 항공기는 완전한 착륙 외장 상태이며 모든 엔진에서 최대 이륙 출력을 이용할 수 있음).
※ 다음은 대한항공 PERFORMANCE 교재를 발췌한 내용이다.
1. APPROACH CLIMB
1) Condition (One engine inoperative, Gear retracted, TOGA thrust, Climb Gradient 2.1%)
approach climb은 landing configuration이 아닌 approach climb configuration을 기준으로 한다. approach climb은 접근 초기에 수행될 수 있으므로 landing gear가 올려져 있고 flaps가 approach position에 놓여있다 가정한다. 복행이 시작될 때 한 쪽 엔진이 작동하지 않고 남은 한 쪽 엔진이 go around thrust에 놓여있다 가정한다.
2) Go Around Performance
2. LANDING CLIMB(Normal Go-Around)
1) Condition (All engine operating, Gear extended, Landing configuration)
Landing climb은 landing climb configuration을 기준으로 한다. 이는 비행기가 착륙을 위해 완전히 외장된 상태로 final approach를 진행하던 도중 실패 접근을 수행하는 경우를 대비하기 위해 필요하다. 이 경우에는 모든 엔진이 작동하고 있다 가정한다. 그리고 복행을 위해 throttle을 전진시키고 8초가 지난 후에 사용할 수 있는 추력으로 작동된다 가정한다. landing gear는 내려져 있다 간주되며 flaps는 landing position에 놓여있다. 속도는 해당 외장에서의 VREF를 초과하지 않는다 가정한다.
2) Landing Climb Performance
비행기는 landing climb requirement라 불리는 특정 minimum gradient(3.2%)를 충족할 수 있어야 한다.
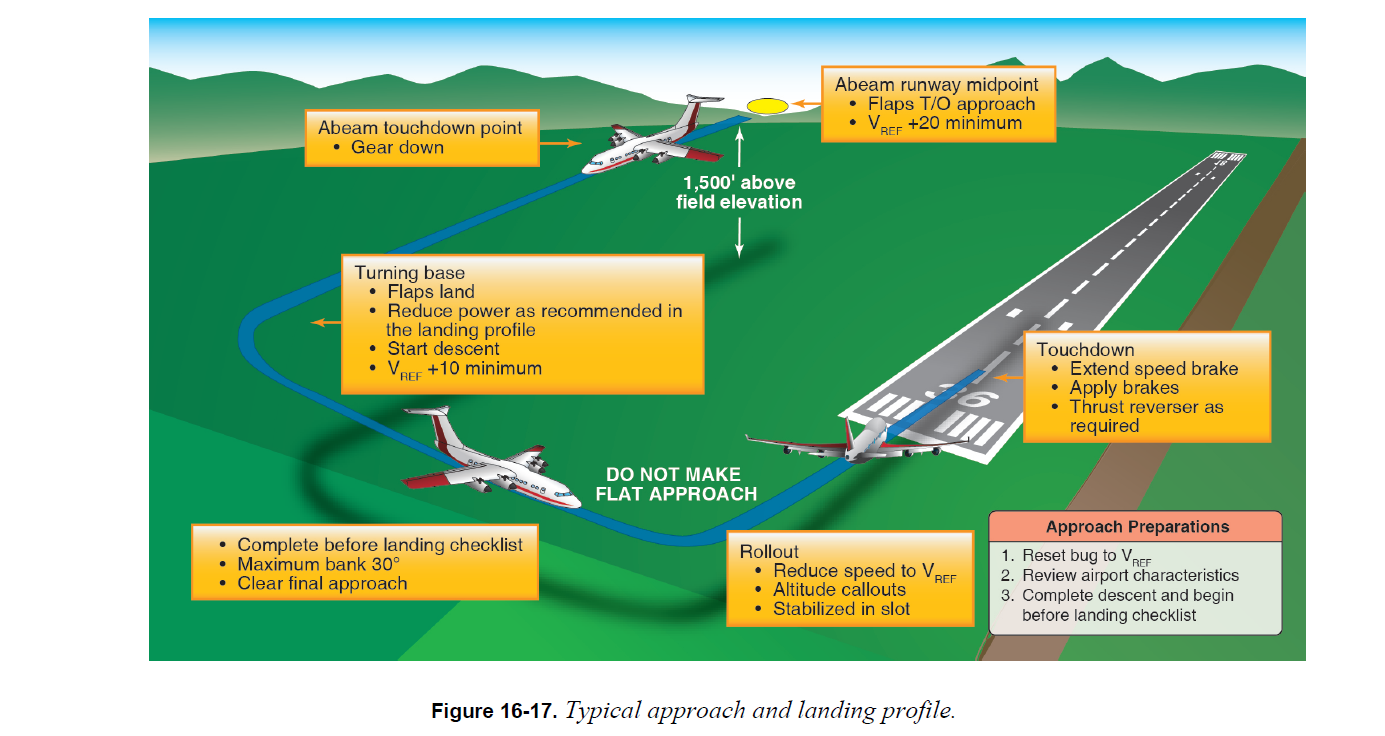
조종사는 교통 장주(traffic pattern)를 비행해야 할 수도 있다. 조종사는 교통 장주를 기동하는 동안 VREF와 관련하여 final approach target speed까지 감속하기 전까지는 제조업체가 권장하는 속도를 사용해야 한다. 매 착륙마다 이 속도가 계산되어야 하며 두 조종사가 모두 볼 수 있는 곳에 배치되어야 한다.
제트 비행기의 접근 및 착륙 순서는 특정 비행기에 대해 개발된 approach and landing profile에 따라 수행되어야 한다. [그림 16-17]
Significant Differences
어떠한 형식의 비행기이든 안전한 접근은 활주로 시단에서의 특정 위치, 속도, 그리고 높이에서 달성된다. 이러한 최종 비행 조건은 모든 접근이 목표로 하는 target window이다. 프로펠러 비행기는 해당 window를 넓은 각도, 큰 속도 차이, 그리고 다양한 glidepath 각도로 접근할 수 있다. 허나 제트 비행기는 출력 수정과 경로 수정에 바로 반응하지 않기 때문에 final approach를 보다 안정적이고 신중하고 일정하게 수행해야 window에 정확하게 도달할 수 있다.
제트 비행기의 훌륭한 성능에도 불구하고 해당 비행기로 접근을 수행하는 것과 접근 오차를 수정하는 것은 피스톤 비행기보다 더 어렵다. 여기에는 여러 가지 이유가 있다.
∙ 특정 속도에서 즉시 추가 양력을 발생시켜주는 propeller slipstream이 없다. 급격히 출력을 증가한다 하여 glidepath 아래에서 상승할 수 없다. 양력을 더 발생시키기 위해선 기체를 가속해야 한다.
∙ power-on-stall speed를 낮춰주는 propeller slipstream이 없다. power-on stall speed와 power-off-speed 사이에는 사실상 차이가 없다. 제트 비행기에서는 실속을 피하기 위해 thrust levers를 증가시키는 것이 불가능하다.
(ATP: 제트 비행기에서는 propeller slipstream이 없으므로 power on이든 power off이든 실속에 빠지는 받음각이 동일하다.)
∙ 제트 엔진은 낮은 rpm에서 반응이 더 느리다. 때문에 final에서 안정적인 속도 및 출력 설정으로 접근을 수행해야 필요할 때마다 충분한 력을 사용할 수 있다.
∙ 제트 비행기는 크기가 비슷한 프로펠러 비행기보다 무거우며 접근 속도가 빠르다. 때문에 속도 변화나 경로 수정을 위한 가속도를 극복하기 위해선 더 큰 힘이 필요하다. 이로 인해 제트 비행기는 보통 프로펠러 비행기보다 반응이 느리므로 접근 도중 신중한 계획 및 안정적 조건이 필요하다.
∙ 제트 비행기는 속도가 증가하거나 감소한 후에 원래의 속도로 되돌아가려는 경향을 거의 보이지 않는다. 속도를 유지하기 위해선 조종사가 신속하게 속도를 조정해야 한다.
∙ 저속에서는 항력이 양력보다 빠르게 증가하여 높은 침하율을 발생시킨다. 접근 외장에서 제트 비행기의 날개는 보통 항력을 크게 증가시킨다. 침하율이 커졌을 때 이를 즉시 해결할 수 있는 방법은 pitch 자세(받음각)를 증가시키는 것이다. 항력이 양력보다 더 빠르게 증가하기 때문에 상당한 양의 력이 즉시 적용되지 않는 한 pitch의 변화로 인해 더 큰 침하율이 발생한다.
제트 비행기의 이러한 비행 특성들은 stabilized approach를 절대적으로 필요하게 만든다.
Stabilized Approach
AFM에 포함된 performance charts와 limitations는 특정 속도 및 무게에서 발생하는 가속도를 기반으로 한다. runway length limitations는 항공기가 1.3 VS0 속도에서 시단으로부터 50ft 상공을 통과한다는 것을 가정한다. 이러한 “window”는 매우 중요하며 stabilized approach의 주된 이유이다. 또한 성능 값들은 비행기가 target touchdown zone(활주로로부터 대략 1,000ft 지점)에서 착륙한 후에 최대 제동을 사용하였다 가정한다.
stabilized approach의 기본 요소들은 다음과 같다:
∙접근 도중 1,000ft AGL 전까지는 착륙 외장 상태에 있어야 한다. landing gear를 내리고, landing flaps를 선택하고, trim을 설정하고, 연료 균형을 맞추어야 한다. 이러한 작업이 완료되었다면 final approach 도중 변수들이 최소화될 수 있다.
∙1,000ft 아래로 하강하기 전에 비행기가 profile에 놓여 있어야 한다. 비행기가 threshold window에 가까워졌을 때 주의가 산만해지지 않기 위해선 접근 초기에 외장, trim, 속도, 그리고 glidepath를 최적의 매개변수 근처로 만들어야 한다. 최적의 glidepath angle(대략 3도)이 설정 및 유지되어야 한다.
∙500ft AGL 전까지는 지시 속도가 target airspeed로부터 0 ~ +10노트에 있어야 한다. 대부분의 제트 비행기에서 속도는 trim과 power 사이에 밀접한 관계를 가진다. 때문에 이러한 변수들을 최소화하기 위해 속도를 안정화시키는 것이 중요하다.
∙최적의 하강률은 ground speed에 따라 달라진다. 하강률을 위한 rule of thumb는 ground speed의 절반에 10을 곱하는 것이다. 예를 들어 130노트의 ground speed에서는 650 fpm의 하강률이 필요하다. 보통 하강률은 500 ~ 700 fpm으로 계산된다. 과도한 하강률은 접근에 문제가 있음을 나타낼 수 있다.
모든 접근은 500ft 지점에서 평가되어야 한다. 일반적인 제트 비행기의 경우 이 지점은 대략 touchdown으로부터 1분 거리에 있다. 이 지점에서 접근이 안정화되어있지 않다면 복행을 수행해야 한다. [그림 16-18]

Approach Speed
final approach 도중 어떤 속도의 편차도 즉시 확인 및 수정되어야 한다. 경험을 통해 조종사는 airspeed trend의 증감이 시작되는 것을 감지할 수 있으며 이는 보통 미세한 조정을 통해 수정될 수 있다. 조종사는 반드시 대기 속도가 VREF 미만으로 떨어지지 않도록 해야 하며 그렇지 않으면 높은 침하율이 발생할 수 있다. 침하율이 증가하는 것이 감지되었다면 받음각을 증가시킴과 동시에 추력을 증가해야 한다. 수정량은 침하율을 얼마나 줄여야 하는지에 따라 달라진다. 줄여야 하는 침하율의 양이 적은 경우에는 부드러운 수정만으로도 충분하다. 줄여야 하는 침하율의 양이 큰 경우에는 과감한 수정 조작이 필요하며 설령 수정에 성공하더라도 접근이 불안정해질 수 있다.
접근을 수행하는데 있어 일반적인 실수는 과도한 접근 속도이다. 과도한 속도로 threshold window를 통과하면 최소 제동 거리가 증가한다. dry runway의 경우 1노트 당 20 ~ 30ft가, 그리고 wet runway의 경우 1노트 당 40 ~ 50ft가 증가한다. 더 나쁜 것은 과도한 접근 속도로 인해 flare가 연장될 가능성이 높아져서 touchdown이 1노트 당 약 250ft 씩 증가한다는 것이다.
final approach 도중 속도를 올바르게 제어하는 것은 매우 중요하다. 조종사는 약간의 속도 조절만이 필요하도록, 그리고 비행기가 정확한 속도로 threshold window에 도달하도록 해야 한다.
Glidepath Control
최적의 glidepath angle은 대략 3도이다. 시계 접근 도중 조종사가 flat approaches를 수행하려는 경향이 있을 수도 있다. 그러나 flat approach는 착륙 거리를 증가시키므로 피해야 한다. 예를 들어 3도의 권장 각도 대신 2도의 접근 각도를 사용하면 착륙 거리가 500ft 증가한다.
보다 일반적인 실수는 시단을 과도한 높이로 통과하는 것이다. 이는 unstable approach를 수행하였을 때, 혹은 비록 안정적이지만 높은 접근을 수행하였을 때 발생한다. 또한 이는 missed approach point가 시단 근처에 놓인 비정밀 접근을 수행할 때에도 발생할 수 있다. 그 원인과 상관없이 시단을 과도한 높이로 통과하면 정상적인 aiming point 너머에서 착륙하게 될 가능성이 높다. 시단으로부터의 높이에 50ft가 더해지면 착륙 거리가 약 1,000ft 증가한다. 비행기는 정확한 고도(활주로로부터 50ft)에서 threshold window에 도달해야 한다.
The Flare
flare를 통해 항공기는 접근 하강률에서 착륙에 적절한 하강률로 감소된다. 소형 비행기는 감속 도중 지면을 “hold off” 해야 하지만 제트 비행기는 활주로에 착지하도록 비행되어야 한다. 제트 비행기는 착륙 외장에서도 공기역학적으로 clean 하며 엔진은 idle rpm에서도 추력을 생성한다. 따라서 부드러운 착륙을 위해 flare 도중 hold off를 유지하면 착륙 거리가 크게 증가한다. 제트 비행기에서는 firm landing이 일반적이며 적절하다. firm landing은 hard landing을 의미하지 않는다. 대신 이는 의도적인 착륙을, 혹은 확실한 착륙을 의미한다.
대부분의 공항에서 landing gear는 end of the runway를 30 ~ 45ft 상공(landing flaps 설정과 touchdown zone 위치에 따라 다름)에서 통과한다. 비행기가 end of the runway를 지나 착지하기 전까지 5 ~ 7초가 걸린다. landing gear가 활주로로부터 약 15ft에 있을 때 하강률을 100 ~ 200 fpm으로 줄일 수 있을 정도로 pitch를 높여서 flare를 시작한다. 이를 위해선 대부분의 제트 비행기에서 pitch를 1 ~ 3도만 높여야 한다. flare가 진행됨에 따라 추력을 부드럽게 idle로 줄인다.
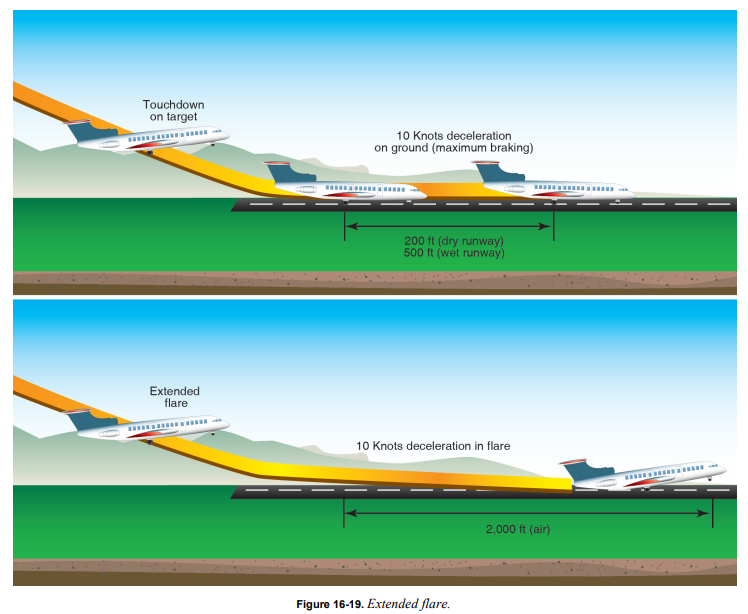
end of the runway로부터 touchdown까지 진행하는 도중에는 속도가 불과 몇 노트만 감소한다. flare 도중 추력이 감소되었을 때 대부분의 감속이 발생한다. 속도가 더 감소하는 도중 flare가 연장된다면(hold off) 된다면 수백, 혹은 수천 피트의 활주로가 사용될 수도 있다. [그림 16-19] 또한 flare가 연장되면 pitch 자세가 더 증가하여 tail strike가 발생할 수도 있다. 따라서 target touchdown point에서 안착하도록 비행하는 것이 필수적이다(설령 속도가 많다 하더라도). 매 비행 시 의도적인 touchdown을 계획 및 연습해야 한다. 확실한 touchdown은 flare가 연장되는 것을 방지하는데 도움이 된다.
조종사는 본인이 비행하는 모델의 flare 특성을 배워야 한다. 각 비행기에서 확인되는 시각 참조물은 다르다. 왜냐하면 창문의 기하학적 구조와 가시성이 다르기 때문이다. 조종사의 눈과 landing gear 사이의 기하학적 관계는 각 모델마다 다르다. flare가 적절한 높이(너무 높지도 너무 낮지도 않은 높이)에서 시작되는 것은 매우 중요하다.
flare를 너무 높은 곳에서 시작하면 비행기가 target touchdown point를 지나서 floating 할 수 있다. 추력을 너무 일찍 줄이면 과도한 침하율을 막기 위해 급격한 pitch up을 수행할 수 있으며 이는 tail strike로 이어질 수 있다. flare가 너무 늦게 시작되면 hard touchdown이 발생할 수도 있다.
flare 도중 추력을 적절하게 관리하는 것 또한 중요하다. 많은 제트 비행기에서 추력 설정 변경은 pitch trim에 상당한 영향을 미친다. 추력 설정의 급격한 변화는 빠른 elevator 반응을 필요로 한다. flare 도중 thrust levers를 idle로 너무 빠르게 줄이면 pitch를 급격하게 조정해야 할 수 있다. thrust levers를 천천히 움직일수록 elevator를 더 쉽게 조정할 수 있다.
Touchdown and Rollout
올바른 approach and flare는 비행기가 touchdown target zone(보통 활주로 시단으로부터 대략 1,000ft 지점)에 착륙하도록 위치시킨다. main wheels가 활주로에 닿으면 조종사는 방향 제어를 유지해야 한다. 그리고 남은 활주로에서 제동 과정을 시작한다. 착륙이 목표 지점에서 이루어졌다면 제동을 위한 runway distance available이 가장 길다. 만약 초과 속도가 없었다면 소멸되어야 할 에너지가 최소이다.
비행기는 빠른 속도로 움직이는 매우 큰 질량 덩어리이다. 매우 큰 총 에너지는 브레이크, 공기역학적 항력, 그리고 thrust reversers(사용 가능한 경우)를 통해 소멸된다. 착륙 후에 nose-wheel을 즉시 지면으로 낮추어야 한다. 왜냐하면 제트 비행기로 nose-high attitude를 유지하면 감속에 좋지 않기 때문이다. 그리고 nose-wheel tires가 지면에 닿으면 방향 제어를 유지하는데 도움이 된다. nose gear를 낮추면 날개 받음각이 감소하고, 양력이 감소하며, 더 많은 부하가 타이어에 걸린다. 이는 타이어와 지면 사이의 마찰을 증가시킨다. 제트 비행기를 위한 landing distance charts는 착륙 후 4초 이내에 nose-wheel이 활주로로 낮춰졌다고 가정한다.
비행기를 제동하는데 사용할 수 있는 세 가지 힘은 다음과 같다: wheel braking, reverse thrust, 그리고 aerodynamic braking. 세 가지 중에서 브레이크가 가장 효율적이다. 따라서 이는 대부분의 착륙에 대해 가장 중요한 제동 요소이다. 활주로가 매우 미끄럽다면 reverse thrust와 aerodynamic brake가 지배적인 요소가 될 수 있다. reverse thrust와 aerodynamic drag는 고속에서 가장 효율적이다. 이 둘은 활주로 표면 상태의 영향을 받지 않는다. 반면 브레이크는 저속에서 가장 효율적이다. landing rollout distance는 touchdown speed, 제동에 적용된 힘, 그리고 이러한 힘이 적용된 시기에 따라 달라진다. 조종사가 제동에 적용될 힘과 이러한 힘이 적용될 시기를 제어하긴 하지만 최대 제동력이 타이어와 지면 사이의 마찰에 의해 제한될 수도 있다.
착지 후에 최대한 빨리 제동을 시작해야 한다. 그리고 항공기가 정지하거나 safe taxi speed에 도달하기 전까지 부드럽게 제동을 계속한다. 단, 비행기에 anti-skid system이 장착되어 있지 않다면 주의해야 한다. 왜냐하면 강한 제동으로 인해 바퀴가 잠겨서 타이어가 미끄러질 수도 있기 때문이다.
방향 제어와 브레이크 제동은 모두 타이어 지면 마찰을 사용한다. 이들은 타이어가 제공할 수 있는 최대 마찰력을 공유한다. 둘 중 하나가 증가하면 다른 하나가 감소된다. 타이어 지면 마찰, 활주로 오염이 지면 마찰에 미치는 영향, 그리고 마찰을 최대한 활용하는 방법을 이해하는 것이 중요하다.
착지 후에 spoilers가 바로 전개되어야 한다. 왜냐하면 spoilers는 고속에서 가장 효율적이기 때문이다. 시기적절하게 spoilers를 사용하면 항력이 크게 증가한다. 허나 더 중요한 것은 spoilers가 날개 양력의 상당 부분을 없애버리는 것이다. 이는 비행기의 무게가 바퀴에 더 많이 실리게 만든다. spoilers는 바퀴 하중을 증가시켜서 타이어 지면 마찰력을 증가시킨다. 이는 최대 타이어 제동력을 사용할 수 있게 만든다.
thrust reverser는 spoilers와 마찬가지로 고속에서 가장 효율적이다. 이는 착지 후에 즉시 전개되어야 한다. 그러나 nose-wheel 이 지면에 닿기 전까지는 상당한 양의 reverse thrust를 사용하지 않아야 한다. reversers가 비대칭으로 전개되어 제어 불가능한 yaw가 발생하였다면 조종사는 방향 제어를 유지하기 위해 최대한 nose-wheel steering을 조작해야 한다. 활주로 길이가 충분하다면 idle reverse thrust를 사용하는 것이 적절할 수 있다.
'Airplane Flying Handbook(2021) > 16: Transition to Jet-Powered Airplanes' 카테고리의 다른 글
| (13) Pilot Sensations in Jet Flying (0) | 2023.06.03 |
|---|---|
| (14) Jet Airplane Takeoff and Climb (1) | 2023.06.03 |
| (15) Jet Airplane Descent and Approach (0) | 2023.06.03 |
| (17) Jet Airplane Systems and Maintenance (0) | 2023.06.03 |
| (18) Chapter Summary (0) | 2023.06.03 |