실속은 양력의 급격한 감소로 인해 발생한다. 이는 임계 받음각이 초과될 때 발생하는 날개 표면의 공기 흐름 분리가 원인이다. 실속은 pitch attitude나 airspeed와 관계없이 발생할 수 있다. 실속은 공기역학에서 오해가 많은 분야 중 하나이다.왜냐하면 몇몇 조종사들은 에어포일이 실속에 빠졌을 때양력 생산을 중단한다고 믿기 때문이다. 실속 도중 날개는 양력 생산을 완전히 중단한다기보다는 수평 비행을 유지할 정도의 충분한 양력을 생산할 수 없게 된다.
양력계수는 받음각에 비례한다. 허나 특정 시점에서 양력계수는 최고점에 도달했다가 떨어지기 시작한다. 이러한 최고점을 최대 양력계수(CL-MAX)라 부른다. 최대 양력계수나 임계 받음각이 초과된 후 날개가 생성하는 양력의 양은 급격하게 감소된다. 그러나 앞서 언급한 바와 같이 양력 생성을 완전히 중단하지는 않는다.
대부분의 직선익(straight-wing) 항공기 날개는 wing root가 먼저 실속에 빠지도록 설계된다. wing root가 먼저 임계 받음각에 도달하기 때문에 실속이 wingtip을 향해 바깥으로 진행되며wingtips의 aileron effectiveness가 유지된다. 이는 항공기의 조종성을 유지시켜준다. wing root가 먼저 실속에 빠지도록 만들기 위하여 다양한 설계 방법이 사용된다. 하나의 설계는 wing root를 더 높은 받음각으로 “twist” 하는 것이다. 날개 앞전의 20 ~25% 지점에 stall strips를 설치하는 것 또한 실속을 빠르게 발생시키는 또 다른 방법이다.
(Wash out wing. 출처: boldmethod. wash out의 원리가 궁금하다면? 그림 클릭.)(Stall strips. 출처: boldmethod. stall strips의 원리가 궁금하다면? 그림 클릭.)
실속 상태에서 날개는양력 생산을 완전히 중단하지 않는다. 만약 그랬다면 항공기는 지구로 떨어질 것이다. 대부분의 훈련 항공기는 실속 도중 항공기의 기수가 떨어지도록 설계된다. 이는 받음각을 감소시키고 날개를 실속으로부터 회복시킨다. 이러한 nose-down tendency는CL이 CG의 뒤에 있기 때문에 발생한다. CG range는 실속 회복 특성에 있어 매우 중요하다. 만약 항공기가 CG range 밖에서 운영되면 조종사가 실속을 회복하는데 어려움을 겪을 수 있다. 특히 CG가 후방 한계를 초과할 때 가장 위험하다. 이때 조종사는 받음각을 감소시키기 위한 elevator 힘을 만들어내지 못할 수 있다. 이 경우 항공기는 지면에 충돌하기 전까지 실속 상태를 유지한다.
실속 속도는 모든 비행 상황에 대해 고정된 값이 아니다. 허나 항공기는 대기속도, 무게, 하중, 혹은 밀도 고도에 관계없이 항상 동일한 받음각에서 실속에 빠진다. 모든 항공기는 실속에 진입하는 단 하나의 특정 받음각을 가진다. 이러한 실속 받음각은 항공기 설계에 따라 약 16 ~20도까지 다양하다.
(ATP:실속 속도는 bank angle, 무게, 하중, 그리고 출력 등등의 영향을 받는다. 그러나 받음각이나 공기 밀도의 영향은 받지 않는다.)
(ATP: 난기류는 안정적인 조건의 항공기보다 훨씬 높은 속도에서 실속에 빠질 수 있게 만든다. vertical gust나 wind shear는 상대풍의 급격한 변화를 유발할 수 있다. 이로 인해 받음각이 갑자기 증가하여 실속이 발생할 수 있다. 실속을 발생시킬 만큼 돌풍이 오래 유지되지 않는다. 허나 조종사가 비행경로를 제어하려 시도한다면 실속이 발생할 수도 있다(특히 접근 도중)).
임계 받음각이 초과되는 비행 상황에는 보통 세 가지가 있다: 저속, 고속, 그리고 선회.
직진수평비행 도중 항공기가 실속에 빠질 수 있는 한 가지 방법은 저속으로 비행하는 것이다. 대기 속도가 감소할 경우 고도 유지에 필요한 양력을 발생시키기 위해 받음각을 늘려야 한다. 속도가 낮아질수록 받음각은 더 증가해야 한다. 결국 날개가 항공기를 지탱하기에 충분한 양력을 생산하지 못하는 받음각에 도달하면 항공기가 가라앉기 시작한다. 여기서 속도가 더 줄어들면 항공기는 실속에 빠진다. 왜냐하면 받음각이 임계 받음각을 초과하여 날개 위의 공기 흐름이 붕괴되기 때문이다.
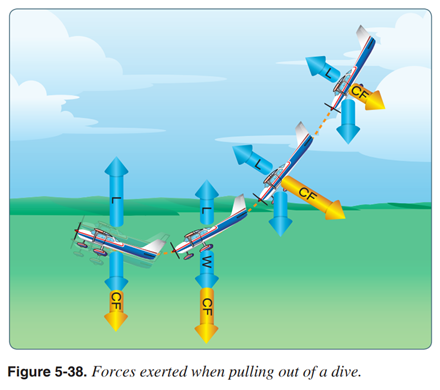
허나 날개는 어떠한 속도에서도 과도한 받음각에 진입할 수 있다. 예를 들어 100노트로 하강하던 도중 조종사가 elevator control을 급격하게 당겼다. [그림 5-38] 중력과 원심력은 비행경로의 즉각적인 변화를 방해한다. 허나 항공기의 받음각은 꽤나 낮은 상태에서 높은 상태로 급격하게 변화한다. 다가오는 공기에 대한 항공기의 비행경로가 상대풍의 방향을 결정하기 때문에 받음각이 갑자기 증가한다. 항공기는 정상적인 실속 속도보다 훨씬 높은 속도에서 실속 받음각에 도달할 것이다.
수평 선회 실속 속도는 직진수평비행 실속 속도보다 높다. [그림 5-39] 선회 도중 항공기의 무게에 원심력이 추가된다. 따라서 날개는 원심력과 무게에 의해 가해지는 하중을 상쇄하기 위해 추가 양력을 발생시켜야 한다. 선회 도중 추가 양력은 back pressure를 통해 얻어진다. 이는 날개의 받음각을 증가시킨다. bank angle이 증가함에 따라 받음각도 증가해야 한다. 받음각이 과도해지면 항공기는 언제든 실속에 빠진다.
항공기의 공기역학적 균형을 맞추기 위해 보통 CL은 CG의 뒤에 배치된다. 이는 항공기를 nose-heavy 상태로 만든다. 허나 수평 안정판이 이러한 상태를 상쇄한다. 실속 순간 날개의 양력이 감소하고 downward tail force가 감소하면(혹은 upward force가 발생하면) 불균형 상태가 발생한다. 이로 인해 항공기가 CG를 중심으로 회전하면서 갑자기 하강하기 시작한다. nose-down attitude 도중 받음각이 감소하고 대기 속도가 증가한다. 날개 위로 부드러운 공기 흐름이 흐르고 양력이 복구되며 항공기가 다시 비행하기 시작한다. 이러한 회복이 완료되기까지 상당한 고도가 손실될 수 있다.
에어포일 모양 또한 고려되어야 한다. 예를 들어 항공기 표면에 얼음, 눈, 그리고 서리가 쌓이게 되면 날개 위의 부드러운 공기 흐름이 방해를 받는다. 이로 인해 임계 받음각보다 낮은 받음각에서 경계층이 분리된다. 양력이 크게 감소하며 항공기 성능이 변화한다. 비행 도중 얼음이 쌓이면 항공기 무게가 증가하며 양력 생산 능력이 감소한다. [그림 5-40] 날개 상부 표면에 0.8mm 정도의 얼음이 있다면 항력이 증가하며 양력이 약 25% 감소한다.
조종사들은 지역이나 계절에 상관 없이 18,000ft 이내의 고도에서(때로는 그 이상의 고도에서도) 착빙을 조우할 수 있다. 소형 항공기는 착빙에 가장 취약하다. 왜냐하면 이들은 착빙이 널리 퍼져있는 낮은 고도를 비행하기 때문이다. 또한 이러한 항공기들은 착빙 방지 장치를 갖추지 않는다.
착빙은 기온이 영하일 때 구름 내에서 발생할 수 있다. 과냉각 물방울이 항공기에 부딪히면 착빙이 형성된다(과냉각 물방울은 설령 온도가 섭씨 0도 이하이더라도 액체 상태를 유지한다).
FAA는 범용 항공 사고를 줄이기 위해 GAJSC(General Aviation Joint Steering Committee)와 함께AOA indicators를 홍보하고 있다. AOA indicators는 특히 LOC(Loss of Control) 사고를 대상으로 한다. LOC는 범용 항공 사고와 상업 항공 사고의 가장 큰 근본 원인이다. 범용 항공 사망 사고의 25% 이상이 기동 단계(선회, 상승, 혹은 하강 단계) 도중 발생한다. 이러한 사고들 중 절반은 실속/스핀과 관련되어 있다. AOA indicators는 이러한 경향을 바꿔놓는데 엄청난 영향을 미칠 수 있다. 또한 해당 장치들은 점점 더 저렴한 가격으로 제공되고 있다. [그림 5-41]
AOA indicator은 에어포일의 공기역학적 상태와 관련하여 조종사에게상황 인식을 제공한다. 이를 stall margin awareness라고도 부른다. AOA indicator는 에어포일의 현재 받음각과 임계 받음각사이에 존재하는 받음각 여유를 나타낸다.
초기 비행 훈련 도중 학생들은 보통 메뉴얼에 게재된 1G 실속 속도만으로 실속을 회피한다. 허나 해당 속도는 다음 상황이 충족되는 경우에만 유효하기 때문에 문제가 발생한다:
• 비가속 비행(1G load factor)
• 삼타일치 비행(inclinometer 중앙)
• 특정 무게(일반적으로 maximum gross weight)
대기 속도 그 자체는 실속을 피하기 위한 신뢰할 수 있는 매개 변수가 아니다. 비행기는 모든 속도에서 실속에 빠질 수 있다. 실속을 피하기 위해서는 받음각이 더 나은 매개 변수이다. 특정 외장에 대해 비행기는 항상 같은 받음각(임계 받음각)에서 실속에 빠진다. 이러한 임계 받음각은 다음에 의해 변화하지 않는다:
• 무게
• bank angle
• 온도
• 밀도 고도
• 무게 중심
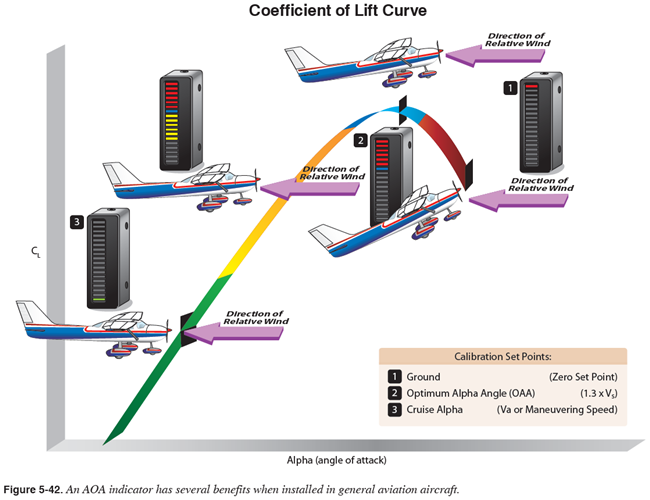
AOA indicator가 범용 항공 항공기에 설치되면 몇 가지 이점이 생긴다. 그 중에서 가장 중요한 것은 상황 인식 증가이다. AOA indicator가 없는 경우 받음각은 조종사로 하여금 “보이지 않는” 것이다. 이러한 장치는 여러 매개변수를 동시에 측정하여 받음각을 결정한다. 그런 다음 현재의 받음각을, 그리고 임계 받음각에 대한 근접 정도를 조종사에게 시각적으로 제공한다. [그림 5-42] AOA indicator는 비행기의 에너지 상태를 시각적으로 나타낼 수 있다. 비행기의 에너지 상태란 대기 속도, 고도, 항력, 그리고 추력 사이의 균형을 의미하며이는 에어포일이 얼마나 효율적으로 운영되는지를 나타낸다. 에어포일이 더 효율적으로 운영될수록 실속 여유가 커진다. 비행기의 에너지 상태와 관련된 상황 인식이 증가함에 따라 조종사는 실속/스핀으로 인한 LOC를 방지하는데 도움이 되는 정보를 얻을 수 있다. 또한 비행을 유지하는데 사용되는 에너지가 적을수록 비행기의 전반적인 효율성이 높아 높아진다. 이는 일반적으로 연료 절약을 실현하여 낮은 운영비용을 만들어낸다.
항공기의 시스템에 대한 교육이 필요한 것처럼 AOA indicators 또한 교육되어야 한다. 받음각에 대한 전반적인 이해, 그리고 해당 AOA indicator의 특성/한계가 교육 목표가 되어야 한다. 교관은 AOA indicators가 장착된 비행기와 관련된 교육을 하기 전에 이 장치에 대해 잘 알고 있는 사람으로부터 교육을 받아야 한다. 비행교육원은 AOA indicators에 대한 훈련을 실라버스에 포함해야 한다(설령 훈련 항공기가 해당 장비를 갖추지 않다 하더라도).
AOA indicators는 현재의 받음각, 그리고 임계 받음각 근접도에 대한 시각 정보를 제공한다. 그러나 한계가 없는 것은 아니다. AOA indicators가 장착된 범용 항공 비행기의 운영자는 이러한 한계들을 이해해야 한다. 장비를 제대로 이해하지 못하거나 잘못 사용하면 참혹한 결과가 발생할 수 있다. AOA indicators의 효과를 제한할 수 있는 몇 가지 항목들은 다음과 같다:
• 보정 기법
• 가열되지 않은 Probes나vanes
• indicator의 형식
• flap setting
• 날개 오염물질
AOA indicators가 장착된 범용 항공 비행기의 조종사는 해당 장비에 적용되는 특정 제한 사항에 대하여 제조업체에 문의해야 한다.
(ATP: angle of attack indicators와 stall warning devices는 날개에 가해지는 압력 분포를 감지함으로써 실속을 알려준다. stall warning device는 상대풍도 감지해야 한다. 왜냐하면 받음각은 시위선과 상대풍 사이의 각도이기 때문이다.)
항공기 프로펠러는 두 개 이상의 blade와central hub(여기에 블레이드가 부착됨)로 구성된다. 항공기 프로펠러의 각 블레이드는 본질적으로 회전하는 날개이다. 그 구조 덕분에 프로펠러 블레이드는 마치 에어포일처럼 작용하여 힘을 생산한다. 이 힘은 추력을 생성하여 공기 중의 항공기를 당기거나 밀어낸다. 엔진은 프로펠러 블레이드를 고속으로 회전시키는데 필요한 동력을 제공하고 프로펠러는 엔진의 회전력을 추력으로 변환한다.
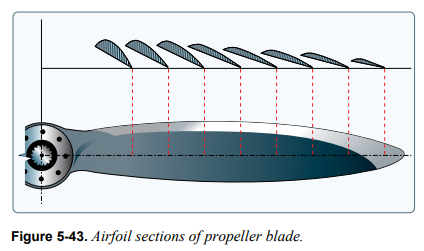
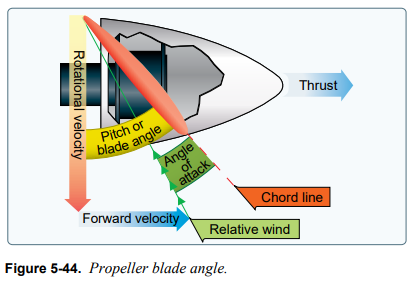
일반적인 프로펠러 블레이드의 단면이 그림 5-43에 나타나 있다. 이러한 단면은 항공기 날개의 단면과 유사하다. 블레이드의 한쪽 면은 항공기 날개의 윗면처럼 캠버를 가지고 있으며 반대쪽 면은 날개의 아랫면처럼 평평하다. 시위선은 블레이드의 앞전에서 뒷전으로 그려지는 가상의 선이다. 앞전은 프로펠러 회전 시 공기와 만나는 두꺼운 가장자리이다. 블레이드 각도는 블레이드의 시위선과 블레이드 회전 평면 사이의 각도를 의미하며 이는 보통 도(°)로 측정된다. 블레이드 각도는 블레이드의 특정 지점으로부터 측정된다. [그림 5-44] 대부분의 프로펠러가 평평한 blade “face”를 가지기 때문에 이 부분을 따라 시위선이 그려지는 경우가 많다. pitch와 blade angle은 서로 다른 것이지만 pitch가 주로 blade angle에 의해 결정되기 때문에 두 용어가 종종 같은 의미로 사용된다. 하나의 증가/감소는 보통 다른 하나의 증가/감소와 관련된다. 프로펠러의 pitch는 인치 단위로 지정될 수 있다. 예를 들어 “74-48”로 지정된 프로펠러의 경우 길이는 74인치이고 effective pitch는 48인치이다. pitch란 프로펠러가 한 바퀴 회전할 때 공기 중에서 이동하는 거리(인치 단위)를 의미한다(단, slippage가 없는 경우).
새로운 형식의 항공기에 fixed-pitch propeller를 지정할 때 제조업체는 보통 항공기의 순항 속도에서 효율적으로 작동하는 pitch를 선택한다. fixed-pitch propeller는 특정 대기속도와rpm조합에서만 효율적일 수 있으므로 모든 fixed-pitch propeller는 타협점이 필요하다. 조종사는 비행 도중 이 조합을 변경할 수 없다.
항공기 엔진이 작동하는 상태에서 지상에 정지해 있을 때, 혹은 이륙 초기에 천천히 움직이고 있을 때 프로펠러 효율은 매우 낮다. 왜냐하면 fixed-pitch blades가 최대 효율에 도달할 수 있는 속도로 전진하고 있지 않기 때문이다. 이때 프로펠러 블레이드는 출력의 양에 비해 상대적으로 적은 추력이 발생하는 받음각으로 회전한다.
프로펠러의 작용을 이해하려면 먼저 프로펠러의 움직임을 고려해야 한다. 그림 5-44을 보면 프로펠러 블레이드의 각 단면이 아래로(rotational velocity), 그리고 앞으로(forward velocity) 이동한다. 이러한 공기(상대풍)가 프로펠러 블레이드에 부딪히는 각도가 블레이드의 받음각이다. 이 각도에 의해 생성되는 공기의 편향이 프로펠러 블레이드의 엔진쪽 동압을 대기압보다 커지게 만들며 그 결과 추력이 형성된다.
블레이드의 모양도 추력을 생성한다. 왜냐하면 이는 날개의 에어포일 모양처럼 캠버를 가지기 때문이다. 공기가 프로펠러를 통과하여 흐를 때 한쪽 압력은 반대쪽 압력보다 작다. 날개와 마찬가지로 압력이 작은 방향을 향해 반작용이 형성된다. 날개 위의 공기 흐름은 압력이 작으므로 힘(양력)이 위로 향한다. 프로펠러는 수직면에 장착되므로 압력이 작은 영역이 프로펠러의 앞에 존재하며 그 결과로 힘(추력)이 전방으로 향한다. 공기역학적으로 추력은 프로펠러 모양과 블레이드 받음각의 결과이다.
추력은 프로펠러가 다루는 공기의 질량 측면에서도 고려될 수 있다. 여기에서 추력은 [다루어지는 공기 질량 x (후류 속도 - 항공기 속도)]와 같다. 추력을 생성하는데 소비되는 출력은 공기 덩어리가 움직이는 속도에 따라 달라진다. 추력은 평균적으로 토크(프로펠러가 흡수하는 총 마력)의 약 80%을 차지한다. 나머지 20%는 마찰과slippage로 인해 손실된다. 어떠한 프로펠러 회전 속도에서도 프로펠러가 흡수하는 마력은 엔진이 전달하는 마력과 균형을 이룬다. 프로펠러가 한 번 회전할 때 다루는 공기의 양은 블레이드 각에 따라 달라지며 이는 프로펠러가 얼마나 많은 양의 공기를 “bite” 할지 결정한다. 따라서 블레이드 각은 프로펠러에 가해지는 부하를 조정함으로써 엔진 rpm을 제어하는 훌륭한 수단이다.
블레이드 각은 프로펠러의 받음각을 조정하는 좋은 수단이기도 하다. constant-speed propeller의 경우 블레이드 각은 모든 엔진/항공기 속도에 대해 가장 효율적인 받음각을 제공하도록 조정되어야 한다. 프로펠러의 양력 대 항력 곡선을 보면 가장 효율적인 받음각이 +2 ~+4도로 작다. 이러한 작은 받음각을 유지하는데 필요한 블레이드 각은 항공기의 전진 속도에 따라 달라진다.
fixed-pitch propeller와 ground-adjustable propeller는 특정 프로펠러 회전 속도 및 항공기 전진 속도에서 가장 효율적이도록 설계되었다. 이들은 특정 항공기/엔진 조합에 대해 설계된다. 이륙, 상승, 순항, 혹은 고속 비행을 위한 최대 효율을 제공하는 프로펠러가 사용될 수 있다. 이러한 조건으로부터 벗어나면 프로펠러와 엔진의 효율이 저하된다. 기계의 효율성은 실제 출력 입력에 대한 유효 출력 산출의 비율이므로 프로펠러의 효율성은 제동마력(brake horsepower)에 대한 추력 마력(thrust horsepower)의 비율을 의미한다. 프로펠러 효율성은 “slips”의 정도에 따라 50 ~87%까지 변화한다. slip이란 프로펠러의 geometric pitch과effective pitch의 차이를 의미한다. [그림 5-45] geometric pitch는 프로펠러가 한 번 회전할 때 전진해야 하는 이론적 거리이고 effective pitch는 실제로 전진한 거리이다. 따라서 geometric(이론상) pitch는 slippage가 없다는 것을 기초로 하지만 effective(실제) pitch는 공중에서의 slippage를 포함한다.
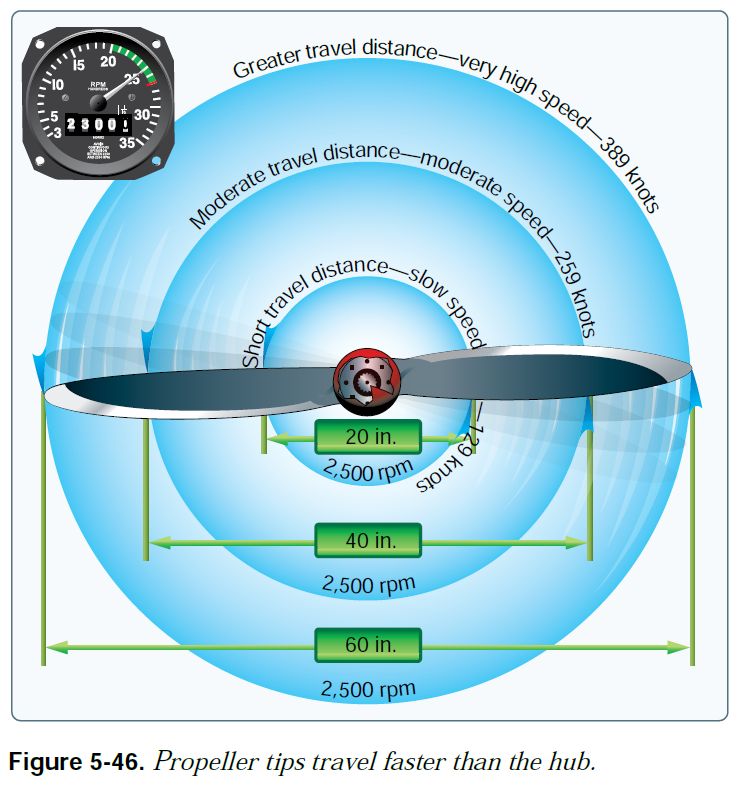
프로펠러는 뒤틀려 있다. 왜냐하면 프로펠러 블레이드의 바깥 부분이 중앙 근처보다 더 빠르게 이동하기 때문이다. [그림 5-46] 만약 블레이드가 전체 길이에 걸쳐 동일한 geometric pitch를 갖게 되면 순항 도중 중앙 근처의 블레이드가 음의 받음각을 받는 반면 바깥 부분의 블레이드는 실속에 빠질 것이다. 블레이드의 geometric pitch에 변화를 주면 순항 도중 프로펠러가 그 길이를 따라 비교적 일정한 받음각으로 작동할 수 있다. 프로펠러 블레이드는 프로펠러 길이에 따른 회전 속도 차이에 비례하여 각도가 변화하도록 뒤틀려 있다. 이를 통해 프로펠러 길이를 따라 추력이 균일하게 유지된다.
보통 1 ~ 4도가 가장 효율적인 양항비를 제공한다. 허나 fixed-pitch propeller의 프로펠러 받음각은 보통 0 ~ 15도까지 변화한다. 이러한 변화는 상대풍의 변화에 의해, 즉 항공기 속도의 변화에 의해 발생한다. 따라서 프로펠러 받음각은 두 가지 움직임을 통해 결정된다: 프로펠러의 회전 속도와 항공기의 전진 속도.
constant-speed propeller는 비행 도중 마주하는 대부분의 조건에 대해 최대 효율이 발생하도록 블레이드 각을 자동으로 조정한다. 이륙 도중(최대 출력 및 추력이 필요할 때) constant-speed propeller는 낮은 블레이드 각도 상태에 놓인다. 낮은 블레이드 각은 상대풍에 대한 받음각을 작고 효율적이게 유지한다. 동시에 이는 프로펠러 회전 시 적은 양의 공기가 다뤄지도록 한다. 이러한 낮은 부하를 통해 엔진은 높은 rpm으로 회전하며 특정 시간 내에 최대 연료량을 열에너지로 변환하게 해준다. 비록 high rpm일 때 프로펠러가 다루는 공기의 질량은 적긴 하지만 최대 추력이 발생한다. 왜냐하면 항공기 전진 속도는 낮고 후류 속도는 빠르기 때문이다.
이륙 후에 constant-speed propeller는항공기 속도가 증가함에 따라 자동으로 높은 각도로 변경된다. 높은 블레이드 각은 상대풍에 대한 받음각을 계속 작고 효율적이게 유지한다.
constant-speed propeller 항공기로 상승이 설정되었다면 먼저 manifold pressure를 낮춰서 엔진 출력을 상승 설정으로 만든다. 그런 다음에는 블레이드 각을 증가시켜서 rpm을 낮춘다.블레이드 각도가 높아지면 프로펠러 회전 당 처리되는 공기의 질량이 증가한다.이는 엔진rpm을 감소시키고,연료 소모량과 엔진 마모를 줄이며,추력을 최대로 유지한다.
순항 고도에서 항공기가 수평비행 중이며 이륙이나 상승보다 적은 양의 출력이 필요하다면 다시 manifold pressure를 낮춰서 엔진 출력을 감소시킨다. 그리고 rpm을 감소시키기 위해 블레이드 각을 증가시킨다. 이는 감소된 엔진 출력에 맞는 토크조건을 제공한다. 비록 회전 당 다루어지는 공기의 질량이 더 커졌지만 이는 후류 속도의 감소와 전진 속도의 증가로 인해 상쇄된다. 항공기 전진 속도가 증가함에 따라 블레이드 각도가 증가하였기 때문에 받음각은 여전히 작다.
Torque andP-factor
좌선회 경향은 네 가지 요소로 구성되며 이들은 세 개의 축들 중 적어도 하나를 중심으로 비행기를 회전시킨다. 네 가지 요소는 다음과 같다:
1. 엔진과 프로펠러의 토크 반작용.
2. 프로펠러 후류의 corkscrewing effect.
3. 프로펠러의 자이로 작용.
4. 프로펠러의 비대칭 부하(= P-factor).
Torque Reaction
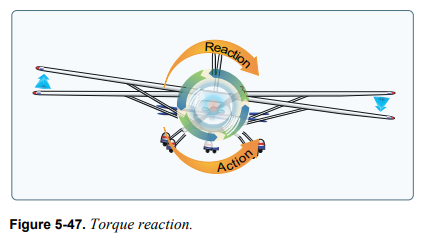
토크 반작용은 뉴턴의 제 3법칙(모든 작용에는 이와 동등한, 그리고 이에 반대되는 반작용이 있다)과 관련이 있다. 즉, 내부 엔진 부품들과 프로펠러가 한쪽 방향으로 회전하므로 이와 동일한 힘이 항공기를 반대 방향으로 회전시키려 한다는 것을 의미한다. [그림 5-47]
항공기가 공중에 있을 때 이러한 힘은 세로축을 중심으로 작용하여 항공기를 roll 시키려는 경향이 있다. 일부 옛날 항공기는 이러한 roll 경향을 보상하기 위해 아래로 roll 하는 날개에서 더 많은 양력이 생성되도록 설계되었다. 보다 현대적인 항공기에서는 이러한 토크 영향을 상쇄하기 위해 엔진이 어긋나게 설계된다.
NOTE: 미국에서 제작된 대부분의 항공기 엔진은 프로펠러를 시계방향으로 회전시킨다(조종사 좌석에서 보았을 때). 여기서는 이러한 엔진과 관련된 것을 설명한다.
(출처: youtube/flight-club)
항공기 운영 시간의 대부분은 보통 순항 속도에서 이루어진다. 따라서 보정 요소들은 순항 속도에서의 토크가 보상되도록 영구 설정된다. 허나 aileron trim tabs를 사용하면 순항 속도 이외의 속도에서도 토크가 보상될 수 있다. 이륙 활주 도중 항공기의 바퀴가 지면에 있을 때에는 토크 반작용으로 인해 수직 축을 중심으로 선회 모멘트가 발생한다. 토크 반작용으로 인해 항공기의 좌측이 아래로 밀리면서 left main landing gear에 더 많은 무게가 가해진다. 이로 인해 우측 타이어보다 좌측 타이어의 지면 마찰이 더 커져서 좌측으로 선회 모멘트를 만들어낸다. 이러한 모멘트의 크기는 다양한 변수들에 의해 달라진다. 이러한 변수들 중 일부는 다음과 같다:
1. 엔진의 크기와 마력.
2. 프로펠러의 크기와rpm.
3. 항공기의 크기.
4. 지면의 상태.
이륙 활주 도중 발생하는 yawing moment는 rudder나rudder trim을 통해 수정된다.
Corkscrew Effect
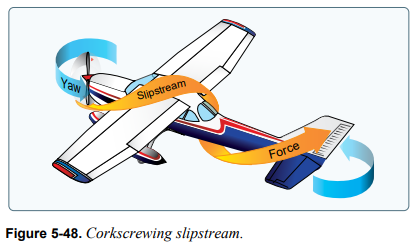
빠르게 회전하는 항공기 프로펠러는 후류(slipstream)를 나선형으로 회전하게 만든다. 프로펠러 속도는 높고 항공기 전진 속도는 낮다면(예를 들어 이륙도중) 이러한 나선형 회전이 매우 촘촘해진다. 이는 항공기의 수직 꼬리 표면에 강한 측면 힘을 가한다. [그림 5-48]
나선 후류가 vertical fin에 부딪히면 이는 항공기의 수직축을 중심으로 yawing moment를 발생시킨다. 나선 후류가 더 촘촘해질수록 그 힘은 더 커진다. 허나 항공기 전진 속도가 증가하면 나선 후류가 길게 늘어져서 모멘트가 작아진다. 또한 나선 후류는 세로축을 중심으로 rolling moment도 발생시킨다.
나선 후류로 인한 rolling moment는 우측으로 발생한다. 반면 토크 반작용으로 인한 rolling moment는 좌측으로 발생한다. 즉, 하나가 다른 하나를 상쇄할 수 있다. 그러나 이러한 힘들은 크게 변화하기 때문에 조종사는 항상 조종간을 통해 적절한 수정 조치를 취해야 한다.
Gyroscopic Action
프로펠러의 자이로 영향을 이해하기 전에 먼저 자이로스코프의 기본 원리를 이해해야 한다. 자이로스코프는 두 가지 기본 특성을 가지고 있다: 공간 강성과 세차. 이 논의에서 사용되는 기본 특성은 세차이다.
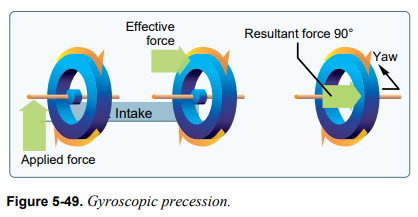
세차란 회전 중인 로터의 가장자리에 편향력이 가해졌을 때 발생하는 작용이다. 그림 5-49를 보면 힘이 가해졌을 때 그 결과적으로 발생하는 힘이 회전 방향의 전방 90도에서 나타난다. 비행기의 프로펠러는 자이로스코프를 만들어내므로 이와 유사한 특성을 가진다. 프로펠러를 회전 평면 바깥으로 편향시키기 위한 힘이 작용될 때마다 그 결과적으로 발생하는 힘이 회전 방향의 전방 90도에서 나타난다. 이는 힘이 작용한 지점에 따라 pitching moment나 yawing moment를, 혹은 pitching moment와 yawing moment 모두를 발생시킨다.
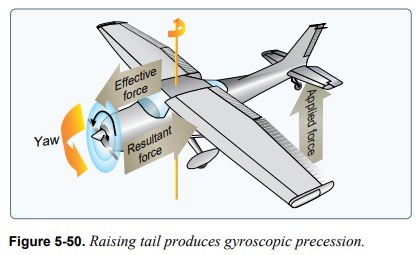
세차는 항상 tailwheel-type aircraft에서 더 두드러지게 나타나며 특히 이륙 활주 도중 꼬리를 들 때 가장 자주 발생한다. [그림 5-50] 이러한 pitch 자세 변화는 프로펠러 회전면의 상단에 힘을 가하는 것과 같은 효과를 만든다. 전방 90도에서 작용하는 힘은 수직축을 중심으로 좌측을 향해 yawing moment를 발생시킨다. 이러한 모멘트의 크기는 몇 가지 변수들에 따라 달라지는데그중 하나는 꼬리를 들 때 적용된 힘의 양이다. 허나 세차는 프로펠러 회전면 가장자리의 어떤 지점에 힘이 가해졌을 때 발생하며 그 결과적인 힘은 여전히 회전 방향의 전방 90도에서 나타난다. 힘이 적용되는 위치에 따라 비행기는 좌우로 yaw 하거나, 위아래로 pitch 하거나, 혹은 pitching/yawing이 모두 발생한다.
세차로 인하여 수직축을 중심으로 발생한 모든 yawing은 pitching moment를 만들고가로축을 중심으로 발생한 모든 pitching은 yawing moment를 만들어낸다 할 수 있다. 세차로 인하여 만들어진 pitching/yawing moment를 막기 위해 조종사는 elevator/rudder를 적절히 사용해야 한다.
Asymmetric Loading(P-Factor)
항공기가 높은 받음각으로 비행할 경우 아래로 움직이는 블레이드의 “bite”가 위로 움직이는 블레이드의 “bite”보다 크다. 이는 추력 중심을 프로펠러 회전 영역의 우측으로 이동시키며 그 결과 수직축을 중심으로 왼쪽을 향해 yawing moment를 발생시킨다. 이것을 증명하는 것은 복잡하다. 왜냐하면 항공기의 받음각과 각 프로펠러 블레이드의 받음각을 모두 고려하면서 각 프로펠러 블레이드에 대한 바람 벡터 문제를 해결해야하기 때문이다.
이러한 비대칭 부하는 합성 속도에 의해 발생한다. 합성 속도는 회전면에서의 프로펠러 블레이드 속도와 프로펠러 회전 영역을 수평으로 통과하는 공기 속도가 합쳐져서 형성된다. 항공기가 양의 받음각으로 비행하면 아래로 움직이는 블레이드의 합성 속도 영역이 위로 움직이는 블레이드의 합성 속도 영역보다 커진다. 프로펠러 블레이드는 에어포일이기 때문에 속도가 증가하면 양력이 증가한다. 아래로 움직이는 블레이드는 더 많은 양력을 발생시켜서 항공기 기수를 좌측으로 당기는(yaw) 경향을 만든다.
항공기가 높은 받음각으로 비행하면 아래로 움직이는 블레이드가 더 높은 합성 속도를 가지므로 위로 움직이는 블레이드보다 더 많은 양력을 생산한다. [그림 5-51] 이는 프로펠러 축이 지면으로부터 수직으로 장착되었다 생각하면(마치 헬리콥터처럼) 더 쉽게 이해될 수 있다. 만약 공기 움직임이 전혀 없다면(단, 프로펠러가 생산하는 공기 움직임은 제외) 각 블레이드의 단면들은 동일한 속도를 가질 것이다. 허나 만약 해당 프로펠러를 가로지르는 공기 움직임이 존재한다면 공기 흐름을 향해 전진하는 블레이드가 공기 흐름으로부터 멀어지는 블레이드보다 더 높은 대기 속도를 가진다. 따라서 수평 공기 흐름을 향해 전진하는 블레이드가 더 많은 양력을 형성한다. 이는 추력 중심을 해당 블레이드쪽으로 이동시킨다. 이제는 수직으로 장착된 프로펠러 축이 공기 흐름에 대해 더 얕은 각도로 회전하고 있다 생각해보자. 이러한 비대칭 추력은 프로펠러 축이 공기 흐름에 대해 정확히 수평이 되기 전까지 계속 비례적으로 작아진다.
(출처: youtube/flight-club)
이 네 가지 요소의 영향들은 비행 상황에 따라 달라진다. 특정 비행 구간에서는 이러한 요소들 중 하나가 다른 요소들보다 더 두드러질 수 있으며그 외의 비행 구간에서는 다른 요소들이 더 두드러질 수 있다. 이러한 값들의 관계는 동체, 엔진, 그리고 프로펠러의 조합에 따라 달라지며 그 외 설계 특징 또한 영향을 미친다. 어떠한 비행 조건에든 항공기를 확실하게 제어하려면 이러한 값들이 보상되도록 조종간을 적용해야 한다.
최대 하중 계수는 양력과 무게 사이의 비율을 의미한다. 하중 계수는 G(중력가속도. 정지 상태의 물체에 중력이 가하는 힘의 단위)로 측정되며이는 물체가 가속될 때 받는 힘을 나타낸다. 항공기를 직진 비행 상태로부터 벗어나게 만드는 모든 힘은 항공기 구조에 응력을 발생시킨다. 이러한 힘의 양이 하중 계수이다. 조종사는 항공기에 작용하는 힘, 이러한 힘의 유리한 용도, 그리고 비행중인 항공기의 운영 한계를 확실하게 이해해야 한다.
예를 들어 3의 하중 계수는 항공기 구조에 가해지는 총 하중이 3배임을 의미한다. 하중 계수는 G로 표현된다. 따라서 3의 하중 계수는 3G라 말할 수 있다.
항공기 급강하 도중 기수를 당겨서 3G가 가해지면 조종사는 본인 무게의 3배에 해당하는 힘으로 좌석에 눌릴 것이다. 현대의 항공기는 옛날 항공기보다 훨씬 빠른 속도로 운항하기 때문에 높은 하중 계수가 발생할 가능성이 더 높다.따라서 이러한 영향이 모든 항공기의 구조 설계에서 주요 고려 사항이 되었다.
항공기 구조 설계가 특정한 양의 과부하만을 견딜 수 있도록 설계되므로 조종사는 하중 계수에 대한 지식을 알아야 한다. 하중 계수는 다음 두 가지 이유 때문에 중요하다:
1. 항공기 구조에 위험한 과부하를 가할 수 있다.
2. 하중 계수가 증가하면 실속 속도가 증가한다. 이로 인해 안전해 보이는 비행 속도에서도 실속이 발생할 수 있다.
Load Factors in Aircraft Design
“항공기의 강도는 어느 정도여야 하는가?”라는 질문에 답하자면항공기가 사용되는 용도에 따라 달라진다. 이는 어려운 문제이다. 왜냐하면 효율적으로 설계하기엔 maximum possible loads가 너무 높기 때문이다. 어떠한 조종사도 hard landing을 수행할 수 있으며이는 비정상적인 하중으로 이어질 것이다. 허나 빠르게 이륙하고천천히 착륙하며중요한 유상하중을 운반하는 항공기를 제작한다면 이러한 비정상적인 하중이 어느 정도 해소되어야 한다.
항공기 설계 시 하중 계수에 대한 문제는 정상 운영 도중 예상될 수 있는 가장 높은 하중 계수를 어떻게 결정할 것인가로 귀결된다. 이러한 하중 계수를 “limit load factors”라 부른다. 안전상의 이유를 위해 항공기는 이러한 하중 계수를 구조적 손상 없이 견딜 수 있도록 설계되어야 한다. CFR은 다음과 같이 명시한다: 항공기 구조물은 이러한 limit load factors의 1.5배를 구조적 파괴 없이 견딜 수 있어야 한다(단, 이러한 하중으로 인해 항공기의 일부가 뒤틀리거나일부 구조적 손상이 발생하는 것은 허용한다).
이러한 1.5 load limit factor를 “factor of safety”라 부른다. 이는 정상 운영 도중 발생하리라 예상되는 하중보다 어느 정도 높은 하중을 대비할 수 있게 해준다. 이러한 예비 강도는 조종사가 의도적으로 사용할 수 있는 것이 아니다. 이는 예상치 못한 상황이 발생하였을 때 조종사를 보호하기 위한 것이다.
위의 고려 사항은 돌풍, 기동, 혹은 착륙으로 인한 모든 하중 조건에 적용된다. 현재 시행중인 gust load factor 조건은 수년 동안 존재해온 조건과 거의 동일하다. 이는 수십만 시간의 운항을 통해 안전에 적합하다는 것이 증명되었다. 조종사가 gust load factors를 제어할 수는 없으므로(단, 항공기 속도를 줄이는 것은 제외) gust load factor 조건들은 대부분의 범용 항공 항공기에 대해 실질적으로 동일하다. 보통 gust load factors는 곡예비행을 목적으로 하지 않는 항공기의 설계 조건을 규제한다.
maneuvering load factors가 있는 항공기 설계에서는 완전히 다른 상황이 존재한다. 이 문제는 다음과 관련하여 별도로 논의되어야 한다: (1) category system(즉, normal, utility, acrobatic)에 따라 설계된 항공기 (2) category를 제공하지 않는 조건에 따라 설계된 구형 항공기.
category system에 따라 설계된 항공기는 조종실의 placard를 통해 쉽게 식별될 수 있다. placard는 항공기에 대해 증명된 category를 명시한다. 특정 category에 대한 maximum safe load factors(limit load factors)는 다음과 같다:
※ 총 무게가 4,000파운드를 초과하는 normal category 항공기의 경우 limit load factor가 감소한다.
기동의 난이도가 높아질수록 하중 계수가 상향 조정된다. category system은 항공기의 활용도를 극대화하기 위한 것이다. normal operation만을 목적으로 하는 항공기에 필요한 하중 계수는 훈련이나 곡예비행에 필요한 하중 계수보다 작다.
category placard가 없는 항공기는 초기 설계 조건에 따라 제작된 항공기로이는 조종사에게 특별한 운영 제한을 가하지 않는다. 약 4,000파운드 미만의 항공기 무게에 필요한 강도는 현재의 utility category aircraft와 거의 유사하며 동일한 유형의 운영이 허용된다. 항공기 무게가 4,000파운드를 초과하면 하중 계수가 무게에 따라 감소한다. 이러한 항공기는 normal category aircraft로 간주되어야 하며 이에 따라 운영되어야 한다.
Load Factors in Steep Turns
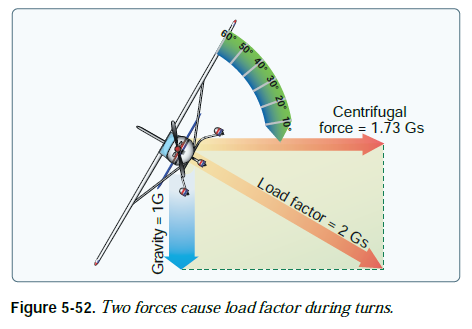
고도를 유지하면서 선회를 수행할 때 하중 계수는 두 가지 힘에 의해 발생한다: 원심력과 무게. [그림 5-52] 특정 bank angle에서 선회율은 대기속도에 따라 달라진다(대기속도가 높을수록 선회율은 느려지고 대기속도가 낮을수록 선회율은 빨라짐). 이는 추가적인 원심력을 보상하여 하중 계수가 동일하게 유지되도록 만든다.
그림 5-53은 선회에 대한 중요한 사실을 보여준다. 바로 bank가 45도에 도달한 후에 하중 계수가 놀라운 속도로 증가한다는 것이다. 60도 bank에서 수평 선회 중인 항공기의 하중 계수는 2G이다. 80도 bank의 하중 계수는 5.76G이다. 고도를 유지하고자 한다면 날개가 이러한 하중 계수와 동일한 양력을 생성해야 한다.
90도 bank에 근접함에 따라 그래프가 얼마나 빠르게 상승하는지 주목한다. 90도 bank로 일정한 고도를 선회하는 것은 수학적으로 불가능하다. 고도를 유지지 않는 경우에는 90도 bank 선회를 수행할 수 있다. 90도 bank에서 slipping turn을 유지할 수 있는 항공기는 straight knife-edged flight를 수행할 수 있다. 80도가 약간 넘는 bank에서는 곡예비행기의 limit load factor인 6G가 초과된다.
(knife-edge flight. 출처: Youtube/Rombaut RC)
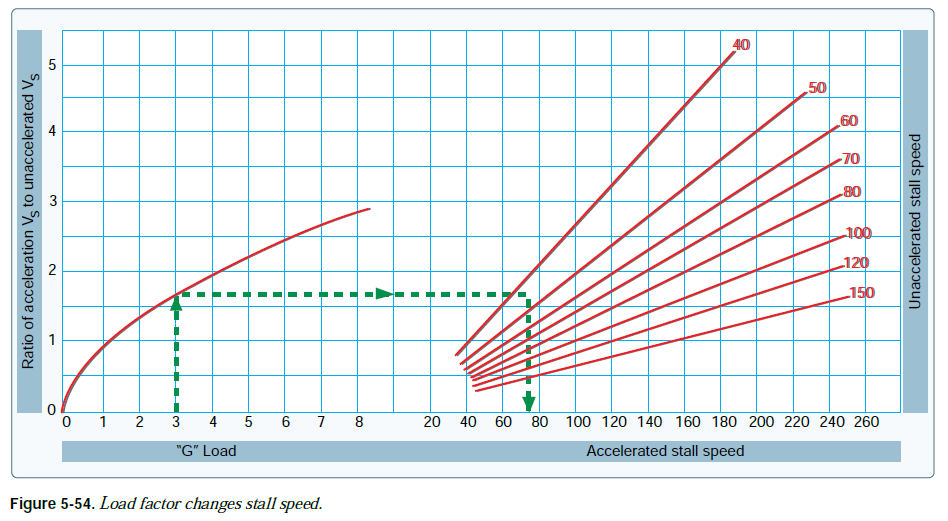
일반적인 범용 항공 항공기가 고도를 유지하면서 선회를 할 때 사용하는 대략적인 최대 bank는 60도이다. 60도의 bank, 그리고 60도 bank에 필요한 출력은 범용 항공 항공기를 한계에 도달하게 만든다. bank가 10도 더 가해지면 하중 계수가 약 1G 증가한다. 이는 해당 항공기에 설정된 항복점(yield point)에 근접하게 만든다. [그림 5-54]
(출처: 네이버 지식백과)
Load Factors and Stalling Speeds
모든 항공기는 어느 비행 속도에서도 실속에 빠질 수 있다. 충분히 높은 받음각이 가해지면 에어포일 위의 원활한 공기 흐름이 분리되며 비행 특성의 급격한 변화와 급격한 양력 손실이 발생한다. 이는 곧 실속으로 이어진다.
항공기의 실속 속도는 하중 계수의 제곱근에 비례하여 증가한다. 즉, 정상적인 비가속 실속 속도가 50노트인 항공기에 4G의 하중 계수가 발생하면 항공기가 100노트에서 실속에 빠질 수 있다. 만약 이 항공기가 9G의 하중 계수를 견딜 수 있다면 항공기가 150노트에서 실속에 빠질 수 있다. 조종사는 다음 사항을 알고 있어야 한다:
∙하중 계수가 증가하면 의도치 않게 실속에 빠질 수 있다(예를 들어 steep turn이나 sprial 도중).
∙ design maneuvering speed를 초과한 속도에서 의도적으로 항공기를 실속시킬 경우 엄청난 하중 계수가 부과된다.
72도의 steep turn 도중 항공기에 3G의 하중 계수가 가해져 실속 속도가 크게 증가한다. [그림 5-53과 54] 정상적인 비가속 실속 속도가 45노트인 항공기로 이 선회를 수행하는 경우에는 대기속도를 75노트 이상 유지함으로써 실속을 방지해야 한다. 빠르게 기수를 당기거나1G를 초과하는 기동을 수행할 때에도 이와 유사한 효과가 발생한다.
실속 속도가 두 배가 되면 하중 계수는 제곱이 된다. 따라서 상대적으로 높은 대기 속도에서 항공기가 실속에 빠지면 구조물에 엄청난 하중이 가해질 수 있다.
비행기가 안전하게 실속에 빠질 수 있는 최대 속도를 “design maneuvering speed”(VA)라 부른다. 이 속도 이하에서 조종사는 비행기 손상의 위험 없이 하나의 비행기 축(pitch, roll, 혹은 yaw)에 대해 하나의 조종간 입력을 한 번 full deflection으로 움직일 수 있다(단, 이는 smooth air를 조건으로 함). VA는 모든 비행기의 AFM/POH에 입력되어야 한다. 구형 범용 항공 비행기의 경우 이러한 속도는 정상 실속 속도의 약 1.7배이다. 따라서 60노트에서 실속에 빠지는 구형 비행기가 102노트(60노트 x 1.7 = 102)를 초과하는 속도에서 실속에 빠져선 안 된다. 실속 속도가 60노트인 비행기가 102노트에서 실속에 빠질 경우 2.89G(1.7 x 1.7 = 2.89)의 하중 계수를 겪는다. (해당 값은 참고용 수치이므로 제조업체가 제공하는 특정 항공기의 운영 한계[operating limitations]를 통해 design maneuvering speed를 결정해야 한다.) 설령 design maneuvering speed 이하로 비행하여도 하나의 축에 여러 번의 full control inputs를 가하거나, 혹은 두 개 이상의 축에 full control inputs를 가하면 구조적 보호가 제공되지 않는다.
조종간 시스템은 항공기마다 다르다. 따라서 조종간에 가해지는 압력을 하중 계수의 지표로 받아들일 수 없다. 대부분의 경우 하중 계수는 조종사가 느끼는 착석 압력(seat pressure)을 통해 판단될 수 있다. 하중 계수는 또한 “가속도계(accelerometer)”라 불리는 계기로도 측정될 수 있다. 그러나 해당 계기는 범용 항공 훈련용 항공기에서는 일반적이지 않다. 신체에 가해지는 영향을 통해 하중 계수를 판단하는 능력을 개발시키는 것은 중요하다. 이러한 원리에 대한 지식은 하중 계수를 추정하는 능력을 개발하는데 필수적이다.
가지각색의 bank angle로부터 발생하는 하중 계수를 알면 두 가지 유형의 심각한 사고를 예방하는데 도움이 된다:
1. steep turns나 과도한 기동으로 인한 실속.
2. 곡예비행이나 그 외 맹렬한 기동 도중 loss of control로 인한 구조적 파괴.
Load Factors and Flight Maneuvers
하중 계수는 모든 비행 기동에 적용된다(단, 항상 1G의 하중 계수가 존재하는 비가속 직진 비행은 제외). 여기서 고려하는 특정 기동들은 상대적으로 높은 하중 계수를 수반한다. pitch, roll, 혹은 yaw를 full로 적용하는 것은 maneuvering speed 이하로 제한되어야 한다. 갑작스럽고 큰 조종간 입력 변화는 VA이하에서도 구조적 파괴를 초래할 수 있으므로 이를 피한다(특히 pitch, roll, 혹은 yaw의 큰 변화가 함께 사용되는 경우. 예를 들어 큰 sideslip 각도).
(ATP: 비행기가 부양한 후에 갑자기 기수를 당기거나 급선회를 수행하면 실속, 스핀, 혹은 상승률 감소로 이어질 수 있다.)
Turns
하중 계수의 증가는 모든 선회의 특징이다. bank가 약 45도 이상으로 증가하면 하중 계수는 비행 성능과 날개 구조 부하에 중대한 영향을 미친다.
일반적인 소형 비행기의 limit load factors는 약 70 ~ 75도의 bank에서 도달한다. 실속 속도는 대략 63도의 bank에서 절반이 증가한다.
Stalls
직진수평비행으로부터 진입되는 실속, 혹은 비가속 직진 상승으로부터 진입되는 실속은 1G를 초과하는 추가 하중 계수를 생성하지 않는다. 그러나 실속이 발생하면 이 하중 계수가 0으로 감소하여 무게가 사라진 것처럼 느낄 수 있다. 이때 조종사는 “우주에서 자유롭게 떠다니는” 느낌을 경험한다. 만약 조종사가 elevator control을 급하게 밀어 회복을 수행하면 음(-)의 하중 계수가 발생할 수 있다.
실속 회복 후에 기수를 당길 때 종종 상당한 하중 계수가 발생한다. 이는 급강하(그리고 결과적으로 높은 대기속도) 도중에, 그리고 급격한 pull up 도중에 더욱 증가할 수 있다. 둘 중 하나는 보통 다른 하나로 이어져서 결국 하중 계수를 증가시킨다. 급강하 도중 급격하게 기수를 당기면 항공기 구조에 치명적인 부하를 가할 수 있다. 또한 받음각을 실속 받음각까지 증가시켜서 secondary stall이 발생할 수도 있다.
대기속도가 실속 속도 이상이 되었을 때 점진적으로 기수를 당기되 cruising airspeed나 design maneuvering airspeed 미만의 속도에서 실속이 회복되면 2G나 2.5G를 초과하지 않을 수 있다. 더 높은 하중 계수가 발생해서는 안 된다(단, 수직 자세에 가까운 항공기 상태로부터 회복이 수행되는 경우, 혹은 극도로 낮은 고도에서 회복이 수행되는 경우 제외).
Spins
스핀은 축을 중심으로 회전하는 것 이외의 다른 요소에서 실속과 다르지 않다. 때문에 실속 회복 도중 적용되는 하중 계수 고려 사항들이 스핀 회복 도중에도 적용된다. 스핀 회복은 보통 실속 회복보다 훨씬 낮은 기수에서 수행된다. 때문에 더 높은 대기속도와 이에 따른 더 높은 하중 계수가 예상된다. 올바른 스핀 회복 도중 발생하는 하중 계수는 보통 약 2.5G이다.
스핀 도중 발생하는 하중 계수는 항공기의 스핀 특성에 따라 다르다. 허나 이는 일반적으로 1G보다 약간 높다. 여기에는 두 가지 이유가 있다:
1. 스핀 도중 대기속도는 매우 낮다(보통 비가속 실속 속도로부터 2노트 이내).
2. 스핀 도중 항공기는 선회를 수행한다기 보다는 축을 중심으로 회전한다.
High Speed Stalls
소형 비행기는 high speed stalls 도중 발생하는 하중 계수가 반복적으로 적용되는 것을 견딜 수 있도록 제작되지 않는다. 이러한 기동에 필요한 하중 계수는 날개와 꼬리 구조에 응력을 발생시킨다. 이는 대부분의 소형 비행기에 안전 여유를 남기지 않는다.
이 실속을 정상 실속 속도보다 높은 대기속도에서 발생시킬 수 있는 유일한 방법은 추가 하중 계수를 부과하는 것이다. 이는 elevator control을 강하게 잡아당김으로서 이루어질 수 있다. 예를 들어 실속속도의 1.7배속도는(실속 속도가60노트인 소형 비행기의 경우 약102노트) 3G의 하중 계수를 생성한다. 대기속도가 증가함에 따라 하중 계수도 빠르게 증가한다. 동일한 항공기가112노트에서 high-speed stall에 빠지면4G의 하중 계수가 생성된다.
Chandelles and Lazy Eights
chandelle은 직진수평비행에서 시작되는 최대 성능 상승 선회로180도 선회가 완료되면 wing-level, nose-high attitude, 그리고 minimum controllable airspeed가 완성된다. 이 기동 도중 항공기는 가파른 상승 선회를 수행하며 상승하는 동안 거의 실속에 가까워진다. lazy eight는 항공기의 세로축이 “∞” 모양의 비행 패턴을 그리도록 만들어진 방법에서 그 이름이 유래되었다. 이러한 기동들의 하중 계수에 대해 명확하게 말하기는 어렵다. 왜냐하면 둘 다 매끄럽고 얕은 dive/pull-up을 포함하기 때문이다. 기동 도중 발생하는 하중 계수는 하강 속도, 그리고 pull-up 속도에 따라 달라진다.
보통 기동이 잘 수행될수록 하중 계수가 덜 극단적으로 발생한다. pull-up으로 인해 2G 이상의 하중 계수가 발생하면 고도가 크게 상승하지 않는다(출력이 낮은 항공기의 경우에는 고도가 떨어질 수도 있다).
최대한 매끄러운 pull-up이 가해지면 chandelle 도중 적당한 하중 계수와 함께 최대 고도 상승이 발생한다. 매끄러운 pull-up은chandelle과 lazy eight의 전반적인 결과도 향상시킨다. 이러한 기동들을 위한 권장 진입 속도는 보통 제조업체의 design maneuvering speed 근처에 있다. 이를 통해 load limits를 초과하지 않고도 하중 계수를 최대로 증가시킬 수 있다.
Rough Air
항공기는 상당한 강도의 돌풍에 의해 부과되는 하중을 견딜 수 있도록 설계되었다. gust load factor는 비행 속도에 비례하여 증가하며 설계 목적을 위해 사용되는 강도는 보통 최대 비행 속도에 상응한다. 심한 rough air에서는(예를 들어 뇌우나 전선에서는) design maneuvering speed로 감속하는 것이 현명하다.
각 항공기는 구조적 손상 없이 항공기에 가해질 수 있는 특정G loading을 갖는다.항공기 설계에 고려되는 두 가지 유형의 하중 계수가 있다: limit load와ultimate load. limit load는 항공기 구조가 원래의 형태로 돌아가지 않는 굽힘을 일으킨다. ultimate load는 limit load를 초과하여 항공기에 가해지는 하중 계수로이 지점에서 항공기 소재는 구조적 파괴를 경험한다. limit load보다 낮은 하중 계수는 항공기 구조를 손상시키지 않는다.
maneuvering speed 미만의 속도는 limit load가 초과되는 하중 계수가 발생하기 전에 항공기를 실속에 빠지게 만든다.
대부분의 AFM/POH는 turbulent air 통과 정보를 포함한다. 이는 광범위한 속도 및 고도를 비행할 수 있는 항공기를 안전하게 운항하는데 도움을 제공한다. “never-exceed” placard는 오직 smooth air에 대해 결정된 것임을 기억해야 한다. maneuvering speed를 초과하는 고속 하강이나 곡예비행을 rough air나 turbulent air에서 수행해서는 안 된다.
Vg Diagram
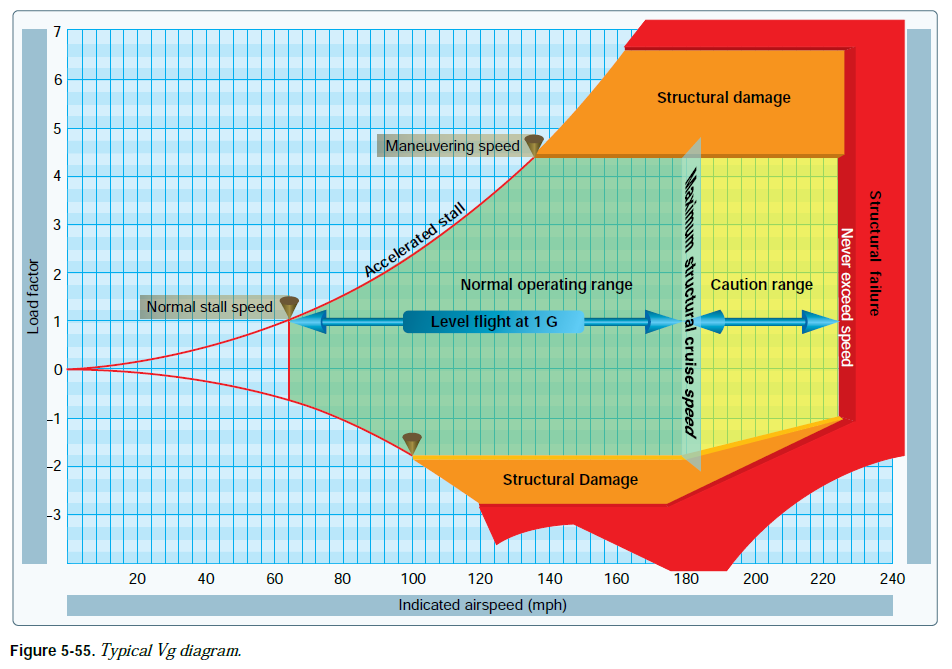
항공기의 운영 강도가 그래프에 표시된다. [그림 5-55] 그래프의 수직 눈금은 하중 계수를 기초로 한다. 이 도표를 Vg diagram이라 부른다. 각 항공기는 특정 무게 및 고도에 유효한 본인만의 Vg diagram을 가진다.
maximum positive lift capability(붉은색 곡선)는 Vg diagram에서 가장 중요한 항목이다. 그림 5-55의 항공기는 64mph(항공기의 실속 속도)에서 +1G 이하의 양력을 생산할 수 있다. 최대 하중 계수는 속도의 제곱에 따라 달라지므로 이 항공기의 maximum positive lift capability는 92mph에서 2G, 112mph에서 3G, 그리고 137mph에서 4.4G이다. 이 곡선을 초과하는 하중 계수는 공기역학적으로 사용할 수 없다. 왜냐하면항공기가 실속에 빠지기 때문이다. 음(-)의 양력 곡선에서도 동일한 상황이 존재한다(단, 특정 음(-)의 하중 계수를 생성하는데 필요한 속도가 동일한 양(+)의 하중 계수를 생성하는데 필요한 속도보다 높다는 점 제외).
항공기가 positive limit load factor 4.4보다 높은 하중 계수로 비행하면 구조적 손상이 발생할 수 있다. 항공기가 이 구간을 운영하면 primary structure의 영구적 변형이 발생할 수 있으며 높은 비율의 피로 손상이 발생한다. 정상 운영 도중 limit load factor가 초과되는 것을 피해야 한다.
Vg diagram에는 두 가지 중요한 지점이 있다. 하나는 positive limit load factor와 maximum positive lift capability가 교차하는 지점이다. 이 지점은 공기역학적으로 limit load가 만들어질 수 있는 최소 속도이다. 이보다 높은 속도는 항공기를 손상시키기에 충분한 positive lift capability를 제공한다. 반면 이보다 낮은 속도는 과도한 비행 하중으로 인한 손상을 발생시키기에 충분한 positive lift capability를 제공하지 않는다. 이러한 속도는 보통 “maneuvering speed”라 불린다. 왜냐하면 아음속 공기역학을 고려하면 이 조건에서 발생할 수 있는 기동성이나 최소 선회 반경을 예측할 수 있기 때문이다. maneuvering speed 이하로 비행할 경우 항공기에 손상을 가하는 양(+)의 비행 하중이 생성될 수 없으므로 이는 매우 중요한 기준점이다.항공기가 maneuvering speed 이하로 비행중이면 어떠한 기동 및 돌풍 조합도 손상을 발생시킬 수 없다.
Vg diagram에서 중요한 또 다른 지점은 negative limit load factor와 maximum negative lift capability가 교차하는 지점이다. 이보다 높은 속도는 항공기를 손상시키기에 충분한 negative lift capability를 제공한다. 반면 이보다 낮은 속도는 항공기 손상을 발생시키기에 충분한 negative lift capability를 제공하지 않는다.
limit airspeed(혹은 redline speed)는 항공기의 설계 기준점이다. 이 항공기의 경우 limit airspeed는 225mph이다. 해당 속도가 초과되면 다양한 현상으로 인해 구조적 손상이나 구조적 파괴가 발생할 수 있다.
비행 중인 항공기는 limit speed가 초과되지 않는, limit load factor가 초과되지 않는, 그리고 maximum lift capability가 초과될 수 없는 비행속도 및 하중 계수로 제한된다. 구조적 손상을 방지하기 위해, 그리고 항공기의 사용 수명을 지키기 위해 조종사는 항공기를 이 “envelope” 내에서 운영해야 한다. Vg diagram은 안전한 운항을 위해 허용하는 대기속도 및 하중 계수의 조합을 설명하므로 조종사는 이를 숙지해야 한다. structural envelope를 초과하는 기동이나 돌풍이 구조적 손상을 발생시켜 항공기의 사용 수명을 단축시킬 수 있다.
Rate of Turn
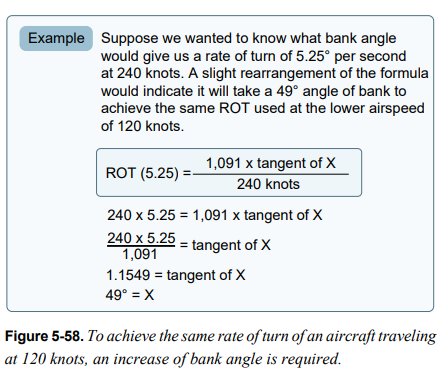
선회율은 항공기가 만드는 heading 변화율을 의미한다(초 당 도[°]로 표시됨). 선회율은 상수 1,091에 bank angle의 탄젠트를 곱한 다음 이를 특정 속도(노트)로 나누어서 구해진다. [그림 5-56] 대기속도가 증가할 때 선회율을 일정하게 유지하고자 한다면 bank angle을 증가시켜야 한다. 그렇지 않으면 선회율이 감소한다. 만약 대기속도가 일정하게 유지될 때 bank angle을 증가시키면 선회율이 증가한다. 그림 5-56 ~58의 공식은 bank angle과 airspeed가 선회율에 미치는 영향을 보여준다.
NOTE: 여기서 설명하는 모든 대기속도는 진대기속도(TAS)이다.
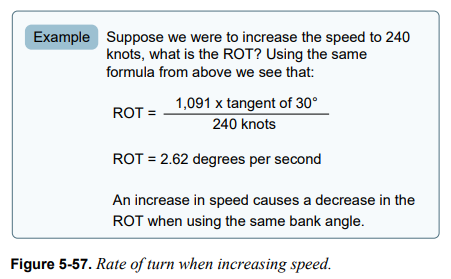
속도는 항공기의 선회율에 상당한 영향을 미친다. 만약 속도가 증가할 때 bank angle을 일정하게 유지하면 선회율이 감소한다. 따라서 속도가 증가할 때 선회율을 일정하게 유지하기 위해서는 bank angle이 증가해야 한다.
이는 실용적인 측면에서 무엇을 의미하는가? 특정 airspeed 및 bank angle이 특정 선회율을 만들어낸다면 추가적인 결론을 내릴 수 있다. 선회율을 알면 360도(원)를 이동하는데 걸리는 시간을 결정할 수 있다. 예를 들어 120노트의 airspeed와30도 bank angle에서 선회율은 초 당 5.25도이다. 이 선회율로 선회를 한 번 완료하는데 68.6초(360/5.25 = 68.6)가 걸린다. 만약 240노트의 airspeed와30도 bank angle을 사용하면 선회율은 대략 초 당 2.63도이다. 이 선회율로 선회를 한 번 완료하는데에는 약 137초가 걸린다. 즉, 대기속도가 증가하면 항공기가 호(arc)를 비행하는데 걸리는 시간이 증가한다.
그렇다면 이것을 이해하는 것이 왜 중요할까? 선회율을 이해하면 조종사는 특정 선회를 만드는데 필요한 거리를 결정할 수 있다. 이는 선회 반경에서 설명된다.
Radius of Turn
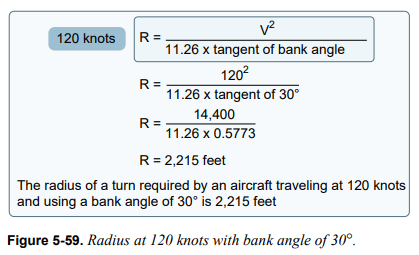
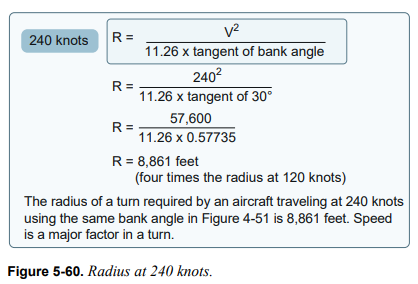
선회율은 선회 반경과 직접 연결된다. 만약 bank angle은 일정하게 유지되고 대기속도는 증가한다면 선회 반경이 증가한다. 대기속도가 높을수록 항공기는 더 긴 호를 이동한다. 120노트로 비행하는 항공기는 240노트로 비행하는 항공기보다 더 짧은은 선회 반경에서 360도 원을 선회할 수 있다. 대기속도 증가를 보상하기 위해서는 bank angle을 늘려주어야 한다.
선회 반경(R)은 간단한 공식을 통해 계산될 수 있다.
그림 5-56 ~58의 예시를 통해 두 속도에 대한 각각의 선회 반경을 계산할 수 있다.
속도가 두 배가 되면 반지름이 네 배가 됨을 주목하라. [그림 5-59 및 60]
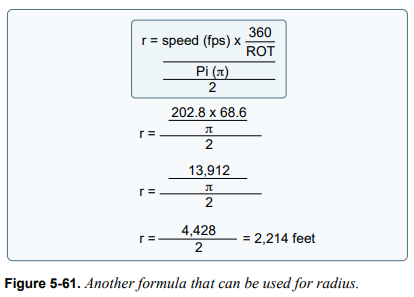
선회 반경을 결정하는 또 다른 방법은 초 당 피트(fps-feet per second) 속도, 파이(π=3.1415), 그리고 선회율을 사용하는 것이다. 초 당 5.25도의 선회율을 가진 항공기는 완전한 원을 만드는데 68.6초가 필요하다. 항공기의 속도(노트)에 상수 1.69를 곱하면 fps로 변환될 수 있다. 따라서 120노트(TAS)로 이동하는 항공기는 202.8fps로 움직인다. 완전한 원을 만드는데 걸리는 시간(68.6초)에 fps 속도(202.8)를 곱하면 원의 길이를 결정할 수 있다(202.8 x 68.6 = 13,912ft). 이를 파이(π)로 나누면 지름 4,428ft가 나오며이를 2로 나누면 반지름 2,214ft가 나온다. [그림 5-61] 이는 그림 5-59의 공식을 통해 결정된 값과 거의 동일하다.
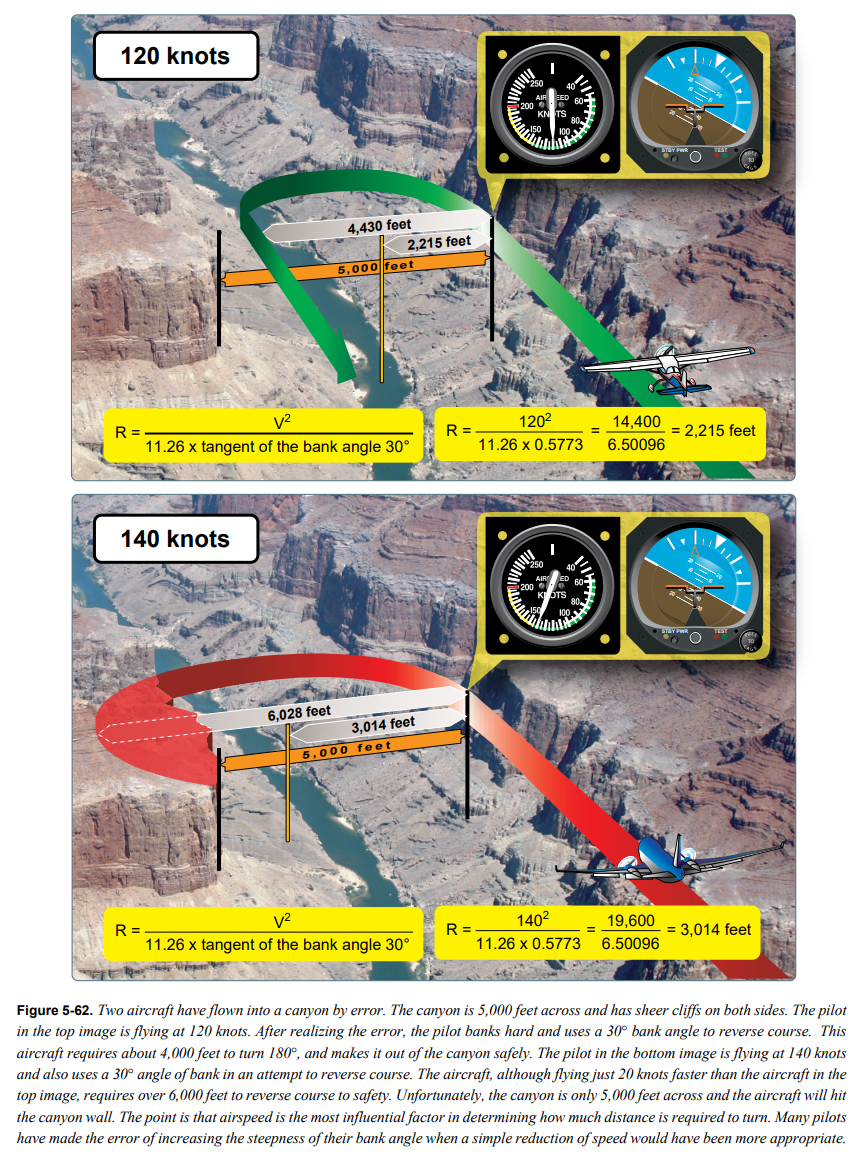
그림 5-62에서 조종사는 협곡에 진입한 다음 180도 선회를 수행하여 이곳을 빠져나가기로 결정한다. 여기서 조종사는 선회 도중 30도 bank angle을 사용한다.
항공기의 weight and balance는 조종사에게 중요한 정보이며 자주 재평가되어야 한다. 비록 항공기 증명 도중 무게가 측정되긴 하나 이 정보가 무기한 유효하지는 않다. 장비의 변경이나 수정은 weight and balance에 영향을 미친다. 조종사들은 보통 항공기의 weight and balance를 어림잡아 수행한다. (예를 들어 “만약 승객이 3명이라면 100갤런의 연료를 실을 수 있다.” 혹은 “만약 승객이 4명이라면 70갤런의 연료를 실을 수 있다.”)
weight and balance 계산이 비행 전 브리핑 도중 수행되어야 한다. 세 명의 승객이 모두 같은 무게라 가정하지 않는다. 항공기에 적재될 모든 항목을 완전히 계산한다. 여기에는 수하물, 그리고 조종사와 승객을 포함한다. 항공기 CG를 정확하게 계산하기 위하여 모든 수하물의 무게를 측정하는 것이 좋다.
CG의 중요성은 안정성, 조종성, 그리고 성능에 대한 설명에서 강조되었다. 하중 분포가 불균등하면 사고가 발생한다. 훌륭한 조종사는 CG가 항공기에 미치는 영향을 이해하며 이를 중요시한다.
weight and balance는 항공기를 제대로 활용하는데 있어 중요한 요소이다. 조종사는 무게 제한과CG 제한이 초과되지 않으면서 항공기에 얼마나 많은 연료가 적재될 수 있는지를 알아야 한다. 예를 들어 4개의 좌석을 가진, 그리고 60갤런의 연료를 실을 수 있는 항공기가 있다. 항공기는 몇 명의 승객을 안전하게 태울 수 있는가? 연료 하중의 변화에도 불구하고 모든 좌석을 항상 사용할 수 있는가? 몸무게가 각각 150파운드인 사람이 네 명 있을 때와 각각 200파운드인 사람이 네 명 있을 때의 weight and balance 계산은 다르다. 두 번째 시나리오에서는 200파운드의 추가 무게가 적재된다. 이는 약 30갤런의 연료와 같다. 추가 무게로 인해 maximum gross weight가 초과될 경우 과도한 무게가 항공기에 응력을 가하여 성능을 저하시킬 수 있다.
항공기는 두 가지 이유 때문에 weight and balance에 대하여 증명을 받는다:
1. 무게가 항공기의 1차 구조와 성능에 미치는 영향
2. 무게의 위치가 비행 특성에 미치는 영향(특히 실속 및 스핀 회복, 그리고 안정성)
Effect of Weight on Flight Performance
항공기의 이륙/상승 및 착륙 성능은 maximum allowable takeoff/landing weights에 기초하여 결정된다. 총 무게가 무거울수록 이륙 활주가 길어지고, 상승이 얕아지며,착지 속도가 빨라지고, 착륙 활주가 길어진다. 약간의 과적만으로도 항공기가 장애물을 회피하지 못할 수 있다.
과적이 성능에 미치는 나쁜 영향은 이착륙과 관련된 위험에만 국한되지 않는다. 과적은 상승/순항 성능에도 악영향을 미친다. 이는 과열, 엔진 부품 마모 증가, 연료 소모 증가, 낮은 순항 속도, 그리고 항속거리 감소로 이어진다.
항공기 제조업체는 각 항공기에 대한 weight and balance 정보를 제공한다. 보통 이 정보는 AFM/POH에서 확인할 수 있다. 여기에는 weight and balance를 결정하기 위한 쉬운 차트가 제공된다. 항공기의 성능과 하중 운반 능력을 향상시키기 위해선 제조업체의 운용 한계(operating limitations)를 준수해야 한다. 권장 사항을 벗어날 경우 항공기 구조의 구조적 손상이나 완전한 파괴가 발생할 수 있다. 항공기가 최대 무게 제한 이내로 적재되었다 하더라도 CG의 한계 이내에서 무게 분배가 이루어져야 한다. 다음은 weight and balance가 항공기의 안전에 중요한 몇 가지 이유를 설명한다.
일부 항공기의 경우 모든 좌석, 수하물 칸, 그리고 연료 탱크를 가득 채우면 weight and balance 제한 사항들을 유지하는 것이 불가능하다. 예를 들어 몇몇 4인승 항공기의 경우 4명의 탑승자와 그들의 수하물이 항공기에 적재되었을 때 연료 탱크가 최대 용량까지 채워지지 못할 수 있다. 특정 2인승 항공기로 스핀을 연습하는 경우에는 좌석의 뒤 칸에 짐을 싣지 못할 수 있다. 비행 중인 항공기의 weight and balance 제한 사항들, 그리고 이러한 제한 사항들의 이유를 인지하는 것이 중요하다.
Effect of Weight on Aircraft Structure
추가 무게가 항공기 날개 구조에 미치는 영향은 쉽게 드러나지 않는다. normal category(곡예비행이 금지된) 항공기의 구조는 기동/돌풍으로 인해 발생한 동적 하중을 처리하기 위해 3.8G의 하중 계수를 견딜 수 있을 정도로 강해야한다. 즉, 항공기의 1차 구조는 구조적 파괴 없이 항공기 총 무게의 3.8배 하중을 견딜 수 있다. 이를 항공기에 가해질 수 있는 하중 계수라 받아들일 경우 100 파운드의 과적은 380 파운드의 구조적 과부하 가능성을 부과한다. 하중 계수 조건이 각각 4.4와 6.0인 utility category와 acrobatic category 항공기의 경우 이러한 고려 사항이 훨씬 중요하다.
과적으로 인한 구조적 파괴는 치명적일 수 있다. 허나 이는 구조 요소들에 점진적으로 영향을 미쳐서 감지하기 어려울 뿐만 아니라 수리비용도 많이 든다. 습관적인 과적은 응력과 손상을 유발하는데 이는 비행 전 점검도중 발견되지 못할 수도 있다. 허나 이후 비행 도중 구조적 파괴가 발생할 수 있다. 과적이 구조적 부품에 가하는 추가 응력은 금속 피로 파괴의 발생을 가속시킨다.
비행 기동과 돌풍으로 인한 하중 계수는 항공기 총 무게 증가의 결과를 강조한다. 3G의 하중 계수를 받으려는(예를 들어 급강하로부터 회복할 때) 항공기의 구조는 100 파운드의 추가 무게마다 300 파운드의 추가 하중을 견딜 수 있도록 준비되어야 한다. 이는 약 16갤런의 불필요한 연료가 추가됨으로써 발생한다는 점에 유의해야 한다. FAA로부터 증명을 받은 민간 항공기는 비행 유형에 대해 허가된 최대 총 무게 및 특정 속도 범위에서 운영되도록 테스트를 거친다. 이러한 무게를 초과하는 상태로 비행하는 것은 충분히 가능하뎌 종종 항공기의 성능 범위 내에 있다. 허나 항공기에 대해 설계되지 않은 하중이 구조물의 전체나 일부에 부과되고 있다는 사실을 조종사가 인지하지 못할 수도 있으므로 이러한 사실을 오해해서는 안 된다.
항공기에 승객이나 화물을 적재할 때 구조를 고려해야 한다. 좌석, 수하물 칸, 그리고 객실 바닥은 특정 하중으로 설계되며 그 이상의 하중을 견딜 수 없다. 예를 들어 light plane의 수하물 칸이 20파운드로 제한될 수 있다. 이는 해당 지지 구조의 강도 한계 때문이다.
Effect of Weight on Stability and Controllability
과적은 안정성에도 영향을 미친다. 항공기가 과적될 경우 매우 다른 비행 특성을 나타낼 수 있다. 무게의 분배가 이에 가장 직접적인 영향을 미친다. 허나 항공기 CG위치에 관계없이총 무게가 증가하는 경우에도 안정성에 악영향을 미칠 수 있다. 총 무게가 초과될 경우 항공기의 안정성은 매우 불만족스러워진다.
Effect of Load Distribution
CG 위치가 날개 하중에 미치는 영향은 상승 및 순항 성능에서 중요하다. 전방으로 하중 된 항공기는 후방으로 하중 된 항공기보다 더 무거우며 그 결과 더 느리다.
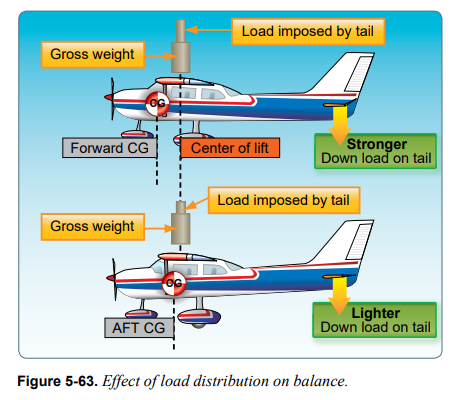
그림 5-63은 이것이 사실인 이유를 보여준다. 전방으로 하중 될 경우 대부분의 항공기는 수평 순항비행을 유지하기 위해 “nose-up” trim을 사용한다. nose-up trim은 fuselage의 뒷부분에서 더 큰 down load가 생성되도록 꼬리 표면을 설정한다. 고도를 유지하는 경우 이는 날개 하중(wing loading)과 총 양력을 증가시킨다. 이렇게 하면 날개 받음각이 더 높아져서 항력이 더 커지고 그 결과 실속 속도가 더 높아진다.
후방으로 하중 되어 “nose-down” trim이 사용될 경우 꼬리 표면은 더 적은 down load를 가한다. 이는 고도를 유지하는데 날개가 필요로 하는 날개 하중과 양력을 완화한다. 날개가 필요로 하는 받음각이 작어지므로 항력이 줄어들고 그 결과 더 높은 순항 속도가 가능하다. 이론상 순항 비행 도중 꼬리 표면에 neutral load가 가해질 때 가장 효율적인 성능과 빠른 순항 속도가 만들어진다. 허나 이는 불안정을 초래한다. 안정성과조종성을 위해현대 항공기는 꼬리에 down load가 필요하도록 설계된다. trim tab control의 zero indication이 반드시 “neutral trim”과 같지는 않다. 이는 날개와 동체의 downwash가 꼬리 표면에 가하는 힘 때문이다.
useful load의 분배는 비행 특성에 상당한 영향을 미친다(설령 하중이 CG limits 이내에 있으며 최대 총 무게 미만이라 하여도). 이러한 영향들 중 중요한 것은 조종성, 안정성, 그리고 날개에 가해지는 실제 하중의 변화이다.
보통 CG가 뒤로 이동할수록 항공기 제어가 어려워진다(특히 저속에서). 스핀을 깔끔하게 회복하는 특정 CG로부터 CG가 1 ~ 2인치 뒤로 이동할 경우 항공기가 회복 시도에 완전히 반응하지 않을 수 있다.
항공기 설계자는 보통 1회전 스핀을 회복할 수 있는 최대 지점으로부터 1인치 이내에 aft CG limit을 설정한다. utility category 항공기에 intentional spins를 허용하는 경우에는 aft CG limit가 보통 normal category에서 허용하는 지점보다 몇 인치 앞에 설정된다.
조종성에 영향을 미치는 또 다른 요인은 무거운 장비와 화물에 대한 긴 moment arms의 영향이다(이는 large aircraft의 설계에서 더욱 중요해지고 있음). 연료, 승객, 그리고 화물을 CG 근처에 집중시킴으로써, 혹은 연료와 하물을 wingtip tanks와 cargo bins(객실의 전방 및 후방)에 분산시킴으로써 항공기를 CG limits 이내에서 maximum gross weight로 적재할 수 있다.
비록 총 무게와 CG가 같더라도 하중을 분산시킨 경우에는 항공기 기동 도중, 혹은 난기류에서 수평 비행 유지 도중 더 큰 조종간 힘을 적용해야 한다. 무거운 연료/화물에 대한 긴 moment arms는 조종면 작용을 통해 극복되어야 한다. outboard wing tanks나 tip tanks가 가득 찬 항공기는 aileron controls에 덜 반응하는 경향이 있다. 반면 nose cargo bin과aft cargo bin이 가득 찬 항공기는 elevator controls에 덜 반응하는 경향이 있다.
aft CG limit은 주로 안정성을 고려하여 결정된다. 특정 속도로 비행 중인 항공기는 특정 진동 횟수 내에서 기수의 수직 편차를 감쇠시켜야 한다. 과도하게 후방으로 적재된 항공기는 이를 수행하지 못할 수 있다. 대신 기수를 순간 당겼을 때 항공기가 상승과 하강을 번갈아 수행할 수 있으며 상승과 하강이 매 진동마다 더 가팔라질 수 있다(즉, 가로축을 중심으로 발생한 세로 불안정성). 이러한 불안정성은 탑승자들을 불편하게 만들 뿐만 아니라 특정 상황에서는 항공기를 조작하기 어렵게 만든다.
CG가 뒤로 이동할수록 항공기의 실속 회복이 점점 더 어려워진다. 이는 스핀 회복에서 특히 중요하다. 왜냐하면 모든 항공기의 후방 하중에는 “flat” spin이 발생하는 특정 지점이 있기 때문이다. flat spin은 CG에 작용하는 원심력이 항공기 꼬리를 스핀 축 바깥쪽으로 당겨서 기수를 내리지 못하게 만들며 결국 회복을 불가능하게 만든다.
CG range의 후방 한계에 적재된 항공기는 선회 기동과 실속 기동을 수행할 때 다르게 조작된다. 그리고 해당 항공기는 전방 한계에 적재된 항공기와 상반되는 착륙 특성을 가진다.
forward CG limit은 여러 가지 고려 사항에 의해 결정된다. 안전을 위해 trimming device(tab이나 adjustable stabilizer)는 power off 상태에서 항공기를 정상 활공 상태로 유지할 수 있어야 한다. 항공기는 full stall, power-off landing이 가능해야 한다. 이는 비상 시 minimum landing speed를 보장하기 위함이다.tailwheel-type aircraft의 경우 기수가 과도하게 무거우면 지상 활주가 어려워진다(특히 강풍이 불면). 그리고 브레이크를 사용할 때 nose over가 쉽게 발생할 수 있으며bouncing 없이 착륙하는 것이 어려워진다. nose-wheel type aircraft의 경우 지상에서 조향 문제가 발생할 수 있다(특히 이착륙 도중). 하중 분포의 효과는 다음과 같이 요약된다:
• CG 위치는 날개의 양력 및 받음각에, 꼬리에 가해지는 힘의 양 및 방향에, 그리고 stabilizer의 편향 정도에 영향을 미친다. stabilizer가 편향되는 정도는elevator control force와의 관계 때문에 매우 중요하다.
• forward CG에서 항공기는 높은 속도일 때 실속에 빠진다. 이는 날개 하중의 증가로 인해 더 높은 속도에서 실속 받음각에 도달하기 때문이다.
• forward CG에서는 보통 더 높은 elevator control forces가 필요하다. 왜냐하면 항공기 균형을 유지하기 위해 stabilizer를 더 편향시켜야 하기 때문이다.
• aft CG에서 항공기는 더 빠르게 순항한다. 왜냐하면 받음각이 작아서 항력이 감소하기 때문이다. nose-down pitching tendency로부터 항공기를 지탱하기 위한 stabilizer 편향도 작아진다.
• CG가 뒤로 이동할수록 항공기의 안정성이 떨어진다. 왜냐하면 CG가 뒤로 이동함에 따라 받음각이 감소하며 그 결과로 항공기 안정성에 대한 날개의 기여도가 감소하기 때문이다(반면 꼬리날개의 기여도는 변하지 않는다). 날개의 기여도와 꼬리날개의 기여도가 균형을 이루는 지점에 도달하면 neutral stability가 발생한다. 여기서 CG가 더 뒤로 움직이면 항공기가 불안정해진다.
• forward CG는 back elevator pressure의 증가를 필요로 한다. 여기서 nose-down pitching이 더 증가하면 elevator가 이를 저지하지 못할 수도 있다. 대기속도 범위 내에서 항공기를 제어하기 위해선 충분한 elevator control이 필요하다.
weight and balance에 대한 자세한 설명 및 추가 정보는 Chapter 10, Weight and Balance에서 확인할 수 있다.
아음속 공기역학에서의 양력 이론은 물체, 그리고 물체가 잠겨 있는 기체(공기)에서 발생하는 힘에 기초한다. 대략 260노트 이하의 속도에서는 공기의 압력이 변화하는 동안 밀도가 거의 일정하게 유지되므로 비압축성으로 간주될 수 있다. 이러한 가정 하에서 공기는 물처럼 작용하며 유체로 분류된다. 아음속 공기역학 이론은 또한 유체 특성인 점성(유체의 한 부분이 다른 부분의 움직임을 막는 경향)을 무시할 수 있다 가정한다. 이는 또한 공기를 이상 유체 공기역학(예를 들어 continuity, Bernoulli’s principle, 그리고 circulation)의 원리에 부합하는 이상 유체로 분류한다.
사실상 공기는 압축이 가능하며 점성도 있다. 저속에서는 이러한 특성의 영향을 무시할 수 있다. 허나 속도가 증가함에 따라 압축성의 영향이 특히나 중요해진다. 압축성은 음속에 근접한 속도에서 가장 중요하다. 이러한 속도 범위에서는 압축성이 항공기 주변의 공기 밀도에 변화를 일으킨다.
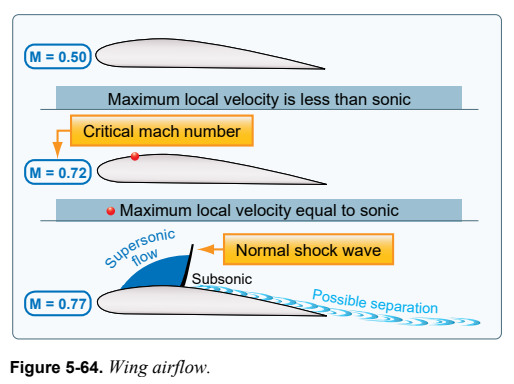
비행 도중 날개는 상부 표면 위의 공기 흐름을 가속하여 양력을 생산한다. 이 가속된 공기는 설령 항공기가 아음속으로 날고 있더라도 음속에 도달할 수 있다. 일부 항공기의 경우 극단적인 받음각일 때 날개 상단 표면 위의 공기 속도가 항공기 속도의 두 배가 될 수 있다. 따라서 항공기는 초음속과 아음속 공기 흐름을 동시에 가질 수 있다. 항공기의 특정 위치(예를 들어 날개의 maximum camber 영역)에서 유속이음속에 도달할 경우 추가적인 가속은 압축성의 영향(예를 들어 충격파 형성, 항력 증가, buffeting, 안정성, 그리고 조종 어려움)이 시작되게 만든다. 아음속 흐름의 원리는 이 지점 이상의 모든 속도에서 무효해진다. [그림 5-64]
Speed Ranges
음속은 온도에 따라 달라진다(참조: 음속의 공식은 331+0.6t 이다). 표준 온도 조건(섭씨 15도)일 경우 해수면에서의 음속은 661노트이다. 40,000ft(온도가 섭씨 –55도인 곳)에서는 음속이 574노트로 감소한다. 고속 비행 및/혹은 고고도 비행 도중에는 속도 값이 “마하수(Mach number)”로 표현된다. 마하수는 현재 대기 조건에서의 음속에 대한 항공기 TAS의 비율이다.음속으로 비행하는 항공기는 Mach 1.0으로 비행한다. 항공기의 속도 구간은 대략 다음과 같이 정의된다:
Subsonic(아음속) - 마하수 0.75 미만
Transonic(천음속) - 마하수 0.75 ~ 1.20
Supersonic(초음속) - 마하수 1.20 ~ 5.00
Hypersonic(극초음속) - 마하수 5.00 초과
군용 항공기의 경우 천음속/초음속 범위의 비행이 흔히 발생한다. 그러나 민간 제트 항공기는 일반적으로 마하 0.7 ~ 0.90의 순항 속도 범위에서 운영된다.
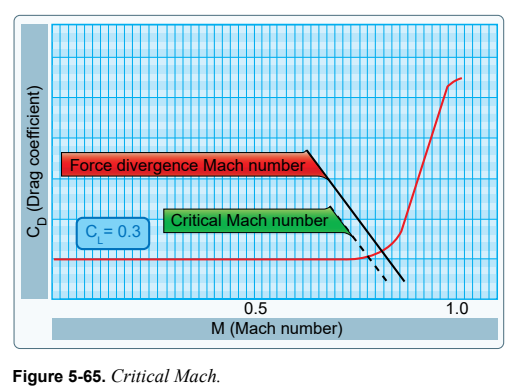
항공기나 구조물의 어느 부분에 대한 기류가 처음으로 마하 1.0에 도달하는(그러나 초과하지는 않는) 항공기 속도를 “임계 마하수(critical Mach number)”, 혹은 “Mach Crit”라 부른다. 따라서 임계 마하수는 아음속과 천음속 비행 사이의 경계이다.임계 마하수는 날개와 에어포일 설계에 따라 크게 달라진다. 임계 마하수는 천음속 비행에서 중요한 지점이다. 항공기에 충격파(shock wave)가 형성되면 흐름 분리에 이어 buffet, 그리고 항공기 조작 어려움이 발생할 수 있다. 충격파, buffet, 그리고 흐름 분리는 임계 마하수 이상에서 발생한다. 제트 항공기는 일반적으로 임계 마하수에서, 혹은 그 근처에서 순항할 때 가장 효율적이다. 임계 마하수보다 5 – 10% 높은 속도에서는 압축성의 영향이 시작된다. “항력 증가”와 연관되는 것은 buffet(ATP: 혹은 buzz), trim, 안정성 변화, 그리고 조종면 효율성 감소이다. 이 지점이 “drag divergence”이다. [그림 5-65]
VMO/MMO는 maximum operating limit speed로 정의된다. VMO는 KCAS(knots calibrated airspeed)로 표시된다. 반면 MMO는 마하수로 표시된다. VMOlimit은 일반적으로 낮은 고도에서의 운영과 관련되어 있다. 이는 구조적 하중, 그리고 flutter(흔들림)를 다룬다. MMOlimit은 높은 고도에서의 운영과 관련되어 있다. 이는 일반적으로 압축성의 영향, 그리고 flutter와 더욱 관련되어 있다. 낮은 고도에서는 구조적 하중과flutter가, 그리고 높은 고도에서는 압축성의 영향과 flutter가 우려된다.
이러한 속도를 준수할 경우 dynamic pressure나flutter로 인한 구조적 문제를, 압축성의 영향(예를 들어Mach Tuck, aileron reversal,혹은buzz)으로 인한항공기 조종 반응 저하를, 그리고 흐름 분리(충격파로 인한)로 인한 양력 손실이나 진동을 방지할 수 있다. 이러한 현상들은 조종사로 하여금 항공기를 적절하게 제어하지 못하게 만들 수 있다.
예를 들어 초기 민간 제트 항공기의 VMOlimit은 약 FL310 미만에서 306 KCAS이다(단, 표준 대기에서). FL310에서 MMO0.82는 306 KCAS와 거의 동일하다. 이 고도 이상에서는 MMO0.82가 항상 306 KCAS 미만의 속도와 같다. 따라서 MMO0.82가 운영 한계가 된다. 왜냐하면 MMOlimit에 먼저 도달하지 않고는 VMOlimit에 도달할 수 없기 때문이다. 예를 들어 FL380에서 MMO0.82는 261 KCAS 와 동일하다.
Mach Number Versus Airspeed
마하수에 따라 속도가 어떻게 변화하는지를 이해하는 것은 중요하다. 예를 들어 운송용 제트 항공기의 실속 속도가 고도 증가에 따라 어떻게 변화하는지를 생각해보라. 고도의 증가는 공기 밀도의, 그리고 외부 온도의 감소를 초래한다. 이 항공기가 clean configuration(gear/flap up) 상태이며 무게가 550,000 파운드라 가정하자. 항공기는 해수면에서 대략 152 KCAS에서 실속에 빠질 수 있다. 이는 152 KTAS, 그리고 Mach 0.23과 동일하다(단, 표준 대기에서). FL380에서 항공기는 여전히 152 KCAS에서 실속에 빠질 것이다. 허나 진대기속도와 마하수는 각각 약 287 KTAS, 그리고 Mach 0.50일 것이다.
실속 속도는 그대로 유지되지만 마하수와TAS는 모두 증가하였다. 고도가 증가함에 따라 공기 밀도가 감소한다. 동일한 KCAS에 대해 pitot tube로부터 동일한 압력을 감지하기 위해서는 더 빠른 진대기속도가 필요하다. FL380에서 287 KTAS로 비행하는 날개가 마주하는 동압은 해수면에서 152 KTAS로 비행하는 날개와 동일하다. 그러나 항공기는 더 높은 마하수로 비행하고 있다.
고려해야 할 또 다른 요인은 음속이다. 기체의 온도가 감소하면 음속이 감소한다. 따라서 고도가 상승함에 따라 외부 온도가 감소하여 음속이 떨어진다. 해수면에서는 음속이 대략 661 KCAS인 반면 FL380에서는 574 KCAS이다. 따라서 운송용 제트 항공기의 실속 속도(KTAS)가 152(해수면에서)에서 287(FL380에서)로 증가하였다. 이와 동시에 음속(KCAS)은 661에서 574로 감소하였고 마하수는 0.23(152 KTAS를 661 KTAS로 나눔)에서 0.50(287 KTAS를 574 KTAS로 나눔)으로 증가하였다. 그동안 실속에 대한 KCAS는 152로 일정하게 유지된다. 이는 고도 증가 도중 항공기가 일정한 KCAS를 유지할 때 나타나는 일을 설명한다. 그렇다면 상승 도중 마하수를 일정하게 유지한다면 어떻게 될까? 일반적인 제트 비행기의 경우 10,000ft까지는 250 KIAS로 상승한다. 그 다음 “mid-twenties” 고도에 도달하기 전까지는 특정 en route climb airspeed로 상승한다. 이후에는 일정한 마하수로 순항 고도까지 상승한다.
설명을 위해 해수면으로부터 FL380까지 MMO0.82로 상승한다 가정하자. KCAS는 543에서 261로 향한다. 각 고도에서의 KIAS 또한 같은 양상을 따를 것이며 KCAS와 단지 몇 노트만 차이난다. 항공기가 상승함에 따라 온도가 떨어지면서 음속이 감소함을 상기하라. 마하수는 현재 비행 조건에서의 진대기속도 대 음속의 비율이다. 여기서 중요한 것은 일정한 마하수로 상승 도중 KCAS(그리고 KTAS나 KIAS 또한)가 떨어지고 있다는 것이다.
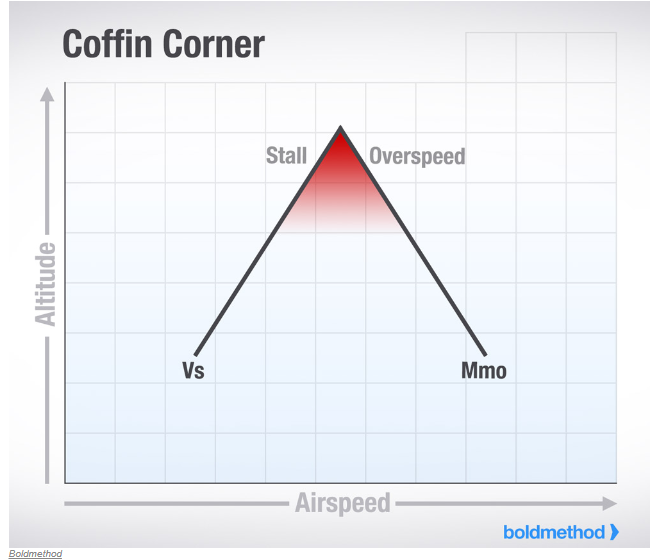
만약 KIAS∙KCAS∙KTAS의 감소와 함께 이러한 일정 MMO로 충분히 높게 상승한다면 항공기는 실속 속도에 접근하기 시작할 것이다. 어느 시점에서 항공기 마하수 단위 실속 속도가MMO와 같을 수 있다. 이때 조종사는 감속을 할 수 없으며(실속 때문에) 가속을 할 수도 없다(항공기의 max operating speed 때문에). 이를 “coffin corner”라 부른다.
(출처: boldmethod)
Boundary Layer
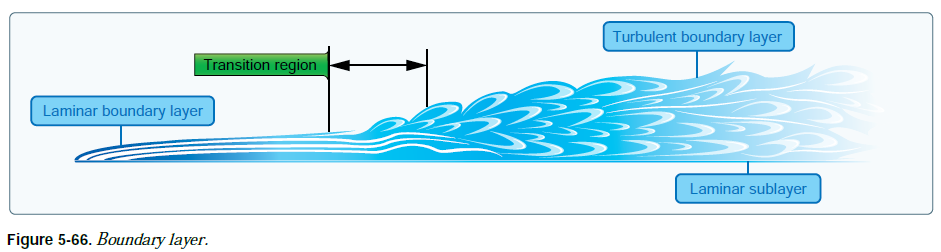
공기의 점성 특징은 표면의 일부 지점 속도를 감소시켜 표면 마찰을 유발한다. 이전 장에서 논의한 바와 같이 날개 표면에서 점성에 의해 느려지거나, 혹은 멈추는 공기 층이 경계층이다. 경계층 흐름에는 두 가지 유형이 있다: 층류와 난류.
Laminar Boundary Layer Flow
층류 경계층은 매우 매끄러운 흐름이다. 반면 난류 경계층은 소용돌이를 포함한다. 층류는 난류보다 표면 마찰 항력이 적지만 안정성이 떨어진다. 날개 표면 위의 경계층 흐름은 매끄러운 층류에서 시작된다. 흐름이 앞전으로부터 뒤로 진행됨에 따라 층류 경계층의 두께가 증가한다.
Turbulent Boundary Layer Flow
앞전으로부터 어느 정도 떨어진 지점에서 매끄러운 층류가 분해되어 난류로 전환된다. 항력의 관점에서 볼 때 층류에서 난류로의 천이(transition)가 최대한 뒤쪽에서 이루어지는 것이, 혹은 많은 날개 표면이 경계층의 층류 이내에 있는 것이 좋다. 그러나 층류의 낮은 에너지는 난류 층보다 더 갑작스럽게 분해되는 경향이 있다.
Boundary Layer Separation
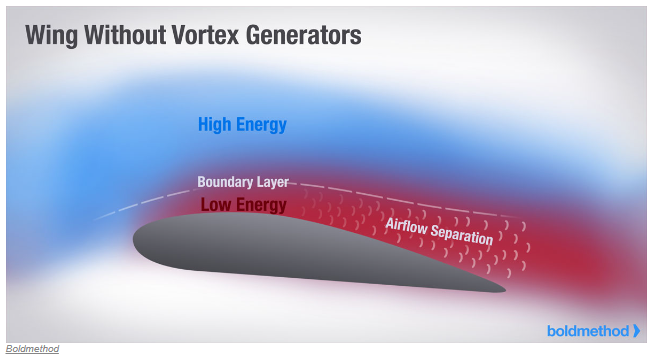
점성 유동과 관련된 또 다른 현상은 분리(separation)이다. 분리는 공기 흐름이 에어포일로부터 박리될 때 발생한다. 층류 경계층에서 난류 경계층으로, 그 다음에는 흐름 분리로 이어지는 것이 자연스러운 진행 단계이다. 흐름 분리는 높은 항력을 생성하며 궁극적으로 양력을 파괴한다. 경계층 분리 지점은 받음각이 증가함에 따라 날개 전방으로 이동한다. [그림 5-66]
(ATP: 높은 받음각에서 경계층은 정체 및 정지하려는 경향이 있다. 이러한 상황에서 공기 흐름은 표면으로부터 분리되어 상부 표면 주위를 순환한다. 그리고 실속이 발생한다.)
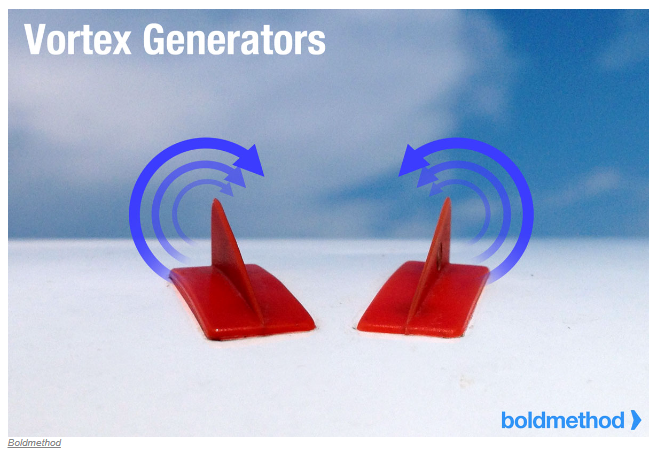
vortex generator는 천음속(transonic) 비행 도중 충격파(shock wave)로 인한 경계층 분리를 지연, 혹은 방지하기 위해 사용된다. 이들은 공기 흐름에 대해 12 ~ 15도의 받음각으로 배치되는 낮은 가로세로비의 에어포일이다. 이는 일반적으로 aileron, 혹은 그 외 조종면의 전방을 따라 수인치 간격으로 위치된다. vortex generator는 와류를 생성하는데, 이 와류는 항공기 표면 바로 위의 높은 에너지 기류를 경계층과 혼합한다. 이는 더 높은 표면 유속을 형성하며 경계층의 에너지를 증가시킨다. 이로 인해 흐름 분리가 만들어지기 위해서는 더 강한 충격파가 필요해진다.
(출처: boldmethod)(출처: boldmethod)(출처: boldmethod)
(ATP: 날개에 장착된 vortex generators는 날개의 초음속 기류에 의한 항력을 감소시킨다. 이는 고속에서의 drag divergence를 지연시키며 aileron effectivenss를 유지하는데 도움을 제공한다.)
(ATP: 느린 속도의 laminar airflow를 빠른 속도로 대체하는 다양한 방법을 통해 날개의 흐름 분리를 지연할 수 있다. 한 가지 방법은 vortex generators를 사용하는 것이다. 이는 날개의 윗면에 부착되어 있다. vortex generators는 날개 표면을 거칠게 만들어 난류 흐름을 만드는데, 이는 공기의 속도를 증가시킨다. 또 다른 방법은 slots를 통해 고압의 공기를 날개, 혹은 flap의 위로 향하게 만드는 것이다.)
Shock Waves
비행기가 아음속으로 비행할 경우 전방의 공기는 비행기가 다가오고 있음을 “경고” 받는다. 이는 소리의 속도(음속)로 비행기 앞에 전달되는 압력 변화 덕분이다. 이러한 경고 때문에 공기는 비행기가 도착하기 전에 옆으로 이동하기 시작함으로써 항공기가 쉽게 지나가도록 준비된다. 비행기의 속도가 음속에 도달하면 압력 변화가 더 이상 전방의 공기에 경고를 줄 수 없다. 왜냐하면 비행기가 그 자체의 압력파를 따라가고 있기 때문이다. 더 정확히 말하면 공기 입자들이 비행기 앞에서 쌓인다. 이는 비행기 바로 앞부분의 기압/밀도 상승과 함께 유속의 급격한 감소를 초래한다.
비행기의 속도가 음속을 초과하면 전방 압축 공기의 압력/밀도가 증가한다. 이로 인해 비행기 전방의 어느 정도 거리까지 압축 영역이 확장된다. 기류의 어느 시점에서는 비행기의 접근에 대한 사전 경고가 없었기 때문에 공기 입자는 완전히 방해받지 않는다. 다음 순간 공기 입자들은 온도, 압력, 밀도, 그리고 속도에 대해 급격한 변화를 겪는다. 방해받지 않는 공기와 압축 공기 사이의 경계를 충격파(shock wave), 혹은 압축파(compression wave)라 부른다. 초음속 기류가 방향 변화 없이 아음속으로 느려질 때에도 이와 같은 종류의 wave가 형성된다(예를 들어 날개의 캠버 부분 위를 지나는 기류가 음속으로 가속된 이후 maximum camber를 지나면서 아음속으로 감속할 때). 충격파는 초음속 범위와 아음속 범위 사이의 경계로서 형성된다.
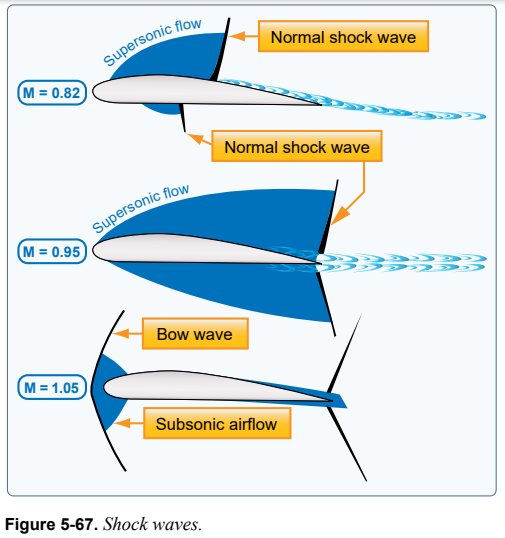
충격파가 기류에 수직으로 형성될 경우 이를 “normal” shock wave라 부른다. wave의 바로 뒤에 있는 흐름은 아음속이다. normal shock wave를 통과하는 초음속 기류는 다음과 같은 변화를 겪는다:
• 기류가 아음속으로 느려진다.
• 충격파 바로 뒤의 공기 흐름은 방향을 바꾸지 않는다.
• wave 뒤에 있는 기류의 정압/밀도가 크게 증가한다.
• 기류의 에너지(총압 = 동압 + 정압)는 크게 감소한다.
충격파 형성으로 인해 항력이 증가한다. 충격파의 주요 영향 중 하나는 wave의 바로 뒤에 높은 압력 영역이 형성되는 것이다. 높은 압력 영역의 불안정성, 그리고 기류의 속도 에너지 중 일부가 wave를 통과하면서 열로 변환된다는 점이 항력 증가의 기여 요인이다. 그러나 흐름 분리로 인한 항력이 훨씬 크다. 충격파가 강한 경우 경계층은 흐름 분리를 견딜 수 있는 충분한 운동 에너지를 갖지 못할 수 있다. 충격파의 형성, 그리고 흐름 분리로 인해 천음속 영역에서 발생하는 항력을 “조파 항력(wave drag)”이라 부른다. 속도가 임계 마하수의 약 10%를 초과하면 조파 항력이 급격하게 증가한다. 이 지점을 넘어 초음속 범위를 향해 비행 속도를 높이려면 추력(출력)의 상당한 증가가 필요하다. 여기에서 에어포일의 모양, 그리고 받음각에 따라 경계층이 다시 부착될 수 있다.
normal shock wave가 날개의 상부 표면에 형성된다. 그리고 아래 표면에 추가적인 초음속 흐름 영역과 normal shock wave가 형성된다. 비행 속도가 음속에 가까워질수록 초음속 흐름 영역이 커진다. 그리고 충격파는 뒷전 근처로 이동한다. [그림 5-67]
“항력 증가”는 buffet(Mach buffet), trim과 stability의 변화, 그리고 조종면 효율성 감소와 관련이 있다. 흐름 분리로 인한 양력 손실은 downwash의 감소를, 그리고 날개 양력 중심 위치의 변화를 초래한다. 흐름 분리는 날개 뒤쪽에 난류 후류(turbulent wake)를 형성한다. 이는 꼬리 표면을 buffet(진동)하게 만든다. 수평 꼬리가 제공하는 nose-up/nose-down pitch control은 날개 뒤쪽의 downwash에 따라 달라진다. 따라서 downwash의 감소는 수평 꼬리의 pitch control effectiveness를 감소시킨다. CP의 이동은 날개의 pitching moment에 영향을 미친다. 만약 CP가 뒤로 이동하면 “Mach tuck”, 혹은 “tuck under”라 불리는 하강 모멘트가 생성된다. 만약 CP가 앞으로 이동하면 nose-up 모멘트가 생성된다. 이는 많은 터빈 항공기에서 T-tail 구성(수평 안정판을 날개의 난기류로부터 가능한 한 멀리 떨어뜨리는)을 개발하는 주요 이유이다.
Sweepback
천음속 비행의 어려움은 충격파로 인한 흐름 분리와 관련되어 있다. 따라서 흐름 분리를 지연시키거나, 혹은 완화하는 모든 수단이 공기역학적 성능을 향상시킨다. 한 가지 방법은 날개 후퇴각(sweepback)이다. 후퇴각 이론은 다음과 같은 개념에 기초한다: 기압 배치와 충격파 형성에 영향을 미치는 것은 오직 날개 앞전에 수직인 공기 흐름 성분만이다. [그림 5-68]
직선익 항공기에서는 기류가 날개 앞전을 90도로 타격한다. 이 전체 충격은 압력과 양력을 발생시킨다. 후퇴각이 있는 날개는 90도보다 작은 각도에서 공기 흐름을 타격한다. 후퇴각의 기류는 날개로 하여금 실제보다 더 느리게 날고 있다 여겨지게 만든다. 따라서 충격파의 형성이 지연된다. 날개 후퇴각의 장점으로는 임계 마하수의 증가, force divergence Mach number의 증가, 그리고 항력 발산이 정점이 되는 마하수의 증가 등이 있다. 즉, 후퇴각은 압축성의 영향이 시작되는 것을 지연시킨다.
(ATP: 천음속 항공기가 후퇴각을 사용하면 drag rise가 지연 및 감소한다. 또한 천음속 비행 도중 기동성을 유지시켜준다. 약간의 후퇴각은 이점을 거의 제공하지 않는다. 최소한 30 ~ 35도의 후퇴각을 사용해야 상당한 이점을 얻을 수 있다.)
항력 계수의 급격한 변화를 일으키는 마하수를 “force divergence” Mach number(ATP: 혹은 drag rise)라 부른다. 대부분의 에어포일에서 이는 일반적으로 임계 마하수보다 5 ~ 10% 높다. 이 속도에서의 충격파 형성으로 인한 흐름 분리는 항력, 양력, 혹은 pitching moment 계수에 상당한 변화를 일으킬 수 있다. 후퇴각은 압축성의 영향을 지연시킬뿐만 아니라 항력, 양력, 혹은 모멘트 계수의 변화 정도도 줄여준다. 즉, 후퇴각을 사용하면 force divergence가 약해진다.
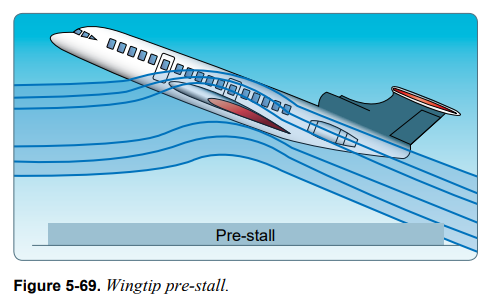
후퇴각의 단점은 실속이 wing roots가 아닌 wingtips에서 발생하는 경향이 있다는 것이다. [그림 5-69] 왜냐하면 경계층은 tips를 향해 날개 길이(spanwise) 방향으로 흐르려는 경향이 있으며 앞전 근처에서 분리되는 경향이 있기 때문이다. 후퇴각 날개의 tips는 날개의 뒷부분(CL의 뒷부분)에 있다. 따라서 wingtip stall은 CL을 앞으로 이동시켜 기수가 더 위로 향하게 만든다. tip stall의 경향은 후퇴각과 테이퍼가 결합될 경우 가장 크다.
(ATP: 후퇴익 비행기의 wingtips에서 먼저 shock-stall이 발생한 경우 양력 중심은 안쪽으로, 그리고 앞쪽으로 이동한다.)
(ATP: 후퇴익 비행기의 wing root에서 shock-induced separation이 발생한 경우 양력이 손실된다. 이로 인해 수평꼬리의 downwash가 감소하여 diving moment가 형성될 것이며 항공기에 "Mach tuck"이 발생할 것이다.)
실속 상황은 T-tail에 의해 악화될 수 있다. 이러한 구성은 꼬리 조종면의 buffet을 통한 사전 실속 경고를 거의, 혹은 전혀 제공하지 않는다. [그림 5-70] T tail은 날개가 실속에 빠지기 시작한 이후에도 wing wake 위에 있어서 여전히 효과적이다. 때문에 조종사가 실수로 날개를 훨씬 더 높은 받음각의 실속으로 향하게 만들 수 있다. 만약 수평 꼬리표면이 날개의 후류에 묻히게 되면 elevator effectiveness가 사라질 수 있다. 이로 인해 pitch attitude 감소를 통한 실속 회복이 불가능할 수 있다. pre-stall/post-stall 구간에서의 후퇴각 항공기 양력/항력 특성은 pitch attitude의 변화가 없는 상태에서 점점 더 하강하는 비행경로를 만들어내 받음각을 더욱 증가시킬 수 있다(특히 저속에서 항력이 엄청나게 증가한 상태에서). 이러한 상황에서 만약 신뢰할만한 받음각 정보가 없다면 nose-down pitch attitude와 속도 증가가 회복에 영향을 미치고 있음을 보장하지 못한다. 또한 이 단계에서 up-elevator는 항공기를 실속 상태로 유지할 수 있다.
극단적인 nose-high attitudes로 실속에 빠져있을 경우 기수가 급격히 상승하여 회복이 어려워지는 것이T-tail aircraft의 특징이다. stick pusher는 이러한 유형의 실속을 억제한다. 실속 속도보다 약 1노트 높은 지점에서 pre-programmed stick force가 자동으로 조종간을 앞으로 움직여서 실속이 발생하는 것을 방지한다. stick pusher에 의해 생성된 pitch down이 항공기에 과도한 하중을 가하는 것을 방지하기 위하여 G-limiter가 시스템에 통합될 수도 있다. 반면 “stick shaker”는 대기 속도가 실속 속도보다 5 ~ 7% 높을 때 실속 경고를 제공한다.
Mach Buffet Boundaries
mach buffet은 날개 위를 흐르는 공기 속도의 함수이다. 대기 속도가 너무 빠른 경우, 혹은 MMO 근처에서 받음각이 너무 높은 경우에는 날개에 너무 많은 양력 수요가 발생하여 “high-speed” buffet이 일어난다. buffet을 훨씬 더 낮은 속도에서 경험할 수도 있다. 이를 “low-speed Mach buffet”이라 부른다.
무게 및 고도에 비해 너무 느린 속도로 비행하여 높은 받음각이 필요한 경우 low-speed Mach buffet이 발생할 가능성이 가장 높다. 이러한 높은 받음각은 날개 윗면의 기류 속도를 증가시키는 효과가 있다(단, high-speed buffet 상황에서와 동일한 충격파 및 buffet이 발생하기 전까지). 날개의 받음각은 항공기의 high-speed boundary, 혹은 low-speed boundary에서 Mach buffet을 유도하는데 가장 큰 영향을 미친다. 받음각, 날개 위 공기 흐름 속도, 그리고 Mach buffet 가능성을 증가시키는 조건은 다음과 같다:
∙ High altitudes – 항공기가 더 높이 날수록 공기가 희박해진다. 따라서 수평 비행 유지를 위한 양력을 생산하는데 요구되는 받음각이 더 커진다.
∙ Heavy weights – 항공기가 무거울수록 날개에 필요한 양력이 커진다. 다른 모든 요소가 동일하다면 받음각이 더 커진다.
∙ G loading – 항공기의 G loading 증가는 항공기의 무게가 증가하는 것과 동일한 영향을 미친다. G force의 발생 원인이 무엇이든(선회, 거친 조종간 사용, 혹은 난기류) 상관없이 날개 받음각 증가의 효과는 동일하다.
High Speed Flight Controls
고속 항공기의 경우 flight controls가 primary flight controls와 secondary(혹은 auxiliary) flight controls로 나뉜다. primary flight controls는 pitch, roll, 그리고 yaw 축을 중심으로 항공기를 조종한다. 여기에는 ailerons, elevator, 그리고 rudder를 포함한다. secondary(혹은 auxiliary) flight controls는 tabs, leading edge flaps, trailing edge flaps, spoilers, 그리고 slats를 포함한다.
spoilers는 날개의 상부 표면에서 사용된다. 이는 양력을 감소키기 위해 사용된다. 고속 항공기는 항력이 낮도록 설계되기 때문에 감속을 위한 speed brakes로서 spoiler를 사용한다. 착륙 직후 spoilers를 연장하여 양력을 감소시키면 항공기의 무게가 날개로부터 바퀴로 전달된다. 이는 더 나은 제동 성능을 위함이다. [그림 5-71]
운송용 제트 항공기는 작은 ailerons를 가진다. ailerons를 위한 공간은 제한적이다. 왜냐하면 flaps를 위해 날개 뒷전이 최대한 많이 필요하기 때문이다. 또한 종례의 aileron 크기는 고속에서 날개 비틀림을 유발할 수 있다. 이러한 이유로 spoilers가 ailerons와 함께 사용되어 부가적인 roll control을 제공한다.
일부 운송용 제트 항공기는 두 세트의 ailerons를 가진다: 한 쌍의 outboard low-speed ailerons, 그리고 한 쌍의 high-speed inboard ailerons. 이륙 후 flaps가 완전히 접히면 outboard ailerons는 자동으로 faired position(유선형으로 되는 위치)에 고정된다. (ATP: 고속에서 outboard ailerons를 사용할 경우 공기역학적 하중이 wingtips를 비튼다. 때문에 outboard ailerons는 저속에서만 사용된다. inboard ailerons는 저속 및 고속에서 사용된다.)
roll control을 위해 spoilers를사용할 경우 up aileron 쪽 spoiler가 연장된다. 이는 해당 부분의 양력을 감소시켜 날개가 떨어지게 만든다. spoilers가 speed brakes로서 연장된 상태에서도 여전히 roll control을 위해 사용될 수 있다. 만약 spoilers가 differential type이라면 한쪽은 더 확장되고 다른 한 쪽은 접힌다. 만약 spoilers가 non-differential type이라면 한쪽은 더 확장되나 다른 한쪽은 접히지 않는다. non-differential spoilers가 speed brakes로서 완전히 연장된 상태일 경우 이는 ailerons를 보조하지 않는다.
매끄러운 실속, 그리고 흐름 분리 없이 높은 받음각을 얻기 위해서는 날개의 앞전이 둥글고 뭉툭한 모양이어야 한다. 이로 인해 공기 흐름이 높은 받음각에서도 부착될 수 있다. 이 모양을 사용하면 흐름 분리가 뒷전에서 시작되며 받음각이 증가함에 따라 점점 앞으로 진행된다.
고속 비행에 필요한 날카로운 앞전은 갑작스러운 실속을 초래하며trailing edge flaps의 사용을 제한한다. 왜냐하면 공기 흐름이 날개 앞전 주위의 날카로운 곡선을 따라 흐르지 못하기 때문이다. 적당한 받음각일 때 공기 흐름이 상부 표면에서 갑자기 분리되려는 경향이 있다. trailing edge flaps를 활용하여 CL-MAX를 증가시키기 위해선 날개가 흐름 분리 없이 높은 받음각으로 이동해야 한다. 따라서 이륙, 상승, 그리고 착륙 도중의 저속 특성을 향상하기 위해 leading edge slots∙slats∙flaps가 사용된다. 이러한 장치들은 trailing edge flaps만큼 강력하지는 않다. 허나 trailing edge flaps와 함께 이들이 전체 날개 길이에 걸쳐 사용될 경우 매우 효과적이다. 이러한 고양력 장치 덕분에 흐름 분리가 지연되며 CL-MAX가 상당히 증가한다. 실제로 실속 속도가 50노트 감소하는 것이 일반적이다.
대형 운송용 제트 항공기의 운영 조건들은 많은 pitch trim 변화를 요한다. 몇 가지 운영 조건들은 다음과 같다:
∙ 넓은 CG 범위
∙ 넓은 속도 범위
∙ leading edge/trailing edge high-lift devices의 사용으로 인한 많은 trim 변화를 수행할 수 있는 능력(단, 남아 있는 elevator의 양을 제한하지 않으면서)
∙ trim drag를 최소로 유지
이러한 조건들은 variable incidence horizontal stabilizer를 사용함으로써 만족된다. fixed-tail aircraft의 경우 많은 trim 변화는 많은 elevator 조작을 필요로 한다. 이렇게 조작이 커질 경우 같은 방향을 향한 elevator 움직임이 거의 남지 않는다. variable incidence horizontal stabilizer는 trim 변화를 줄이기 위해 설계되었다. stabilizer는 elevator보다 크다. 따라서 큰 각도로 움직일 필요가 없다. 이는 elevator로 하여금 꼬리 날개에 유선형으로 놓이게 해주며 위아래로 최대 범위까지 이동할 수 있게 해준다. variable incidence horizontal stabilizer는 대부분의 pitch control이 처리되도록, 그리고 나머지는 elevator에서 처리되도록 설정될 수 있다. variable incidence horizontal stabilizer를 장비한 항공기의 elevator만을 따로 떼어서 보면 fixed-tail aircraft의 것에 비해 더 작으며 덜 효과적이다. 다른 조종면과 비교하였을 때 variable incidence horizontal stabilizer는 그 효과가 매우 강력하다.
운송용 제트 항공기의 크기, 그리고 높은 속도 때문에 조종면을 움직이는데 필요한 힘이 조종사의 힘을 초과할 수 있다. 따라서 조종면은 유압, 혹은 전기 동력 장치에 의해 작동한다. 조종실에서 조종간을 움직이면 조종 각도가 신호로 보내진다. 그리고 동력 장치가 조종면을 특정한 위치에 둔다. 동력 장치가 완전히 고장 난 경우 control tabs를 직접 제어함으로써 조종면의 움직임에 영향을 미칠 수 있다. control tab을 움직이면 공기역학적 균형이 깨져서 조종면이 움직인다.
(ATP: manual reversion이라고 불리는 이러한 수동 백업이 control tabs를 연결한다. 조종사는 조종간을 움직여 control tabs를 조작할 수 있다. 이를 통해 조종면이 움직인다.)
항공기를 비행하기 위해선 추력, 항력, 양력, 그리고 무게가 항공기에 어떻게 영향을 미치는지 이해해야 한다. 설계∙무게∙하중 계수∙중력이 기동 중인 항공기에 어떻게 영향을 미치는지 이해하고 공기역학을 이해함으로써 조종사는 이러한 힘들 사이에서 균형을 제어하는 방법을 배운다. 실속 속도, 하중 계수, 그리고 그 외 중요한 항공기 정보들은 항상 AFM/POH를 참조한다.