Analog Pictorial Displays
Horizontal Situation Indicator(HSI)
HSI는 flux valve를 사용하여 다이얼을 움직이는 direction indicator이다. 이러한 계기는 magnetic compass를 항법 신호, 그리고 glideslope과 결합한다. [그림 5-38] 이는 선택한 course와 관련된 항공기 위치를 조종사에게 알려준다.
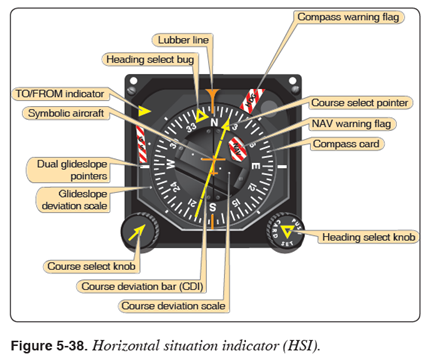
lubber line 아래의 azimuth card가 지시하는 항공기 heading은 북쪽(혹은 360도)이다. course-indicating arrowhead는 020로 설정되어 있다(tail은 그 반대인 200을 나타냄). course deviation bar는 VOR/Localizer(VOR/LOC) 항법 수신기와 함께 작동한다. 이는 course-indicating arrow로 선택된 course로부터 왼쪽, 혹은 오른쪽으로 벗어났는지를 나타낸다(종례의 VOR/LOC 지시침이 각을 이루어 움직이는 것과 동일한 방식).
course select knob를 사용하여 course-indicating arrow를 회전시켜 원하는 course를 선택한다. 이를 통해 조종사가 아래를 내려다보고 있는 그림을 보여준다(고정된 aircraft symbol과 course deviation bar는 조종사가 선정한 course에 대한 항공기 위치를 나타냄). TO/FROM indicator는 삼각형 모양의 지표이다. 이것이 course arrow의 머리를 가리킬 경우 조종사가 선정한 course를 제대로 intercept하였을 시 조종사가 선정한 시설로 항공기가 이동함을 나타낸다. 반면 이것이 course arrow의 꼬리를 가리킬 경우 조종사가 선정한 course를 제대로 intercept하였을 시 조종사가 선정한 시설로부터 항공기가 곧장 멀어짐을 나타낸다.
glideslope deviation pointer는 glideslope와 항공기의 관계를 나타낸다. pointer가 중앙으로부터 아래에 있을 경우 항공기는 glideslope 위에 있으므로 하강률을 증가해야 한다. 대부분의 azimuth card는 fluxgate에 의해 작동하는 remote indicating compass이다. 만약 fluxgate가 설치되지 않았거나, 혹은 비상 상황일 경우 주기적으로 magnetic compass와 heading을 확인해야 하며 heading select knob를 통해 다시 설정한다.
Attitude Direction Indicator(ADI)
자세 계기의 발전을 통해 gyro horizon을 다른 계기들(예를 들어 HSI)과 결합하였다. 이는 조종사가 주의를 기울여야 할 별도의 계기 수를 줄였다. ADI는 이러한 기술 발전의 한 예시이다. flight director는 시스템 내에 ADI를 통합한다. ADI에 반드시 command cues가 장착되어야 하는 것은 아니지만 일반적으로 이 기능이 탑재된다.
Flight Director System(FDS)
FDS는 하나의 디스플레이에 다수의 계기를 결합한다. 이는 항공기의 비행경로를 쉽게 해석할 수 있는 정보를 제공한다. FDS가 계산한 해결책은 조종사가 원하는 경로를 유지하는데 필요한 조종 명령을 제공한다.
FDS의 주요 구성 요소로는 ADI(FDI - Flight Director Indicator라고도 불림), HSI, mode selector, 그리고 flight director computer를 포함한다. flight director를 사용하여 비행하는 것이 autopilot에 의해 조종되고 있음을 의미하지는 않음을 유념한다. 대신 이는 조종사(혹은 autopilot)가 따라야 할 조종 명령을 제공한다.
일반적인 flight directors는 조종을 위해 두 개의 디스플레이 시스템 중 하나를 사용한다. 첫 번째는 horizon bar와 vertical bar가 합쳐진 것이다. 이러한 command bars는 중앙 위치에서 유지된다. 두 번째는 command cue에 정렬된 miniature aircraft를 사용한다.
flight director는 조종 명령을 ADI에 표시한다. flight director는 다양한 계기들 중 하나로부터 신호를 수신한 다음 조종 명령을 위해 이를 ADI에 제공한다. mode controller는 ADI에 신호를 전달하여 steering bars를 구동한다(예를 들어 steering bar의 V 모양에 delta symbol이 위치하도록 항공기를 조종한다). “Command” indicator는 조종사가 원하는 결과를 얻기 위해 항공기 자세를 어느 방향으로 얼마나 변경해야 하는지를 알려준다.
command bar의 지시는 계기 비행에 필요한 많은 계산들을 덜어준다. ADI의 cue는 모든 조종 명령을 조종사에게 제공한다. [그림 5-39] 이는 항법 시스템, ADC, AHRS, 그리고 기타 데이터 소스로부터 정보를 수신하는 컴퓨터에 의해 구동된다. 컴퓨터는 이 정보를 처리하여 조종사가 따라야할 cue를 제공한다. 이는 조종사가 원하는 경로를 유지하는데 필요한 3차원 비행 궤적을 제공한다.

처음에 널리 사용된 flight directors 중 하나는 Sperry에 의해 개발되었다. 이는 Sperry Three Axis Attitude Reference System(STARS)라 불리었다. 1960년대에 개발된 이것은 일반적으로 상업용 항공기와 비즈니스용 항공기에서 사용되었다. STARS와 이후의 flight directors는 autopilots, 그리고 fully integrated flight system을 제공하는 항공기와 통합되었다.
아래에 설명된 flight director/autopilot system은 많은 범용항공 항공기에 설치되는 전형적인 시스템이다. 일반적인 flight director의 구성 요소는 mode controller, ADI, HSI, 그리고 annunciator panel이다. [그림 5-40]
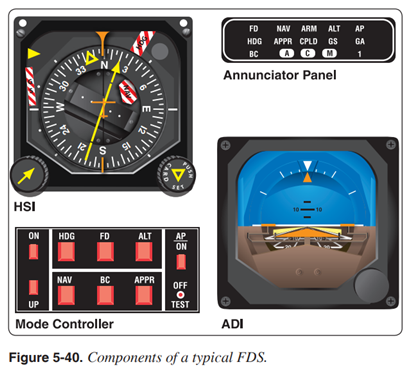
조종사는 HDG(heading) mode, VOR/LOC(localizer tracking) mode, 혹은 AUTO Approach(APP) or G/S(ILS localizers와 glidepath를 자동으로 capture 및 tracking) mode들 중 선택할 수 있다. auto mode에는 fully automatic pitch selection computer가 있다. 이는 항공기 성능과 바람을 고려하며 조종사가 ILS glideslope에 도달하였을 때 작동한다. 더욱 복잡한 시스템은 더 다양한 flight director modes를 허용한다.
Integrated Flight Control System
integrated flight control system은 다양한 시스템들을 통합하여 하나의 주요 구성 요소에 의해 작동 및 제어되도록 만든다. 그림 5-41은 항공기 동체, autopilot, 그리고 FDS로 구성된 fully integrated system으로 처음에 개발된 flight control system의 주요 구성 요소들이다. 한 대 대형 commercial aircraft에서만 볼 수 있었던 이러한 시스템은 이제 범용항공에서도 보편화되고 있다.

Autopilot Systems
autopilot은 전기, 유압, 혹은 디지털 시스템을 사용하여 항공기를 제어하는 기계적 수단이다. autopilot은 항공기의 세 가지 축을 조종할 수 있다: roll, pitch, 그리고 yaw. 범용항공의 autopilots는 대부분 roll과 pitch를 조종한다.
autopilots는 서로 다른 방법을 통해 작동한다. 첫 번째는 position based이다. 즉 attitude gyro는 position(예를 들어 wing level)에서의 변화 정도, pitch의 변화 정도, 혹은 heading의 변화 정도를 감지한다.
autopilot의 설계가 position base인지, 혹은 rate base인지를 결정하는 것은 autopilot에 사용되는 센서의 유형에 따라 달라진다. autopilot이 항공기의 자세(즉 roll과 pitch)를 제어할 수 있는 능력을 갖추기 위해서는 그 시스템에 해당 항공기의 실제 자세에 대한 정보가 지속적으로 제공되어야 한다. 이는 여러 가지 유형의 자이로스코프 센서를 사용함으로써 이루어진다. 일부 센서는 수평선에 연관된 position의 형태로 항공기의 자세를 나타내도록 설계된 반면 그 외의 센서는 rate(시간에 따른 position 변화)를 나타내도록 설계된다.
rate-based systems는 autopilot system을 위해 turn-and-bank sensor를 사용한다. autopilot은 항공기의 3개 축 중 2개의 축에 대한 rate 정보를 사용한다: 수직 축에 대한 움직임(heading, 혹은 yaw의 변화)과 세로 축(roll)에 대한 움직임. 자이로의 축이 항공기 세로축으로부터 30도 각을 두게 설치함으로써 하나의 센서가 이러한 조합된 정보들을 사용할 수 있다.
다른 시스템들은 position based information과 rate based information을 모두 사용하여 두 시스템의 특성을 모두 활용한다(반면 최신의 autopilots는 디지털이다). 그림 5-42는 Century의 autopilot을 나타낸다.
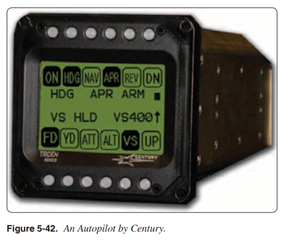
그림 5-43은 S-Tec의 rate-based autopilot의 도표이다. 구매자는 기본적인 wing leveling에 모듈식 기능을 추가하여 기능들을 추가할 수 있다.

'Instrument Flying Handbook(2012) > 5: Flight Instruments' 카테고리의 다른 글
| (7) Gyroscopic Instruments (0) | 2023.02.17 |
|---|---|
| (8) Flight Support Systems (0) | 2023.02.17 |
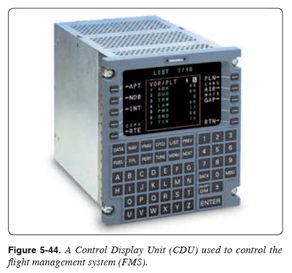
| (10) Flight Management Systems (0) | 2023.02.17 |
| (11) Primary Flight Display (0) | 2023.02.17 |
| (12) Advanced Technology Systems (0) | 2023.02.17 |