2. 장애물의 회피가 육안으로 유지될 수 있는지, 혹은 departure procedure를 따라야 하는지를 결정한다.
3. 장애물 회피를 위해 ODP(obstacle departure procedure) 및/혹은 DP를 이용할 수 있는지 결정한다. 한 가지 선택지는 VCOA(Visual Climb Over Airport)이다. VCOA를 비행하고자 의도하는 조종사는 출항 이전에 최대한 빨리 ATC에 알려야 한다.
4. IAP가 게재되지 않은 공항에는 departure procedure가 없기 때문에 어떠한 조치가 필요한지를 결정하고 안전한 출항을 보장하는 조치를 취한다.
b. Controller.
1. 교통 관제 서비스가 제공되는 곳의 경우 필요 시 DP(departure procedures)나 DVA(diverse vector areas)와 일치하는 이륙 방향, 선회 방향, 혹은 initial heading을 명시한다.
2. 공항 교통 관제 서비스가 제공되지 않지만 E 등급 공역 내이며 이륙 방향, 선회 방향, 혹은 initial heading을 명시해야하는 경우 절차를 통해 조종사가 장주 패턴, 지형, 그리고 장애물 회피를 준수할 수 있다는 동의를 얻어야 한다.
3. initial heading이 항공기를 절차(예를 들어 departure end of runway에서 waypoint로 향하는 lateral path와 crossing restrictions가 있는 RNAV SID)에서 벗어나게 하는 경우 관제사는 initial heading과 유지해야 할 고도를 함께 할당할 것이다.
4. 분리를 위해 조종사 준수가 필요한 경우 ATC clearance의 일부로 departure procedures가 포함된다.
5. SID와 DVA가 둘 다 있는 경우 ATC는 할당하였던 SID를 취소한 다음 DVA를 사용하기 위해(혹은 DVA를 취소한 다음 SID를 사용하기 위해) amended departure clearance를 제공할 수 있다. 조종사가 충분한 상승 성능이 존재하는지를 확인하여 amended clearance를 수락할 수 있는지를 결정하고 활주로 진입 전에 변경 사항을 브리핑할 수 있을 정도로 시기적절하게 amended clearance를 제공해야 한다.
1. 목적지에 도달하였을 때 지나친 지연을 받아들일 수 없는 연료 상태에 도달한 경우에는 ATC에 minimum fuel을 알린다.
2. 이는 비상 상황이 아니다. 대신 이는 지나친 지연이 생기면 비상 상황이 발생할 수 있음을 나타내는 조언이다.
3. 최초 교신 시 호출 부호를 명시한 후 “minimum fuel”이라는 용어를 사용해야 한다.
EXAMPLE -
Salt Lake Approach, United 621, “minimum fuel.”
4. minimum fuel advisory가 traffic priority의 필요성을 의미하지는 않다는 것을 인지해야 한다.
5. 안전한 착륙을 보장하기 위해 traffic priority가 필요한 경우에는 연료 부족으로 인한 비상 상황을 선언해야 하며 남은 연료를 분 단위로 보고해야 한다.
REFERENCE -
Pilot/Controller Glossary Term – Fuel Remaining.
FUEL REMAINING - 연료가 소진되기까지 남은 연료와 관련하여 조종사나 관제사가 사용하는 문구. 이러한 정보를 전송할 때 조종사는 남은 연료로 비행을 지속할 수 있는 대략적인 시간(분)을 명시한다. 이 대략적인 시간에는 모든 예비 연료가 포함되어야 하며 연료 계기 오류에 대한 허용치도 포함되어야 한다.
b. Controller.
1. 항공기가 minimum fuel 상태를 선언한 경우 이 정보를 관제 관할권이 이전되는 시설에 전달한다.
1. RNAV 절차나 RNP 절차의 조건을 준수할 수 없는 경우 조종사는 최대한 빨리 ATC에 알려야 한다. 예를 들어, “N1234, failure of GPS system, unable RNAV, request amended clearance.”
2. 항공기 항법 데이터베이스에서 RNAV 절차나 RNP 절차의 명칭을 검색할 수 있으며 차트 절차를 준수하지 않는 한 이러한 절차들을 비행할 권한이 없다. 단순히 일련의 waypoints를 직접 입력해서는 안 되며 항공기 항법 데이터베이스에서 명칭으로 절차를 검색할 수 있어야 한다.
3. 가능한 경우 데이터베이스로부터 RNAV route waypoints를 개별적으로 flight plan에 로딩하기 보다는 RNAV routes(Q-route나 T-route) 전부를 로딩 해야 한다. 허나 비행할 published route에 대한 모든 fix들을 입력한다면 각 fix들을 선택 및 입력할 수 있다.
4. 조종사는 데이터베이스의 waypoint 유형을 fly-by에서 fly-over로, 혹은 fly-over에서 fly-by로 변경해서는 안 된다. 데이터베이스 waypoints를 수정하는 것, 혹은 RNAV 절차나 RNP 절차에 user-defined waypoints를 만드는 것은 허용되지 않는다. 단, :
(a) ATC clearance/instruction을 준수하기 위해 waypoint 고도 및/혹은 대기속도 조건을 변경한다.
(b) ATC instruction을 준수하기 위해 published route를 따라 waypoint를 삽입한다. 예를 들어, “Descend via the WILMS arrival except cross 30 north of BRUCE at/or below FL210.” 이는 along-track waypoint가 가능한 시스템으로만 제한된다.
5. FMS를 장비한 항공기의 조종사가 RNAV DP나 STAR procedure를 할당받았다. 이후 runway, transition, 혹은 procedure의 변경을 받았다면 적절한 변경 사항이 로딩 되었는지, 그리고 이를 항법에 이용 가능한지를 확인해야 한다.
6. RNAV 1 DP와 RNAV 1 STAR의 경우 조종사는 CDI, flight director, 및/혹은 autopilot을 lateral navigation mode로 사용해야 한다. 동등한 수준의 성능을 제공하는 다른 방법들도 허용될 수 있다.
7. RNAV 1 DP와 RNAV 1 STAR의 경우 DME/DME/IRU를 사용하는 조종사는 take-off roll 시작 지점에서 항공기 항법 시스템 위치가 1,000ft 이내인지 확인해야 한다. 이 조건을 준수하기 위해 자동으로, 혹은 수동으로 runway update를 하는 것은 허용된다. 동등한 수준의 성능을 제공하는 다른 방법들도 허용될 수 있다.
8. GPS를 사용해야 하는 절차나 경로의 경우 만약 항법 시스템이 GPS의 상실을 승무원에게 자동으로 알리지 않는다면 운영자는 정확한 GPS 작동을 확인하는 절차를 개발해야 한다.
9. ATC가 radar vectors를 발부할 경우, 혹은 waypoint로 직접 향하는 clearances를 발부할 경우 RNAV terminal procedures(DP와STAR)가 수정될 수 있다. 조종사는 절차에 다시 진입하는 것에 대비하여 active “legs” page에서 waypoints를 너무 일찌감치 삭제하지 않도록 해야 한다.
10. RAIM Prediction: RNAV 및 RNP 조건을 충족하기 위해 TSO-C129 장비만이 사용되는 경우 의도하는 비행경로(경로 및 시간)에 대해 GPS RAIM availability를 확인해야 한다. RAIM을 사용할 수 없는 경우 조종사에겐 대체 항법 수단이 필요하다.
REFERENCE -
AIM, Paragraph 5-1-16, RNAV and RNP Operations
11. RNAV 및 RNP 운영에 대한 “established”의 정의. 항공기가 비행 중인 구간에 필요한 정확도 이내이면 RNAV 및 RNP 운영 도중 언제든 established on-course로 간주한다. 예를 들어 Q-Route(RNAV 2)를 운영하는 동안 항공기가 경로 중심선으로부터 2NM 이내에 있을 경우 established on-course로 간주한다.
NOTE-
1. 조종사는 AFM limitations에 따라 항법 시스템이 어떻게 작동하는지를 알고 있어야 한다. 그리고 항공기의 lateral deviation display(혹은 대체 수단으로 map display가 사용되는 경우엔 map display)가 비행 중인 구간의 정확도에 적합한지 확인해야 한다. 일부 운영의 경우 automatic scaling and alerting changes가 적절하다. 예를 들어, TSO-C129 시스템은 접근 운영을 돕기 위해 목적지로부터 30마일 이내일 때, 그리고 FAF로부터 2마일 이내일 때 변경된다. 일부 항법 시스템과 항법 운영의 경우 축적을 수동으로 선택해야 할 수도 있다.
2. Baro-VNAV(barometric vertical navigation)를 갖춘 FMS가 탑재된 항공기의 조종사는 다음 구간으로 FMS leg transition이 이루어진 후 항공기가 established on-course 되었을 때 하강할 수 있다. leg transition은 보통 fly-by waypoint에 대한 선회 이등분선에서 발생한다(waypoint에 대한 자세한 내용은 paragraph 1-2-1 참조). full automation을 사용하는 경우 조종사는 항공기가 적절한 lead times에 선회를 하는지, 그리고 established on-course 된 후 하강을 수행하는지를 확인하기 위해 항공기를 모니터링 해야 한다.
3. full automation이 없는 TSO-C129 항법 시스템을 갖춘 항공기의 조종사는 선회를 시작하기 위해 lead points를 사용해야 한다. 접근의 다음 구간에 established on-course 되었을 때 조종사는 하강할 수 있다.
이 장은 energy-centered approach를 사용하여 항공기의 고도와 대기속도를 관리하는 방법을 설명한다. 에너지 관리는 다음과 같은 목적을 위해 항공기의 에너지 상태와 관련하여 altitude target과 airspeed target을 계획, 모니터링, 그리고 제어하는 절차로 정의될 수 있다:
항공기의 에너지를 고도와 대기속도로 관리하는 법을 배우는 것은 모든 조종사들에게 중요하다. 원하는 수직 비행경로 및 대기속도 프로파일(예를 들어 정속 상승)을 효율적으로 달성 및 유지하기 위해, 그리고 하나의 프로파일에서 다른 프로파일로 전환하기 위해선(예를 들어 하강으로부터 level off) 에너지 관리가 필수적이다.
올바른 에너지 관리는 비행 안전을 위해서도 매우 중요하다. 항공기의 에너지 상태를 잘못 관리하는 것은 치명적일 수 있다. 기계적 에너지(고도 및/혹은 대기속도)의 잘못된 관리는 세 가지 유형의 치명적 사고에 기여한다: LOC-I(loss of control in-flight), CFIT(controlled flight into terrain), approach-and-landing accidents. 따라서 조종사들은 다음을 갖추어야 한다.
1. 비행기를 에너지 시스템으로 생각하는 mental model.
2. altitude target과 airspeed target을 달성 및 유지하기 위해 조종간 입력을 효과적으로 조정할 수 있는 능력.
비행기의 총 기계적 에너지는 고도에서의 위치 에너지, 그리고 대기속도에서의 운동에너지를 합한 것이다. 위치 에너지는 mgh로, 그리고 운동 에너지는 1/2mv²로 표현된다. 따라서 항공기의 총 기계적 에너지는 다음과 같이 나타낼 수 있다:
mgh + 1/2mv²
m = 질량(mass)
g = 중력 상수(gravitational constant)
h = 고도(height)
v = 속도(velocity)
비행 중인 비행기는 “개방된” 에너지 시스템이다. 즉, 비행기는 어떤 원천(예를 들어 연료 탱크)으로부터는 에너지를 얻을 수 있으며 환경(예를 들어 주변 공기)으로부터 에너지를 잃을 수 있다. 또한 이는 고도와 대기속도로 저장된 항공기의 총 기계적 에너지에 에너지가 더해지거나, 혹은 감해질 수 있음을 의미한다.
A Frame of Reference for Managing Energy State
항공기의 에너지 상태는 항상 고도와 대기속도로 저장된 에너지의 총량, 그리고 이러한 에너지의 분포에 의해 결정된다. 항공기의 에너지 상태를 관리하기 위한 기준은 비행기가 중심이 된다. 즉, 지시 고도 및 지시 대기속도의 함수이지 지표면으로부터의 고도 및 groundspeed의 함수가 아니다.
고도계에 표시되는 지시 고도, 그리고 이와 연관된 위치 에너지는 고정된 기준점(MSL)로부터의 비행기 고도를 기준으로 한다(지형 고도에 따라 변화하는 AGL을 기준으로 하지 않음). 마찬가지로 속도계에 표시되는 지시 속도, 그리고 이와 연관된 운동 에너지는 공기에 대한 비행기의 속도를 기준으로 한다(풍향 및 풍속에 따라 변화하는 groundspeed를 기준으로 하지 않음).
지시 고도와 지시 속도는 조종사의 조종간 조작을 통해 변화한다는 점을 유념한다. 이러한 직접적 조작은 비행기가 상승/하강, 혹은 가속/감속 할 능력을 결정한다. 이와 반대로 AGL-altitude와 groundspeed는 “외부” 요인에 의해 변화한다(예를 들어 지형 고도와 바람의 변화). 이러한 요인들은 조종사가 바꿀 수 없다. 물론 조종사는 지형이나 바람과 연관된 위험을 최소화하는 방식으로 항공기 에너지를 관리해야 한다. 예를 들어 상승 지형을 마주하였을 때 비행기의 energy gain이 극대화되고 energy lose가 최소화되도록 에너지 상태를 조작 할 수 있다. 안전한 heading 또한 선택지가 될 수 있다.
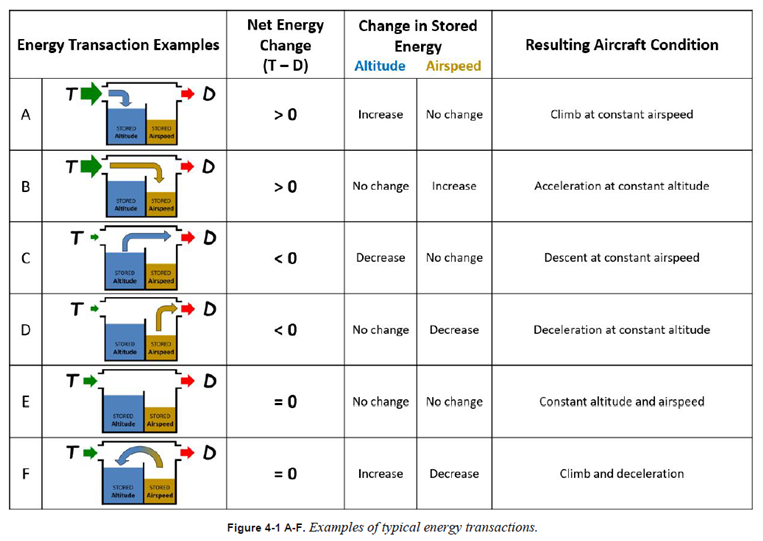
이륙 후 비행기는 엔진 추력(T)으로부터 에너지를 얻고 공기역학적 항력(D)으로부터 에너지를 잃는다. 얻는 에너지와 잃는 에너지 사이의 차이(T-D)가 net change이다. 이는 고도 및 대기속도로 저장된 총 기계적 에너지가 증가, 감소, 혹은 유지되는지를 결정한다.
추력이 항력을 초과하는 경우(T-D > 0) 비행기의 총 기계적 에너지가 증가한다. 이 여분의 에너지를 증가된 고도, 혹은 증가된 대기속도로 저장할 수 있다. 예를 들어 조종사가 여분의 에너지를 고도에 저장하기로 결정하였다면 비행기는 정속으로 상승할 수 있다. [그림 4-1A] 조종사가 여분의 에너지를 대기속도에 저장하기로 결정하였다면 비행기는 고도를 유지하면서 증속할 수 있다. [그림 4-1B]
항력이 추력을 초과하는 경우(T-D < 0) 항공기의 총 기계적 에너지가 감소한다. 조종사는 두 가지 저장 에너지원을 이용할 수 있다. 예를 들어 에너지 부족을 해결하기 위해 저장 에너지가 사용되는 동안 비행기가 정속으로 하강하거나[그림 4-1C], 혹은 고도를 유지하면서 감속할 수 있다[그림 4-1D]. 얻는 에너지와 잃는 에너지가 같으면(T-D = 0) 모든 추력이 항력에 소모된다. 이 경우 총 기계적 에너지, 그리고 고도와 대기속도에 대한 에너지 분포는 변화하지 않는다. 항공기가 일정한 고도 및 대기속도를 유지하므로 stored altitude와 stored airspeed는 일정하게 유지된다. [그림 4-1E]
또한 에너지는 고도와 대기속도 사이에서 교환될 수 있다. 예를 들어 조종사나 대기속도를 고도로 바꾸면 고도가 증가하고 대기속도가 감소한다. 즉, 에너지 교환 시 고도와 대기속도는 항상 반비례한다(단, energy input과 control input이 없는 경우). 하나가 증가하면 다른 하나는 감소한다. 에너지 교환 중 고도와 대기속도에 대한 에너지 분포가 극적으로 변화할 수 있다. 허나 추력이 항력과 일치하도록 조정된다면 이러한 exchange maneuver가 끝났을 때 총 기계적 에너지가 동일하게 유지될 수 있다[그림 4-1F]. 왜냐하면 항력은 속도에 따라 변화하기 때문이다.
Managing Energy is a Balancing Act
비행기는 엔진 추력(T)에서 에너지를 얻고 공기역학적 항력(D)을 통해 에너지를 잃는다. 따라서 비행 중 에너지가 비행기의 안팎으로 계속하여 흐른다. net energy flow는 추력과 항력 사이의 함수이다. 이는 일반적으로 Specific Excess Power(PS), 혹은 에너지 변화율로 측정된다.
Ps = (T – D)V/W
T = Thrust(추력)
D = Drag(항력)
V = velocity(속도)
W = aircraft weight(항공기 무게)
더 중요한 것은 net energy flow로 인한 총 에너지의 변화, 그리고 고도 및 대기속도로 저장된 에너지의 변화 사이에 근본적인 관계가 있다는 것이다. 이러한 기본적인 관계는 비행기의 energy balance equation을 통해 정리될 수 있다. [그림 4-2]
energy balance equation의 왼쪽은 비행기의 net energy flow를 나타낸다. 반면 오른쪽은 저장된 에너지의 변화를 반영한다. 따라서 총 에너지 변화는 방정식의 왼쪽에 영향을 미치는 반면 오른쪽은 고도와 대기속도 사이의 에너지 분배 변화를 나타낸다.
추력과 항력의 차이로 인한 총 에너지의 변화(왼쪽 부분)는 항상 고도와 대기속도에 걸쳐 재분배되는 총 에너지의 변화(오른쪽 부분)와 일치한다. 에너지 변화율(specific excess power)은 비행 도중 변화하지만(양수, 음수, 혹은 0으로) 비행기가 가속하든, 감속하든, 상승하든, 하강하든, 일정한 고도 및 속도를 유지하든 상관없이 방정식의 양 쪽은 균형을 이룬다. (Note: 이 방정식은 연료의 점진적 소모로 인한 항공기 무게 감소로 발생하는 총 역학적 에너지의 장기적 변화를 설명하지는 않는다. 항속거리와 항속시간과 같은 장시간 항공기 성능 문제를 다루는 경우에는 무게 감소가 총 에너지에 미치는 영향이 중요하다. 허나 단시간 비행 문제를 고려하는 경우에는 무시할 수 있는 수준이다.)
물론 조종사는 방정식의 왼쪽(총 에너지 변화)을 제어할 뿐만 아니라 방정식의 오른쪽(고도와 대기속도에 대한 에너지 변화의 분배)도 제어할 있다. 원하는 altitude target과 airspeed target을 달성 및 유지하기 위한, 그리고 에너지 “위기”를 방지하기 위한 throttle/elevator 조정 방법은 에너지 관리의 핵심이다. 이는 이 장의 나머지 부분에서 자세히 설명된다.
energy-centered approach는 throttle/elevator가 총 기계적 에너지에 어떻게 영향을 미치는지를 모델링함으로서 단순한 “pitch for airspeed and power for altitude”를 넘어 엔진과 조종간의 역할을 명확히 한다. 에너지의 관점에서 수직 비행경로와 대기속도를 제어하는 문제는 비행기의 에너지 상태(총 에너지의 양, 그리고 고도와 대기속도에 대한 에너지 분배) 중 하나를 다루는 것이다. 따라서 조종사는 무엇이 고도를 제어하고 무엇이 대기속도를 제어하는지 보다는 무엇이 총 에너지를 제어하는지, 그리고 무엇이 고도 및 대기속도에 대한 분포를 제어하는지를 알아야 한다.
Primary Energy Role of the Throttle and Elevator
throttle은 항력에 대해 엔진 추력을 증가시키거나 감소시킴으로서 총 기계적 에너지를 조절한다. 총 에너지의 변화는 추력과 항력의 함수이다(T-D). 그러나 항력은 주로 대기속도의 변화로 인해 긴 시간에 걸쳐 변화되거나, 혹은 항력만 증가시킬 수 있는 high lift/drag devices에 의해 변화된다. 따라서 총 에너지의 변화는 일반적으로 항력이 아닌 추력의 변화에 의해 시작된다. 추력이 항력보다 커지도록 throttle이 설정되면 총 기계적 에너지가 증가한다. 추력이 항력보다 작아지도록 throttle이 설정되면 총 기계적 에너지가 감소한다. 원하는 path-speed profile이 설정되었다면 throttle은 수직 비행경로 및 대기속도가 필요로 하는 총 에너지와 일치하도록 엔진 추력을 설정한다. 따라서 throttle은 total energy controller이다.
반면 elevator는 pitch attitude를 조절하여 수직 비행경로와 대기속도간의 총 에너지 변화를 할당하는 에너지 분배 장치이다. 원하는 path-speed profile이 설정되었다면 elevator는 수직 비행경로 및 대기속도에 대해 필요 되는 에너지 분배가 유지되도록 pitch attitude를 설정한다. 따라서 elevator는 energy distribution controller이다.
throttle과 elevator는 에너지 상태 제어 장치이다. 그러나 둘 중 어느 장치도 고도나 대기속도를 개별적으로 제어하지 않는다. 왜냐하면 고도와 대기속도는 비행기의 총 역학적 에너지를 통해 본질적으로 연결되어 있기 때문이다. 때문에 고도와 대기속도를 효과적으로 제어하기 위해선 두 장치를 모두 조정하여 에너지 상태를 관리해야 한다.
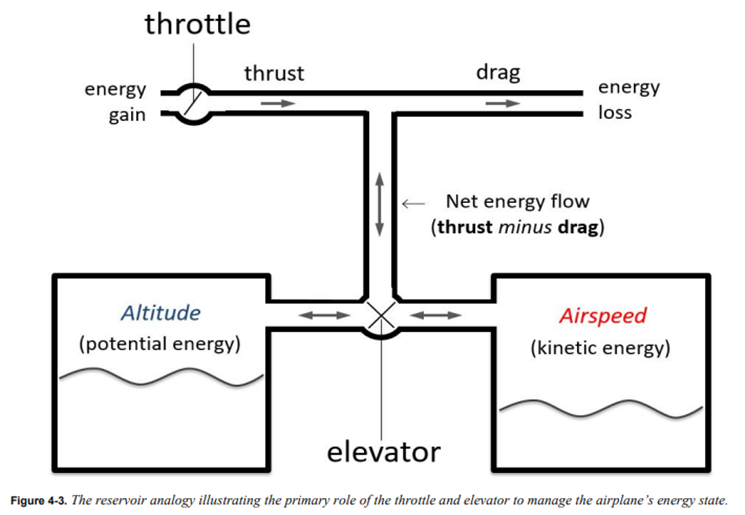
reservoir analogy[그림 4-3]은 에너지에 대한 throttle과 elevator의 역할을 나타낸다. 이 analogy에서 throttle은 net total energy를 조절하는 “valve”를 제어한다. 반면 elevator는 altitude “reservoir”와 airspeed “reservoir”를 오가는 에너지를 분배하는 “valve”를 제어한다. [그림 4-2]의 energy balance equation을 보면 throttle이 방정식의 왼쪽을 제어하는, 그리고 elevator가 방정식의 오른쪽을 제어하는 것이 명확해진다.
throttle이 항력 이상으로 추력을 증가시키면(T-D > 0) 비행기는 총 에너지를 얻는다. throttle이 항력 이하로 추력을 감소시키면(T-D < 0) 비행기는 총 에너지를 잃는다. elevator는 이러한 총 에너지의 증감을 고도와 대기속도 간에 분배한다. throttle이 항력과 추력이 동일하도록 조정되면(T-D = 0) 총 에너지의 변화는 없다. 허나 고도와 대기속도로 저장된 에너지는 elevator를 통해 두 개의 reservoirs 사이에서 교환될 수 있으며 총 에너지는 적어도 짧게나마 일정하게 유지된다.
Additional Role for the Elevator
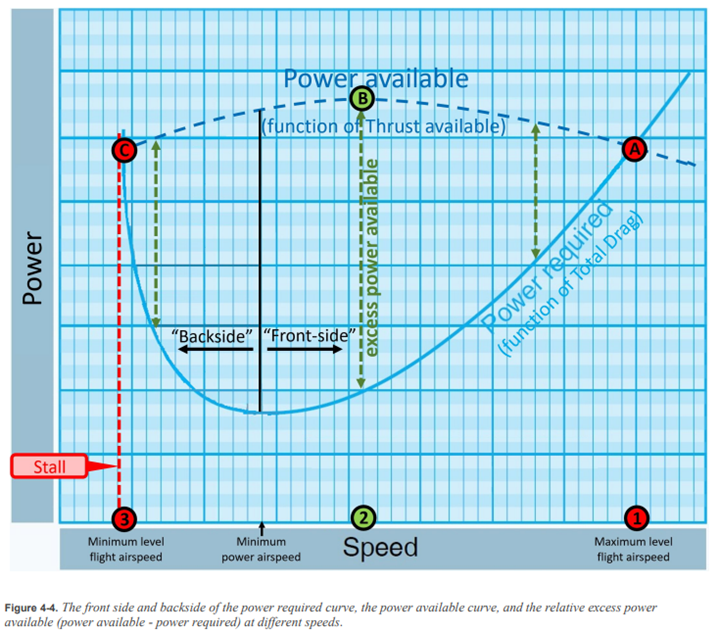
power required curve의 front side(excess power나 excess thrust가 거의 없는 상태에서(그림 4-4의 A) 낮은 받음각으로 고속 순항을 하는 경우(그림 4-4의 1))일 때 조종간을 당길 경우(elevator up) 짧은 에너지 교환이 발생한다. 이는 비행기가 1에서 2로 감속하게 만든다[그림 4-4]. 이러한 대기속도 감소는 총 항력 감소로 이어진다. 따라서 추력이 항력을 초과하는 지점(T-D > 0)에서 positive excess power(Ps > 0)의 형태로 에너지를 사용할 수 있다. 이러한 excess power(그림 4-4의 B)를 통해 비행기는 정속 상승, 혹은 수평 선회(일정한 속도 및 고도를 유지하면서)를 수행할 수 있다.
power required curve의 backside(excess power나 excess thrust가 거의 없는 상태에서(그림 4-4의 C) 높은 받음각으로 저속으로 비행하는 경우(그림 4-4의 3))일 때 조종간을 밀 경우(elevator down) 짧은 에너지 교환이 발생한다. 이는 비행기가 3에서 2로 증속하게 만든다[그림 4-4]. 이러한 대기속도 증가는 총 항력 감소로 이어진다. 따라서 추력이 항력을 초과하는 지점(T-D > 0)에서 positive excess power(Ps > 0)의 형태로 에너지를 사용할 수 있다. 이러한 excess power(그림 4-4의 B)를 통해 비행기는 정속 상승, 혹은 수평 선회(일정한 속도 및 고도를 유지하면서)를 수행할 수 있다. elevator의 이러한 역할은 과도한 감속, 혹은 하강률을 방지하는데 매우 중요하다(Preventing Irreversible Deceleration and/or Sink Rate section 참조).
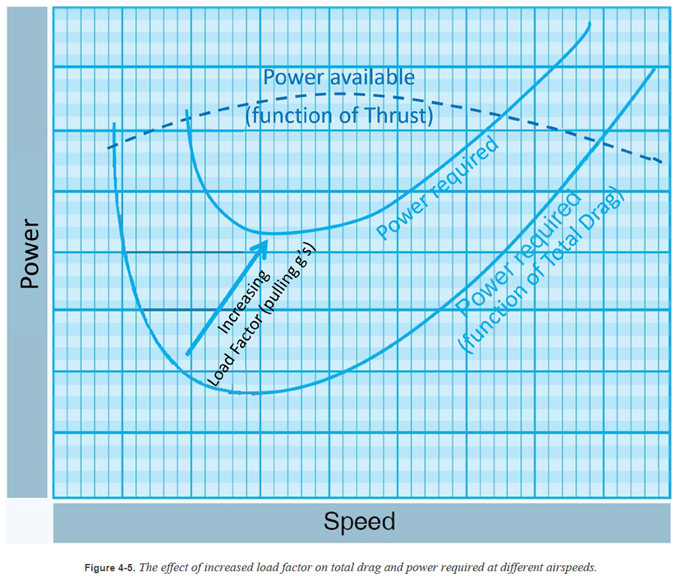
이러한 에너지 교환을 이용한 대기속도 변화를 통해 elevator는 throttle을 보조하여 T-D와 Ps를 변경할 수 있다. 그러나 수평 선회 도중 elevator는 종종 T-D의 “D”를 직접 증가시킬 수 있다. 이는 비행기의 총 에너지가 빠르게 소멸될 수 있도록 만든다. 비행기가 bank 지면 하중 계수(양력/항력)가 증가한다. 왜냐하면 비행기의 무게를 맞춤과 동시에 비행기를 선회로 잡아당기기 위해서는 총 양력이 증가해야하기 때문이다. 이는 받음각을 증가시킴으로써, 즉 조종간을 당김으로써 이루어진다. 허나 이는 유도 항력, 그리고 power required의 증가로 이어진다. 이는 비행기를 빠르게 감속시키며 throttle을 idle로 줄이는 것보다 총 에너지를 더 빠르게 감소시킨다. elevator의 이러한 역할이 그림 4-5에 나타나 있다.
비행기의 에너지 상태를 관리하기 위해 제어 장치들의 각 역할을 적용하는 것은 일련의 간단한 규칙으로 이어진다. 이러한 규칙은 수직 비행경로 및 대기속도를 효과적으로 제어하기 위한 throttle-elevator coordination을 다룬다. 그렇다면 에너지 관리의 기본 규칙은 무엇인가?