Advanced Technologies
Global Navigation Satellite System(GNSS)
GNSS란 시간 및 거리 정보를 고주파 신호로 제공하는 위성군으로 수신기가 이 신호를 수신한다. [그림 9-26] 수신기는 서로 다른 위성들로부터 여러 개의 신호를 수신한 다음 자신의 위치를 삼각측량 할 수 있다.

오늘날 네 개의 GNSS가 존재한다: GPS(미국), GLONASS(러시아), Galileo(유럽), 그리고 Beidou(중국).
Global Positioning System(GPS)
GPS는 위성-기반 무선 항법 시스템으로 이는 수신기가 세계 어느 곳에서나 정확한 위치를 결정할 수 있도록 신호를 방송한다. 수신기는 여러 위성을 추적하여 측량값을 결정한 다음 사용자 위치를 결정한다. [그림 9-27]

미국 국방부(DOD)는 GPS를 우주-기반 위치, 속도, 그리고 시간 시스템으로 개발 및 배치하였다. 미국 국방부는 GPS 위성군의 운영을 담당하며 위성들의 올바른 작동을 보장하기 위해 이들을 지속적으로 모니터링 한다. GPS 시스템은 지구 중심 좌표를 결정할 수 있게 해주며 항공기의 위치를 제공한다. 위성 항법 시스템은 날씨의 영향을 받지 않으며 전 세계적 항법 범위를 제공한다. 이러한 항법 범위는 대양 공역(oceanic airspace) 및 특정 지역에서의 주요 항법 수단으로 사용되기 위한 조건을 완전히 충족한다. GPS 장비는 en route, terminal, 그리고 특정 IAP에서 IFR 항법 보조 수단으로 사용될 수 있다. 항법 수치들(예를 들어 WP까지의 거리/방위와 groundspeed)은 항공기의 현재 위치(위도 및 경도)와 WP의 위치로부터 계산된다. course guidance는 특정 WP들 사이의 대권 경로로부터 linear deviation으로 제공된다.
다른 국가에서는 IFR을 위해 GPS가 승인되지 않을 수 있다. 조종사는 해당 국가에서 GPS가 승인되어 있는지 확인해야 한다.
GPS Components
GPS는 세 가지 elements로 구성된다: space, control, user.
space element는 30개 이상의 Navstar satellites로 구성되어 있다. 이 위성들을 위성군이라 부른다. space element는 6개의 궤도면에 있는 24개의 NAVSTAR(Navigation System using Timing and Ranging) satellites로 구성되어 있다. 완벽한 범위를 위해 각 평면의 위성들은 60도의 간격으로 배치되며 지구로부터 약 11,000마일 상공에 위치한다. 이 평면들은 지구에서 언제든 다섯 개의 위성이 보이도록 배치되어 있다. GPS 위성군은 pseudo-random code timing signal과 data message를 방송하며 항공기 장비는 위성의 위치 및 상태 데이터를 얻기 위해 이 방송을 처리한다. 각 위성의 정확한 위치를 알고 위성의 원자시계와 시간을 정확하게 일치시킴으로써 각 신호가 수신기에 도달하는데 걸리는 시간을 정확하게 측정할 수 있으며 이를 통해 항공기 위치를 결정할 수 있다.
control element는 ground-based GPS monitoring and control stations의 네트워크로 구성되며 이는 위성 위치와 위성 시계의 정확성을 보장한다. 이 네트워크는 현재 다섯 개의 monitoring stations, 세 개의 ground antennas, 그리고 master control station으로 구성되어 있다.
user element는 항공기에 탑재된 수신기/처리 장치로 구성되며 이는 사용자에게 위치, 속도, 그리고 정확한 시간을 제공한다. IFR 하에 사용되는 GPS 장비는 TSO(Techinical Standard Order) C-129에서 명시하는 기준을 충족해야 하고, 감항 조건을 만족해야 하며, 해당 IFR operation의 유형에 대해 “승인”되어야 하고, 해당 POH/AFM이나 flight manual에 따라 작동되어야 한다.
IFR로 비행하고 있다면 해당 운영(예를 들어 en route, terminal, 그리고 instrument approach)을 지원하는 GPS 데이터베이스가 필요하다. GPS 항법 데이터베이스에는 IFR operations에 대해 GPS 항법이 승인된 지역의 WP가 포함되어 있다. 조종사는 데이터베이스에서 원하는 WP를 선택한다. 조종사는 user-defined WP를 추가할 수도 있다.
TSO C-115a에 따라 승인된 장비, VFR(visual flight rules) 시스템, 그리고 휴대용 GPS 시스템은 TSO C-129의 조건을 충족하지 않으며 IFR 항법, 계기 접근, 혹은 주요 계기 비행 수단에 대해 승인되지 않는다. IFR operations 도중 이러한 장치들은 오직 상황 인식을 돕기 위한 보조 장치로 간주될 수 있다.
GPS/WAAS IFR operation 전에 조종사는 적절한 NOTAM과 항공 정보를 검토해야 한다. 이러한 정보는 FSS(flight service station)에서 얻을 수 있다. FAA는 WAAS의 상태와 이용 가능한 서비스 수준을 알리기 위해 NOTAM을 제공한다.
Function of GPS
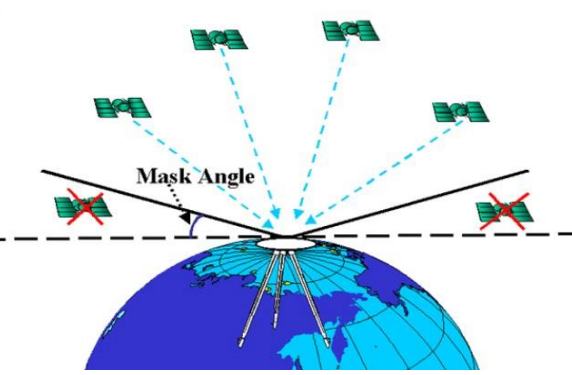
GPS는 위성들로부터의 거리 및 삼각측량 개념을 기초로 한다. 수신기는 mask angle 위에 있는 최소 4개의 위성 데이터를 사용한다.
GPS 수신기는 무선 신호의 이동 시간을 통해 위성으로부터의 거리를 측정한다. 각 위성은 course/acquisition(CA) code라 불리는 특정 코드를 전송하며 여기에는 위성의 위치, GPS 시스템 시간, 그리고 전송된 데이터의 상태 및 정확성에 대한 정보가 포함된다. 신호가 이동하는 속도(대략 초당 186,000마일)와 정확한 방송 시간을 알면 신호 도착 시간을 통해 신호가 이동한 거리를 계산할 수 있다. 이러한 방법을 통해 계산된 거리를 의사거리라 부른다. 왜냐하면 이는 거리를 직접 측정한 것이 아니라 시간을 측정한 것이기 때문이다. 수신기는 위성의 정확한 위치도 알아야 한다. 각 위성은 정확한 궤도상 위치 정보를 전송한다. GPS 수신기는 이 정보를 통해 위성의 정확한 위치를 확립한다.
GPS 수신기/처리 장치는 위성이 제공하는 의사거리와 위치 정보를 통해 삼각측량을 수행해서 위치를 결정한다. GPS 수신기가 3차원 위치(위도, 경도, 그리고 고도)와 시간을 제공하기 위해선 최소 4개의 위성이 필요하다. GPS 수신기는 항공기의 위도/경도와 데이터베이스를 통해 항법 수치들(WP까지의 거리/방위와 groundspeed)을 계산한다.
GPS 수신기는 RAIM(receiver autonomous integrity monitoring)을 통해 GPS 위성군으로부터 수신 받은 신호의 무결성(유용성)을 확인한다. 이는 위성이 오류 정보를 제공하는지 확인하기 위함이다. RAIM이 무결성을 감지하기 위해선 최소 5개의 위성이(혹은 4개의 위성과 barometric altimeter baro-aiding) 필요하다. RAIM이 오류 신호를 분리한 다음 이를 navigation solution에서 제거하기 위해선 6개의 위성이(혹은 5개의 위성과 baro-aiding) 필요하다.
보통 두 가지 유형의 RAIM 메시지가 있다. 하나는 RAIM을 제공하기엔 위성이 충분하지 않다는 것을 나타낸다. 다른 하나는 RAIM이 현재 비행 단계의 제한치가 초과되는 오류 가능성을 감지했다는 것을 나타낸다. RAIM 기능이 없다면 조종사는 GPS 위치의 정확성에 대한 확신을 가지지 못한다.
IFR로 en route, terminal, 그리고 특정 IAP를 비행하기 위해 GPS 항법 장비를 사용하는 경우에는 대체 항법 수단을 갖추어야 한다. 목적지 공항과 교체비행장으로 향하는 경로에 적합한 모든 지상 기반 시설을 수신할 수 있는 항전 장비가 설치되어야 한다. 이러한 경로에 필요한 지상 기반 시설도 모두 운영되어야 한다. GPS 수신기가 무결성 모니터링을 위해 RAIM을 사용하는 경우에는 대체 항법 장비를 모니터링하지 않아도 된다. GPS 수신기의 RAIM 기능이 상실된 경우에는 대체 항법 장비를 적극적으로 모니터링해야 한다. RAIM 기능이 상실될 것으로 예상된다면 대체 항법 장비에 의존하거나, 출항을 지연하거나, 혹은 비행을 취소해야 한다.
GPS Substitution
IFR En Route and Terminal Operations
en route/terminal에서의 운영이 인가된 GPS 시스템으로 다음을 수행하는 경우에는 ADF 수신기와 DME 수신기 대신 GPS를 사용할 수 있다.
1. DME fix 상공에서 항공기 위치를 결정할 때.
2. DME arc를 비행할 때.
3. NDB/compass locator에서 TO/FROM 항행을 수행할 때.
4. NDB/compass locator 상공에서 항공기 위치를 결정할 때.
5. VOR/LOC course와 교차하는 NDB/compass locator bearing으로 구성된 fix 상공에서 항공기 위치를 결정할 때.
6. NDB/compass locator에서 체공할 때.
GPS Substitution for ADF or DME
ADF나 DME 대신 GPS를 사용하는 경우에는 다음과 같은 제한 사항이 적용된다:
1. 해당 장비가 적절한 감항 조건에 따라 설치되어야 하며 POH/AFM의 규정에 따라 작동되어야 한다.
2. 이러한 운영에 필요한 무결성이 적어도 en route RAIM에 의해 제공되어야 한다.
3. 이러한 운영에 사용될 WP, fixes, intersections, 그리고 facility가 GPS 데이터베이스로부터 검색되어야 한다. 데이터베이스는 최신 상태여야 한다. 만약 데이터베이스를 통해 특정 위치를 검색할 수 없다면 ADF 및/혹은 DME 대신 GPS를 사용할 수 없다.
4. RAIM이 중단된 상황을 위한 절차가 수립되어야 한다. 이를 위해서는 비행이 다른 장비에 의존해야 하거나, 혹은 NDB 및/혹은 DME 수신기가 항공기가 장비되어야 함을 요구할 수 있다. 그렇지 않은 경우 비행경로를 변경하거나, 비행을 지연하거나, 비행을 취소하거나, 혹은 VFR 하에 수행되어야 한다.
5. terminal area에서 GPS course guidance를 tracking 하고 있다면 CDI를 terminal sensitivity(1NM)로 설정해야 한다.
6. 교체비행장이 필요한 경우에는 해당 공항에 non-GPS approach가 존재해야 한다. 만약 non-GPS approach가 DME나 ADF를 필요로한다면 항공기에 DME나 ADF가 있어야 한다.
7. 차트에서 요구하는 ADF 및/혹은 DME 조건들이 GPS 시스템을 통해 충족될 수 있어야 한다(단, 주된 계기 접근 항법 장비로 사용되는 경우는 제외).
NOTE: 다음의 지침들은 특정 GPS 시스템을 위한 것이 아니다. 특정 시스템을 위한 지침은 POH/AFM나 supplement를 참조한다.
To Determine Aircraft Position Over a DME Fix:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. 만약 fix가 다섯 글자의 명칭으로 식별되며 그 명칭이 GPS 데이터베이스에 포함되어 있다면 해당 fix를 active GPS WP로 설정하거나, 혹은 DME fix를 설립하는 시설을 active GPS WP로 설정한다. 후자의 경우 DME fix가 설립되는데 사용된 DME facility만 이용할 수 있다. 만약 해당 시설이 데이터베이스에 없다면 이 운영을 수행할 수 없다.
3. 만약 fix가 다섯 글자의 명칭으로 식별되는데 그 명칭이 GPS 데이터베이스에 포함되어있지 않다면, 혹은 fix에 명칭이 없다면 DME fix를 설립하는 시설을 active GPS WP로 설정한다.
4. fix를 active GPS WP로 선택하였다면 GPS 시스템이 active WP를 나타낼 때 fix 상공인 것이다.
5. DME facility를 active GPS WP로 선택하였다면 active WP로부터의 GPS 거리가 차트의 DME와 동일하며 항공기가 적절한 bearing(혹은 course)에 설정되었을 때 fix 상공인 것이다.
To Fly a DME Arc:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. 데이터베이스에서 DME arc를 제공하는 시설을 active GPS WP로 설정한다. DME arc의 기초가 되는 DME facility만 이용할 수 있다. 만약 해당 시설이 데이터베이스에 없다면 이 운영을 수행할 수 없다.
3. DME 값 대신 GPS 거리를 참조하여 arc를 유지한다.
To Navigate TO or FROM and NDB/compass Locator:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. 데이터베이스에서 NDB/compass locator 시설을 active GPS WP로 설정한다. 만약 차트에 compass locator와 병치된 동일한 명칭의 fix가 있다면 compass locator 시설 대신 이 fix를 active WP로 사용할 수 있다.
3. active WP로부터 TO/FROM 하는 course를 설정 및 비행한다.
To Determine Aircraft Position Over and NDB/Compass Locator:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. 데이터베이스에서 NDB/compass locator 시설을 active GPS WP로 설정한다. 해당 시설이 차트와 데이터베이스에 모두 있어야 한다. 만약 시설이 데이터베이스에 없다면 이 운영을 수행할 수 없다.
3. GPS 시스템이 active WP에 도달하였음을 나타낼 때 NDB/compass locator 상공인 것이다.
To Determine Aircraft Position Over a Fix Made up of an NDB/Compass Locator Bearing Crossing a VOR/LOC Course:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. crossing NDB/compass locator bearing으로 이루어진 fix는 다섯 글자의 명칭으로 식별된다. 조종사는 해당 fix를, 혹은 NDB/compass locator 시설을 active GPS WP로 설정할 수 있다. 해당 시설이 차트와 데이터베이스에 모두 있어야 한다. 만약 시설이 데이터베이스에 없다면 이 운영을 수행할 수 없다.
3. fix를 active GPS WP로 선택하였다면 GPS 시스템이 WP에 도달하였다 지시할 때 fix 상공인 것이다.
4. NDB/compass locator 시설을 active GPS WP로 선택하였다면 VOR/LOC course 비행 도중 active WP로 향하는 GPS bearing이 차트의 NDB/compass locator bearing과 같아졌을 때 fix 상공인 것이다.
To Hold Over an NDB/Compass Locator:
1. GPS 시스템의 무결성 모니터링이 제대로 작동하고 있으며 충분한 무결성을 표시하는지 확인한다.
2. 데이터베이스에서 NDB/compass locator 시설을 active GPS WP로 선택한다. 해당 시설이 차트와 데이터베이스에 모두 있어야 한다. 만약 시설이 데이터베이스에 없다면 이 운영을 수행할 수 없다.
3. POH/AFM나 supplement에 따라 nonsequencing mode(예: “HOLD” 혹은 “OBS”)를 선택하고 적절한 course를 선택한다.
4. POH/AFM나 supplement에 따라 GPS 시스템으로 체공을 수행한다.
IFR Flight Using GPS
비행 전 준비 도중 GPS가 운항 유형에 맞는 최신 데이터베이스로 설치되어 있는지 확인해야 한다. GPS 작동 방법은 POH/AFM이나 flight manual supplement에 따라 수행되어야 한다. 조종사는 항공기의 특정 GPS 장비, 수신기 조작 매뉴얼, 그리고 POH/AFM나 flight manual supplement를 철저히 숙지해야 한다. ILS/VOR과는 달리 GPS는 기본 작동 방법, 수신기 표시 방법, 그리고 몇몇 기능이 장비마다 다를 수 있다. 때문에 특정 수신기의 작동 방법에 대한 철저한 연구 없이 다른 브랜드의(혹은 심지어 동일한 브랜드의) GPS를 사용하지 않는다. IFR에서 GPS를 사용하기 전에 VFR에서 이를 사용하면 장비에 더욱 익숙해질 수 있다.
GPS를 항법 보조 수단으로 사용하는 경우에는 IFR 비행과 관련된 NOTAM을 확인해야 한다. GPS 위성 정지에 대한 GPS NOTAM이 국내외적으로 발부된다. 비행 전 브리핑 도중 FSS에 GPS 항공 정보를 요청하면 공항에 대한 GPS RAIM availability 정보를 얻을 수 있다. GPS RAIM 항공 정보는 3시간 주기로(예를 들어 1215시에 도착 예정인 경우 1100~1400시), 혹은 24시간 주기로 제공될 수 있다. FAA briefers는 ETA ±1시간의 RAIM 정보를 제공한다(단, 조종사가 특정 시간대를 요청한 경우 제외). GPS departure를 비행하는 경우에는 출항 공항에 대한 RAIM prediction도 요청해야 한다. 일부 GPS 수신기는 RAIM availability를 예측하는 기능이 있다. 또한 조종사는 비행경로, 터미널 운영, 목적지에서의 계기 접근, 그리고 교체비행장에 필요한 지상-기반 항법 시설 및 관련 항공기 장비가 ETA까지 작동하는지 확인해야 한다. 만약 지상-기반 항법 시설 및 관련 항공기 장비를 이용할 수 없다면 비행경로를 변경하거나, 일정을 변경하거나, 비행을 취소하거나, 혹은 VFR로 비행을 수행해야 한다.
GPS 수신기로부터 정보를 프로그래밍 및 검색하는 것을 빼고는 비행 계획이 종래의 NAVAID와 유사한 방식으로 이루어진다. 제조업체의 지침에 따라 departure WP, DP, route, STAR, desired approach, IAF, 그리고 destination airport를 GPS 수신기에 입력한다. 비행 전 점검 도중 추가 정보를 입력할 수 있다(예를 들어 ETA, 연료 계획, 상공 바람, 등등).
GPS 수신기가 켜지면 테스트 및 초기화가 시작된다. 수신기가 초기화되면 사용자는 WP를 선택하여 경로를 만들고 데이터를 확인한 후 active flight plan을 선택한다. 이 절차는 제조업체마다 크게 다르다. GPS는 복잡한 시스템이며 수신기들간의 표준화가 거의 이루어지지 않는다. 항공기에 탑재된 장비의 작동 방법을 숙지하는 것은 조종사의 책임이다.
GPS 수신기는 항법 수치들(예를 들어 track, bearing, groundspeed, 그리고 distance)을 제공한다. 이러한 수치들은 항공기의 현재 위도/경도에서 다음 WP까지 계산된다. WP들 사이에서 course guidance가 제공된다. 조종사는 지상에서의 항공기 실제 track을 알 수 있다는 장점을 가진다. WP로 향하는 track과 bearing이 일치한다면 항공기가 WP로 곧장 향한다.
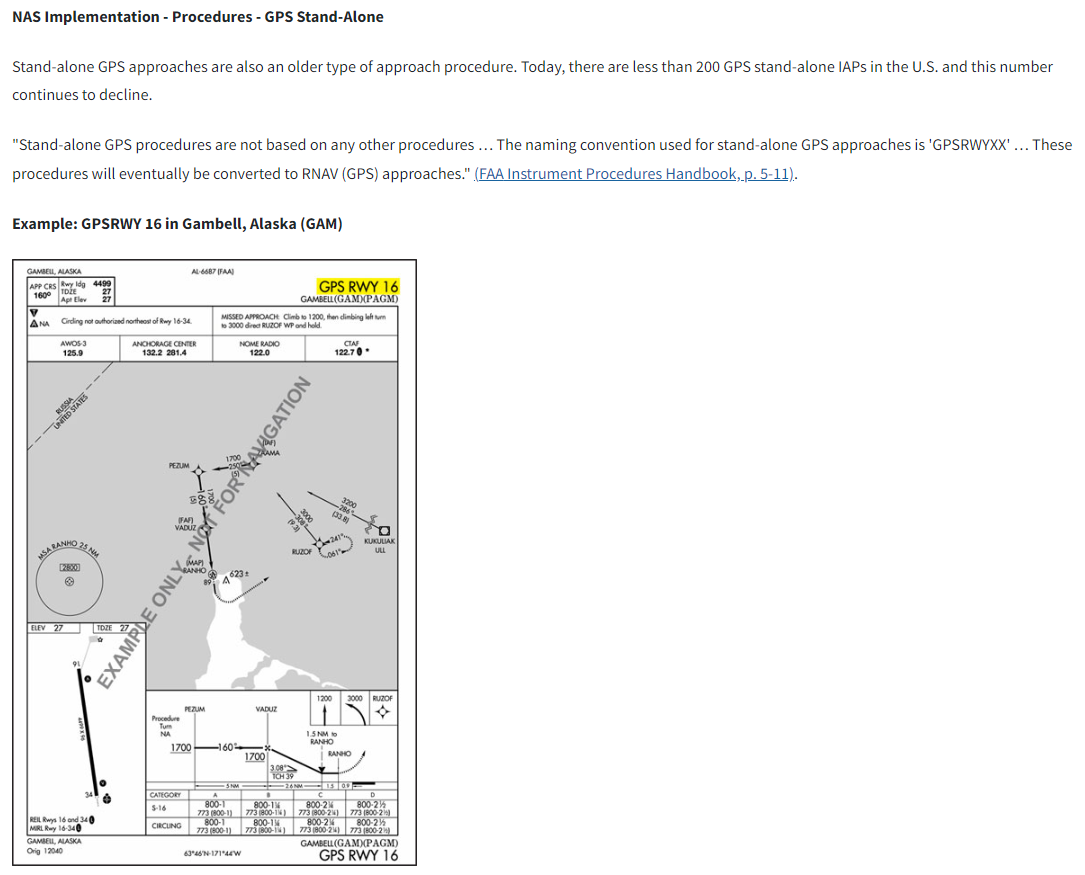
GPS Instrument Approaches
미국에는 GPS overlay approaches(접근 명칭에 “or GPS"가 있는 접근)와 GPS stand-alone approaches가 있다.
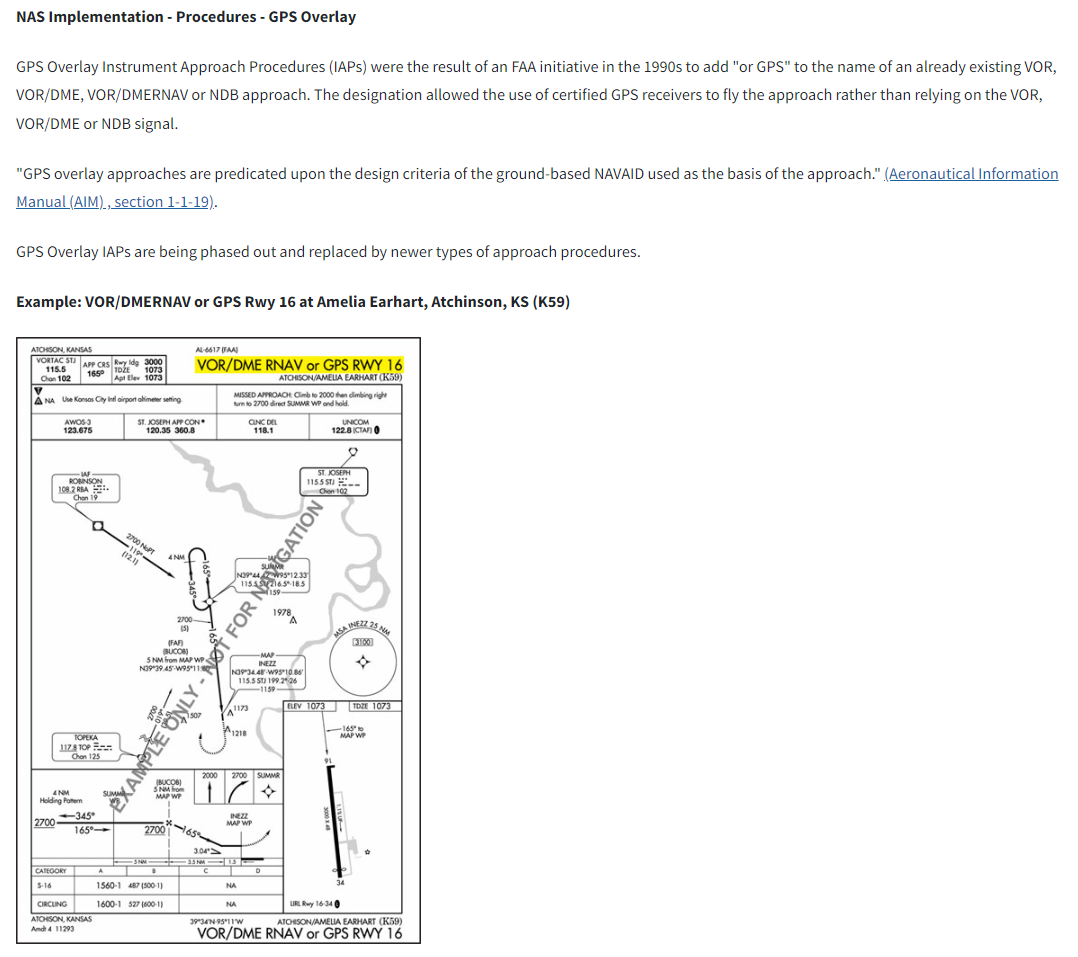
NOTE: 미국 이외의 지역에서 GPS 계기 접근을 수행하는 경우에는 해당 국가의 승인을 받아야 한다.
이러한 IAP를 수행하는 동안 ground-based NAVAIDs가 작동하지 않아도 되며 이와 관련된 항전 장비가 설치, 작동, 혹은 모니터링되지 않아도 된다. 허나 가능하다면 예비 항법 시스템을 항상 모니터링 하는 것이 권장된다.
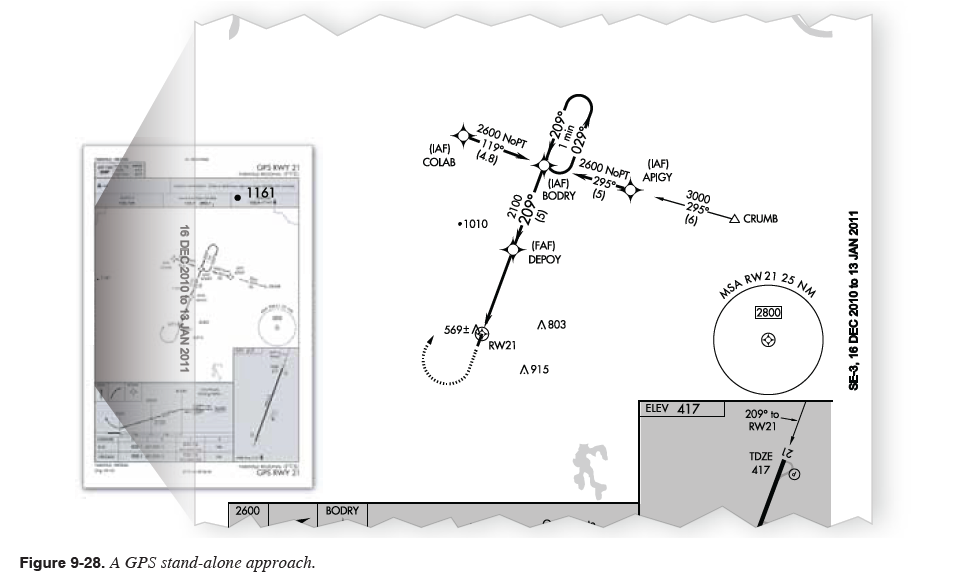
조종사는 GPS 접근 절차에 대한 기본적인 이해가 있어야 하며 IMC(instrument meteorological conditions)에서 GPS IAP를 수행하기 전에 VMC(visual meteorological conditions)에서 이를 연습해야 한다. [그림 9-28]
제조업체나 그 외 FAA-approved source에서 제공하는 최신 GPS 데이터베이스를 통해 모든 IAP를 검색할 수 있어야 한다. 접근을 point to point로 비행하면 접근 절차가 준수되지 않는다. 이 경우 적절한 RAIM sensitivity를 이용할 수 없으며 CDI sensitivity가 자동으로 0.3NM로 변경되지 않는다. 일부 수신기에서는 CDI sensitivitiy를 직접 설정하여도 RAIM sensitivity가 자동으로 변경되지 않는다. 기존의 비정밀 접근 절차들 중 일부는 GPS와 함께 사용될 수 없으며 overlay approaches로 사용될 수 없다.
GPS approach는 GPS 명칭(예를 들어 “GPS RWY 24” 혹은 “RNAV RWY 35”)을 통해 요청 및 승인된다. GPS 수신기 데이터베이스를 통해 원하는 접근과 적절한 IAF를 선택한다. 조종사는 IAWP(initial approach waypoint)나 feeder fix로부터 full approach를 비행해야 한다(단, 달리 승인받은 경우 제외). intermediate fix에서 무작위로 접근에 진입하면 지형 회피가 보장되지 않는다.
접근이 flight plan에 로딩 되면 GPS 수신기는 airport reference point로부터 30NM 직선거리에서 “arm” annunciation을 표시한다. 30NM 거리 내에 있을 때 approach mode가 “armed” 되어 있어야 수신기가 en route CDI(±5NM)와 RAIM(±2NM) sensitivity를 terminal(±1NM) sensitivity로 변경한다. IAWP가 30NM 이내에 있는 경우에는 approach mode가 armed 되었을 때 CDI sensitivity가 바뀐다. IAWP가 30NM 바깥에 있는 경우에는 approach mode가 armed 되었다 하더라도 항공기가 30NM 이내로 들어오기 전까지는 CDI sensitivity가 바뀌지 않는다. feeder route obstacle clearance는 다음을 전제로 한다: airport reference point로부터 30NM 이내에서 수신기의 CDI와 RAIM은 terminal CDI sensitivity로 설정되어 있음. 따라서 30NM annunciation이 표시되기 전에 수신기를 arm 해야 한다.
조종사는 holding patterns을 수행할 때, 그리고 overlay approaches에서 procedure turn같은 기동을 수행할 때 GPS 수신기의 정확한 작동 방법에 특히 주의해야 한다. 이러한 절차들은 조종사의 개입을 필요로 할 수 있다. 조종사는 수신기의 WP sequencing을 중단한 다음 기동이 완료되었을 때 automatic GPS navigation sequencing을 재개해야 한다. 동일한 WP가 비행경로에 한 번 이상 순차적으로 나타날 수도 있다. 조종사는 현재 비행 중인 구간에 적합한 WP로 수신기가 sequence 될 수 있도록 주의를 기울여야 한다(특히 하나 이상의 fly-over WP를 건너뛰는 경우). 적절한 위치에서 GPS automatic sequencing을 시작하기 위해 조종사가 하나 이상의 fly-over WP를 건너뛰어야 할 수도 있다.
vectors to final을 수행하는 경우에는 보통 FAWP에서 수신기를 nonsequencing mode로 설정하고 조종사가 직접 course를 설정한다. 이렇게 하면 활주로와 정렬된 기존 구간의 바깥에서 final approach course로 vector를 받을 때 final approach course의 연장선이 제공된다. 차트에 게재된 접근 구간에 설정되기 전까지는 ATC로부터 할당받은 고도를 유지해야 한다. 조종사는 FAWP 바깥에 놓인 WP의 고도나 step-down fixes의 고도를 고려해야 한다. 적절한 위치에서 하강을 시작하기 위해 FAWP까지의 거리를 계산해야 할 수도 있다.
approach mode가 armed 된 상태에서 FAWP로부터 2NM 이내로 진입하면 approach mode가 활성화되며 이로 인해 RAIM과 CDI의 sensitivity가 approach mode로 변경된다. FAWP로부터 2NM 지점부터 full scale CDI sensitivity가 ±1NM에서 ±0.3NM로 점점 변화한다. 만약 sensitivity가 ±1NM에서 ±0.3NM로 변화하고 있을 때 CDI가 중앙에 있지 않았다면 sensitivity의 변화로 인해 CDI의 편차가 커진다. 이로 인해 적절한 intercept heading을 유지하고 있음에도 불구하고 항공기가 특정 경로로부터 멀어지고 있다는 느낌을 받을 수 있다. 만약 approach mode에서 cross-track error를 사용할 수 있다면 해당 기능이 이러한 상황에서 도움이 될 수 있다. sensitivity가 변경되기 전에 이미 final approach course에 설정되어 있었다면 CDI 화면을 해석하는데 문제가 발생하지 않는다. FAWP로부터 2NM 이내에서 final approach course를 교차하는 vectors를 요청하거나 수락하는 것은 권장되지 않는다.
GPS 수신기를 올바르게 조작하는 것은 접근 도중 특히나 중요하다. 경우에 따라 잘못된 조작으로 인해 수신기가 approach mode로부터 벗어날 수 있다. 접근 도중 시스템에 의해 자동으로 선택된 감도를 조작하면 approach mode annunciation이 취소된다. FAWP로부터 2NM 지점에 도달하기 전에 approach mode를 armed 하지 않으면 approach mode가 활성화 되지 않으며 장비에 flag가 표시된다. 이러한 상황에서는 RAIM과 CDI의 sensitivity가 줄어들지 않으며 조종사는 MAWP로 비행한 다음 실패 접근을 수행해야 한다. FAWP에 도달하기 전에 approach mode가 활성화 되었는지 확인하기 위해 approach active annunciator 및/혹은 receiver를 점검해야 한다.
GPS missed approach 도중 조종사는 수신기가 MAWP 후에 실패 접근 구간으로 sequence를 수행하도록 조작해야 한다. 조종사는 항공기에 설치된 GPS 수신기의 활성화 절차를 철저히 숙지해야 하며 MAWP 후에 적절한 조치를 취해야 한다. MAWP 전에 실패 접근을 활성화하면 CDI sensitivity가 즉시 terminal(±1NM) sensitivity로 변경되며 수신기는 계속하여 MAWP로 향한다. MAWP 이후에는 수신기가 WP sequencing을 수행하지 않는다. MAWP 전에 선회를 시작해서는 안 된다. 만약 실패 접근이 활성화되지 않았다면 GPS 수신기는 inbound final approach course의 연장선과 MAWP로부터의 ATD(along track distance)를 표시한다.
실패 접근 구간의 첫 번째 경로가 다음 WP로 향하는 것이 아니라 course를 비행하는 것이라면 조종사가 직접 course를 설정해야 한다. 이 비행 구간에 필요한 모든 정보들을 숙지하는 것은 특히나 중요하다.
Departures and Instrument Departure Procedures(DPs)
IFR charted departures와 DP를 수행하기 위해선 GPS 수신기가 terminal(±1NM) CDI sensitivity로 설정되어야 하며 데이터베이스에 포함된 항법 경로로 설정되어야 한다. Terminal RAIM은 수신기에 의해 자동으로 제공되어야 한다. (WP들이 active flight plan의 일부가 아니며 첫 번째 목적지로 직접 향하는 경우에는 terminal RAIM이 제공되지 않을 수도 있다.) DP의 특정 구간에서는 조종사의 개입이 필요할 수 있다(특히 course를 향해 radar vector를 받는 경우, 혹은 WP로 향하는 특정 course를 교차해야 하는 경우). 데이터베이스에 모든 활주로에 대한 transitions나 departures가 없을 수도 있으며 일부 GPS 수신기는 데이터베이스에 DP를 포함하지 않는다.
GPS Errors
30개의 위성이 작동 중이면 보통 GPS 위성군을 전 세계적으로 이용할 수 있다. 24개 미만의 위성이 작동 중인 경우에는 특정 위치에서 GPS 항법 기능을 사용하지 못할 수도 있다. 높은 지형으로 둘러싸인 계곡에서도, 그리고 항공기의 GPS 안테나가 항공기 구조에 의해 가려질 때에도 신호가 손실될 수 있다.
특정 수신기, 송수신기, 휴대용 라디오, 그리고 휴대용 수신기는 신호 간섭을 일으킬 수 있다. 일부 VHF transmissions는 “harmonic interference”를 유발할 수 있다. 조종사는 수신기의 신호 품질 데이터 페이지를 모니터링 하면서 휴대용 수신기의 위치를 바꿔보거나, 주파수를 변경하거나, 혹은 간섭을 일으키는 것으로 예상되는 장치를 꺼서 harmonic interference를 차단할 수 있다.
GPS 위치 정보는 장비 특성과 다양한 기하학적 요인들로부터 영향을 받을 수 있으며 이로 인해 보통 100ft 미만의 오류가 발생한다. 위성 원자 시계의 부정확성, 수신기/처리 장치, 단단한 물체로부터 반사된 신호(multi-path), 전리층 지연과 대류권 지연, 그리고 위성 데이터 전송 오류로 인해 미세한 위치 오차나 순간적 신호 손실이 발생할 수 있다.
System Status
GPS 위성이 전송하는 데이터 메시지에는 위성의 상태가 포함된다. GPS 위성의 상태는 NOTAM 시스템을 통해 확인할 수 있다.
GPS 수신기는 위성이 오류 정보를 제공하는지 확인하기 위해 RAIM을 통해 GPS 위성군에서 수신한 신호의 무결성(유용성)을 확인한다. 수신기가 RAIM 기능을 수행하기 위해선 항법에 필요한 위성 외에 최소 1개의 위성이 있어야 한다. 따라서 RAIM이 무결성을 탐지하기 위해선 최소 5개의 위성(혹은 4개의 위성과 barometric altimeter [baro-aiding])이 필요하다. RAIM이 오류 신호를 분리한 다음 이를 navigation solution에서 제거하기 위해선 6개의 위성(혹은 5개의 위성과 baro-aiding)이 필요하다.
RAIM이 제공하는 메시지는 수신기마다 다소 다르지만 보통 두 가지 유형이 사용된다. 하나는 RAIM이 무결성 모니터링을 제공하기엔 위성이 충분하지 않음을 나타낸다. 다른 하나는 RAIM이 현재 비행 구간의 제한치가 초과되는 오류 가능성을 감지하였음을 나타낸다. RAIM 기능이 없다면 조종사는 GPS 위치의 정확성을 신뢰할 수 없다.
Selective Availability. 이는 GPS의 정확도를 의도적으로 저하시키는 방법이다. 이 기능은 GPS 위치 정보가 적대적으로 사용되는 것을 막기 위해 설계되었다. selective availability는 2000년 5월 1일에 중단되었다. 허나 많은 GPS 수신기들이 selective availability가 여전히 활성화되어있다 가정하고 설계되었다. 새로운 수신기들은 ICAO Annex 10의 성능 값들을 근거로 selective availability가 중단된 사실을 이용할 수 있으며 해당 성능을 벗어나도록 설계되지 않아도 된다.
GPS familiarization
조종사는 IMC에서 GPS approach를 수행하기 전에 VMC에서 이를 연습하여 장비의 모든 요소들을 완전히 숙달해야 한다. 조종사가 연습해야 할 과제들 중 일부는 다음과 같다:
1. RAIM prediction 기능을 활용하는 것.
2. flight plan에 DP를 기입하는 것(필요한 경우 terminal CDI sensitivity를 설정하는 것 포함). 그리고 출항을 위해 terminal RAIM을 사용할 수 있는지 확인하는 것(일부 수신기는 DP나 STAR를 지원하지 않음).
3. 목적지 공항을 프로그래밍하는 것.
4. overlay approaches를 프로그래밍 및 비행하는 것(특히 procedure turns와 arcs).
5. 접근을 선택한 후 다른 접근으로 변경하는 것.
6. “direct” missed approaches를 프로그래밍 및 비행하는 것.
7. “routed” missed approaches를 프로그래밍 및 비행하는 것.
8. holding pattern을 진입, 비행, 그리고 이탈하는 것(특히 holding pattern 내에 두 번째 WP가 있는 overlay approaches를 비행하는 경우).
9. holding pattern에서 “route”를 프로그래밍 및 비행하는 것.
10. radar vector를 통해 intermediate segment로 향하는 접근을 프로그래밍 및 비행하는 것.
11. FAWP 이전/이후에 RAIM 기능이 상실되었을 때 필요한 조치.
12. VOR로부터의 radial/distance를 프로그래밍하는 것(이는 종종 departure instructions에서 사용됨).
Differential Global Positioning Systems(DGPS)
GNSS의 정확도를 향상시키기 위해 DGPS가 설계되었다. DGPS는 변수들의 변화를 측정한 다음 위성 위치 보정 값을 제공한다.
동일한 위성을 수신하는 수신기들에서는 유사한 오차가 발생하므로 reference receiver는 자신의 이론적 위치를 정확하게 계산한 다음 해당 값을 항법 위성 신호들의 측정값과 비교할 수 있다. 두 값간의 차이가 바로 오차이며 이는 reference signal correction을 제공함으로써 수정될 수 있다.
위성 항법 보정 시스템을 통해 위성 시스템의 정확도가 1m까지 높아질 수 있다. WAAS(Wide Area Augmentation System)와 Ground Based Augmentation System(GBAS)는 DGPS의 예이다.
Wide Area Augmentation System(WAAS)
WAAS는 GPS 신호의 정확성, 무결성, 그리고 가용성을 향상시키기 위해 설계되었다. WAAS를 사용하면 이륙부터 접근까지 GPS를 항법 시스템으로 사용할 수 있다. ICAO는 SBAS(WAAS, EGNOS, 그리고 MSAS)에 대한 SARPs(Standards and Recommended Practices)를 규정하였다. 인도와 유럽에서도 이와 유사한 시스템을 구축하고 있다(EGNOS와 GAGAN). 이 덕분에 GPS와 유사한, 허나 더 큰 정확성 · 무결성 · 가용성을 갖춘 전 세계적 항법 기능이 제공된다.
WAAS는 wide-area ground reference stations가 WAAS 네트워크에 연결되어 종래의 지상-기반 항법 보조 장비보다 넓은 서비스 범위를 다룬다. 위성 시계 보정과 에페메리스(ephemeris) 보정을 결정하기 위해 GPS 위성의 신호들은 이러한 기지국들에 의해 모니터링 된다. 각 기지국은 wide-area master station으로 데이터를 전달하며 여기서 보정 정보가 계산된다. 보정 메시지는 ground uplink를 통해 GEO(geostationary satellite)에 업링크된 다음 GPS와 동일한 주파수를 통해 방송 범위 내 WAAS 수신기에 방송된다. [그림 9-29]
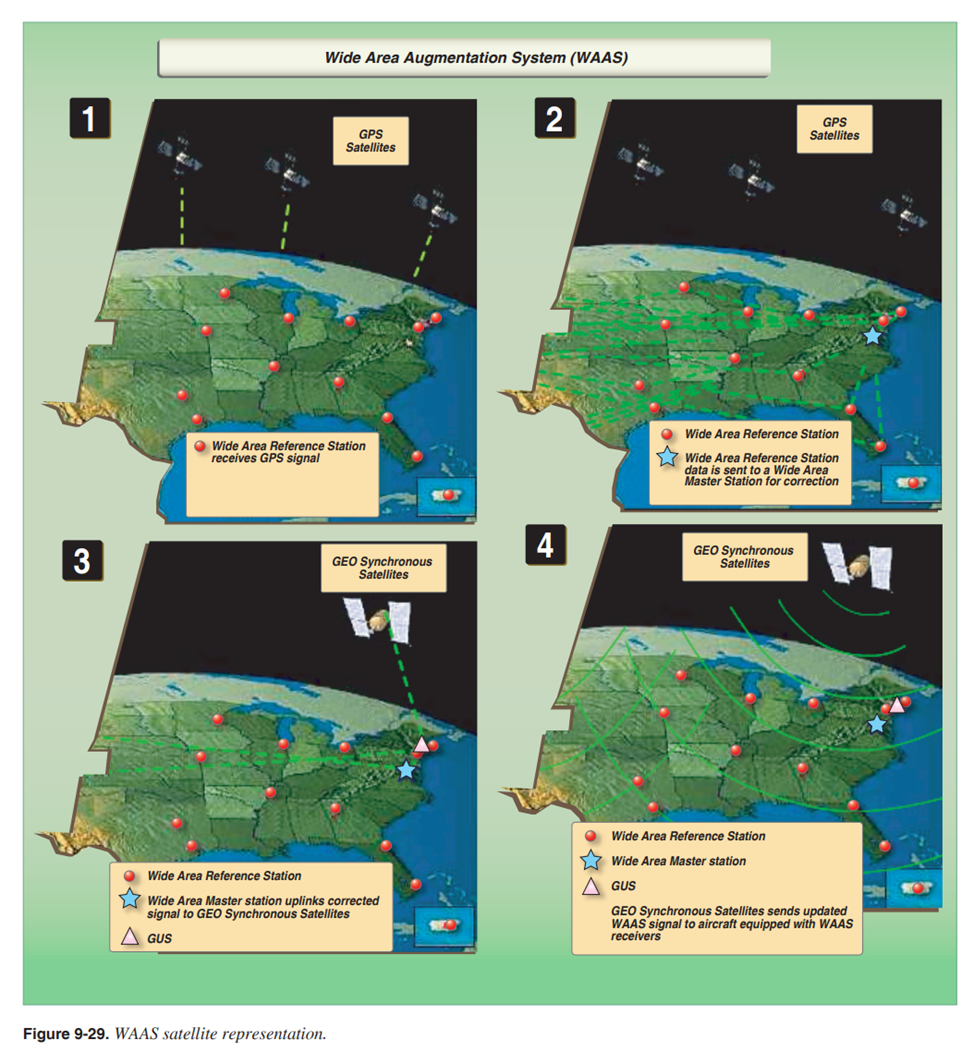
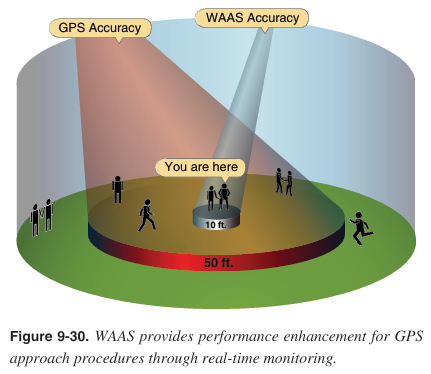
또한 WAAS 덕분에 사실상 GPS 위성이 하나 더 추가된 것이며 이는 수신기에 추가 측정값을 제공하여 GPS의 가용성을 향상시킨다. 실시간 모니터링을 통해 GPS의 무결성이 향상되며 보정 정보를 통해 정확도가 향상된다. [그림 9-30] 이러한 성능 개선 덕분에 GPS/WAAS glidepath를 이용하는 접근 절차가 가능해졌다.
General Requirements
WAAS 항전 장비는 반드시 TSO-C145()나 TSO-146()에 따라 증명되어야 한다. GPS/WAAS 작동 방법은 AFM과 flight manual supplements을 따라야 한다. flight manual supplements에는 수신기가 지원하는 접근 절차의 수준이 명시되어야 한다.
Instrument Approach Capabilities
WAAS 수신기는 기본적인 GPS approach 기능들을 모두 지원하며 추가 기능들을 제공한다. 이러한 추가 기능들 중 가장 큰 이점은 지상 장비나 barometric aiding 없이도 electronic glidepath가 생성되는 것이다. 이는 몇 가지 문제들(예를 들어 추운 날씨의 영향, 부정확한 altimeter setting, 혹은 local altimeter source 부재)을 없애주며 공항에 NAVAIDs가 없어도 접근 절차를 구축할 수 있게 해준다. vertical guidance를 제공하지만 precision approaches에 대한 ICAO Annex 10의 조건은 충족되지 않는 접근 절차들이 위성 항법을 지원하기 위해 개발되었다. 이러한 새로운 절차들은 APV(Approach with Vertical Guidance)라 불리며 다음과 같은 접근들을 포함한다: LNAV/VNAV와 LPV(localizer performance with vertical guidance)
Ground Based Augmentation System(GBAS)
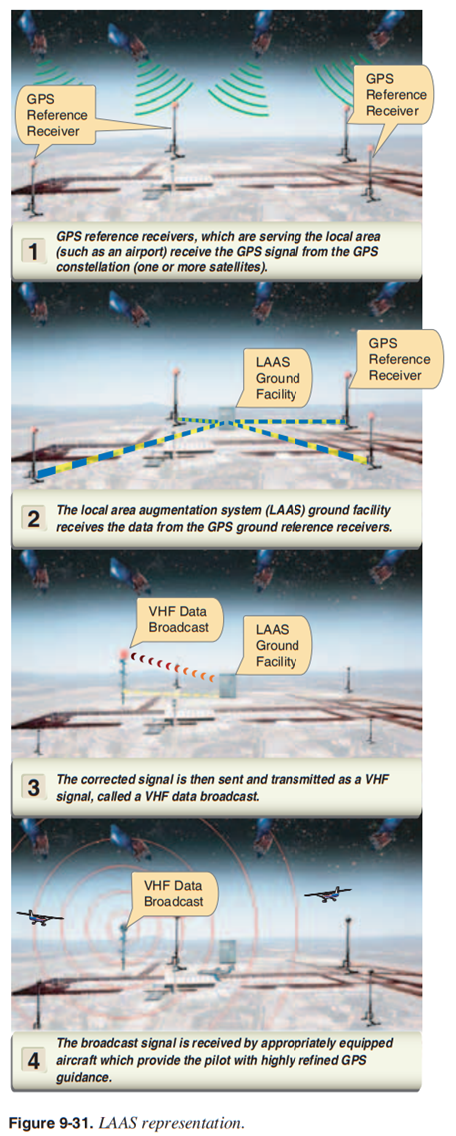
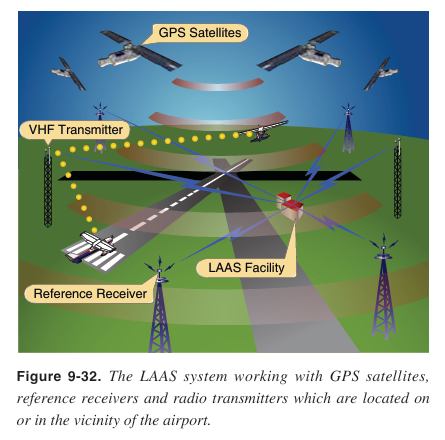
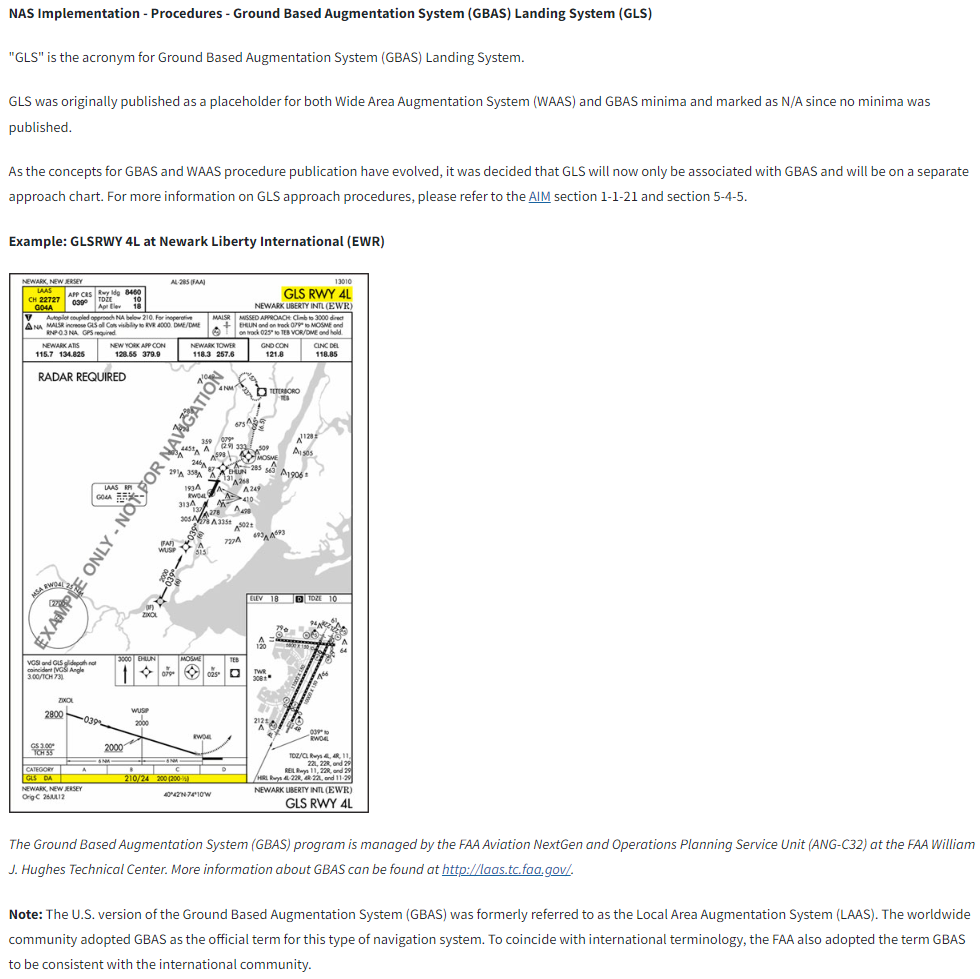
GBAS는 공항의 GPS-reference facility를 사용하는 지상-기반 보강 시스템이다. GPS reference receiver가 GPS 위성의 의사거리와 시간을 측정한 다음 GBAS ground facility가 신호를 다시 전송한다. GBAS를 갖춘 공항에 착륙하는 항공기는 Category I 이상의 접근을 수행할 수 있다(단, 항공기가 적절한 장비를 갖춘 경우). [그림 9-31와 32]
Inertial Navigation System(INS)
INS는 항공기 외부로부터의 입력 없이도 정확하게 항행하는 시스템이다. 이는 완전한 독립형 시스템이다. INS는 조종사에 의해 초기화되며 조종사는 비행 전에 지상에 있는 항공기의 정확한 위치를 시스템에 입력해야 한다. INS는 특정 비행경로를 따르는 WP들로도 프로그래밍 된다.
INS Components
INS는 독립형 항법 시스템으로 간주된다(특히 두 개 이상의 독립 장치가 탑재된 경우). 이 장치는 가속도계(가속도를 측정)와 자이로(방향을 측정)로 구성된다.
IRS(inertial reference system)라 불리는 INS의 후기 버전은 레이저 자이로와 더 효과적인 컴퓨터를 사용한다. 따라서 가속도계를 수평이 되도록, 그리고 진북과 정렬되도록 장착하지 않아도 된다. 컴퓨터는 중력 오차와 방향 오차를 수정하는데 필요한 계산을 처리할 수 있다. 따라서 이 새로운 시스템들은 종종 strap down system이라 불린다. 왜냐하면 가속도계와 자이로가 수평 및 진북을 기준으로 구조물에 장착되지 않는 대신 기체에 스트랩다운 되기 때문이다.

INS Errors
INS와 관련된 주요 오차는 시간에 따라 위치 정보 품질이 저하한다는 것이다. INS는 정확한 위치 입력을 통해 위치를 계산하는데 이는 가속도계와 자이로의 속도 및 방향 입력에 따라 계속하여 변화한다. 가속도계와 자이로에서는 매우 작은 오차들이 발생하기 때문에 시간이 지남에 따라 이러한 오차들이 누적될 수 있다.
가장 좋은 INS/IRS display는 북대서양을 4 ~ 6시간 비행한 후 0.1 ~ 0.4NM의 오류를 나타낸다. 그러나 작고 저렴한 시스템은 시간 당 1 ~ 2NM의 오류를 나타낸다. 이 정도의 정확성은 GPS에 의해 업데이트 될 수 있는 항법 시스템에 적절하다. GPS와 INS/IRS 장치로 구성된 항법 시스템은 두 시스템의 오차와 약점을 해결한다. GPS는 항상 정확하긴 하지만 주기적으로, 그리고 순간적으로 사용하지 못할 수도 있다. 허나 INS는 지속적으로 업데이트되기 때문에 GPS 신호가 손실되는 순간에도 계속 정확하게 작동한다.
※ 다음은 대한항공 항법 교재를 발췌한 내용이다.
5. 관성항법 (Inertial Navigation)
지문항법, 추측항법, 그리고 무선항법이 갖고 있는 공통적인 문제점들 중의 하나가, 외부의 어떤 도움이 없이는 항공기가 자력으로 항로를 찾기 어렵다는 것입니다. 이 문제를 해결하기 위한 수단으로 개발된 항법이 바로 관성항법입니다. 관성항법이란 일종의 자립항법으로 Newton의 관성의 법칙을 그 기본으로 합니다. 초기 관성항법체계는 군사용 로켓을 위해 개발되었습니다. 초기 형태의 관성항법시스템은 2차 세계대전 당시 독일의 V2 로켓에 장착되어 사용되었고, 전쟁이 끝난 후 그 활용범위는 로켓에서 항공기와 우주선의 항법 시스템으로 확대되었습니다. 관성항법이란 항공기가 움직일 때 발생하는 가속도를 가속도계(Accelerometer)를 이용하여 측정하고, 그 측정된 가속도를 적분하여 속도와 이동거리를 구하고, 구해진 정보들을 토대로 항공기의 위치를 파악 비행하는 항법을 말합니다. 이러한 일련의 계산과정을 통해 임의의 한 점에서 다른 한 점으로의 위치이동을 자력으로 할 수 있는 것입니다. 관성항법의 장점은 항공기가 출발 시 출발위치를 정확히 입력해 놓으면 외부의 도움 없이 항법이 가능한데 있으나, 단점은 비행거리에 비례하여 오차가 누적되고, 타 항법 장비들에 비해 부피가 크고 무게가 무거우며, 가격이 비싸다는 것입니다.
Part 2. 관성항법시스템 General
1. 관성항법시스템의 원리
관성항법시스템은 컴퓨터, 가속도계를 탑재하고 있는 Platform, Gyro 등으로 구성됩니다. 관성항법시스템은 선가속도 (Linear Acceleration)와 각가속도 (Angular Acceleration)를 측정하여 아래 열거된 3가지 변화를 구합니다.
- 위치의 변화 (예: 동쪽으로 이동, 서쪽으로 이동)
- Velocity의 변화 (움직이는 속도와 방향)
- Orientation의 변화 (3축을 기준으로 한 Rotation)
2. 관성항법시스템 초기화 (Initialization)
관성항법시스템이 작동하기 위해서는 최초의 위치정보를 사람이 직접 입력하거나 GPS등으로부터 가져와야 합니다. 이 과정을 Align이라고 합니다. 정확한 Align은 항공기가 정지된 상태에서 이루어져야 하며, 지역에 따라 차이가 있으나 보통 수분이 소요됩니다. 시스템의 Align이 끝나면 그때부터 Motion Sensor들을 통해서 얻어지는 정보를 계산하여 항공기의 새로운 위치, 속도, 진행 방향을 구하게 됩니다. 관성항법시스템의 장점은 시스템이 한번 Align인 된 후 항공기의 위치, 속도, 진행 방향을 구하는데 어떠한 외부 도움도 필요 없다는데 있습니다. 그러나 시스템의 가격과 복잡성으로 인해 실질적으로는 제한적인 분야에서만 사용되고 있습니다.
3. Gyroscope과 가속도계의 기능
Gyroscope은 각속도 (Angular Velocity)를 측정합니다. 측정된 각속도를 적분하여 현재 항공기의 Orientation을 알 수 있습니다. 예를 하나 들어보겠습니다. 눈을 감고 차에 타고 있다고 상상 해보겠습니다. 눈을 감고 있어도 차가 왼쪽으로 도는지, 오른쪽으로 도는지 또는 언덕을 올라가는지 내려가는지 느낄 수 있습니다. Turn Left, Turn Right, Go up, Go down 이 느낌이 바로 각속도입니다.
가속도계는 선가속도 (Linear Acceleration)를 측정합니다. 가속도계는 시스템의 3축에 각각 장착되어 각 축 방향에서 발생하는 가속도를 측정합니다. 다시 눈을 감고 차에 타고 있다고 상상해 보겠습니다. 선가속도를 측정한다는 것은 차가 좌우 위아래로 움직이고 있는 것을 느끼는 것이 아니라, 차가 가속을 하게 되면 몸이 뒤로 밀리면서 의자에 등이 밀착하게 되고, 속도를 줄이면 몸이 앞으로 기울게 됨을 느끼는 것입니다. 엘리베이터가 위로 올라가면 처음에는 몸이 무거워지면서 몸이 더 무거워짐을 느끼고, 엘리베이터가 아래로 내려가면 처음에는 몸이 가벼워지면서 위로 뜨는 느낌이 납니다. 이러한 느낌이 바로 가속도이며, 이런 가속도를 측정하는 것이 바로 가속도계입니다.
현재의 각속도와 현재의 선가속도를 Tracking하여 시스템의 선가속도를 구할 수 있으며, 구해진 선가속도를 적분하여 velocity를 구하고, 그 Velocity를 다시 적분하여 위치를 구할 수 있습니다. 이는 눈을 감고 차에 있으면서, 차가 좌회전을 한 후 속도를 높이는 것을 느끼는 것과 같은 것입니다.
4. 관성항법시스템의 Error
시스템이 가속도와 각속도를 측정하는 과정에서 작은 오차가 발생하고, 이 작은 오차는 Velocity와 Position이 구해지는 과정에서 계속 축적됩니다. 새로운 위치는 기존의 위치로부터 구해지기 때문에 이 작은 오차는 최초로 항공기 위치가 압력 된 이후부터 시간에 비례하여 점점 커집니다. 축적되는 오차 때문에 관성항법장비의 위치는 타 항법장비로부터 구해진 정보를 이용하여 지속적으로 수정되어야 합니다. 현재 관성항법시스템은 더 높은 정확도를 제공하는 타 항법시스템의 보조 시스템 수준에서 사용되고 있습니다. 타 항법시스템의 가장 좋은 예가 GPS입니다. GPS와 같은 타 항법시스템들과 같이 사용됨으로써, 안정적인 위치 정보제공이 가능해졌으며, 타 항법시스템을 사용할 수 없을 경우 단기적 대체 항법수단으로 사용될 수 있습니다.
'Instrument Flying Handbook(2012) > 9: Navigation Systems' 카테고리의 다른 글
| (2) Basic Radio Principles (0) | 2023.03.08 |
|---|---|
| (3) Traditional Navigation Systems (2) | 2023.03.08 |
| (5) Instrument Approach Systems (0) | 2023.03.08 |
| (6) Required Navigation Performance (0) | 2023.03.08 |
| (7) Flight Management Systems (0) | 2023.03.08 |