Instrument Approach Systems
en route와 terminal 운영에 대해 승인된 대부분의 항법 시스템들(예를 들어 VOR, NDB, 그리고 GPS)은 IAP를 수행하도록 승인될 수 있다. 미국에서 가장 일반적으로 사용되는 시스템은 ILS, SDF(simplified directional facility), LDA(localizer-type directional aid), 그리고 MLS(microwave landing system)이다. 이러한 시스템들은 다른 항법 시스템과 개별적으로 작동한다. 현재 새로운 시스템들이 개발되고 있다(예를 들어 WAAS와 LAAS). 그 밖의 시스템들은 특수한 용도를 위해 개발되었다.
Instrument Landing System(ILS)
ILS 시스템은 특정 활주로에 대한 경로 안내와 고도 안내를 모두 제공한다. ILS 시스템은 정밀 계기 접근 절차나 정밀 접근을 수행하는데 사용된다. [그림 9-33] 이 시스템은 다음과 같은 구성요소로 이루어진다:

1. 활주로로부터 연장된 중심선을 따라 수평(좌/우) 안내를 제공하는 localizer.
2. 활주로 touchdown point를 향하여 수직(위/아래) 안내(보통 3도 경사각)를 제공하는 glideslope(GS).
3. 접근 경로를 따라 거리 정보를 제공하는 marker beacons.
4. 계기 비행에서 시계 비행으로 전환하는데 도움을 주는 approach lights.
다음 요소들은 시스템의 특정 구성요소는 아니지만 안정성과 유용성을 높이기 위해 통합될 수 있다:
1. compass locator: compass locator는 en route NAVAID에서 ILS 시스템으로의 transition을 제공한다. 또한 이는 holding procedures, localizer course tracking, marker beacon 위치 식별, 그리고 ADF approach를 위한 FAF를 지원한다.
2. GS 송신기와 결합된 DME: 접근 절차에 명시된 경우 이는 touchdown까지의 거리 정보를 제공하거나, 혹은 인근 시설과 연관된 거리를 제공한다.
ILS approach는 공항의 장비와 조종사의 경험 수준에 따라 세 가지 유형으로 분류된다. Category I approach는 touchdown으로부터 200ft 이상의 접근 높이를 제공한다. Category II approach는 touchdown으로부터 100ft 이상의 접근 높이를 제공한다. Category III approach는 접근에 대해 더 낮은 minimums를 제공하며 결심 고도가 없다. Category I approach를 수행하기 위해서는 조종사가 계기 한정을 소지해야 하며 항공기에 적절한 장비가 탑재되어야 한다. Category II 및 III approach는 조종사, 지상 장비, 그리고 항공기 장비에 대한 특별한 증명을 필요로 한다.
ILS Components
Ground Components
ILS는 다양한 지상 시설을 사용하며 이러한 시설들이 ILS 시스템이나 그 외 접근의 일부로 사용될 수 있다. 예를 들어 compass locator는 NDB approaches에서 사용될 수 있다.
Localizer
localizer(LOC) 지상 안테나는 계기 활주로의 연장선에 위치하며 충돌 위험을 방지하기 위해 departure end of the runway에 배치된다. 이 장치는 MM(midle marker)와 OM(outer marker)를 향해 course가 만들어지는, 그리고 반대 방향으로도 유사한 course가 만들어지는 특정 패턴을 방사한다. 이는 각각 front course와 back course라 불린다. localizer는 108.1~111.95MHz(소수점 첫째 자리가 홀수인 것만 해당)에서 경로 안내를 제공한다. 이는 안테나로부터 18NM 거리에서, 그리고 안테나 표고로부터 4,500ft 고도에서 활주로 threshold까지 하강경로에 걸쳐 제공된다. [그림 9-34]
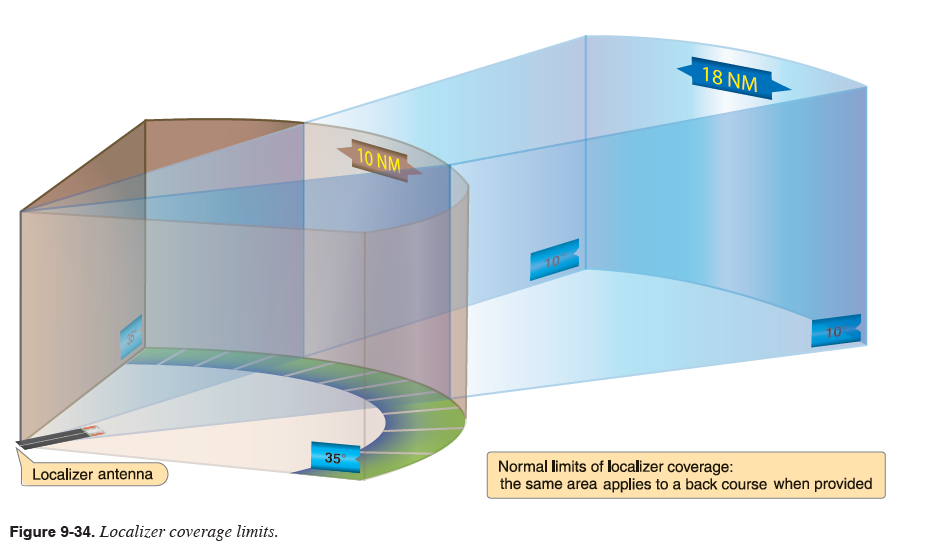
localizer course witdh란 course를 따른 임의 지점에서의 full “fly-left”(CDI needle이 좌측으로 fully deflected)와 full “fly-right”(CDI needle이 우측으로 fully deflected) 각변위로 정의된다. 각각의 localizer 시설은 정기적으로 송신되는 세 글자의 지정부호를 통해 청각적으로 식별된다. ILS 식별부호의 앞에는 문자 “I”(∙∙)가 붙는다. 예를 들어 Springfield, Missouri의 ILS localizer는 ISGF 식별자를 전송한다. localizer 주파수는 음성 기능을 포함하고 있으므로 관련 ATC 시설이 접근 및 착륙 지시를 발부할 때 이를 사용할 수 있다.
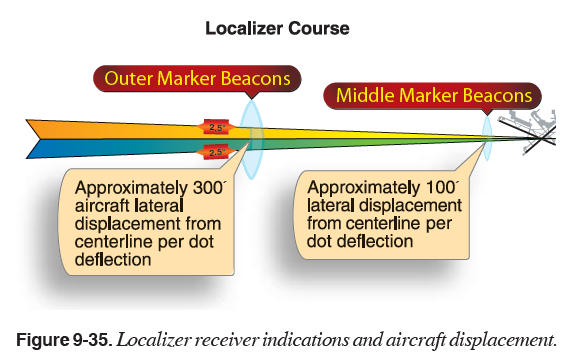
localizer course는 일반적으로 5도로 매우 좁다. 따라서 지시침의 감도가 매우 높다. 이러한 course width을 사용할 때 항공기가 중심선으로부터 왼쪽이나 오른쪽으로 2.5도에 놓이면 full-scale deflection이 표시된다. 이러한 감도는 착륙 활주로에 대한 정확한 방향정위를 허용한다. 4분1의 이하의 scale deflection이 유지되어야 항공기가 활주로와 정렬될 것이다.
Glideslope(GS)
GS는 지상 시설의 방사 패턴을 생성, 수신, 그리고 표시하는 시스템을 말한다. glidepath란 FAF에 접근하는데 사용되는 고도가 GS와 교차하는 지점으로부터 touchdown zone까지 하강하는 경로이다. GS 장비는 approach end of the runway로부터 대략 750~1,250ft 지점에, 그리고 중심선의 한쪽으로부터 400~600ft 지점에 위치한다.
GS 장비가 투영하는 경로는 기본적으로 localizer가 생성하는 경로와 동일하다. GS의 투영 각도는 일반적으로 2.5 ~ 3.5도로 조정된다. 따라서 이는 활주로 표고로부터 약 200ft에서 MM과 교차하며 약 1,400ft에서는 OM과 교차한다. 일반적인 최대 GS 각도로는 standard minimum obstruction clearance가 달성될 수 없는 경우에는 GS 장비가 approach end of the runway로부터 더 멀리 이동되거나(단, 활주로 길이가 허용하는 경우), 혹은 GS 각도가 최대 4도까지 증가될 수 있다.
GS 송신기는 localizer와는 달리 final approach의 front course로만 신호를 방사한다. 이 시스템은 back course에서 수직 안내를 제공하지 않는다. glide path의 두께는 보통 1.4도이다. touchdown 지점으로부터 10NM 지점에서 이는 약 1,500ft의 수직 거리이며 touchdown 지점에서는 수 피트로 좁혀진다.
Marker Beacons
ILS 시스템에는 보통 두 개의 VHF marker beacon(outer와 middle)이 사용된다. [그림 9-35] Category II operation이 증명된 곳에서는 세 번째 beacon(inner)이 사용된다. marker beacon은 ILS back course에 FAF를 나타내기 위해 설치될 수도 있다.
OM은 공항으로부터 4~7마일 지점에 위치한다. 이는 적절한 고도에서 항공기가 glidepath를 교차할 위치를 나타낸다. MM은 landing threshold로부터 대략 3,500ft 지점에 위치한다. 여기서 GS 중심선은 touchdown zone elevation으로부터 약 200ft 상공에 위치한다. IM(만약 설치된 경우)은 MM과 landing threshold 사이에 위치한다. 이는 Category II ILS approach를 수행하는 항공기가 glidepath의 결심 고도에 위치하는 지점을 나타낸다. back-course marker(만약 설치된 경우)는 back-course FAF를 나타낸다.
Compass Locator
compass locator는 출력이 낮은 NDB이다. 이는 ADF 수신기에 의해 수신 및 표시된다. 이것이 ILS front course와 함께 사용될 경우 compass locator 시설이 outer 및/혹은 MM 시설과 결합된다. outer locator의 식별부호는 이와 연관된 LOC 식별자의 첫 두 글자로 구성된다. 예를 들어 Dalls/Love Field(DAL)의 outer locator는 “DA”로 식별된다. DAL의 middle locator는 마지막 두 글자인 “AL”로 식별된다.
Approach Lighting Systems(ALS)
ILS의 정상 접근 및 강하는 두 가지 단계로 나뉜다: 무선 안내만을 사용하는 계기 접근 단계, 그리고 시계 접근 단계(정확성 및 안정성을 위해선 지상의 runway environment를 육안으로 확인하는 것이 중요한 단계). 계기 접근 도중 가장 중요한 시점은 조종사가 착륙을 수행할지, 혹은 실패 접근을 수행할지를 결정하는 때이다(특히 low ceiling/visibility 조건에서). 활주로 시단에 가까워지면 visual glidepath가 각각의 등화들로 나뉜다. 이 시점에서는 runway touchdown zone marker를 참조하여 접근을 계속해야 한다. 안정적 시계 전환을 제공하기 위하여 ALS의 등화들은 touchdown으로부터 먼 거리까지 비출 수 있다.
조종사는 즉시 ALS를 육안으로 식별해야 한다. 따라서 접근을 시작하기 전에 ALS의 유형을 아는 것이 중요하다. 계기 비행을 수행하기 전에 목적지 공항의 계기 접근 차트와 A/FD를 통해 등화 시설의 특정 유형을 확인한다. 저시정 조건에서는 활주로로 향하는 방향정위가 어려울 수도 있다. 가장 일반적인 ALS 시스템 중 일부가 그림 9-36에 나타나있다.
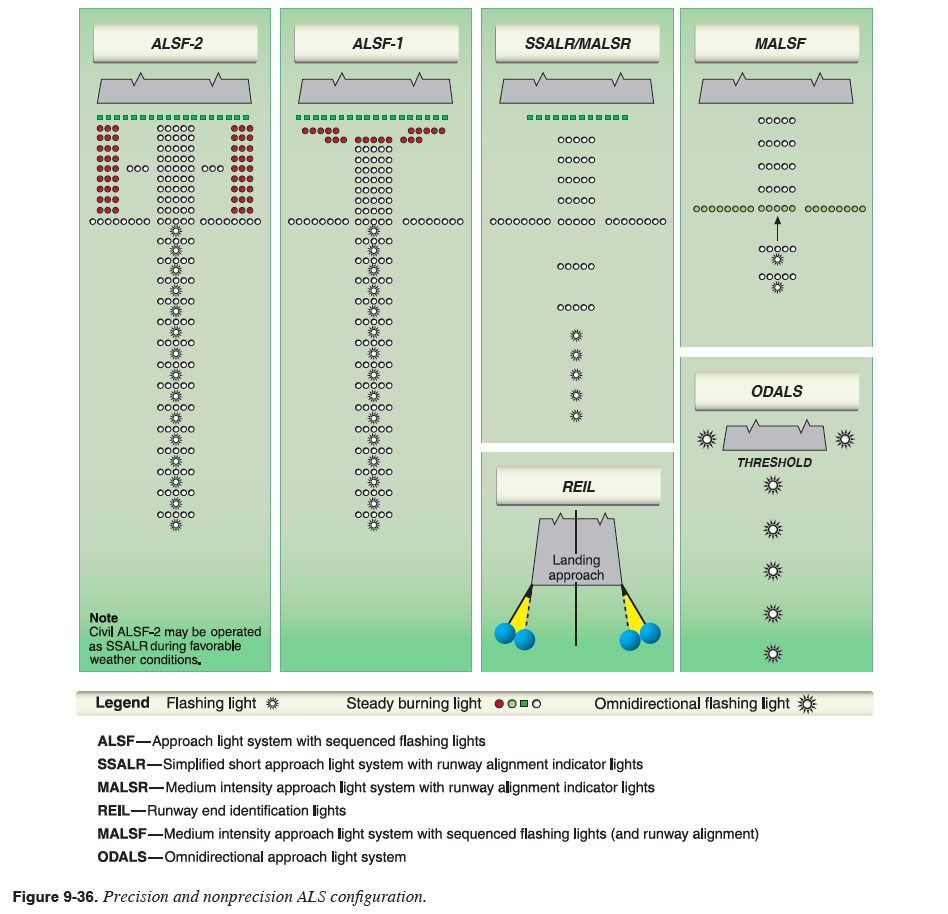
많은 대형 공항에 high-intensity flasher system(종종 “the rabbit”이라 불림)가 설치되어 있다. 이 점멸등은 approach lights를 따라 순차적으로 깜박이는 일련의 밝은 청백색 빛으로 구성되어 있다. 이는 빛 덩어리가 활주로를 향해 움직이는 효과를 제공한다. “the rabbit”은 보통 1초에 2번 활주로를 향해 움직인다.
REIL(runway end identifier light)은 계기 활주로의 approach end를 빠르고 확실하게 식별하기 위해 설치된다. 이 시스템은 한 쌍의 점멸등으로 구성된다. 이는 활주로 시단의 양 쪽에 가로로 배치되며 접근 구역을 비춘다.
VASI(visual approach slope indicator)는 활주로 접근 도중 시각적 하강 안내 정보를 제공한다. standard VASI는 visual glidepath를 투영하는 light bars로 이루어지며 이는 접근 구역 내에서 안전한 장애물 회피를 제공한다. 일반적인 GS 각도는 3도이다. 허나 적절한 장애물 회피를 위해 4.5도까지 높아질 수도 있다. ILS가 제공되는 활주로의 경우에는 VASI 각도가 보통 glideslope 각도와 일치한다. 좌/우 경로에 대한 시각적 안내는 활주로 등화와의 정렬을 통해 얻을 수 있다. standard VASI는 2-, 3-, 4-, 6-, 12-, 혹은 16-개의 등화들로 구성되어 있으며 이들은 downwind light bar와 upwind light bar에 정렬된다. long-bodied aircraft에 서비스를 제공하는 일부 공항에는 three-bar VASI가 있다. 이는 특정 활주로에 대해 두 개의 visual glidepath를 제공한다. 첫 번째 glidepath는 표준 VASI가 제공하는 것과 동일하다. 두 번째 glidepath는 첫 번째 glidepath보다 약 25% 높으며 이는 long-bodied aircraft를 위해 설계되었다.
VASI의 기본 원리는 적색과 백색의 색깔 차이이다. 각 등화의 상부는 백색 빔을, 그리고 하부는 적색 빔을 투영한다. above the glidepath인 경우에는 두 개의 bars가 흰색으로 보인다. glidepath를 향해 하강하면 upwind bars의 색깔이 흰색에서 분홍색으로, 그리고 분홍색에서 빨간색으로 바뀐다. 적절한 glidepath에 있을 때 항공기는 downwind bars를 overshoot 하고 upwind bars를 undershoot 한다. 그 결과 downwind(더 가까운) bars가 흰색으로, 그리고 upwind bars가 빨간색으로 보인다. glidepath 아래에서는 두 개의 light bars가 빨간색으로 보인다. glidepath를 향해 상승하면 downwind bars의 색깔이 빨간색에서 분홍색으로, 그리고 분홍색에서 흰색으로 바뀐다. glidepath 아래에 있으면 안전한 장애물 간격이 존재하지 않을 수도 있다. standard two-bar VASI가 그림 9-37에 나타나있다.

ILS Airborne Components
ILS 시스템을 위한 공중 장비는 localizer, GS, marker beacons, ADF, 그리고 DME를 위한 각각의 수신기들과 표시 계기들을 포함한다.
VOR 수신기는 보통 localizer 수신기 역할을 함께 수행한다. 일부 수신기는 별도의 스위치를 통해 그 기능을 선택할 수 있다. 허나 대부분의 수신기는 108 ~ 111.95MHz 사이의 소수점 첫째자리에 홀수가 선택되었는지를 감지하여 VOR과 LOC를 자동으로 전환한다. 만약 그렇지 않다면 동일한 노브와 스위치를 통해 VOR 주파수와 localizer 주파수를 조정할 수 있으며 CDI는 VOR radial에서와 마찬가지로 “on course”를 나타낸다.
일부 GS 수신기는 별도로 조정된다. 그러나 GS는 보통 localizer 조정 시 자동으로 적절한 주파수로 동조된다. 108.1 ~ 111.95MHz 대역 사이 40개의 localizer 채널은 각각 해당 GS 주파수와 쌍을 이룬다.
localizer indicator에 GS needle도 포함되어 있다면 이 계기를 보통 cross-pointer indicator라 부른다. 서로 교차한 수평(GS) 지시침과 수직(localizer) 지시침은 5개의 점들을 거쳐 자유롭게 이동하여 localizer course와 glidepath의 위치를 표시한다.

항공기가 glidepath에 있을 때 지시침은 reference dots에 수평으로 정렬된다. glidepath는 localizer course보다 훨씬 좁기 때문에(full up부터 full down까지 대략 1.4도) on-path로부터의 항공기 편차에 매우 민감하다. GS 교차 시 올바른 하강률이 설정되었다면 매우 작은 수정을 통해 항공기 정렬이 유지될 수 있다.
지시침을 작동시키기에 충분한 전압이 수신되었다면 localizer warning flag와 GS warning flag가 계기에서 사라진다. 이러한 flag는 불안정한 신호나 수신기 오작동이 발생할 때 나타난다.
OM은 낮은 음조, 초당 2회의 연속적인 dash(-), 그리고 보라색/파란색 beacon light를 통해 식별된다. MM은 중간 음조, 분 당 95번의 dot/dash(∙-), 그리고 노란색 marker beacon light를 통해 식별된다. IM는 높은 음조, 초당 6회의 연속적인 dot(∙), 그리고 흰색 marker beacon light를 통해 식별된다. BCM(back-course marker)는 높은 음조, 분 당 72 ~ 75번의 two dot(∙), 그리고 흰색 marker beacon light를 통해 식별된다. 대다수의 marker beacon 수신기는 그 감도를 high나 low로 선택할 수 있다. 낮은 감도는 위치를 가장 뚜렷하게 나타내므로 접근(approach) 도중 사용해야 한다. 높은 감도는 항공기가 marker beacon site에 접근하고 있다는 경고를 일찌감치 제공한다.



ILS Function
항공기가 localizer 중심선으로부터 왼쪽이나 오른쪽에 있는지를 나타내기 위하여 localizer 지시침이 편향된다. 이는 항공기의 위치나 heading과 관련되지 않는다. OBS를 돌린다 하여 localizer 지시침의 작동에 영향을 미치지는 않는다. 허나 LOC inbound course가 course index에 위치하도록 OBS를 돌리는 것이 유용하다. front course를 inbound 하는 도중, 혹은 back course를 outbound 하는 도중에는 course 지시가 방향성을 유지한다. (그림 9-38의 C, D, 그리고 E를 참조)
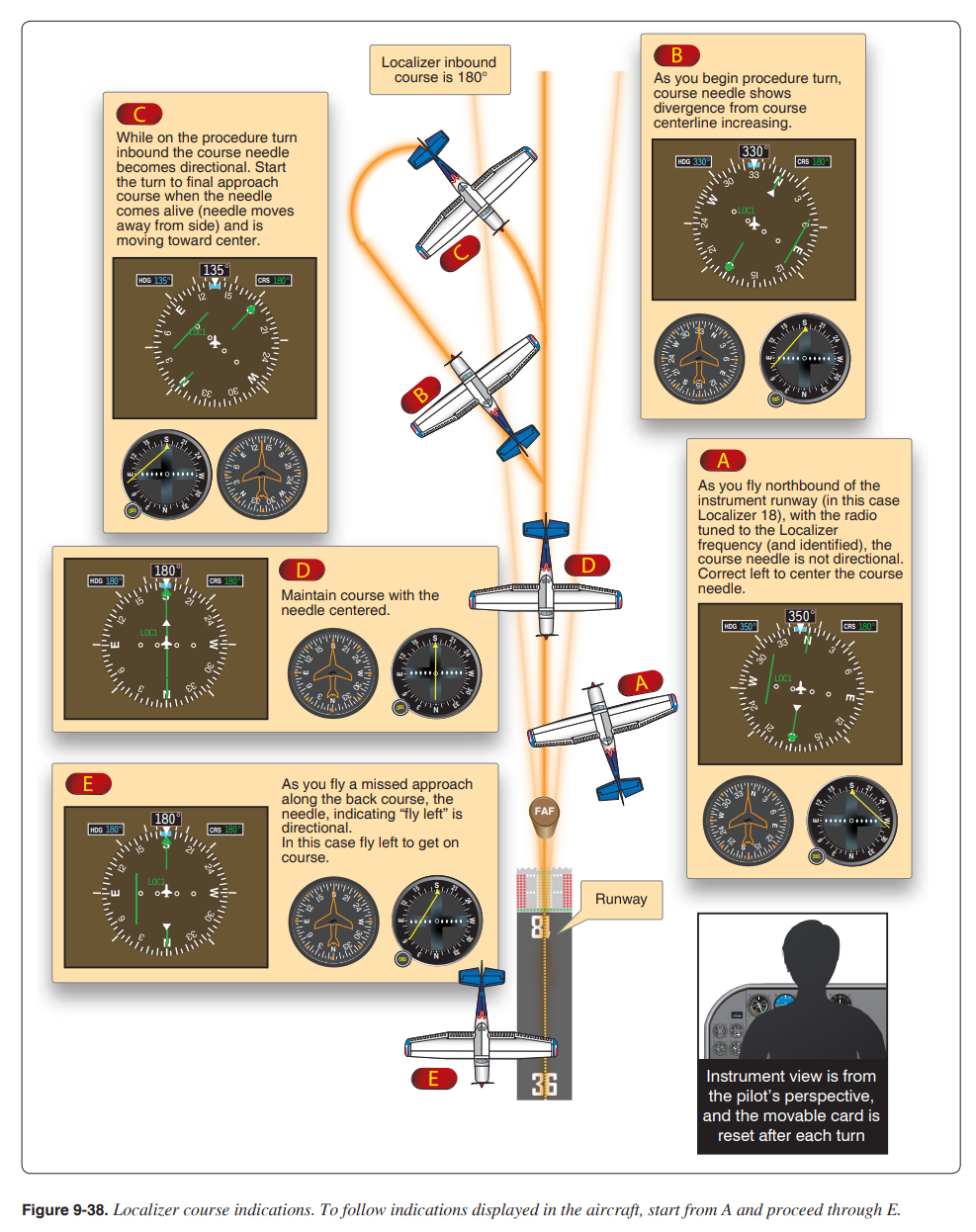
back course를 inbound 하는 도중, 혹은 front course를 outbound 하는 도중에는 on-course를 향한 heading 수정이 지시침이 편향된 방향의 반대쪽에서 이루어진다(단, 항공기가 reverse sensing 기능을 갖춘 경우 제외). 이를 보통 “flying away from the needle”이라 부른다. (그림 9-38의 A와 B 참조). 접근을 위해 back course 신호를 사용해서는 안 된다(단, 해당 활주로에 대해 back course 접근 절차가 게재되었으며 ATC로부터 그 접근이 승인된 경우 제외).
localizer 중심선에 도달하였다면 CDI가 중심으로부터 벗어나기 전까지 inbound heading을 유지한다. 편류 수정은 작아야 하며 course가 좁아짐에 따라 편류 수정이 비례적으로 감소해야 한다. OM에 도달하기 전에 편류 수정이 정확하게 설정되어야 접근이 완료될 수 있으며 이때 heading 수정은 2도를 넘지 않아야 한다.
OM에서 MM으로 하강할 때 조종사의 기술이 가장 많이 필요하다. 이때 조종사는 localizer course를 유지해야 하고, 적절한 하강률을 위해 pitch 자세를 조정해야 하며, 적절한 속도를 위해 출력을 조정해야 한다. 이와 동시에 조종사는 고도계를 확인해야 하며 착륙을 위한 시계 전환이나 복행을 준비해야 한다. CDI/glidepath 지시침의 지시와 localizer/glidepath 중심선으로부터의 항공기 위치 사이의 관계를 알게되면 정확한 계기 해석 및 항공기 제어의 필요성을 이해할 수 있다.
항공기가 glidepath로부터 위나 아래에 있는지를 나타내기 위하여 GS 지시침이 편향된다. 항공기가 glidepath 위에 있으면 지시침이 아래로 편향된다. 항공기가 glidepath 위에 있으면 지시침이 위로 편향된다. [그림 9-39]

ILS Errors
ILS와 그 구성 요소는 아래에 나열된 특정 오류의 영향을 받는다. localizer 신호와 GS 신호는 space waves와 마찬가지로 단단한 물체로부터 반사되는 영향을 받는다.
1. Reflection. 지상의 차량, 그리고 5,000ft(AGL) 이하로 비행하는 다른 항공기는 접근 중인 항공기의 신호를 방해할 수 있다.
2. False glideslope. GS 지상 시설은 올바른 경로뿐만 아니라 더 높은 각도의 경로를 추가적으로 만들어낸다. 이러한 false glideslope은 약 9 ~ 12도에서 발생한다. 일정한 고도로 다양한 false glideslopes를 통과하면 GS needle과 GS warning flag가 오락가락 하는 것을 확인할 수 있다. 이러한 false glideslopes 중 하나에 설정될 경우 깊은 하강률이 필요하거나, 혹은 GS needle이 반대 방향을 지시한다. 허나 접근 차트에 지정된 고도(glideslope intercept altitude)에서 접근이 수행되면 이러한 false glideslope가 발생하지 않는다.

Marker Beacons
marker beacon 송신기는 매우 낮은 출력의 지향성 안테나를 사용하므로 송신기로부터 멀리 떨어진 곳에서는 신호가 수신되지 않는다. 보통 공중 수신기가 꺼져있거나 수신기 감도가 잘못 설정되어 있을 때 신호 수신 문제가 발생한다.
일부 marker beacon 수신기는 무게와 비용을 줄이기 위하여 자체 전원 공급 장치가 없도록 설계되었다. 이러한 장치는 다른 라디오의 전원을 사용한다(보통 ADF). 이로 인해 일부 항공기에서 marker beacon 수신기를 작동시키기 위해선 ADF를 켜야 한다(허나 warning placard가 필요하지는 않음). 또 다른 문제의 원인은 “HIGH/LOW/OFF” 스위치일 수 있는데 이러한 스위치는 수신기의 감도를 선택할 뿐만 아니라 수신기를 작동키기 때문이다. 보통 “test” 기능은 marker beacon lights의 전구가 작동하는지만 점검한다. 따라서 일부 장치에서는 marker beacon 수신기가 실제로 켜져 있는지를 확인할 실용적 방법이 없다.
Operational Errors
1. ILS 지상 장비의 기본 사항을 이해하지 못함(특히 course 범위의 차이에 대하여). localizer course가 VOR 수신기에서 사용되기 때문에 localizer course와 VOR radial에 대한 intercept 및 track 기법이 동일하다 가정하는 경우가 있다. CDI는 localizer course에서 더 민감하고 빠르다.
2. ILS로 전환하는 도중 방향 감각 상실. 이는 계획이 부적절할 때, 그리고 사용 가능한 모든 공중 장비들을 사용하지 않고 하나의 수신기만 의존할 때 발생한다. 하나의 수신기가 고장날 수도 있으므로 이용 가능한 모든 장비들을 사용한다.
3. localizer course에서 방향 정위 상실. 이는 위에서 언급한 첫 번째 오류로 인해 발생한다.
4. 부적절한 localizer 교차 각도. 교차 각도가 크면 보통 overshoot이 발생하며 방향 정위 상실로 이어질 수 있다. 만약 가능하다면 지시침의 움직임이 처음 나타날 때 즉시 localizer course heading으로 선회한다. inbound course에 locator나 NDB가 있다면 ADF 수신기가 방향을 결정하는데 도움을 제공한다.
5. CDI와 glidpath 지시침을 chase 함(특히 비행 전에 접근을 충분히 연구하지 않은 경우).
Simplified Directional Facility(SDF)
SDF는 ILS localizer와 유사한 final approach course를 제공한다. SDF course는 활주로와 정렬되어 있을 수도 있고 정렬되어 있지 않을 수도 있다. 그리고 SDF course는 standard ILS localizer보다 더 넓을 수도 있다(즉 덜 정교함). 이용 가능한 off-course 지시는 course 중심선으로부터 양 쪽으로 35도로 제한된다. course 중심선으로부터 35 ~ 90도 사이의 영역에서는 계기 지시를 무시해야 한다.
SDF는 항공기 계기가 만족스럽게 작동할 수 있을 정도로 충분한 신호를 제공해야 한다. 그 범위는 SDF 안테나 시스템의 중심으로부터 18NM 거리까지, 중심선으로부터 양쪽 10도 각도로, 그리고 수평면으로부터 7도 각도로 확장된다. final approach course와 활주로 중심선이 수렴하는 각도가 30도를 초과해서는 안 된다. 조종사는 이 각도에 유의해야 한다. 왜냐하면 approach course는 안테나로부터 시작되므로 활주로 시단 너머로 계속 접근하면 항공기가 활주로 중심선이 아닌 SDF offset 위치로 이동하기 때문이다.
송신기에서 방출되는 SDF 신호의 경로 폭은 6도나 12도로 고정된다. 이는 최대의 비행 품질과 최적의 접근 경로 품질을 제공하기 위함이다. 세 글자의 식별자가 SDF 주파수에서 코드로 전송된다. station 식별자 앞에 문자 “I”(∙∙)가 전송되지 않는다. 예를 들어 레바논 미주리의 SDF 식별자는 LBO이다.

Localizer Type Directional Aid(LDA)
LDA는 localizer에 필적하는 유용성과 정확성을 제공하긴 하지만 ILS의 일부는 아니다. LDA의 경로 폭은 3 ~ 6도이므로 SDF보다 더 정밀한 접근 경로를 제공한다. 일부 LDA에는 GS가 장착되어 있다. LDA 경로는 활주로와 정렬되지 않는다. 허나 활주로 중심선과 LDA 경로 사이의 각도가 30도를 초과하지 않는다면 straight-in minimums가 게재될 수 있다. 만약 이 각도가 30도를 초과하면 circling minimums만이 게재된다. LDA 주파수에서 전송되는 코드는 “I”로 시작되는 세 글자의 식별자이다. 예를 들어 캘리포니아 Van Nuys의 LDA 식별자는 I-BUR이다.

Microwave Landing System(MLS)
MLS는 정확한 정렬 및 하강을 위한 정밀 항법 안내를 제공한다. 이는 방위각, 고도, 그리고 거리를 제공한다. 수평 안내와 수직 안내는 종래의 course deviation indicators에 표시되거나 조종실 화면에 표시될 수 있다. 거리 정보는 종래의 DME indicators에 표시되거나 이 또한 조종실 화면에 표시될 수 있다. [그림 9-40]

시스템은 다섯 가지 기능(approach azimuth, back azimuth, approach elevation, range, 그리고 data communication)으로 나뉠 수 있으며 이를 azimuth station이 수행한다. azimuth station은 방위각 항법 안내를 제공할 뿐만 아니라 기본 데이터를 전송한다. 이러한 기본 데이터는 착륙 시스템의 운영과 관련된 정보, 그리고 지상 장비의 성능에 대한 자문 정보를 전송한다.
Approach Azimuth Guidance
azimuth station은 5031 ~ 5091MHz 주파수 범위에 있는 200개 채널들 중 하나를 통해 MLS 각도와 데이터를 전송한다. 해당 장비는 보통 stop end of the runway로부터 약 1,000ft 떨어진 지점에 위치한다. 방위각의 범위는 활주로 중심선으로부터 양쪽으로 최소 40도 이상 확장되고, 최소 15도의 각도로 최소 20,000ft 고도까지 연장되며, 최소 20NM까지 이어진다.
MLS 신호의 수신 및 처리를 위해선 별도의 공중 장비가 필요하다. MLS의 data communication 기능은 송신 시스템의 상태와 기타 정보(예를 들어 기상, 활주로 상태 등등)에 대한 청각 정보를 제공할 수 있다. MLS는 M으로 시작하는 4개의 식별자를 모스 부호로 분 당 6번 전송한다. MLS 시스템은 자체적 모니터링을 수행하며 시스템 작동 상태에 대한 지대공 데이터 메시지를 전송한다. 정기 점검이나 비상 점검 도중에는 코드 식별 부호가 전송에서 사라진다. 현재 이 시스템은 거의 설치되어 있지 않다.
'Instrument Flying Handbook(2012) > 9: Navigation Systems' 카테고리의 다른 글
| (3) Traditional Navigation Systems (2) | 2023.03.08 |
|---|---|
| (4) Advanced Technologies (1) | 2023.03.08 |
| (6) Required Navigation Performance (0) | 2023.03.08 |
| (7) Flight Management Systems (0) | 2023.03.08 |
| (8) Head-Up Display (0) | 2023.03.08 |