복행을 수행하기로 결정하였다면 침하율을 막기 위해 throttles를 이륙 출력으로 높이고 pitch를 조절해야 한다. 속도가 충분해지면 비행기를 climb pitch 자세로 만든다. 순차적으로 수행되는 이러한 동작들은 침하율을 막으며 비행기가 상승할 적절한 자세로 만든다. 초기 target airspeed는 VY나VX(장애물이 존재하는 경우)이다. 속도가 충분해지면 flaps를 full position에서 intermediate position으로 올려야 한다. positive rate of climb가 표시되었으며 활주로에 접지할 가능성이 없다면 landing gear를 올려야 한다. 그런 다음에 남은 flaps를 올려야 한다. [그림 13-11]
만약 지상이나 공중의 항적으로 인해 복행을 시작하였다면 조종사는 해당 항적을 계속 시야에 두기 위해 측면으로 기동하는 것을 고려해야 한다. 이 경우 활주로/착륙 지역으로부터 약간 벗어나기 위해 선회를 수행해야 할 수 있다.
복행을 시작할 때 비행기가 착륙 접근을 위해 trim 되어 있었다면 비행기가 상승하면서 가속함에 따라 많은 양의 forward elevator/stabilator pressure가 요구된다. 조종사는 원하는 pitch 자세를 유지하기 위해 적절한 forward pressure를 가해야 한다. trim을 즉시 조절해야 한다. 업무량이 허용하는 대로balked landing checklist를 검토해야 한다.
landing gear보다 flaps를 먼저 올려야 하는 두 가지 이유가 있다. 첫째로, 대부분의 비행기에서 full flaps는 landing gear보다 더 많은 항력을 생산한다. 둘째로, flap을 올리면 비행기가 안착하려는 경향을 보인다. 따라서 의도치 않은 순간적 착지를 대비하기 위해 landing gear가 내려져 있어야 한다.
많은 다발 비행기들이 landing gear retraction speed를 가지고 있으며이는 landing gear extension speed보다 훨씬 낮다. 복행 도중 retraction speed가 초과되지 않도록 주의해야 한다. 착륙을 위해 공항에 되돌아오기로 결정하였다면 before landing checklist를 전부 다시 완료해야 한다. 조종사의 습관 패턴을 방해하는 일들(예를 들어 복행)은 이후 gear up landing으로 이어질 수 있다.
앞서 설명한 논의에서는 복행이 정상 접근 속도나 그 이상의 속도에서 시작되었다 가정한다. 만약 복행이 낮은 속도에서 시작되었다면 기동 도중 적절한 속도를 유지하기 위해 상승 자세로 향하는 자세 조절이 완화되어야 한다. 이러한 경우는 보통 landing round out 도중 복행이 시작되거나, bad bounce로부터 회복하는 과정에서 복행이 시작되거나, 의도치 않게 실속에 접근해서 복행이 시작될 때 적용된다. 비행기제어를 유지하고 충분한 비행 속도를 얻는 것이 항상 최우선이다. 항공기가 상승 속도까지 가속하기 위해 잠깐 수평 비행을 해야 할 수도 있다.
OEI operations에는 성능(performance)과 제어(control)라는 두 가지 주요 고려 사항이 있다.다발 비행기 조종사는 sideslip 없이 비행하는 훈련을 통해 비행기가 blue radial indicated airspeed에서 최대 상승 성능으로 운영되는 방법을 배운다.또한 조종사는 VMCdemonstration을 통해 red radial indicated airspeed와 연관된 방향 제어 상실을 인지 및 회복하는 방법을 배운다. VMCdemonstration의 목적은 성능이 아니므로 기동 도중 sideslip이 발생한다. 방향 제어 상실과 최대 OEI 상승 성능에 대한 자세한 설명은 다음과 같다.
Derivation of VMC
VMC는 제조업체가 설정한 속도로 AFM/POH에 게재되며 대부분의 속도계에 red radial line으로 표시된다. 똑똑한 다발 비행기 조종사는 VMC가 모든 조건에 대해 고정된 속도가 아니라는 것을 안다. VMC는 항공기 증명 도중 매우 특정한 상황에 대해 결정된 고정된 속도이다. 실제로 VMC는 아래에 설명된 다양한 요소들에 의해 달라진다. 조종사의 기술과 상황에 따라서 VMC가 AFM/POH에 게재된 값보다 더 낮거나 높을 수 있다.
과거에는 VMC의 정의가 다음과 같았다:critical engine이 작동하지 않는 상태에서 비행기의 제어가 유지될 수 있는, 그리고 5도 이하의 bank angle에서 감속 없이 직진 비행을 유지할 수 있는 sea level calibrated airspeed.
앞서 설명한 내용은 동적(dynamic) 조건에서 VMC를결정하는 것과 관련된다. 이러한 기술은 항공기 형식 증명 도중 고도로 숙련된 테스트 파일럿이 사용하는 방식이다. 형식 증명 이외의 상황에서 이 기술을 시도하는 것은 안전하지 않다.
항공기 형식 증명 도중 정적(static) 조건에서 VMC를 결정하기도 한다. 동적 조건과 정적 조건에서 측정된 VMC 값이 다르면 둘 중 높은 값이 VMC로 게재된다. 정적 조건에서는 단순히 VMC속도에서 5도 이하의 bank angle로 직진 비행을 유지할 수 있는지 평가한다. 이는 다발 한정 실기 시험에서의 VMCdemonstration과 더 유사하다.
AFM/POH에 게재된 VMC는 critical engine이 작동하지 않는 상태에 대해 결정된다. critical engine(임계 엔진)이란 엔진 고장 발생 시 방향 제어에 가장 악영향을 미치는 엔진을 의미한다. 조종석에서 바라보았을 때 양 쪽 엔진이 시계 방향으로 회전한다면 critical engine은 좌측 엔진이 될 것이다.
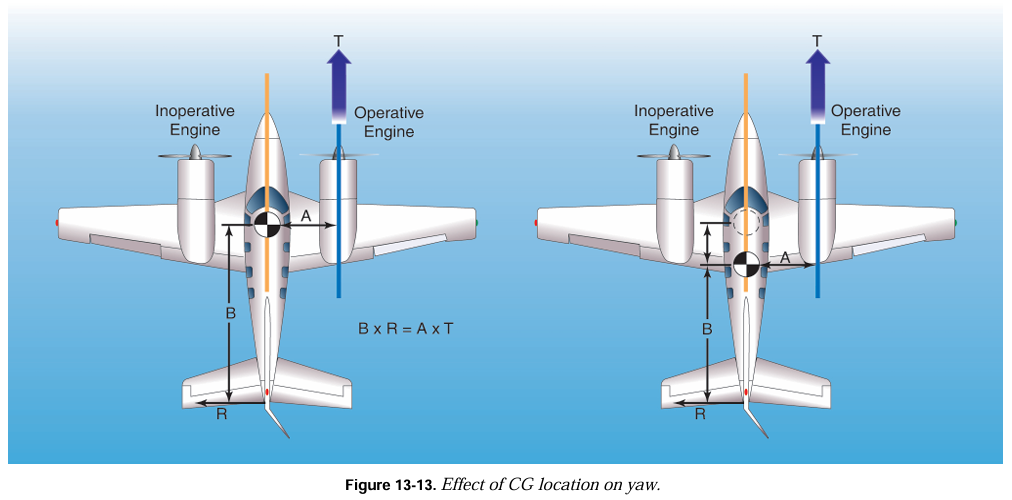
다발 비행기는 P-factor의 영향을 받는다. 비행기가 양의 받음각 상태에 있다면 각 엔진의 하강하는 프로펠러는 상승하는 프로펠러보다 더 많은 추력을 생산할 것이다. 또한 우측 엔진의 하강하는 프로펠러는 좌측 엔진의 하강하는 프로펠러보다 무게 중심에서 더 멀리 떨어져 있으며 따라서 더 긴 moment arm을 가진다. 결과적으로 좌측 엔진이 고장 나면 우측 엔진이 남은 추력을 발생시키므로 비대칭 추력(adverse yaw)이 최대로 발생한다. [그림 13-12]
많은 다발 비행기가 counter-rotating right engine으로 설계되었다. 이 설계에서는 어느 쪽 엔진이 작동하지 않든 비대칭 추력의 크기가 동일하다. 더 중요한 엔진(critical engine)은 없으며어느 쪽 엔진으로도VMCdemonstration을 수행할 수 있다.
(출처: Wikipedia)
다음 항목들은 과거 14 CFR part 23, section 23.149에 따라 증명된 다발 비행기들의 VMC속도에 영향을 미치는 여러 가지 요인을 설명한다. 다음 항목들은 제조업체가 게재한 속도가 결정되는데 사용된 조건들도 설명한다. 과거에는 14 CFR part 23, section 23.149에 설명된 다음 조건에 따라 dynamic VMC가 결정되었다.
∙ Maximum available takeoff power initially on each engine(section 23.149(b)(1)). 작동 중인 엔진의 출력이 높아질수록 VMC가 증가한다. 자연 흡기식 엔진의 경우에는 해수면에서 이륙 출력을 사용할 때 VMC가 가장 높으며 고도가 높아질수록 감소한다. turbocharged engine에서는 이륙 출력이 엔진의 critical altitude(엔진이 더는 100% 출력을 유지할 수 없는 고도)까지 일정하게 유지되므로VMC도 일정하게 유지된다. critical altitude 너머에서는 자연 흡기식 엔진처럼VMC가 감소한다. 사고를 방지하기 위해 테스트 파일럿은 다양한 고도에서 VMC테스트를 수행한 후 테스트 결과들을 하나의 해수면 값으로 추정한다.
∙ All propeller controls in the recommended takeoff position throughout VMC determination(section 23.149(b)(5)). 작동하지 않는 엔진의 항력이 증가할수록 VMC가 증가한다. 따라서 critical engine의 프로펠러가 low pitch · high rpm으로windmilling 할 때 VMC가 최대이다. VMC는 보통 critical engine의 프로펠러가takeoff position에서 windmilling 할 때 결정된다(단, 엔진이 autofeather system을 장착한 경우 제외).
∙ Most unfavorable weight and center-of-gravity position(section 23.149(b)). 무게중심(CG)이 뒤로 이동할수록 VMC가 증가한다. CG가 뒤로 이동할수록 rudder의 moment arm이 감소하므로 rudder의 효율 또한 감소한다. 전형적인 light twin에서 aft-most CG limit는 가장 좋지 않은 CG 위치이다. 과거에 14 CFR part 23은 가장 좋지 않은 무게 조건에서 VMC가 결정되도록 규정하였다. CAR 3이나 초기 14 CFR part 23에 따라 증명된 다발 비행기에서는 VMC가 결정되는 무게가 명시되지 않는다. 무게가 감소할수록 VMC가 증가한다. [그림 13-13]
∙ Landing gear retracted(section 23.149(b)(4)). landing gear를 올리면 VMC가 증가한다. landing gear는 방향 제어에 도움을 주어서 VMC를 감소시키는 경향이 있다.
∙ Flaps in the takeoff position(section 23.149(b)(3)). 이는 보통 wing flaps와 cowl flaps를 포함한다. 대부분의 다발 비행기에서 이는 flaps 0°일 것이다.
∙ Airplane trimmed for takeoff(section 23.149(b)(2)).
∙ Airplane airborne and the ground effect negligible(section 23.149(b)).
∙ Maximum of 5˚ angle of bank(section 23.149(a)). VMC는 bank angle에 매우 민감하다. 항공기 형식 증명 도중 비현실적으로 낮은 VMC속도가 게재되는 것을 방지하기 위해 제조업체는 작동 중인 엔진 쪽으로 최대 5˚의 bank angle을 사용할 수 있다. sideslip을 사용하는 대신 bank에서 발생하는 양력의 수평 성분으로 rudder의 횡력(side force)과 균형을 맞춘다. sideslip은 더 많은 rudder를 필요로 하며 이는 결국 VMC를 증가시킨다. 높은 bank angle을 사용하면 필요한 rudder량이 감소하므로 bank angle은 VMC를 낮추는데 있어 제조업체에 유리하게 작용한다. 허나 bank angle이 커지면 양력의 수직 성분을 유지하기 위해 받음각이 커져야 하고 sideslip도 커지므로 이러한 방법은 안전하지 못하다.
bank angle이 감소하면 VMC가 증가한다. 실제로 VMC는 5도의bank angle에서 1도가 감소할 때마다 3노트 이상씩 증가할 수 있다. VMC는 최대 5도의 bank angle에서 결정되었으므로 만약 날개가 수평으로 유지되면 AFM/POH에 게재된 VMC보다 대략 20노트 높은 속도에서 방향 제어 상실을 경험할 수 있다.
최대 5도의 bank angle은 항공기 형식 증명에 있어 제조업체에 부과된 과거의 제한 사항이다. 5도의 bank가 본질적으로 zero sideslip이나 best single-engine climb performance를 보장하지는 않는다. zero sideslip(즉, best single-engine climb performance)은 5˚ 미만의 bank angle에서 발생할 수 있다. VMC는 특정 상황에서 방향 제어를 위한 최소 속도와 관련되어 있지 상승 성능을 위한 최적의 비행기 자세나 외장과는 관련이 없다.
동적 조건에서 VMC를 결정할 때 테스트 파일럿은mixture control을 통해 critical engine을 끄며매 시도마다 속도를 조금씩 줄인다. VMC란critical engine을 껐을 때 초기 heading으로부터 20도 이내로 방향 제어를 유지할 수 있는 최소 속도를 의미한다. 테스트 도중에는 상승 각도가 높은 상태에서 한 쪽 엔진을 꺼서 초기 속도를 다시 얻기 위해 pitch를 빠르게 낮춰야 했다. 다발 비행기로 전환하는 조종사는 VMCdemonstration을 위해 높은 출력 상태에서 엔진을 끄거나VSSE보다 낮은 속도에서 의도적으로 엔진을 끄면 방향 제어 상실과 사고의 가능성이 높아진다는 것을 이해해야 한다.
VMCDemo
비행 훈련 도중 실제로 VMC를 시연및 회복하는 것은 정적 조건에서 VMC를결정하는 방법과 유사하다. 지상 충돌의 위험을 방지하기 위해 조종사는 최소 3,000ft AGL 이상에서 기동이 완료될 수 있는 고도를 선택한다. 다음 설명은 좌측 엔진이 critical engine인 non-counter-rotating engines를 가정한다.
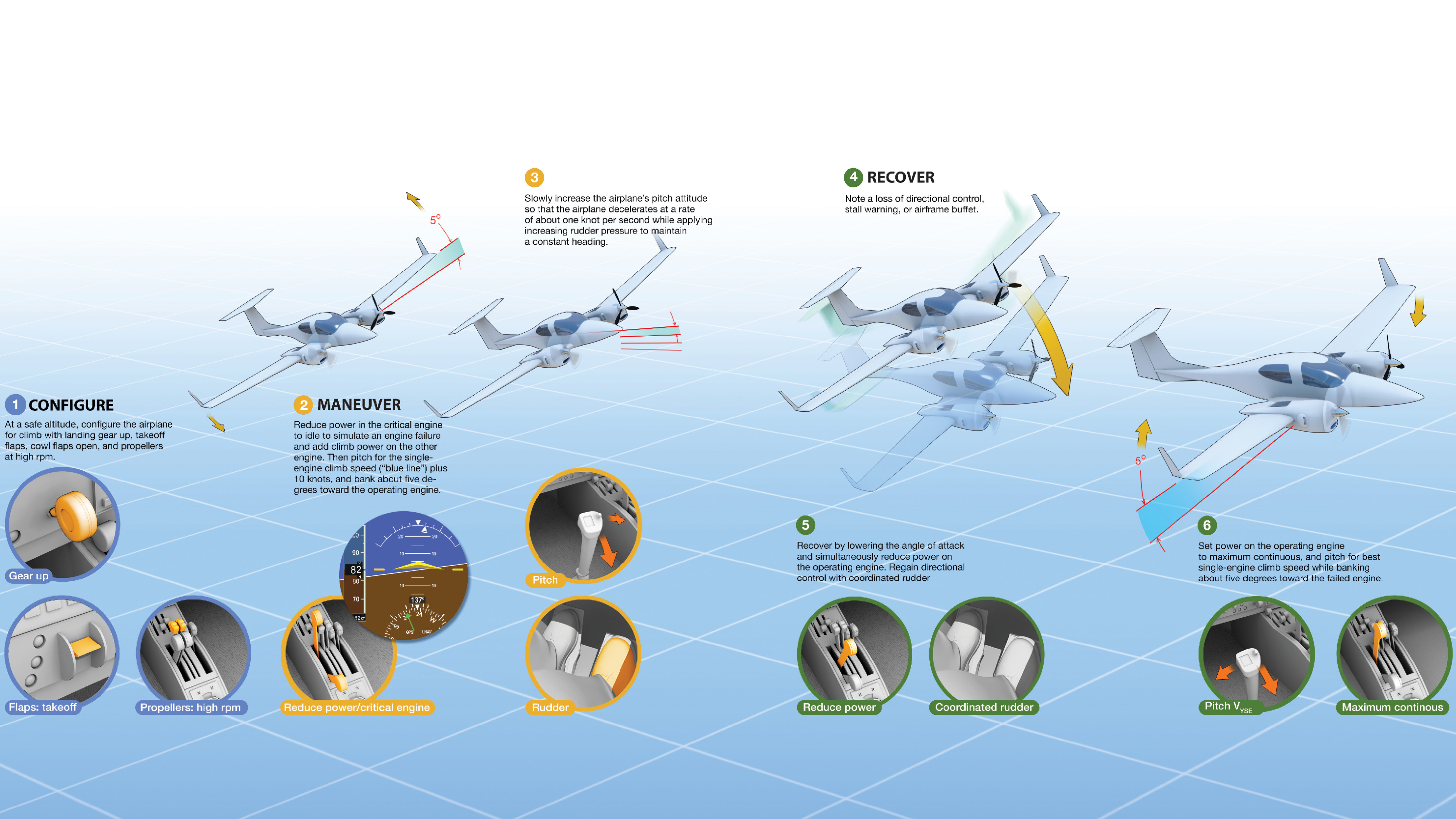
landing gear는 올라가 있고 flaps는 takeoff position인 상태에서 대략 VSSE나 VYSE 중 더 높은 것보다 10노트 높은 속도로 감속하고 비행기를 takeoff로 trim 한다. 남은 기동 도중 trim 세팅은 변하지 않는다. 조종사는 entry heading을 선택하고 양 쪽 propeller controls를 high rpm으로 설정한다. 좌측 엔진의 출력을 idle로 줄이고 우측 엔진의 출력을 takeoff setting으로 증가시킨다. throttle이 줄여진 상태에서는landing gear warning horn이 울리므로조종사는 stall warning horn을 주의 깊게 듣거나stall warning light를 주시해야 한다. 비대칭 추력으로 인한 좌측 yawing moment와rolling moment는 주로 right rudder로 상쇄된다. 비행기 모델에 따라 최대 5도의 bank angle이 설정될 수 있다.
entry heading을 유지하는 동안 초당 1노트씩감속하도록 pitch를증가시킨다. 비행기가 감속해서 조종면 효율성이 감소하면 yawing tendency가 더 커지므로rudder를 더 가한다. 설정된 bank를 유지하기 위해 aileron 압력도 증가할 것이다. 곧 최대 right rudder와 최대 5도의 bank로는 비대칭 추력을 상쇄하지 못하는 대기속도에 도달하며 비행기가 걷잡을 수 없이 좌측으로 yaw 하기 시작할 것이다.
이 걷잡을 수 없는 yaw를 인지하거나 실속과 연관된 증상을 경험한 순간 조종사는 yaw를 멈추기 위해 즉시 작동 중인 엔진의 throttle을 줄이고 속도를 얻기 위해 pitch를 낮춘다. entry heading에서 VSSE나 VYSE 속도로 직진 비행이 이뤄지도록 회복을 수행한다. 작동 중인 엔진의 출력을 증가시키고 비행이 제어되는지 시연한 후에 비대칭 추력을 회복한다.
VMC demonstration 도중 rudder 압력이 상당히 높을 수 있다. 과거 14 CFR part 23, section 23.149(e)에 따라 형식 증명을 받을 때에는 rudder에 150파운드의 힘이 허용되었다. 허나 rudder가 움직일 수 있는 거리의 한계 때문에 150파운드의 압력이 필요한 경우는 거의 없다. 하지만 VMCdemonstration 도중 사용되는 rudder 압력은 여전히 상당하다고 느껴질 수 있다.
이 기동을 완료하는데 고도를 유지하는 기준은 없다. VMC demonstration은 성능이 아니라 조종성을 시연하는 것이다. 많은 비행기들이 VMC demonstration 도중 고도를 잃을(혹은 얻을) 것이다. 기동 도중 최소 3,000ft AGL 이상에 머무르는 것이 위험 완화에 효율적이라 간주된다.
VMCDemo Stall Avoidance
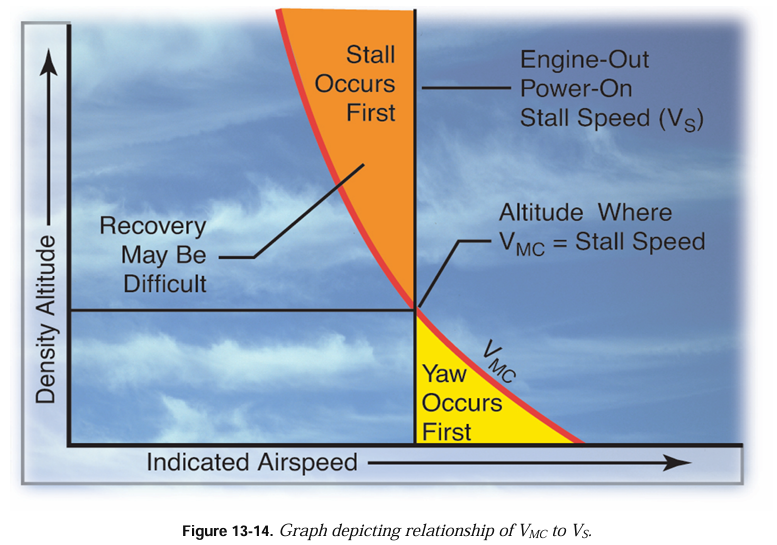
앞서 말했듯 자연 흡기 엔진의 VMC는 고도에 반비례한다. 허나 실속 속도(VS)는 동일하게 유지된다. AFM/POH에 게재된 VMC는 보통 VS보다 높다. 해수면에서는 보통 VMC와 VS사이에 몇 노트의 여유가 있다. 허나 고도가 높아질수록 그 여유가 감소하며특정 고도에서는 VMC와 VS가 같아진다. [그림 13-14]
비대칭 추력인 상태로 실속에 빠지면 스핀에 진입할 수 있다. 비대칭 추력으로 발생하는 yawing moment는 단발 비행기로 intentional spin 도중full rudder를 적용하였을 때 발생하는 yawing moment와 거의 차이가 없다. 허나 다발 비행기의 경우에는 rudder를 적용한 방향이 아니라 idle 엔진 쪽으로 제어가 상실된다. 다발 비행기로는 스핀 회복을 시연할 필요가 없으며 다발 비행기의 스핀 회복 특성은 보통 매우 좋지 못하다.
VMC이전에 VS를 맞이하면 강한 yawing tendency와 rolling tendency와 함께 순식간에 제어가 상실되어서 비행기가 뒤집히고 스핀에 진입할 수 있다. 따라서 VMCdemonstration 도중 impending stall의 증상(예를 들어 stall warning light/horn, airframe/elevator buffet, 혹은 조종면 효율성의 갑작스러운 상실)이 발생하면 throttle과 AOA를 줄여서 즉시 기동을 종료하고 비행기를 기동 진입속도로 되돌려야 한다. 조종실 내부의 소음으로 인해 stall warning horn 소리가 가려질 수 있음을 유의하라.
앞선 절차에 따라 VMCdemonstration을 수행하면 방향 제어 상실의 초기 단계를 알 수 있지만 실속 상황에 주의해야 한다. VMCdemonstration이 single-engine stall로 전락하지 않기 위해선 비대칭 추력 상태에서의 실속을 피해야 한다. 비대칭 추력이 높은 상태에서 VMCdemonstration이 single-engine stall로 전락하면 회복 불가능한 제어 상실 및 치명적 사고로 이어질 수 있다.
특정 밀도 고도이거나VMC가 VS이하인 경우에는 VMCdemonstration을 수행할 수 없다. 이러한 상황에서는 rudder가 움직일 수 있는 거리를 인위적으로 제한해서 VMCdemonstration을 안전하게 수행하는 훈련 기법이 있다. rudder가 움직일 수 있는 거리를 제한하는 경우에는 VS보다 대략 20노트 높은 속도가 권장된다.
rudder를 제한하는 기법은 비대칭 출력이 높은 상태에서의 실속으로 인한 스핀을 방지하며 방향 제어 상실을 시연하는데 효율적이다.
VMC demonstration을 수행하기 위해 높은 pitch 자세에서 한 쪽 엔진의 출력을 줄이면 방향 제어 상실의 위험이 크므로 이를 피한다.
OEI Climb Performance
최적의 OEI 상승 성능은 VYSE 속도에서 최대 가용 출력과 최소 항력을 통해 얻을 수 있다. flaps와 landing gear를 올리고 고장 난 엔진의 프로펠러를 feather 하였다면sideslip을 최소화 하는 것이 최대 상승 성능을 위한 핵심 요소가 된다.
sideslip은 yaw string을 통해 확인될 수 있다. yaw string은 약 18~36인치의 끈이나 실을 비행기 중심선을 따라 windshield 아랫부분이나 기수에 붙인 것이다. 다발 비행기가 삼타일치 비행을 하고 있으면 상대풍으로 인해 string이 비행기의 세로축과 정렬되며 windshield의 중앙에 똑바로 위치하게 된다. 이것이 zero sideslip이다. slips와 skids를 수행하면 상대풍의 위치를 선명하게 확인할 수 있다. OEI 비행 도중에도 aileron과 rudder가 특정하게 조합되면zero sideslip이 만들어진다. 이러한 기동을 시도할 때에는 충분한 고도, 속도, 그리고 주의를 유지해야 한다.
단발 비행기든 다발 비행기든 turn and bank instrument의 ball이 중앙에 있을 때 sideslip이 없어진다. 이러한 상태가 zero sideslip이며 비행기 측면으로 부는 상대풍이 가장 적고그 결과로 항력이 최소이다. 조종사는 이를 coordinated flight이라 부른다.
다발 비행기의 한 쪽 엔진이 작동하지 않을 때에는 비대칭 추력으로 인해 ball이 더는 zero sideslip을 나타내지 않는다. 이제zero sideslip을 직접 지시하는 조종실 계기는 없다. 만약 yaw string이 없다면 조종사는 특정 bank angle과 ball 위치로 비행기를 배치해야 한다. one engine inoperative에 대한 AFM/POH의 성능 차트는 zero sideslip을 기준으로 하므로 차트의 OEI 성능을 얻기 위해선 이 기술을 사용해야 한다. 고장 난 엔진의 비대칭 추력을 상쇄하는데 사용될 수 있는 조종 입력에는 두 가지가 있다:
1. rudder의 yaw
2. aileron의 bank를 통해 발생한 양력의 수평성분
rudder나 aileron을 개별적으로 사용하는 것은 옳지 않다. rudder와 aileron을 적절히 조합해서 사용하면 zero sideslip과 최대 상승 성능이 만들어진다.
항공기 조종 입력에 대한 세 가지 시나리오가 아래에 나와 있다. 첫 번째 시나리오와 두 번째 시나리오는 올바르지 않으며 제어 상실의 위험을 증가시킬 수 있다. 이들은 최대 상승 성능을 위해 zero sideslip을 사용하는 이유를 설명하기 위해 제시되었다.
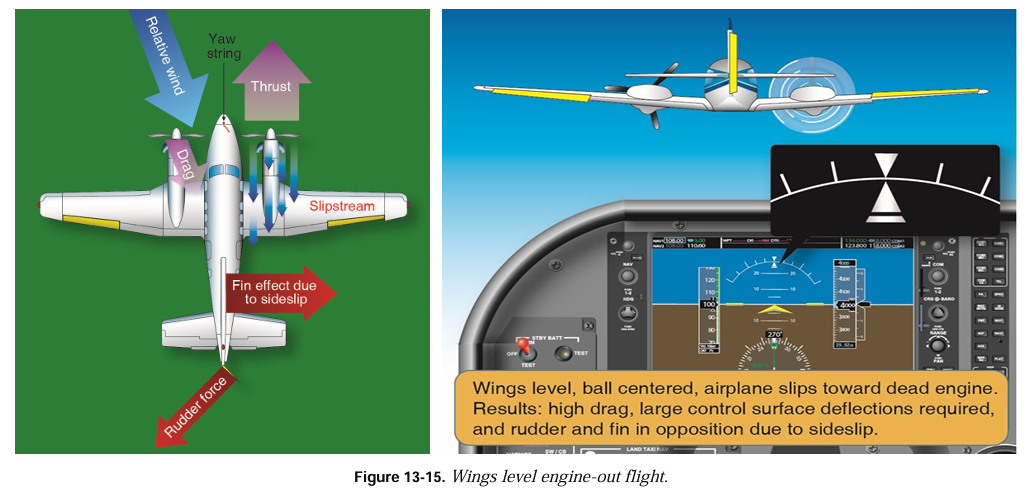
1. 날개 수평과 ball 중앙이 유지되도록 engine inoperative flight를 수행하면 작동 중인 엔진 쪽으로 rudder를 많이 적용해야 한다. [그림 13-15] 이로 인해 작동하지 않는 엔진 쪽으로 moderate sideslip이 발생한다. moderate sideslip으로 인해 상승 성능이 감소한다. 날개가 수평이 되면 rudder를 도와 비대칭 추력을 방지할 양력의 수평 요소가 없으므로 VMC가 AFM/POH에 게재된 값보다 훨씬 높아진다.
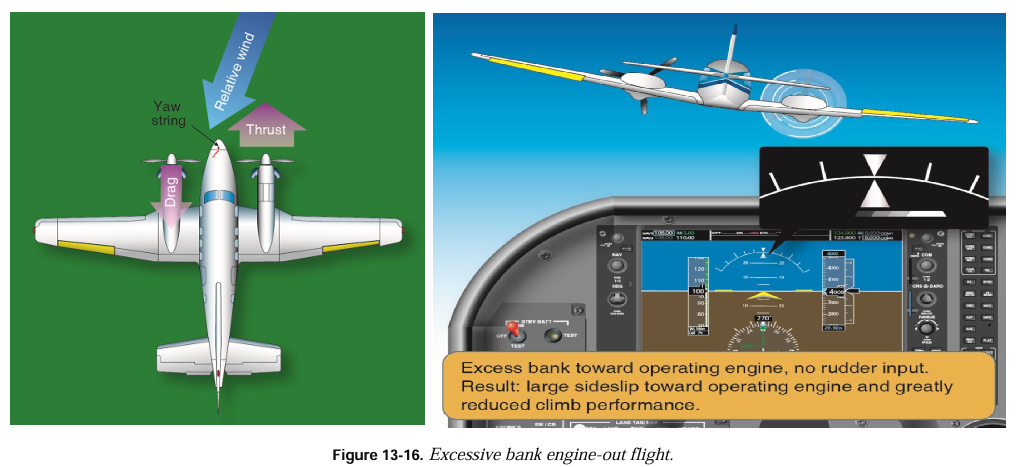
2. ailerons만으로 engine inoperative flight를 수행하면 작동 중인 엔진 쪽으로 8~10도 bank angle을 적용해야 한다. [그림 13-16] 여기서는 rudder가 적용되지 않는다 가정하므로ball이 작동 중인 엔진 쪽으로 멀리 이동한다. 이는 작동 중인 엔진 쪽으로 large sideslip을 발생시켜서 상승 성능을 상당히 감소시킨다. 제어 상실의 위험이 커지므로 교관은 이를 시연해서는 안 된다.
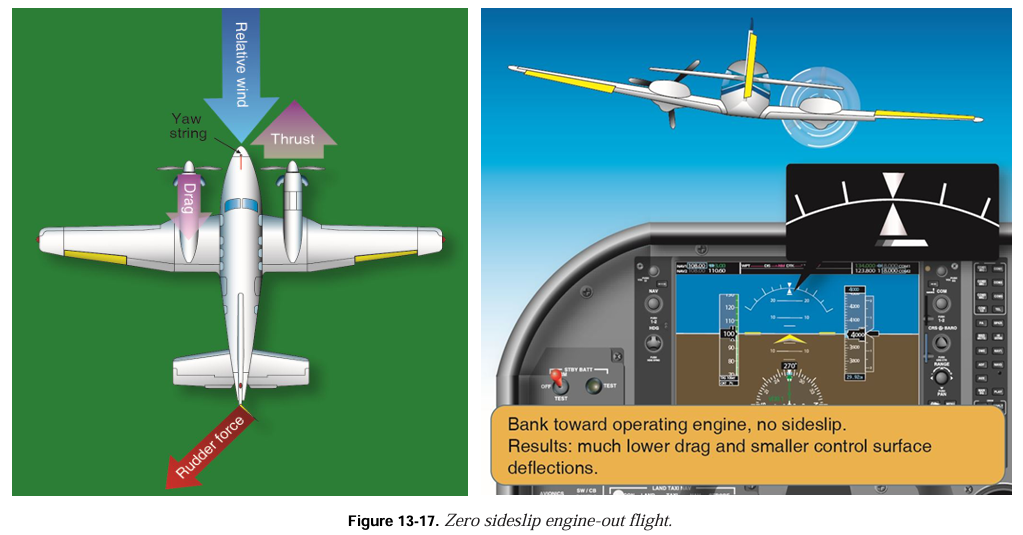
3. rudder와 ailerons를 적절한 조합해서 사용하면 작동 중인 엔진 쪽으로 약 2도의 bank가 발생한다. ball은 작동 중인 엔진 쪽으로 대략 1/3~1/2 정도 이동한다. 그 결과로 zero sideslip이 만들어지며 상승 성능이 최대가 된다.[그림 13-17] zero sideslip 이외의 자세에서는 항력이 증가해서 성능이 저하된다. 이러한 상황에서의 VMC는 AFM/POH에 게재된 값보다 클 것이다. 왜냐하면 항공기 형식 증명을 위한 5도의 bank 제한 사항보다 bank가 덜 사용되었기 때문이다.
bank angle과 상승 성능의 관계를 그래프로 나타내면 zero sideslip일 때 최대 상승 성능이나 최소 하강률이 발생한다. 비행기가 상승할 수 있는지의 여부는 비행기의 무게, 밀도 고도, 그리고 조종사의 기술에 달려있다. 만약 조종사가 zero bank를 사용하면(yaw를 상쇄하기 위해rudder만 사용하면) moderate sideslip으로 인해 상승 성능이 저하된다. 만약 조종사가 bank angle만을 사용하면(rudder를 사용하지 않으면) large sideslip으로 인해 상승 성능이 상당히 저하된다.
zero sideslip의 정확한 조건(bank의각도와ball의위치)은 비행기 모델에 따라, 그리고 가용한 출력과 대기속도에 따라 약간씩 달라진다. 또한 비행기가 non-counter-rotating propellers를 갖추고 있다면 고장 난 엔진에 따라zero sideslip이 약간 달라진다(이는 P-factor 때문). 앞서 설명한 zero sideslip 권장사항은 작동하지 않는 엔진이 feather 된 상태에서VYSE로 비행하는 왕복 다발 비행기에 적용된다. 직진 비행을 위한 ball 위치는 선회 비행을 위한 ball 위치와 동일하다.
zero sideslip을 위한 실제 bank 각도는 항공기에 따라 1.5 ~2.5도까지 다양하다. ball의 위치는 계기 중앙으로부터 작동 엔진 쪽으로 ball 폭의 1/3~1/2까지 변화한다.
특정 비행 훈련 시나리오 도중 조종사와 교관은 propeller feathering을 시뮬레이션 한다. zero thrust란 회전하는 프로펠러에서 발생하는 항력이 feathered propeller와 같아지도록 엔진 출력을 설정하는 것이다. 엔진을 zero thrust(혹은 feathered)로 설정하고 비행기를 VYSE로 감속한 상태에서 남은 엔진으로 최대 출력 상승을 수행하면 zero sideslip 및 최대 상승 성능에 필요한 정확한 bank 각도와ball 위치를 알 수 있다. 만약 yaw string이 있다면 이는 windshield에 수직으로 정렬되어서 zero sideslip을 나타낸다. 이 zero sideslip 자세는 고장 난 엔진(non-counter-rotating propellers의 경우), 이용 가능한 출력, 대기속도, 그리고 무게에 따라 약간씩 변화하긴 하지만이러한 변화를 감지하는 것은 어렵다. 유일한 차이는 밀도 고도, 이응 가능한 출력, 그리고 무게에 따라 VYSE를 유지하는데 필요한 pitch가 달라지는 것이다.
고도와 대기속도가 낮은 상태에서(예를 들어 초기 상승 도중) OEI flight을 수행하게 되면 조종사는 세 가지 주요 사고 요인이 방지되도록 비행기를 운항해야 한다: (1) 방향 제어 상실, (2) 성능 상실, (3) 비행 속도 상실. 셋 다 생명을 위협하는 가능성을 가지고 있긴 하지만 방향 제어와 성능을 충분히 고려해서 비행기를 운항한다면 비행 속도 상실은 문제가 되지 않는다.
이륙이나 복행 도중 엔진 고장이 발생하면 가장 위험하다. 항공기는 느리고, 지면에 가까우며,landing gear와 flap가 연장되어 있을 수 있다. 고도와 시간은 매우 적다. 고장 난 엔진의 프로펠러가 feathered 되기 전까지는 windmilling으로 인해 상당한 양의 항력과 yawing tendency를 발생시킨다. 비행기의 상승 성능이 미미하거나 심지어 없을 수도 있으며 장애물이 앞에 놓여있을 수도 있다. 만일의 경우를 위한 비상 계획과 안전 브리핑은 이륙 활주가 시작되기 훨씬 전에 명확하게 이해되어야 한다. 미리 선정해둔 대기속도나 지점 이전에 엔진 고장이 발생하면 aborted takeoff를 수행한다. 미리 선정해둔대기속도나 지점 이후에 엔진 고장이 발생하였으며 gear가 올라가 있고 상승 성능이 보장된다면 이륙이 계속된다. 엔진 고장이 발생했다면 비행기의 제어를 유지하고 제조업체가 권장하는 비상 절차를 따르는 것이 가장 중요하다. 이륙 직후 한쪽 엔진이 완전히 고장나는 상황은 크게 다음 세 가지 시나리오 중 하나로 분류될 수 있다.
Landing Gear Down
landing gear를 UP position으로 설정하기 전에 엔진 고장이 발생하였다면 [그림 13-18] : 기수를 최대한 곧바르게 유지하고, 양쪽 throttles를 닫고, 적절한 대기속도를 유지하기 위해 pitch를 조절하고, 활주로에 하강한다. 정상 착륙에 집중해야 하며 비행기를 강제로 착륙시키려 시도하지 않는다. 남은 활주로에 착륙하거나 overrun을 수행한다. 갑작스러운 yaw에 조종사가 빠르게 반응하지 못하면 비행기가 활주로의 측면으로 벗어날 수도 있다. 이렇게 되면 조종사가 사용할 수 있는 실질적 선택지가 사실상 없어진다. 앞서 설명한 것처럼 flaps와landing gear를 올리고 프로펠러를 feathering 하면서 비행기를 가속하는 동안 방향 제어를 유지할 가능성은 극히 적다. single-engine-driven hydraulic pump를 갖춘 일부 비행기의 경우에는 만약 해당 엔진에 고장이 발생하면 엔진이 windmill을 하거나hand pump를 사용해야 landing gear를 올릴 수 있다. 이는 이륙 도중 사용할 수 있는 대안은 아니다.
Landing Gear Control Selected Up, Single-Engine Climb Performance Inadequate
single-engine ceiling 이상을 운영하고 있을 때 이륙 직후 엔진 고장이 발생하였다면 전방에 무엇이 있어도 착륙해야 한다. [그림 13-19] 나머지 엔진 출력을 통해 VYSE 하강 속도로 계속 나아가는 선택지도 있다(단, 공중에 더 오래 머무르기 위해 비행기의 성능을 초과하려 시도해서는 안 됨). 고도를 유지하기 위해 속도를 감소시키는 것은 거의 항상 치명적이다. 비행기를 제어 하에 착륙시키는 것이 가장 중요하다. single-engine takeoff와 관련된 가장 큰 위험은 항공기가 single-engine takeoff를 수행할 성능에 미치지 못하는 상황에서 비행을 시도하는 것이다. 이렇게 되면 사고는 불가피해진다.
분석 결과 비행기가 제어 하에 있으면 공항 이외의 지역에 착륙할 성공률이 매우 높은 것으로 나타났다. 또한 조종사가 비행기의 성능을 초과하여 비행하려 시도하면 stall spin 사고로 인해 치사율이 매우 높다는 사실도 나타났다.
이전에 언급하였듯 만약 항공기의 landing gear retraction mechanism이 특정 engine-driven pump에 의존한다면 해당 엔진이 고장 난 이후 수백 피트의 고도가 손실될 수 있다. 왜냐하면 gear를 올릴 유압을 위해 조종사가 해당 엔진을 windmills 하거나 backup pump로 직접 gear를 올려야하기 때문이다.
Landing Gear Control Selected Up, Single-Engine Climb Performance Adequate
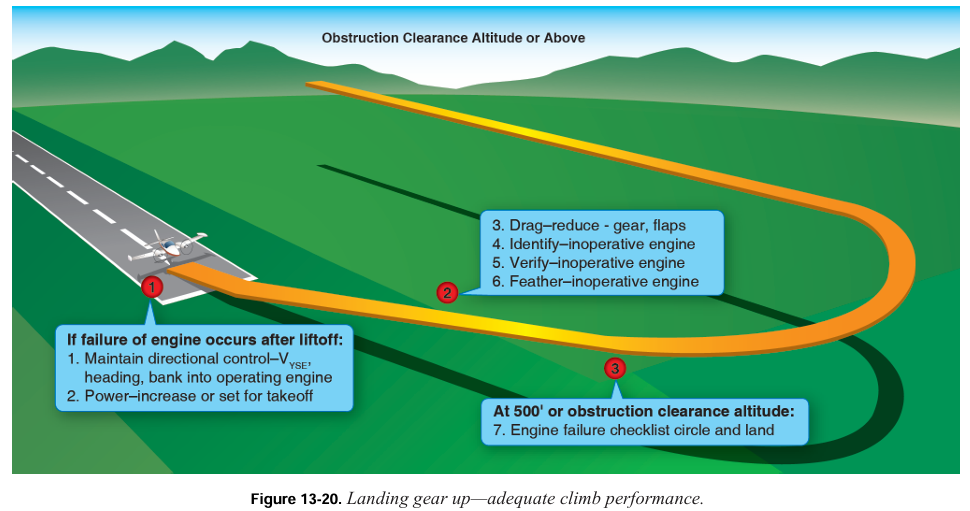
single-engine 상승률이 충분하다면 계속 비행을 진행하기 위한 절차를 따라야 한다. [그림 13-20] 고려해야 할 4 가지 요소들이 있다: control, configuration, climb, checklist.
1. Control
이륙 중 엔진 고장이 발생하였다면 첫 번째 고려사항은 항공기의 제어를 유지하는 것이다. 빠르고 적극적으로 rudder를 적용해서 방향 제어를 유지하고 yaw를 멈추는 것은 비행 안전에 중요하다. 대기속도가 VMC 너머로 유지되도록 한다. 만약 full rudder를 적용하여도 yaw가 제어되지 못한다면 작동 중인 엔진의 추력을 감소시켜야 한다. rudder보다 aileron을 먼저 적용하면 항력과 adverse yaw가 증가하며 방향 제어가 더욱 저하된다. yaw를 멈추기 위해 rudder를 적용한 후에 약간의 aileron을 통해 비행기를 작동 엔진 쪽으로 기울어지게 만든다. 이는 항공기 제어, 항력 최소화, 그리고 최대 성능을 얻는 가장 효율적인 방법이다. 조종간 압력이 높을 수 있다(특히 rudder). VYSE를 위한 pitch 자세는 VY를 위한 pitch 자세보다 낮아야 한다. yaw를 멈추고 방향 제어를 유지하기 위해 처음엔 최소 5도에서 최대 10도의 bank를 사용해야 한다. 이 초기 bank는 방향 제어가 설정될 만큼만 일시적으로 유지된다. 비록 bank angle이 대략 2도나 3도를 초과하면 상승 성능이 저하되지만 VYSE와 방향 제어를 얻고 유지하는 것이 가장 중요하다. 조종간 압력을 줄이기 위해 trim을 조정해야 한다.
2. Configuration
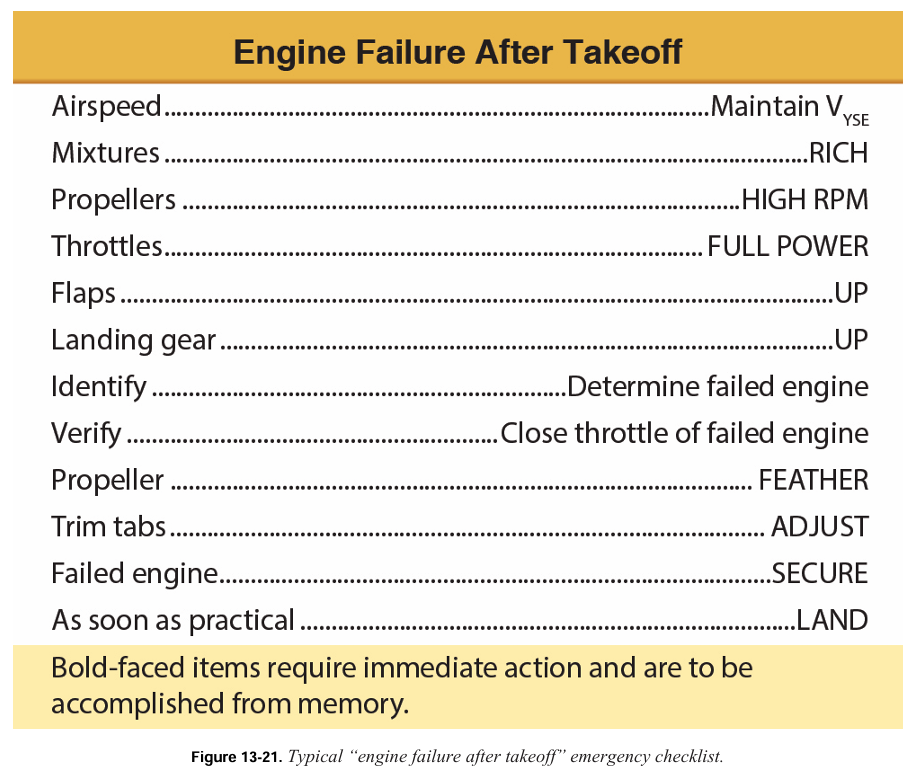
항공기를 상승 외장으로 만들기 위해 engine failure after takeoff checklist의 memory items를 즉시 수행해야 한다. [그림 13-21] 따라야 할 구체적인 절차는 해당 비행기의 AFM/POH와 체크리스트에서 확인할 수 있다. 이러한 절차는 보통 조종사에게 VYSE를유지하도록, 이륙 출력을 설정하도록, flaps와 landing gear를 올리도록, 그리고 고장 난 엔진을 identify ∙ verify ∙ feather 하도록 지시한다. (몇몇 항공기에서는 flaps 보다 landing gear를 먼저 올려야 한다.)
“identify”란 조종사가 고장 난 엔진을 식별하는 것이다. 고장 유형에 따라 엔진 계기를 통해 고장 난 엔진의 식별이 가능하거나 불가능할 수 있다. 이러한 식별은 엔진 계기보다는 주로 직진 비행을 유지하는데 필요한 조종간 입력을 통해 이루어져야 한다. “verify”란 조종사가 고장 났다고 생각되는 엔진의 throttle을 줄이는 것이다. 고장이 의심되는 엔진의 throttle을 줄였을 때 성능의 변화가 없다면 고장 난 엔진을 정확히 식별한 것이다. "feather"란 조종사가 고장 난 엔진의 propeller control을 완전히 당기는 것이다.
3. Climb
방향 제어가 설정되었고 상승 외장이 만들어졌으면 최고의 상승 성능이 만들어지는 값으로 bank angle을줄여야 한다. zero sideslip을 위한 특정 지침이 없다면 작동 엔진 쪽으로 2도의 bank를, 그리고 slip/skid indicator의 ball이 1/3~1/2만큼 이동하도록 rudder를 사용하는 것이권장된다. VYSE는 pitch 조작을 통해 유지된다. 선회 비행은 상승 성능을 감소시키므로장애물을 회피하기 위해 최소 400ft(AGL)까지는 직진 상승이나 shallow turns를 수행한 후에 공항으로 되돌아가야 한다.
4. Checklist
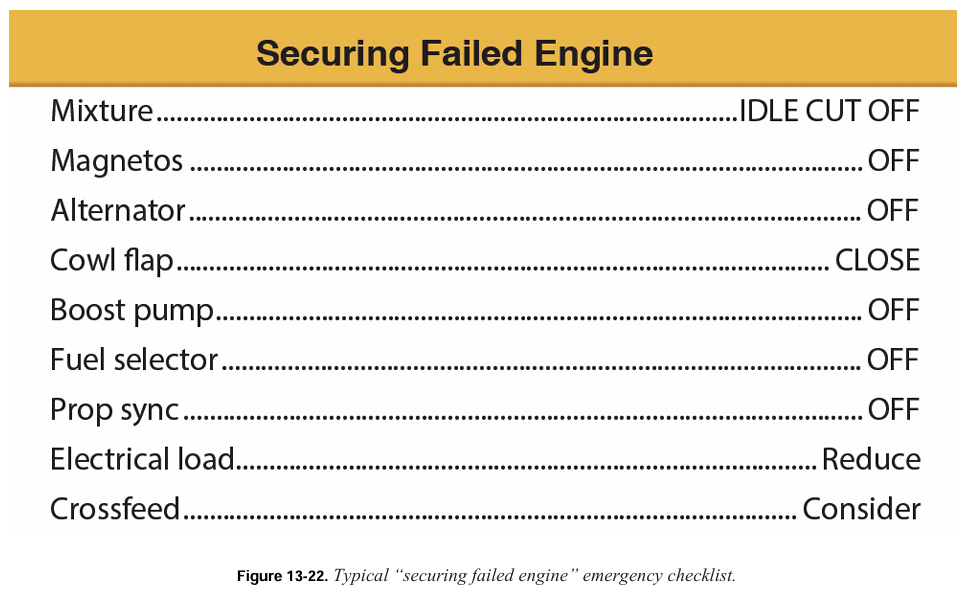
engine failure after takeoff checklist의 memory items를 수행한 후 시간이 허락하는 대로 실제 체크리스트를 검토해야 한다. 그런 다음에는 securing failed engine checklist를 수행해야 한다. [그림 13-22] 엔진 화재가 의심되지 않는 한 조종사는 남은 항목들은 천천히 신중하게 수행해야 한다. 남아있는 체크리스트를 수행하기 위해 비행기 제어가 희생되어서는 절대 안 된다. 우선순위 항목들은 이미 memory items를 통해 수행되었다.
이러한 항목들이 수행되지 않는다 해도 비행기 상승 성능에는 악영향을 미치지 않는다(단, 고장 난 엔진의cowl flap을 닫는 것 제외). 절차를 급하게 수행하면 잘못된 스위치를 작동시킬 가능성이 분명히 있다. 조종사는 비행기를 조종하는 것과 최대 성능을 끌어내는 것에 집중해야 한다. ATC 시설을 이용할 수 있다면 비상 상황을 선포해야 한다.
engine failure after takeoff checklist의 memory items가 비행기의 현재 외장과 겹칠 수도 있다. 예를 들어 세 번째 이륙 시나리오에서 gear와 flaps가 이미 올라가 있다고 가정하였으나 memory items에gear와 flaps가 포함되어 있다. 이는 실수가 아니다. memory items의 목적은 적절한 조치를 취하거나 조건이 만족되는지 확인하는 것이다. 각 항목에 대한 조치가 항상 필요한 것은 아니다. 또한 memory items는 여러 상황에 적용된다. 예를 들어 복행 도중 엔진 고장이 발생하였다면 landing gear와 flaps가 연장되어 있을 가능성이 높다.
앞서 설명한 세 가지 이륙 시나리오는 착륙을 수행할지 비행을 속행할지 결정하는데 있어 landing gear를 주요 요소로 포함한다. 예를 들어 landing gear가 DOWN position에 있는 상태로 계속해서 이륙 및 상승을 하는 것은 권장되지 않는다. 허나 그렇다 해서 정상 이륙 도중 비행기가 지면을 떠나는 순간 landing gear를 올리는 것이 정당화되지는 않는다. 사용 가능한 활주로나 착륙 가능한 overrun이 있는 한 landing gear를 내려두어야 한다. 이륙을 위해 wing flaps를 사용하였다면 사실상 flaps를 올리기 전까지는 single-engine으로 상승할 가능성이 없다.
조종사가 엔진 고장 시나리오를 다루는데 있어 유용하게 사용할 수 있는 두 가지 구절이 있다. 첫째로 “dead-foot-dead engine”은 고장 난 엔진의 식별을 돕는데 사용된다. 고장 유형에 따라 엔진 계기를 통해선 고장 난 엔진을 적시에 식별할 수 없다. 허나 방향 제어를 유지하기 위해 rudder 압력은 엔진이 작동하는 쪽(좌측이나 우측)으로 가해진다. 따라서 “dead foot”은 “dead engine”과 같은 방향에 있다. 이 구절의 다른 말로 “idle foot-idle engine”과 “working foot-working engine”이 있다.
두 번째 구절은 상승 성능과 관련이 있다. “raise the dead”라는 구절은 작동하는 엔진 쪽으로 약 2도의 shallow bank를 가해 최대 상승 성능을 얻는다는 뜻이다. 따라서“dead” engine이 약간의 bank로 상승되어야 한다.
모든 엔진 고장 상황이 완전한 출력 상실로 이어지는 것은 아니다. 고장이 발생한 엔진의 throttle을 당겼을 때 성능 손실이 발생하였다면 일부 출력은 아직 사용할 수 있는 것이다. 이 경우 조종사는 비행기가 single-engine flight에 적합한 안전 고도 및 대기속도에 도달할 때까지 엔진을 계속 작동시키는 것을 고려할 수 있다. 특정 상황에서는고장 난 엔진을 정지시키는 것이 엔진의 추가 손상을 방지할 수 있긴 하지만 여전히 일부 출력을 생산할 수 있는 엔진을 정지시키면 사고의 위험이 높아질 수 있다.
지면으로부터 훨씬 높은 고도에서 발생한 엔진 고장은 낮은 속도 및 고도에서 발생한 엔진 고장과는 다르게 다루어진다. 순항 속도는 더 나은 항공기 제어와 고도 확보를 가능하게 하며 이는 고장의 진단 및 해결책을 위한 시간을 제공할 수 있다. 허나 비행기 제어를 유지하는 것이 여전히 가장 중요하다. 엔진 문제에 지나치게 집중한 나머지 비행기 제어가 소홀해져서 사고로 이어진 사례가 있다.
모든 엔진 고장이 본질적으로 치명적인(catastrophic) 것은 아니다(catastrophic이란 엔진에 손상을 주는, 그리고 더 이상의 엔진 운영을 불가능하게 만드는 중대한 기계적 결함을 말한다). 연료 고갈로 인해 출력 손실이 발생하는 경우가 많으며 이 경우 다른 연료 탱크를 선택하면 출력이 회복될 수 있다. 계기와 스위치를 질서 있게 점검하면 문제를 발견할 수도 있다. carburetor heat이나 alternate air를 작동시킬 수 있다. 고장이 발생한 엔진이 하나의 magneto에서, 혹은 낮은 출력 세팅에서 부드럽게 작동할 수도 있다. mixture를 변화시키는 것이 도움이 될 수도 있다. 만약 fuel vapor가 의심된다면 연료의 흐름 변화와 압력 변화를 없애기 위해 fuel boost pump를 작동시킬 수 있다.
precautionary shutdown을 통해 고장 난 엔진을 보호하려는 것이 조종사들의 자연스러운 바람이긴 하지만 만약 더 안전한 비행을 위해 해당 엔진이 필요할 가능성이 조금이라도 있다면 엔진을 계속 작동시켜야 한다. 허나 심한 진동, 연기, 페인트의 물집, 혹은 큰 오일 자국을 동반하는 치명적 고장은 심각한 상황을 나타낸다. 고장이 발생한 엔진을 feather 시키고securing failed engine checklist를 수행해야 한다. 조종사는 가장 가까운 적절한 공항으로 우회해야 하며 우선순위를 위해 ATC에 비상 상황을 선언해야 한다.
fuel crossfeed란 비행기의 한 쪽 연료 탱크에서 반대 쪽 엔진으로 연료를 이송하는 방법이다. crossfeed는 single-engine operation이 길어질 때 사용된다. 만약 적절한 공항이 가까이에 있다면 crossfeed를 고려하지 않아도 된다. 만약 적절한 공항이 가까이에 없어서 single-engine operation이 길어진다면crossfeed를 사용할 수 있다. 또한 조종사는 crossfeed를 통해 연료 소모량을 조절해서 날개의 무게 균형을 맞출 수도 있다.
crossfeed에 대한 AFM/POH 절차들은 서로 다르다. crossfeed를 사용하려면 연료 시스템에 대한 지식이 필수적이다. crossfeed를 위한 fuel selector position과 fuel boost pump의 사용법은 다발 비행기들 간에 서로 다르다. 착륙하기 전에는 crossfeed가 종료되어야 하며 작동 중인 엔진은 다시 해당 엔진의 main tank로부터 연료를 공급받아야 한다.
만약 single-engine absolute ceiling보다 높은 고도에서 엔진 고장이 발생하였다면 비행기는 점점 고도를 잃는다. 조종사는 고도 손실률을 최소화하기 위해 VYSE를 유지해야 한다. 이러한 고도 손실률은 엔진 고장이 발생한 직후에 가장 심하고 single-engine ceiling에 가까워질수록 줄어든다. 엔진 및 프로펠러의 마모, 난기류, 그리고 조종사의 기술에 의해 비행기가 single-engine ceiling에서 고도를 유지하지 못할 수도 있다. 허나 이후의 침하율은 그리 크지 않을 것이다.
하강 출력이나 그 외 낮은 출력 상태에서 엔진 고장이 발생하면 조종사가 고장을 인지하기 어려울 수 있다. 급격한 yaw와 성능 손실이 없다. 아주 낮은 출력 세팅에서는 심지어 조종사가 고장을 인지하지 못할 수도 있다. 만약 고장이 의심된다면 조종사는 양 쪽 엔진의 mixtures, propellers, 그리고 throttles를 상당히 전진시켜서(필요하다면 takeoff settings까지 전진시켜서) 고장 난 엔진을 식별해야 한다. 작동 중인 엔진의 출력은 나중에 언제든지 줄일 수 있다.
OEI 상태로 접근 및 착륙을 수행하는 방법은 사실상 two-engine approach and landing과 동일하다. two-engine approach와 비슷한 고도, 대기속도, 그리고 key positions로 장주 패턴을 비행해야 한다. 다만 사용 가능한 출력이 감소하였으며 남아있는 추력은 비대칭이다. 작동하는 엔진에 정상 출력 설정보다 높은 출력 설정을 적용해야 한다.
충분한 대기속도와 성능이 존재한다면 downwind leg에서 landing gear를 내릴 수 있다. 만약 landing gear를 내렸다면 의도하는 착륙 지점에 abeam 되기 전에 landing gear가 내려져 있는지 확인해야 한다. 또한 성능이 허용된다면 downwind leg에서 flaps를 initial setting(일반적으로 10도)으로 연장하고 패턴 고도로부터 하강을 시작할 수 있다. 대기속도가 VYSE보다 낮아서는 안 된다. 장주 패턴의 방향(즉, 선회 방향)은 비행기의 조종성과 성능이 고려되는 한 중요하지 않다. 고장 난 엔진 쪽으로 선회를 수행하는 것은 전혀 문제가 되지 않는다.
성능이 충분하다면 base leg에서 flaps를 intermediate setting(일반적으로 25도)으로 연장할 수 있다. 감속이나 높은 침하율을 통해 성능이 불충분한 것을 확인하였다면 활주로에 더 근접하기 전까지는 flaps를 연장하지 않는다. VYSE는 여전히 유지되어야 할 최소 속도이다.
final approach 도중에는 보통 3도의 glidepath가 설정되어야 한다. VASI나 그 외의 vertical path lighting aids를 사용할 수 있다면 이를 사용해야 한다. 약간 가파른 접근은 용인될 수 있다. 허나 긴, 평평한, 낮은 접근을 피해야 한다. 크고 갑작스러운 출력 증가/감소를 피해야 한다. 착륙이 보장되기 전까지는 VYSE를 유지하다가 이후 1.3VS0나AFM/POH의 권장 속도로 감속한다. 착륙이 보장된 후에 final flap setting이 설정될 수도 있고 partial flaps로 내릴 수도 있다.
비행기는 접근 및 착륙 내내 trim이 되어있어야 한다. 허나 착지직전에 엔진의 출력을 idle로 줄여줌에 따라 rudder trim이 변화하므로 조종사는 이를 대비하고 있어야 한다. 한 쪽 프로펠러만 windmilling을 하고 있으므로 항력이 적으며따라서 비행기는 two-engine approach보다 더 floating을 하려는 경향을 보인다. 따라서 정교한 속도 제어가 필수적이다(특히 착륙이 짧은, 젖은, 그리고/혹은 미끄러운 표면에서 이루어지는 경우).
일부 조종사들은 final에서 rudder trim을 neutral로 리셋하고 남은 접근 동안 rudder 압력을 직접 유지해서 yaw를 상쇄한다. 이는 착륙을 위한 round out 도중 throttle을 닫을 때 지면 근처에서 rudder trim이 변화하는 것을 방지한다. 이 기법은 final approach 도중 rudder trim을 손으로 더듬어서 neutral로 조작하는필요성을 없애준다. AFM/POH의 권장사항이나 개인이 선호하는 방식을 사용한다.
final approach에서single-engine go-around가 불가능할 수도 있다. single-engine approach 도중 비행기가 landing gear와 flaps가 연장된 상태로 final approach에 진입하였다면 사실상 의도하는 활주로, 다른 활주로, 유도로, 혹은 잔디밭에 착륙할 수밖에 없다. 대부분의 light-twins는 landing gear와 flaps가 연장된 상태에서 하나의 엔진만으로 상승할 수 없다. VYSE를 유지하고 landing gear와 flaps를 올리는 동안 상당한 고도가 손실된다. 500ft 이상이 손실되는 것이 일반적이다. 만약 landing gear를 내리기 위해 대체 수단을 사용하였다면 landing gear를 올리는 것이 불가능할 수 있으며 사실상 상승 성능이 거의 없어지게 된다.
교관과 학생이 다음 요소들을 고려하면 다발 비행기 비행 훈련이 안전하게 이루어질 수 있다.
∙ 탑승자들은 비행을 시작하기 전에 목표, 기동, 예상되는 학생의 행동, 그리고 완료 기준에 대한 사전 브리핑을 수행해야 한다.
∙ simulated emergencies가 어떻게 시작될 것이며학생이 어떤 조치를 취해야 하는지 명확히 이해해야 한다.
비상 절차의 소개, 연습, 그리고 테스트는 항상 신중을 요하는 주제이다. 충분한 사전 브리핑이 없는 상태에서 다발 비행기 학생이 갑작스럽게 비상 상황을 직면하면 위험한 상황으로 이어질 수 있다.예를 들어 simulated engine failures를 부주의하게 다루면 매우 빠르게 실제 비상 상황이나 비행기 사고로 이어질 수 있다. 비상 상황을 대비한 훈련 도중 발생한 stall-spin 사고의 수는 실제 비상 상황 도중 발생한 stall-spin 사고의 수와 맞먹는다. 훈련 도중 발생하는 위험은 보통 브리핑을 통해 완화된다. 훈련 목적을 위해 circuit breakers를 뽑는 것은 권장되지 않으며이는 이후 gear up landing으로 이어질 수 있다.
비행기가 지상에 정지한 상태로 있을 때 많은 정상, 비정상, 그리고 비상 절차들을소개 및 연습할 수 있다. 이런 점에 있어서 비행기는 procedures trainer로 사용된다. 이러한 훈련의 가치는 상당할 수 있다. 실제 학습이 이루어지기 위해 엔진이 작동 중일 필요는 없다. 훈련이 완료되면 스위치를 올바른 position으로 되돌리는데 주의해야 한다.
checklist를 효과적으로 사용하지 않는 조종사는 상당한 불이익을 받을 것이다. checklist를 사용하는 것은 비행기의 안전한 운항을 위해 필수적이며 checklist 없이 비행하는 것은 위험하다. 제조업체의 checklist나 특정 모델에 대한 제조업체의 절차를 준수하는 aftermarket checklist가 사용될 수 있다. checklist와 AFM/POH 사이에 절차상 일치하지 않는 부분이 있다면 항상 AFM/POH가 우선된다.
즉각적 조치를 필요로 하는 특정 항목들(예를 들어 비행 중요 단계[critical phase of flight]에서 엔진 고장이 발생하였을 때 수행해야 하는 항목)은 기억해두어야 한다. 이러한 항목들을 완료한 후에 업무량이 허용한다면 수행한 조치를 checklist와 비교할 수 있다.
※ "비행중요단계(Critical Phases of Flight)"라 함은 순항비행을 제외한 지상활주, 이륙 및 착륙을 포함한 고도 1만피트 이하에서 운항하는 모든 비행을 말한다(출처: 고정익항공기를 위한 운항기술기준 [시행 2024.12.18])
교관은 이륙 활주 도중 mixture control을 통해 simulated engine failures를 수행할 수 있다. simulated failure는 VMC로부터 50% 이하의 속도에서 시작되어야 한다. 만약 학생이 양 쪽 throttles를 즉시 당기지 않으면 교관은 언제든지 나머지 엔진의 mixture를 당길 수 있다.
FAA는 3,000ft AGL 미만에서 simulated engine failures를 시연할 경우 throttle을 부드럽게 감소시켜서 기동을 시작하도록 권장한다. 이렇게 하면 엔진은 계속 작동하며 필요하다면 즉시 사용할 수 있다. throttle을 부드럽게 감소시키면 엔진의 남용과 손상 가능성이 방지될 수 있다. VSSE 미만의 속도에서inflight engine failures를 시연하면 불필요한 위험이 발생한다.
만약 엔진이 dynamic crankshaft counterweights를 갖추고 있다면 simulated failures 도중throttle을 부드럽게 줄이는 것이 중요하다. dynamic counterweight가 손상될 수 있는 그 외의 상황들로는 high rpm and low manifold pressure combinations, overboosting, 그리고 propeller feathering이 있다. counterweights의 심각한 손상이나 반복적 남용은 결국 엔진 고장으로 이어질 것이다. dynamic counterweights는 크고 복잡한 엔진에서 발견된다. 비행기가 이를 갖추고 있는지 확인하기 위해 교관은 정비사나 엔진 제조업체에 문의할 수 있다.
교관이 엔진 고장을 시뮬레이션 하면 학생은 적절한 memory items를 수행하고 적절한 propeller control을 FEATHER position으로 당겨야 한다. zero thrust가 설정될 것이라는 전제 하에 교관은 즉시 propeller control을 앞으로 밀고 적절한 manifold pressure와 rpm을 설정한다. 교관은 본인의 의도를 학생에게 계속 알려주어야 한다. 이때 교관은 "I have the right engine; you have the left. I have set zero thrust and the right engine is simulated feathered."라 말할 수 있다. 누가 어떤 시스템이나 스위치를 작동하는지 확실하지 않으면 의도치 않은 결과가 발생할 가능성이 높아진다.
simulated engine failure 이후 교관은 “고장 난” 엔진을 관리하고 학생은 작동 중인 엔진을 관리한다. feathered propeller를 시뮬레이션 하기 위해 zero thrust가 설정되었다면 보통 cowl flap이 닫히고 mixture는 lean 된다. 가끔 엔진을 clearing 해주는 것 또한 바람직하다. zero-thrust 출력 설정에서 엔진이 장시간 냉각된 이후에는 가급적 높은 출력을 즉시 적용하지 않는다. 유능한 비행 교관은 실제 엔진 고장이 발생하였을 때 적시에 프로펠러를 feathering 하는 것이 중요하다는 것을 학생에게 가르친다. 부적절한 훈련을 받은 조종사들은 windmilling propeller가 여전히 유용한 추력을 만들어낸다는 잘못된 인식을 가지고 있으며 feathering은 프로펠러 회전을 중단시키기 때문에 심리적으로 feathering을 꺼리게 된다. 교관은 windmilling propeller를 갖춘 비행기와 feathered propeller(zero thrust)를 갖춘 비행기의 성능 차이를 설명하는데 충분한 시간을 할애해야 한다.
propeller feathering 훈련은 공항 착륙이 쉽게 이루어질 수 있는 고도 및 위치에서 수행되어야 한다. 이는 프로펠러가 다시 unfeather 되지 않을 경우를 대비하기 위함이다. 3.000ft AGL 너머에서 unfeathering과 restart가 완료되도록 계획한다. 이러한 고도가 single-engine service ceiling보다 높을 수도 있으며 이 경우에는 수평 비행이 불가능할 것이다.
feathering과 unfeathering을 반복하면 엔진과 기체에 무리가 가므로 훈련을 위해 필요한 경우에만 수행한다. 다발 등급 한정을 위한 FAA의 Airman Certification Standards에는 비행 도중 하나의 프로펠러를 feathering 및 unfeathering 하는 작업이 포함되어 있으며 이는 안전한 경우에만 수행되어야 한다.
비록 이 장은 하나의 엔진이 고장 난 다발 비행기의 고유한 비행 특성을 주로 다루었긴 하지만 현대의 왕복 엔진은 매우 신뢰할 수 있다. 저고도에서 simulated engine inoperative emergency를 수행하기 위해선 먼저 고고도에서의 engine inoperative procedures를 훌륭하게 숙달해야 하며위험을 완화하기 위해 보통 최소 400ft AGL에서 시작된다. 극도로 낮은 고도에서, 이륙 직후에, 혹은 VSSE 미만의 대기속도에서 simulated low altitude engine inoperative emergency를 수행하면 안전 여유가 존재하지 않는 상황이 발생한다.
위험한 기동을 훈련하고자 한다면, 혹은 더 진보된 다발 비행기로 자격증을 취득하고자 한다면 시뮬레이터 훈련 센터나 제조업체의 교육 과정을 고려한다. 포괄적인 훈련 매뉴얼과 강의실 수업이 시스템 교육 보조 도구, 시청각 자료, 그리고 비행훈련장치(flight training device) 및 모의비행장치(flight simulator)와 함께 제공된다. 시뮬레이션을 통해 다양한 환경 및 항공기 조건에서 훈련할 수 있다. 비행기로 수행하기엔 위험하거나 불가능한 비상 절차는 비행훈련장치나 모의비행장치를 통해 안전하고 효율적으로 수행될 수 있다. 비행훈련장치나 모의비행장치가 특정 비행기 제조사 및 모델과 같을 필요는 없다. 일반적인 훈련 장치 뿐만 아니라 다른 제조사 및 모델의 훈련 장치로도 매우 효과적인 교육을 받을 수 있다.
대부분의 다발 훈련은 4 ~ 6개의 자리를 갖춘 비행기에서 최대중량보다 훨씬 적은 무게로 수행된다. single-engine 성능이 놀라울 정도로 우수할 수 있다(특히 밀도 고도가 낮은 경우). 더 높은 무게, 고도, 그리고 온도에서 예상되는 성능을 경험시켜주기 위해 교관이 때때로 작동 엔진의 manifold pressure를 인위적으로 제한할 수도 있다. single-engine ceiling 너머에서 예상되는 성능 또한 이러한 방법을 통해 시뮬레이션 될 수 있다. 최대 이륙 무게 상태로 비상 상황을 연습하기 위해 비행기에 승객을 태우는 것은 불필요한 위험을 초래할 수 있으므로 피한다.
다발 훈련 도중 touch-and-go landing and takeoff를 수행하는 것은 항상 논란의 여지가 있었다. 극도로 제한된 시간 내에 비행기를 이륙 외장으로 만드는 위험성, 그리고full stop landing 이후에 경험하는 후속 조치의 부재로 인해 학습 경험의 가치가 상쇄될 수 있기 때문이다. 초반에 다발 비행기에 익숙해지는 동안에는 touch-and-goes가 권장되지 않는다.
만약 touch-and-goes를 수행하기로 하였다면 비행 전에 학생의 책임과 교관의 책임이 자세히 설명되어야 한다. 착지 후 학생은 보통 왼손으로 조종간을, 그리고 오른손으로 throttles를 잡고 방향 제어를 유지한다. 교관은 flaps와 trim을 다시 설정하고 비행기의 외장이 변경되면 이를 알린다. 다발 비행기는 touch-and-go 도중 단발 비행기보다 더 많은 활주로를 사용한다. 초반에 다발 비행기에 익숙해지는 동안에는 full stop-taxi back landing이 바람직하다. 다발 비행기로 solo touch-and-goes를 하는 것은 강력히 권장되지 않는다.
소형 다발 비행기는 양 쪽 엔진이 정상적으로 작동하는 한 단발 비행기와 아주 유사하게 다뤄진다. 허나 한 쪽 엔진의 추력이 손실될 수도 있으므로 조종사는 다발 비행기를 비행하는데 필요한 추가 지식, 위험 완화 전략, 그리고 실질적 기술을 습득해야 한다. 그렇게 되면 조종사는 안전한 결과로 이어지는 적절한 조처를 할 수 있다. 이 장은 보통 방향 제어 상실에 대하여 설명되었다. 또한 한 쪽 엔진이 작동하지 않는 상태에서 최대 성능을 얻는 방법도 상세히 설명되었다. 이러한 두 가지 고려사항들은 속도계의 red radial line(VMC)과 blue radial line(VYSE)에 해당한다. 조종사가 실속을 다룰 때, VMC를 다룰 때, 혹은 최대 성능을 다룰 때 취해야 하는 행동들은 서로 다르다. 이러한 개념을 이해하고, 위험을 완화하는 방법을 알고, 다양한 상황에서 엔진 고장을 처리하는 기술을 보유하면 다발 비행기를 조종할 때 성능과 안전이 향상된다.