정확한 비행계기 덕분에 조종사가 외부를 참조할 필요가 없어졌으며 이로 인해 항공기는 실용적인 운송 수단이 되었다. 비행계기는 안전한 비행을 수행하는데 있어 매우 중요하다. 따라서 조종사는 비행 계기의 작동 방법에 대한 기본적인 이해를 갖추어야 한다. VFR(visual flight rules)로 비행할 때 필요한 기본 비행계기에는 airspeed indicator(ASI), altimeter, 그리고 magnetic direction indicator가 있다. IFR(instrument flight rules)로 비행하는 경우에는 위의 계기들뿐만 아니라 gyroscopic rate-of-turn indicator, slip-skid indicator, 기압 조절이 가능한 sensitive altimeter, 시∙분∙초를 지시하는 시계, gyroscopic pitch-and-bank indicator(artificial horizon), 그리고 gyroscopic direction indicator(directional gyro나 이에 준하는 계기)가 필요하다.
IMC(instrument meteorological conditions)를 비행하는 항공기에는 자세와 방향을 제공하는 계기 뿐만 아니라 항법 계기(이륙부터 착륙까지 외부 참조 없이 정밀한 비행이 가능하도록 해주는 계기)도 장착되어 있다.
이 장에서 설명되는 계기들은 14 CFR part 91에서 요구하는 계기들이며다음 세 가지 그룹으로 구성된다: pitot-static instruments, compass systems, 그리고 gyroscopic instruments. IFR 비행을 위해 이 시스템들을 비행 전에 점검하는 방법이 이 장의 마지막에 설명된다. 이 장은 추가적인 항법 시스템들도 다룬다(예를 들어 EFIS – Electronic Flight Information Systems, GPWS – Ground Proximity Warning System, TAWS – Terrain Awareness and Warning System, TCAS – Traffic Alert and Collision Avoidance System, HUD – Head Up Display, 등등). 이러한 시스템들은 점점 범용 항공항공기에도 설치되는 추세이다.
pitot pressure는 상대풍을 향하여 설치된 pitot tube를 통해 감지된다. pitot tube는 항공기에 따라 ASI나air data computer와 연결된다.
Static Pressure
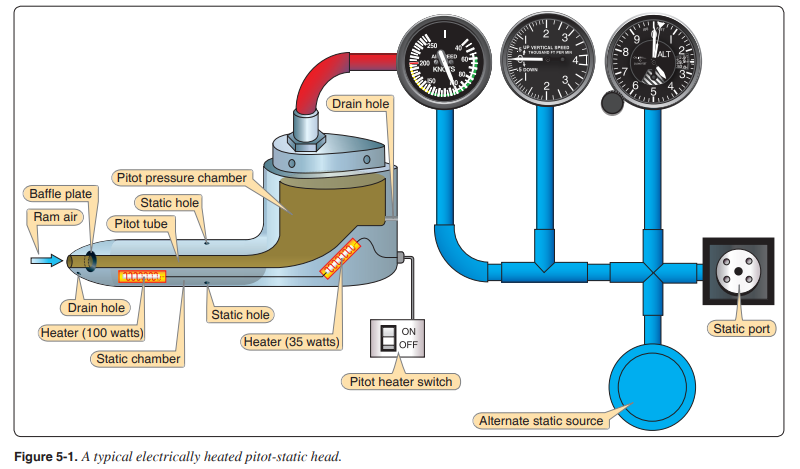
static pressures는 ASI 뿐만 아니라 고도 및 수직 속도를 결정하기 위한 이 외의 계기들에서도 사용된다. static pressure는 하나 이상의 지점에서 감지될 수 있다. static ports는 항공기 fuselage에 설치되거나pitot tube에 통합될 수 있다. [그림 5-1] static ports는 undisturbed air 쪽에 배치되며 항공기 양쪽에 하나씩 쌍을 이룰 수 있다. 이러한 이중 배치는 항공기의 lateral movement(예를 들어 side slip)로 인하여 올바르지 못한 정압이 표시되는 것을 방지한다. static ports 주변이 전기 히터를 통해 가열될 수도 있다. 이는 static ports에 얼음이 형성되는 것을 방지하기 위해서이다.
IFR로 비행하는 항공기 계기판에는 압력으로 작동하는 세 가지 기본 계기들이 있다. 이는 ASI, sensitive altimeter, 그리고 VSI(vertical speed indicator)이다. 이 세 가지 계기들은 작동을 위해 static pressure를 사용한다. 오직 ASI만이 작동을 위해 pitot pressure와 static pressure를 사용한다. [그림 5-2]
Blockage of the Pitot-Static System
ASI와 VSI에서 오류가 발생한다면 pitot tube나 static port(s)가(혹은 둘 다) 막혔을 가능성이 높다. 수분(얼음 포함), 먼지, 혹은 곤충들이 이 시스템들을 막을 수 있다. 비행 전 점검 도중 pitot tube cover가 벗겨져 있는지 확인해야 하며static port가 막혀있지 않고 손상이 없는지 확인해야 한다.
Blocked Pitot System
pitot tube drain hole이 막히면 pitot system이 부분적으로 차단되거나 완전히 차단될 수 있다. 동압이pitot tube로 들어오지 못하면 ASI가 작동하지 않는다. 만약 drain hole이 열려 있으면 diaphram 내부와 외부의 정압이 같아져서 지시 속도가 서서히 0으로 떨어진다. 만약 pitot tube ram pressure hole과 drain hole이 둘 다 막히면 ASI는 상승 및 하강 도중 고도계처럼 작동한다. 자세한 정보는 PHAK을 참조한다.
static system은 막혔으나 pitot tube는 정상 상태라면 ASI가 부정확한 지시를 나타낸다. 항공기의 static ports가 막혀버린 고도보다 높은 고도를 비행하면 속도계가 실제 속도보다 낮은 값을 지시한다. 왜냐하면 시스템에 갇혀 있는 정압이 높은 고도에서의 정압에 비해 높기 때문이다. 반대로 static ports가 막혀버린 고도보다 낮은 고도를 비행하면 속도계가 실제 속도보다 높은 값을 지시한다. 왜냐하면 시스템에 갇혀 있는 정압이 낮은 고도에서의 정압에 비해 낮기 때문이다.
정압 시스템이 막히면 고도계와 VSI에도 영향을 미칠 수 있다. 정압이 갇혔기 때문에 고도계는 static ports가 막혀버린 고도에 멈춰있는다. VSI의 경우에는 계속하여 0을 지시한다.
일부 항공기에서는 primary static source가 막힐 때를 대비하여 alternate static source를 제공한다. alternate static source는 보통 조종실 안에서 찾을 수 있다. 동체 주변을 흐르는 공기의 벤투리 효과로 인해 조종실 내부의 기압은 외부보다 낮다.
alternate static source가 사용되면 다음과 같은 계기 지시들이 확인된다:
1. Altimeter는 실제보다 약간 높은 고도를 나타냄.
2. ASI는 실제보다 높은 속도를 나타냄.
3. VSI는 순간 상승을 지시한 다음 안정화됨(단, 고도를 일정하게 유지하고 있는 경우).
Effect of Flight Conditions
static ports는 그 주변 공기가 최대한 방해받지 않는 곳에 위치한다. 그러나 일부 비행 조건에서는 static port 주변의 공기가altimeter와 ASI의 지시에 오류를 일으킬 수 있을 정도로 방해받을 수 있다(특히 landing gear와 flaps를 내린 상태에서 높은 받음각 상태인 경우). 이러한 계기들의 정확도는 매우 중요하기 때문에 항공기 테스트 중에정압 시스템의 position error가 검사된다.
POH/AFM에는 flaps와 landing gear의 다양한 외장 구성 시 적용해야 하는 속도 보정 값을 포함한다.
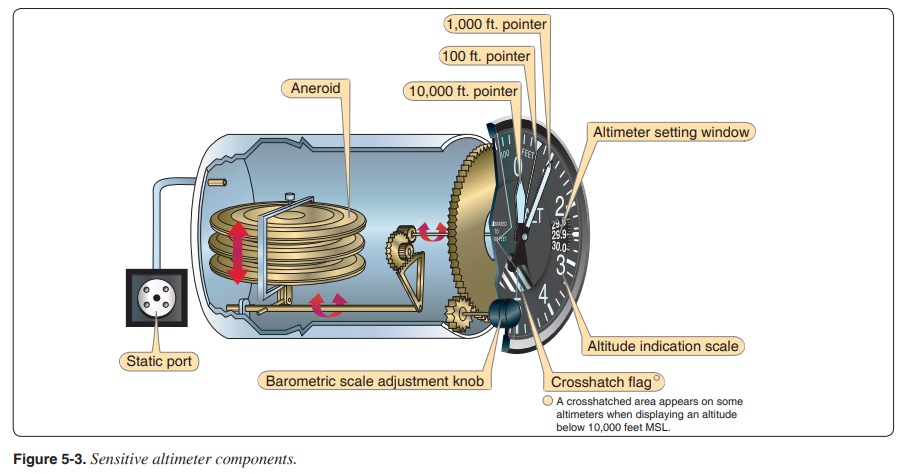
정밀 고도계(sensitive altimeter)는 주변 공기의 절대 압력을 측정하는 아네로이드 기압계이다. 이 계기는 특정 기압면(pressure level)으로부터의 고도를 feet나meter로 표시한다.
Principle of Operation
진공 상태인 아네로이드 캡슐들이 정밀 고도계 내에서 고도를 감지한다. [그림 5-3] 아네로이드에 작용하는 공기 압력은 아네로이드의 탄성(팽창하려는 힘)에 대항하여 아네로이드를 압축하려 만든다. 그 결과 대기압이 변화함에 따라 아네로이드의 두께가 변화한다. 여러 개의 아네로이드를 사용하면 압력 변화에 의한 부피 변화가 커진다.
10,000ft 미만에서는 흰색과 검정색의 줄무늬가 보인다. 10,000ft 너머에서는 마스크가 이를 점점 덮기 시작하며15,000ft 너머에서는 모든 줄무늬가 가려진다. [그림 5-4]
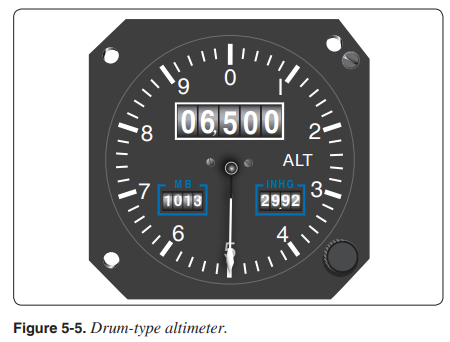
또 다른 형식의 고도계로 drum-type이 있다. [그림 5-5] 이 계기는 1,000ft마다 한 바퀴를 회전하는 지시침을 가지고 있다. 각각의 숫자는 100ft를 나타내며 각각의 표시는 20ft를 나타낸다. drum은 천 피트 단위를 표시하며 지시침을을 구동하는 메커니즘에 맞춰져 있다. 이러한 형식의 고도계를 읽기 위해선 먼저 drum을 통해 천 피트 단위를 확인한 다음 지시침을 통해 백 피트 단위를 확인해야 한다.
정밀 고도계로는 barometric scale을 조절할 수 있다. 이를 통해 조종사는 고도가 측정되는 기준면을 설정할 수 있다. 이 눈금은 Kollsman window라 불리는 작은 창을 통해 확인할 수 있다. 계기의 knob을 통해 이 눈금을 조정한다. 눈금의 범위는 28.00 ~31.00(″Hg), 혹은 948 ~1,050 millibar이다.
knob를 돌리면 barometric scale과 altimeter pointers가 모두 변화한다. barometric scale 1″Hg의 변화는 altimeter pointers를 1,000ft 변화시킨다. 이는 5,000ft 미만에서의 표준 기압 감률이다. barometric scale이 29.92″Hg나1,013.2 millibar로 조정되면 altimeter pointer는 기압 고도를 지시한다. 조종사는 barometric scale을 local altimeter setting으로 조정함으로서 지시 고도를 얻을 수 있다. 이를 통해 고도계는 해수면 기압으로부터의 고도를 나타낸다.
Altimeter Errors
정밀 고도계는 표준 조건에서 표준 변화를 나타내도록 설계되었다. 허나 대부분의 비행은 비표준 조건으로 인한 오차를 포함하고 있으므로 조종사는 이러한 오차를 수정할 수 있어야 한다. 오차에는 두 가지 유형이 있다: mechanical error와inherent error.
Mechanical Altimeter Errors
고도계의 상태를 확인하기 위한 비행 전 점검을 위해 barometric scale을 local altimeter setting으로 설정해야 한다. 고도계는 공항의 표고를 나타내야 한다. 만약 고도계 지시가 공항 표고로부터 75ft 이상 차이가 나면 계기를 다시 교정해야 한다. 주변 온도 및/혹은 압력의 차이는 잘못된 고도계 지시를 발생시킨다.
Inherent Altimeter Error
표준 온도보다 높은 지역을 비행할 경우 공기의 밀도는 낮고 기압면이 멀어진다. 이때 항공기가 지시 고도 5,000ft를 비행하면 해당 고도에 대한 기압면이 표준 온도에서의 기압면보다 더 높다. 표준 온도보다 낮은 지역을 비행하는 경우에는 공기 밀도가 높고 기압면이 가까워진다. 이때 항공기가 지시 고도 5,000ft를 비행하면 진고도가 낮다. [그림 5-6]
Cold Weather Altimeter Errors
올바르게 교정된 기압 고도계는 평균 해수면(MSL)으로부터의 진고도를 나타낸다(단, 표준 기압 및 표준 온도를 운영 중인 경우). 비표준 기압 조건은 정확한 local altimeter setting을 적용하여 수정된다.
온도가 ISA보다 높은 경우에는 진고도가 지시고도보다 높은 오류가 나타난다. 온도가 ISA보다 낮은 경우에는 진고도가 지시고도보다 낮은 오류가 나타난다. 온도가 ISA보다 낮을 때 발생하는 진고도 변화는 불충분한 장애물 회피의 위험을 가지고 있다.
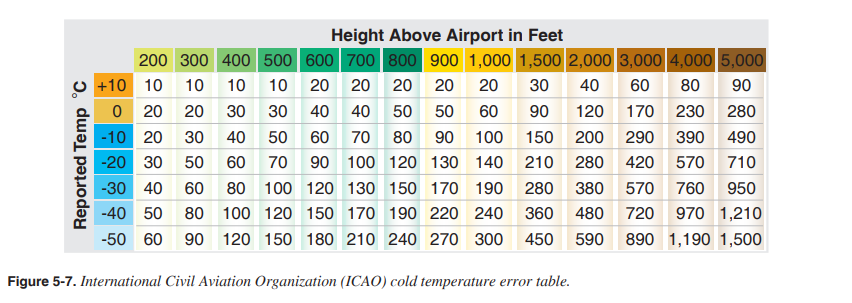
온도가 매우 낮운 조건일 때 조종사는 차트의 IFR 고도에 그림 5-7의 온도 보정을 더해야 할 수 있다. 이는 지형 및 장애물 회피를 보장하기 위함이다. 그러나 다음의 제한사항들은 준수해야 한다:
• ATC로부터 특별히 지정받은 고도(예를 들어 “maintain 5,000ft”)는 보정되어선 안 된다. 낮은 온도로 인하여 지형 및 장애물 회피가 불충분하다고 판단된다면 조종사는 할당받은 고도를 거부할 수 있다.
• 차트의 IFR 고도(예를 들어 procedure turn altitudes, final approach fix crossing altitudes, 등등)에 온도 보정을 적용하는 경우 조종사는 적용된 보정 값을 ATC에 알려야 한다.
ICAO Cold Temperature Error Table
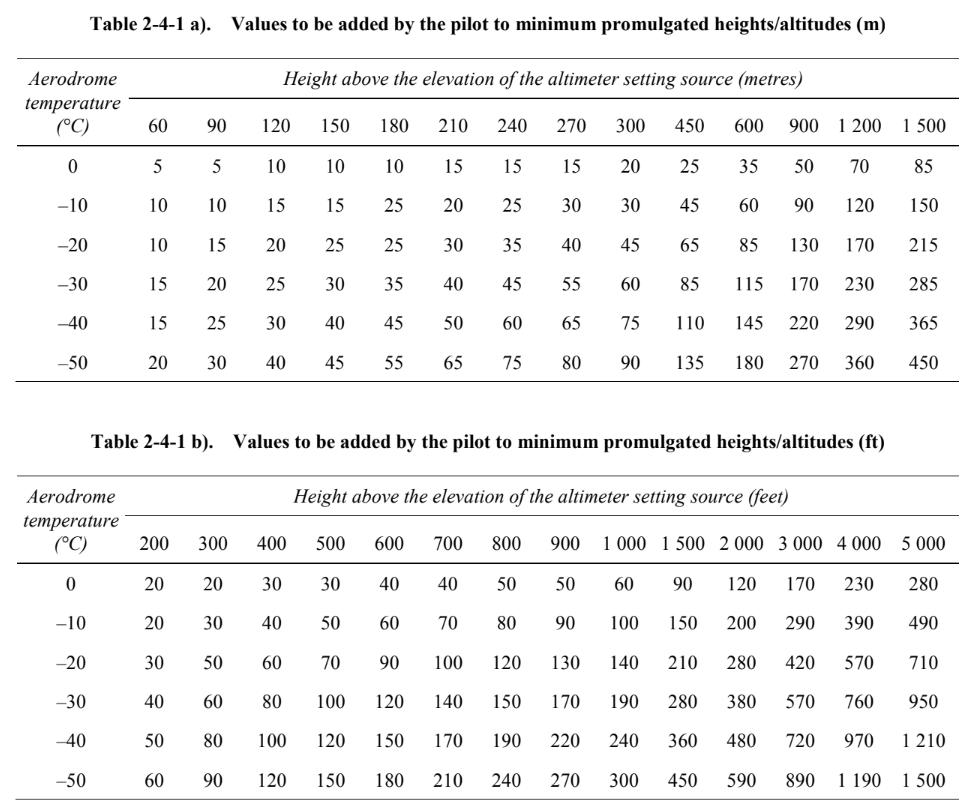
온도가 표준 온도보다 매우 낮으면 고도계 오차가 매우 클 수 있다. 매우 낮은 온도 조건을 비행하는 조종사는 minimum terrain clearance altitudes를 높여야 할 수 있다. 지형과의 간격이 적은 곳을 비행하는 경우에는 더 높은 고도를 선택해야 할 수도 있다. air data computers를 갖춘 대부분의 FMS(flight management systems)는 낮은 온도로 인한 오차를 보정하는 기능을 가지고 있다. 이러한 시스템을 갖춘 항공기의 조종사는 해당 시스템이 자동으로 오차를 보정하는 조건을 알아야 한다. FMS가 자동으로 보정을 적용하고 있거나 조종사가 직접 보정을 적용하고 있다면 조종사는 할당받은 고도를 비행하고 있지 않다는 사실을 ATC에 알려야 한다. 그렇지 않으면 다른 항공기와의 수직 분리가 감소하여 위험한 상황이 발생할 수 있다. ICAO에서 발행한 그림 5-7의 표는 온도가 매우 낮을 때 얼마나 큰 오차가 발생할 수 있는지를 보여준다. 이 표를 사용하기 위해 먼저 현재 보고된 온도를 왼쪽 열에서 찾는다. 그런 다음 맨 위의 height above the airport/reporting station을 확인한다. FAF(final approach fix) 고도에서 공항 표고를 뺀다. 행과 열이 교차하는 지점이 오차의 양을 나타낸다.
Example: 현재 보고된 온도는 –10°C 이고 FAF는 공항 표고로부터 500ft 높이에 있다. 현재 보고된 altimeter setting을 사용하면 항공기가 지시고도로부터 50ft 아래에 있을 수 있다.
고도계 오차는 height above the reporting station과 reported temperature에 비례한다. IFR 접근 절차를 수행하는 경우에는 reporting station elevation을 airport elevation이라 가정한다. 이러한 보정은 항공기 비행 고도에서의 온도가 아닌 reporting station에서의 온도를 기준으로 하며 차트의 IFR 고도가 아닌 height above the reporting station을 기준으로 한다는 점을 이해해야 한다.
보정이 어떻게 적용되는지를 확인하기 위해 다음 예시를 참조하라:
IFR 접근 차트가 제공하는 정보는 다음과 같다:
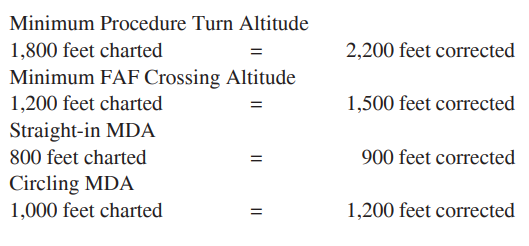
적절한 온도 보정 값을 결정하는 예시로 1,800ft의 Minimum Procedure Turn Altitude를 사용해 보자. 일반적으로 고도 값은 가장 가까운 100ft로 반올림된다. procedure turn altitude(1,800ft)에서 airport elevation(500ft) 빼면 1,300ft이다. 1,300ft의 고도 차이는 correction chart elevation에서 1,000ft와 1,500ft 사이에 위치한다. station 온도인 –50°C에서 보정 값은 300ft와450ft 사이에 위치한다. 이 보정 값 차이(300ft와 450ft의 차이)를 고도 차이(1,000ft와 1,500ft 차이)로 나누면 고도 1ft 당 보정 값이 나온다.
이 경우 150ft를 500ft로 나눈 값을(=0.33ft) 1,000ft로부터 매 1ft마다 더한다. 이는 1,000ft 고도에 해당하는 300ft 보정 값에 100ft(0.33 x300ft =99ft를 반올림 한 것)의 추가 보정 값을 제공한다. 300ft에 100ft를 더하여 총 온도 보정 값인 400ft를 산출한다. 주어진 조건에서 차트에 적힌 1,800ft MSL을 보정하기 위해선 400ft를 더해야 한다. 따라서 지시고도 2,200ft를 비행하면 항공기의 진고도는 1,800ft이다.
※ 다음은 ICAO DOC 8168을 발췌한 내용이다.
4.3 TEMPERATURE CORRECTION
4.3.1 Requirement for temperature correction
지표면에서의 주변 온도가 표준 대기에서의 온도보다 훨씬 낮다면 minimum safe altitudes/heights가 조정되어야 한다. 이 경우 altimeter setting source에서 측정된 온도가 표준 대기에서의 온도보다 10°C 낮아질 때마다 고도를 4%씩 높인다. 이는 온도가 -15°C 이상일 때 altimeter setting source altitudes에 적용하는 것이 안전하다.
4.3.2 Tabulated corrections
온도가 더 낮은 경우에는 표 2-4-1 a)와 2-4-1b)를 통해 더 정확한 보정을 얻어야 한다. 이 표는 해수면 공항에 대해 계산된 것이다. 따라서 표고가 높은 공항에 이 표를 적용하면 보수적으로 계산된다. 이러한 공항에 대한, 혹은 표에 적혀있지 않은 값에 대한 계산을 위해선 4.3.3, "Corrections for specific conditions"를 참조한다.
Note 1. - 보정 값은 다음 5m나 10ft 단위로 반올림되어야 한다.
Note 2. - 항공기로부터 가장 가까운 reporting station(일반적으로 공항)의 온도 값을 사용해야 한다.
Nonstandard Pressure on an Altimeter
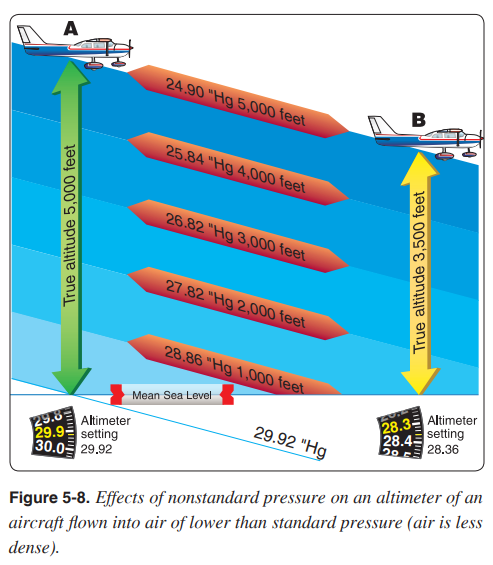
대기압은 일정하지 않으므로 최신 altimeter setting을 사용하는 것이 중요하다. 즉, 특정 지점에서의 압력이 조금 떨어진 지점에서의 압력보다 높을 수 있다. altimeter setting이 29.92″로 설정된 항공기를 예로 들어보자. 항공기가 압력이 낮은 지역으로 이동할 때(그림 5-8의 A 지점에서 B 지점으로 이동할 때) 조종사가 altimeter setting을 조정하지 않으면 압력이 감소함에 따라 진고도가 낮아진다. altimeter settings를 조정하면 이를 보정할 수 있다. 고도계가 5,000ft를 지시할 때 A 지점에서는 진고도(평균해수면으로부터의 고도)가 5,000ft이지만 B 지점에서는 3,500ft에 불과하다. “따뜻한 곳에서 차가운 곳으로, 혹은 기압이 높은 곳에서 기압이 낮은 곳으로 비행할 때는 발밑을 조심하라.” [그림 5-8]
Altimeter Enhancements(Encoding)
공역 내에서 항공기의 고도 정보를 조종사만 아는 것은 충분하지 못하다. 항공 교통 관제사 또한 항공기의 고도를 알아야 한다. 이러한 정보를 제공하기 위해 항공기에 보통 encoding altimeter가 장착된다.
트랜스폰더가 Mode C로 설정되면 encoding altimeter가 100ft 단위의 항공기 비행 고도를 일련의 펄스를 통해 트랜스폰더에 공급한다. 이 일련의 펄스는 지상 레이더로 전송되어 관제사의 스코프에 표시된다. 지상 관제사는 트랜스폰더를 통해 항공기를 식별할 수 있으며 항공기가 비행 중인 기압 고도도 확인할 수 있다.
encoding altimeter 내의 컴퓨터는 29.92″Hg를 기준으로 압력을 측정한 다음 이 정보를 트랜스폰더에 전달한다. 조종사가 기압계를 local altimeter setting으로 조정한다 하여도 트랜스폰더가 전송하는 정보는 영향을 받지 않는다. 이는 모든 Mode C 항공기가 동일한 기압면 고도를 기준으로 정보를 전송하게 만들기 위함이다. ATC 장비는 국지적 기압 차이를 보정하여 스코프에 표시된 고도들을 조정한다. 이는 스코프의 항적들이 정확한 고도를 나타낼 수 있게 만들기 위함이다. 트랜스폰더가 전송하는 고도와 고도계가 지시하는 고도의 차이는 125ft 이내여야 한다(14 CFR part 91).
Reduced Vertical Separation Minimum(RVSM)
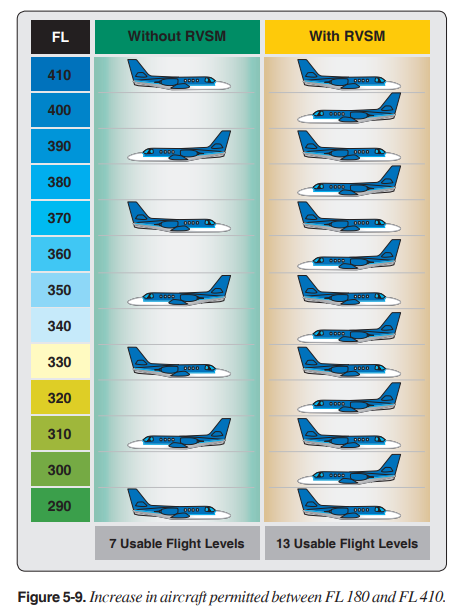
31,000ft 미만의 고도에서는 flight levels 사이에 최소 1,000ft의 간격이 필요하다. Flight levels(FLs)는 보통 18,000ft에서 시작된다(단, local pressure가 29.92″Hg 이상인 경우). 18,000ft 이상인 모든 항공기는 29.92″Hg의 표준 altimeter setting을 사용하며 FL이라는 용어를 사용한다. FL 180 ~FL 290에서는 최소 1,000ft의 항공기 간격이 필요하다. 그러나 FL 290 너머에서는2,000ft의 분리가 적용된다. 이는 항공기 장비 및 보고 기능으로 인한 오차의 가능성 때문이다. FL 290다음에는 FL 310가 뒤따르며 이렇게 FL 410까지 총 7개의 FL가 비행될 수 있다. FL 290 ~FL 410 사이의 수직 거리를 1,000ft로 감소시킬 경우 6개의 FL을 추가로 사용할 수 있다. 이를 통해 FL 180 ~FL 410까지 정상적인 비행 고도 및 방향 관리가 유지된다. 따라서 이를 RVSM(Reduced Vertical Separation Minimum)이라 부른다. 이는 미국 국내에서 적용되기 때문에 United States Domestic Reduced Vertical Separation Minimum(DRVSM)으로 불린다.
그러나 항공기 장비 및 조종사 훈련과 관련된 DRVSM 프로그램에 참여하기 위해선 비용이 발생한다. 예를 들어 altimetry error가 크게 줄어야 하며 RVSM을 사용하는 운영자는 해당 민간 항공 기관의 승인을 받아야 한다. RVSM 항공기는 altitude-keeping performance standards를 충족해야 한다. 또한 운영자는 현재 비행 중인 공역에 적용되는 RVSM 정책/절차에 따라 운영해야 한다.
항공기는 다음을 충족하는 automatic altitude control을 하나 이상 갖추어야 한다:
∙ 직진수평 비행 도중 해당 고도로부터 ±65ft의 허용 오차 범위 이내.
∙ flight management/performance system 입력이 가능한automatic altitude control을 갖춘 항공기가 1997년 4월 9일 이전에 형식 증명을 받은 경우에는 ±130ft의 허용 오차 범위 이내(단, 난기류가 없는 조건에서).
이러한 항공기에는 altitude alert system가 반드시 장비되어야 한다. 이 시스템은 조종사에게 표시되는 고도가 selected altitude로부터200ft 이상 벗어났을 때 경보를 제공한다. full RVSM flight envelope의 각 조건에 대해 residual static sorce error와 avionics error를 합한 최대 절대값이 200ft를 초과해서는 안 된다. TCAS를 갖춘 항공기는 RVSM Operations와 호환되어야 한다. 그림 5-9는 FL 180 ~FL 410에 수용할 수 있는 항공기의 양이 증가하였음을 보여준다. 가장 주목할 만한 것은 높은 FL를 더 많은 항공기가 이용할 수 있게 됨에 따라 항공기들이 얻게 될 경제성이다.
Vertical Speed Indicator(VSI)
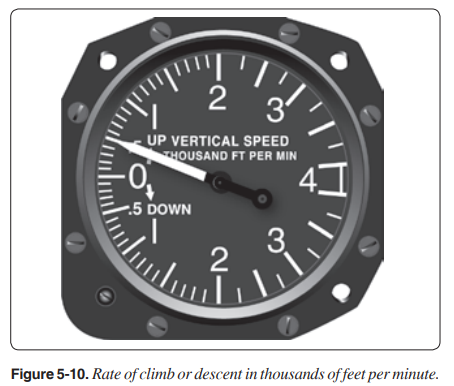
그림 5-10의 VSI는 vertical velocity indicator(VVI)라고도 불리며 이전에는 rate-of-climb indicator라 불렸었다. 이는 일정한 기압면으로부터 발생하는 압력 변화율을 나타내는 계기이다.
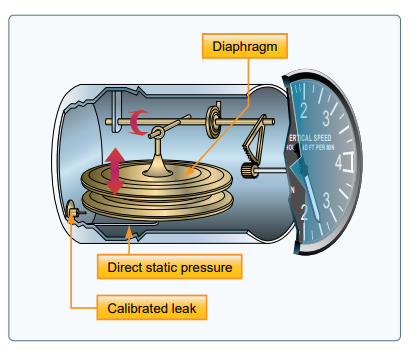
계기 내부에는 속도계와 매우 유사한 아네로이드가 존재한다. 아네로이드의 내부와 계기 케이스의 내부는 모두 정압 시스템과 연결된다. 그러나 계기 케이스는 calibrated orifice를 통해 연결되기 때문에 케이스 내부의 압력은 아네로이드 내부의 압력보다 더 느리게 변화한다. 항공기가 상승하면 정압이 낮아진다. 케이스 내부의 압력은 아네로이드를 압축하여 계기 지시침을 위로 이동시킨다. 이를 통해 상승률이 fpm으로 표시된다.
(출처: PHAK)
항공기가 수평을 잡으면 압력의 변화가 발생하지 않는다. 계기 케이스 내부의 압력과 아네로이드 내부의 압력이 같아지고 계기 지시침이 수평(0)으로 되돌아간다. 항공기가 하강하면 정압이 증가한다. 이 경우에는 아네로이드가 팽창하여 계기 지시침을 아래로 향하게 만들며 하강이 표시된다.
VSI의 지시는 실제 압력 변화보다 몇 초 늦다. 허나 VSI는 고도계보다 훨씬 민감하며 항공기의 상승/하강 경향을 지시하는데 유용하므로 일정한 고도를 유지하는데 도움이 된다.
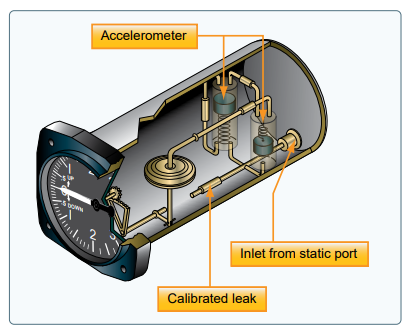
IVSI(instantaneous vertical speed indicators)라 불리는 더욱 복잡한 VSI들 중 일부는 가속도계로 작동하는 공기 펌프를 두 개 가지고 있다. 이는 위쪽/아래쪽으로 향하는 pitch 변화를 감지하여 즉 압력 차이를 만들어낸다. pitch 가속에 의한 압력이 사라질 때쯤에는 고도에 의한 압력 변화가 발효된다.
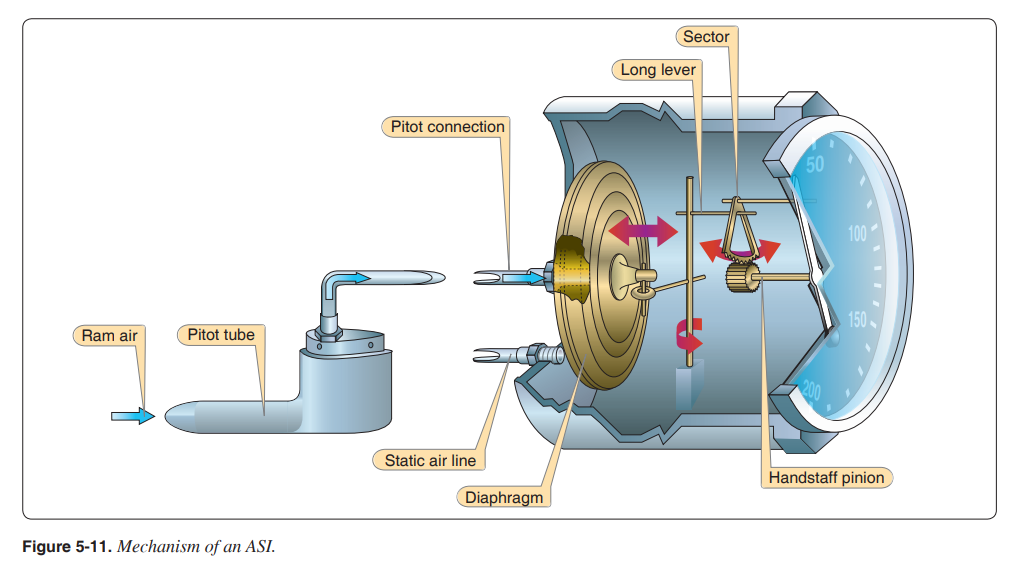
속도계는 항공기가 비행하는 공기의 동압을 측정하는 차압계이다. 동압이란 항공기의 움직임을 통해 발생하는 총 압력과 주변 정압의 차이이다. 이 두 가지 압력은 pitot-static system을 통해 얻어진다.
속도계는 diaphragm으로 구성되며 이는 pitot tube로부터 압력을 받는다. [그림 -11]계기의 케이스는 밀봉되어 있으며 static ports와 연결되어 있다. pitot pressure가 증가하거나 static pressure가 감소하면 diaphragm이 팽창한다. 이러한 diaphragm의 변화가 계기판의 지시침을 구동한다. 대부분의 속도계는 knots 단로 눈금 된다(일부 계기는 statute miles per hour를, 혹은 statute miles와 nautical miles를 둘 다 표시한다).
Types of Airspeed
고도의 종류가 여러 가지인 것처럼 속도에도 다양한 종류가 있다: indicated airspeed(IAS), calibrated airspeed(CAS), equivalent airspeed(EAS), true airspeed(TAS).
Indicated Airspeed(IAS)
IAS는 계기판에 나타나는 속도이다. 이는 계기 오차나 시스템 오차를 보정하지 않은 속도이다.
Calibrated Airspeed(CAS)
CAS는 IAS에서 계기 오차와 위치 오차를 보정한 속도이다. POH/AFM은 IAS에서 이러한 오류들을 보정하는 차트나 그래프를 제공하며 다양한 외장에서의 CAS를 제공한다.
Equivalent Airspeed(EAS)
EAS는 CAS에서 pitot tube 내부의 공기 압축을 보정한 속도이다. 해수면 상 표준 대기에서는 EAS와 CAS가 같다. 속도와 기압 고도가 증가함에 따라 CAS가 기존 값보다 높아지므로 공기 압축에 대한 보정 값을 빼주어야 한다.
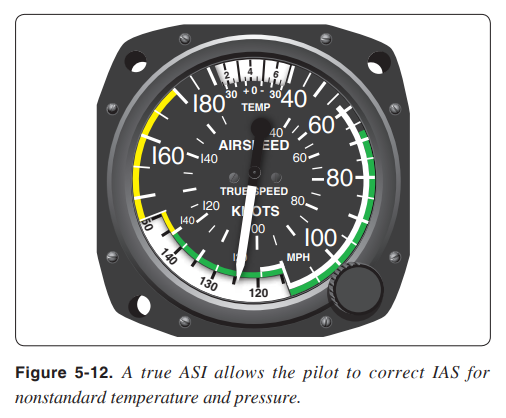
True Airspeed(TAS)
TAS는 CAS에서 비표준 압력 및 온도를 보정한 값이다. 해수면 상 표준 대기에서는 TAS와 CAS가 같다. 비표준 대기에서는 CAS에 기압 고도와 온도에 대한 보정을 적용해야만 TAS를 얻을 수 있다.
일부 항공기의 계기 케이스 내부에는 temperature-compenstaed aneroid belllows가 장착된다. 이 장치는 계기 지시침이 TAS를 지시할 수 있도록 계기 케이스 내부의 요동축 움직임을 수정한다.
TAS indicator는 진대기속도와 지시대기속도를 둘 다 지시한다. 이러한 계기에는 기존의 속도계에 subdial이 추가된다. 계기의 knob를 통해 현재 비행중인 기압 고도에 대한 외부 온도를 subdial에 맞출 수 있다. 이를 통해 계기 지시침은 subdial 상에 TAS를 지시한다. [그림 5-12]
Mach Number
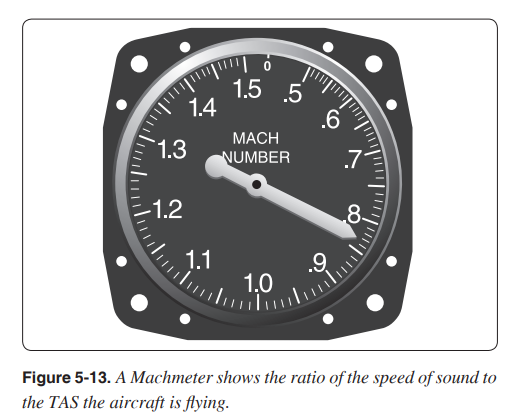
항공기가 음속에 근접하면 특정 영역을 흐르는 공기가 음속에 도달하기 전까지 빨라진 후에 충격파가 형성된다. 이러한 상황이 발생하는 IAS는 온도에 따라 변화한다. 때문에 대기속도는 다가올 문제들을 조종사에게 경고하기에 적합하지 않다. 대신 마하수가 더 유용하다. 마하수란 음속에 대한 항공기 TAS의 비율이다. 음속으로 비행하는 항공기는 Mach 1.0으로 비행한다. air data computer에 의해 작동하지 않는 일부 오래된 기계식 Machmeters는 계기 내부의 altitude aneroid를 사용하며이는 pitot-static 압력을 마하수로 변환한다. 이러한 시스템은 모든 고도에서의 온도가 표준 온도라 가정한다. 따라서 실제 온도가 표준 온도와 다르면 마하수 값이 부정확하다. 이러한 시스템을 indicated Machmeters라 부른다. 현대의 전자식 Machmeters는 air data computer를 사용하여 온도 오류를 수정한다. 이러한 시스템은 실제 마하수를 표시한다.
대부분의 고속 항공기는 해당 항공기가 비행할 수 있는 최대 마하수로 제한된다. 이 값은 Machmeter에 소수점 단위로 표시된다. [그림 5-13] 예를 들어 Machmeter가 .83을 지시하고 항공기가 30,000ft(표준 조건에서 음속이 589.5knots인 지점)로 비행하고 있다면 항공기 속도는 489.3노트이다. 음속은 기온에 따라 달라진다. 만약 항공기가 Mach .83의 속도로 10,000ft(30,000ft보다 훨씬 따뜻한 고도)를 비행한다면 항공기 속도는 530노트이다.
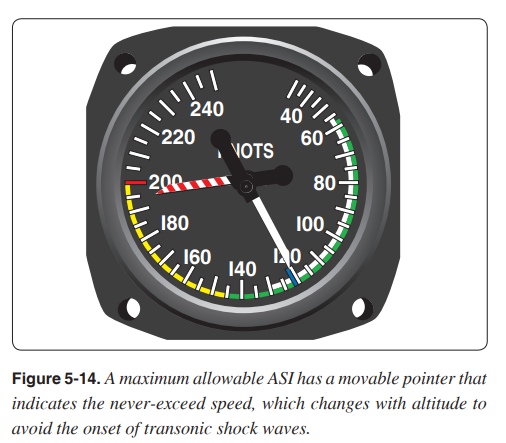
Maximum Allowable Airspeed
높은 아음속을 비행하는 일부 항공기는 그림 5-14와 같은 maximum allowable ASI를 장비한다. 이 계기는 기본적인 속도계와 매우 유사하며 노트 단위로 눈금이 매겨지지만 붉은색 체크무늬 지시침이 있다는 점이 다르다. maximum airspeed pointer는 aneroid나altimeter mechanism을 통해 작동한다(공기 밀도가 감소하면 더 적은 값으로 움직임). airspeed pointer를 maximum pointer보다 낮게 유지하면 transonic shock wave가 발생하는 것을 방지할 수 있다.
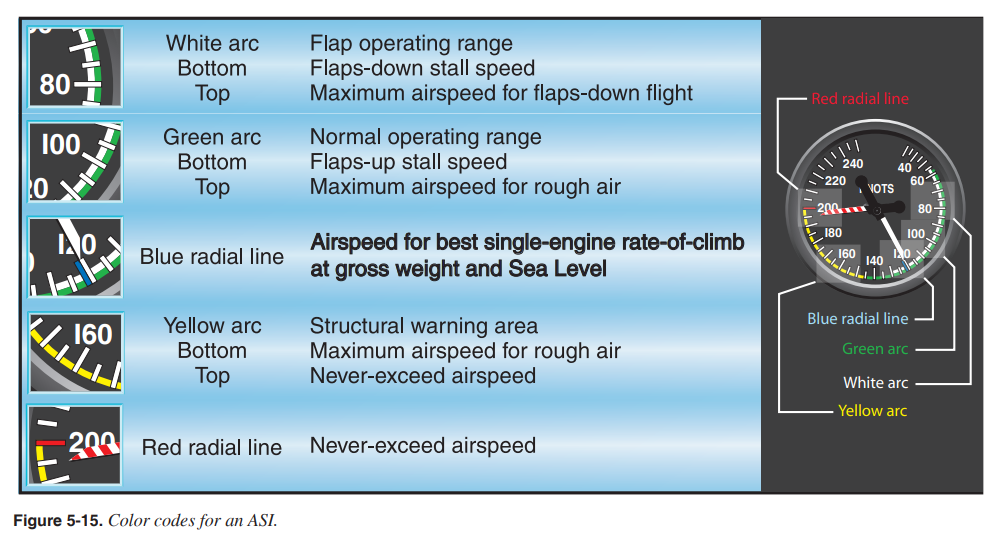
Airspeed Color Codes
항공기가 비행중인 속도의 의미를 한눈에 알리기 위해 속도계에 색깔이 칠해져 있다. 이러한 색깔들과 관련된 속도들이 그림 5-15에 나타나있다.
지구는 자기장으로 둘러싸인 거대한 자석이다. 자기장은자기력선으로 이루어져 있으며이러한 자기력선들은 자북에서 자남으로 들어간다.
자기력선은 두 가지 중요한 특성은 가진다:자유롭게 회전하는 모든 자석은 자기력선에 연장됨,자기력선을 가로지르는 모든 전도체에는 전류가 유도됨.항공기에 설치된 대부분의direction indicators는 이 두 가지 특성 중 하나를 사용한다.
The Basic Aviation Magnetic Compass
방향을 지시하는 가장 오래되고 간단한 계기들 중 하나는 자기 나침반이다.나침반은VFR 비행과 IFR비행에 필요한 기본 계기이다(14 CFR part 91).
Magnetic Compass Overview
자석이란 보통 철을 포함하는 금속이며 이는 자기력선을 끌어당긴다.모든 자석들은 그 크기와 상관없이 두 개의 극을 가진다:북극과 남극.하나의 자석이 다른 자석의 자기장에 놓이면 서로 다른 극들은 서로를 끌어당기고 서로 같은 극들은 서로를 밀어낸다.
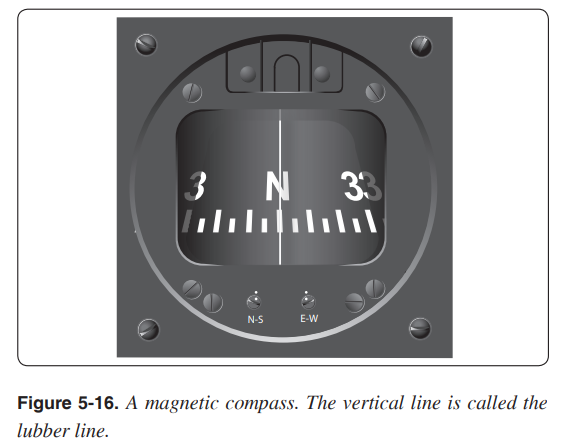
항공기 자기 나침반 안에는 두 개의 작은 자석이 있으며 이들은metal float에 부착된다. metal float는 투명한 나침반 액체(등유와 비슷함)가 담긴 그릇 안에 밀봉된다. [그림 5-16] card라 불리는 눈금이float를 감싸며이를 계기의lubber line을 통해확인할 수 있다. card에는 기본 방위(north, east, south, west)를 나타내는 문자들과30도 간격의 숫자들이 표시된다.숫자들의 마지막“0”은 생략된다:예를 들어3=30도이고, 6=60도이며, 33=330도이다.문자와 숫자 사이에는 긴 눈금과 짧은 눈금이 있다.긴 눈금은10도를 나타내며 짧은 눈금은5도를 나타낸다.
(출처: Aeronautics Guide)
Magnetic Compass Construction
float and card assembly의 중앙에는pivot이 있는데이는 스프링이 장착된jewel cup내에서 작동한다. flot의 부력으로 인해 pivot에 가해지는 무게는 거의 없으며 나침반 액체가 float와card의 진동을 감쇠시킨다.이러한jewel-and-pivot 설계를 통해float가 자유롭게 회전할 수 있으며 대략18도의bank angle까지 기울여질 수 있다.더 깊은bank angle에서는 나침반 지시가 불규칙해진다.
compasshousing은 나침반 용액으로 가득 차 있다.온도 변화로 인해 용액이 팽창 및 수축하여 나침반이 손상되는 것을 방지하기 위해 나침반 뒷면이 flexible diaphragm이나metal bellows로밀봉된다.
Magnetic Compass Theory of Operations
자석은 지구 자기장과 정렬되며 조종사는lubber line을 통해 방향을 읽는다.조종사는compass card의 뒤편에서 compass card를 바라보고 있다는 것을 주의하라.조종사가 북쪽을 향하여 비행할 때 동쪽은 조종사의 오른쪽이다. 허나card의“33”은 "N"의 오른쪽에 있다. 왜냐하면 card는 가만히 있으나 compasshousing과 조종사가 card를 중심으로 회전하기 때문이다.이러한 구조 때문에 나침반은 읽기에 헷갈릴 수 있다.
Magnetic Compass Errors
자기 나침반은 계기판에서 가장 간단한 계기이지만 많은 오류를 가진다:Variation, Deviation, Dip errors, Northerly Turning Errors, Southerly Turning Errors, Acceleration Error, 그리고 Oscillation Error.
Variation
지구는 지리적 축선을 중심으로 회전한다.지도와 차트들은 지리적 극점을 통과하는 자오선을 통해 그려진다.진북으로부터 측정된 방향을 true directions라 부른다. 자기 나침반이 가리키는 북극은 지리적 북극과 일치하지 않으며 약 1,300마일 떨어져 있다. 자북으로부터 측정된 방향을 magnetic directions라 부른다. 공중 항법에서는 진북과 자북의 차이를 편차(variation)라 부른다(육상 항법에서는 이를declination이라 부름).
그림 5-17은등편차선(isogonic line)을 보여주며 이는 편차의 양을 나타낸다.시카고 근처를 지나는 선을 무편차선(agonic line)이라 부른다.이 선에서는 두 극이 정렬되어 있으며 편차가 없다.이 선으로부터 동쪽에 위치하는 경우에는 자북이 지리학상 북극의 서쪽에 있다.따라서true direction을 얻으려면 나침반 지시를 수정해야 한다.
예를 들어 워싱턴D.C.를 비행할 때에는 편차가 10도 서쪽이다.만약 조종사가 남쪽(180도)으로 향하는true course를 비행하고자 한다면 여기에 편차를 더해서 190도의magnetic course를 비행해야 한다.로스앤젤레스 캘리포니아를 비행할 때에는 편차가 14도 동쪽이다. 만약 조종사가180도의true course를 비행하고자 한다면 여기에 편차를빼서 166도의magnetic course를 비행해야 한다. 편차는 항공기의heading과 무관하며 등편차선을 따라 어느 곳에서든 같다.
Deviation
나침반의 자석은 모든 자기장에 정렬된다.전류의 흐름, 자화된 부품,그리고 자기장과의 충돌은 항공기 내에 자기장을 만들어낸다.이러한 항공기 자기장들은 자차(deviation)이라 불리는 나침반 오류를 만든다.
자차는항공기heading에 따라 달라진다. 그리고항공기의 지리적 위치는 자차에 영향을 미치지 않는다.누구도편차를 줄이거나 변화시킬 수는 없다.허나AMT(aviation maintenance technician)은“swinging the compass”라 알려진 정비 작업을 통해편차를 최소화할 수 있다.
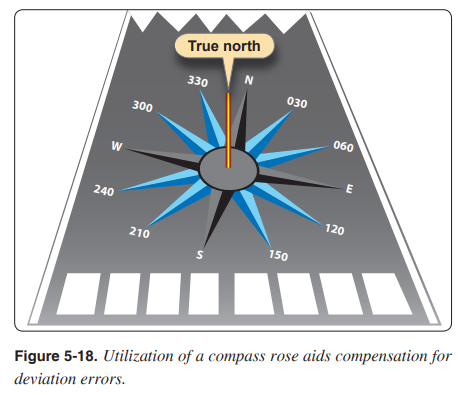
AMT는compass를swing하기 위해보통 항공기를compass rose에 위치시킨다. [그림 5-18] compass rose는 매30도마다 표시되는 일련의 선들로 구성되어 있으며자북을 기준으로 한다. compass rose에서는 자기 간섭이 적다.조종사는 항공기를compass rose로 이동시킨 후에 AMT가 지정하는 heading으로 항공기를 배치시킬 수 있다.
항공기가compass rose heading에 정렬되면AMT는 나침반의 위나 아래에 위치한compensator assembly를 조정한다. compensator assembly는 두 개의 축을 가진다.이들의 끝에는 드라이버 슬롯이 있으며 나침반의 앞부분을 통해 이용할 수 있다.각 축은 한 개나 두 개의 작은compensating magnets를 회전시킨다.하나의 축 끝부분은E-W로 표시되어 있다.이 축의compensating magnets는 항공기가 동쪽이나서쪽으로 향할 때 나침반에 영향을 미친다.다른 축의 끝부분은N-S로 표시되어 있으며 이 축의compensating magnets는 항공기가 북쪽이나남쪽으로 향할 때 나침반에 영향을 미친다.
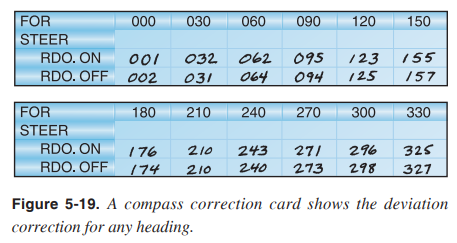
compensating magnets를 조정하여 나침반 지시와 실제magnetic heading의 차이를 최소화한다. AMT는 나머지 오류를compass correction card에 기록한 다음 이를 나침반 근처의 홀더에 넣는다. [그림 5-19]오직AMT만이 나침반을 조정하거나compass correction card를 작성할 수 있다.조종사는card에 기록된 자차를 통해compass headings를 결정 및 비행한다.또한 조종사는 자기 간섭을 일으키는 장비들(예를 들어 라디오, deicing equipment, pitot heat,레이더,혹은 자성을 띠는 화물)을 주의해야 한다.
자차와 편차는 아래와 같이true course부터 올바른 순서로 수정되어야 한다.
Step 1: Determine the Magnetic Course
True Course(180도) ± Variation(+10도) = Magnetic Course(190도)
적용할자차가 없다면 190도의magnetic course로 비행한다. 190도의 compass course를 위해선compass card를 반드시 고려해야 한다.
Step 2: Determine the Compass Course
Magnetic Course(step1의190도) ± Deviation(correction card의-2도) = Compass Course(188도)
NOTE: compass card에 나열된magnetic courses의 중간 값을 계산해야 한다.따라서true course 180을 비행하기 위해선compass course 188을 따라야 한다.
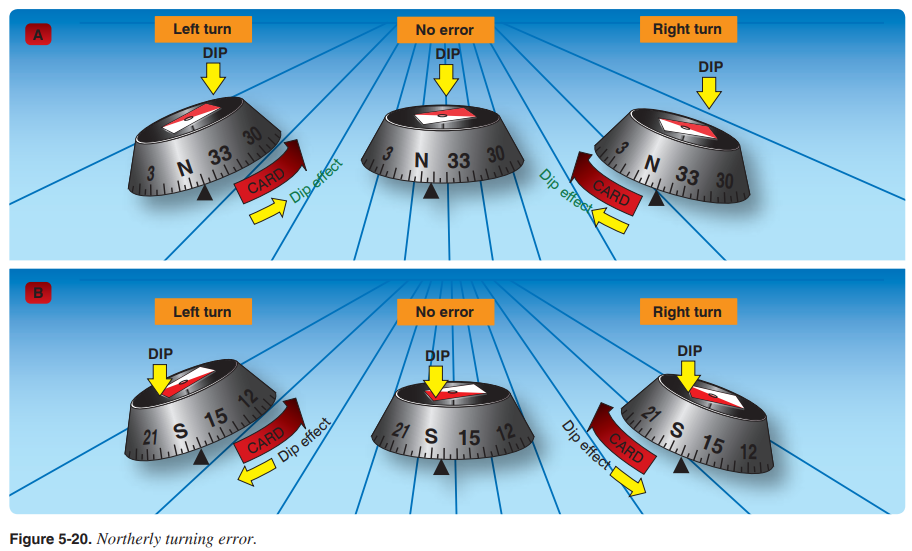
float assembly의 무게중심은 피벗점보다 낮다.비행기 선회 도중에는 복각으로 인한 힘 때문에float가 돌아가는 방향과 같은 쪽으로float assembly가 휙 움직인다. 이로 인해false northerly turn indication이 발생한다.이러한float assembly의 선도(lead) 오류 때문에 특정heading에 도달하기 전에northerly turn을 멈춰야 한다.이러한 나침반 오류는 극에 근접할수록 커진다.이러한 선도 오류를 보정하기 위한 한 가지rule of thumb는 위도의 절반에15도를 더한 지점에서 선회를 멈추는 것이다(만약 비행기가 위도40도주변을 비행하고 있다면 특정 heading에 도달하기15 + 20 = 35도 전에 선회를 멈춰야 한다.) [그림 5-20A]
Southerly Turning Errors
남쪽 방향으로 선회할 때 발생하는 힘들은compass float가 지연(lag)되게 만든다. 이로 인해 false southerly turn indication이 발생한다.선회를 멈추기 전에float assembly가 특정 heading을 통과할 수 있도록 해야 한다.이 오류 또한극에 근접할수록 커진다.지연 오류를 수정하기 위해서는 선회를 중단하기 전에 특정 heading을 통과해야 한다.위도의 절반에15를 더하는 규칙이 여기에도 적용된다(만약비행기가 위도30도주변을 비행하고 있다면 특정heading을 통과한 후15 + 15 = 30도 지점에서 선회를 멈춰야 한다). [그림 5-20B]
(출처: youtuube/flight-club)
Acceleration Error
동쪽/서쪽으로 향하는 도중에 가속/감속을 수행하면 복각과 관성으로 인해 나침반 오류가 발생한다. compass card는 펜던트처럼 장착되어있기 때문에 가속 도중에는compass card의 뒤쪽 끝이 위로 기울어지며 감속 도중에는 아래로 기울어진다.동쪽/서쪽으로 향하는 heading에서 가속을 수행하면 북쪽으로 향하여 선회한다는 잘못된 지시가 나타난다. 반면 동쪽/서쪽으로 향하는 heading에서감속을 수행하면 남쪽으로 향하여 선회한다는 잘못된 지시가 나타난다. “ANDS”(Acceleration-North/Deceleration-South)라는 단어가 가감속 오류를 기억하는데 도움이 될 수 있다. [그림 5-21]가속은 북쪽을 가리키고 감속은 남쪽을 가리킨다.
(출처:youtube/flight-club)
Oscillation Error
oscillation은 앞서 언급한 모든 오류들이 합쳐진 것이다. oscillation으로 인해 compass card는 현재 비행 중인heading의 주위를 오락가락 한다. gyroscopic heading indicator가magnetic compass와 정렬되도록 설정하는 경우에는 그 오락가락한 값들 사이의 평균치를 사용한다.
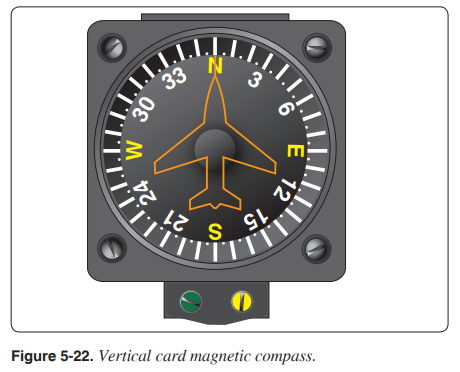
The Vertical Card Magnetic Compass
vertical card magnetic compass는 magnetic compass와 관련된 오류와 헷갈림을 다소 줄여준다.이 나침반의 눈금판은 기본 방위를 나타내는 문자,30도 단위의 숫자,그리고5도 단위의 눈금으로 표시된다.축에 장착된 자석에 의해 눈금판이 회전한다. 비행기 모형의기수는 항공기의heading을 읽기 위한lubber line을 나타낸다. vertical card magnetic compass에서는oscillating permanent magnet의 자속이damping disk에 와상전류를 생성한다.와상전류에 의해 생성된 자속은 영구 자석의 자속과 반대 방향으로 작용하여 oscillation을 감소시킨다. [그림 5-22]
The Flux gate Compass System
자기력선은 두 가지 중요한 특성은 가진다:자유롭게 회전하는 모든 자석은 자기력선에 연장됨,자기력선을 가로지르는 모든 전도체에는 전류가 유도됨.
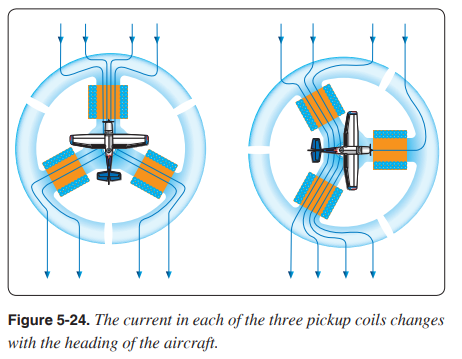
slaved gyro를 구동하는 flux gate compass는 전류가 유도되는 특성을 사용한다. flux valve란 그림 5-23과 같은 작은 고리리이며이는 연철로 이루어져 있기 때문에 자기력선을 쉽게 받아들일 수 있다. 지구 자기장에 의해 이 고리에 유도된 전류를 받아들이기 위해 세 개의 다리에 전기 코일이 감겨있다. 프레임 중앙의 iron spacer에 감긴 코일에는 400Hz의 교류(A.C.)가 흐른다. 전류가 최대 지점에 도달하였을 때에는(한 주기 당 두 번) 코일에서 생성되는 자성이 너무 많아져서 프레임이 지구 자기장의 자기력선을 받아들일 수 없다.
허나 최대 지점마다 전류가 역전되면서 프레임의 자성이 없어지며이를 통해 프레임은 지구 자기장의 자기력선을 받아들일 수 있다. 자기력선이 세 개의 코일을 가로지르면 코일 내에 전류가 흐른다. 이 세 개의 코일은 항공기의 heading 변화에 따라 코일 내에 흐르는 전류가 변하도록 연결된다. [그림 5-24]
이 세 개의 코일은 synchro 내의 코일들과 연결된다. synchro는 RMI(radio magnetic indicator)나HSI(horizontal situation indicator)의 다이얼을 회전시킨다.
Remote Indicating Compass
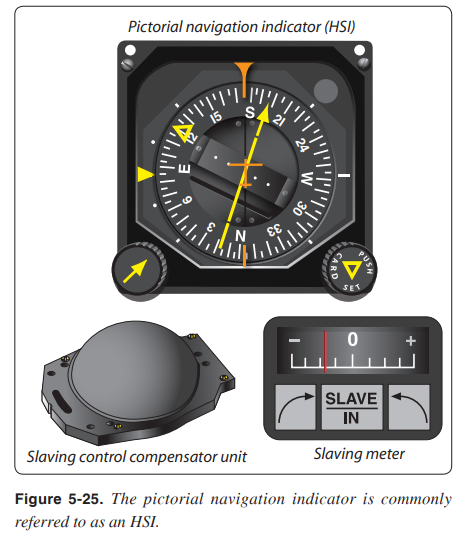
오래된 유형의 heading indicators에서 발생하는 오류와 한계를 보완하기 위해 remote indicating compass가 개발되었다. 이는 보통 pictorial navigation indicator와slaving control and compensator unit으로 구성된다. [그림 5-25] pictorial navigation indicator는 보통 HSI라 불린다.
slaving control and compensator unit에는 “slaved gyro”나“free gyro”를 선택할 수 있는 버튼이 있다. 또한 이 장치에는 slaving meter와 두 개의 manual heading-drive button이 있다. slaving meter는 현재 표시되는 heading과 magnetic heading의 차이를 나타낸다. right deflection은 compass card의 시계방향 오류를 나타내며 left deflection은 반시계방향 오류를 나타낸다. 항공기가 선회를 수행하여 card가 회전할 때마다 slaving meter는 한 쪽으로 full deflection을 나타낸다. 시스템이 “free gyro” 모드에 있을 때에는 적절한 heading-drive 버튼을 눌러서 compass card를 조정할 수 있다.
별도의 장치인 magnetic slaving transmitter는 자기 간섭의 가능성을 없애기 위해 따로 장착된다(보통 wingtip에 장착됨). 여기에는 시스템의 방향 감지 장치인 flux valve가 포함되어 있다. 자기력선들은 증폭된 후에 heading indicator unit로 전달되는 신호가 된다. 이 신호는 heading indicator의 토크 모터를 작동시켜서 heading indicator가transmitter 신호와 정렬되도록 만든다. magnetic slaving transmitter는 HSI에 전기적으로 연결된다.
remote indicating compass에는 여러 가지 종류가 있으므로 여기서는 시스템의 기본적인 특징만이 다루어진다. 계기 조종사는 항공기에 설치된 장비의 특성을 숙지해야 한다.
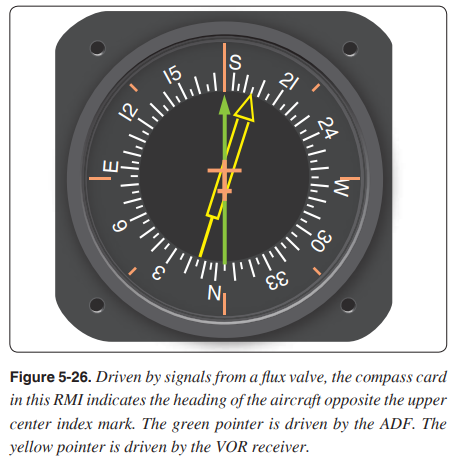
계기판은 점점 복잡해지고 조종사의 업무량은 증가하여계기 제조업체들은 계기들을 결합하기 위하여 노력하였다. 이에 대한 한 가지 좋은 예시는 RMI이다. [그림 5-26] compass card는 flux valve에 의해 작동하며 두 개의 지시침은 ADF(automatic direction finder)와 VOR(very high frequency omnidirectional range)에 의해 작동한다.
자이로스코프 계기 시스템과 자이로스코프 특성(공간 강성과 세차)을 사용하면 자연 수평선을 참조하지 않고도 비행을 안전하게 수행할 수 있다. 이러한 시스템에는 attitude instrument, heading instrument, 그리고 rate instrument가 포함된다. 이 계기들은 자이로스코프(무게가 주변부에 집중된 작은 바퀴)를 가지고 있다. 이 바퀴가 빠른 속도로 회전하면 잘 휘지 않는 상태가 되어서 회전축으로부터 다른 방향으로 기울어지는 것에 저항한다.
attitude와 heading instruments는 공간 강성(rigidity)의 원리로 작동한다. 이러한 계기에서 자이로는 계기 케이스 내부에서 공간 강성을 유지하며 항공기가 이 주위를 회전한다. rate indicators(예를 들어 turn indicators와turn coordinators)는 세차(precession)의 원리로 작동한다. 이 경우에는 항공기가 하나 이상의 축을 회전하는 속도에 비례해서 자이로가 기울어진다.
(출처: youtube/flight-club)
Power Sources
항공기 제조업체와 계기 제조업체는 비행 계기들에 다중(redundancy) 시스템을 설계하였다. 이는 하나의 고장으로 인해 조종사가 안전하게 비행할 수 있는 능력이 상실되지 않게 만들기 위함이다. 자이로스코프 계기들은 계기 비행에 있어 매우 중요하므로 이들은 서로 다른 전원을 통해 구동된다.
Pneumatic Systems
공압식 자이로는 바퀴 주변에 부딪히는 공기 흐름에 의해 구동된다.vacuum source를 통해 계기 케이스를 비워낸 다음 노즐을 통해 여과 공기가 케이스로 들어오면 바퀴가 회전한다.
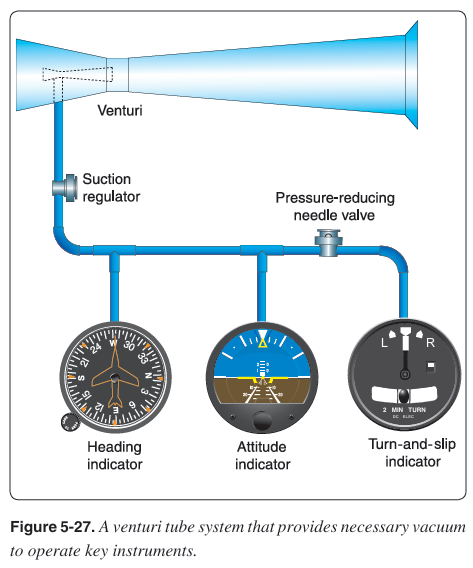
Venturi Tube Systems
계기 케이스를 비워내기 위한 공압 펌프가 없는 경우에는 항공기 외부에 장착된 벤투리관을 사용할 수 있다. [그림 5-27] 벤투리관을 통과하는 공기는 가장 좁은 부분에서 속도가 빨라지고 압력이 떨어진다(베르누이의 원리). 이 가장 좁은 부분이 관을 통해 계기 케이스와 연결된다. attitude indicator와 heading indicator는 대략 4˝Hg의 흡입력으로 작동한다. 반면 turn-and-slip indicator는 2˝Hg만을 필요로 하므로 흡입력을 줄이기 위해 pressure-reducing needle valve가 사용된다. 공기는 계기 케이스에 내장된 필터를 거친 후에 계기로 유입된다. 이 시스템에서는 얼음이 벤투리관을 막아서 계기를 멈추게 만들 수 있다.
Vacuum Pump Systems
Wet-Type Vacuum Pump
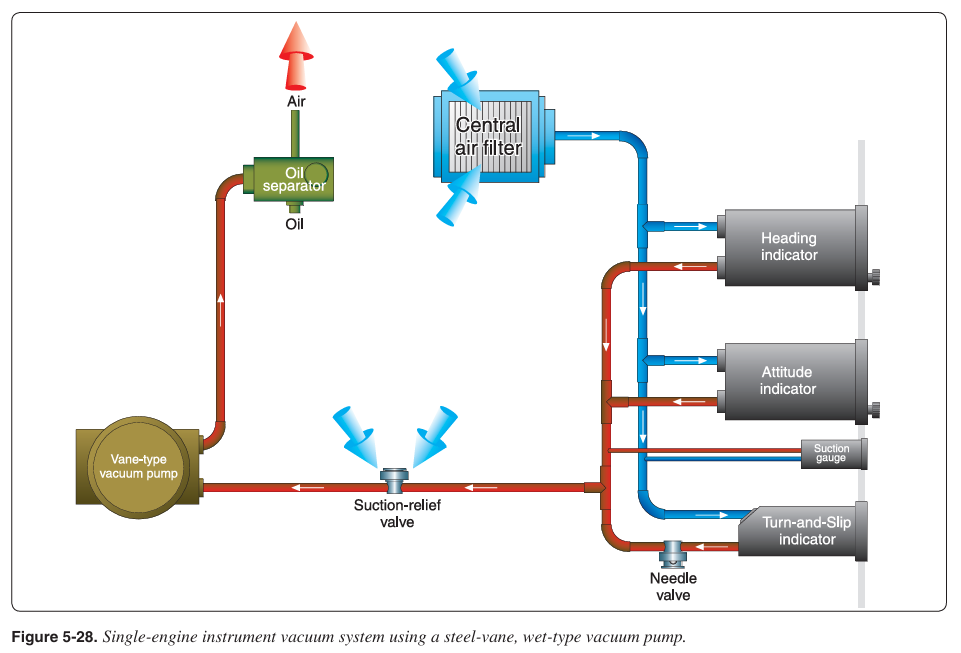
계기 케이스를 비워내기 위해 steel-vane air pumps가 수년간 사용되어왔다. 이러한 펌프의 관들은 소량의 엔진 오일에 의해 윤활되며 이후 오일은 공기와 함께 배출된다. 일부 항공기에서는 배출 공기가 날개와 미익 앞전(empennage leading edges)의 rubber deicer boots를 팽창하는데 사용된다. 오일이 rubber boots를 악화시키지 않도록 하려면 oil separator를 통해 오일이 제어되어야 한다. [그림 5-28]
(rubber deicer boots)
vacuum pump는 계기들이 필요로하는 공기보다 더 많은 양의 공기를 이동시키므로 suction-relief valve가 펌프의 입구 쪽에 설치된다. 스프링이 장착된 이 밸브는 계기 내부에 필요한 저압이 유지될 정도로 공기를 빨아들인다. central air filter에서 여과된 공기는 계기 케이스로 유입된다. 항공기가 비교적 낮은 고도를 비행하는 한 자이로를 빠른 속도로 회전시키기에 충분한 공기가 계기 케이스로 유입된다.
Dry Air Vacuum Pump
비행 고도가 증가하면 공기 밀도가 낮아지므로 더 많은 공기가 계기를 통과하도록 해야 한다. 높은 고도를 비행하는 항공기에서는 배출 공기와 오일을 섞지 않는 air pump가 사용된다. steel vanes가 steel housing 내부를 움직일 때에는 윤활이 필요하다. 허나 특수한 carbon vane이 carbon housing내부를 움직일 때에는 마모가 발생하면서 미세한 양의 자체 윤활이 제공된다.
Pressure Indicating Systems
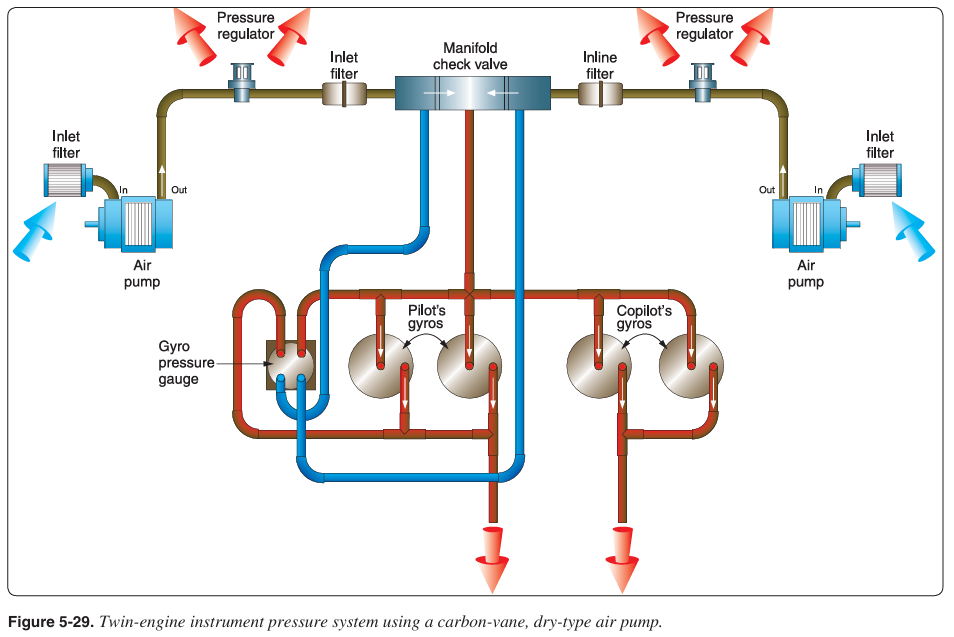
그림 5-29는 다발 범용 항공 비행기의 공압 시스템 계기를 보여준다. 오염물이 carbon vanes를 손상시키는 것을 막기 위해 두 개의 dry air pump 입구에 필터가 장착된다. 펌프를 통과한 공기는 regulator로 향한다. regulator는 과도한 공기를 빼내서 시스템 내 압력을 적절한 수준으로 유지한다. regulator를 통과한 공기는inline filters로 향한다. 이 필터는 펌프에서 유입될 수 있는 오염 물질을 제거한다. 필터를 통과한 공기는manifold check valve로 향한다다. 엔진 중 하나가 고장장났거나 펌프 중 하나가 고장나면 check valve가 고장난 시스템을 차단하며 계기는 남은 시스템을 통해 작동된다. 계기를 통과해서 자이로를 구동한 공기는 케이스로부터 배출된다. gyro pressure gauge는 모든 계기들을 가로질러서 압력 강하를 측정한다.
Electrical Systems
공압식 attitude indicator를 사용하는 범용항공 항공기는 보통 전기식 rate indicators를 사용하거나 그 반대이다. 다이얼에 그 전원을 나타내는 계기들도 있긴 하지만 조종사는 POH/AFM을 통해 모든 계기들의 전원을 알아야 한다. 이는 계기 고장 발생시 어떤 조치를 취해야 하는지를 알기 위해서이다. 직류(D.C.) 전자 계기들은 항공기 전기 시스템에 따라 14-volt 모델이나28-volt 모델에서 사용될 수 있다. 몇몇attitude gyros와 autopilots는 작동을 위해 교류(A.C.)를 사용한다. 직류 전기 시스템만을 갖춘 항공기의 경우 DC-AC 변환 장치(14-volt나28-volt 직류를3상115-volt, 400-Hz A.C.로 변환하는 장치)가 설치되면 교류 계기를 사용할 수 있다.
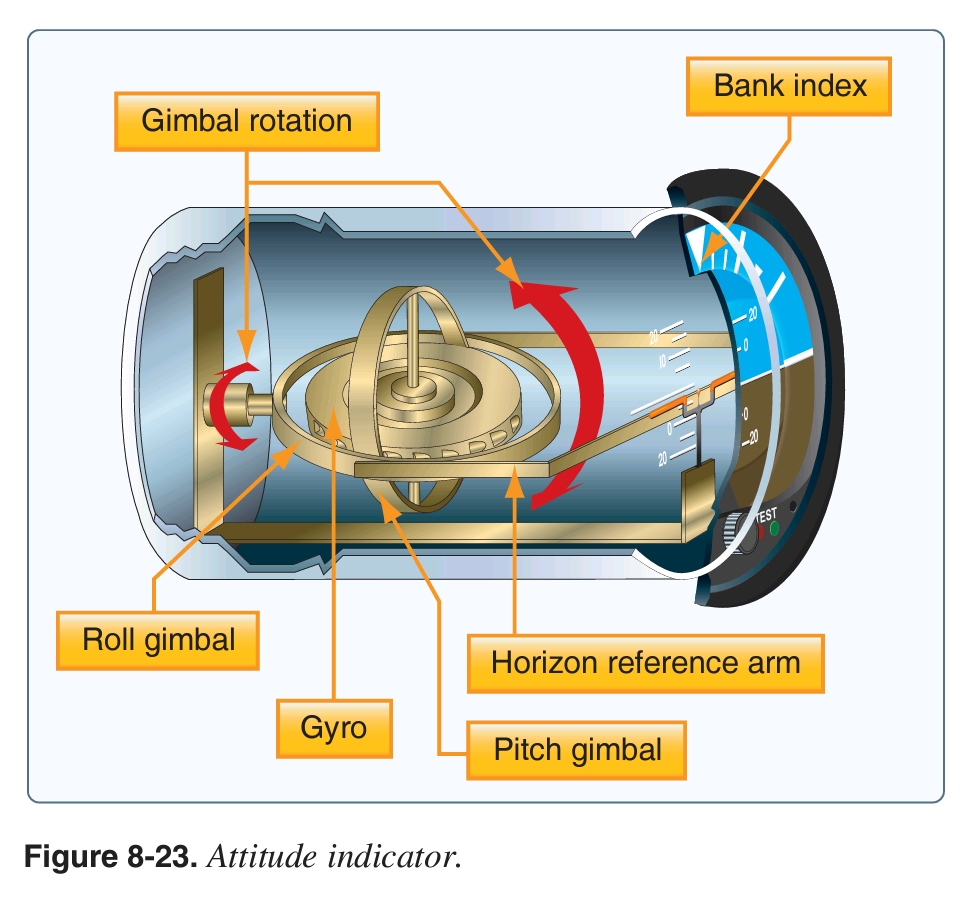
최초의 AI(attitude instrument)는 artificial horizon이라 불렸으며 이후에는 gyro horizon이라 불렸다. 이제 attitude instrument는attitude indicator라 불린다. 자세계에는 수직 회전축을 가진 작은 바퀴가 있는데 이는 공기 흐름이나 전기 모터에 의해 빠른 속도로 회전한다. 자이로에는 double gimbal이 설치되며 이 덕분에 자이로가 공간 강성을 유지하는 동안 항공기가 자이로를 중심으로 pitch/roll을 수행할 수 있다.
(출처: PHAK)
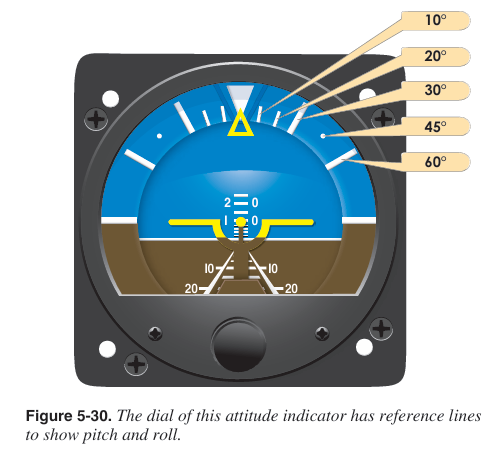
horizon disk는gimbals에 부착되서 자이로와 동일한 평면을 유지하며항공기는 이를 중심으로 pitch/roll을 수행한다. 최초의 계기에서 horizon disk는 수평선을 나타내는 막대에 불과하였으나 지금은 수평선을 나타내는 선뿐만 아니라 pitch marks와bank-angle lines도 가진다. 계기 다이얼 및 horizon disk의 위쪽 절반은 파란색(하늘을 나타냄)이며 아래쪽 절반은 갈색(지상을 나타냄)이다. 계기 상단의 bank index는 bank angle을 10도, 20도, 30도, 45도, 그리고 60도로 나타낸다. [그림 5-30]
작은 symbolic aircraft가 계기 케이스에 장착되어 있으며 이는 수평선에 대해 비행하는 것처럼 보이게 된다. 계기 케이스 하단 중앙의 knob로symbolic aircraft를 올리거나 내리면 속도 변화에 따른 pitch trim 변화를 보상할 수 있다. symbolic aircraft의 날개폭과 날개 중앙의 점은 대략 2도의 pitch 변화를 나타낸다.
자세계가 제대로 작동하기 위해선 항공기가 자이로를 중심으로 roll/pitch 하는 동안 자이로가 수직 상태를 유지해야 한다. 이러한 계기의 베어링들은 가장 작은 마찰을 가지지만그 작은 양의 마찰만으로도 자이로에 제한이 가해져서 세차가 발생하며 결국 자이로가 기울어진다. 이렇게 자이로가 기울어지는 것을 최소화하기 위해 계기 케이스 내부의 erection mechanism은 자이로가 수직 위치에서 기울어질 때마다 힘을 가한다. 이러한 힘은 회전 바퀴가 수직 위치로 돌아오도록 작용한다.
오래된 artificial horizon은 pitch나 roll이 제한되어 있었다(보통 60도 pitch 및100도 roll). 이러한 한계가 초과되면 자이로 하우징이 gimbals와 닿아 자이로를 tumble시킬 정도로 세차를 가한다. 때문에 이러한 계기들은 자이로를 수직 위치에 고정시키는 caging mechanism을 가지고 있다. 최신 계기들은 이러한 한계를 가지지 않으므로 caging mechanism이 없다.
항공기 엔진이 막 시동된 후 계기에 공압이나 전력이 공급될 때에는 자이로가 수직 위치로 서지 않는다. 중력에 의해 작동하는 계기 내 self erecting mechanism이 자이로가 수직 위치로 서도록 세차를 가한다. 이 과정은 최대5분까지 걸릴 수 있다(허나 보통 2 ~3분 내에 완료됨).
자세계는 대부분의 오차들로부터 자유롭긴 하지만erection system이 작용하는 속도에 따라 약간의 오차들이 발생할 수 있다(급가속 도중에는 약간의 nose-up 지시가, 그리고 급감속 도중에는 약간의 nose-down 지시가 발생할 수 있음). 또한 180도 선회 이후 약간의 bank angle 오차와pitch 오차가 발생할 수 있다. 허나 이러한 오차들은 매우 작으며 직진수평비행으로 돌아온 후 1분 이내에 자체적으로 수정된다.
Heading Indicators
magnetic compass는 매우 신뢰할 수 있는 계기이며 예비 계기로 사용된다. 허나 나침반은 너무 많은 오류를 가지고 있어서 gyroscopic heading indicator로 보완되었다.
heading indicator의 자이로도 attitude indicator와 마찬가지로 double gimbal을 갖추고 있으나 그 회전축이 수평으로 설치되어 있어서 항공기 수직축을 중심으로 발생하는 회전을 감지할 수 있다. gyro heading indicators는 자북으로 향하지 않으므로 이 계기를 자기 나침반과 비교해서 적절한 heading을 직접 설정해야 한다(단, slaved gyro indicators제외).공간 강성 덕분에 나침반의 oscillation 오차와 그 외 오차들 없이 heading을 유지할 수 있다.
(출처: FAA PHAK)
구형 directional gyros는 drum-like card를 사용하는데이는 magnetic compass card와 동일한 방식으로 표시된다. gyro와 card는 계기 케이스 내에 고정되어 있으며 조종사는 이러한 card의 뒷면을 바라본다. 이는 자기 나침반을 사용할 때와 마찬가지로 조종사가 잘못된 방향으로 선회할 가능성을 만들어낸다. 계기의 아래에 있는 knob를 눌러서 gimbals를 체결할 수 있다. 이렇게 하면 gimbal이 고정되며 조종사는 lubber line의 숫자가 자기 나침반과 일치할 때까지 gyro와 card를 회전시킬 수 있다. knob를 잡아당기면 자이로가 고정되어서 항공기가 card를 중심으로 자유롭게 회전할 수 있다.
(구형 directional gyros)
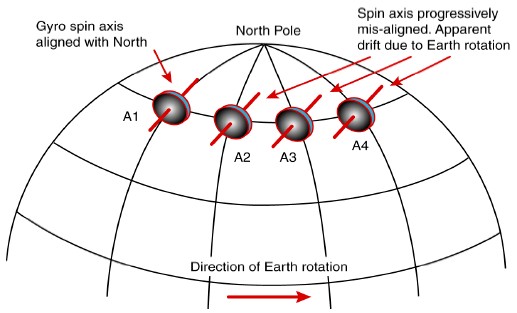
directional gyros는 거의 대부분 공압으로 작동한다(공기가 비워진 계기 케이스 내에 여과 공기가 들어와 자이로 바퀴를 회전시킨 후 배출됨). 자이로가 우주를 기준으로 위치를 유지하는 동안 지구는 시간 당 15도의 속도로 계속 자전하며이로 인해 계기에 표시된 heading에 시간 당 15도의 apparent drift가 발생한다. 이러한 계기를 사용하는 경우에는 적어도 15분마다 directional gyro에 표시된 heading을 자기 나침반과 비교한 다음 heading을 자기 나침반에 일치시켜야 한다.
(Apparent drift)
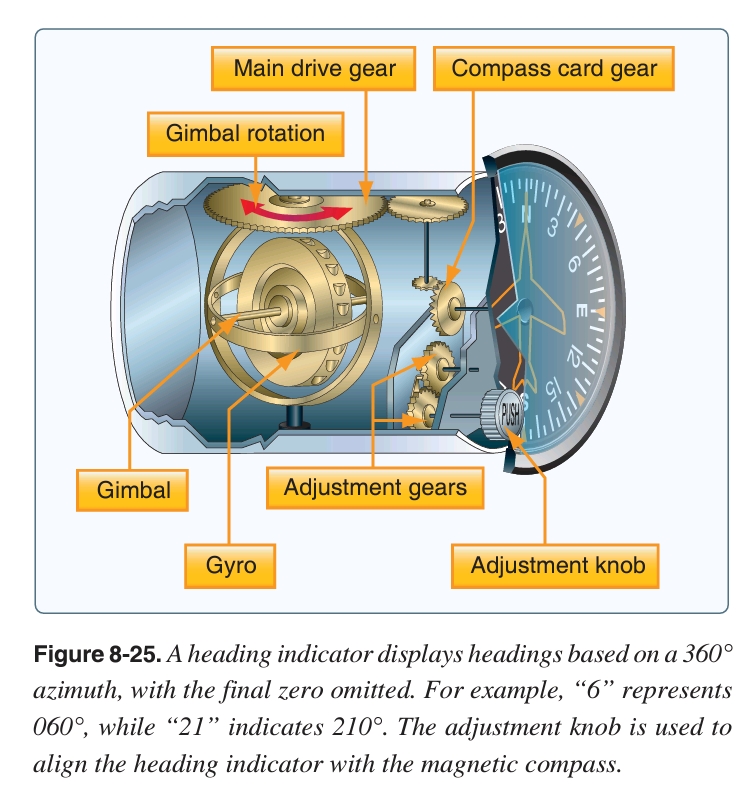
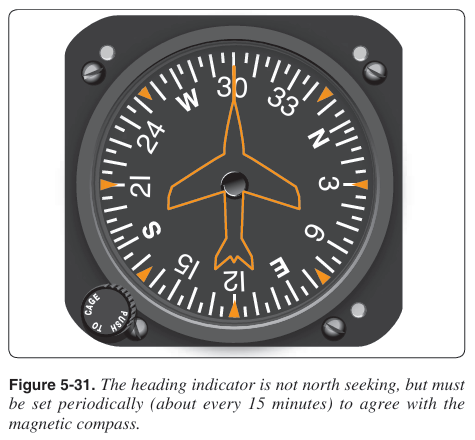
그림 5-31의 heading indicators는 구형 horizontal card indicators와 동일한 원리로 작동하지만 여기서는자이로가 vertical dial을 구동한다. 항공기의 heading은 symbolic aircraft의 기수를 통해 표시된다. 계기 전면의 knob를 누른 다음 이를 돌리면 자이로와 다이얼을 회전시킬 수 있다. knob에 장착된 스프링 때문에 knob를 놓자마자 gimbal이 분리된다. 약 15분마다 이 계기와 자기 나침반이 일치하는지 확인해야 한다.
Turn Indicators
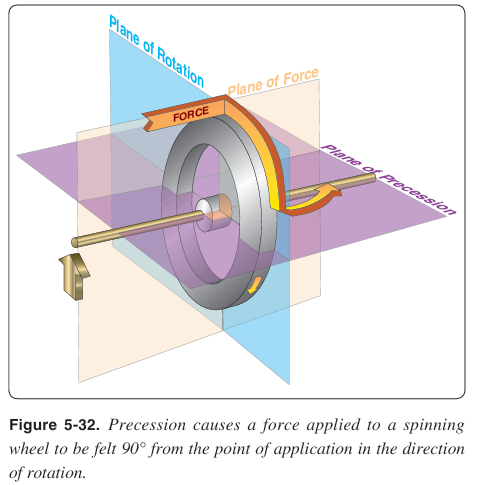
attitude indicators와 heading indicators는 공간 강성의 원리로 작동하지만rate instruments(예를 들어 turn-and-slip indicator)는 세차의 원리로 작동한다. 세차란 적용된 힘이 작용 지점이 아닌 작용 지점으로부터 90도(회전 방향) 지점에서 움직임을 발생시키는 자이로 특성이다. [그림 5-32]
Turn-and-slip Indicator
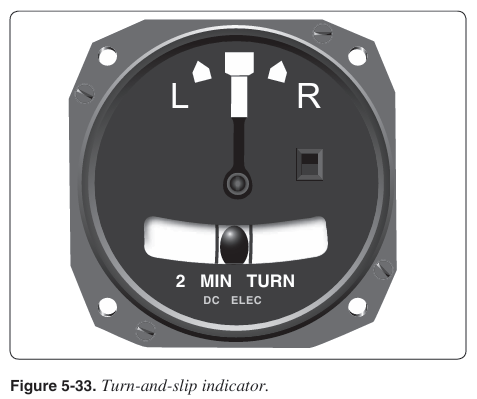
최초의 자이로 계기는 needle과 ball로 구성된 선회 지시계로 이는turn-and-bank indicator라 불렸다. 최근에는 이 계기를 turn-and-slip indicator라 부른다. [그림 5-33]
inclinometer는 곡선형 유리 튜브 안에 밀봉된 검은색 유리 ball이다. 감쇄를 위해 유리 튜브의 일부는 액체로 채워져 있다. 이 ball은 중력, 그리고 선회에 의한 관성력의 상대적 강도를 측정한다. 항공기가 직진수평비행을 할 때에는 ball에 작용하는 관성이 없으므로ball이 유리 튜브의 중앙에 위치한다. 선회율에 비해 너무 많은bank angle이 사용되면 중력이 관성력보다 커져서 ball이 선회 안쪽으로 굴러 내려온다. 선회율에 비해 너무 적은bank angle이 사용되면 관성력이 중력보다 커져서 ball이 선회 바깥으로 굴러 올라간다.
(출처: FAA PHAK)
inclinometer는 bank의 양을 나타내지 않으며 slip도 나타내지 않는다. inclinometer는 오직 bank angle과 rate of yaw 사이의 관계를 나타낸다.
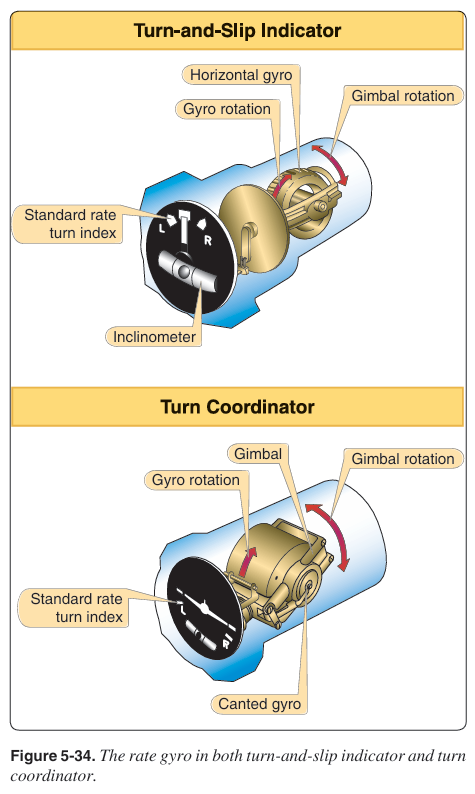
turn indicator는 공기나 전기 모터에 의해 회전하는 작은 자이로이다. 자이로는 single gimbal에 설치된다. gyro의 회전축은 항공기의 가로축에 평행하고 gimbal의 회전축은 항공기의 세로축에 평행하다. [그림 5-34] 항공기가 yaw를 하거나 수직축을 중심으로 회전하면 자이로 바퀴에 힘이 발생하는데이때 세차로 인하여 gyro와 gimbal이 gimbal 축을 중심으로 회전한다. 이러한 회전은 calibration spring에 의해 제어된다. 덕분에항공기가 표준율 선회를 할 때 gyro와 gimbal은 다이얼의 doghouse-shaped marks와 지시침이 정렬될 정도로 회전한다.
이러한 계기의 다이얼에는 “2 MIN TURN.”이 표시된다. 더 빠른 항공기에서 사용되는 일부 turn-and-slip indicators는 “4 MIN TURN.”이 표시되어 있다. 두 계기 모두 지시침이 doghouse와 정렬되었을 때 표준율 선회를 나타낸다. 표준율 선회란 초당 3도의 선회이다. 2분짜리 계기에서 지시침이 doghouse에 정렬되면 초당 3도의 선회가 이루어지며360도 선회를 수행하는데 2분이 소요된다. 4분짜리 계기에서 초당 3도의 선회를 수행하려면 지시침을 두 배 더 편향시켜야 한다.
Turn Coordinator
turn-and-slip indicators의 가장 큰 한계는 항공기 수직축에 대한 회전만을 감지한다는 것이다. turn-and-slip indicators는 세로축에 대한 회전(항공기가 선회를 시작하기 전에 발생하는 움직임)은 표시하지 않는다.
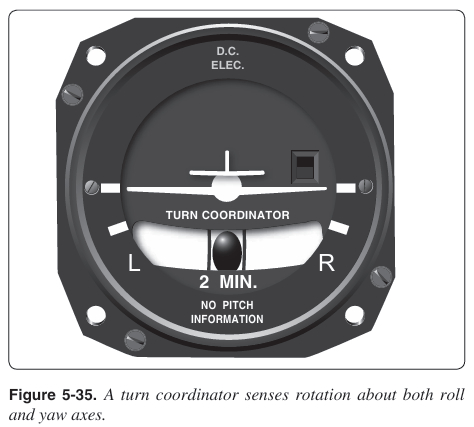
turn coordinator 또한 세차에 의해 작동한다. 허나 이는 turn indicator와 달리 gimbal의 프레임이 항공기 세로축으로부터 위쪽으로 약 30도 각을 이룬다. [그림 5-34] 이를 통해 turn coordinator는 roll과yaw를 모두 감지할 수 있다. 따라서 turn coordinator는 선회 도중 먼저 bank rate(bank가 가해지는 속도)를 나타내며 이후 선회가 안정되면 turn rate를 나타낸다. 일부 turn coordinator gyro는 dual-powered로 작동해서 공기나 전기 중 어느 하나로 구동될 수 있다.
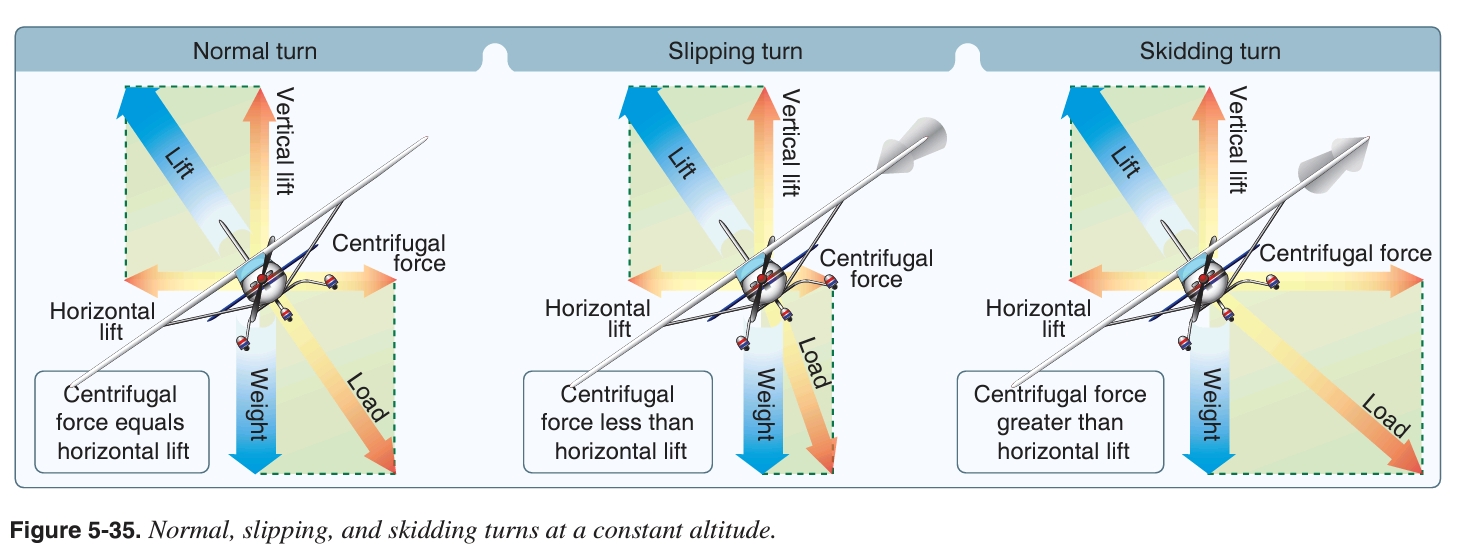
turn coordinator는 turn-and-slip indicator와 달리 지시침을 사용하지 않으며 대신 gimbal이 다이얼(symbolic aircraft의 뒷면)을 움직인다. 계기의 베젤은 수평 비행 상태와 표준율 선회 상태를 나타내도록 표시된다. [그림 5-35]
turn coordinator의 inclinometer를 coordination ball이라 부르며 이는 bank angle과 yaw rate 사이의 관계를 표시한다. 선회 도중 ball이 중앙에 있으면 삼타일치가 유지된다. ball이 선회 바깥쪽으로 굴러가면 항공기는 skid를 수행하고 ball이 선회 안쪽으로 굴러가면 항공기는 slip을 수행한다. turn coordinator는 pitch를 감지하지 않는다. 이를 나타내기 위해 일부 계기들의 다이얼에는 “NO PITCH INFORMATION”라 적혀있다.
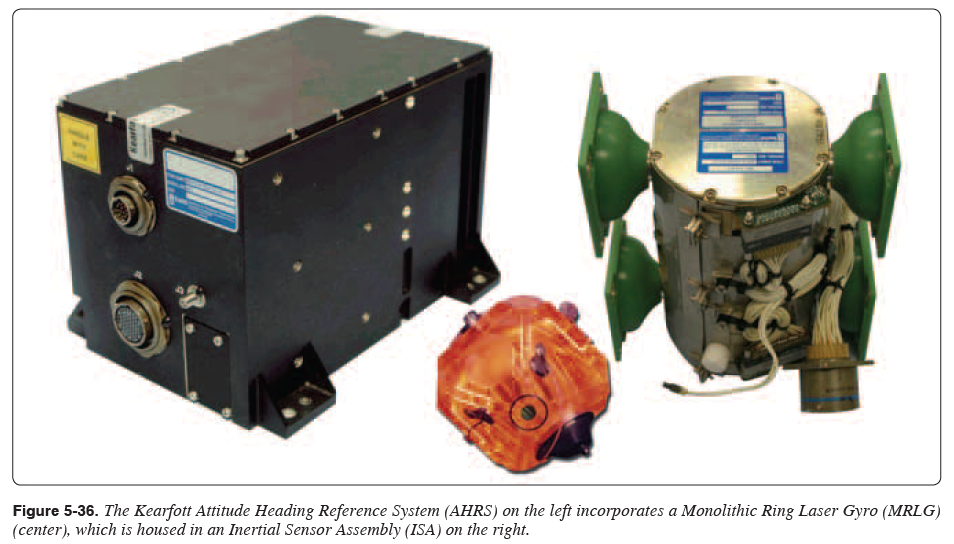
항공기 디스플레이가 새로운 기술로 전환되면서 계기들 또한 상당히 변화하였다. 기존의 자이로스코프 계기들은 AHRS(Attitude and Heading Reference Systems)로 대체되었다. 이 덕분에 신뢰성이 향상되었으며 비용 및 유지보수가 감소되었다.
AHRS의 기능은 자이로스코프 시스템의 기능과 동일하다(즉 어느 쪽이 수평 자세인지, 그리고 어느 쪽이 북쪽인지를 결정함). AHRS는 initial heading을 파악함으로써 항공기의 attitude와 magnetic heading을 결정할 수 있다. [그림5-36]
AHRS 시스템이 각각의 자이로스코프(예를 들어 attitude indicator, magnetic heading indicator, 그리고 turn indicator)를 대체하였기 때문에 이러한 개별 시스템들은 더 이상 필요하지 않다. 오늘날 AHRS는 더욱 발전하였다. 초기의 AHRS 시스템은 값비싼 inertial sensors와 flux valve를 사용했었다. 그러나 오늘날의AHRS는 다양한 기술들을(예를 들어 값싼 inertial sensors, rate gyros, 그리고 magnetometers) 통합한 소형 반도체 시스템으로이는 위성 신호 수신 기능을 가지고 있다.
Air Data Computer(ADC)
ADC란 고도, IAS, TAS, 그리고 공기 온도를 정확하게 계산하기 위해 동압, 정압, 그리고 온도를 수신 및 처리하는 항공기 컴퓨터이다. ADC는 이러한 정보들을 디지털 형식으로 출력하여 다양한 항공기 시스템들이 사용할 수 있게 만든다(예를 들어 EFIS). 현대의 ADC는 작은 반도체 장치이다. autopilots, pressurization,그리고FMS와 같은 항공기 시스템들이 정상 작동을 위해 ADC를 활용하는 경우가 점점 더 많아지고 있다.
NOTE: 현대의 범용 항공 시스템들의 대부분은 AHRS와 ADC를 전자식 디스플레이에 통합한다. 이는 장치의 수를 줄여주고, 무게를 감소시키며, 비용을 절감해준다.