이전 장에서는 계기 비행의 기초를 다졌다. 항공기를 조종하고 안전한 비행을 유지하기 위해서는 조종사가 계기 정보를 해석하고 수정 조치를 적용할 수 있어야 한다. 조종사는 항공기 모델마다 서로 다른 기술이 필요할 수 있다는 것을 인지해야 한다. 성공적인 자세 계기 비행을 위해선 항공기 무게, 속도, 그리고 외장 변화에 따라 서로 다른 기술을 적용해야 한다. 조종사는 비행 기동을 수행하기 전에 POH/AFM의 모든 sections를 숙지해야 한다.
Chapter 7, Section II는 기본 자세 계기 비행 기동들을 서술하고EFD(electronic flight display)에 표시되는 지시들을 해석해서 각 비행 기동을 수행하는 방법을 설명한다. 정상 비행 기동뿐만 아니라 “partial panel” flight도 다루어진다. instrument takeoff를 제외한 모든 비행 기동들은 AHRS(Attitude Heading Reference System)가 작동하지 않는 상태에서 “partial panel”로 수행될 수 있다.
pitch attitude란 비행기의 세로축과 실제 수평선 사이의 각도를 의미한다. 수평 비행을 위한 pitch attitude는 속도와 하중에 따라 달라진다. 훈련 목적을 위해 소형 비행기에서는 보통 하중을 무시할 수 있다. 특정 속도에서 수평 비행을 수행하기 위한 pitch attitude는 하나뿐이다. 느린 순항 속도에서는 수평 비행 자세가 그림 7-47과 같이 높고빠른 순항 속도에서는 수평 비행 자세가 낮다. [그림 7-48] 그림 7-49는 정상 순항 속도에서의 자세 지시들을 보여준다.
PFD에서 pitch를 직간접적으로 표시하는 계기는 자세계, 고도계, 승강계, 속도계, 그리고 airspeed trend indicators와 altitude trend indicators이다.
Attitude Indicator
자세계는 조종사에게 직접적으로 pitch attitude를 제공한다. EFD system에서 자세계 화면이 커짐에 따라 조종사의 상황 인식이 크게 향상되었다. 대부분의 자세계는 PFD 화면의 전체 폭에 걸쳐 있다.
항공기의 pitch attitude는 elevator로 제어된다. 조종사가 조종간을 당겨서 elevator가 높아지면 AHRS가 지구 세로 평면과 항공기 세로축 사이의 각도 변화를 감지해서 yellow chevron이 인공 수평선으로부터 위로 움직이기 시작한다.
PFD 화면에 표시되는 자세계는 외부의 시각적 단서들을 나타낸다. 조종사는 자연 수평선 대신 PFD 화면의 인공 수평선에 의존해야 한다.
정상 순항 속도에서는 yellow chevron(aircraft symbol)이 인공 수평선에 위치한다. 종래의 자세계와 달리 EFD에서는 인공 수평선에 대한 chevron의 위치를 조작할 수 없다. chevron의 위치는 고정되어 있으며 항상 AHRS에 의해 계산된 pitch 각도를 표시한다.
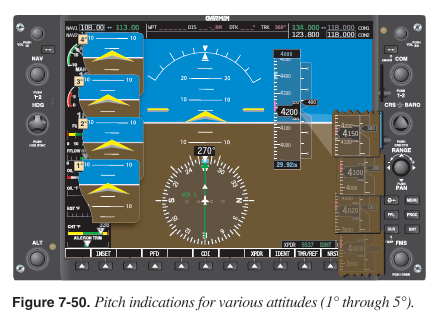
자세계는 pitch attitude만을 표시하며 고도는 표시하지 않는다. 조종사는 자세계만으로 수평 비행을 유지하려 시도해서는 안 된다. 조종사는 pitch를 위아래로 조금만 움직여도 항공기 고도가 얼마나 영향을 받을 수 있는지를 이해해야 한다. 이를 위해 조종사는 pitch attitude를 점진적으로 높이는 연습을 해서 pitch가 1도 변화할 때마다 고도가 어떻게 변화하는지에 익숙해져야 한다. 그림 7-50과 7-51에서 항공기는 감속하고 고도는 높아진다.
chevron의 높이는 대략 5도이며 이는 pitch를 조절하기 위한 정확한 기준을 제공한다. 자세계를 통해 pitch 변화를 만든 다음 과도한 조종간 압력을 trim 하는 것이 중요하다. 조종간 압력을 완화하면 비행이 더 안정적이게 되고 조종사의 업무량이 줄어든다. trim이 완료되었다면 조종사는elevator압력을 부드럽고 정확하게 조작해서pitch attitude를 변경해야 한다.
elevator를 부드럽게 조작하는 능력을 익히기 위해서는 조종간을 가볍게 쥐는 방법을 터득해야 한다. 일반적으로 엄지와 두 개의 손가락만으로도 조종간을 움직이기에 충분하다. 조종사는 조종간을 꽉 움켜쥐는 것을 피해야 한다. 조종사가 조종간을 꽉 쥐면 과도한 압력이 가해져서 항공기 자세가 바뀌는 경향이 있다.
정확한 수정을 수행할 수 있을 때까지 부드럽고 작은 pitch 변화를 연습한다. 연습을 통해 조종사는 1도 단위로 pitch를 변경해서 항공기 자세를 원활하게 제어할 수 있다.
elevator 조작을 마스터하는 마지막 단계는 trim이다. 부드러운 자세 계기 비행을 위해서는 항공기를 trim 해서 조종간 압력을 완화하는 것이 필수적이다. 이를 위해 조종간을 잠시 놓아준 다음pitch attitude가 움직이려는 방향을 확인한다. 그런 다음 조종간을 다시 쥐고 압력을 가해서 원래의 자세로 되돌린다. 조종간 압력이 가해진 방향으로 trim을 적용한다. trim을 약간만 적용해도 pitch attitude가 크게 변화하므로조급하게 굴지 말고 trim을 여러 번 적용한다.
항공기 trim이 완료되었으면 조종간 압력을 최대한 풀어준다. 조종간에 압력이 가해지면 elevator와 ailerons에 무의식적으로 압력이 가해지며이는 원하는 비행경로로부터 항공기를 벗어나게 만든다. 잔잔하고 난기류가 없는 상태에서 trim이 완료되면 조종사는 조종간을 놓고도 수평비행을 장시간 유지할 수 있다. trim은 IMC(instrument meteorological conditions)를 성공적으로 비행하기 전에 배우는 어려운 기술들 중 하나이다.
Altimeter
출력이 일정할 때 수평비행으로부터 편차가 발생하였다면 pitch가 변화된 것이다(단, 난기류 조건 제외). 만약 출력이 일정하다면 고도계는 수평 비행에 대한 pitch attitude를 간접적으로 나타낸다. 비행기가 수평 비행을 하고 있다면 고도가 일정하게 유지되어야 한다. 따라서 원하는 고도로부터 벗어났다면 pitch 변화가 필요한 것이다. 예를 들어 항공기 고도가 높아지고 있다면 기수를 낮추어야 한다.
PFD의 pitch가 변화하기 시작하면 altitude tape의 altitude trend indicator가 변화를 나타내기 시작한다. trend indicator가 증가하는 속도와 고도계 값의 변화는 얼마나 많은 pitch 변화가 필요한지 판단하는데 도움을 준다.
조종사가 특정 항공기의 계기에 익숙해지면 pitch changes, altimeter tapes, 그리고 altitude trend indicators를 상호 연관시키는 방법을 배우게 된다.altitude tape와 altitude trend indicator를 자세계와 함께scan 함으로써 조종사의 계기 cross-check이 발달하기 시작한다.
Partial Panel Flight
연습해야 할 한 가지 중요한 기술은 고도계를 primary pitch indicator로 참조하는 partial panel flight이다. 자세계를 사용하지 않고 altitude tape와 trend indicator만을 참조해서 pitch를 조작하는 연습을 한다. 조종사는 altitude tape와 trend indicator의 변화율을 참조해서 고도 편차를 수정하는 방법을 배워야 한다. IMC에서 비행할 때, 그리고 partial panel로 비행할 때에는 갑작스러운 조종간 변화를 피해야 한다. 고도 변화에 갑작스럽게 반응하면 pitch 변화가 커져서 초기 고도로부터 훨씬 벗어날 수 있다.
조종사가 altitude tape와 altitude trend indicators만 사용해서 pitch를 조작하면 필요 이상의 pitch 수정을 가해서 항공기를 과조작할 수 있다. 과조작으로 인해 조종사가 항공기를 nose-high attitude에서 nose-low attitude로(혹은 그 반대로) 조작할 수 있다. 우왕좌왕 하지 않으면서 원래의 고도로 돌아가기 위한 신속한 수정 조치를 취하기 위해선 미세한 pitch 변화가 이루어져야 한다.
고도 변화가 발생하면 두 가지 행동을 해야 한다. 먼저 altitude tape의 움직임을 멈추기 위해 부드러운 조종간 압력을 가한다. altitude tape의 움직임이 멈추었다면 원래의 고도로 돌아가기 위해 pitch 자세를 변경한다.
한정된 계기로 계기 비행을 수행하는 도중에는 정교한 조종간 입력만이 적용되어야 한다. 고도의 변화를 나타내는 계기 움직임이 나타났다면 조종사는 그 변화를 멈추기 위해 미세한 조종간 입력을 가해야 한다. 급격한 조종간 움직임은 진동 효과를 발생시켜서 고도 변화를 악화시킨다. 이러한 유형의 진동은 조종사로 하여금 방향감각을 잃게 만들어서 고도에 fixate되게 만들 수 있다. 고도계에 fixation 되면 방향 제어와 속도 제어가 상실될 수 있다.
일반적으로 100ft 미만의 고도 변화에 대해서는 1도의 pitch 변화를 사용한다. 자그마한 pitch 변화를 통해 성능을 평가할 수 있을 뿐만 아니라 항공기의 과조작을 막는다.
계기는 포괄적으로 사용되어야 하지만 고장으로 인해 조종사가 한정된 계기만을 사용할 수 있는 경우도 있을 것이다. 이는 partial panel 비행 훈련이 중요한 이유이다. 만약 조종사가 각 계기를 개별적으로 사용하는 방법을 이해한다면 그 외의 계기들이 고장 났다 하더라도 비행을 수행하는데 큰 문제가 발생하지 않는다.
VSI Tape
VSI tape은 pitch attitude를 간접적으로 제공하며 곧 발생할 고도 변화를 보다 즉각적으로 표시한다. vertical speed는 trend 정보뿐만 아니라 rate 정보도 제공한다. VSI tape을 altitude trend tape와 함께 사용하면 조종사는 어느 정도의 수정이 필요한지를 더 제대로 이해할 수 있다. 연습을 통해 조종사는 특정 항공기의 성능을 배우고 특정 rate를 수정하는데 얼마나 많은 pitch 변화가 필요한지 알게 된다.
과거의 analogVSI와 달리 현대의 glass panel displays는 instantaneous VSI를 제공한다. 과거의 VSI 시스템은 rate 정보를 지시하는데 지연이 있었다. 현대의 glass panel displays는 digital air data computer를 사용하기 때문에 지연을 나타내지 않는다. 고도 변화가 즉각적으로 표시되며 빠르게 수정될 수 있다.
VSI tape는 원하는 고도로 돌아가는데 필요한 pitch 변화를 결정하는데 도움을 제공한다. 좋은 rule of thumb로는 고도 변화량의 두 배에 해당하는 vertical speed rate를 사용하는 것이다. 허나 이 변화율이 특정 항공기의 최적 상승률/하강률보다 높아서는 안 된다. 예를 들어 원하는 고도로부터 200ft 벗어났다면 400fpm의 변화율이 충분할 것이다. 만약 고도가 700ft 벗어났다면 이를 두 배로 하였을 때 1,400fpm의 변화율이 필요하다. 대부분의 항공기는 이를 수행할 수 없으므로 최적의 상승률/하강률로 fpm을 제한한다. 최적의 상승률/하강률은 500 ~1,000fpm이다.
계기 조종사가 마주하는 한 가지 실수는 과조작이다. 최적의 변화율로부터 200fpm 이상 벗어나게 되면 과조작이 발생한다. 예를 들어 고도가 200ft 벗어났다면400fpm의 변화율이 필요하다. 만약 계기에 600fpm(최적의 변화율보다 200fpm 많음)이 표시된다면 조종사가 항공기를 과조작 하는 것이다.
원하는 고도로 되돌아갈 때에는 VSI tape가 primary pitch instrument이다. 원하는 vertical speed에서 편차가 발생하면 자세계를 통해 적절한 pitch 변화를 만든다.
항공기가 target altitude에 접근하면 vertical speed를 낮추어서 보다 안정적으로 고도를 잡을 수 있다. 보통target altitude로부터 상승률/하강률의 10% 이내일 때 vertical speed를 낮추기 시작한다.이를 통해 조종사는 급격한 조종간 입력이나G-load 없이 level off를 수행할 수 있다.
Airspeed Indicator(ASI)
ASI는 pitch attitude를 간접적으로 제공한다. power setting과 pitch attitude가 일정한 상태에서는 속도가 일정하게 유지된다. pitch attitude가 낮아지면 속도가 증가하므로 기수를 들어야 한다.
pitch attitude를 높이면 항공기의 기수가 상승하며이로 인해 받음각과 유도 항력이 증가한다. 항력이 증가하면 항공기의 가속도가 줄어든다. airspeed trend indicator는 6초 후의 속도에 대한 trend를 표시한다. 반대로 항공기의 기수가 하강하면 유도항력과 받음각이 감소한다.
ASI를 pitch instrument로 사용하는 경우에는 ASI와 연관된 지연이 발생한다. 이러한 지연은 ASI의 설계 방법과 연관된 것이 아니라 가속도의 변화와 연관된 것이다. 가속도의 변화가 어느 정도인지에 따라 ASI가pitch 변화를 적시에 나타내지 않을 수도 있다. pitch 변화를 위해 ASI만을 참조하게 되면 신속한 수정이 이루어지지 못할 수 있다. 허나 pitch를 부드럽게 변경하면 glass panel displays가1노트의 속도 변화도 나타낼 수 있으며 airspeed trends도 나타낼 수 있다.
계기만을 참조하여 비행할 때에는 pitch 제어를 위해 모든 계기들을 cross-check 해야 한다. pitch와 관련된 계기들을 모두 cross-check 하면 조종사는 항공기 자세를 더 제대로 시각화할 수 있다.
pitch를 위한 primary instrument는 특정 매개변수에 대해 가장 적절한 정보를 제공하는 계기가 된다. 그렇다면 수평비행 도중 일정한 고도를 유지하고 있다면 고도를 직접적으로 표시하는 계기는 무엇일까? 고도를 표시할 수 있는 유일한 계기는 고도계이다. 그 외의 계기들은 supporting instruments로 고도가 변화하는 trend를 나타낼 수는 있으나 직접적으로 고도를 나타내지는 않는다.
supporting instruments는 곧 발생할 고도 변화를 미리 알려준다. 숙련된 조종사는 효율적인 cross-check을 통해 고도 유지를 더욱 제대로 수행할 수 있다.
Bank Control
이 내용은 항공기가 삼타일치가 유지된 상태(즉, 항공기의 세로축이 상대풍과 정렬된 상태)로 비행하고 있다 가정한다. PFD의 자세계는 날개가 수평인지를 나타낸다. turn rate indicator, slip/skid indicator, 그리고 heading indicator 또한 항공기가 직진 비행경로(zero bank)를 유지하는지를 나타낸다.
Attitude Indicator
PFD에서 자세계는 항공기의 정확한 bank angle을 표시할 수 있는 유일한 계기이다. 이는 자세계에 표시된 roll scale 덕분이다.
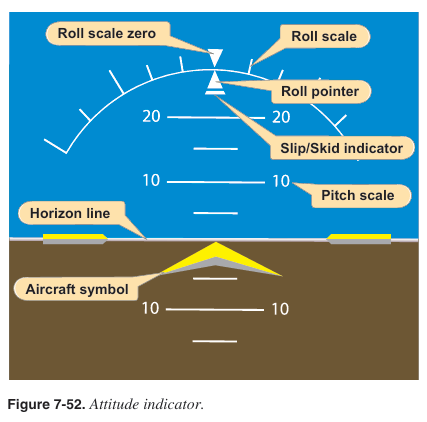
그림 7-52는 자세계 화면을 구성하고 있는 요소들을 식별한다. 화면의 상단은 하늘을 나타내는 파란색이고 하단은 지면을 나타내는 갈색이며 이 둘을 구분하는 흰색 선은 수평선이다. 수평선과 평행한 선들은 pitch scale이다. pitch scale은5도마다 표시되며 10도마다 라벨이 붙는다. pitch scale은 항상 수평선과 평행을 유지한다.
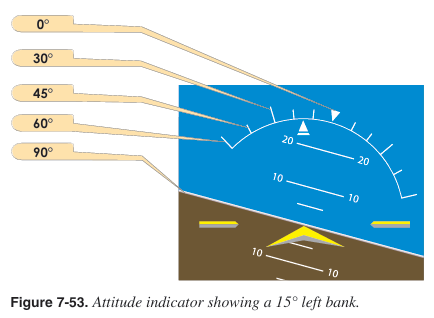
파란색 영역의 곡선은 roll scale이다. scale의 맨 위에 있는 삼각형은 zero index이다. scale의 해시 마크는 bank angle을 나타낸다. [그림 7-53] roll scale은 수평선으로부터 항상 동일한 위치에 있다.
roll pointer는 bank의 각도와 방향을 나타낸다. [그림 7-53] roll pointer는 aircraft symbol과 정렬된다. roll pointer는 자연 수평선과 항공기 가로축의 각도를 나타낸다. slip/skid indicator는 항공기의 세로축이 상대풍과 정렬되어 있는지(즉, 삼타일치가 유지되고 있는지)를 나타낸다. roll pointer가slip/skid indicator와 정렬된 상태로 zero index의 왼쪽이나 오른쪽으로 움직이면 항공기가 해당 방향으로 선회하게 된다. roll scale의 눈금이 잘게 만들어진 덕분에bank angle을 약1도 단위로 쉽게 파악할 수 있다. 삼타일치가 유지된 상태에서 zero index와 roll pointer가 정렬되어 있다면 항공기가 직진 비행을 수행하고 있는 것이다.
EFD의 장점은 세차 오류가 없어진 것이다. 아날로그 계기에서는 자이로에 가해지는 힘에 의해 세차 오류가 발생하였다. 새로운 반도체 계기에서는 세차 오류가 없어졌다.
자세계는 정확한 pitch와bank angles를 나타낼 수 있으므로 자세계가 primary instrument가 되는 순간은 특정 bank angle이나 pitch angle로 비행을 수행하려 할 때이다. 그 외의 경우에는 자세계를 control instrument라 생각할 수 있다.
Horizontal Situation Indicator(HSI)
HSI는 360도로 회전하는 compass card로 이는 magnetic heading을 표시한다. HSI는 정확한 headings를 나타낼 수 있는 유일한 계기이다. HSI가 고장나면 나침반이 예비 계기로 사용될 수 있지만 불규칙하고 불안정한 움직임 때문에 supporting instrument로 사용될 가능성이 더 높다.
원하는 변화율을 달성하기 위해서는 heading 변화율과 해당 변화율을 만족하는데 필요한 bank angle 간의 관계를 이해해야 한다. heading 변화율이 작다는 것은 bank angle이 작다는 것을 의미하며 결국 직진 비행경로에서 벗어나는데 더 많은 시간이 걸린다. heading 변화율이 크다는 것은 bank angle이 크다는 것을 의미한다.
Heading Indicator
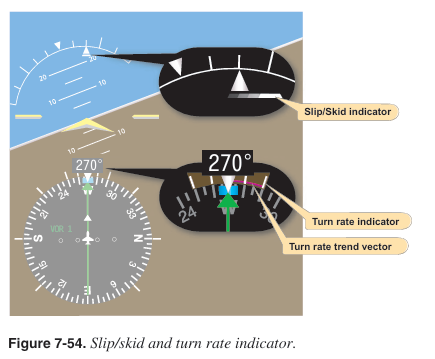
heading indicator는 흰색 숫자가 있는 검정색 박스로이는 항공기의 magnetic heading을 표시한다. [그림 7-54] 항공기의 heading은 가장 가까운 도(°)로 표시된다. 이 숫자가 변화하고 있다면 조종사는 더 이상 직진 비행이 이루어지지 않고 있다는 것을 인지해야 한다.
Turn Rate Indicator
turn rate indicator는 bank를 간접적으로 제공한다. 이것은 반표준율 선회와 표준율 선회를 양 방향으로 표시할 수 있는 자홍색 trend indicator이다. [그림 7-54] turn indicator는 표준율 선회 마킹 바깥으로 자홍색 선을 연장해서 최대 4도의 초당 선회율을 나타낼 수 있다. 선회율이 초당 4도를 초과하면 자홍색 선이 6초 후의 heading을 정확하게 표시할 수 없게 되며 자홍색 선이 멈추고 화살표가 표시된다. 이는 정상 운영 범위가 초과되었음을 조종사에게 알려준다.
Slip/Skid Indicator
slip/skid indicator는 자세계에 표시된 segmented triangle의 아래 부분이다. 이 계기는 항공기의 세로축이 상대풍과 정렬되어 있는지를 나타낸다. [그림 7-54]
조종사는 직진비행을 유지할 때 항상 roll pointer와 slip/skid indicator를 cross-check 해야 한다. heading이 일정하게 유지되고 있는데 roll pointer와 slip/skid indicator가 정렬되어 있지 않다면 항공기는 uncoodinated flight 상태인 것이다. 항공기를 삼타일치 상태로 되돌리기 위해 rudder를 가해야 한다.
Power Control
출력은 추력을 생성하며 이는 적절한 날개 받음각과 함께 중력, 항력, 그리고 관성력을 극복한다.
출력 설정이 바뀌면 비행기의 속도나 고도가 변화하므로 출력 제어는 고도와 속도에 미치는 영향과 연관되어야 한다. 특정 속도에서 출력 설정에 따라 비행기가 수평 비행을 수행하는지, 상승을 수행하는지, 혹은 하강을 수행하는지가 결정된다. 수평비행 도중 출력이 증가하되 속도가 일정하게 유지된다면 비행기는 상승한다. 반면 출력이 감소하되 속도가 일정하게 유지된다면 비행기는 하강한다. 만약 출력 적용 시 고도를 일정하게 유지한다면 속도가 바뀐다.
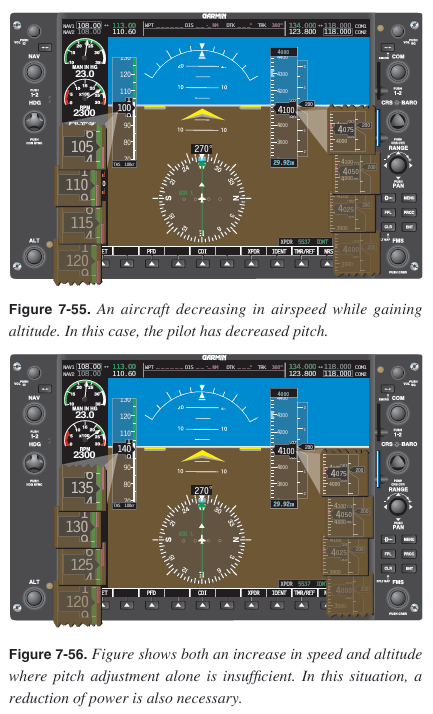
고도와 속도의 관계에 의해 pitch나 power가 변경될 필요성이 결정된다. 만약 속도가 원하는 값에서 벗어났다면 고도계를 확인한 후에 출력 변화가 필요한지를 결정한다. 고도와 속도는 서로 교환할 수 있는 것이라 생각한다. 기수를 낮춰서 고도를 속도로 바꾸거나 기수를 올려서속도를 고도로 바꿀 수 있다. 만약 고도가 원하는 값보다 높고 속도는 낮다면(혹은 그 반대라면) pitch만 변경해서 원하는 고도 및 속도로 되돌아갈 수 있다. [그림 7-55] 속도와 고도가 둘 다 높거나 낮은 경우에는 pitch와 power를 둘 다 변경해야 원하는 속도 및 고도로 되돌아간다. [그림 7-56]
직진수평비행 도중 속도를 변화시키기 위해선 pitch, bank, 그리고 power가 조정되어야 altitude와 heading이 유지된다. 단발 프로펠러 비행기에서 직진수평비행 도중 속도 변화를 위해 출력을 변경하면 모든 축들을 중심으로 자세가 변화하려는 경향이 있다. 따라서 일정한 altitude와 heading을 유지하려면 출력 변화에 비례한 다양한 조종간 압력을 가해야 한다. 증속을 위해 출력을 추가할 때 속도 변화에 따라 forward-elevator pressure를 가하지 않는다면 pitch가 상승한다. 출력 증가로 인해 비행기는 좌측으로 yaw 및 roll 하려는 경향을 나타내며이는 aileron 및rudder 압력으로 상쇄되어야 한다. 이러한 변화에 앞서 나가기 위해서는 cross-check 속도가 증가해야 하며 이 속도는 비행기의 형식, 비행기의 토크 특성, 그리고 출력과 속도가 변화하는 정도에 따라 달라진다.
Power Settings
직진수평비행을 유지하는데 필요한 대략적인 출력 설정을 사전에 알고 있으면 출력 조작과 속도 변경이 훨씬 쉬워진다. 허나 속도를 크게 바꿀 때에는 속도의 변화율을 높이기 위해 초기 출력 변경 시 underpower나overpower를 하는 것이 일반적이다. (작은 속도 변화가 필요한 경우, 혹은 감속이나 가속이 빠르게 이루어지는 비행기의 경우에는 이러한 절차가 필요하지 않음).
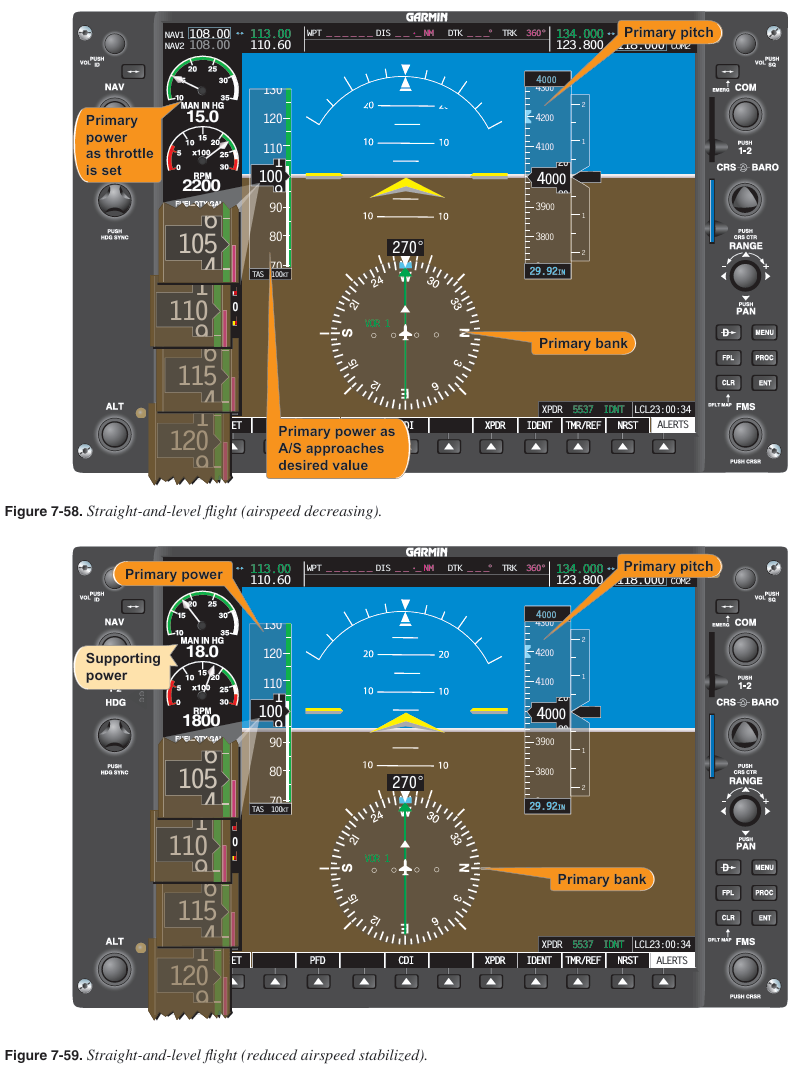
120노트의 정상 순항 속도를 유지하는데 23″Hg가 필요한, 그리고 100노트를 유지하는데 18″Hg가 필요한 비행기를 예로 들어보자. 직진수평비행을 유지하면서 속도를 120노트에서 100노트로 감속하는 방법이 아래에서 설명된다. [그림 7-57, 7-58, 그리고 7-59]
출력을 감소시키 전의 계기 지시가 그림 7-57에 나와 있다. 기본적인 자세가 자세계에 설정되어 있다. 특정한 pitch, bank, 그리고 power 조건들은 다음의 primary instruments에서 확인된다:
Altimeter – Primary Pitch
Heading Indicator – Primary Bank
Airspeed Indicator – Primary Power
pitch와 bank의 supporting instruments가 그림 7-57에 나타나 있다. supporting power instrument가 manifold pressure gauge(혹은 고정 피치 프로펠러의 경우에는 tachometer)임을 주목한다. 그러나 대략 15″Hg(underpower)로 출력 감소가 이루어지면 manifold pressure gauge가 primary power instrument가 된다. [그림 7-58] 연습을 통해 조종사는 throttle의 움직임, 소리의 변화, 그리고 조종간 압력의 변화를 감지해서 power instrument를 잠깐 보는 것만으로도 출력 설정을 변경할 수 있다.
추력이 감소하면 cross-check 속도를 높이고pitch 계기와 bank 계기가 altitude와 heading의 변화를 나타내자마자 left rudder, back-elevator, 그리고 aileron 압력을 가할 준비를 한다. 여기에 익숙해지면 조종사는 heading과 altitude를 유지하면서 변화들을 cross-check, 해석, 그리고 제어하는 방법을 배우게 된다. 속도가 감소하는 도중 고도를 유지하기 위해선 pitch attitude를 비례적으로 증가시켜야 한다. 마찬가지로 토크를 제어하는 효과적인 방법은 rudder로yaw를 상쇄하는 것이다.
출력이 감소하면 고도계는 primary pitch가 되고, heading indicator는 primary bank가 되며, manifold pressure gauge는 순간적으로(그림 7-58에서 15″Hg일 때) primary power가 된다. 비행기가 감속하는 도중 조종간 압력을 trim 해야 한다. 속도가 100노트에 가까워지면 manifold pressure를 대략 18″Hg로 조절한다. 이때 manifold pressure는 다시 supporting power instrument가 되고ASI가 다시 primary power가 된다. [그림 7-59]
Airspeed Changes in Straight-and-Level Flight
직진수평비행 도중 속도를 변화시키는 연습을 하면 three basic instrument skills에 대한 숙련도가 향상되고 직진수평비행 도중 예상되는 몇 가지 일반적인 실수들을 파악하게 해준다. clean configuration(최소 항력 상태)에서 비행기를 제어하는 법을 배운 이후에는 flaps와 landing gear를 올리거나 내리는 도중에 속도를 변화시키는 연습을 해서 cross check과 control 숙련도를 높인다. 훈련 도중 gear와 flap의 작동에 대해 POH/AFM이 지정한 속도 제한을 준수해야 한다.
일부 비행기에는 landing gear와flaps를 내릴 때 직진수평비행을 유지하려면갑작스럽고 지나친 자세 변화가 필요할 수 있다. gear를 내리면 기수가 아래로 향하려는 경향이 있으며flaps를 내리면 partial flap 지점에서 일시적으로 양력이 증가하다가최대 연장 지점에 가까워지면 항력이 현저하게 증가한다.
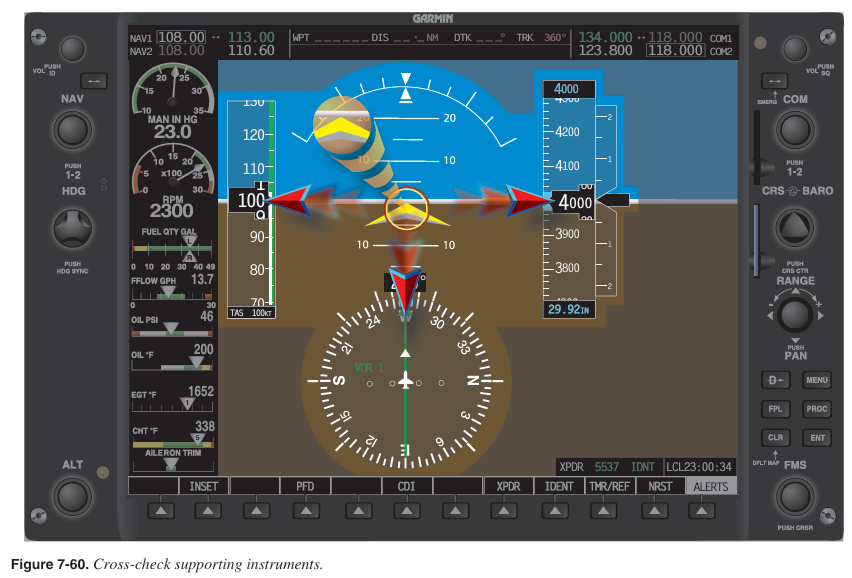
조종 기법은 비행기의 양력 특성과 항력 특성에 따라 달라진다. 따라서 airspeed · gear · flap의 다양한 조합과 관련된 출력 설정과 trim 변화에 대한 지식이 있으면 계기 cross-check 및 interpretation에 대한 문제를 줄일 수 있다. [그림 7-60]
예를 들어 직진수평비행 중인 비행기의 속도가 120노트이고, 출력은 23″Hg manifold pressure/2,300 rpm이며, gear와 flaps는 올려진 상태이다. 감속 이후 gear와 flaps가 완전히 연장된 상태에서 직진수평비행을 유지하려면 25″Hg manifold pressure/2,500 rpm이 필요하다. maximum gear extension speed는 115노트이고 maximum flap extension speed는 105노트이다. gear와 flaps를 내리고 95노트로 감속하는 절차는 다음을 통해 이루어질 수 있다:
1. rpm을 2,500으로 유지한다. 왜냐하면 full drag configuration에서는 높은 출력 설정이 사용되기 때문이다.
2. manifold pressure를 10″Hg로 감소시킨다. 대기속도가 줄어들면 cross-check 속도를 증가시킨다.
3. 받음각이 증가하고 토크가 감소하므로 trim을 조절한다.
4. 115노트에서 gear를 내린다. 기수가 내려가려는 경향이 발생할 것이며 속도 감속률이 증가한다. 일정한 고도를 유지하기 위해 pitch attitude를 높이고 back-elevator pressures를 trim한다. 만약 105노트에서 full flaps를 사용하면 cross-check, interpretation, 그리고 control이 매우 빨라져야 한다. 때문에 gear가 내려진 상태에서 자세를 안정시킨 후에 flaps를 내리는 것이 더 간단하다.
5. gear가 내려진 상태에서 18″Hg manifold pressure는 100노트의 수평비행을 유지한다. 따라서 속도계가 대략 105노트를 나타낼 때 출력을 18″Hg manifold pressure로 부드럽게 증가한 다음 retrim을 수행한다. 이제 100노트로 직진수평비행도중 자세계는 약 2.5 bar width nose-high를 표시한다.
6. flap을 내리면서 미리 결정해둔 값(25″Hg)으로 출력을 증가시킨다. 그리고 일정한 altitude와 heading을 유지하는데 필요한 압력을 trim한다. 이제 95노트로 직진수평비행도중 자세계는 bar width nose-low를 나타낸다.
Trim Technique
trim control은 조종사가 길러야할 가장 중요한 비행 습관 중 하나이다. trimming이란 원하는 비행 자세를 유지하기 위해 조종면에 적용해야 하는 조종 압력을 완화하는 것을 의미한다. 조종사가 조종면에서 손을 떼도 항공기가 현재 자세를 유지할 수 있어야 한다. 손을 떼고도 비행이 가능할 정도로 항공기가 trim 되었다면 조종사는 비행계기와 그 외의 시스템을 모니터링 하는데 더 많은 시간을 할애할 수 있다.
항공기를 trim하기 위해 먼저 trim이 필요한 조종면에 압력을 가하고 압력이 가해지는 방향으로 trim wheel을 돌린다. 조종면에 가해지는 압력을 완화하고 해당 자세를 위한 primary instrument를 모니터링 한다. 원하는 성능이 만들어졌다면 손을 뗀다. trimming이 더 필요하다면 trimming 절차를 다시 수행한다.
항공기는 pitch attitude나 altitude가 아니라 특정 속도에 대하여 trim된다. 항공기 대기속도가 바뀌었다면 re-trim이 필요하다. 예를 들어 항공기가 100노트로 직진수평비행을 하고 있다. 이때 엔진 rpm이 50만큼 높아지면 속도가 증가한다. 속도가 증가함에 따라 양력이 더 발생해서 항공기가 상승한다. 이러한 추가 추력이 어느 정도 높은 고도에서 안정되면 속도는 다시 100노트로 안정될 것이다.
이는 trim이 속도와 어떻게 연관되어 있는지를 보여준다. 초기 고도를 유지하기 위해선 조종간에 forward pressure를 가하면서 trim wheel을 앞으로 돌려서 조종간 압력을 없애야 한다. trim wheel을 앞으로 돌리는 것은 trim 된 속도를 증가시키는 것과 같다. 속도가 변화할 때마다 re-trimming이 필요하다. 속도가 변하는 도중에도trimming을 수행할 수 있지만 마지막trim을 수행하기 전에는 속도가 일정해야 한다. 만약 trim 조정 없이 속도가 변화하게 되면 항공기가 trim된 속도에 도달하기 전까지 고도가 바뀐다.
Common Errors in Straight-and-Level Flight
Pitch
pitch 오류는 보통 다음과 같은 실수들로 인해 발생한다:
1. pitch 조정이 부적절하다.
수정 조치: 항공기가 수평을 유지하고 속도가 안정되었다면 원하는 성능을 달성하기 위해 pitch attitude를 미세하게 조정한다. 성능을 검증하기 위해 supporting instruments를 cross-check 한다.
2. pitch instruments의 cross-check 및 interpretation이 불충분하다. [그림 7-61]
예시: 대기속도가 낮다. 조종사는 nose-high pitch attitude 상태라 생각하고 forward pressure를 가한다. 사실 대기속도가 낮은건 출력 설정이 낮아서였다.
수정 조치: 모든 supporting flight instruments를cross-check하는 속도를 증가시킨다. 조종간 입력을 적용하기 전에 속도와 고도를 안정시켜야 한다.
3. 편차를 허용한다.
예시: PTS에 따라직진수평비행에 대한 고도 범위는 ±100ft이다. 조종사는 고도가 60ft 벗어난 것을 확인하였지만 기준치 이내에 있기 때문에 수정을 하지 않았다.
수정 조치: 이러한 편차가 발견되면 조종사는 항공기를 원래의 고도로 되돌리기 위해 즉시 수정 조작을 수행해야 한다. 고도가 벗어날 수는 있지만 이를 받아들여서는 안 된다.
4. 과조작을 한다.
예시: 고도가 벗어난 것을 조종사가 확인하였다. 원래의 고도로 빠르게 돌아가기 위해 과도한 pitch 변화를 만들었다. 과도한 pitch 변화는 자세를 불안정하게 만들어서 이러한 오류를 악화시킨다.
수정 조치: 원하는 고도로 되돌아가기 위해서는 미세하고 부드러운 수정(고도가 벗어난 정도에 따라 0.5 ~2도까지)이 이루어져야 한다. 계기비행은 항공기 자세률 유지하기 위한 작은 수정들로 이루어진다. IMC에서 비행할 때 항공기 제어 상실과 공간정위상실을 피하기 위해선 과도한 자세 변화를 피해야 한다.
5. 수정된 pitch를 유지하지 못함.
pitch 변경은 지체 없이 수행되어야 하며 해당 자세가 유지되어야 한다. 수정을 만든 이후 조종사가 trimming을 하지 않아서 pitch attitude가 변화하는 경우가 많다. pitch를 변경할 때마다 조종간 압력을 없애기 위해 trim을 다시 조정하는 것이 필수적이다. 신속한 cross-check은 원하는 pitch attitude에서 벗어나는 것을 방지하는데 도움을 준다.
예시: 조종사가 고도 변화를 확인하였다. pitch attitude를 변경하였지만 trim은 조정하지 않았다. 주의 산만으로 인해 조종사의 cross-check이 느려지고 조종간에 가한 압력이 줄어들기 시작한다. 이로 인해 pitch attitude가 변화하였고 결국 원하는 고도로 회복하는 과정이 복잡해졌다.
수정 조치: pitch를 변경하였다면 조종간 압력을 완화하기 위해 즉시 항공기를 trim한다. 원하는 성능이 만들어지는지를 확인하기 위해 신속한 cross-check을 수행해야 한다.
6. cross-check 도중 fixation.
interpretation을 위해 하나의 계기에 불균등한 시간을 할애하는 경우, 혹은 특정 계기에 너무 많은 중요성을 부여해서 불균등한 시간이 할애되는 경우. 항공기 자세들 중 하나에서 눈에 띄지 않은 편차가 발생하는 것을 방지하기 위해선 cross-check 도중 동일한 시간을 소비해야 한다.
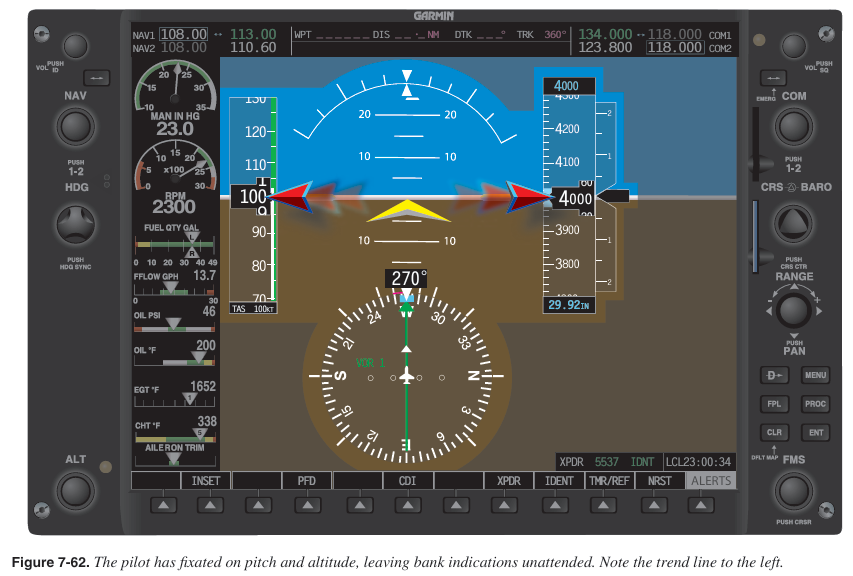
예시: 조종사가 pitch attitude를 수정한 다음 pitch 수정이 적절한지를 확인하기 위해 고도계에만 모든 주의를 집중하였다. 이때 heading indicator에는 주의를 기울이지 않았다(heading indicator는 좌선회를 나타내고 있음). [그림 7-62]
수정 조치: 조종사는 cross-check 도중 모든 계기를 모니터링 해야 한다. 수정이 적절한지 확인하기 위해 하나의 계기에만 fixate 되선 안 된다. 항공기가 또 다른 자세로 벗어나는 것을 방지하기 위해 모든 계기들을 계속해서 스캔한다.
Heading
heading 오류는 보통 다음과 같은 실수들로 인해 발생하지만 이에 국한되지는 않는다:
1. heading indicator를 cross-check 하지 못함(특히 power나 pitch attitude 변경 도중).
2. heading 변화를 제대로 판독하지 못해서 잘못된 방향으로 수정을 만듦.
3. 미리 선정해둔 heading을 기억하지 못함.
4. heading 변화율과bank attitude의 관계를 이해하지 못함.
5. heading 변화에 대응할 때 과조작을 함(특히 출력 변화 도중).
6. heading 변화가 발생할 것을 예상하고 rudder를 일찍 적용함.
7. 작은 heading 편차를 수정하지 못함. heading 오차를 0으로 만들려는 목표가 없다면 조종사는 점점 더 큰 편차를 허용할 것이다. 1도 오차를 수정하는데 필요한 시간과 집중력은20도 오차보다 훨씬 적다.
8. 부적절한 bank attitude로 수정. 10도의 heading 오차를 20도의 bank angle로 수정하려 시도하면 20도의 bank angle이 만들어지기도 전에 이미 원하는 heading을 지나갈 것이며 결국 반대 방향으로 다시 수정을 수행해야 한다. 잘못된 수정 방법을 사용해서 기존의 오류들을 가중하지 않는다.
9. 이전에 발생한 heading 오류의 원인을 확인하지 않아서 같은 오류가 반복됨. 예를 들어 비행기의 trim이 맞지 않아서 왼쪽 날개가 낮아지려는 경향이 있다. 좌선회가 이루어질 때마다 반복적으로 수정은 하지만 trim은 무시된다.
Power
출력 오류는 보통 다음과 같은 실수들로 인해 발생하지만 이에 국한되지는 않는다:
1. 항공기의 특정 power settings와 pitch attitudes에 익숙하지 못함.
2. throttle을 갑작스럽게 적용함.
3. 출력 변경, 상승, 혹은 하강 도중 대기속도의 lead를 잡지 못함.
예시: 하강을 하다가 level off를 시작하면 출력을 증가시킨다. 이는 항공기의 가속도 감소로 인한 대기속도 감소를 방지하기 위함이다. 만약 수평 자세가 설정될 때까지 출력을 가하지 않으면 항공기가 이미 원하는 대기속도 미만으로 감속하였을 것이며 결국 출력을 다시 조정해야 한다.
4. 속도 변화 도중 airspeed tape나manifold pressure indications에 fixation 되어서 속도, 출력, 그리고 pitch/bank를 불규칙하게 제어함.
2. trim 장치의 작동 방법에 대하여 혼동함(trim 작동 방법은 비행기 형식마다 다르다). 일부trim wheels는 비행기의 축과 적절하게 정렬되지만 그 외의 trim wheels는 그렇지 않다. 일부 trim wheels는 예상 방향의 반대쪽으로 회전한다.
3. trim의 원리를, 그리고 항공기는 pitch attitude가 아니라 속도에 대해 trim 된다는 것을 이해하지 못함.
4. trim을 수행하는 순서가 잘못됨. trim은 pitch attitudes를 변화시키기 위한 것이 아니라 조종간 압력을 완화하기 위한 것이다. 먼저 조종사가 조종간을 잡은 후에 trimming을 수행해서 조종간 압력을 완화하는 것이 올바른 절차이다.출력이 변경될 때마다 trim을 계속해서 조정해야 한다. trim을 지속적으로 활용하되 조금씩 사용한다.
각 항공기는 특정 무게에 대해 가장 효율적인 상승률을 만들어내는 특정 pitch attitude와 airspeed를 가진다. POH/AFM에는 가장 바람직한 상승이 만들어지는 속도가 포함되어 있다. 이 값은 최대 총 무게를 기초로 한다. 조종사들은 이러한 속도가 무게에 따라 어떻게 변하는지를 알아야 하며 그래야 비행 도중 속도를 보정할 수 있다.
Entry
Constant Airspeed Climb From Cruise Airspeed
순항 속도로부터 정속 상승에 진입하기 위해 부드럽고 천천히 aft elevator pressure를 가해서yellow chevron(aircraft symbol)을 상승시킨다. [그림 7-63] yellow chevron의 끝부분이 원하는 pitch에 도달하였다면 aft control pressure를 유지하면서 부드럽게 상승 출력을 가한다. 이러한 출력 증가는 pitch를 변화시키기 전에, 혹은 원하는 pitch에 도달한 후에 적용될 수 있다. 최대 출력 상승 이외의 출력 설정이 필요하다면 특정 상승 출력을 위해 POH/AFM을 참조한다. pitch attitude는 항공기의 형식에 따라 달라진다. 속도가 감소하면 조종간 압력을 증가시켜서 자세를 유지하는데 필요한 추가적인 elevator 편향을 보상한다. 조종간 압력을 없애기 위해 trim을 사용한다. trim을 효과적으로 사용하면 조종사는 별다른 주의 없이도 pitch를 더욱 잘 유지할 수 있다. 이를 통해 조종사는 모든 계기를 효율적으로 스캔하는데 더 많은 시간을 할애할 수 있다.
항공기의 성능을 모니터링하기 위해 VSI를 사용해야 한다. 부드러운 pitch 전환을 통해 VSI tape가 상승 경향을 나타내기 시작하며 현재 사용 중인 pitch와 power에 상응하는 상승률에서 안정된다. 이 상승률은 항공기의무게 조건과 대기 조건에 의해 달라질 수 있다. 때문에 조종사는 무게와 대기 조건이 항공기 성능에 어떻게 영향을 미치는지에 대하여 알아야 한다.
항공기가 일정한 airspeed 및 pitch attitude에서 안정되면 pitch를 위한 primary flight instrument는 ASI가 되고 primary bank instrument는 heading indicator가 된다. 항공기 형식에 따라 primary power instrument는 tachometer나manifold pressure gauge가 된다. 만약 pitch attitude가 올바르다면 원하는 속도를 향해 대기속도가 천천히 줄어들 것이다. 만약 원하는 속도에 도달하지 못하였다면 원하는 속도에서 항공기가 안정될 때까지 pitch를 조금씩 변경한다. 속도가 변화하였다면 trim을 조정해야 한다.
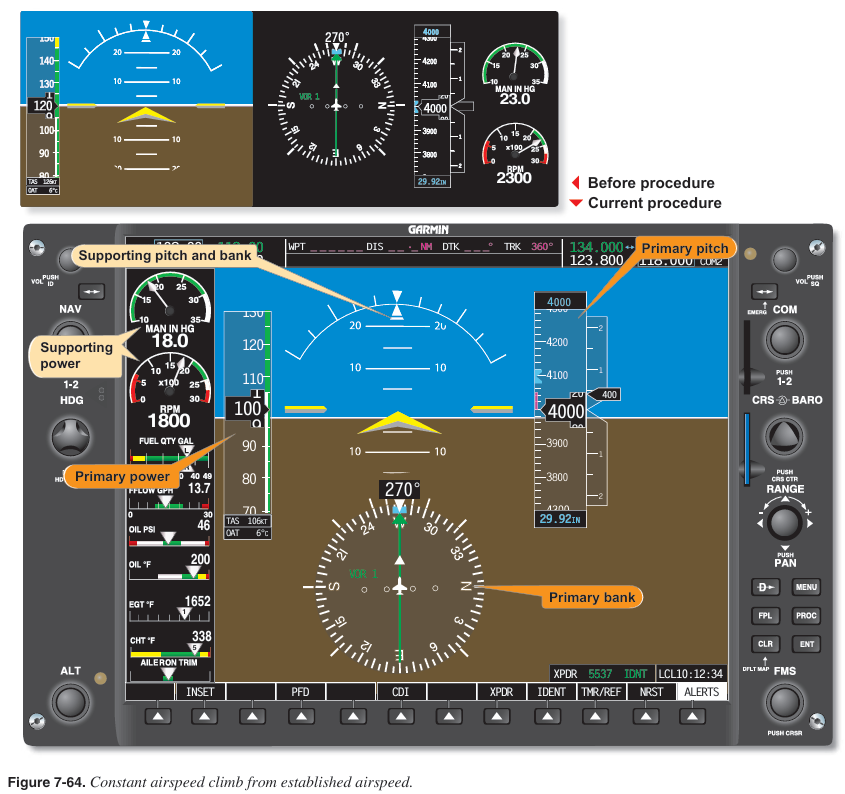
Constant Airspeed Climb From Established Airspeed
정속 상승에 진입하기 위해 먼저 순항 속도에서 상승 속도로 감속을 완료한다. 감속 도중에는 직진수평 비행을 유지한다. 상승에 진입하는 방법은 앞서 설명한 방법(Constant Airspeed Climb From Cruise Airspeed)과 유사하다. 단, 이 경우에는 pitch attitude를 올릴 때 반드시 출력을 증가시켜야 한다. [그림 7-64] pitch를 변화한 후에 출력을 증가시키면 항력 증가로 인해 속도가 감소한다. 반면 pitch를 변화하기 전에 출력을 증가시키면 excess thrust로 인해 속도가 증가한다.
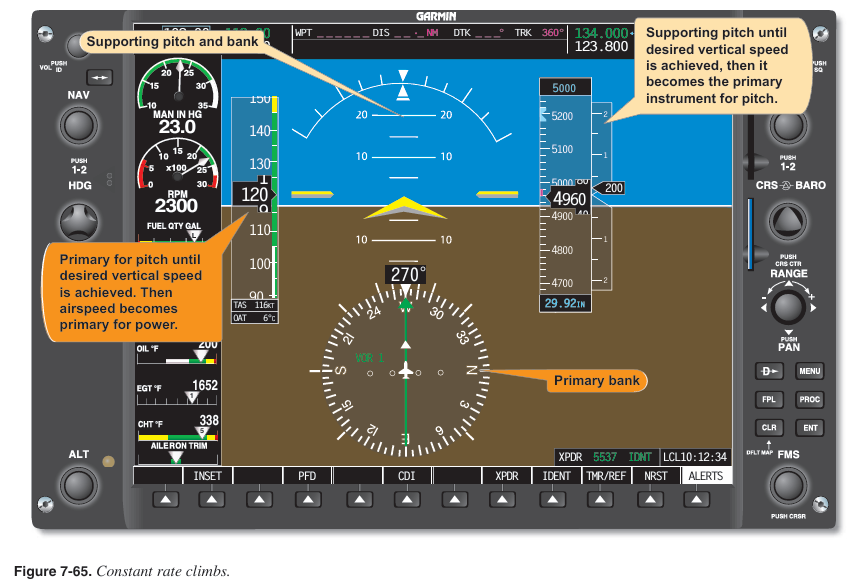
Constant Rate Climbs
정률 상승에 진입하는 방법은 정속 상승에 진입하는 방법과 매우 유사하다. 출력을 증가시킬 때 elevator pressure를 부드럽게 가해서 원하는 상승률이 발생하는 pitch attitude까지 yellow chevron을 올린다. 이 기동의 초반에는 ASI가 pitch를 위한 primary instrument이며상승률이 안정된 후에는 VSI tape이 primary instrument가 된다. 이제 ASI는 power를 위한 primary instrument이다. 원하는 상승률로부터 편차가 발생하면 미세한 pitch 변화가 필요하다. [그림 7-65]
performance, pitch, 그리고 power의 편차를 보정하기 위해 수정을 적용할 때 안정적인 비행 자세를 계속 유지하기 위해선 조종 입력들이 조화를 이루어야 한다. 예를 들어 현재 상승률은 원하는 값보다 적지만 속도는 정확하다. 이때 pitch를 올리면 상승률이 순간 증가한다. 허나 출력을 증가시키지 않으면 항력 증가로 인해 속도가 빠르게 줄어들기 시작한다. 하나의 변수가 변경되었다면 다른 변수들도 조화롭게 변경되어야 한다.
반대로 airspeed는 낮고 pitch는 높은 경우에는 pitch attitude만 낮춰도 문제가 해결될 수 있다. 출력 감소가 필요한지 확인하기 위해 항공기 기수를 약간만 낮춘다. 항공기의 pitch setting과 power setting에 익숙해지면 정밀한 자세 계기 비행을 수행하는데 도움이 된다.
Leveling Off
상승을 하다가 수평을 잡기 위해선 원하는 고도에 도달하기 전에 pitch를 줄여야 한다. 원하는 고도에 도달하기 전에 pitch를 줄이지 않으면 항공기의 가속도로 인해 해당 고도를 통과하게 된다. 적용해야 할 lead의 양은 상승률/하강률에 따라 달라진다. 상승률/하강률이 커질수록 level off를 위한 lead가 커져야 한다. 좋은 rule of thumb는 상승률/하강률의 10%만큼level off를 lead하는 것이다(1,000fpm ÷ 10 = 100feet lead).
원하는 고도에서 수평을 잡기 위해 level pitch attitude로 forward elevator pressure를 가하면서VSI와 altimeter tapes를 모니터링 한다. 하강률이 점점 감소하고 속도는 증가하기 시작해야 한다. 원하는 순항 속도로 증속하기 전까지는 상승 출력 설정을 유지한다. 증속 도중 고도를 유지하기 위해 고도계를 계속 모니터링 한다. 순항 속도에 도달하기 전에는 출력을 감소시켜서 속도가 과도해지는 것을 막는다. 여기에 필요한 lead 시간은 항공기가 가속하는 속도에 따라 달라진다. airspeed trend indicator를 사용하면 특정 속도를 향해 항공기가 얼마나 빠르게 도달하는지에 대해 도움을 얻을 수 있다.
상승 속도를 그대로 유지하면서 수평을 잡는 경우에는 수평 비행에 적절한 자세로 pitch를 낮추면서 상승 속도가 유지되는 값으로 power를 줄인다. pitch와 power의 조화로운 감소를 통해 속도의 변화가 없어야 한다.
Descents
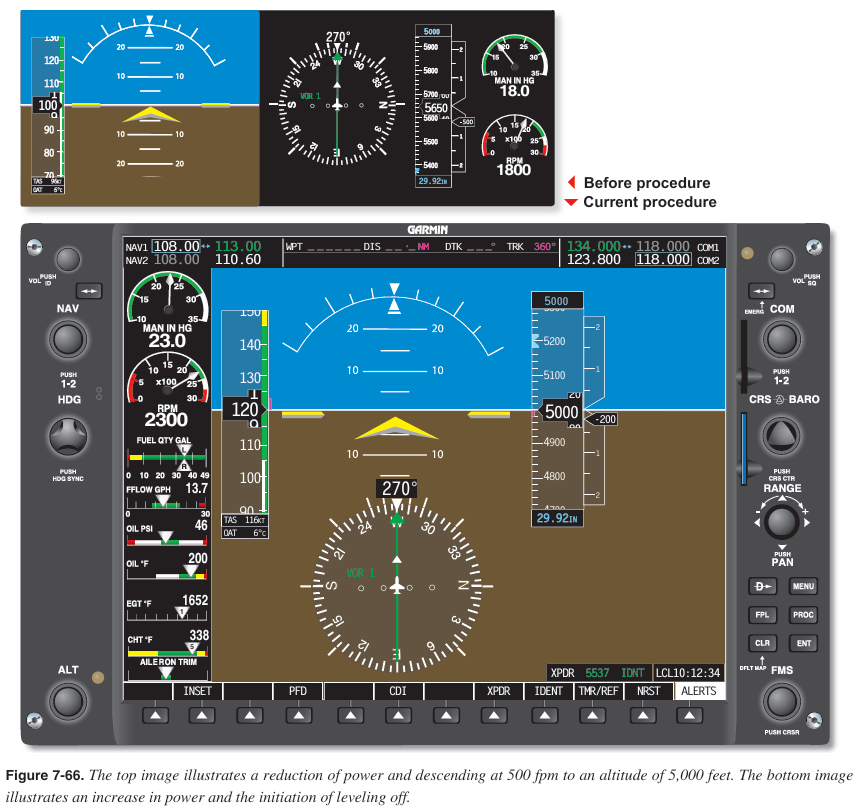
하강 비행은 다양한 airspeeds 및 pitch attitudes에서 수행될 수 있다. 출력을 줄이거나, 수평비행 자세 보다 낮은 자세로 pitch를 내리거나, 항력을 추가하면 하강이 시작된다. 이러한 변화들 중 하나가 수행된 후에 대기속도는 결국 안정이 된다. 속도가 변하고 있을 때 정확한 pitch를 표시하는 계기는 자세계뿐이다. 자세계를 사용하지 않는 경우에는(예를 들어 partial panel flight) 항공기가 일정한 속도 및 하강률에서 안정되기 전까지 ASI tape, VSI tape, 그리고 altimeter tape가 변화할 것이다. altimeter tape은 계속해서 하강을 표시한다. pitch를 일정하게 유지하고 항공기가 안정될 때까지 기다린다. 자세나 속도가 변화하는 동안 조종간 압력을 없애기 위해 trim을 지속적으로 적용한다. 항공기의 비행경로와 속도가 변화하고 있으므로 이때 스캔 속도가 빨라져야 한다. [그림 7-66]
Entry
하강은 일정한 대기속도로, 일정한 하강률로, 혹은 일정한 대기속도 및 하강률로 수행될 수 있다. 다음 방법은 자세계의 유무와 관계없이 수행될 수 있다. 항공기가 직진수평비행을 유지하면서 특정 속도로 감속할 수 있도록 출력을 줄여준다. 원하는 속도에 가까워지면 출력을 미리 결정해둔 값으로 줄인다. 이때 pitch를 낮춰주지 않으면 속도가 계속해서 줄어든다. pitch를 위한 primary instrument는 ASI tape이다. 원하는 속도로부터 편차가 발생하면 자세계를 통해 pitch를 조금씩 조정하고 airspeed tape을 확인한다. airspeed trend indicator를 통해 현재 증속중인지, 그리고 그 rate가 어느 정도인지 판단한다. 조종간 압력을 trim하는 것을 잊지 말아라.
정률 하강에 진입하는 절차는 정속 하강에 진입하는 절차와 동일하다(단, pitch를 위한 primary instrument는VSI tape이다). power를 위한 primary instrument는 ASI이다. 특정 속도를 유지하면서 정률 하강을 수행하는 경우에는 pitch와 power가 조화롭게 사용되어야 한다. pitch의 변화는 속도에 직접적으로 영향을 미친다. 반대로 pitch가 일정하게 유지되고 있을 때 속도가 변화하면 하강률이 직접적으로 영향을 받는다.
Leveling Off
하강을 하다가 순항 속도로 수평을 잡기 위해 먼저 순항 설정으로 출력을 증가시킨 후에 pitch를 수평비행 자세로 되돌리기 시작한다. level off 시작 지점을 결정하는데 사용되는 기술은 하강률의 10%에 해당하는 고도만큼 level off를 lead 하는 것이다. 예를 들어 항공기가 1,000fpm으로 하강하고 있다면 level off 고도로부터 100ft 지점에서 level off를 시작한다. 만약 pitch attitude를 늦게 변화시키기 시작했다면 pitch를 급격하게 변화시키지 않는 한 원하는 고도를 통과하려는 경향이 있다. 조작 문제나 공간정위상실로 이어질 수 있는 급격한 변화를 만들지 않도록 주의한다. level pitch attitude가 만들어졌다면 원하는 속도까지 항공기를 증속시킨다. airspeed tape와 altitude tape로 성능을 모니터링 한다. 속도가 벗어난 것이 확인되었다면 출력을 조정한다. altimeter tape을 cross-check해서 항공기가 수평비행을 유지하고 있는지 확인한다. 고도가 벗어난 것이 확인되었다면 원하는 고도로 다시 되돌아갈 수 있도록 pitch를 변경한다. pitch를 변경하였다면 출력 세팅도 조화롭게 변경되어야 한다. 원하는 순항 속도를 유지하기 위해 대기속도를 모니터링 한다.
하강 속도를 그대로 유지하면서 수평을 잡는 경우에도 조종사는 pitch attitude를 높이기 시작할 시점을 결정해야 한다. 만약 pitch만 들면 항력 증가로 인해 속도가 변화한다. 속도를 유지하기 위해 출력을 미리 결정해둔 값까지 부드럽게 증가시켜야 한다. 조종간 제어 압력을 완화하기 위해 항공기를 trim 한다.
Common Errors in Straight Climbs and Descents
상승 및 하강 오류들은 일반적으로 다음 실수들로부터 발생하지만 이에 국한되지는 않는다:
1. 상승 시작 시 pitch 과조작. 정교한 자세 계기 비행을 위해서는 항공기에 익숙해지는 것이 중요하다. 특정 속도와 관련된 pitch attitudes에 익숙해지기 전까지는 초기 pitch로부터 수정을 만들어내야 한다. pitch를 변경한다 해서 즉각적으로안정적인 결과가 만들어지지는 않으므로새로운 속도와 수직 속도가 안정되는 동안 인내심을 유지해야 한다. 성능이 검증되기 전까지는 또 다른 pitch 변화를 수행하지 않는다. 작은 변화가 보다 신속한 결과를 낳으며 안정적인 비행경로를 만들어낸다. pitch와 power를 크게 변화시키면 제어가 더 어려워지며 회복 절차가 복잡해질 수 있다.
2. 계기 cross-check 속도를 높이지 못함. pitch나 power를 변경할 때마다 cross-check 속도가 높아져야 한다. cross-check이 느리면 비행 자세가 벗어날 수 있다.
3. 새로운 pitch attitudes를 유지하지 못함. 편차를 수정하기 위해 pitch를 변경하였다면 성능이 검증되기 전까지 새로운 pitch attitude를 유지해야 한다. trim을 사용하면 새로운 pitch attitude를 유지하는데 도움이 된다. 만약 pitch가 유지되지 못하면 새로운 pitch가 편차를 수정하는데 충분했는지 검증하지 못한다. pitch attitude가 계속 바뀌면 회복 절차가 지연된다.
4. 효율적인 trim 기법을 사용하지 못함. 조종사가 조종간 압력을 직접 유지해서 pitch가 변화되었다면 초기 수정으로 인한 성능이 검증될 수 없다. 직접 pitch attitudes를 유지하려 시도하면 조종사가 조종간 압력을 더 가하거나 완화하는 경향이 있다. trim을 사용하면 조종사가 조종간 압력을 가하지 않고도 비행할 수 있게 해준다.
5. 적절한 출력 설정을 사용하지 못함. 조종사가 항공기의 특정 pitch setting과 power setting에 익숙하지 않으면 비행경로를 변경하는데 오랜 시간이 걸린다. 비행경로를 신속하게 변경하기 위해서는 pitch setting과 power setting을 배워야 한다.
6. pitch 및/혹은 power를 조정하기 전에 속도와 수직 속도를 cross-check 하지 않음. 속도나 수직 속도 중 하나를 수정함으로써 다른 하나의 편차도 수정되는 경우가 있다.
7. 수평을 잡는 도중 pitch와 power를 조화롭게 사용하지 않음. 수평을 잡는 도중 pitch와 power가 조화롭게 사용되어야 원하는 결과를 얻을 수 있다. 출력을 가하기 전에 pitch를 들면 항력이 증가하며 결국 대기속도가 원하는 값 이하로 감소한다.
8. supporting pitch instruments를 사용하지 않아서 VSI를 chase 함. pitch를 변경하는 control instrument로 항상자세계를 사용한다.
9. 상승이나 하강 도중 수평을 잡기 위한 적절한 lead를 결정하지 못함. 너무 오래 기다리면 고도를 통과할 수 있다.
10. Ballooning – 수평을 잡고 출력을 증가시킬 때 forward control pressure를 유지하지 못함. 출력 증가로 인해 추가 양력이 발생해서 기수가 pitch up 한다.
이전 장에서는 직진수평비행과 상승 및 하강을 다루었다. 허나 자세 계기 비행은 직선비행만으로 이루어지지 않는다. 어느 시점에서 항공기는 항로, GPS 경로, 그리고 계기 접근을 따라 기동하기 위해 선회를 수행해야 한다. 계기 비행의 핵심은 pitch와 bank를 부드럽게 변화시키는 것이다. 계기 비행은 급격한 비행 조작 없는 느리지만 신중한 과정이어야 한다.
특정 heading으로 향하는 선회는 표준율 선회로 이루어져야 한다. 표준율 선회는 초당 3도의 선회율로 정의되며이는 360도를 완전히 선회하는데 2분이 소요됨을 의미한다. 초당 3도의 선회율은 시기적절한 heading 변화를 가능하게 해주며 조종사가 비행계기들을 cross-check 할 시간과 항공기에 가해지는 공기역학적 힘들이 급격하게 변하지 않게 해줄 시간을 충분히 제공한다. 조종사의 cross-check이 방해될 정도로 항공기를 빠르게 기동서는 안 된다. 대부분의 autopilot은 표준율 선회로 선회하도록 프로그램 되어 있다.
Establishing A Standard Rate Turn
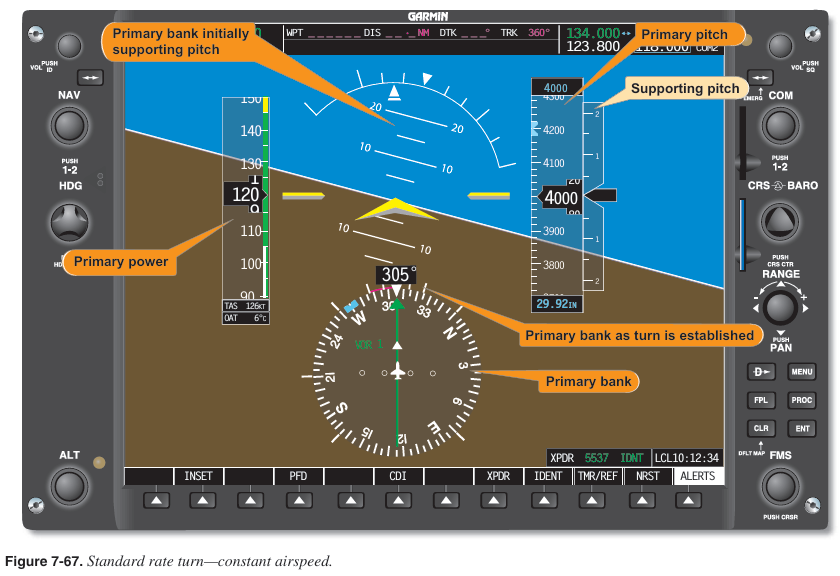
표준율 선회를 수행하기 위해 먼저 bank angle의 근사치를 계산한 다음 이를 자세계에 설정한다. bank angle을 계산하는 rule of thumb는 true airspeed의 15%를 사용하는 것이다. 이를 구하는 간단한 방법은 속도를 10으로 나눈 다음 그 결과의 1/2을 더하는 것이다. 예를 들어 100노트에서는 약 15도의 bank angle이 필요하다(100/10 = 10 + 5 = 15). 120노트로 표준율 선회를 하는 경우에는 약 18도의 bank가 필요하다. HSI에 위치한 turn rate indicator를 cross-check 해서 현재의 bank angle이 표준율 선회를 수행하기에 충분한지 확인한다. 원하는 성능을 달성하기 위해 bank angle을 약간 수정해야 할 수 있다. 이 경우에는 표준율 선회를 달성하는 것이 목표이므로 primary bank instrument는 turn rate indicator이다. turn rate indicator는 표준율 선회를 명확하게 지시할 수 있는 유일한 계기이다. 자세계는 bank angle을 설정하기 위해 사용되는 control instrument이다. 대신본인이 계산한 값보다bank angle이 더 많은지 더 적은지 확인하기 위해 bank angle을 cross-check 해서 자세계를 supporting instrument로 사용할 수는 있다.
항공기가 roll을 시작하면 양력의 수직 성분이 감소한다. [그림 7-67] 이 때문에 수평 비행을 유지하기 위해서는 추가 양력이 발생해야 한다. 고도가 떨어지려는 경향을 막을 수 있을 정도로 조종간에 aft pressure를 가한다. 양력이 증가함에 따라 유도 항력도 발생한다. 이러한 추가 항력으로 인해 항공기가 감속하기 시작한다. 이에 대응하기 위해 power lever를 증가해서 추력을 가한다. 고도와 속도가 유지되었다면 trim wheel을 사용하여 조종간 압력을 제거한다.
표준율 선회로부터 roll out을 할 때 조종사는 부드럽게 삼타일치를 적용해서 날개 수평 자세를 만들어야 한다. 원하는heading에 도달하는데 필요한lead를 추정하기 위해 roll-out 속도를 roll-in 속도와 동일하게 적용해야 한다.
선회로부터 직진비행으로 전환하는 도중에는 attitude indicator가 bank를 위한 primary instrument이다. 날개 수평이 만들어진 이후에는 heading indicator가 bank를 위한 primary instrument이다. 항공기가 zero bank에 도달하였을 때 level pitch attitude에 도달하기 위해선 bank angle이 감소함에 따라 pitch attitude도 감소시켜야 한다. trim wheel을 통해 과도한 조종간 압력을 없애야 한다는 것을 기억하라.
Common Errors
1. 표준율 선회와 관련된 일반적인 오류 중 하나는 조종사가 표준율 선회에 해당하는 적절한 bank angle을 유지하지 못하는 것이다. 선회 도중 bank를 위한 primary instrument는 turn rate indicator이다. 적극적인 cross-check을 통해 조종사는 overbanking이나underbanking으로 인해 발생하는 실수들을 최소화해야 한다.
2. 표준율 선회 도중 일반적으로 발생하는 또 다른 오류는 crosscheck이 비효율적이거나 충분하지 않다는 것이다. 조종사는 기동 도중 altitude, airspeed, 그리고 bank angle이 벗어나는 것을 방지하기 위해 cross-check을 적극적으로 수행해야 한다.
3. 보통 fixation은 자세 계기 비행과 관련된 주요 오류이다. 계기 한정을 위해 훈련을 받는 조종사들은 당장의 중요한 업무에만 집중해서 turn rate indicator에 모든 주의를 기울이는 경향이 있다. modified radial scan은 조종사가 기동 도중 모든 계기를 적절하게 scan 할 수 있도록 해준다.
Turns to Predetermined Headings
선회는 조종사가 초기 비행 훈련 도중 배우는 가장 기본적인 기동들 중 하나이다. 항공기를 제어하는 것, 삼타일치를 유지하는 것, 그리고 원하는 heading에서 부드럽게 roll out하는 것은 모두 능숙한 자세 계기 비행의 핵심이다.
EFD는 모든 종래의 계기들을PFD에 통합해서 조종사로 하여금 자세 계기 비행의 모든 구간에서 계기들을 더욱 제대로 활용할 수 있게 해준다. 자세계의 크기가 커진 덕분에 조종사가 pitch를 제대로 제어할 수 있게 되었으며 turn rate indicator가 도입된 덕분에 특정 heading에 도달하기 위한 roll-out 시작 시점을 결정하기 쉬워졌다.
heading 변화에 필요한 bank angle을 결정할 때 보통 heading 변화가 작은 경우에는 총 heading 변화량보다 작은 bank angle을 사용한다. 예를 들어 20도의 heading 변화가 필요하다면 20도 이하의 bank angle이 필요하다. bank angle을 더 제대로 결정하는 또 다른 rule of thumb는 총 heading 변화량의 절반에 해당하는, 허나 표준율 선회를 초과하지 않는 bank를 사용하는 것이다. 표준율 선회를 위한 정확한 bank angle은 진대기속도에 따라 달라진다.
이를 염두에 두고 bank angle을 계산하였다면 그 다음 단계는 언제 roll-out을 시작할지 결정하는 것이다. 예를 들어 항공기가 heading 030으로부터 heading 120으로 선회를 시작하였다. 주어진 속도에서 표준율 선회는 15도 bank를 필요로 한다. 조종사는 heading indicator가 112도를 표시할 때 120을 향하여 roll-out을 시작하길 원한다. 이때 필요한 계산은 다음과 같다:
15도 bank(표준율 선회) ÷ 2 = 7.5도
120도 – 7.5도 = 112.5도
이 기법을 통해 조종사는 overshoot/undershoot 양을 확인해서 lead의 양을 수정해야 하는지 더 제대로 판단할 수 있다.
Timed Turns
EFD로 timed turns를 수행하는 방법은 아날로그 계기로 timed turns를 수행하는 방법과 동일하다. 이 기동을 수행하는데 사용되는 계기는 시계와 turn rate indicator이다. 이 기동의 목적은 조종사가 scanning에 능숙해지는 것뿐만 아니라 표준 계기 없이도 항공기를 조종하는 능력을 발전시키는 것이다.
heading indicator가 손실되었다면 timed turns가 필수적이게 된다. 이는 AHRS나magnetometer가 고장났을 때 발생할 수 있다. 어쨌든 항법을 위해서 나침반을 사용할 수는 있다. magnetic compass turns 대신 timed turns를 사용하는 이유는 기동이 단순하기 때문이다. magnetic compass turns를 위해서는 조종사가 나침반과 관련된 다양한 오류를 고려해야 하지만timed turns는 그렇지 않다.
선회를 시작하기 전에 turn rate indicator의 표준율 지시가 실제로 초당 3도의 선회를 지시하는지 확인한다. 이를 위해선 calibration(보정)이 수행되어야 한다. 왼쪽 방향이나 오른쪽 방향으로 표준율로 선회를 시작한다. 나침반이 cardinal heading을 지날 때 디지털 타이머를 시작한다. compass card가 다른 cardinal heading을 통과할 때 타이머를 중지한다. 날개를 수평으로 만들고 선회율을 계산한다. turn rate indicator가 보정되어 있어서 올바른 지시를 제공한다면 90도의 heading 변화에 30초가 소요된다. 90도의 heading 변화에 걸리는 시간이 30초 초과/미만인 경우에는 그 차이를 보상하기 위해 turn rate indicator 지시를 standard rate line의 아래/위로 편향해야 한다. 한 쪽 방향에 대하여 보정이 완료되었다면 반대쪽 방향으로 선회를 수행한다. 양 방향에 대하여 보정이 완료되면 그 보정 값을 모든 timed turns에 적용한다.
timed turn을 수행하기 위해 heading 변화량을 설정한다. 예를 들어 120도에서 240도로 heading을 변경한다면 먼저 heading 차이를 계산하고 이를 3으로 나눈다. 이 경우 120을 3으로 나누었을 때 그 값은 40초이다. 이는 완벽한 표준율 선회를 유지했을 때 120도의 heading 변화에 40초가 걸린다는 것을 의미한다. 항공기가 표준율 선회로 선회하기 시작할 때 시간을 재기 시작한다. 이 기동 도중 모든 비행계기를 모니터링 한다. primary pitch instrument는 고도계이다. primary power instrument는 ASI이고 primary bank instrument는 turn rate indicator이다.
계산된 시간이 만료되었다면 부드럽게 roll-out을 시작한다. roll-in과 roll-out을 동일한 속도로 수행하였다면 roll-in과 roll-out에 사용된 시간이 이 계산에 포함되지 않아도 된다. 연습을 통해 조종사는 원하는 heading에서 날개 수평을 만들어내야 한다. 만약 편차가 발생하였다면 올바른 heading을 설정하기 위해 미세 수정을 수행한다.
Compass Turns
magnetic compass는 작동을 위해 다른 동력원을 필요로 하지 않는 유일한 계기이다. AHRS나magnetometer가 고장나면 항공기 heading을 결정하는데 사용될 수 있는 유일한 계기는 magnetic compass이다. magnetic compass의 사용 방법에 대한 자세한 설명은 다음 글의 Compass Turns를 참조한다.
계기 비행 훈련 목적상 steep turn은 표준율 선회를 초과하는 모든 선회로 정의된다. 표준율 선회는 초당 3도로 정의된다. 초당 3도의 선회율에 해당하는 bank angle은 대기속도에 따라 달라진다. 속도가 증가하면 bank angle을 증가시켜야 한다. 표준율 선회에 해당하는 정확한 bank angle은 중요하지 않다. 표준율 선회에 필요한 bank angle은 보통 10 ~20도이다. steep turn의 훈련 목표는 과도한 bank angle에서 항공기를 능숙하게 제어하는 것이다.
steep turns 훈련은 조종사가 cross-check 기술을 연마하게 해주고 광범위한 비행 자세에서 고도를 제어하는 능력을 향상시켜 준다. 비록 현재의 계기 비행 시험 PTS는 steep turns를 시연하도록 요구하지 않지만 그렇다 해서 계기 훈련 조종사가 교관에게 그 숙련도를 증명해야 할 필요성이 없어진 것은 아니다.
(국내의 경우에는 계기비행증명 PTS에 급선회가 명시되어 있다.)
steep turns 훈련을 통해 조종사는 빠르게 변화하는 공기역학적 힘을 인지 및 적응하는 방법을 배운다.공기역학적 힘들이 빠르게 변화하기 때문에 비행계기들의 cross-check 속도가 빨라져야 한다. 기동에 진입하고, 기동을 유지하고, 기동을 종료하는 절차는 shallow turns와 동일하다. 공기역학적 힘이 증가할 뿐만 아니라 힘들이 변화하는 속도도 빨라지기 때문에 계기 cross-check와interpretation에 대한 숙련도가 향상된다.
Performing the Maneuver
왼쪽으로 steep turn에 진입하기 위해 45도 bank로 선회를 시작한다. glass panel displays가 아날로그 계기에 비해 갖는 장점은 roll scale에 표시된45도 bank 마킹이다. roll scale에 표시된45도 bank 마킹 덕분에 조종사는 원하는 bank angle을 향하여 정밀하게 선회를 수행할 수 있다. [그림 7-68]
bank angle이 증가함에 따라 양력의 수직 성분이 감소하기 시작한다. 양력의 수직 성분이 계속해서 감소하면 VSI tape, altitude trend indicator, 그리고 altimeter에 고도 손실이 표시된다. 또한 pitch attitude가 낮아져서 속도가 증가하기 시작한다. steep turns 훈련을 시작하기 전에 계기들을 포괄적으로 scanning 하는 기법을 발달시키는 것이 매우 중요하다. 계기만을 참조해서 steep turns를 수행하는 경우에는 ASI, VSI, altimeter,그리고모든trend indicators를 활용하는 것이 필수적이다.
고도 손실을 피하기 위해선 조종사가 back pressure를 서서히 증가시켜야 한다. 필요한 pitch 변화는 항공기 유형에 따라 달라지며 보통 3 ~5도 이하이다. back pressure가 증가함에 따라 받음각이 증가해서 양력의 수직 성분이 증가한다. 고도 편차가 발생하였다면 조종간 압력을 적절하게 수정해야 한다. steep turns 초기 훈련 도중에는 조종사가 overbank를 수행하려는 경향을 보인다. over banking이란bank angle이 50도를 초과하는 경우이다. outboard wing이 더 빠르게 움직일수록 inboard wing과의 양력 차이가 점점 커진다. bank angle이 45도 너머로 점점 깊어지면 양력의 두 요소들(수직과 수평)이 서로 반비례하게 된다.
bank angle이 45도를 초과하였다면 이제는 양력의 수평 성분이 더 큰 힘이 된다. 만약 고도가 감소할 때 조종사가 back pressure만 가하면 양력의 수평 성분이 증가해서 선회 반경이 좁아지기 시작한다. 만약 aft pressure가 계속해서 증가하면 양력의 수직 성분 손실과 공기역학적 날개 하중으로 인해 항공기의 기수가 상승하지 못하는 시점에 도달하게 된다. 이때 pitch를 더 증가시키면 선회 반경이 더 좁아지기만 한다.
계기만을 참조해서 steep turn을 성공적으로 수행하기 위해선 steep turns와 관련된 공기역학을 이해해야 하고 cross check을 빠르고 착실하게 수행해야 한다.조종사는 언제든 trim을 통해 조종간 압력을 없애야 한다. 비행 교관은 연습을 통해 trim을 사용하거나 사용하지 않고도 steep turn을 성공적으로 수행하는 방법을 시연할 수 있다. 기동을 위해 항공기를 trim 하면 사실상 기동을 수행하는데 거의 손을 쓰지 않아도 된다. 이렇게 되면 계기들을 cross-check 및 interpret 하는데 시간을 더 할애할 수 있다.
고도 변화를 수정할 때에는 back pressure만 조정하는 것이 아니라 bank angle을 ±5도로 수정해서 양력의 수직 성분을 변화시키는 것이 중요하다. 이 두 가지 행동들은 동시에 이루어져야 한다.
steep turns로부터 직진수평비행으로 회복하는 동안 기동에 진입한 고도, 기동에 진입한 heading, 그리고 기동에 진입한 속도로 되돌아가기 위해선 power를 aft control forces와 함께 변화시켜야 한다.
기동 순서:
1. clearing turns를 수행한다.
2. 45도 bank로 좌선회를 시작함과 동시에 pitch attitude를 대략 3 ~5도로 높인다.
3. 30도 bank를 통과하였다면 기동에 진입한 속도를 유지하기 위해 출력을 증가한다.
4. aft control force를 없애기 위해 trim을 적용한다.
5. 원하는 heading으로부터 대략 20도 전에 roll out을 시작한다.
6. level cruise pitch attitude를 향해 forward control pressure를 가한다.
7. 속도를 유지하기 위해 기동에 진입할 때 사용하였던 출력 설정으로 출력을 감소시킨다.
8. 실현 가능한대로 항공기를 re-trim 하거나 우측으로 steep turn을 계속한다.
9. 기동이 완료되면 순항 비행으로 되돌아가고 적절한 checklist 항목들을 수행한다.
Unusual Attitude Recovery Protection
unusual attitude는 조종사가 맞이할 가장 위험한 상황들 중 하나이다. 계기 해석과 항공기 조작에 대한 제대로 된 회복 훈련이 없다면 비정상 비행 자세가 치명적 사고로 악화될 수 있다.
아날로그 계기를 사용하는 경우에는 조종사가 항공기 자세를 추론하기 위해 여러 계기들을 번갈아서 scan해야 한다. 이러한 계기들 각각은 성공적 회복에 필요한 정보를 충분히 제공하지 못한다.
EFD에는 unusual attitudes를 인지 및 회복하는데 도움이 되는 기능들이 있다. PFD는 모든 비행계기들을 한 화면에 표시한다. 각 계기는 자세계 화면 위에 겹쳐진다. 이러한 구성을 통해 조종사는 더 이상 하나의 계기에서 다른 계기로 눈을 돌릴 필요가 없어졌다.
새로운 unusual attitude recovery protection을 통해 조종사가 항공기 자세를 신속하게 판단할 수 있게 되었으며 안전하고 적절하게 자세를 회복 할 수 있게 되었다. PFD에 도입된 커다란 인공 수평선을 통해 상황 인식이 증가하였다. 이 덕분에 scan 도중 항상 자세계가 눈에 들어오게 되었다.
아날로그 계기의 한 가지 문제는 pitch attitude가 90도 위/아래로 증가하였을 때 자세계에 파랑색/갈색만이 나타난다는 것이다.
EFD 자세계는 항상 하늘과 땅이 일부 표시되도록 설계되었다. 이러한 개선을 통해 조종사는 수평선으로 돌아가는 가장 빠른 방법을 알 수 있으며 상황 인식이 크게 향상한다.
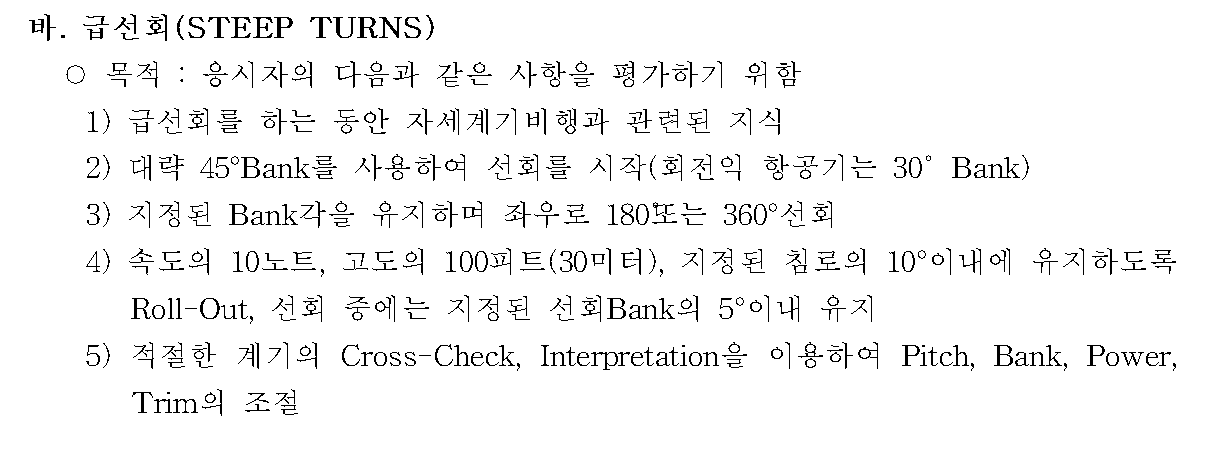
NOTE: 대략 47도 pitch up 자세에서 수평선이 아래로 이동하기 시작한다. 이때 조종사에게 수평 자세로 돌아가는 가장 빠른 방법을 보여주기 위해 갈색 부분이 계속 표시된다. [그림 7-69]
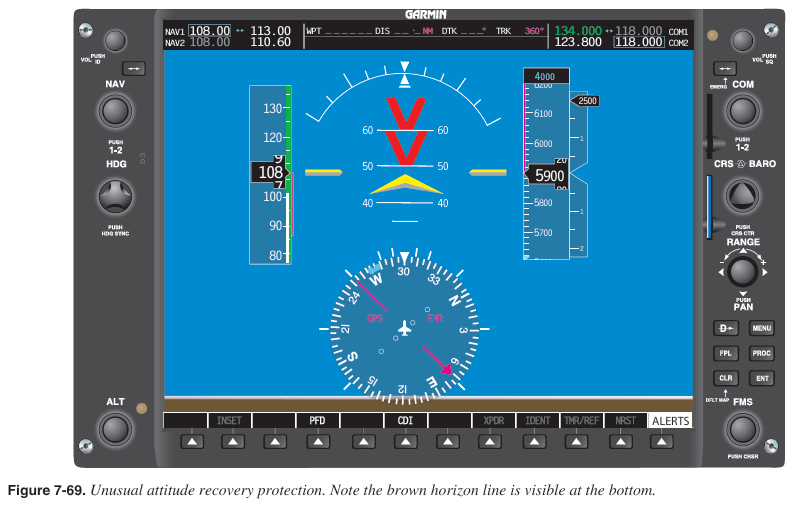
NOTE: 대략 27도 pitch down 자세에서 수평선이 위로 이동하기 시작한다. 이때 조종사에게 수평 자세로 돌아가는 가장 빠른 방법을 보여주기 위해 파란색 부분이 계속 표시된다. [그림 7-70]
자세계의 흰색 선이 수평선이라는 것을 이해해야 한다. 파란색과 갈색 사이의 틈은 참조선일 뿐이므로 이를 인공 수평선으로 간주해서는 안 된다.
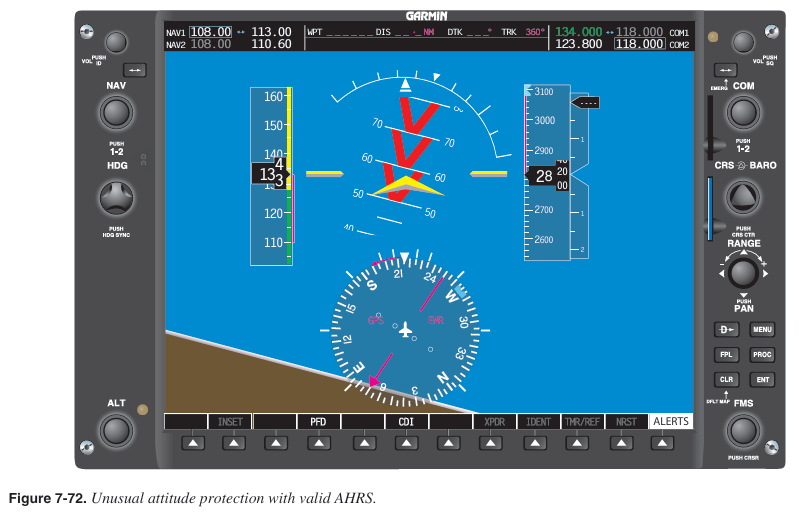
또 다른 중요한 발전은 unusual attitude recovery protection로 이는 PFD 소프트웨어에 내장되어 있으며 AHRS를 통해 구현된다. nose-high unusual attitude가 발생하면unusual attitude recovery protection이red chevrons를 표시한다. 이 chevrons는 자세계의 50도 지점에 위치하며 수평선으로 되돌아가는 방향을 가리킨다. 항공기가 30도 nose-high attitude에 접근하면 chevrons가 보이기 시작한다. 소프트웨어는 자동으로 airspeed, heading, attitude, altimeter, VSI tape, 그리고 trend vectors 만 PFD에 남겨놓고 그 외의 정보들은 삭제한다. pitch attitude가 25도 이하로 떨어지면 삭제되었던 정보들이 다시 나타난다.
nose-low unusual attitudes의 경우에는 15도 nose-down attitude에 접근하였을 때chevrons가 보이기 시작한다. 만약 20도 nose-down attitude로 pitch가 계속 감소하면 unusual attitude recovery protection이 자동으로 불필요한 정보들을 삭제한다. pitch attitude가 15도 이상으로 높아지면 삭제되었던 정보들이 다시 나타난다.
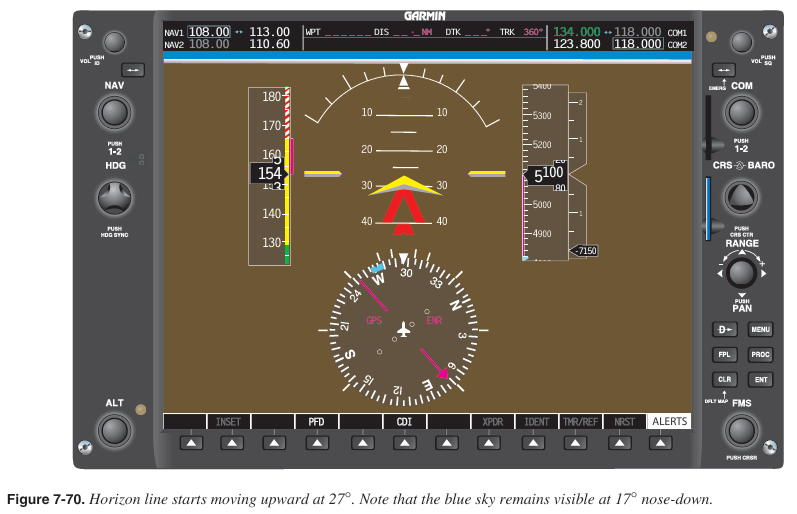
unusual attitude protection을 촉발시키는 bank limit도 있다. 만약 bank가 60도를 초과하면 roll index가 연장되어서 날개를 수평으로 되돌릴 수 있는 최단 방향을 나타낸다. 65도에서는 PFD에 불필요한 정보들이 삭제된다. bank가 60도 이하로 감소하면 삭제되었던 정보들이 다시 나타난다.
그림 7-71에서 항공기가 60도 bank를 초과하였다. bank index의 끝자락에서 연장되는 흰색 선을 확인한다. 이 선은 날개 수평으로 되돌아가는 최단 거리를 나타낸다.
AHRS 장치가 고장나면 unusual attitude protection이 손실되며PFD의 모든 heading 지시와attitude 지시도 손실된다. 또한 roll hold와 attitude hold를 제외한 모든 autopilot 모드들이 손실된다.
다음 그림들은 unusual attitude protection이 상황 인식을 높이고 안전을 향상하는데 얼마나 중요한지를 보여준다.
그림 7-72는 AHRS와 ADC가 정상적으로 작동하는 상태에서의 unusual attitude protection을 보여준다. 아래를 가리키는 red chevrons가nose-high unusual attitude를 나타내며이 덕분에 unusual attitude를 쉽게 인지 및 수정할 수 있다.
NOTE: red chevrons는 level pitch attitude를 가리킨다. trend indicators는 6초 후의 속도와 고도를 나타낸다. heading indicator의 trend indicator는 항공기가 선회하는 방향을 나타낸다. slip/skid indicator는 삼타일치가 유지되고 있는지를 나타낸다. 이 정보들은 항공기가 현재 어떠한 유형의 unusual attitude에 놓여있는지를 판단하는데 도움이 된다.
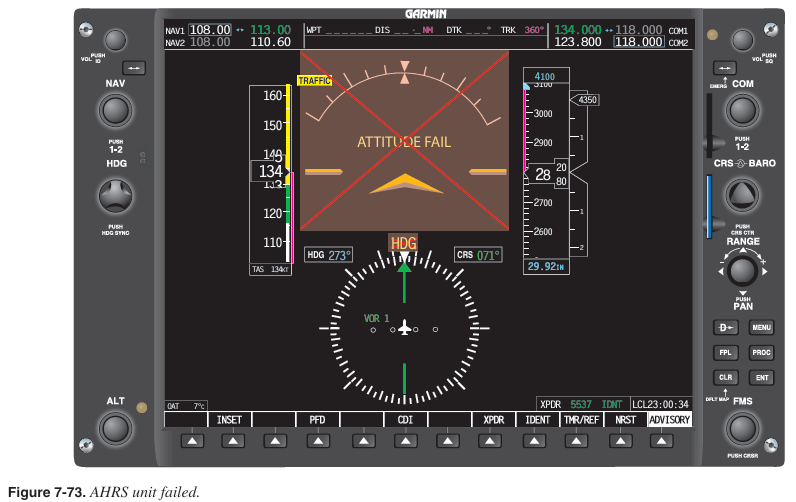
이제 그림 7-73을 보라. 그림 7-72와 동일한 속도가 표시되고 있긴 하지만AHRS가 고장 났다. altimeter와 VSI tape는 항공기가 nose-high attitude를 취하고 있다는 것을 지시하는 유일한 계기이다. 더 이상 표시되지 않는 주요 계기들 중 하나는 slip/skid indicator이다.
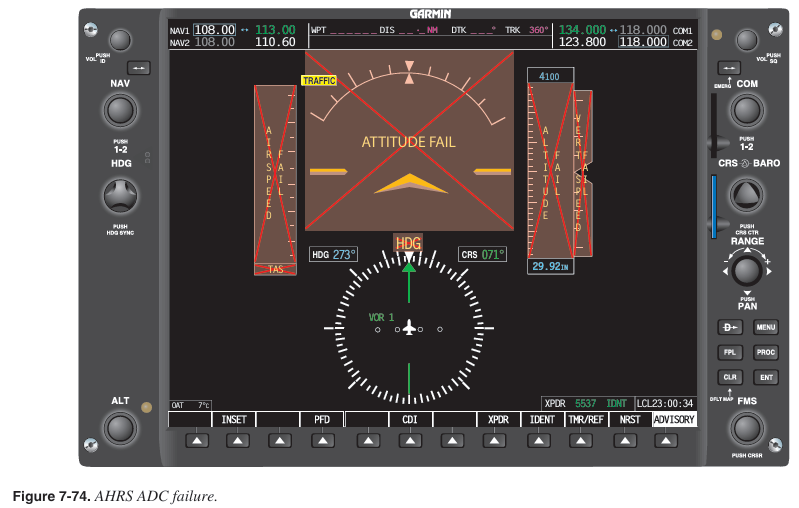
그림 7-74는 AHRS와 ADC가 고장난 상태를 보여준다. 이러한 상황에서는 항공기 자세에 대한 지시가 전혀 나타나지 않는다. 제조업체는 autopilot(wing leveler)을 켜도록 권장한다.
PFD에 표시되는주요 계기들이 고장나면 예비 계기만을 사용할 수 있다. 예비 계기에는 아날로그 속도계, 자세계, 고도계, 그리고 나침반이 있다. 예비 turn coordinator는 설치되어 있지 않다.
극도로 높은 nose-high, nose-low, 혹은 bank angle 상황에서는 아날로그 자세계가 tumble 해서 해당 계기를 사용하지 못할 수도 있다.
Autopilot Usage
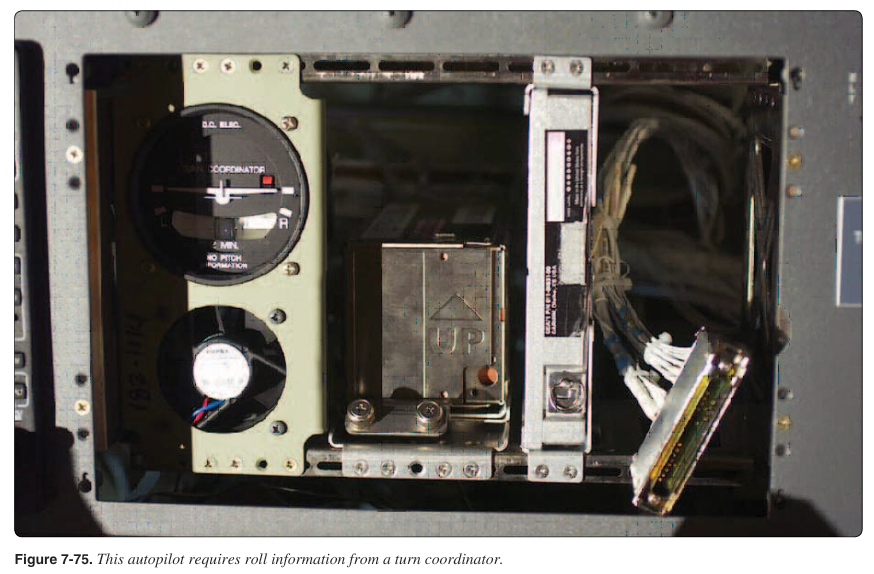
autopilot은 MFD 화면 뒤에 설치된 turn coordinator로부터 입력을 받아서 작동한다. 이 turn coordinator는 오직 autopilot의 roll mode(wing leveler)를 위해 설치된다. 이 기능은 항공기가 unusual attitude 상태에 진입했을 때 조종사를 돕기 위한 것으로 turn coordinator가 고장 나지 않는 한 항상 사용할 수 있다.
NOTE: 조종사는 turn coordinator를 직접 확인할 수 없다. 이 계기는 MFD 패널의 뒤에 장착되어 있다. [그림 7-75]
EFD를 장착한 항공기는 대부분 autopilot이 설치된 상태로 출고된다. 허나 항공기 구매자는 autopilot의 설치 여부를 지정할 수 있다. autopilot이 없는 항공기로 IMC를 비행하고 있는데 AHRS와 ADC가 고장 났다면 극도로 주의를 기울여야 한다.
autopilot을 활용하면 업무량을 줄일 수 있으며이는 조종사가 비행을 모니터링 할 수 있는 시간을 더 제공한다. 또한 autopilot을 사용하면 unusual attitude로 진입할 가능성이 줄어든다.
autopilot이 없는 항공기를 비행하면 조종사들의 업무량이 증가하고 상황 인식이 저하되는 것으로 나타났다.
Common Errors Leading to Unusual Attitudes
다음 오류들이 조종사의 상황 인식을 방해해서 unusual attitudes로 이어질 수 있다.
1. 부적절한 trim 기법. 항공기를 수평비행 상태로 trim하지 않았다면 조종사가 cross-check을 중단하였을 때 순간적인 주의 산만이 비상 상황으로 바뀔 수 있다.
2. 부적절한 CRM(crew resource management) 기법. 모든 single-pilot resource management 업무를 효율적으로 수행하지 못함. CRM과 연관된 사고들의 주요 원인은 조종실을 정리하지 못한데서 비롯된다. 비행에 사용되는 물품들은 손에 닿기 쉽도록 깔끔하게 정리되어 있어야 한다. 조종실이 정리되어 있지 않으면 조종사의 주의가 산만해져서 unusual attitude에 진입할 정도로 cross-check이 중단될 수 있다.
3. 무언가 잘못되었거나 편차가 발생하였다고 인지해서 하나의 계기에 너무 많은 주의를 집중하면fixation이 발생한다. 본인이 인지한 것을 확증하기 위해 여러 계기들을cross-check하는 것이하나의 계기를 확인하는 것보다 더 중요하다는 것을 기억하라.
4. 시각 이외의 감각으로 회복을 시도한다. 본능에 의한 회복은 거의 항상 잘못된 수정으로 이어진다. 이는 계기 비행 도중 일반적으로 발생하는 착각들 때문이다.
5. 기본 자세 계기 비행을 연습하지 못함. 조종사가 장시간 동안 계기 접근 절차나 기본 자세 계기 비행 기동을 수행하지 않으면 실력이 줄어든다. IMC에서 비행하는 것이 능숙하지 않은 조종사는 이를 피해야 한다. 이러한 조종사들은 IMC에 진입하기 전에 교관으로부터 추가 교육을 받아야 한다.
계기만을 참조해서 비행하는 방법을 배우는 이유는 조종사가 VFR 미만의 시정에서 항공기를 조종할 수 있는 능력을 향상시키기 위해서이다. instrument takeoff는 조종사가 배워야 할 중요한 기동들 중 하나이다. 이 기동은 이륙 활주 도중 조종사가 외부 시각 참조물 없이 계기만을 참조해서 항공기를 조종하는 것이다. 연습을 통해 이 기동은 마치 표준율 선회처럼 일상적이게 된다.
instrument takeoff를 연습하는 이유는 외부 참조물에서 비행계기로 눈을 빠르게 움직이는 동안 발생할 수 있는 방향 감각 상실을 줄이기 위해서이다.
현재 EFD 시스템은 synthetic vision을 제공한다. synthetic vision이란 항공기 전방에 놓인 지형을 컴퓨터를 통해 3차원으로 표현한 것이다. 화면에는 활주로, 그리고 GPS 지형 데이터베이스를 기반으로 한 지형이 표시된다. 조종사는 화면에 표시된 활주로를 따라 방향 제어를 유지할 수 있다. 조종사가 화면의 활주로를 따라 움직이면 항공기도 실제 활주로와 정렬된 상태를 유지한다.
(출처: DA40NG G1000 Trainer)
모든 EFD 시스템에 이러한 고급 시스템이 있지는 않다. 이러한 시스템이 없다면 계기 이륙을 위한 표준 절차로 되돌아가야 한다. 항공기마다 기동 절차가 약간 다를 수 있으므로 새로운 장비를 사용하는 경우에는 반드시 훈련을 받아야 한다.
instrument takeoff를 수행하기 위해 nose wheel이나tail wheel이 활주로 중심선과 정렬되도록 항공기를 조종한다.조종사가 view limiting device를 쓰고서 지상 활주를 하는 경우에는 교관의 도움이 필요할 수 있다. tail wheel을을 잠그고(단, 이를 갖춘 경우) 항공기가 움직이는 것을 방지하기 위해 브레이크를 단단히 잡는다. PFD의 heading indicator를 나침반과 대조 검토하고compass card에 기록된 자차(deviation)를 조정한다. runway heading과 가장 가까운 5도 단위로 heading을 설정한다. 이렇게 하면 조종사가 특정 heading으로부터의 편차를 신속하게 감지할 수 있으며 이륙 활주 도중 신속한 수정 조치를 취할 수 있게 된다. GPS의 OBS(omnibearing select) mode를 통해 지시침이 runway heading을 가리키도록 설정한다. 이는 이륙 활주 도중 상황 인식을 더해준다. 방향 제어를 위한 충분한 rudder authority가 생성될 수 있도록 출력을 부드럽게 적용한다. 브레이크를 놓아주고 이륙 설정을 향해 계속해서 출력을 높인다.
heading 편차가 발생하면 즉시 수정되어야 한다. 방향 제어를 위해 브레이크를 사용하면 이륙 활주가 길어질 뿐만 아니라 항공기가 과조작될 가능성이 있으므로 이를 피한다.
항공기가 가속하는 동안 ASI와 heading indicator를 계속해서 cross-check 한다. 항공기가 rotation speed까지 15 ~25노트 남았을 때 aft elevator pressure를 부드럽게 가해서 pitch attitude를 takeoff attitude(소형 비행기 경우 보통 약 7도)로 높인다. pitch attitude를 일정하게 유지한 상태에서 계기들을 계속해서 cross-check 하고 항공기가 자연스럽게 이륙하도록 만든다. 항공기를 강제로 부양시키려 하지 않는다. 항공기를 강제로 부양시키려 하면 P-Factor로 인해 좌선회 경향이 발생해서 항공기가 좌측으로 yaw하며 이륙이 불안정해진다.
자세계를 통해 적절한 pitch와bank를 유지하고 VSI tape을 cross-check해서positive rate of climb을 확인한다. altimeter trend indicator의 자홍색 선(6초 후의 고도)을 확인한다. trend는 양(+)의 값을 나타내야 한다. 난기류가 없다면 모든 trend 값들이 안정화되어야 한다. 이때 만약 속도가 일정하게 유지되고 있다면 airspeed trend indicator가 표시되지 않아야 한다. airspeed trend indicator가 표시되고 있다면 pitch attitude가 유지되지 않고 있으며 따라서 속도가 변화하고 있다는 것을 나타낸다. 일정한 대기속도 및 수직 속도로 상승하는 것이 이상적이다. pitch를 위한 primary instrument로 속도계를사용한다.
항공기가 안전 고도(엔진 고장 발생 시 착륙을 위한 활주로가 충분하지 않은 경우 대략 100ft)에 도달하였다면 landing gear와 flaps를 올린다. 이때 적절한 pitch를 유지하기 위해 속도계와 자세계를 참조한다. 외장이 변경되면 적절한 pitch attitude를 유지하기 위해 aft control pressure를 증가시켜야 한다. 외장 변경을 보상하기 위해 aft control pressure를 부드럽게 증가시킨다. 이러한 변화들을 예상하고 cross-check 속도를 높인다. VSI tape이 일정하게 유지되는 동안 airspeed tape와 altitude tape가 증가한다. 항공기가 적절한 상승 속도로 가속하도록 허용한다. 적절한 상승 속도에 도달하였다면 POH/AFM에 게재된 상승 출력 설정으로 출력을 줄인다. 조종간 압력을 없애기 위해 항공기를 trim 한다.
Common Errors in Instrument Takeoffs
instrument takeoff와 관련된 일반적인 오류에는 다음이 포함되나 이에 국한되지는 않는다:
1. 이륙 전에 조종실 점검을 충분히 수행하지 않음. 조종사들의 부주의로 인해 속도계가 작동하지 않는 상태에서(pitot tube 막힘), 조종간이 잠긴 상태에서,그리고 기타 실수들이 존재하는 상태에서instrument takeoff가 시도되었다. 최대한 빨리 속도계를 cross-check 하는 것이 중요하다. 일부 시스템에서는 20노트의 진대기속도가 발생하기 전까지 속도가 표시되지 않는다.
2. 활주로 정렬이 부적절함. 이는 브레이크를 부적절하게 적용해서 항공기가 조금씩 움직일 때, 혹은 nosewheel이나 tailwheel이 활주로 중심선과 정렬되지 않았을 때 발생할 수 있다. 어떤 경우든 이륙이 시작될 때 방향 제어 문제가 발생한다.
3. 출력을 부적절하게 적용함. 갑작스럽게 출력을 적용하면 방향 제어가 복잡해진다. 대략 3초 이내에 이륙 출력에 도달할 수 있도록 부드럽고 연속적으로 출력을 적용해야 한다.
4. 브레이크를 부적절하게 사용함. 좌석이나 rudder pedal을 잘못 조정한 상태에서 발이 불편하게 놓이면 실수로 브레이크를 밟아서 과도한 heading 변화가 발생하는 경우가 많다.
5. rudder pedals를 과조작함. 이러한 실수는 heading 변화를 늦게 인지하거나, 조종간에 긴장이 가해지거나, heading indicator를 잘못 해석해서 잘못된 방향으로 수정을 적용하거나, 항공기가 가속함에 따라 rudder의 효율성이 증가한다는 것을 인식하지 못하거나, 기타 요인들로 인해 발생할 수 있다. rudder의 미세한 움직임을 통해 heading 변화를 즉시 수정하면 swerving 경향이 줄어들 수 있다.
6. 이륙 후에 자세를 유지하지 못함. 비행기가 이륙할 때 조종사가 육감과 경험에 의해 반응하면 pitch가 어림짐작으로 제어된다. trim 변화에 대한 반응에 따라 조종사는 pitch가 과도하게 올라가는 것을 허용하거나 과도한 forward-elevator pressure를 가할 수 있다.
7. cross-check가 부적절함. trim을 변경할 때, 자세를 변경할 때, gear와 flap을 올림 때, 그리고 출력을 변경할 때 fixations가 발생할 수 있다. 새로운 입력이 적용되었다면 계속해서 cross-check을 수행하고 해당 입력의 영향을 확인한다.
8. 계기 해석이 부적절함. 계기의 지시를 이해하지 못하였다는 것은 기동에 대한 추가 공부가 필요함을 의미한다.