5-4-9. Procedure Turn and Hold-in-lieu of Procedure Turn
a. procedure turn은 intermediate approach course나 final approach course로 inbound 하기 위해선 방향을 역전시켜야 하는 경우 사용되는 기동이다. 접근 차트에 procedure turn이나 hold-in-lieu-of-PT가 표시된 경우 이는 필요한 기동이다(단, ATC가 straight-in approach를 승인한 경우 제외). 또한 initial segment에 “No PT” 기호가 표시되어 있거나, final approach course를 향해 RADAR VECTOR가 제공되고 있거나, 혹은 holding fix에서 timed approach를 수행하는 경우에는 procedure turn이나 hold-in-lieu-of-PT가 허용되지 않는다. procedure turn에 대해 규정된 고도는 항공기가 inbound course에 설정되기 전까지 지켜야 할 최소 고도이다. 이 기동은 profile view에서 지정된 거리 이내에서 완료되어야 한다. hold-in-lieu-of-PT의 경우 holding pattern 방향이 차트와 일치되도록 비행 되어야 한다. 또한 지정된 구간 길이/시간을 초과하여서는 안 된다.
NOTE-
절차로부터 procedure turn이나 hold-in-lieu-of-PT가 요구되지 않더라도 조종사는 이를 사용할 수 있다. 그러나 우선 ATC로부터 amended clearance를 받아야 한다. ATC clearance가 procedure turn을 수행하라는 것인지, 혹은 straight-in approach를 수행하라는 것인지에 대해 확실하지 않은 경우 조종사는 즉시 ATC에 설명을 요청해야 한다(14 CFR Section 91.123).
1. 미국 정부 차트의 경우 미늘 모양의 화살표가 procedure turn이 이루어지는 outbound course의 maneuvering side를 나타낸다. 45 degree type procedure turn을 통해 course reversal을 위한 heading을 제공한다. 그러나 선회를 시작할 지점, 그리고 선회의 유형과 선회율은 조종사의 재량에 달려있다(단, 차트에 표시된 remain within xx NM distance에 의해 제한됨). 45 degree procedure turn, racetrack pattern, teardrop procedure turn, 혹은 80 degree ↔ 260 degree course reversal을 사용할 수 있다. maneuvering side에 대부분의 보호 공역이 배치되므로 racetrack entry 도중 이쪽으로 기동이 수행되어야 한다. 만약 entry가 조종사를 PT의 non-maneuvering side에 놓이게 만들었다면 outbound course 교차를 위한 수정을 적용하여 보호 구역 내로 되돌아간다. 일부 procedure turns는 procedural track으로 지정된다. 이러한 turns는 차트에 표시된 대로 정확하게 수행되어야 한다.
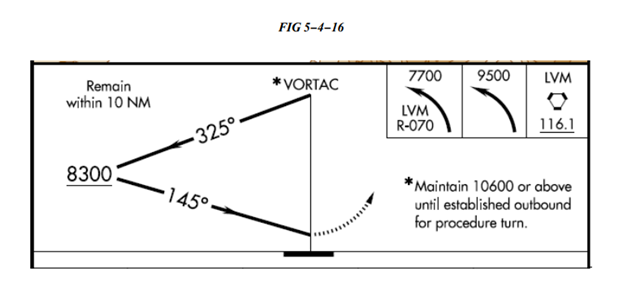
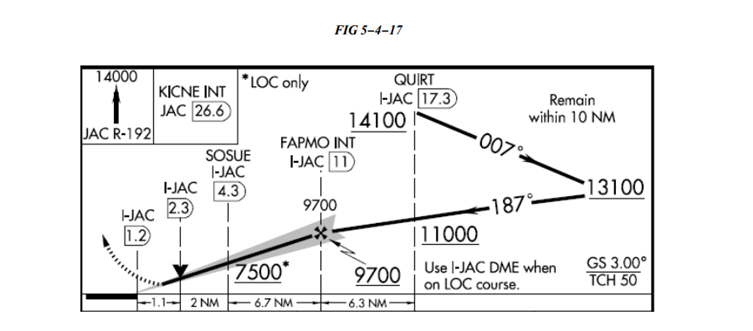
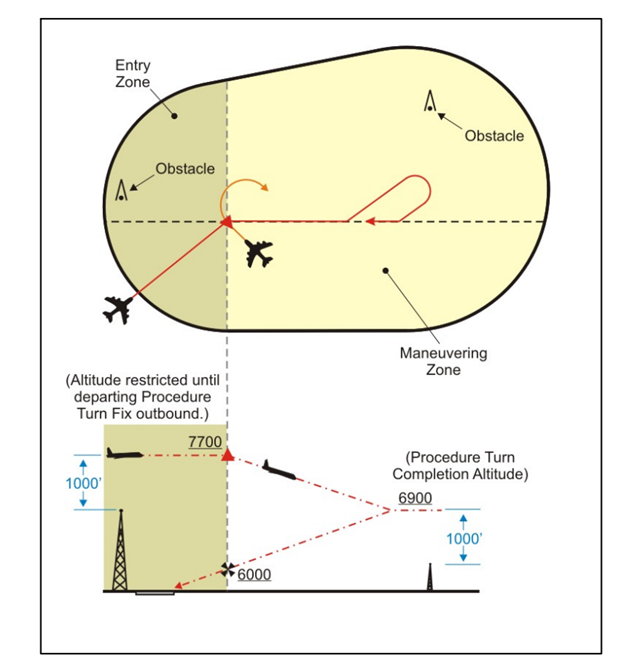
2. PT fix를 통과, 혹은 abeam 한 이후 outbound를 수행하기 전까지는 PT fix altitude(차트에 게재된, 혹은 ATC로부터 할당받은)에서 PT completion altitude로 하강해서는 안 된다. 일부 절차는 차트의 profile view에 “Maintain (altitude) or above until established outbound for procedure turn”이라는 note를 포함한다(그림 5-4-16 참조). 최신 절차의 경우 note가 없는 대신 PT fix에 단순히 “at or above” altitude만을 표시할 것이다(그림 5-4-17 참조). 이들은 procedure turn entry zone에 필요한 장애물 회피를 제공하기 위한 것이다(그림 5-4-18 참조). note가 없는 경우, 혹은 PT fix 주변에 minimum altitude가 명시되지 않은 경우 이는 비행 방향에 상관없이 PT fix를 통과하자마자 procedure turn altitude로 즉시 하강할 수 있음을 의미한다. 왜냐하면 PT entry zone에서의 minimum altitudes와 PT maneuvering zone에서의 minimum altitudes가 같기 때문이다.
3. 접근 절차가 procedure turn을 포함하는 경우 course reversal IAF를 통과하는 시점부터 procedure turn 내내 최대 200노트(IAS)를 준수해야 한다. 이는 장애물 회피 구역을 벗어나지 않기 위함이다. 조종사는 procedure turn fix를 통과한 이후 즉시 outbound turn을 시작해야 한다. procedure turn은 profile view에 명시된 거리 이내에서 수행되어야 한다. 일반적인 procedure turn 거리는 10마일이다. 이는 오직 Category A 항공기만 운영되는 곳에서는 최소 5마일로 감소할 수 있다. 혹은 이는 high performance aircraft를 수용하기 위하여 15마일까지도 증가할 수도 있다.
4. 일부 절차의 경우 course reversal을 위해 teardrop procedure나 penetration turn이 지정될 수 있다. teardrop procedure는 initial approach fix에서 outbound course로 향한 후 intermediate fix/point에서, 혹은 intermediate fix/point 이전에 inbound course를 교차하도록 선회하는 것으로 구성된다. 이는 한정된 공역 내에서 항공기 방향을 전환시키며 상당한 고도를 감소시킨다. intermediate segment의 시작점을 표시하는 fix가 없는 경우 intermediate segment는 final approach fix로부터 10마일 이전에 시작된다고 가정해야 한다. 항법시설이 공항에 위치하는 경우 항공기는 penetration turn을 완료하였을 때 final approach에 있는 것으로 간주된다. 그러나 final approach segment는 항법시설로부터 10마일 떨어진 final approach course에서 시작된다.
5. 일부 절차의 경우 course reversal을 위해 holding pattern in lieu of procedure turn이 지정될 수 있다. 이때 holding pattern이 intermediate fix나 final approach fix 상공에 설정된다. profile view에 명시된 holding pattern 거리나 시간을 준수해야 한다. hold-in-lieu-of-PT의 경우 차트에 표시된 대로 holding pattern 방향을 비행해야 하며 leg length/timing을 초과해서는 안 된다. holding patterns에 대해 규정된 maximum holding airspeed 제한이 여기에도 적용된다. 적절한 entry를 수행한 후 항공기가 inbound course에 설정되었을 때 holding pattern 기동이 완료된다. holding fix로 되돌아가기 전에 접근을 승인받았으며 항공기가 규정된 고도에 있는 경우 추가적인 holding pattern이 필요하지 않다. 만약 조종사가 많은 고도를 깎기 위해, 혹은 course를 더 제대로 설정하기 위해 holding pattern을 더 비행하기로 선택하였다면 approach clearance를 받는 즉시 ATC에게 이를 알려야 한다.
6. 특정 intermediate fix에서 final approach fix까지 일직선으로 접근할 수 있는 경우 procedure turn이 필요하지 않다. 이때 procedure turn이 필요하지 않음을 나타내기 위해 적절한 course와 altitude가 “NoPT”라는 단어와 함께 사용된다. 만약 procedure turn을 원한다면, 그리고 ATC가 이를 허가해 준다면 항공기가 inbound course에 설정되기 전까지는 procedure turn altitude 아래로 하강해서는 안 된다. 왜냐하면 몇몇 NoPT altitudes는 procedure turn altitudes보다 낮을 수 있기 때문이다.
b. Limitations on Procedure Turns
1. final approach course를 향해 radar vector가 제공되는 경우, holding fix에서 timed approach를 수행하는 경우, 혹은 절차가 NoPT를 명시하는 경우 조종사는 procedure turn을 수행할 수 없다(단, final approach clearance를 받았을 때 조종사가 procedure turn을 요청하였으며 ATC가 이를 허가한 경우는 제외).
2. teardrop procedure turn이 차트에 표시되어 있으며 course reversal이 필요하다면 이 유형의 turn을 반드시 수행해야 한다.
3. holding pattern in lieu of procedure turn이 사용되는 경우 holding pattern을 반드시 따라야 한다(단, RADAR VECTORING이 제공되는 경우, 혹은 approach course에 NoPT가 표시된 경우 제외). 권장 entry 절차는 항공기가 holding pattern의 보호 구역 내를 유지하도록 보장할 것이다. procedure turn과 마찬가지로 항공기가 inbound course에 설정되기 전까지는 minimum holding pattern altitude에서 final approach fix altitude로 하강할 수 없다. holding pattern in lieu of procedure turn이 설정된 경우 maximum holding pattern airspeeds가 적용된다.
REFERENCE -
AIM, Paragraph 5-3-8 j2, Holding
4. plan view에 procedure turn의 미늘 모양 화살표가 없는 경우 이는 해당 절차에 대해 procedure turn이 인가되지 않음을 의미한다.
a. TIMED APPROACHES(시간차접근)는 다음 조건들이 만족되어야 수행될 수 있다:
1. 접근이 수행되는 공항의 관제탑이 운영 중이어야 한다.
2. 관제탑에 교신하라는 지시를 받기 전까지는 center나 approach 관제사와 직접 교신을 유지해야 한다.
3. 만약 두 개 이상의 실패 접근 절차를 이용할 수 있다면 모든 실패 접근 절차들에 course reversal이 없어야 한다.
4. 만약 하나의 실패 접근 절차만을 이용할 수 있다면 다음 조건들이 만족되어야 한다:
(a) course reversal이 없어야 한다.
(b) 보고된 ceiling과 visibility가 IAP에 규정된 가장 높은 circling minimums 이상이어야 한다.
5. 접근을 승인받았다면 조종사는 procedure turn을 수행해서는 안 된다. (14 CFR Section 91.175.)
b. 관제사는 “time approaches are in use”라 특별히 명시하지는 않는다. 허나final approach fix [비정밀 접근]를 떠나는 시간이나outer marker(혹은outer marker 대신 사용되는 fix) [정밀 접근]를 떠나는 시간을 할당받았다는 것은 timed approach procedures가 시행중임을 나타낸다. 관제사가 holding 대신에 Final Approach Course로 향하는 radar vectors를 사용할 수도 있다.
c. 접근 순서를 기다리는 각 조종사들은 holding point를 떠나야 하는 시간에 대해 사전 통지를 받는다. holding point를 떠나야 하는 시간을 수신하였다면 조종사는 최대한 그 시간에 fix를 떠나도록 비행경로를 조정해야 한다. (그림 5-4-19 참조.)
EXAMPLE -
현재 시간은 12:03이다. 체공 중인 조종사에게 fix를 12:07에 떠나라는 지시가 내려졌다. 이때 조종사는 outbound end에서의 선회를 마치고 fix를 향하여 inbound 하고 있었다. fix를 다시 통과하였을 때 조종사는 현재 시간이 12:04임을 확인하였다. 12:07에 fix를 떠나기 위해서는 3분이 더 필요하다. 남은 시간이 2분을 초과하므로 조종사는 360도 선회가 아닌 race track pattern을 비행하기로 계획한다. race track pattern의 각 선회들은 총 2분을 소모한다. 선회에 필요한 2분을 빼고 1분이 남는다. fix inbound로 돌아가기 위해선 두 구간에서의 직진 비행이 필요하므로 조종사는 남은 1분을 절반으로 줄인다. 그리고 final approach 상의 fix로 되돌아가는 선회를 시작하기 전에 outbound에서 30초간 비행하기로 계획한다. 만약 무시해도 될 정도의 바람이 불고 있다면 이 절차는 정확히 12:07에 fix inbound를 통과하게 만들 것이다. 그러나 final approach에서 정풍이 예상된다면 조종사는 30초의 outbound course를 약간 줄여줘야 한다. outbound 도중 바람은 항공기를 더 빠르게 fix로부터 벗어나게 만드며반면 fix로 돌아올 때는 ground speed를 감소시킬 것이다. 만약 final approach에서 배풍이 예상된다면 조종사는 30초의 outbound heading을 약간 늘려줘야 한다. outbound 도중 바람은 항공기를 더 천천히 fix로부터 벗어나게 만드며반면 fix로 돌아올 때는 ground speed를 증가시킬 것이다.
a. radar approaches를 위해 필요한 유일한 공중 무선 장비는 교신 송수신기이다. radar controller는 항공기가 활주로 중심선에 정렬되도록 vector를 제공한다. 조종사가 지상의 시각 참조물을 통해 접근 및 착륙을 완료하기 전까지는 관제사로부터 vector가 계속 제공된다. radar approaches에는 두 가지 형식이 있다: Precision(PAR)과 Surveillance(ASR).
b. radar approach는 모든 항공기에게 제공될 수 있다. 또한 radar approach는 재난(distress) 상황인 조종사를 위해서, 혹은 항적을 신속히 처리하기 위해서 제공될 수도 있다. 허나 ASR의 경우 ATC 운영 조건이 있지 않은 한, 혹은 비정상 상황이나 비상 상황이 아닌 한 승인되지 않을 수도 있다. 조종사가 PAR이나 ASR을 승인한다고 해서 해당 공항에 대해 규정된, 혹은 특정 항공기 운영자에 대해 규정된 weather minimums가 면제되는 것은 아니다. 보고된 기상이 minimums 미만인 경우 radar approach를 수행할 결정은 조종사에게 달려 있다.
c. PAR minimums와 ASR minimums는 FAA Terminal Procedures Publications(TPP)의 별도 페이지에 게재된다.
1. Precision Approach (PAR). PAR은 관제사가 조종사에게 방위각과 고도에 대해 매우 정확한 항법 안내를 제공하는 것이다. 조종사는 착륙 활주로의 연장선에 항공기가 정렬되도록 headings를 제공받는다. 조종사는 glidepath 교차가 이루어지기 약 10 ~ 30초 전에 이를 예상하라 조언받는다. 그리고 하강이 시작될 때 지시를 받는다. 조종사가 요청한 경우에만 Decision Height가 제공된다. 항공기가 glidepath로부터 위나 아래로 벗어나는 것이 확인될 경우 관제사는 “slightly”, 혹은 “well”이라는 용어를 통해 조종사에게 상대적 편차를 제공한다. 조종사는 glidepath로 돌아가기 위해 항공기의 상승률/하강률을 조절해야 한다. 항공기의 고도와 관련하여 추세 정보 또한 발부된다. 이는 “rapidly”와 “slowly”라는 용어를 통해 수식될 수 있다(예를 들어 “well above glidepath, coming down rapidly”). touchdown으로부터의 거리는 적어도 1마일마다 한 번씩 제공된다. 항공기가 방위각 및/혹은 고도에 대해 지정된 안전 한계를 벗어났으며 이 한계를 계속 벗어나는 것이 확인될 경우 관제사는 조종사로 하여금 실패 접근을 수행하도록, 혹은 특정 경로를 비행하도록 지시한다(단, 조종사가 활주로, 접근 등화 등등과 같은 runway environment를 확인한 경우 제외). 항공기가 Decision Height(DH)에 도달하기 전까지는 방위각과 고도에 대한 항법 안내가 조종사에게 제공된다. 그리고 항공기가 threshold를 통과하기 전까지는 관제사가 advisory course andglidepath 정보를 제공한다. 이때 만약 항공기가 활주로 중심선으로부터 조금이라도 벗어나 있다면 조언을 받는다. 접근이 완료되면 레이더 서비스는 자동으로 종료된다.
2. Surveillance Approach (ASR). ASR은 관제사가 방위각 항법 안내만을 제공하는 것이다. 조종사는 착륙 활주로의 연장선에 항공기가 정렬되도록 headings를 제공받는다. surveillance approach에서 사용되는 레이더 정보는 precision approach에서 사용되는 것보다 덜 정확하다. 따라서 접근의 정확도가 높지 않으며 더 높은 minimums가 적용된다. 고도 정보가 제공되지는 않지만 언제 MDA(Minimum Descent Altitude)로 하강할지, 혹은 해당하는 경우 언제 intermediate step-down fix Minimum Crossing Altitude로 하강할지와 언제 MDA로 하강할지를 조언 받을 것이다. 또한 조종사는 MAP(Missed Approach Point)의 위치를 조언 받을 것이다. 그리고 활주로, 공항, 헬리포트, 혹은 MAP로부터 1마일마다 항공기 위치를 조언 받을 것이다. 조종사 요청 시 절차에 대해 설정된 descend gradient를 기반으로 MDA 이상의 recommended altitudes가 1마일마다 발부될 것이다. 일반적으로 항공기가 MAP에 도달하기 전까지 항법 안내가 제공된다. 조종사가 MAP에서 활주로나 공항/헬리포트를 확인하지 못하였다면 관제사는 안내를 종료하고 실패 접근을 수행하도록 지시한다. 또한 접근 도중 안전한 안내를 제공할 수 없다고 판단한 경우 관제사는 조종사에게 실패 접근을 수행하라 지시할 것이다. 마찬가지로 조종사 요청 시에도 실패접근이 수행될 수 있다. 접근 도중 조종사는 본인의 판단에 따라 언제든 실패 접근을 수행할 수 있다. civil aircraft에 한해서 조종사가 활주로나 공항/헬리포트를 확인하였다고 보고한 경우, 혹은 더 이상 안내가 필요하지 않다고 달리 명시한 경우 관제사는 안내를 종료할 수 있다. 접근이 완료되면 레이더 서비스는 자동으로 종료된다.
NOTE-
하강을 시작하기 전에 straight-in approaches를 위한 MDA가 조종사에게 발부될 것이다. surveillance approach가 circle-to-land maneuver로 종료될 경우 조종사는 항공기의 approach category를 관제사에게 알려야 한다. 이 경우 관제사는 적절한 MDA를 조종사에게 제공할 것이다.
3. NO-GYRO Approach. 이 접근은 directional gyro, 혹은 그 외 stabilized compass가 작동하지 않거나 부정확할 때 레이더 관제 하에 놓인 조종사가 이용할 수 있다. 이 경우 조종사는 ATC에게 상황을 알린 다음 No-Gyro vector나 No-Gyro approach를 요청해야 한다. directional gyro나 그 외 stabilized compass를 장비하지 않은 항공기의 조종사가 레이더 관제를 원하는 경우에도 No-Gyro vector나 No-Gyro approach를 요청할 수 있다. 조종사는 모든 선회를 표준율로 수행해야 하며 지시를 받는 즉시 선회를 수행해야 한다. 예를 들어, “TURN RIGHT,” “STOP TURN.” surveillance approach나 precision approach를 수행하는 경우 final approach를 향하여 선회한 이후에는 모든 선회를 반표준율로 수행하라 조언 받을 것이다.
a. 공동 사용 기지(민간 및 군)와 군사 기지에서 FAA와 군사 서비스에 의해 운영되는 PAR 시설은 계기 접근 중인 항공기를 모니터링 하며 조종사에게 radar advisory를 발부한다. 이는 기상이 VFR minimums(1,000 및 3) 미만인 경우, 야간인 경우, 혹은 조종사가 요청한 경우에 제공된다. 이러한 서비스는 PAR Final Approach Course가 항법 보조 장치의 final approach와 일치하며 PAR이 운영 중인 경우에만 제공된다. 조종사가 항법 보조 장치를 접근의 주요 수단으로 선택하였으므로 이러한 radar advisory는 보조 지원 역할만을 수행한다.
b. final approach를 시작하기 전에 조종사는 advisory를 받을 주파수를 제공받는다. 어떠한 이유에서든 radar advisory가 발부될 수 없다면 이 또한 조종사에게 제공된다.
c. 레이더를 통해 얻은 advisory 정보에는 다음이 포함된다:
1. final approach fix inbound(비정밀 접근)를 통과하는 것. 혹은 outer marker나 outer marker inbound 대신 사용되는 fix(정밀 접근)를 통과하는 것.
NOTE-
이때 조종사는 접근 등화나 활주로 확인 시 보고하도록 요청받을 수 있다.
2. 레이더에 표시된 고도 및/혹은 방위 위치, 그리고 항공기의 움직임에 대한 추세 정보가 제공된다.
NOTE-
PAR 안전 한계에 근접할 경우 조종사는 항공기가 glidepath로부터 well above/below 상태임을, 혹은 course로부터 well left/right 상태임을 조언 받는다. glidepath 정보의 경우 정밀 접근(예를 들어 ILS)을 수행하는 항공기에게만 제공된다. 정밀 접근 이외의 방식을 수행하는 항공기에게는 고도 정보가 전달되지 않는다. 왜냐하면 그러한 접근들의 하강 구간은 보통 PAR glidepath와 일치하지 않기 때문이다.
3. 반복되는 advisory에도 불구하고 항공기가 PAR 안전 한계를 벗어난 경우, 혹은 급격한 편차가 확인된 경우 조종사에게 실패 접근을 수행하라 알린다(단, 조종사가 지표면의 시각 참조물을 확인한 경우 제외).
5-4-13. Simultaneous Approaches to Parallel Runways
a. ATC procedures는 두 개의, 혹은 세 개의 parallel runways를 향한 ILS/RNAV/GLS 계기 접근 운영을 허용한다. parallel runways를 향한 ILS/RNAV/GLS approaches는 세 가지 종류로 구분된다: Simultaneous Dependent Approaches, Simultaneous Independent Approaches, Simultaneous Close Parallel PRM Approaches. simultaneous operations에 대해 승인된 RNAV 접근 절차는 위치 업데이트를 위한 센서로 GPS를 필요로 한다. VOR/DME, DME/DME, 그리고 IRU RNAV 업데이트는 승인되지 않는다. parallel runway approach procedure는 adjacent parallel runway 중심선 간격, ATC procedures, 그리고 ATC final approach 레이더 모니터링 및 교신 기능에 따라 분류된다. 일부 공항에서는 하나 이상의 접근 경로가 최대 3도까지 오프셋 될 수 있다. offset localizer를 갖춘 ILS 접근은 Category II/III 기능을 상실하며 decision altitude/height가 증가한다(50ft).
b. 기상 상황, 항적의 양, 그리고 입항에 활용되는 활주로들의 특정 조합에 따라 활주로를 다양한 유형의 simultaneous operations(closely spaced dependent approach나 closely spaced independent approach 포함)에 활용할 수 있다. 조종사는 본인이 수행 중인 운영의 유형을 이해해야 한다. 그리고 필요한 경우 ATC에 설명을 요청해야 한다.
c. parallel approach operations를 위해선 조종사는 상황 인식을 높여야 한다. 다음과 같은 정보들을 중점으로 Approach Procedure Chart를 철저히 검토해야 한다: 접근의 번호 및 명칭, localizer 주파수, inbound localizer/azimuth course, glideslope/glidepath intercept altitude, final approach fix에서의 glideslope crossing altitude, decision height, missed approach instructions, special notes/procedures, 그리고 할당받은 활주로의 위치/인접 활주로와의 근접성. 조종사는 ATC를 통해, 혹은 ATIS를 통해 simultaneous approaches가 현재 사용 중임을 알림 받는다.
d. simultaneous independent approaches(특히 simultaneous close parallel PRM approaches)를 수행하는 항공기는 모든 ATC clearances를 철저히 준수해야 한다. ATC가 할당한 대기속도, 고도, 그리고 headings를 준수해야 한다. autopilot coupled approaches를 위해선 ATC instructions를 준수하는데 필요한 절차에 대해 알아야 한다. simultaneous independent approaches(특히 simultaneous close parallel PRM approaches)는 정밀한 approach course tracking을 필요로 한다. 이는 final monitor controller의 개입을 최소화하기 위해, 그리고 원치 않는 NTZ(No Transgression Zone) 침범을 최소화하기 위함이다. 혹시라도 breakout이 일어난다면 ATC는 minimum vectoring altitude 미만의 고도를 할당하지 않는다. 항공기나 항법 시스템의 성능 저하 발생 시 조종사는 즉시 ATC에 알려야 한다.
e. simultaneous independent operation 도중, 그리고 simultaneous close parallel PRM approach operation 도중에는 철저한 radio discipline이 필수적이다. 여기에는 경보를 감청하는 것, 그리고 불필요하고 장황한 무선 교신을 삼가는 것을 포함한다. 다른 항공기를 위한 clearance를 수행하지 않기 위해선 올바른 호출 부호에 주의를 기울여야 한다. 유사한 호출 부호를 가진 항공기와의 혼동을 방지하기 위해선 축약된 호출 부호를 사용하지 않아야 한다. 조종사는 무선 수신기의 비정상적 침묵 시간, 혹은 비정상적 배경음을 주의해야 한다. stuck microphone은 tower 주파수에서의 final approach controller instructions를 방해할 수 있다. PRM approaches에서 monitor controller가 두 번째 주파수를 사용할 경우 “stuck mike”나 그 외의 tower 주파수 방해를 완화할 수 있다.
REFERENCE-
AIM, Chapter 4, Section 2, Radio Communications Phraseology and Techniques, gives additional communications information.
f. TCAS(Traffic Collision Avoidance Systems)는 parallel approach operations에 대한 추가적 안전 요소를 제공한다. 조종사는 비행 매뉴얼, 장비 제조업체의 권장 사항, 전문 회보, 그리고 FAA 간행물에 제시된 TCAS 운영 절차를 따라야 한다.
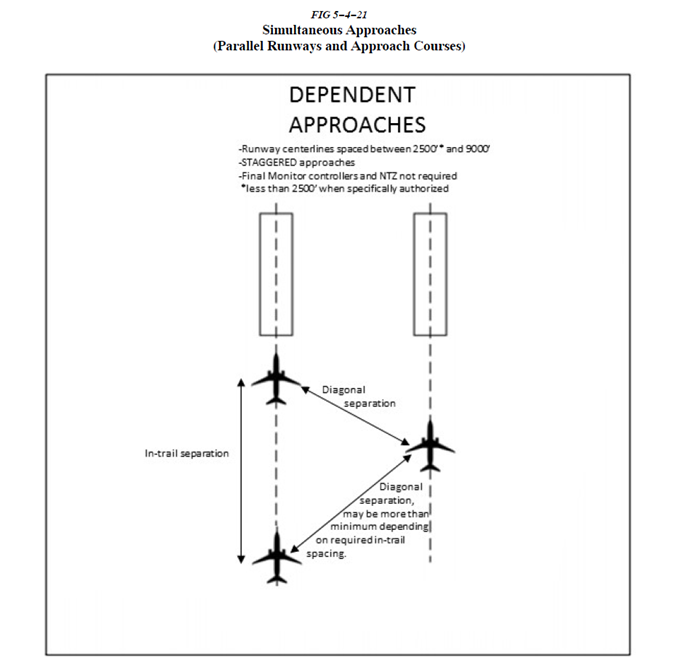
a. simultaneous dependent approaches는 중심선이 2,500ft ~ 9,000ft로 분리된 parallel runway를 갖춘 공항으로 향하는 ATC procedure이다. 전체 시스템의 구성 요소로는 ILS(혹은 접근 항법을 제공하는 그 외의 시스템), 레이더, 교신, ATC procedures, 그리고 required airborne equipment가 있다. 항공기의 RNAV 장비, 혹은 지상 및 항공기의 GLS 장비는 required airborne equipment와 ground based ILS equipment를 대체할 수 있다. 조종사는 chart note에서 특별히 승인하는 절차만을 사용해야 한다. 예를 들어 “LNAV NA during simultaneous operations”라는 chart note는 vertical guidance를 필요로 한다. 선택권이 주어질 경우 조종사는 항상 precision approach를 비행해야 한다.
b. simultaneous dependent approach는 다음과 같은 점에서 simultaneous independent approach와 다르다: parallel runway 중심선들 사이의 최소 거리가 줄어들 수 있음, 레이더 모니터링이나 조언에 대한 필요조건이 없음, adjacent final course에 놓인 항공기와의 staggered separation이 필요함.
c. 활주로 중심선들이 2,500ft ~ 3,600ft로 분리된 경우 adjacent final approach course에 놓인 다음 항공기와 최소 1.0NM의 대각선 레이더 분리가 필요하다. 활주로 중심선들이 3,600ft ~ 8,300ft로 분리된 경우에는 adjacent final approach course에 놓인 다음 항공기와 최소 1.5NM의 대각선 레이더 분리가 필요하다. 활주로 중심선들이 8,300ft ~ 9,000ft로 분리된 경우에는 최소 2NM의 대각선 레이더 분리가 제공된다. 활주로 끝단으로부터 10NM 이내에서 동일한 final approach course에 놓인 항공기는 최소 3NM(특정 경우에는 2.5NM)의 레이더 분리를 제공받는다. 또한 parallel final approach course로 선회하는 항공기들 사이에 최소 1,000ft의 수직 분리가, 혹은 최소 3마일의 레이더 분리가 제공된다.
d. parallel approaches가 사용 중인 경우 ATC나 ATIS는 두 활주로에 대한 접근이 사용 중임을 조종사에게 알린다. 또한 IAP는 어떤 활주로들이 동시에 사용될 수 있는지를 표기한다. 분리 책임이 tower에 위임되지 않은 곳의 경우 radar controller는 tower controller와 교신할 인터폰 기능을 갖추어야 한다.
NOTE-
ATIS로 방송되는 경우 ATC는 이것이 dependent로 운영되는지에 대해 특별히 언급하지 않는다.
EXAMPLE-
Simultaneous ILS Runway 19 right and ILS Runway 19 left in use.
e. 특정 공항에서는 2,500ft 미만으로 분리된 활주로들에 simultaneous dependent approaches가 승인된다. 이 경우 ATC는 leader가 항상 동일한 활주로에 도착하도록 minimum authorized diagonal separation 이상을 제공한다. trailing aircraft는 2,500ft 미만으로 분리된 활주로들에 사용되는 single runway separation 대신 reduced diagonal separation이 허가된다. 항적 난기류를 완화하기 위해:
1. 특정 aircraft wake category 쌍들이 존재하는 경우에만 reduced diagonal spacing이 허가된다(일반적으로 leader가 large, 혹은 small wake turbulence category일 경우).
2. 이 운영 도중 모든 항공기는 접근에 대해 승인받은 고도로부터 glideslope을 통해 하강을 수행해야 한다.
reduced separation이 승인된 경우 IAP briefing strip에 다음이 표시된다: simultaneous operations가 vertical guidance를 필요로 함, glideslope을 교차하기 전까지는 마지막으로 할당받은 고도를 유지해야 함. 이 운영을 수행하기 위한 별도의 조종사 교육은 필요하지 않다.
NOTE-
기상 조건과 항적 양에 따라 KSFO의 Runways 28R과 28L(750ft 간격)에서 simultaneous dependent approaches with reduced separation이나 SOIA PRM approaches가 수행될 수 있다. 조종사는 이러한 운영들을 혼동하지 않도록 주의해야 한다. ATC가 PRM approach를 할당한 경우, 혹은 ATIS에서 PRM approaches가 사용 중임을 알리는 경우에만 SOIA procedures를 계획한다. KSFO는 현재 두 절차가 모두 수행되는 유일한 공항이다.
REFERENCE-
AIM, Para 5−4−16, Simultaneous Close Parallel PRM Approaches and Simultaneous Offset Instrument Approaches (SOIA).
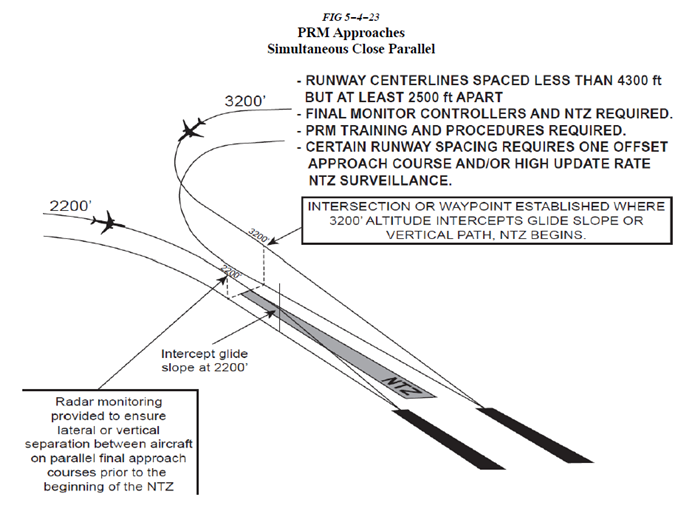
a. System. 중심선이 최소 4,300ft로 분리된 평행 활주로를 향하여 simultaneous approaches를 허용하는 접근 시스템. 중심선이 4,300 ~ 9,000ft(공항 표고가 5,000ft 이상인 경우에는 9,200ft)로 분리된 경우에는 NTZ final monitor controllers가 활용된다. simultaneous independent approaches는 adjacent parallel approach course에 놓인 항공기와의 분리를 보장하기 위해 NTZ radar monitoring을 필요로 한다. 항공기의 위치는 final monitor controllers에 의해 추적된다. final monitor controller는final approach course를 벗어나는 항공기에게 instructions를 발부한다. staggered radar separation procedures는 사용되지 않는다. 전체 시스템은 레이더, 교신, ATC 절차, 그리고 ILS나 기타 필수 공중 장비로 구성된다. chart note를 통해 접근이 simultaneous approaches에 대해 인가되어 있는지 확인할 수 있다.
simultaneous operations가 시행 중이라면 ATIS에서 해당 내용이 방송된다. simultaneous approaches가 시행 중인 것을 확인하였다면 조종사는 작동하지 않는 수신기를 즉시 접근 관제소에 알려야 한다. simultaneous approach를 원하지 않는 경우에도 접근 관제소에 알려야 한다. 조종사는 chart note에서 특별히 승인하는 절차만을 사용해야 한다. 예를 들어 “LNAV NA during simultaneous operations”라는 chart note가 표시되어 있다면vertical guidance가 필요하다. 선택권이 주어진다면 조종사는 가급적 정밀 접근을 비행해야 한다.
NOTE-
simultaneous operations가 ATIS로 방송되고 있다면 ATC는 independent나 parallel이라는 단어를 사용하지 않는다.
EXAMPLE-
Simultaneous ILS Runway 24 left and ILS Runway 24 right approaches in use.
b. Radar Services. 이러한 서비스는 각각의 simultaneous independent approach에 제공된다.
1. parallel final approach로 선회할 때 항공기는 보통 3마일의 레이더 분리나 최소 1,000ft의 수직 분리를 제공받는다. glidepath를 교차하기 전까지는 마지막으로 할당받은 고도를 유지해야 한다(단, ATC로부터 달리 승인받은 경우 제외). final approach course 교차를 위한 vector는 30도를 초과하지 않을 것이다.
NOTE-
일부 simultaneous operations의 경우 항공기가downwind에서 시작되는, 그리고 final approach course를 교차하기 위해 선회하는 RNAV course를 이용할 수 있다. 이 경우 adjacent final approach course에 놓인 항공기와의 분리는 monitor controller에 의해 제공된다.
2. final monitor controller는 tower 주파수에서 tower controller를 override 하는 기능을 가지고 있다.
3. NTZ monitoring이 시작되는 지점에 도달하기 전에 tower 주파수와 교신하도록 지시 받을 것이다.
4. 선회 도중 overshoot이 확인되었거나NTZ를 침범하는 경로로 진행하는 것이 확인되었다면 올바른 final approach course로 즉시 되돌아가도록 지시받을 것이다. final monitor controller는 deviating aircraft의 approach clearance를 취소한 다음 실패 접근이나 그 외의 지시를 발부할 수 있다.
PHRASEOLOGY-
“(Aircraft call sign) YOU HAVE CROSSED THE FINAL APPROACH COURSE. TURN (left/right) IMMEDIATELY AND RETURN TO THE FINAL APPROACH COURSE,”
혹은
“(aircraft call sign) TURN (left/right) AND RETURN TO THE FINAL APPROACH COURSE.”
5. deviating aircraft가 이러한 지시에 응하지 못하였으며 NTZ를 침범하는 것이 확인되었다면 adjacent final approach course에 놓인 항공기에게 breakout instruction이 발부될 것이다.
6. visual separation이 적용되는 경우, 항공기가 접근 등화나 활주로를 확인하였다 보고한 경우, 혹은 항공기가 runway threshold로부터 1NM 이내인 경우에는 radar monitoring이 자동으로 종료된다. final monitor controllers는 radar monitoring이 종료되었음을 조종사에게 알리지 않는다.
NOTE-
9,000ft(공항 표고가 5,000ft 이상인 경우에는 9,200ft) 너머로 분리된 활주로에서 수행되는 simultaneous independent approaches는NTZ를 필요로 하지 않는다. 허나 deviating aircraft와 관련하여 NTZ가 모니터링 될 때와 동일한 경고가 ATC로부터 제공된다.
5-4-16. Simultaneous Close Parallel PRM Approaches and Simultaneous Offset Instrument Approaches(SOIA)
a. System.
1. PRM(Precision Runway Monitor)은 높은 업데이트 속도의 감시 시스템이다. 이는 simultaneous close parallel approaches를 수행하는데 사용되는 특정 parallel runway의 NTZ(No Transgression Zone)을 모니터링 하는데 필요하다.또한 PRM은 Simultaneous Close Parallel approaches를 수행하는데 사용되는 IAP 접근 명칭의 일부로 게재된다. 차트의 “PRM”이라는 단어는 특정 공중 장비, 훈련, 그리고 절차가 적용됨을 조종사에게 알린다.
Simultaneous Close Parallel PRM approaches는 independent이다. 따라서 final approach course들 사이의 NTZ와 NOZ(normal operating zone)는 두 명의 monitor controller(각 approach course마다 한명씩)에 의해 모니터링 된다. NTZ 모니터링 시스템(final monitor aid)은 automated tracking software를 갖춘 고해상도 ATC 레이더 화면으로 구성된다. 이는 항공기 식별부호, 위치, 속도, 예상 위치(10초), 그리고 NTZ 침범에 대한 시각 및 청각 경보를 monitor controllers에게 제공한다. PRM high update rate surveillance sensor는 특정 활주로 간격에서만 final monitor aid의 구성 요소이다. simultaneous independent approaches에 대한 추가적인 절차들은 paragraph 5−4−15, Simultaneous Independent ILS/RNAV/GLS Approaches에 설명되어 있다.
2. Simultaneous Close Parallel PRM approaches는 high update rate PRM surveillance sensor의 유무에 관계없이 다음 조건들을 모두 만족해야 한다: 조종사 훈련, 접근 명칭(PRM), final monitor aid를 활용한 NTZ 모니터링, 레이더 화면, AAUP 간행물, 그리고 secondary PRM communications frequency. PRM approaches는 별도의 IAP에 설명되어 있다((Procedure type) PRM Rwy XXX(Simultaneous Close Parallel or Close Parallel)).
NOTE-
이러한 운영이 ATIS에서 방송되는 경우 ATC는 “independent”라는 단어를 사용하지 않는다.
EXAMPLE-
Simultaneous ILS PRM Runway 33 left and ILS PRM Runway 33 right approaches in use.
(a) 조종사는 현재 사용 중인 것 이외의 PRM approach 유형을 수행하도록 요청할 수 있다(예를 들어 ILS 대신 RNAV). 그러나 다른 유형의 접근을 수행하기 위해선 ATC의 승인을 받아야 한다. 또한 지상의 NAVAIDS가 중단된 경우 ATIS는 이 영향을 받는 활주로(들)에 대해 다른 유형의 PRM approaches를 방송할 수 있다.
(b) AAUP(Attention All Users Page)는 PRM approaches를 수행하기 위한 절차에 대해 설명한다.
b. Requirements and Procedures. 모든 조종사는 PRM approach를 수행하기 위한 clearance를 수락하기 전에 특별 교육을 이수해야 한다.
1. Pilot Training Requirement. 조종사는 simultaneous close parallel PRM approach를 위한 clearance를 받기 전에 아래의 특별 교육을 이수해야 한다.
(a) 14 CFR Parts 121, 129, 그리고 135에 따라 운영하는 경우 조종사는 그들의 운영 기준(Operations Specifications)에서 명시하는 FAA-approved company training을 준수해야 한다. 이 훈련에는 조종사가 FAA training slide presentation, “Precision Runway Monitor(PRM) Pilot Procedures.”를 시청해야 하는 조건을 포함하고 있다. 자세한 정보를 위해 인터넷에 “FAA PRM”을 검색해보라.
(b) Part 91에 따라 운영하는 경우:
(1) transport category aircraft를 운영하는 조종사는 여기에 수록된 PRM operations를 익히 알아야 한다. 또한 transport category aircraft를 운영하는 조종사는 slide presentation, “Precision Runway Monitor (PRM) Pilot Procedures.”를 시청해야 한다. 자세한 정보를 위해 인터넷에 “FAA PRM”을 검색해보라.
(2) transport category aircraft를 운영하지 않는 조종사는 여기에 수록된 PRM operation과 SOIA operation을 익히 알아야 한다. FAA는 transport category aircraft와 관련되지 않은 조종사로 하여금 FAA training slide presentation, “Precision Runway Monitor(PRM) Pilot Procedures.”를 시청하도록 강력히 권장한다. 자세한 정보를 위해 인터넷에 “FAA PRM”을 검색해보라.
NOTE-
기상 조건, 항적의 양, 그리고 입항에 활용되는 활주로들의 특정 조합에 따라 다양한 유형의 simultaneous operations(closely spaced dependent approach나 closely spaced independent approach 포함)가 이용될 수 있다. ATIS가 PRM procedures의 사용을 방송하는 경우 PRM procedures만을 사용한다. 다른 유형의 simultaneous approaches에 대해서는 paragraphs 5-4-14 and 5-4-15를 참조한다.
c. ATC Directed Breakout. NTZ를 침범하는 다른 항공기에 대응하여 위협을 받는 항공기를 final approach course로부터 벗어나도록 vector 하는 것.
d. Dual Communications. PRM approach를 비행하는 항공기의 조종사는 두 개의 교신 주파수를 동시에 청취할 수 있는 기능을 갖추어야 한다. 교신이 차단되는 것을 방지하기 위해 각 활주로는 두 개의 주파수(primary frequency와 PRM monitor frequency)를 가지고 있다. tower controller는 두 주파수에서 모두 전송을 수행한다. 필요한 경우 monitor controller의 교신 전송은 두 주파수를 모두 override 한다. 조종사는 tower controller의 주파수로만 전송을 수행하고 두 주파수를 모두 청취한다. ATC가 지시하는 경우에만 PRM monitor frequency를 선택하여 tower에 교신한다. 두 라디오의 볼륨은 거의 동일하도록 설정되어야 한다. 이는 tower가 차단되었을 때 조종사가 PRM 주파수에서 교신 전송을 들을 수 있도록 해준다. 해당 지역의 특정 절차는 여기에서 다루는 일반적 정보보다 우선된다. 특정 공항에서의 해당 절차에 대해서는 AAUP를 참조한다.
e. Radar Services.
1. parallel final approach로 선회 도중 항공기는 보통 3마일의 레이더 분리, 혹은 최소 1,000ft의 수직 분리를 제공받는다. glidepath를 교차하기 전까지는 마지막으로 할당받은 고도를 유지해야 한다(단 달리 ATC로부터 승인받은 경우 제외). final approach course 교차를 위해 vector를 제공받는 경우 그 각도는 30도를 초과하지 않을 것이다.
NOTE-
일부 simultaneous operations는 downwind에서 시작되어 final approach course를 교차하는 방향으로 진행되는 RNAV course를 track 하도록 허용한다. 이 경우 adjacent final approach course에 놓인 항공기와의 분리는 monitor controller의 NTZ 참조를 통해 제공된다.
2. final monitor controller는 tower 주파수에서 tower controller를 override 하는 기능을 가지고 있다. 또한 final monitor controller는 PRM frequency에서 교신을 전송하는 기능도 가지고 있다.
3. NTZ 모니터링이 시작되는 지점에 도달하기 전에 tower 주파수와 교신하도록 지시 받을 것이다. 이때 조종사는 secondary PRM frequency의 모니터링을 시작한다(아래의 Dual VHF Communications Required 참조).
4. PRM approach 도중 분리를 유지하기 위해, 그리고 긴박한 상황을 방지하기 위해 조종사는 monitor controller의 지시를 바로 준수해야 한다.
5. 선회 도중 overshoot이 확인된 경우, 혹은 NTZ를 침범하는 track으로 진행하는 것이 확인된 경우 올바른 final approach course로 즉시 되돌아가도록 지시받을 것이다. final monitor controller는 deviating aircraft의 approach clearance를 취소한 다음 실패 접근이나 그 외의 지시를 발부할 수 있다.
PHRASEOLOGY-
“(Aircraft call sign) YOU HAVE CROSSED THE FINAL APPROACH COURSE. TURN (left/right) IMMEDIATELY AND RETURN TO THE FINAL APPROACH COURSE,”
혹은
“(aircraft call sign) TURN (left/right) AND RETURN TO THE FINAL APPROACH COURSE.”
6. deviating aircraft가 이러한 지시에 응하지 못하였으며 NTZ를 침범하는 것이 확인된 경우 adjacent final approach course에 놓인 항공기에게 breakout instruction이 발부될 것이다.
7. visual separation이 적용되는 경우, 항공기가 approach lights나 runway를 확인하였다 보고한 경우, 혹은 항공기가 runway threshold로부터 1NM 이내인 경우 레이더 모니터링은 자동으로 종료된다. final monitor controllers는 레이더 모니터링이 종료되었음을 조종사에게 알리지 않는다.
f. Attention All Users Page(AAUP). PRM operation이 수행되는 경우 AAUP의 “General” 섹션은 특정 공항의 모든 PRM approaches와 관련된 정보들을 조종사에게 알려준다. 이 섹션은 전체적으로 브리핑 되어야 한다. “Runway Specific” 섹션의 경우 착륙에 사용될 활주로와 관련된 항목만을 브리핑하면 된다. (그림 5-4-24 참조.) 특정 공항에서의 여러 PRM approach charts에 대해 하나의 AAUP가 사용된다. PRM clearance를 수락할 수 없는 경우 ATC에 알려야 하는 조건 또한 제시되어 있다. AAUP의 “General” 섹션은 다음 사항들을 다룬다:
1. climbing/descending breakout을 수행하기 위한 절차의 검토.
2. “Traffic Alert”라는 단어로 시작되는 breakout phraseology.
3. glideslope/glidepath로 하강하는 것이 모든 crossing restrictions를 충족함.
4. PRM approach 브리핑은 동일한 활주로에 대한 동일한 접근 유형의 non-PRM approach 브리핑도 만족함.
5. dual communications procedure에 대한 설명.
AAUP의 “Runway Specific” 섹션은 PRM approaches를 사용하는 특정 활주로에서 적용되는 사안만을 다루고 있다. Runway Specific procedures가 없거나, 하나의 활주로에 하나의 항목만이 적용되거나, 혹은 하나의 활주로나 다수의 활주로에 여러 항목들이 적용될 수 있다.
g. Simultaneous Offset Instrument Approach(SOIA).
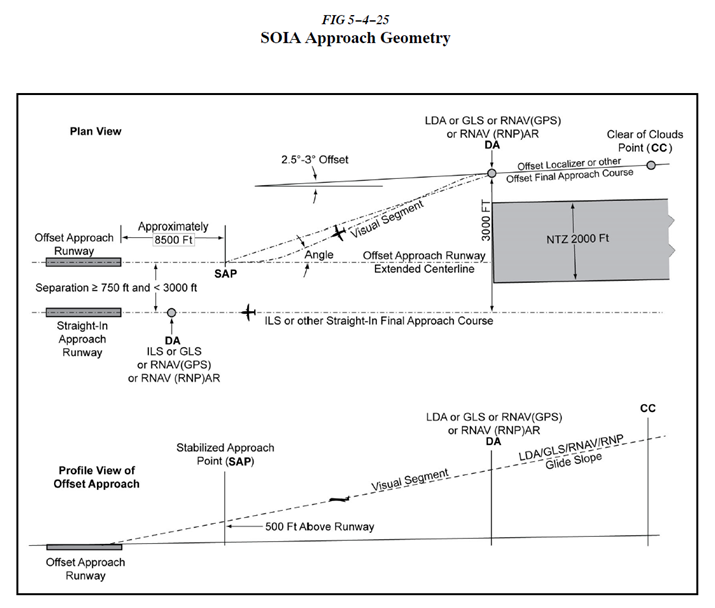
1. SOIA는 750 ~ 3,000ft로 분리된 활주로에 대해 simultaneous approaches를 수행하는데 사용되는 절차이다. SOIA procedure는 하나의 활주로에 대해서는 straight-in PRM approach를, 그리고 adjacent runway에 대해서는 PRM offset approach with glideslope/glidepath를 사용한다. SOIA operation 도중 항공기들을 쌍을 이루는데, 이때 straight-in PRM approach를 수행하는 항공기는 항상 offset PRM approach를 수행하는 항공기보다 약간 전방에 위치한다.
2. SOIA operation에 사용되는 straight-in PRM 차트는 이 외의 straight-in PRM approach 차트와 동일하다(단, simultaneous SOIA approaches에 사용되는 두 활주로 사이의 간격을 제공하는 note가 포함됨). offset PRM approach 차트는 closely spaced approaches에 필요한 정보들을, 그리고 접근의 visual segment를 표시한다.
3. SOIA PRM approaches 모니터링 시 관제사는 이 외의 PRM approaches를 모니터링 할 때와 동일한 방식을 사용한다. SOIA PRM approaches를 위한 절차와 시스템 요구사항은 simultaneous close parallel PRM approaches에서 사용되는 것과 동일하다(단, offset PRM approach missed approach point에 근접하기 전까지. 이 지점에서 offset PRM approach를 수행하는 항공기는 straight-in aircraft를 육안 확인한다.) SOIA PRM approaches는 이 외의 PRM approaches와 동일하다(단, offset approach의 visual segment 제외). 따라서 SOIA PRM operation을 수행하기 전에 PRM approaches 수행 절차를 이해하는 것이 필수적이다.
4. SOIA에서는 runway separation 대신 approach course separation이 close parallel approach criteria를 충족한다. (일반적인 SOIA approach geometry를 위해 그림 5-4-25를 참조.) offset PRM approach의 visual segment는 offset MAP와 runway threshold 사이에 설정된다. offset MAP에서 항공기를 활주로에 정렬하기 위해 visual conditions로 전환한다. 항공기는 500ft AGL에서 활주로 중심선에 연장될 수 있다. offset approach를 수행하는 항공기가 offset MAP에 도달하기 최소 30초 전에 leading straight-in aircraft를 확인할 수 있도록 cloud ceiling이 설정된다. 만약 offset MAP를 통과하기 전에 육안 확인이 이루어지지 못했다면 실패 접근을 수행해야 한다.
NOTE-
SAP – stabilized approach point는 glide slope/glide path가 runway threshold elevation으로부터 500ft 지점인 착륙 활주로 연장선상의 특정 지점이다.
Offset Course DA – adjacent ILS(혹은 그 외 straight-in course)와 LDA(혹은 그 외 offset course)와의 경로 간격이 closely spaced approaches를 수행하는데 허용되는 최소 거리에 도달하는 지점. high update radar를 사용하지 않는 경우 이 최소 거리는 일반적으로 3,000ft이다. high update radar를 사용하며 안전성 연구에 의해 인가된 경우 3,000ft 미만의 경로 간격을 사용할 수 있다. 해당 지점에서의 glide slope/glide path 고도는 offset course approach decision altitude를 결정하며 이 지점에서 NTZ가 종료된다. DA 이후에서의 기동은 visual conditions로 수행된다.
Visual Segment Angle – SOIA design tool에 의해 결정된 이 각도는 비행경로(offset course MAP/DA와 SAP 사이의 경로)의 연장선과 활주로의 연장선에 의해 형성된다. 이 각도의 크기는 offset course를 사용하도록 인가된 approach category(Category D, 혹은 특정 categories/speeds)에 따라, 그리고 활주로들 사이의 간격에 따라 달라진다.
Procedure – offset course approach에 놓인 항공기는 runway-landing environment를 반드시 확인해야 한다. 만약 ATC가 straight-in approach에 놓인 항적을 조언한 경우 offset course approach aircraft는 offset course approach의 DA에 도달하기 전에 straight-in approach aircraft를 반드시 확인해야 하며 이를 ATC에 보고해야 한다.
CC- Clear of Clouds는 offset final approach course상의 위치이다. 실제 기상 조건이 SOIA operations를 위한 minimum ceiling 근처인 경우 이 지점에서 항공기가 최초로 VMC에서 운영된다.
5. SOIA operation에서 offset RNAV PRM approach와 offset GLS PRM approach에 대한 FMS(Flight Management System) coding은 IAP에 게재된 initial missed approach procedure와 일치하지 않는다. 이는 이 외의 RNAV approach와 GLS approach에 대한 FMS coding과는 다르다. offset approach에 대한 SOIA design에서 lateral course guidance는 FTP(fictitious threshold point)에서 종료된다. 이는 offset MAP 너머로 연장된 final approach course가 runway threshold 근처와 교차하는 지점이다. FTP는 approach coding에서 MAP로 지정된다. 따라서 조종사는 runway threshold까지 vertical guidance를 이용할 수 있다(마치 offset LDA glideslope에 의해 vertical guidance가 제공되는 것처럼). 어떤 유형의 offset approach를 수행하던 차트의 MAP 지점에서 lateral guidance를 종료한 다음 활주로 정렬을 위해 visual maneuvering을 수행한다.
(a) 따라서 offset MAP를 통과한 후에 실패 접근을 수행한다면 LNAV를 설정하기 전에 먼저 heading을 비행해야 한다(autopilot의 “heading mode”를 통해, 혹은 조종사의 수동 조작을 통해). 만약 조종사가 즉시 LNAV를 설정한다면 항공기가 missed approach holding fix를 향해 선회를 시작하는 대신 FTP를 계속 track 할 수 있다. IAP와 AAUP의 notes가 이러한 절차를 구체적으로 표시한다.
(b) 일부 FMS는 FAF 내부의 waypoints를 접근의 일부로 코딩하지 않는다. 따라서 IAP에 표시된 MAP가 offset approach coding에 포함되지 않을 수도 있다. 이러한 FMS를 사용하는 조종사는 IAP에 게재된 FTP로부터의 거리를 통해 waypoint 위치를 식별할 수 있다. 이러한 FMS는 straight-in SOIA approach에서 PFAF 내부의 waypoint를 표시하지 않을 것이다. 코딩되지 않은 waypoint를 식별하기 위해 동일한 절차가 사용될 수 있다. 이 경우 runway waypoint로부터의 거리를 통해, 혹은 차트에 게재된 거리를 통해 그 위치를 결정한다.
(c) FTP가 MAP로 코딩되므로 FMS map display는 FTP에서 시작되는 initial missed approach course를 표시한다. 이는 IAP의 initial missed approach procedure와 일치하지 않는다. 조종사는 map display가 아닌 차트의 IAP 안내를 따라야 한다. 실패 접근 시 항공기가 초기 선회를 완료하였다면 나머지 procedure coding은 IAP와 동일하므로 사용될 수 있다.
6. SOIA PRM approach는 이 외의 PRM approaches와 동일한 dual communications procedures를 사용한다.
NOTE-
KSFO의 경우 SOIA operations를 수행하는 조종사는 final radar controller와의 교신 시 monitor frequency audio를 선택한다. 필요한 경우 monitor controller의 교신 전송은 final controller의 주파수를 override 한다. 이 절차는 AAUP에서 다루어진다.
(a) SOIA는 이 외의 PRM approaches와 동일한 AAUP 형식을 사용한다. 필요한 minimum weather conditions가 여기에 나열된다. SOIA approaches를 수행하기 위한 지침이 더 복잡한 이유로 “Runway Specific” 항목들이 더 많고 길다.
(b) SOIA offset runway specific notes의 예시:
(1) 항공기가 offset MAP를 통과하기 전까지는 offset course를 유지해야 한다.
(2) 다음 경우 조종사는 runway centerline과 정렬되기 위해 offset MAP 너머를 계속 진행할 수 있다:
[a] straight-in approach 항적을 확인하였으며 계속 육안으로 확인된다.
[b] ATC에게 “traffic is in sight”를 알렸다(이러한 교신에 ATC는 acknowledge를 수행하지 않아도 된다).
[c] runway environment를 확인하였다. 그렇지 않다면 실패 접근을 수행해야 한다. offset MAP와 runway threshold 사이에서 offset PRM approach를 수행하는 조종사는 straight-in aircraft를 추월해서는 안 된다. 그리고 조종사는 adjacent runway에서 straight-in PRM approach를 수행하는 항적을 육안으로 분리할 책임이 있다. 즉, 착륙하기 전까지는 필요에 따라 해당 항적을 회피하기 위해 항공기를 기동함을, 그리고 해당하는 경우 항적 난기류 회피를 제공함을 의미한다. straight-in PRM approach를 수행하는 항공기와의 visual contact가 상실된 경우 visual separation을 유지하는 조종사는 최대한 빨리 ATC에 이를 알려야 한다. 그리고 ATC로부터 달리 지시받지 않는 한 실패 접근을 수행해야 한다.
(c) SOIA straight-in runway specific notes의 예시:
(1) offset aircraft의 항적 난기류 완화를 돕기 위해 조종사는 glidslope/glidepath를 따라 비행해야 한다.
(2) straight-in approach 수행하는 조종사는 좌측/우측 후방에서 offset approach를 수행하는 항공기가 접근하고 있음을, 그리고 straight-in aircraft와 근접하여 운영되고 있음을 인지해야 한다.
7. Recap.
다음은 widely spaced simultaneous approaches(활주로 중심선들 사이의 간격이 최소 4,300ft)와 Simultaneous PRM close parallel approaches의 차이점이다:
(a) Runway Spacing. PRM simultaneous close parallel approaches 이전에 지시되는 대부분의 ATC breakouts는 동일한 final approach course에 놓인 일렬의 두 항공기가 서로 가까워진 결과 발생한다. 두 항공기가 동일한 방향으로 이동하는 경우에는 빠른 반응이 필요하지 않다. PRM closely spaced approaches 도중 두 항공기는 4,300ft 미만으로 떨어져 있는 경로들을 항행하면서 서로 나란히 있을 수 있다. 항공기가 본인의 경로로부터 “blunders” off 하여 adjacent approach course를 향해 30도로 선회한 경우 초속 135ft의 근접 속도가 발생할 수 있다. 이는 빠른 반응을 필요로 한다. monitor controller는 blunder를 인지해야 하며 위험에 처한 항공기에게 breakout instructions를 발부해야 한다. blundering aircraft는 다른 주파수에 있으므로 조종사는 breakout이 곧 수행될 것임을 경고 받지 못한다. breakout instructions를 받은 경우 조종사는 blundering aircraft가 NTZ를 침범하고 있음을, 그리고 본인의 approach course로 향하고 있음을 추정해야 한다. 조종사는 안전이 허용하는 즉시 breakout을 시작해야 한다. PRM approaches 수행 도중 ATC의 (breakout) instruction에 즉시 반응하여 blundering aircraft로부터 멀어지도록 기동하기 위해선 경각심을 증가시켜야 한다.
(b) Communications. dual VHF communications procedures를 준수해야 한다. PRM approaches의 안전한 수행을 허용하는 가정들 중 하나는 교신이 차단되지 않는다는 것이다.
(c) Hand-flown Breakouts. PRM approach 비행 시 autopilot을 사용하는 것이 권장된다. 허나 breakout이 발부된 경우에는 반드시 autopilot을 해제해야 한다. 시뮬레이션 연구 결과 hand-flown breakout이 autopilot breakout보다 더 빠르게 시작될 수 있다.
(d) TCAS. ATC breakout instruction은 conflict resolution을 위한 주요 수단이다. TCAS는 이 외의 separation standards가 위배되었을 시 다른 형태의 conflict resolution을 제공한다. closely spaced approach를 수행하기 위해 TCAS가 필요하지는 않다.
TCAS는 항적 회피를 위해 수직 지침만을 제공한다. 반면 ATC breakout instruction은 수직 지침과 수평 지침을 제공한다. TCAS RA(Resolution Advisory)를 수신한 조종사는 즉시 이를 따라야 한다. ATC breakout instruction을 발부받기 전에, 발부받던 도중, 혹은 발부받은 후에 TCAS RA를 수신하였다면 조종사는 RA를 따라야 한다(설령 이것이 breakout maneuver의 상승/하강 지시와 다르다 하여도). 만약 RA를 따르는 것이 ATC clearance를 벗어난다면 조종사는 최대한 빨리 이를 ATC에 알려야 한다. RA를 수행하는 동안 ATC breakout의 선회 지시를 준수하는 것 또한 매우 중요하다. 이러한 절차를 준수할 경우 절차상의 문제나 시스템 문제에도 불구하고 적절한 “breakout” separation이 제공된다.