Approaches
Compliance With Published Standard Instrument Approach Procedures
접근 차트에 표시된 접근 절차들을 준수하면 final approach courses와의 정렬에 필요한 항법 안내 정보 뿐만 아니라 장애물 회피도 제공된다. 특정 상황에서는 course reversal maneuver나 procedure turn이 필요할 수 있다. 그러나 이러한 절차는 다음과 같은 경우에는 승인되지 않는다:
1. 접근 차트의 plan view에 그려진 접근 경로에 “NoPT” 기호가 표시된 경우.
2. final approach course를 향해 radar vector가 제공되는 경우.
3. procedure turn 대신에 holding pattern이 게재된 경우.
4. holding fix로부터 timed approach를 수행하는 경우.
5. 달리 ATC가 지시하는 경우.
Instrument Approaches to Civil Airports
공항 착륙을 위해 계기 접근이 필요한 경우 조종사는 해당 공항에 대해 규정된 standard IAP를 사용해야 한다. IAP는 IAP charts에 표시되며 TPP에서 찾을 수 있다.
접근 절차들은 공항에서 이용 가능한 시설, 수행하는 계기 접근의 유형, 그리고 기상 조건에 따라 달라진다. ATC 시설, NAVAID, 그리고 각 계기 접근과 관련된 주파수가 접근 차트에 제공된다. 각각의 차트들은 다음과 같은 유형의 시설과 관련하여 게재된다:
1. Nondirectional beacon(NDB)
2. Very-high frequency omnirange(VOR)
3. Very-high frequency omnirange with distance measuring equipment(VORTAC or VOR/DME)
4. Localizer(LOC)
5. Instrument landing system(ILS)
6. Localizer-type directional aid(LDA)
7. Simplified directional facility(SDF)
8. Area navigation(RNAV)
9. Global positioning system(GPS)
IAP는 두 가지 방법 중 하나로 수행될 수 있다: full approach, 혹은 radar vectors 지원을 포함한 approach. IAP가 full approach로 수행될 경우 조종사는 계기 접근 차트에 표시된 경로 및 고도를 사용하여 자체 항법을 수행한다. full approach를 통해 조종사는 최소한의 ATC 지원과 함께 항로 구간에서 계기 접근으로, 그리고 계기 접근에서 착륙으로 진행한다. 이러한 유형의 절차를 조종사가 요청할 수 있으며 보통 레이더가 없는 지역에서 사용된다. 또한 full approach는 교신 두절 시 조종사에게 계기 접근을 완료할 수 있는 수단을 제공한다.
radar vectors 지원을 포함한 접근이 수행될 경우 ATC는 heading과 altitude를 통해 항공기가 final approach를 교차할 수 있는 위치로 유도한다. 이때부터 조종사가 자체 항법을 재개하고, final approach course를 교차하고, IAP 차트를 사용하여 접근을 완료한다. 이는 접근을 수행해는데 있어 full approach보다 더 편리하며 ATC로 하여금 입항 항적의 순서를 정할 수 있게 해준다. radar contact 상태인 조종사는 final approach course로 향하는 radar vector를 요청할 수 있다.
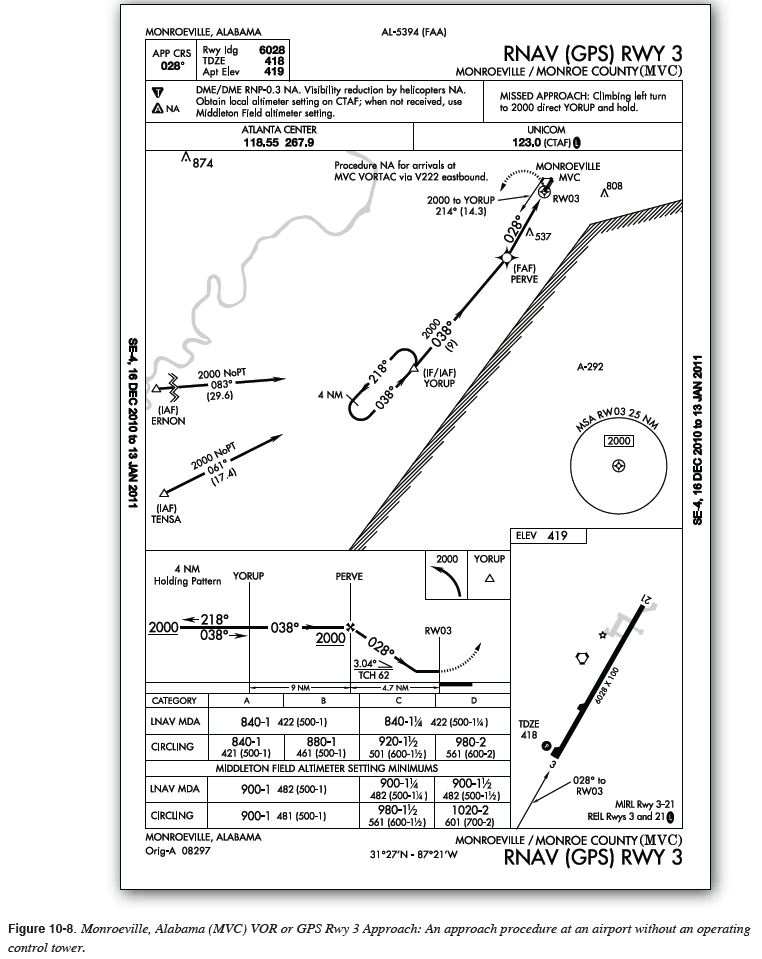
Approach to Airport Without an Operating Control Tower
그림 10-8은 운영 중인 관제탑이 없는 공항에서의 접근 절차를 보여준다. 이러한 곳에 접근할 때 만약 AWOS/ASOS를 사용할 수 있다면 조종사는 최신 기상 정보를 위해 이를 확인해야 한다. 조종사와 관제사간의 교신이 더 이상 필요하지 않으면 ARTCC나 approach 관제사는 계기 접근을 위한 clearance를 발부하고 “change to advisory frequency approved”라 통보한다. 항공기가 “cruise” clearance로 입항 중이라면 ATC는 착륙 및 접근을 위한 차후의 clearance를 발부하지 않는다.
approach clearance가 필요한 경우에는 ATC가 “Cleared for the approach”라는 문구와 함께 조종사로 하여금 본인이 원하는 계기 접근을 수행하도록 인가하며 교신 주파수의 변경이 필요하다면 이를 인가한다. 이 시점부터는 ATC와의 교신이 없다. 만약 VFR conditions라면 착륙 전에 IFR 비행 계획서를 취소하는 것이 조종사의 의무이다(혹은 착륙 후에 전화로 IFR 비행 계획서를 취소한다).
ATC가 달리 승인하지 않는 한 조종사는 차트의 IAP를 완전히 수행해야 한다.
Approach to Airport With an Operating Tower, With No Approach Control
운영 중인 관제탑은 있으나 approach control이 없는 공항에 접근하는 경우에는 ATC가 다음과 같은 적절한 정보와 지시를 통해 approach/outer fix로 향하는 clearance를 발부한다.
1. fix의 명칭
2. 유지해야할 고도
3. 체공 정보와 expected approach clearance time
4. 차후의 교신과 연관된 지시. 여기에는 다음을 포함한다:
a) 교신할 시설
b) 교신 시기 및 위치
c) 사용해야할 주파수
ATIS를 이용할 수 있다면 조종사는 관제사와의 최초 교신 전에 ATIS 주파수를 확인하여 다양한 정보들(예를 들어 ceiling, 시정, 풍향 및 풍속, 고도계 세팅, 계기 접근, 그리고 활주로)을 얻어야 한다. 만약 ATIS가 없다면 ATC가 가장 가까운 기상 보고소로부터 기상 정보를 제공한다.
Approach to an Airport With an Operating Tower, With an Approach Control
접근 관제를 위해 레이더가 승인되어 있다면 IAP와 함께 vector를 제공하기 위해 레이더가 사용된다. radar vector는 경로 안내를 제공할 뿐만 아니라 항적들을 final approach course로 신속하게 처리할 수 있다. 그림 10-9는 관제탑과 접근 관제소가 운영 중인 공항의 IAP를 나타낸다.

이러한 레이더 서비스를 제공하는 접근 관제 시설은 다음과 같은 방식으로 운영된다:
1. 입항 항공기는 수직 분리와 함께 비행경로에 가장 적절한 outer fix로 승인되고 필요하다면 체공 정보가 주어진다.
2. 만약 ARTCC와 approach control 간에, 혹은 서로 다른 approach control 시설 간에 관제 이양이 이루어진다면 입항 항공기가 공항이나 특정 fix로 승인된다.
a) 연이은 입항 항공기들은 수직 분리 대신 레이더 분리를 통해 approach control로 이양될 수 있다.
b) approach control로 이양된 후 항공기는 적절한 final approach course로 vector 된다.
3. 항공기 간격 및 분리에 필요한 대로 radar vectors와 altitude/flight levels가 발부된다. 접근 관제소에서 발부한 heading으로부터 벗어나지 않는다.
4. 간격이나 그 외 이유로 인해 final approach course를 가로지르는 vector를 제공해야 한다면 ATC는 이를 항공기에 알려야 한다. approach course를 곧 교차함에도 불구하고 항공기가 final approach course를 가로질러 vector 될 것이라는 ATC 통보를 받지 못하였다면 조종사는 관제사에게 의문을 제기해야 한다. approach clearance가 발부되기 전까지는 final approach course를 향해 선회해서는 안 된다. 이러한 clearance는 final approach course를 교차하기 위한 final vector와 함께 발부된다. 이러한 vector는 항공기가 final approach fix에 도달하기 전에 final approach course에 설정되도록 해준다.
5. 항공기가 final approach course에 설정되었다면 다른 항적과의 레이더 분리가 유지된다. 조종사는 clearance에서 지정된 NAVAID(ILS, VOR, NDB, GPS, 등등)를 주요 항법 수단으로 사용해서 접근을 완료해야 한다.
6. final approach fix를 통과한 후 조종사는 접근을 완료하거나 실패 접근 절차를 수행해야 한다.
7. 착륙이 완료되거나 advisory frequency로 변경하라는 지시를 받으면(비관제 공항에서) 레이더 서비스가 자동으로 종료된다.
Radar Approaches
radar approach를 수행할 경우 조종사는 관제사로부터 경로 안내와 고도 안내를 받는다. 이는 조종사가 비상 상황이거나 조난 상황일 때 선택할 수 있는 방법이다.
radar approach에 필요한 유일한 공중 장비는 라디오 송수신기이다.
레이더 관제사는 항공기가 활주로 중심선에 연장되도록 vector를 제공한다. 관제사는 조종사가 지표면의 시각 참조물을 통해 접근 및 착륙을 완료할 때까지 vector를 제공한다. radar approach에는 두 가지 유형이 있다: PAR(precision)과 ASR(Surveillance).
모든 조종사들은 radar approach를 요청할 수 있으며 항적을 신속히 처리하기 위해 radar approach가 제공될 수도 있다. 허나 ASR은 비정상 상황이거나 비상 상황이 아니면, 혹은 ATC 운영 요건이 있지 않으면 승인되지 않을 수 있다. 조종사는 PAR이나 ASR을 승인한다 하더라도 공항의 기상 최저치는 준수해야 한다. 보고된 기상이 최저치 이하라면 radar approach를 수행할지 결정하는 것은 조종사에게 달려있다.
PAR과 ASR의 최저치는 FAA TPP에 게재된다. 그림 [10-10]

PAR은 관제사가 조종사에게 고도와 방위에 대해 매우 정확한 항법 안내를 제공하는 접근이다.
관제사는 항공기가 착륙 활주로의 중심선에 정렬되도록 heading을 제공한다. 조종사는 glidepath가 교차되기 대략 10 ~ 30초 전에 이를 예상하라는 지시를 받는다. 접근에 대해 게재된 DH(decision height)는 오직 조종사가 요청하는 경우에만 제공된다. 항공기가 glidepath로부터 위/아래로 벗어나는 것이 확인되면 관제사는 “slightly”나 “well”이라는 용어를 통해 그 정도를 알려주며 조종사는 항공기의 하강률/상승률을 조정하여 glidepath로 되돌아가야 한다. 항공기 고도와 관련하여 trend information 또한 발부되며 이는 “rapidly”와 “slowly”라는 용어를 통해 수식될 수 있다(예를 들어, “well above glidepath, coming down rapidly”)
touchdown으로부터의 거리는 최소 1마일마다 한 번씩 주어진다. 항공기가 방위각 및/혹은 고도에 대하여 지정된 안전 구역을 벗어날 경우 관제사는 실패 접근이나 특정 경로를 비행하라 지시한다(단, 조종사가 runway environment를 확인한 경우 제외). 항공기가 DH에 도달하기 전까지는 방위각과 고도에 대한 항법 안내가 조종사에게 제공된다. 항공기가 landing threshold를 통과하기 전까지는 관제사로부터 advisory course and glidepath 정보가 제공된다. 이때 조종사는 활주로 중심선으로부터 조금만 벗어나도 이를 통보받는다. 접근이 완료되면 레이더 서비스가 자동으로 종료된다.
ASR은 관제사가 방위각 안내만을 제공하는 접근이다.
관제사는 항공기가 착륙 활주로의 중심선에 정렬되도록 heading을 제공한다. surveillance approach에 사용되는 레이더 정보는 precision approach에 사용되는 레이더 정보보다 상당히 덜 정밀하기 때문에 접근의 정확도가 높지 않으므로 더 높은 기상 최저치가 적용된다. 비록 고도 정보는 제공되지 않지만 MDA(혹은 해당하는 경우에는 step-down fix MCA와 그 이후의 MDA)로 하강을 시작할 시기는 제공된다. 또한 조종사는 MAP(Missed Approach Point)의 위치, 그리고 활주로(혹은 공항, 헬기장, MAP)로부터 1마일 단위의 항공기 위치를 제공받는다.
조종사가 요청할 경우 매 1마일마다 recommended altitudes가 발부된다. 이는 절차에 대해 설정된 descend gradient를 기초로 하며 MDA로부터 마지막 1마일까지 발부된다. 보통 항공기가 MAP에 도달하기 전까지 항법 안내가 제공된다.
radar approach가 완료되면 레이더 서비스가 자동으로 종료된다.
레이더 관제 하에서 directional gyro나 그 외 stabilized compass의 고장을 경험하는 조종사는 no-gyro approach를 이용할 수 있다. 이러한 상황이 발생하였다면 조종사는 해당 사실을 ATC에 알린 다음 no-gyro vector나 no-gyro approach를 요청해야 한다. directional gyro나 그 외 stabilized compass를 장비하지 않은 항공기의 조종사가 레이더 관제를 원하는 경우에도 no-gyro vector나 no-gyro approach를 요청할 수 있다. 조종사는 모든 선회를 표준율 선회로 수행해야 하며 지시를 받는 즉시 선회를 수행해야 한다. (예를 들어 “TURN RIGHT.” “STOP TURN.”) surveillance approach나 precision approach를 수행하는 경우에는 final approach를 향하여 선회를 한 후에 모든 선회를 반표준율 선회로 수행하도록 지시받는다.
Radar Monitoring of Instrument Approaches
PAR 시설은 계기 접근 중인 항공기를 모니터링 하며 기상이 VFR minimums(1,000 and 3) 미만일 때, 야간일 때, 혹은 조종사가 요청하였을 때 레이더 조언을 발부한다. 이러한 서비스는 PAR Final Approach Course가 항법보조시설의 final approach와 일치하는 경우, 그리고 PAR이 현재 운영 중인 경우에만 제공된다. 접근을 위한 주요 수단으로 NAVAID를 선택하였기 때문에 레이더 조언은 오직 보조 수단으로 사용된다.
ATC는 조종사가 final approach를 시작하기 전에 레이더 조언이 송신될 주파수를 알려준다. 어떤 이유로든 레이더 조언을 제공할 수 없다면 이를 알린다.
레이더를 통해 얻은 조언 정보로는 다음이 포함된다:
1. final approach fix(비정밀 접근) 통과 정보, 혹은 outer marker나 outer marker를 대신하여 사용되는 fix(정밀 접근) 통과 정보.
2. 고도 및/혹은 방위각 위치와 움직임 대한 추세 정보.
3. 반복되는 조언에도 불구하고 항공기가 PAR 안전 구역을 벗어나거나 과한 편차가 발생하였다면 조종사에게 실패 접근을 수행하라 알린다(단, 조종사가 지상의 시각 참조점을 확인한 경우 제외).
접근 종료 시 레이더 서비스가 자동으로 종료된다. [그림 10-11]

Timed Approaches From a Holding Fix
많은 수의 항공기가 approach clearance를 기다리고 있다면 holding fix에서 timed approach가 수행된다. 관제사는 특별히 “timed approaches are is progress”라 명시하지는 않는다. 대신 FAF(비정밀 접근), 혹은 outer marker나 outer marker를 대신하여 사용되는 fix(정밀 접근)를 떠나는 시간이 할당된다는 것은 timed approach 절차가 사용되고 있음을 의미한다.
다음과 같은 조건이 충족되면 timed approach를 수행할 수 있다:
1. 접근을 수행하는 공항의 관제탑이 운영 중이다.
2. 관제탑과 교신하라는 지시가 내려지기 전까지는 center나 approach와 교신을 유지한다.
3. 두 개 이상의 MAP를 사용할 수 있다면 모두 course reversal을 필요로 하지 않아야 한다.
4. 하나의 MAP만 사용할 수 있다면 다음 조건들이 충족되어야 한다:
a) course reversal을 필요로 하지 않아야 함.
b) 보고된 ceiling과 visibility가 가장 높은 circling minimums 이상이어야 함.
5. 접근 허가를 받았을 때 조종사는 procedure turn을 수행해서는 안 된다.
Approaches to Parallel Runways
parallel approach 절차를 통해 두 개나 세 개로 이루어진 평행 활주로를 향하여 ILS 접근을 수행할 수 있다. parallel approach는 활주로 중심선간의 간격이 최소 2,500ft 이격된 평행 활주로가 있는 공항을 향하여 parallel ILS approach를 수행할 수 있도록 하는 ATC 절차이다. parallel approach가 진행 중이라면 조종사는 양쪽 활주로에 대한 접근이 진행 중임을 보고받는다.
다음 조건이 만족되면 simultaneous approach가 허가된다:
1. 활주로 중심선이 4,300 ~ 9,000ft 이격된 경우
2. final monitor controllers를 갖춘 경우
3. 레이더 모니터링이 이루어지는 경우. 이는 서로 인접한 평행 접근 경로들로부터 항공기간 분리를 보장하기 위함.
적절한 활주로를 식별하기 위하여 접근 차트에 “simultaneous approaches authorized RWYS 14L and 14R”이라는 note가 표시된다. simultaneous parallel approach가 진행 중이라는 조언을 받았다면 조종사는 접근 관제사에게 즉시 오작동 장비를 알려야 한다.
parallel approach를 수행하기 위해선 상황 인식이 강화되어야 한다. simultaneous parallel approach를 수행하는 항공기들은 서로 가까이 있으므로 조종사는 ATC clearances와 접근 절차를 확실히 준수해야 한다. 조종사는 접근 차트의 다음 정보들에 특히 주의해야 한다: 접근의 명칭 및 번호, localizer 주파수, inbound course, glideslope intercept altitude, DA/DH, missed approach instructions, special notes/procedures, 할당받은 활주로, 그리고 인접 활주로와의 근접도. 또한 조종사는 교신을 지속적으로 모니터링 해야 하며 불필요하게 긴 무선 송신을 피해야 한다.
Side-Step Maneuver
ATC는 1,200ft 이하로 이격된 두 개의 parallel runways 중 하나에 side-step maneuver를 인가한 후 인접 활주로에 straight-in landing을 허가할 수 있다. side-step maneuver를 수행하는 항공기는 ATC가 명시한 비정밀 접근을 수행하도록, 그리고 인접한 평행 활주로에 착륙하도록 인가된다. (예를 들어, “Cleared ILS runway 7 left approach, side-step to runway 7 right.”) 조종사는 활주로나 runway environment를 육안으로 확인하였다면 최대한 빨리 side-step maneuver를 수행해야 한다. 인접 활주로로 향하는 landing minimums는 비정밀 접근 기준을 기초로 한다. 따라서 해당 landing minimums는 주 활주로의 precision minimums보다 높지만 보통 circling minimums보다는 낮다.
Circling Approaches
공항 상공을 선회해야 하거나, 착륙을 위해 기동을 해야 하거나, 혹은 접근 차트에 straight-in minimums가 지정되지 않은 경우에는 접근 차트의 “CIRCLING”에서 명시하는 landing minimums가 적용된다. [그림 10-11]
계기 접근 차트에 게재된 circling minimums는 circling area 내에서 최소 300ft의 장애물 회피를 제공한다. [그림 10-12] circling approach 도중 조종사는 활주로를 계속 육안으로 확인해야 하며 착륙을 위한 최종 강하 지점에 도달하기 전까지는 circling minimums 이하로 비행해서는 안 된다. circling minimums는 단지 minimums에 불과하다는 것을 기억하는 것이 중요하다. 기상(ceiling)이 괜찮다면 VFR 장주 고도에 더 가까운 고도로 비행한다. 이는 모든 기동을 더욱 안전하게 만들며 착륙 활주로를 바라보는 모습을 더욱 보편적이게 만들어준다.

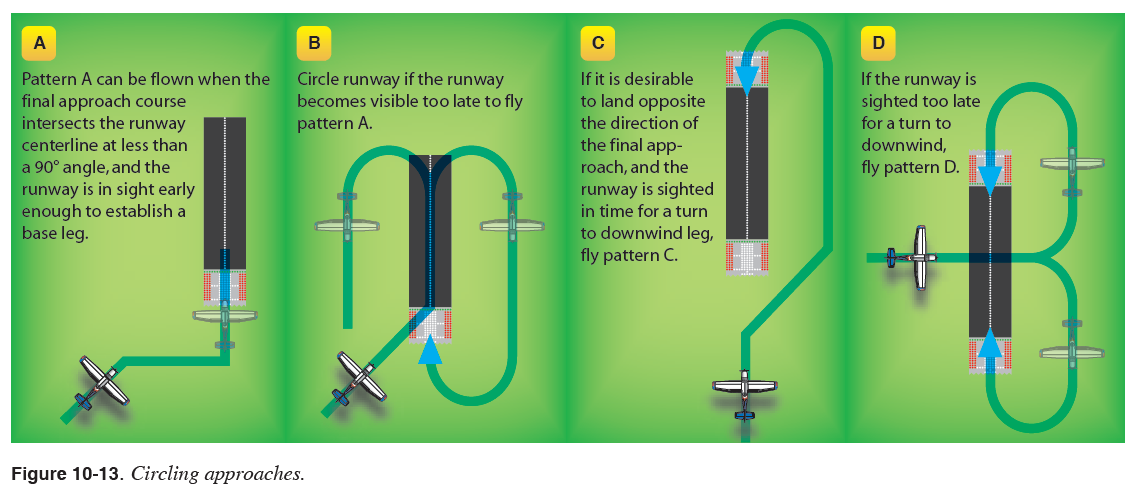
그림 10-13은 circling approach에서 사용할 수 있는 패턴을 보여준다. A 패턴은 final approach course가 활주로 중심선을 90도 미만으로 교차하는 경우, 그리고 base leg를 설정할 수 있을 만큼 일찍 활주로를 발견한 경우에 비행될 수 있다. 활주로를 너무 늦게 확인하여 A 패턴을 비행할 수 없다면 B처럼 비행한다. final approach 방향의 반대쪽으로 착륙하는 것이 바람직한 경우, 이와 동시에 downwind leg를 향해 선회를 할 수 있을 만큼 충분히 일찍 활주로를 발견한 경우에는 C 패턴을 비행한다. downwind leg를 향하여 선회를 하기엔 활주로를 너무 늦게 확인하였다면 D 패턴을 비행한다. 패턴에 상관없이 조종사는 circling area 내에 머물도록 항공기를 기동해야 한다. circling approach category에 대한 설명은 각 TPP의 section A(“Terms and Landing Minima Data”)를 참조한다. 패턴을 결정하는 기준은 개인 비행 기량과 항공기 성능 특성에 달려있다. 패턴 비행 시 조종사는 다음 요소들을 고려해야 한다: 공항 디자인, ceiling과 visibility, 풍향과 풍속, final approach course와의 정렬, final approach fix에서 활주로까지의 거리, 그리고 ATC instructions.
IAP Minimums
기상상태가 해당 계기접근절차의 착륙기상최저치 미만인 경우에는 결심고도(DH) 또는 최저강하고도(MDA)보다 낮은 고도로 착륙을 위한 접근을 시도하지 아니할 것. 다만, 다음 각 목의 요건에 모두 적합한 경우에는 그러하지 아니하다.
1. 정상적인 강하율에 따라 정상적인 방법으로 그 활주로에 착륙하기 위한 강하를 할 수 있는 위치에 있을 것.
2. 비행시정이 해당 계기접근절차에 규정된 시정 이상일 것.
3. 활주로에 대한 다음의 시각 참조점들 중 적어도 하나를 조종사가 보고 식별할 것:
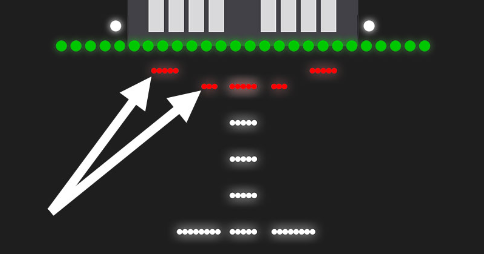
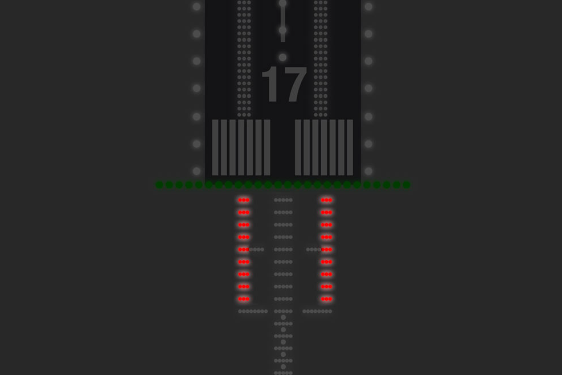
a) Approach light system: 조종사가 진입등의 구성품 중 붉은색 측면등(red side row bars) 또는 붉은색 최종진입등(red terminating bars)을 명확하게 보고 식별할 수 없는 경우에는 활주로의 접지구역표면으로부터 30미터(100피트) 높이의 고도 미만으로 강하할 수 없다.
b) Threshold
c) Threshold markings
d) Threshold lights
e) REIL(Runway end identifier lights)
f) VASI(Visual approach slope indicator) or PAPI(Precision Approach Path Indicator)
g) Touchdown zone or touchdown zone markings
h) Touchdown zone lights
i) Runway or runway markings
j) Runway lights
※ 이와 관련된 내용은 항공안전법 시행규칙에서 확인할 수 있다(링크: https://www.law.go.kr/법령/항공안전법시행규칙/(20240531,01341,20240531)/제181조).
※ 각 시각 참조점들을 그림으로 보고싶다면? (https://www.boldmethod.com/blog/lists/2024/03/the-ten-things-you-need-to-see-to-land-on-an-instrument-approach/) 참조.
Missed Approaches
MAP는 각 계기 접근에 대해 설정되며 이는 조종사가 장애물 회피를 유지하면서 다시 항로로 되돌아갈 수 있게 해준다. 실패접근 절차는 차트에 텍스트 및 그림으로 표시된다. 실패접근은 조종실 업무가 가장 많을 때 수행되므로 접근을 수행하기 전에 실패접근 절차를 연구 및 숙지해야 한다.
MAP 수행 시 상승 출력과 상승 자세를 설정해야 한다. 상승을 위해 항공기 외장을 설정하고, 적절한 heading으로 선회하고, 실패 접근이 수행되었음을 ATC에 알리고, 차후의 clearance를 요청한다.
MAP에 도달하기 전에 실패 접근이 시작되었다면 접근 차트에 명시된 대로 IAP를 계속 비행한다(단, ATC가 달리 승인한 경우 제외). 선회를 시작하기 전에 MDA나 DA/DH 이상으로 MAP를 통과한다.
circling-to-land 도중 시각 참조물을 상실하였다면 적절한 MAP를 수행한다. 착륙 활주로를 향하여 초기 상승 선회를 수행한 다음 missed approach course를 교차 및 비행하기 위해 기동한다.
다음 상황인 경우 조종사는 즉시 MAP를 수행해야 한다:
1. DA/DH나 MDA 미만을 운항하기 위한 조건이 충족되지 않은 경우.
2. MDA 이상에서 circling 도중 공항이 보이지 않는 경우.
3. ATC가 지시한 경우.
Landing
IAP에서 규정하는 시정보다 현재 비행 시정이 더 낮다면 조종사는 착륙을 수행할 수 없다(14 CFR part 91). ATC는 현재 사용중인 활주로의 시정을 조종사에게 제공한다. 이는 우세 시정, RVV(runway visual value), 혹은 RVR(runway visual range)일 수 있다. 허나 비행 시정이 접근 차트의 착륙 조건을 충족하는지에 대한 여부는 오직 조종사만이 판단할 수 있다. 만약 비행 시정이 접근 최저치를 만족한다면 착륙이 가능하다. 만약 비행 시정이 접근 최저치보다 낮다면 조종사는 보고된 시정에 관계없이 실패 접근을 수행해야 한다.
IAP 차트에 게재된 착륙 최저치는 계기 접근 관련 장비들과 visual aids가 전부 작동하는 상태를 기반으로 한다. 장비나 visual aids가 작동하지 않는 경우에는 더 높은 최저치가 필요하다. 예를 들어 만약 ALSF-1 approach lighting system이 작동하지 않는다면 ILS 시정 최저치가 1/4마일 증가해야 한다. 만약 두 개 이상의 장비가 작동하지 않는다면 해당 장비들이 필요로 하는 최저치들 중 가장 높은 값만큼 착륙 최저치가 상승한다. ILS glideslope이 작동하지 않는 상황에 대한 최저치는 localizer minimums로 게재된다. 작동하지 않는 장비가 접근 최저치에 미치는 영향에 대해서는 각 TPP의 “Inoperative Components of Visual Aids Table”를 참조한다.
'Instrument Flying Handbook(2012) > 10: IFR Flight' 카테고리의 다른 글
| (5) Departure Procedures(DPs) (0) | 2023.02.02 |
|---|---|
| (6) En Route Procedures (0) | 2023.02.02 |
| (7) Holding Procedures (0) | 2023.02.02 |
| (9) Instrument Weather Flying (0) | 2023.02.02 |
| (10) Conducting an IFR Flight (1) | 2023.02.02 |