Role of the Controls to Manage Energy State
energy-centered approach는 throttle/elevator가 총 기계적 에너지에 어떻게 영향을 미치는지를 모델링함으로서 단순한 “pitch for airspeed and power for altitude”를 넘어 엔진과 조종간의 역할을 명확히 한다. 에너지의 관점에서 수직 비행경로와 대기속도를 제어하는 문제는 비행기의 에너지 상태(총 에너지의 양, 그리고 고도와 대기속도에 대한 에너지 분배) 중 하나를 다루는 것이다. 따라서 조종사는 무엇이 고도를 제어하고 무엇이 대기속도를 제어하는지 보다는 무엇이 총 에너지를 제어하는지, 그리고 무엇이 고도 및 대기속도에 대한 분포를 제어하는지를 알아야 한다.
Primary Energy Role of the Throttle and Elevator
throttle은 항력에 대해 엔진 추력을 증가시키거나 감소시킴으로서 총 기계적 에너지를 조절한다. 총 에너지의 변화는 추력과 항력의 함수이다(T-D). 그러나 항력은 주로 대기속도의 변화로 인해 긴 시간에 걸쳐 변화되거나, 혹은 항력만 증가시킬 수 있는 high lift/drag devices에 의해 변화된다. 따라서 총 에너지의 변화는 일반적으로 항력이 아닌 추력의 변화에 의해 시작된다. 추력이 항력보다 커지도록 throttle이 설정되면 총 기계적 에너지가 증가한다. 추력이 항력보다 작아지도록 throttle이 설정되면 총 기계적 에너지가 감소한다. 원하는 path-speed profile이 설정되었다면 throttle은 수직 비행경로 및 대기속도가 필요로 하는 총 에너지와 일치하도록 엔진 추력을 설정한다. 따라서 throttle은 total energy controller이다.
반면 elevator는 pitch attitude를 조절하여 수직 비행경로와 대기속도간의 총 에너지 변화를 할당하는 에너지 분배 장치이다. 원하는 path-speed profile이 설정되었다면 elevator는 수직 비행경로 및 대기속도에 대해 필요 되는 에너지 분배가 유지되도록 pitch attitude를 설정한다. 따라서 elevator는 energy distribution controller이다.
throttle과 elevator는 에너지 상태 제어 장치이다. 그러나 둘 중 어느 장치도 고도나 대기속도를 개별적으로 제어하지 않는다. 왜냐하면 고도와 대기속도는 비행기의 총 역학적 에너지를 통해 본질적으로 연결되어 있기 때문이다. 때문에 고도와 대기속도를 효과적으로 제어하기 위해선 두 장치를 모두 조정하여 에너지 상태를 관리해야 한다.
reservoir analogy[그림 4-3]은 에너지에 대한 throttle과 elevator의 역할을 나타낸다. 이 analogy에서 throttle은 net total energy를 조절하는 “valve”를 제어한다. 반면 elevator는 altitude “reservoir”와 airspeed “reservoir”를 오가는 에너지를 분배하는 “valve”를 제어한다. [그림 4-2]의 energy balance equation을 보면 throttle이 방정식의 왼쪽을 제어하는, 그리고 elevator가 방정식의 오른쪽을 제어하는 것이 명확해진다.

throttle이 항력 이상으로 추력을 증가시키면(T-D > 0) 비행기는 총 에너지를 얻는다. throttle이 항력 이하로 추력을 감소시키면(T-D < 0) 비행기는 총 에너지를 잃는다. elevator는 이러한 총 에너지의 증감을 고도와 대기속도 간에 분배한다. throttle이 항력과 추력이 동일하도록 조정되면(T-D = 0) 총 에너지의 변화는 없다. 허나 고도와 대기속도로 저장된 에너지는 elevator를 통해 두 개의 reservoirs 사이에서 교환될 수 있으며 총 에너지는 적어도 짧게나마 일정하게 유지된다.
Additional Role for the Elevator
power required curve의 front side(excess power나 excess thrust가 거의 없는 상태에서(그림 4-4의 A) 낮은 받음각으로 고속 순항을 하는 경우(그림 4-4의 1))일 때 조종간을 당길 경우(elevator up) 짧은 에너지 교환이 발생한다. 이는 비행기가 1에서 2로 감속하게 만든다[그림 4-4]. 이러한 대기속도 감소는 총 항력 감소로 이어진다. 따라서 추력이 항력을 초과하는 지점(T-D > 0)에서 positive excess power(Ps > 0)의 형태로 에너지를 사용할 수 있다. 이러한 excess power(그림 4-4의 B)를 통해 비행기는 정속 상승, 혹은 수평 선회(일정한 속도 및 고도를 유지하면서)를 수행할 수 있다.
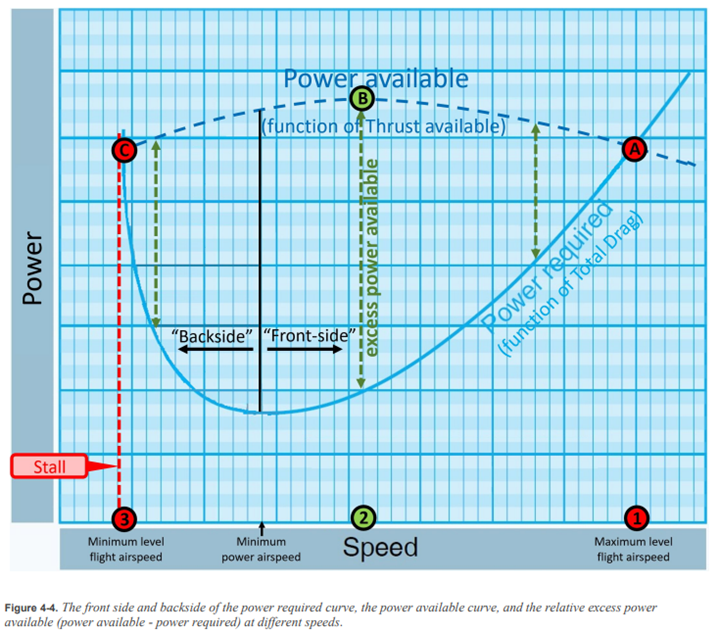
power required curve의 backside(excess power나 excess thrust가 거의 없는 상태에서(그림 4-4의 C) 높은 받음각으로 저속으로 비행하는 경우(그림 4-4의 3))일 때 조종간을 밀 경우(elevator down) 짧은 에너지 교환이 발생한다. 이는 비행기가 3에서 2로 증속하게 만든다[그림 4-4]. 이러한 대기속도 증가는 총 항력 감소로 이어진다. 따라서 추력이 항력을 초과하는 지점(T-D > 0)에서 positive excess power(Ps > 0)의 형태로 에너지를 사용할 수 있다. 이러한 excess power(그림 4-4의 B)를 통해 비행기는 정속 상승, 혹은 수평 선회(일정한 속도 및 고도를 유지하면서)를 수행할 수 있다. elevator의 이러한 역할은 과도한 감속, 혹은 하강률을 방지하는데 매우 중요하다(Preventing Irreversible Deceleration and/or Sink Rate section 참조).
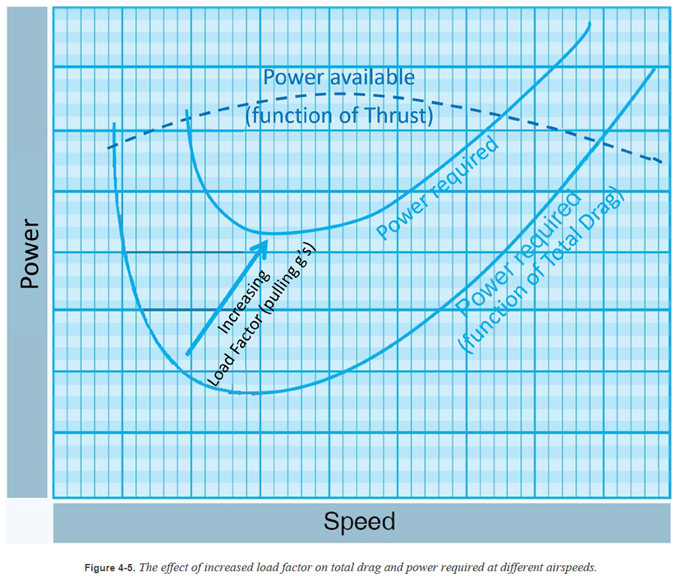
이러한 에너지 교환을 이용한 대기속도 변화를 통해 elevator는 throttle을 보조하여 T-D와 Ps를 변경할 수 있다. 그러나 수평 선회 도중 elevator는 종종 T-D의 “D”를 직접 증가시킬 수 있다. 이는 비행기의 총 에너지가 빠르게 소멸될 수 있도록 만든다. 비행기가 bank 지면 하중 계수(양력/항력)가 증가한다. 왜냐하면 비행기의 무게를 맞춤과 동시에 비행기를 선회로 잡아당기기 위해서는 총 양력이 증가해야하기 때문이다. 이는 받음각을 증가시킴으로써, 즉 조종간을 당김으로써 이루어진다. 허나 이는 유도 항력, 그리고 power required의 증가로 이어진다. 이는 비행기를 빠르게 감속시키며 throttle을 idle로 줄이는 것보다 총 에너지를 더 빠르게 감소시킨다. elevator의 이러한 역할이 그림 4-5에 나타나 있다.
비행기의 에너지 상태를 관리하기 위해 제어 장치들의 각 역할을 적용하는 것은 일련의 간단한 규칙으로 이어진다. 이러한 규칙은 수직 비행경로 및 대기속도를 효과적으로 제어하기 위한 throttle-elevator coordination을 다룬다. 그렇다면 에너지 관리의 기본 규칙은 무엇인가?
'Airplane Flying Handbook(2021) > 4: Energy Management' 카테고리의 다른 글
| (2) Importance of Energy Management (0) | 2023.08.30 |
|---|---|
| (3) Viewing the Airplane as an Energy System (0) | 2023.08.30 |
| (5) Rules of Energy Control (0) | 2023.08.30 |
| (6) Mitigating Risks from Mismanagement of Energy (0) | 2023.08.30 |
| (7) Review of Terms and Definitions (0) | 2023.08.30 |