Mitigating Risks from Mismanagement of Energy
조종사는 잘못된 에너지 관리와 관련된 두 가지 주요 위험을 식별, 평가, 그리고 완화할 수 있는 능력을 갖추어야 한다: 1) 원하는 에너지 상태로부터 발생한 편차. 2) 의도치 않은 irreversible deceleration and/or sink rate로 인해 발생한 기계적 에너지 고갈. 첫 번째 위험은 의도치 않은 altitude-speed deviations를 수반한다(Managing Energy Errors 참조). 두 번째 위험은 available excess power가 거의 없는 상태에서 예상치 못한 지속적 대기속도 및/혹은 고도 손실을 수반한다(Preventing Irreversible Deceleration and/or Sink Rate 참조).
Two Energy Management Scenarios
두 가지 시나리오는 잘못된 에너지 관리와 관련된 두 가지 주요 위험을, 그리고 조종사가 이러한 위험을 식별∙평가∙완화할 수 있는 방법을 보여준다.
Scenario 1
최종 접근 도중 의도치 않게 glideslope 아래로 하강하였으며 적절한 수정을 수행하지 못하였다. [그림 4-9] 비행기를 다시 glideslope으로 되돌리기 위해선 pitch up을 수행해야할까, throttle up을 수행해야할까 둘 다 수행해야할까?

Scenario 2
상승 지형을 향해 비행중이며 지형과 충돌하기 전에 이를 통과할 수 없다. [그림 4-10] 출항 경로를 따라 놓인 상승 지형을 확인하라. 충돌을 피하기 위해 조종사가 할 수 있는 일은 무엇일까?
이 섹션은 올바른 에너지 관리가 조종사에게 위험을 관리하는, 그리고 비극적 결과를 피하는 기술을 어떻게 제공하는지 보여준다.
Managing Energy Errors
안정화된 path-speed profiles를 유지하는 것(예를 들어 glideslope을 tracking 하는 것), 그리고 하나의 프로파일에서 다른 프로파일로 전환하는 것(예를 들어 하강으로부터 level off)을 위한 효과적인 기술을 배우는 것 외에도 조종사는 수직 경로 및 대기속도로부터의 편차를 관리하는 기술(비행기를 target energy state로 되돌리는 기술)을 발달시켜야 한다. “에너지 위기”는 감지되지 않은, 무시된, 혹은 제대로 관리되지 않은 path-speed deviations로부터 시작된다. 따라서 조종사들에겐 이러한 편차들을 인지, 수정, 그리고 예방할 수 있는 기술이 필요하다.
고도 편차와 대기속도 편차를 수정하는 것이 목표이긴 하지만 조종사는 비행기의 에너지 상태에 따라 행동해야 한다. 따라서 altitude-speed deviations를 에너지 오차(energy errors)로 변환하는 것이 중요하다. [그림 4-11] 비행기의 총 에너지는 고도와 대기속도로 분배되므로 두 가지 유형의 에너지 오차가 있다: 1) 총 에너지 오차(total energy error). 2) 에너지 분배 오차(energy distribution error).
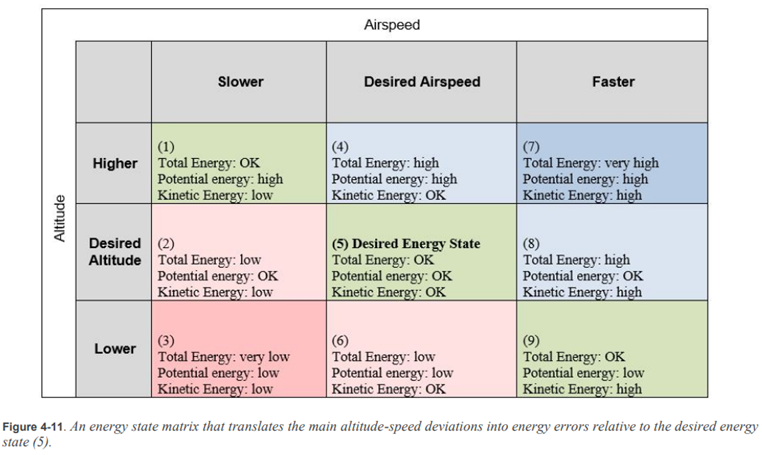
고도계와 속도계를 모니터링 할 경우 조종사는 이러한 두 가지 유형의 에너지 오차를 구분할 수 있다. 총 에너지 오차의 경우 비행기는 에너지가 너무 많거나(파란색 박스), 혹은 에너지가 너무 적다(빨간색 박스). 조종사는 고도와 속도가 동일한 방향으로 벗어나는 것을 알아차릴 것이다(“lower-and-slower”, 혹은 “higher-and-faster”). 반면 에너지 분배 오차의 경우 비행기의 총 에너지는 정확하지만 고도와 속도에 대한 분배는 부정확하다(녹색 박스). 여기서는 고도와 속도가 서로 반대 방향으로 벗어난다(“higher-and-slower”, 혹은 “lower-and-faster”). 이 경우 조종사는 절대적인 고도 값과 속도 값을 처리하는 것이 아닌 상대적 편차를 처리한다.
에너지 관리 원칙에 따라 총 에너지 오차는 throttle을 통해 에너지를 증가, 혹은 감소시켜 수정한다. 반면 에너지 분배 오차는 elevator를 통해 고도와 속도 사이의 에너지 분배를 교환함으로써 수정한다. 총 에너지 오차와 에너지 분배 오차가 합쳐진 경우에는 throttle과 elevator를 동시에 사용하여 수정을 해야 한다. 그림 4-12는 총 에너지 오차와 에너지 분배 오차를 수정하는데 필요한 기술을 정리한 것이다.

시나리오 1은 에너지 오차, 그리고 이를 수정 및 회피하는데 필요한 기술을 설명하기 위한 좋은 예시이다. 그림 4-13은 최종 접근 중인 비행기가 비행경로 아래로 하강하는 세 가지 가능성(B, C, 그리고 D)을 보여준다. 조종사는 pitch up을 수행해야할까, throttle up을 수행해야할까 둘 다 수행해야할까? 이는 상황에 따라 다르다. 조종사는 속도를 확인해야 한다. target airspeed에 비해 실제 속도는 느리거나(B), 빠르거나(D), 혹은 일치(C)할 수 있다. 어떤 경우든 고도 및/혹은 대기속도 편차 발생 후의 최종 목표는 비행기를 올바른 에너지 상태(A)로 되돌리는 것이다.
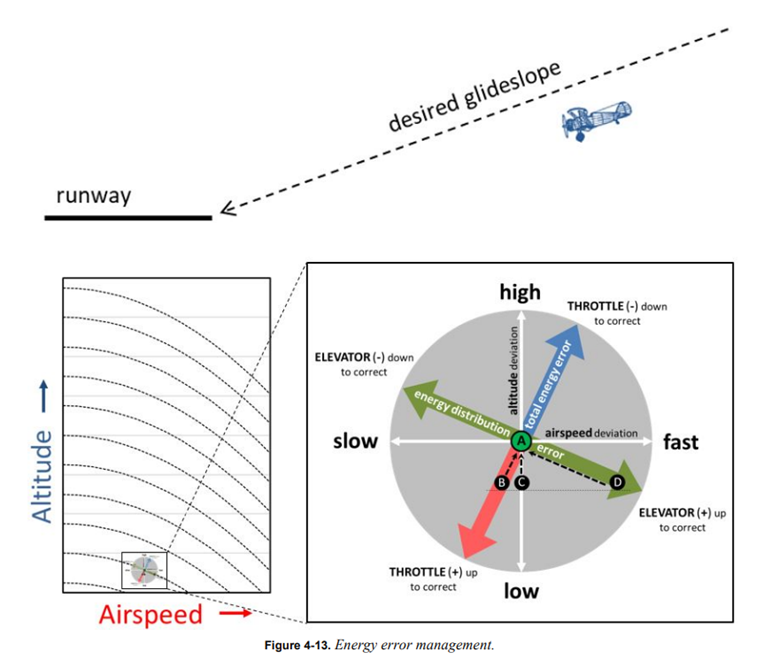
Lower-and-slower(B)는 lower-and-faster(D)와 근본적으로 다르다. 전자의 경우 총 에너지를 다시 얻기 위해 throttle을 전진시켜야 한다(그림 4-12의 3). 반면 후자의 경우 에너지 분배 오차를 없애기 위해 조종간을 당겨야 한다(그림 4-12의 9).
그림 4-13의 B에서 에너지 증가를 위해 throttle을 전진시키는 것은 excess thrust가 존재하는 경우(Ps > 0)에만 가능하다. full throttle을 적용해도 excess thrust가 발생하지 않을 정도로 유도 항력이 매우 높은 속도로 감속한 경우에는 불가능할 수 있다(그림 4-12의 “Cautions When Very Slow” 참조). 비행 조건에 따라 full throttle에서의 available excess power가 음수(Ps < 0)일 수 있다. 이 경우 유일한 방법은 먼저 조종간을 밀어서 고도를 속도로 변환하고, 받음각과 유도항력을 줄이고, throttle을 전진시켜서 총 에너지를 다시 얻는 것이다. 만약 비행기가 지면 근처라면 negative specific excess power를 역전시킴으로써 충돌을 방지할만한 여유가 없을 수 있다.
이제 그림 4-13의 C를 고려해 보자. 여기서 비행기는 비행경로 아래로 하강하였으나 올바른 속도로 비행중이다. 이 경우 속도의 편차는 없으나 총 에너지 오차와 에너지 분배 오차가 합쳐져 있다. 속도 변화 없이 고도를 얻기 위해선 조종간을 조금씩 당김과 동시에 throttle을 전진해야 한다(그림 4-12의 6). 즉, 하나의 변화 없이 다른 하나를 변경하기 위해서는 throttle과 elevator를 동시에 사용해야 한다.
어떤 경우든 경로 및 속도를 주의 깊게 모니터링 함으로써 pitch attitude와 throttle을 적절히 조종해야 한다. 편차가 수정되었다면 원하는 path-speed profile을 유지하기 위해 비행기를 trim 해야 한다(그림 4-12의 5).
앞서 approach-to-landing 시나리오는 altitude-speed deviations를 잘못 관리하였을 때의 위험을 보여주는 하나의 예시일 뿐이다. 비행의 어떤 단계에서든(장주 패턴, 이륙 및 상승, 순항 비행, 하강, 그리고 선회를 수반하는 절차나 기동 포함) 조종사는 고도 및/혹은 대기속도의 편차를 식별, 평가, 그리고 완화할 수 있어야 한다.
path-speed deviations를 신속하게 수정하는 기술을 비행 안전을 향상시킬 수 있다. 허나 비행기의 기계적 에너지가 회복 불가능할 정도로 고갈될 위험 또한 인지하고 있어야 한다(특히 비행기가 flight envelope의 가장자리, 즉 available excess power가 0인 지점에 접근할 때).
Preventing Irreversible Deceleration and/or Sink Rate
정상 비행 도중 비행기는 negative specific excess power(Ps < 0)를 많이 경험한다(예를 들어 일정한 고도로 감속하는 도중, 혹은 일정한 속도로 하강하는 도중). 이는 의도된 에너지 손실률이다. 그러나 에너지 상태를 잘못 관리하는 것의 가장 큰 위험 중 하나는 positive excess power available이 거의 없는 상태에서 의도치 않은 excessive deceleration and/or sink rate가 발생하는 것이다. 특정 critical altitude 이상으로 회복하지 못하면 기계적 에너지가 고갈된다. 이 시점을 지난 후에는 조종사가 무엇을 하든 비행기가 지면에 충돌할 것이다.
의도치 않은 에너지 고갈의 위험을 이해하기 위해 시나리오 2를 자세히 살펴보자[그림 4-10]. 이러한 시나리오는 범용 항공에서 아주 흔한 상황이다: 상승 지형을 향해 비행중이며 지형과 충돌하기 전에 이를 통과할 수 없음.
시나리오는 다음과 같다:
1. 자연 흡기식 twin-engine airplane의 조종사가 여름날 아침 KBJC(Rocky Mountain Metropolitan airport)에서 KASE(Aspen/Pitkin County airport)로 비행한다.
2. 날이 더운 이른 오후 조종사는 Aspen에서 집으로 되돌아가기로 결정하였다.
3. 조종사가 runway 33에서 KASE로부터 이륙하였다. full throttle/power가 비행기를 가속하는데 더 오래 걸렸지만 정상 속도에서 rotate 하였다.
4. 조종사가 정상 pitch target으로 자세를 잡고, gear를 올렸으며, 상승을 시작하였다.
5. 조종사는 비행기가 원하는 대로 작동하지 않음을 확인하였다. 조종사는 gear가 올라가 있는지를 확인하였다. 그리고 조금 더 많은 출력을 얻기 위해 mixture를 조정하였다.
6. 상승 지형 앞에서 조종사는 점진적으로 pitch를 올렸고 비행기가 감속하기 시작하였다.
7. 비행기가 상승을 중단하였다.
8. stall horn이 울리기 시작하였다.
이는 가상의 시나리오이다. 허나 비극적으로 종료된 이와 유사하게 사건들이 있었다.
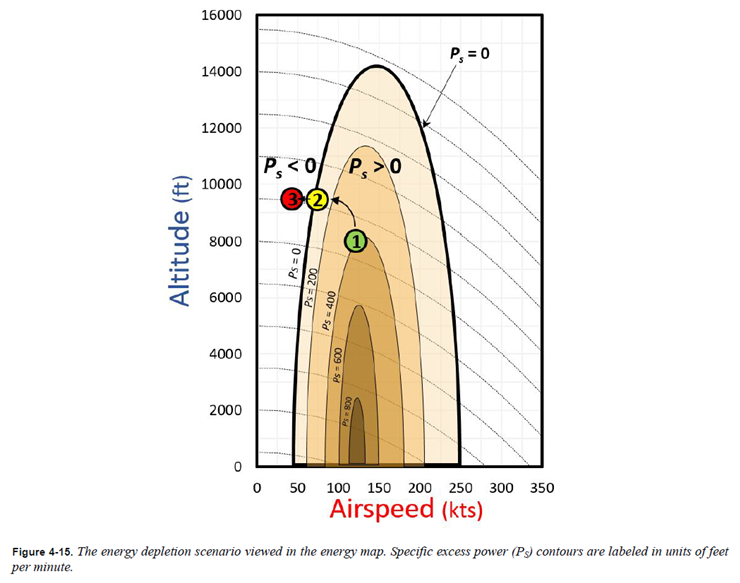
이 시나리오에서 비행기는 의도치 않은, 그리고 되돌릴 수 없는 감속 및 침하율을 직면하였다. 이는 전형적인 power curve를 통해[그림 4-14], 그리고 energy map를 통해[그림 4-15] 두 가지 방법으로 나타낼 수 있다:

비행기의 power required curve와 power available curve에서 비행기는 1번 속도(A: power available이 power required보다 큰 지점)로 상승하여 2번(비행기가 상승을 중단하는 속도. B: power available이 power required와 동일한 지점), 그리고 3번(stall horn이 울리는 속도. C: power available이 power required보다 적은 지점)으로 감속한다[그림 4-14]. energy map은 기계적 에너지의 관점에서 동일한 내용을 나타낸다[그림 4-15]: 비행기는 1번 지점(Ps > 0)에서 상승하여 2번(비행기가 상승을 중단하는 지점. Ps = 0), 그리고 3번(stall horn이 울리는 속도. Ps < 0)으로 감속한다.
그렇다면 이 상태를 회복하기 위해 조종사는 무엇을 해야 하는가? 답은 올바른 에너지 관리이다. energy map 상 비행기가 상승을 다시 시작할 수 있는 위치로 비행기가 이동해야 한다. 그렇다면 이는 무엇을 의미하는가?
• 이는 그림 4-12의 desired altitude • cautions when very slow 상황과 유사하다.
• 조종사는 직관적인 행동을 수행해선 안 된다. full throttle을 적용하였을 시 상승 성능을 향상하기 위해 초반에는 약간의 고도를 희생하여 증속하는 것을 고려한다.
• Ps > 0인 대기속도로 가속하였다면 다시 상승을 시작할 수 있다.
이러한 회복 시나리오는 그림 4-16의 energy map에 나타나 있다. 이는 의도치 않은, 그리고 위험한 deceleration and/or sink rate를 회복하는데 있어 elevator의 중요한 역할을 보여준다(Additional Role for the Elevation 참조).

약간의 고도를 희생하여 비행기를 증속해야 한다(3번 지점(Ps < 0)에서 4번 지점(Ps > 0)으로 이동). 그런 다음 원하는 target airspeed와 target altitude로 5번 지점을 향해 정속 상승을 시작할 수 있다[그림 4-16]. 상승 지형을 위한 target climb airspeed는 VX(speed for best angle of climb)일 수 있음을 유념한다. 비록 VX는 VY(speed for best rate of climb)보다 약간 느리지만 더 깊은 상승 각도를 만들어낸다. 의도치 않은 대기속도 손실로부터 회복된 다음 VX로 상승하기 시작하였다면 조종사는 상황을 분석한 다음 차후의 위험을 완화하기 위한 결정(계속하여 상승할지, 혹은 다른 무언가를 수행할지)을 내려야 한다. 의도하는 경로 상에서 상승 지형을 안전하게 회피할 성능이 부족한 경우 조종사는 다른 선택지를 수행할 수 있다: 180도 선회를 한 다음 출항 공항에 착륙한다. 그리고 온도와 밀도 고도 조건이 개선되기 전까지 기다린다.
이러한 상승 지형 시나리오는 irreversible deceleration and/or sink rate의 위험을 보여주는 하나의 예시일 뿐이다. 의도치 않은 기계적 에너지 고갈은 다양한 상황에서 발생할 수 있음을 조종사는 인지해야 한다(특히 낮은 고도에서 energy envelope의 low-speed edge에 접근할 때. 즉, available specific excess power(Ps)가 0일 때). 그 예시로는 불안정한/저속 접근, go-around 도중 gear 및/혹은 flaps를 올리는 것을 잊어 발생한 높은 항력, 그리고 장주 패턴 도중 steeper-than-normal turns가 포함된다. irreversible sink rates가 반드시 임계 받음각을 초과하여 실속과 스핀을 초래하지는 않음을 유의한다. energy envelope의 high-speed edge(available specific excess power(Ps)가 0일 때) 근처에서 비행기는 실속에 빠지지 않으나 여전히 unrecoverable sink rates를 경험할 수 있다. 두 가지 예시로는 잘못 수행된 steep level turns 이후의 high-speed steep spirals, 그리고 지면 근처에서의 high-speed dives가 있다.
특정 비행 조건에서 의도치 않은 negative specific excess power를 경험하는 경우 조종사는 신속한 회복, 그리고 적절한 후속 조치를 허용하는 에너지 관리를 사용해야 한다.
'Airplane Flying Handbook(2021) > 4: Energy Management' 카테고리의 다른 글
| (3) Viewing the Airplane as an Energy System (0) | 2023.08.30 |
|---|---|
| (4) Role of the Controls to Manage Energy State (0) | 2023.08.30 |
| (5) Rules of Energy Control (0) | 2023.08.30 |
| (7) Review of Terms and Definitions (0) | 2023.08.30 |
| (8) Chapter Summary (0) | 2023.08.30 |