Weather Considerations
착륙 예정지의 기상 조건에 따라 조종사의 계기 접근 계획 여부가 결정된다. 또한 많은 경우 어떤 접근이 사용될 수 있는지가, 혹은 접근이 시도될 수 있는지가 결정된다. 기상 정보를 수집하는 것은 접근 계획 도중 가장 먼저 수행해야 하는 것들 중 하나이다. 기상 정보에는 여러 가지 유형이 있지만 접근을 결정할 때 주로 고려해야 하는 것은 풍향, 풍속, ceiling, visibility, altimeter setting, 온도, 그리고 활주로 상태이다. 또한 비행 전 계획 이후 변경사항이 발생하였을 경우를 대비하여 NOTAM을 확인하는 것이 좋다.
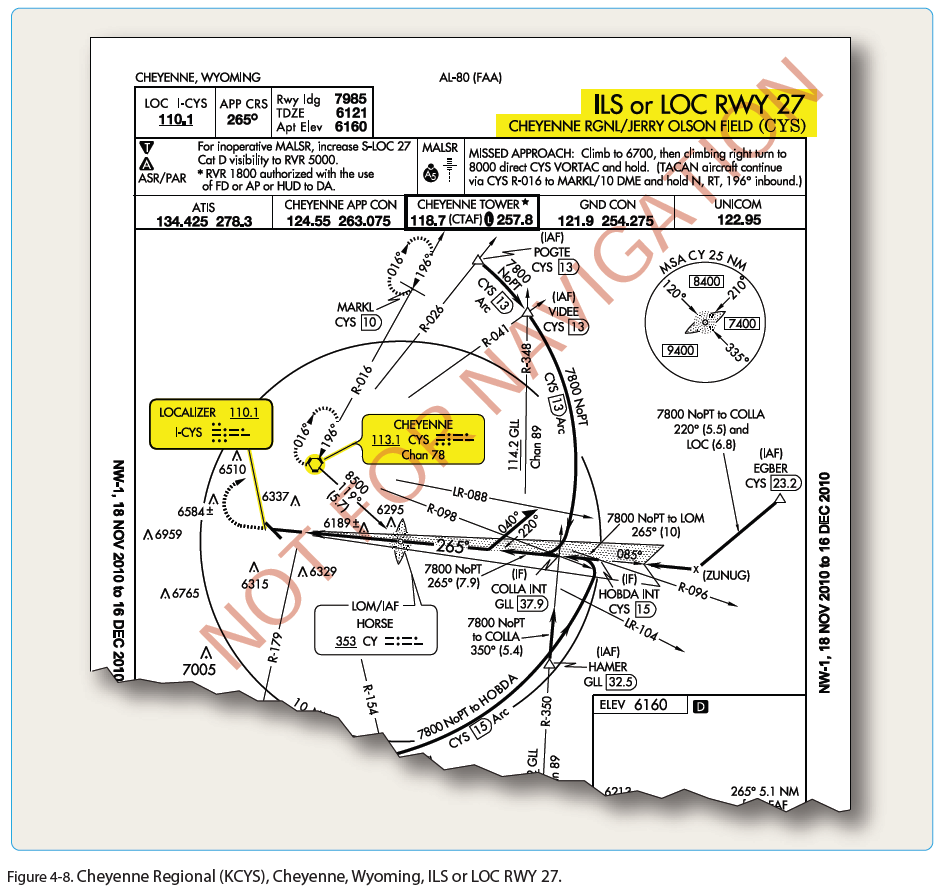
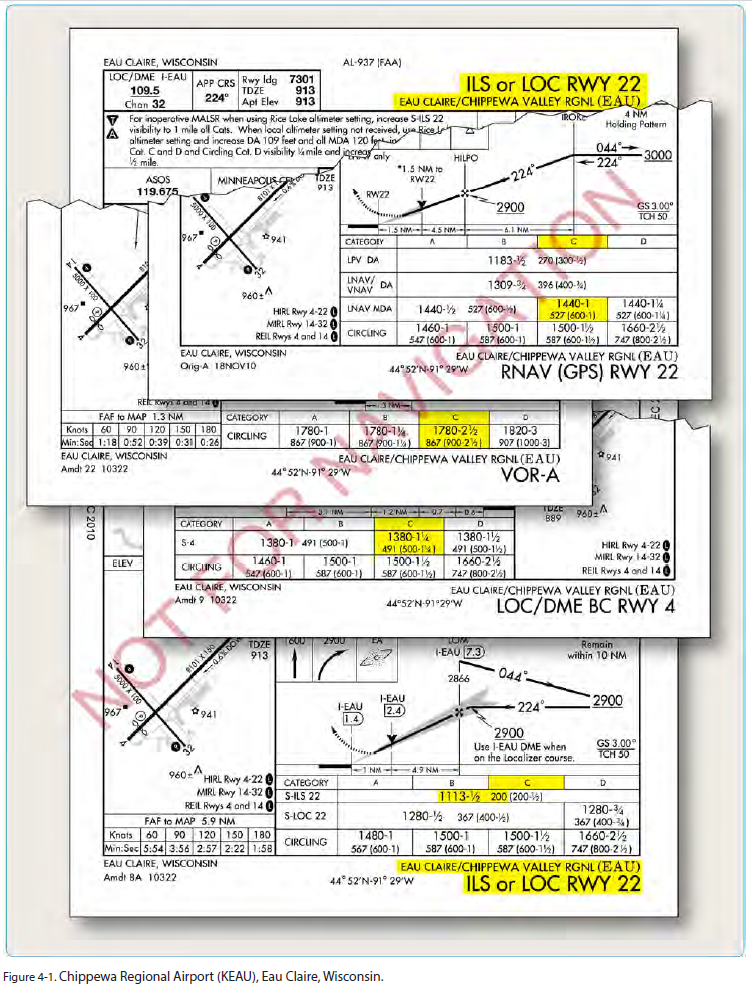
풍속 및 풍향은 중요한 요소이다. 이는 특정 위치에서 비행될 수 있는 접근 유형을 제한하는 경우가 많기 때문이다. 보통 여러 개의 정밀 접근을 갖춘 공항에서는 이러한 요인이 문제가 되지 않는다. 허나 하나의, 혹은 소수의 접근 절차만을 갖춘 공항의 경우 바람과 시정의 조합으로 인하여 모든 계기 접근이 불가능해질 수 있다. 조종사는 계획하였던 접근 이외의 것을 수행할 준비가 되어 있어야 한다. 다음 예시를 고려해보자. [그림 4-1] 시정이 1마일 미만으로 보고되는 경우 Category C 항공기가 이용 가능한 접근은 runway 22로 향하는 ILS(Instrument Landing System)와 LNAV(lateral navigation)/VNAV(vertical navigation) 뿐이다. 만약 바람이 runway 22에 적절하지 않다면 조종사에겐 선택의 여지가 거의 없다. 심지어 시정으로 인하여 circling approach도 비행할 수 없다.
Weather Sources
조종사들이 받는 대부분의 기상 정보는 각 비행 구간이 시작되기 전에 제공된다. 허나 계기 접근의 계획 및 수행을 위한 정보는 en route에서 정부 소스, 회사 주파수, 혹은 ACARS(Aircraft Communications Addressing and Reporting System)을 통해 얻어진다.
Part 119(Certification: Air Carriers and Commercial Operators)에 따라 증명된 항공사 및 운영자는 운영기준(OpSpecs)에서 규정하는 항공 기상 정보 시스템을 사용해야 한다. 운영기준에서 승인된 경우 이러한 시스템은 FAA/NWS(National Weather Service) 기상 서비스, 계약자나 운영자 소유의 기상 서비스, 그리고/혹은 EWINS(Enhanced Weather Information System)을 사용할 수 있다. EWINS를 위해선 조종사 및 운항관리사의 훈련, 그리고 항공 기상 정보의 수집∙생산∙전파를 위한 절차가 승인되어야 한다.
14 CFR Part 119에 따라 증명되지 않은 운영자는 FSS(Flight Service Stations)를 통해 FAA/NWS 정보를 사용하도록 권장된다. FSS는 기상 브리핑, en route 기상, IFR 및 VFR 비행 계획서의 수신 및 처리, ATC clearances 전달, 그리고 NOTAM 발부를 제공한다. 또한 FSS는 길을 잃은 항공기와 비상 상황 항공기에게 지원을 제공하며 VFR search and rescue 서비스를 수행한다.
DUATS(Direct User Access Terminal System)는 모든 조종사가 컴퓨터를 통해 기상 정보를 사용할 수 있도록, 그리고 비행 계획서를 제출할 수 있도록 해준다. 현재 두 개의 계약 업체가 DUATS에 정보 서비스를 제공하고 있다.
FIS-B(Flight Information Service – Broadcast)는 적절한 조종실 화면을 갖춘 항공기에게 특정 항공 기상 정보와 기타 항공 정보를 제공한다. 항공기와 지상국 사이의 가시선이 유지된다면 지상국 범위 내에서 FIS-B 서비스를 수신할 수 있다. FIS-B는 다음과 같은 기상 정보와 항공 정보를 텍스트 및 그래픽으로 제공한다.
∙ADDS(Aviation Digital Data Services)는 기상 변수들의 예보, 분석, 그리고 관측을 제공한다.
∙HIWAS(Hazardous In-flight Weather Advisory Service)는 특정 항법 보조 장치(NAVAIDs)를 통해 위험 기상 정보를 지속적으로 방송하는 프로그램이다. 방송에는 advisories(예를 들어 AIRMETs, SIGMETs, convective SIGMETs, PIREPs/UUA, AWW, 그리고 CWA)가 포함된다. 이러한 방송은 요약된 정보일 뿐이므로 조종사는 자세한 정보를 위해 FSS(122.2MHz)에 교신해야 한다.
∙TIBS(Telephone Information Briefing Service)는 Flight Service에 의해 준비 및 배포되는 서비스이다. 이는 기상 정보 및 항공 정보 녹음을 지속적으로 제공한다. TIBS는 area briefing과 route briefing을 제공하며 해당하는 경우에는 공역 절차와 특별 공지도 제공한다. 이는 preliminary briefing으로 설계되었으며 standard briefing을 대체하기 위한 것이 아니다. TIBS service는 24시간 이용 가능하며 상황 변화 시 업데이트 된다. 이는 전화로만 이용 가능하다. 또한 TIBS에는 surface observations, TAFs(terminal aerodrome forecast), 그리고 winds/temperatures aloft forecasts가 포함되어야 한다.
통신 기능의 발전으로 인하여 조종사는 더 넓은 범위의 기상 서비스 제공업체와 독점 제품을 이용할 수 있게 되었다. FAA는 운영자가 이러한 기상 정보를 사용하는 것을 제한하지 않는다. 허나 FAA, NWS, 혹은 이들의 계약자(예를 들어 DUATS와 FISDL(flight information services data link))가 아닌 기관에서 제공하는 기상 서비스가 FAA/NWS의 기준을 충족하지 못할 수 있음을 알아야 한다.
Broadcast Weather
조종사들이 특정 기상 정보를 얻기 위해 사용하는 가장 일반적인 방법은 특정 공항에 대한 기상 방송 정보원을 사용하는 것이다. 대부분의 기상 방송 서비스로부터 ceilings, visibility, 바람, 온도, 대기압, 그리고 활주로 상태에 대한 정보를 얻을 수 있다. 기상 방송은 라디오 음성 형식으로, 디지털 형식으로, 혹은 가능한 경우 ACARS system을 통해 항공기에 전송될 수 있다.
Automated Terminal Information Service(ATIS)
ATIS는 녹음된 비관제 정보를 항적이 많은 특정 terimal areas에 끊임없이 방송한다. 그 목적은 관제사의 효율성을 향상시키는 것, 그리고 필수 정보를 자동으로 송신함으로써 주파수 혼잡을 완화하는 것이다. 해당 정보는 discrete VHF radio frequency를 통해, 혹은 NAVAID의 voice portion을 통해 지속적으로 방송된다. discrete VHF radio frequency를 통해 전송되는 ATIS는 최대 60NM까지 수신될 수 있도록, 그리고 최대 25,000ft까지 수신될 수 있도록 설계되었다. 대부분의 경우 공항 표면에서 ATIS 신호를 수신할 수 있다. 허나 지역 조건에 따라 최대 ATIS 수신 거리 및/혹은 고도가 제한될 수 있다. ATIS program은 approach control, ground control, 그리고 local control 주파수의 혼잡을 완화하므로 조종사의 협조가 권장된다.
ATIS 정보에는 최신 기상 관측 시간, ceiling, visibility, obstructions to visibility, 온도, 이슬점, 풍향(magnetic), 풍속, altimeter, 기타 관련 정보, 계기 접근, 그리고 사용 활주로가 포함된다. ceiling이 5,000ft를 초과하며 시정이 5마일을 초과하는 경우에는 ceiling/sky condition, visibility, 그리고 obstructions to vision이 생략될 수 있다. departure runway가 landing runway와 다른 경우에만 해당 정보가 제공된다(단, departure를 위한 별도의 ATIS를 갖춘 경우 제외). ATIS에는 VFR 입항 항공기가 접근 관제소와 교신할 주파수 및 지침을 포함할 수 있다. terminal area로부터 입출항하는 조종사는 조종실 업무가 여유로울 때 ATIS를 수신할 수 있으며 원하는 만큼 반복 청취할 수 있다. ATIS 방송은 공식적인 시간대마다, 그리고 특별한 날씨를 수신할 때마다 업데이트되어야 한다. 그 외의 정보가 변경되는 경우에도 새로운 ATIS가 만들어져야 한다(예를 들어 활주로 변경, 현재 사용 중인 계기 접근, 등등).
Automated Weather Observing Programs
Automated weather reporting systems가 점점 더 많이 공항에 설치되고 있다. 해당 시스템은 다양한 센서, 프로세서, 컴퓨터 음성 시스템, 그리고 분 단위의 기상 정보를 조종사에게 방송하기 위한 송신기로 구성되어 있다.
Automated Weather Observing System
AWOS(automated weather observing system)의 관측 자료에는 “AUTO”라는 접두사가 포함된다. 이는 해당 정보가 자동 시스템으로부터 파생되었음을 나타낸다. 일부 AWOS 자료는 관측자에 의해 보강된다. 보고된 시정이 7마일 미만일 경우 관측자는 보고의 remarks에 기상 정보와 시정 차폐물 정보를 제공한다. 관측 자료의 보강은 “OBSERVER WEATHER”를 통해 식별된다. AWOS의 풍속, 풍향, 돌풍, 온도, 이슬점, 그리고 altimeter setting은 수동 관측과 동일하다. 또한 밀도 고도가 field elevation으로부터 1,000ft를 초과하는 경우에는 밀도 고도가 보고된다. 시정은 primary instrument runway의 touchdown 근처에 위치한 센서로부터 도출된다. 시정 센서의 산출 값은 10분간의 조화 평균을 통해 시정으로 변환된다. sky condition/ceiling은 시정 센서의 옆에 위치한 운고계로부터 도출된다. AWOS은 지난 30분간의 운고계 정보를 통합하여 구름 층 및 높이를 도출한다. 해당 정보는 관측자의 정보와 다를 수 있다. 왜냐하면 AWOS는 센서 상공의 구름 움직임만을 전적으로 의존하기 때문이다.
Automated Surface Observing System(ASOS)/Automated Weather Sensor System(AWSS)
ASOS/AWSS는 항공 운항, 그리고 기상 예보 활동을 지원하도록 설계되었다. ASOS/AWSS는 분 단위 관측 자료를 연속적으로 제공하며 METAR와 기타 항공 기상 정보를 생성하는데 필요한 관측을 수행한다. 해당 정보는 discrete VHF radio frequency를 통해, 혹은 NAVAID의 voice portion을 통해 전송될 수 있다. discrete VHF radio frequency를 통해 전송되는 ASOS/AWSS는 최대 25NM까지 수신될 수 있도록, 그리고 최대 10,000ft AGL까지 수신될 수 있도록 설계되었다.
대부분의 경우 공항 표면에서 ASOS/AWSS 신호를 수신할 수 있다. 허나 현지 조건으로 인하여 최대 수신 거리 및/혹은 고도가 제한될 수 있다. 데이터를 수집 및 해석하는 방법은 자동 시스템과 관측자간에 차이가 있을 수 있으나 둘 다 매우 유사한 관측 자료를 생성한다. 객관적인 요소의 경우(예를 들어 압력, 주변 온도, 이슬점 온도, 바람, 그리고 강수 축적) 자동 시스템과 관측자는 모두 특정 위치와 시간 평균(time-averaging) 기법을 사용한다. 이러한 요소들에 대한 자동 시스템과 관측자 간의 차이는 무시할 수 있을 정도로 작다. 허나 주관적인 요소의 경우 관측자는 시각적 요소들(구름, 시정, 그리고 기상 등등)을 설명하기 위해 특정 시간과 공간 평균(spatial averaging) 기법을 사용하는 반면 자동 시스템은 특정 위치와 시간 평균 기법을 사용한다. 이는 근본적인 변화이지만 수동 기법과 자동 기법은 각 한계 내에서 매우 유사한 결과를 도출한다.
Part 91 operators의 경우 앞서 언급한 시정 보고와 기상 서비스를 사용하지 않아도 된다. Part 121/135 operators는 각각의 운영기준을 따라야 하며 NWS(혹은 그 외 승인된 출처)가 제공하는 기상 보고를 사용해야 한다. 대부분의 운영자들은 ATIS 정보, RVR(runway visual range) reports, 그리고 automated weather stations의 특정 보고를 사용해야 한다. Part 121/135 operators는 AWOS-3 station이 제공하는 모든 보고들을 사용할 수 있다. 각 유형의 automated station은 각각의 운영기준에서 명시된 대로 서로 다른 승인 수준을 가지고 있다. 출항 정보와 함께 타워가 제공하는 ceiling/visibility reports는 공식 기상으로 간주되며 RVR reports는 보통 통제 시정(controlling visibility) 기준이 된다.
Center Weather Advisories(CWA)
CWA는 unscheduled weather advisory이다. CWA의 짧은 리드 타임 특성상 이는 비행 계획을 위한 정보가 아니다. CWA는 일반적으로 차후 2시간 이내에 시작되는 상황에 대한 예보이다. CWA는:
1. 기존 SIGMET, Convective SIGMET, 혹은 AIRMET의 보충 자료로 발부된다.
2. Inflight Advisory가 발부되지 않았으나 최신 조종사 보고나 그 외 정보 출처에서 비롯된 현재(혹은 예상) 기상 조건이 SIGMET/AIRMET 기준을 만족하는 경우 발부된다.
3. 관측된(혹은 발달중인) 기상 조건이 SIGMET, Convective SIGMET, 혹은 AIRMET 기준을 충족하지 않지만(예를 들어 강도나 범위의 측면에서) 최신 조종사 보고나 그 외 기상 정보 출처에서 비롯된 현재(혹은 예상) 기상 조건이 ARTCC 책임 구역 내 항공 교통 흐름에 악영향을 미칠 것으로 판단되는 경우 발부된다.
Weather Regulatory Requirements
계기 접근을 시작하기 전에 기상 정보를 검토하는 데에는 많은 이유가 있다. 조종사들은 각 공항 및 활주로의 상황을 숙지함으로써 연료 관리, 우회, 그리고 대체 계획에 관하여 정보에 입각한 결정을 내릴 수 있어야 한다. 이러한 정보는 매우 중요하므로 14 CFR은 계기 비행의 계획 및 수행에 대해 특정 weather minimums를 준수하도록 요구한다.
Weather Requirements and Part 91 Operators
14 CFR Part 91, 91.103에 따라 PIC는 출항 전에 비행과 관련된 모든 정보를 숙지해야 한다. 이 조항에는 조종사가 의도하는 비행경로와 관련된 NOTAM과 기상 보고/예보를 검토해야 하는 근거가 포함되어 있다. 이러한 검토에는 모든 착륙 예정 지점 및 교체비행장에 대한 최신 기상 보고/예보가 포함되어야 한다. 또한 조종사는 계기 접근을 수행하기 전에 공항의 현재 기상 조건을 철저히 검토해야 한다. 또한 조종사는 연료 관리를 위한 계획 수단으로서 기상 정보를 고려해야 한다.
비행 계획 도중 교체비행장의 필요성과 적합성을 결정하기 위하여 기상 정보를 검토해야 한다. Part 91 operations의 경우 600-2 법칙과 800-2 법칙이 각각 정밀 접근과 비정밀 접근을 갖춘 공항에 적용된다. APV(Approaches with vertical guidance)는 비정밀 접근이다. 왜냐하면 APV는 정밀 접근에 대한 ICAO Annex 10 기준을 만족하지 않기 때문이다. 600-2 법칙과 800-2 법칙에 대한 예외가 존재하는 경우에는 접근 차트에 아래의 기호가 표시된다.
기상 조건이 이 alternate minimums 미만이라 해서 교체비행장에서 계기 접근을 수행할 수 없는 것은 아니다. 600-2 법칙, 800-2 법칙, 혹은 alternate minimums는 비행 계획 목적에만 적용된다. 즉, 교체비행장에서 실제 접근을 수행할 때에는 차트에 게재된 landing minimums가 적용된다.
Weather Requirements and Part 135 Operators
part 135 operators의 경우 part 91 operators와는 달리 예보 기상이 계기 접근 및 착륙을 허용하지 않는 한 해당 목적지로 출항할 수 없다. 조종사와 운항 관리사는 최신 기상 보고/예보를 통해 ETA(estimated time of arrival)에서의 기상 조건이 IFR landing minimums 이상인 경우에만 해당 공항을 목적지로 지정할 수 있다. 때문에 part 135 operators는 목적지의 적합성을 결정할 때 기상 예보를 고려한다. 설령 현재 기상 조건이 IFR landing minimums 미만이라 하더라도 ETA에서의 기상 조건이 IFR landing minimums 이상이라는 기상 예보가 존재한다면 해당 공항으로 출항할 수 있다. 반면 현재 기상 조건이 IFR landing minimums 이상이지만 ETA에서의 기상 조건이 IFR landing minimums 미만이라면 출항이 금지된다(14 CFR Part 135, 135.219).
part 91 operation과 part 135 operation의 또 다른 차이점은 비행이 시작된 후 착륙 예정 공항이 특정 기상 조건을 충족해야 한다는 part 135 requirement이다. part 135의 경우 출항 계획을 위해 기상이 IFR landing minimums 이상으로 예보되어야할 뿐만 아니라 계기 접근을 수행하기 위해서도 기상이 IFR landing minimums 이상이어야 한다. 또한 접근이 시작된 후 final approach segment를 비행하기 위해서도 기상이 IFR landing minimums 이상이어야 한다. 최신 기상 보고의 기상 조건이 IFR 착륙 최저치 이상을 나타내지 않는 한 조종사는 계기 접근을 시작할 수 없다(14 CFR Part 135, 135.225). 기상 보고를 수신하였을 때 항공기가 이미 FAF(final approach fix)를 통과한 경우에는 이러한 규칙이 완화된다. 항공기의 진행 가능 여부를 결정하는 변수는 시정이라는 점을 유의해야 한다. 만약 RVR을 사용할 수 있다면 이는 이 섹션의 조건이 충족되는지를 판단하기 위한 통제 시정이다. 법정 마일(SM) 단위로 보고되는 RVV(runway visibility value)는 우세 시정(prevailing visibility)보다 우선된다. 접근을 시작하기 전에 최신 기상을 수신해야 하는 시간대 조건은 없다.
※ 다음은 Advisory Circular 120-118을 발췌한 내용이다.
4-3. CONTINUING APPROACHES IN DETERIORATING WEATHER CONDITIONS.
a. 비록 14 CFR은 "approach ban"이란 용어를 정의하지 않지만 이는 121.651, 125.381, 그리고 135.225에 나와 있는 정보를 의미한다. 계기 접근의 final segment를 시작하기 전에 기상 조건이 착륙 최저치 이상이어야 한다. 허나 앞서 언급한 운항 규정의 적용 여부와 해당 규정이 적용되는 지점은 특정 국내 운항 및 국제 운항의 경우 다를 수 있다.
※ 다음은 Jeppesen airway manual을 발췌한 내용이다.
18 COMMENCEMENT AND CONTINUATION OF APPROACH (APPROACH BAN)
CAT.OP.MPA.305 - Commencement and continuation of approach
a. 조종사는 reported RVR/VIS와 관계없이 계기 접근을 시작할 수 있다.
b. 만약 reported RVR/VIS가 해당 접근의 최저치 미만이라면:
1. 공항으로부터 1,000ft AGL 아래로 접근할 수 없다. 혹은,
2. final approach segment로 진입할 수 없다(DA/H나 MDA/H가 공항으로부터 1,000ft AGL 위에 존재하는 경우).
c. RVR을 사용할 수 없는 경우에는 reported visibility를 RVR로 변환할 수 있다.
d. 공항으로부터 1,000ft AGL을 통과한 후에 reported RVR/VIS가 해당 접근의 최저치 미만으로 떨어진 경우에는 DA/H나 MDA/H로 계속 접근할 수 있다.
e. DA/H나 MDA/H에서 적절한 visual reference를 확인하였다면 DA/H나 MDA/H 아래로 접근을 계속할 수 있다.
f. touchdown zone RVR은 항상 주된 기준이 된다. 만약 midpoint RVR와 stopend RVR이 보고되었으며 관련이 있다면 이 값들도 기준이 된다. midpoint를 위한 최소 RVR은 125m(혹은 touchdown zone에 필요한 RVR 값)이어야 하며 stopend를 위한 최소 RVR은 75m이어야 한다. rollout guidance control system을 갖춘 항공기의 경우에는 midpoint를 위한 최소 RVR이 75m이어야 한다.
※ 다음은 대한항공 계기비행 교재를 발췌한 내용이다.
3. Approach Ban
계기접근을 시작하기 위해서는 보고된 기상상태가 최저 착륙 기상치 이상이어야 한다. 계기접근을 시작하여 항공기의 위치가 Final Approach Fix(FAF가 없는 경우에는 계기접근 절차의 최종접근 단계가 시작되는 지점) 통과 후에는 기상이 최저 기상치 미만으로 보고될지라도 DA(H)/MDA(H)까지 접근을 계속할 수 있으며, 그때 실제 기상이 최저착륙치 이상일 경우에는 착륙할 수 있다. 그러나 CAT III 접근 중 Controlling RVRs이 허용된 착륙 제한치 미만으로 보고되면 Missed Approach를 수행하여야 한다. Approach Ban (일명: 접근 제한 규정)은 관제 관할 국가마다 정해진 별도의 규정에 따라 다를 수 있으며, 따라서 접근할 때는 해당국가에 대한 규정을 Jeppesen ATC Part를 통해 Approach Ban을 확인한 후 비행해야 한다. 여기서는 FOM상에 명시된 사항을 언급하고 있다.
Weather Requirements and Part 121 Operators
Part 121을 따르는 조종사와 운항관리사는 Part 135 operators와 마찬가지로 적절한 기상 보고/예보를 통해 ETA에서의 기상 조건이 IFR landing minimums 이상임을 확인해야 한다(14 CFR Part 121, 121.613). 이 규정은 조종사가 목적지 공항에서 항상 계기 접근을 수행할 수 있도록 보장하기 위함이다. 물론 기상 예보가 부정확할 수도 있으므로 접근을 수행하기 전에 현재 기상을 철저히 검토해야 한다. Part 121 operators도 Part 135 operators와 마찬가지로 적절한 IFR 착륙 최저치가 존재하지 않는 한 FAF를 통과할 수 없다. MDA(minimum descent altitude), DA(decision altitude), 혹은 DH(decision altitude) 미만으로 하강하기 위한 규정은 Part 91 operators에게 적용되는 것과 동일하다(단, 한 가지 예외가 있는데 바로 Part 121/135 operation 도중에는 비행기가 TDZ [touchdown zone] 이내에 착륙해야 한다).
'Instrument Procedures Handbook(2017) > 4: Approaches' 카테고리의 다른 글
| (1) Introduction (0) | 2024.01.10 |
|---|---|
| (2) Approach Planning (1) | 2024.01.10 |
| (4) Aircraft Performance Considerations (1) | 2024.01.09 |
| (5) Instrument Approach Charts (0) | 2024.01.09 |
| (6) Communications (1) | 2024.01.09 |