터보프로펠러 비행기가 비행하는 medium altitude와 high altitude는 규제 사항, 공역 구조, 생리학적 조건, 그리고 기상학적 측면에서 완전히 다른 환경을 제공한다. 터보프로펠러 비행기 조종사는 이를 염두에 두고 훈련을 접근해야 한다(특히 high/medium altitude에서의 운영에 익숙하지 않은 조종사들). 철저한 ground training은 high/medium altitude flight의 모든 측면을 다루어야 한다. 여기에는 비행 환경, 기상, 비행 계획 및 항법, 고고도 비행의 생리학적 측면, 산소 및 여압 시스템의 작동, 그리고 고고도 비상 상황을 포함한다.
flight training을 통해 조종사는 비행기 성능, 시스템, 비상 절차, 그리고 운영 한계에 대한 포괄적인 지식을 입증할 수 있어야 한다. 또한 조종사는 모든 비행 기동들, 그리고 비행 중 비상 절차들을 수행하는데 있어 높은 수준의 숙련도를 보여야 한다. 아래는 조종사가 고고도를 안전하게 운영하기 위해 사용하는 정보들을 다룬다.
Ground Training
1. High-Altitude Flight Environment
a. Airspace and Reduced Vertical Separation Minimum (RVSM) Operations
b. Title 14 Code of Federal Regulations (14 CFR) part 91, section 91.211, Requirements for Use of Supplemental Oxygen
2. Weather
a. Atmosphere
b. Winds and clear air turbulence
c. Icing
3. Flight Planning and Navigation
a. Flight planning
b. Weather charts
c. Navigation
d. Navigation aids (NAVAIDs)
e. High Altitude Redesign (HAR)
f. RNAV/Required Navigation Performance (RNP) and Receiver Autonomous Integrity Monitoring (RAIM) prediction
4. Physiological Training
a. Respiration
b. Hypoxia
c. Effects of prolonged oxygen use
d. Decompression sickness
e. Vision
f. Altitude chamber (optional)
5. High-Altitude Systems and Components
a. Oxygen and oxygen equipment
b. Pressurization systems
c. High-altitude components
6. Aerodynamics and Performance Factors
a. Acceleration and deceleration
b. Gravity (G)-forces
c. Mach Tuck and Mach Critical (turbojet airplanes)
d. Swept-wing concept
7. Emergencies
a. Decompression
b. Donning of oxygen masks
c. Failure of oxygen mask or complete loss of oxygen supply/system
d. In-flight fire
e. Flight into severe turbulence or thunderstorms
f. Compressor stalls
Flight Training
1. Preflight Briefing
2. Preflight Planning
a. Weather briefing and considerations
b. Course plotting
c. Airplane Flight Manual (AFM)
d. Flight plan
3. Preflight Inspection
a. Functional test of oxygen system, including the verification of supply and pressure, regulator operation, oxygen flow, mask fit, and pilot and air traffic control (ATC) communication using mask microphones
4. Engine Start Procedures, Run-up, Takeoff, and Initial Climb
5. Climb to High Altitude and Normal Cruise Operations While Operating Above 25,000 Feet Mean Sea Level (MSL)
6. Emergencies
a. Simulated rapid decompression, including the immediate donning of oxygen masks
high-performance airplane이란200 마력을 초과하는 출력을 낼 수 있는 엔진을 갖춘 비행기라 정의된다(14 CFR part 61, section 61.31(f)(1)). complex airplane이란retractable landing gear, flaps, 그리고 controllable pitch propeller를 갖춘 비행기를 의미하며 여기에는 엔진 및 프로펠러를 제어하기 위해 디지털 컴퓨터 및 연관 부속품으로 구성된 엔진 제어 시스템(예를 들어 FADEC - full authority digital engine control)을 갖춘 비행기도 포함된다(14 CFR part 61, section 61.1).
complex airplane이나high-performance airplane으로 전환하는 것은 많은 조종사들에게 힘든 일이 될 수 있다. 성능과 복잡성이 증가하므로 추가적인 계획, 판단, 그리고 조종 기술이 필요하다. 따라서 이러한 형식의 비행기로 전환하는 것은 체계적인 교육 과정을 통해 이루어져야 한다.
비행기는 광범위한 대기속도를 비행하도록 설계될 수 있다. 고속 비행은 작은 날개 면적과 적당한 camber를 가진 에어포일을 필요로 한다. 반면 저속 비행은 큰 날개 면적과 큰 camber를 가진 에어포일을 필요로 한다. [그림 12-1] 항공기 설계자들은 순항을 위한 고속 비행과 착륙을 위한 저속 비행을 모두 제공하기 위해 여러 가지 타협점을 찾아야 했다. flaps는 에어포일의 camber와 날개 면적을 증가시켜서 저속 비행을 향상시키기 위한 일반적인 설계 방법이다. [그림 12-2]
에어포일은 서로 다른 두 가지 camber를 동시에 가질 수 없다. 따라서 설계자들과 엔지니어들은 두 가지 방법 중 하나를 통해 원하는 성능 특성을 제공한다: (1)에어포일을 절충해서 설계한다 (2) 저속 비행을 위해 에어포일 캠버를 증가시키는 장치를 cruise airfoil에 결합한다. camber란 에어포일 상부 표면과 하부 표면의 비대칭 정도를 의미한다. 에어포일의 camber를 변화시키는 한 가지 방법은 trailing-edge flaps를 추가하는 것이다. 엔지니어들은 이러한 장치를 high-lift system이라 부른다.
Function of Flaps
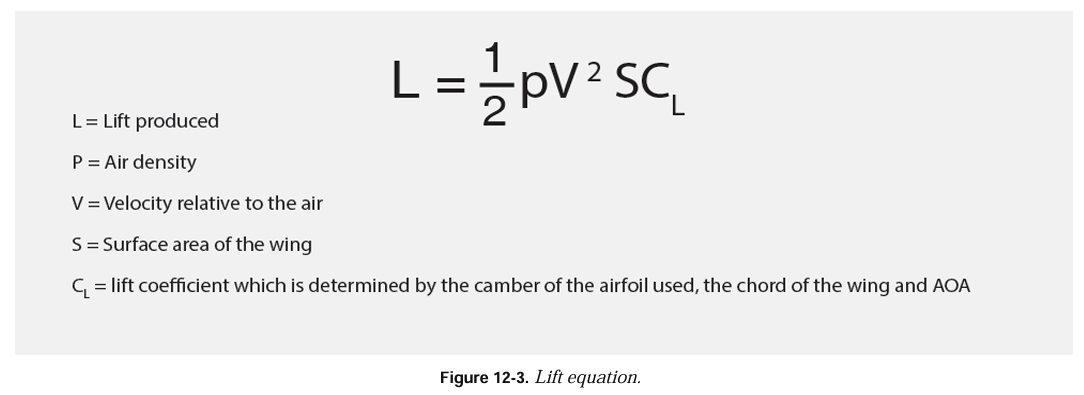
flaps는 주로 에어포일 캠버를 변화시켜서 날개의 양력 계수를 증가시킨다. 일부 flaps는 날개의 표면적도 증가시킨다. flaps가 연장된다 해서 임계 받음각이 증가하지는 않는다. 오히려 경우에 따라 flaps가 임계 받음각을 감소시킨다. 날개의 조종면(예를 들어 ailerons와 flaps)이 편향되면 양력과 항력이 모두 변화한다. aileron이 편향되면 비대칭 양력이 발생하며 이로 인해비행기 세로축을 중심으로 rolling moment가 발생한다. wing flaps는 세로축을 중심으로 서로 대칭으로 작용하므로 rolling moment가 발생하지 않는다. 대신 가로축을 중심으로 pitching moment가 발생하며 양력과 항력이 증가한다. 양력은 여러 변수들(공기 밀도, 속도, 표면적, 그리고 양력 계수)의 함수이다. flaps는 에어포일의 양력 계수를 증가시키므로 양력이 증가한다. [그림 12-3]
(L = 양력, P = 공기 밀도, V = 대기속도, S = 날개 면적, CL = 양력계수. 양력계수는 에어포일의 캠버, 날개의 시위선, 그리고 받음각에 의해 결정됨.)
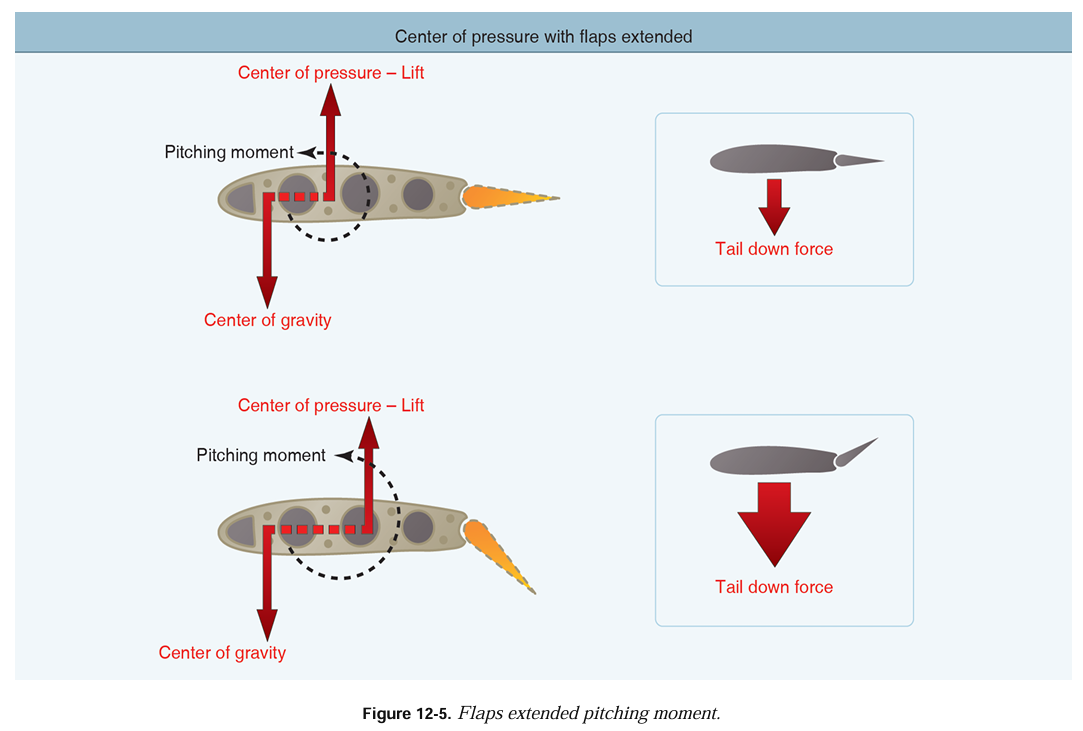
flaps가 연장되면 nose-up이 발생하거나, nose-down이 발생하거나, 혹은 약간의 pitch 변화가 발생할 수 있다. pitching moment는 날개 양력 중심이 뒤로 이동해서 발생한다. 허나 pitch behavior는 여러 변수들(flap 형식, 날개 위치, downwash 특성, 그리고 수평 꼬리날개 위치)에 의해 달라진다. 따라서 pitch behavior는 특정 비행기의 설계 특성에 따라 달라진다.
15도까지 flap이 연장되면 주로 양력이 생성되며 항력은 최소한으로 증가한다. 15도 너머로 flap이 연장되면 항력이 크게 증가한다. flap이 연장될 때 발생하는 항력은 유해 항력이며 따라서 속도의 제곱에 비례한다. 또한 대부분의 고익기에서 15도 너머로 flap이 연장되면 상당한 nose-up pitching moment가 발생한다. 왜냐하면 downwash가 수평 꼬리날개의 공기 흐름을 변화시키기 때문이다.
Flap Effectiveness
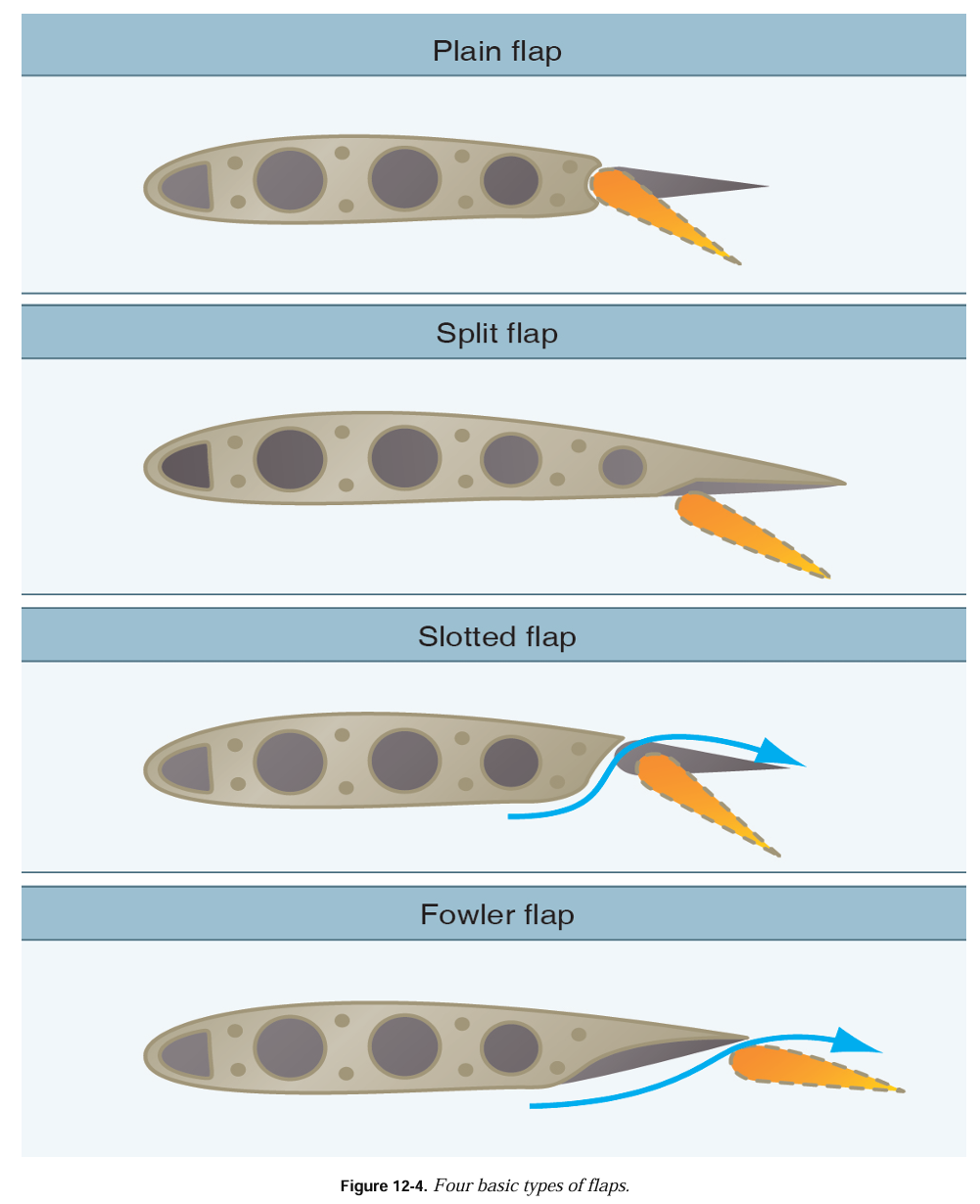
flap의 효율성은 여러 요인에 의해 달라지는데 그 중크기와 형식이 가장 큰 요인다. 이 장의 목적을 위해 trailing edge flaps는 네 가지 기본 유형으로 분류된다: plain(hinge), split, slotted, 그리고 fowler. [그림 12-4]
plain(hinge) flap은 날개에서 경첩이 달린 부분이다. plain flap의 구조와 기능은 이 외의 조종면들(ailerons, rudder, 그리고 elevator)과 유사하다. split flap은 더 복잡하다. split flap은 날개의 아랫부분에 있다. flap이 연장되어도 날개 뒷전의 공기 흐름이 흐트러지지 않는다. split flap은hinge flap보다 더 효율적이다. 왜냐하면 양력은 더 많고 pitching moment는 더 적기 때문이다(허나 항력 또한 많다). 착륙에서는 split flaps가 유용하다. 허나 이륙에서는 partially deflected hinge flaps가 유용하다. split flap은 약간만 연장되어도 항력이 상당한반면 hinge flap은 그렇지 않다. 왜냐하면 공기 흐름이 flap에 부착된 상태가 유지되기 때문이다.
slotted flap에서는 날개와 flap 사이에 틈이 있다. slot을 통해 날개 아랫면의 고압 기류가 윗면의 저압 기류에 에너지를 공급해서 흐름 분리가 지연된다. slotted flap은 hinge flap보다 더 많은 양력을 생성하지만split flap보다는 적은 양력을 생성한다. 허나 slotted flap은 높은 양항비 덕분에 이륙 및 상승 성능이 좋다. slotted flap을 조금 연장하면 hinge flap보다 더 많은 항력을 생성하지만split flap보다는 적은 항력을 생성한다. 이 덕분에slotted flap은 이륙에 사용될 수 있다.
fowler flap은 날개 면적을 증가시키기 위해 아래쪽 및 뒤쪽으로 연장된다. 이 flap에는 여러 개의 slot이 있어서 trailing-edge systems 중 가장 복잡하다. 대신 이 시스템은 최대 양력 계수를 제공한다. flap을 조금 연장하였을 때의 항력 특성은 slotted flap과 매우 유사하다. fowler flaps는 대형 비행기에서 가장 일반적으로 사용된다. 왜냐하면 fowler flaps는 구조적으로 복잡하며 slots를 밀봉하는 것이 어렵기 때문이다.
Operational Procedures
수많은 비행기 설계/플랩조합을 모두 논의하는 것은 불가능하다. 조종사는 특정 비행기에 대한 AFM 및/혹은 POH를 참조해야 한다. 일부 AFM/POH는 flaps의 운용 방법에 대해 구체적으로 명시하는 반면 그 외의 AFM/POH는 flaps의 운용 방법을 조종사의 재량에 맡긴다. flaps는 보통 지면 가까이에서 이착륙을 할 때 사용되므로 조종사 판단과 실수 방지가 매우 중요하다.
AFM/POH에 제시된 권장사항은 비행기와 플랩 설계를 기초로 한다. 따라서 조종사는 제조업체의 권장사항을 flaps의 공기역학적 영향과 관련시켜야 한다. 이를 위해서는 flap에 대한 공기역학과 기하학에 대한 기본 배경 지식이 필요하다. 이러한 정보를 통해 활주로 조건, 접근 조건, 그리고 바람 조건을 바탕으로 flap을 연장할 각도와 flap을 연장할 시기를 결정할 수 있다.
flap을 연장할 시기와flap을 연장할 각도는 서로 연관되어 있다. landing pattern의 특정 지점에서 flap이 많이 변경되면 양력이 크게 변화하며이때 대기속도와 하강 각도를 유지하기 위해 상당한 pitch 변화와 출력 변화가 필요할 수 있다. 따라서 landing pattern에 있는 동안 flaps를 점진적으로 연장하는 것이 유리하다. downwind, base leg, 그리고 final approach에서 flaps를 점진적으로 연장하면 pitch 조정과 출력 조정이 작아지며 stabilized approach가 수행되도록 돕는다.
normal landing, soft-field landing, 혹은 short-field landing은 착륙 시 최소한의 속도를 필요로 한다. 허나 short-field obstacle approach는 최소 속도와 깊은 접근 각도를 필요로 한다. flap이 연장되면 상당한 수준의 항력이 발생한다(특히 30도 너머로 flap이 연장된 경우). 항력은 높은 침하율을 생성할 수 있으며조종사는 이를 출력으로 제어해야 한다. steep approach나short-field approach 도중 flaps에 의해 생성되는 항력을 상쇄하기 위해 출력을 사용하였다면 landing flare가 매우 중요해진다. 만약 출력을 너무 일찍 줄이면 hard landing, 비행기 손상, 혹은 제어 상실로 이어질 수 있다. 출력을 너무 늦게 줄인 경우에는 floating이 발생할 수 있다.
flap을 연장할 각도를 결정할 때 측풍 성분도 고려해야 한다. 연장된 flap은 바람이 작용할 수 있는 표면적을 제공한다. 측풍 상황에서 flaps가 연장되면 풍상쪽 날개가 풍하쪽 날개보다 더 많은 영향을 받는다. 이 영향은 crabbed approach를 통해 약간 감소한다. 왜냐하면 비행기가 바람과 거의 일직선이 되기 때문이다. wing-low approach를 사용하는 경우에는 풍상쪽으로 낮아진 날개가 풍상쪽 flap을 불완전하게 차단한다. 이러한 상황이 날개 상반각과 결합되면 가로 방향 제어가 더 어려워진다. flap이 최대로 연장될수록, 그리고 바람이 활주로로부터 수직일수록 가로 방향 제어가 더 어려워진다.
flaps가 연장된 상태에서 비행기가 지면에 가까워질수록 날개에 대한 측풍의 영향이 더 뚜렷해진다. 날개, 플랩, 그리고 비행기의 풍상쪽 지면은 측풍 공기가 채워지는 “용기(container)”를 형성한다. flap은 main landing gear의 뒤에 위치하므로 flap에 바람이 부딪히면 비행기가 바람을 향해 yaw 하는 경향과 풍상쪽 날개가 높아지는 경향이 발생한다. 날개가 높아지면 타이어 힘이 줄어들어서 바람을 향해 yaw 하려는 경향이 더 커진다. 활주로와의 정렬을 유지하기 위해서는 올바른 조종간 위치(ailerons into the wind)가 필수적이다. 비행기 제어를 유지하기 위해 착륙 후 즉시 flaps를 올려야 할 수도 있다.
flap을 연장할 각도와flap을 연장할 위치를 결정할 때 복행(go-around)도 고려해야 한다. flap을 연장하면 nose-down pitching moment가 발생하므로 이를 상쇄하기 위해 trim이 사용된다. 복행 시 최대 출력을 적용하면 날개 위의 공기 흐름이 증가한다. 이는 추가적인 양력을 발생시켜서 pitch를 크게 변화시킨다. 앞서 설정해둔 trim 때문에 flap을 올린다 해서pitch-up 경향이 완전히 줄어들지는 않는다. 항력을 줄이기 위해 flaps를 빨리 올리는 것이 바람직하긴 하지만 대신 조종사는 trim으로 인한 급격한 조종간 압력 변화와 조종면으로 향하는 공기흐름 증가에 대비해야 한다. [그림 12-5]
복행 도중 조종사는 pitch와 airspeed를 주의 깊게 모니터링 해야 하며flap이 연장된 각도와 날개에 대한 수평 꼬리날개 설계 구성이 복행 특성에 영향을 미칠 것을 예상해야 한다. 조종사는 pitch와 airspeed를 주의 깊게 모니터링 해야 하고, 고도 손실을 최소화하기 위해 flap retraction을 제어해야 하며, 삼타일치를 위해 rudder를 사용해야 한다. 이러한 요소들 때문에 매 착륙마다 landing pattern의 동일한 지점에서 동일한 각도만큼 flap을 연장하는 것이 좋다. 장주 패턴 내에서 flaps를 일관되게 사용하면 landing pattern 내 비행기 위치를 기준으로 미리 계획된 · 익숙한 복행을 수행할 수 있다.
착륙 시 사용할 flap 각도를 결정하는 공식은 없다. 왜냐하면 착륙에는 변수들이 수반되는데 이 변수들은 서로 영향을 미치기 때문이다. 특정 비행기의 AFM/POH에는 몇몇 착륙 상황에 대한 제조업체의 권장 사항이 포함되어 있다. 반면 이륙에 관한 AFM/POH의 flap 정보는 더 구체적이다. 제조업체의 요구 사항은 특정 flap 설계로부터 생성된 상승 성능을 기반으로 한다. 이륙 수행 시 어떤 경우에도 AFM/POH에서 명시하는 flap 설정을 초과해서는 안 된다.
fixed-pitch propellers는 하나의 특정 rpm과 하나의 대기속도에서 최고의 효율을 발휘하도록 설계되었다. fixed-pitch propeller는 좁은 범위의 대기속도에서 적절한 성능을 제공한다. 허나 이 범위를 벗어난 경우에는 fixed-pitch propeller의 효율성이 상당히 떨어진다. 광범위한 운영을 통해 프로펠러 효율성을 향상시키기 위해선 프로펠러 블레이드 각을 제어할 수 있어야 한다.
Constant-Speed Propeller
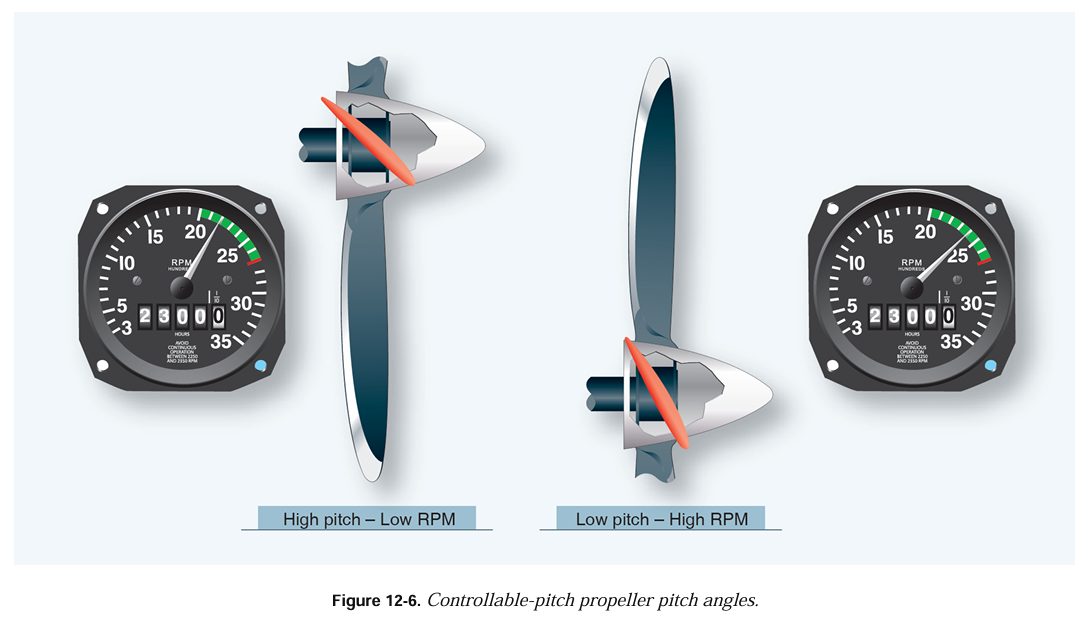
constant-speed propeller(정속 프로펠러)는 대부분의 비행 조건에서 최대 효율을 제공하기 위해 프로펠러 각을 조정한다. 조종사는 propeller governor에 연결된 propeller control을 통해 엔진 rpm을 간접적으로 제어한다. 최대 이륙 출력을 적용할 때에는propeller control을low pitch/high rpm position으로 전진하고 throttle을maximum allowable manifold pressure position로 전진한다. [그림 12-6] 상승이나 순항을 위해 출력을 감소시켜야 한다면 먼저 throttle로 manifold pressure를 적절한 값으로 감소시킨 다음propeller control을 high pitch/low rpm position으로 당겨서 엔진 rpm을 감소시킨다. 조종사는 tachometer를 통해 rpm을 정확하게 설정할 수 있다.
비행기 엔진이 constant governed speed로 작동하고 있다면 엔진이 프로펠러축에 가하는 토크(힘)와 프로펠러 블레이드의 공기 저항이 동일하다. 조종사가 propeller control을 통해 propeller blade pitch를 조정하면 프로펠러의 공기 저항이 증가하거나 감소해서 엔진 rpm이 변경된다. 예를 들어 propeller control을 당기면 프로펠러 블레이드가 high pitch로 이동한다. 이는 프로펠러에 가해지는 공기 저항을 증가시켜서 엔진 부하를 증가시키며 결국 힘이 평형을 이루기 전까지는 엔진 rpm이 느려진다. propeller control을 전진시키면 propeller blade pitch가 감소한다. 이는 프로펠러에 가해지는 공기 저항을 감소시켜서 엔진 부하를 감소시키며 결국 힘이 평형을 이루기 전까지는 엔진 rpm이 빨라진다. 이 시스템이 작동하기 위해선 constant-speed propeller governor에 엔진 rpm을 감지하는 수단과 프로펠러 받음각을 조절하는 수단이 필요하다. governor는 보통 엔진 크랭크축에 맞물려 있어서 엔진 rpm을 감지할 수 있다. 이 장의 “Blade Angle Control”은 propeller governor가 프로펠러 블레이드 각도를 조정하는 방법에 대해 설명한다.
constant-speed propeller의 blade pitch에 영향을 미치는 또다른 요인이 있다. 비행기가 수평 비행으로부터 상승을 수행하면 엔진이 느려지는 경향을 보인다. governor는 엔진 rpm의 작은 변화에도 민감하게 반응하므로governor는 엔진 rpm이 일정하게 유지될 정도로 blade angle을 줄인다. 비행기가 하강을 수행할 경우 governor는 엔진 rpm이 일정하게 유지될 정도로 blade angle을 높인다. 이를 통해 엔진은 일정한 rpm과 출력 생산량을 유지할 수 있다. 또한 조종사는 manifold pressure가 일정한 상태에서rpm을 변경하거나, rpm이 일정한 상태에서manifold pressure를 변경하거나, 혹은 rpm과 manifold pressure를 둘 다 변경해서 엔진 출력 생산량을 설정할 수도 있다. constant-speed propeller를 사용하면 무한한 수의 출력 설정을 만들 수 있다.
Takeoff, Climb, and Cruise
이륙할 때(비행기 전진 속도가 낮고 최대 출력 및 추력이 필요한 때) constant-speed propeller는 low propeller blade pitch로 설정된다. 저속에서 low blade angle은 상대풍에 대한 블레이드 받음각을 작고 효율적이게 유지한다. [그림 12-7]
또한 low blade pitch는 프로펠러 회전 당 더 적은 양의 공기를 다룰 수 있게 해준다. 이렇게 프로펠러 부하가 가벼우면 엔진이 최대 rpm으로 회전할 수 있으며 최대 엔진 출력을 만들 수 있다. 비록 회전 당 공기의 질량은 적지만 rpm이 높으며 브레이크가 해제되기 전까지는 프로펠러 추력이 극대화 된다. 이륙 활주 초반에 추력이 최대가 되며 비행기가 증속할수록 추력이 감소한다.
블레이드 각이 작기 때문에 부양 후 대기속도가 증가하면 엔진 부하가 가벼워진다. governor는 이를 감지한 다음 블레이드 각을 약간 증가시킨다. 대기속도가 높아질수록 블레이드 각도도 증가해서 상대풍에 대한 블레이드 받음각이 작고 효율적이게 유지된다.
이륙 후 상승을 시작하면 엔진의 출력 생산량을 상승 출력으로 감소시키기 위해 manifold pressure를 줄이고 엔진 rpm을 줄이기 위해 블레이드 각도를 높인다. 더 높은 대기속도(상승)와 더 높은 블레이드 각도로 인해 프로펠러는 낮은 후류 속도에서 더 많은 초(sec)당 공기 량을 다룬다. 이러한 출력 감소는 프로펠러의 효율성 증가로 인해 상쇄된다. 대기속도가 높아질수록 블레이드 각도도 높아져서 블레이드 받음각은 계속 작게 유지된다.
순항고도에서 비행기가 수평비행을 시작하면 대기속도가 증가하며 필요한 출력이 줄어든다. 따라서 조종사는 manifold pressure를 줄이기 위해 throttle을 사용하고 엔진 rpm을 줄이기 위해 propeller control을 사용한다. 더 높은 대기속도와 더 높은 블레이드 각도로 인해 프로펠러는 낮은 후류 속도에서 더 많은 초당 공기량을 다룬다. 정상 순항 속도에서 프로펠러 효율이 최대에 가깝거나 그 이상이다.
Blade Angle Control
프로펠러 RPM을 설정하였다면 propeller governor가 블레이드 각도를 자동으로 조정해서 rpm을 유지한다. 이는 오일 압력을 통해 이루어진다. 보통pitch를 변화시키는데 사용되는 오일 압력은 엔진 윤활 시스템으로부터 직접 공급된다. 엔진오일 압력은 보통 governor에 내장된 펌프를 통해 증가된다. 오일 압력이 높을수록 블레이드의 각도변화가 빨라진다. 프로펠러가 작동할 rpm은 governor head에서 조정된다. 조종사는 조종실의 propeller control을 통해 governor rack의 위치를 변화시켜서 rpm을 변경한다.
일부 constant-speed propellers는 다음을 통해 pitch를 변화시킨다: (1) 블레이드 고유의 centrifugal twisting moment가low pitch를 향하여 블레이드를 평평하게 만든다 (2) 프로펠러 블레이드에 연결된 유압 피스톤에 가해지는 오일 압력이 블레이드를 high pitch로 이동시킨다. 또 다른 유형의 constant-speed propeller는 hub 내의 blade shanks에 부착된 균형추를 사용한다. governor 오일 압력과 blade twisting moment는 블레이드를 low pitch position으로 이동시키며 균형추에 작용하는 원심력은 블레이드를 high pitch position으로 이동시킨다. 첫 번째 constant-speed propellers에서 governor의 오일 압력은 블레이드를 high pitch로 이동시킨다.두 번째 constant-speed propelleres에서는 governor의 오일 압력과 blade twisting moment가 블레이드를 low pitch로 이동시킨다. 따라서 governor의 오일 압력 손실은 각각 다른 영향을 미친다.
Governing Range
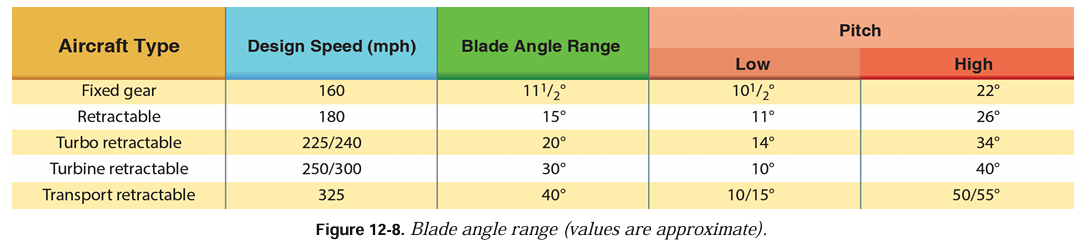
constant-speed propellers의 블레이드 각도 범위는 약 11.5 ~ 50도까지 다양하다. 비행기의 속도가 높을수록 블레이드 각도 범위가 커진다. [그림 12-8]
high blade angle pitch stop과 low blade angle pitch stop 사이의 블레이드 각도 범위가 프로펠러의 governing range를 규정한다. 프로펠러의 블레이드가 governing range 내에서 작동하는 한 엔진 rpm은 일정하게 유지된다. 허나 프로펠러 블레이드가 pitch-stop 한계에 도달하면 엔진 rpm이 대기 속도와 프로펠러 부하의 변화에 따라 증감한다(마치 fixed-pitch propeller처럼). 예를 들어 특정 rpm이 선택된 후 만약 대기 속도가 줄어든다면 프로펠러 블레이드는 특정 rpm을 유지하기 위해 pitch를 줄인다(단, low pitch stops에 도달하기 전까지). low pitch stops에 도달한 이후에도 대기 속도가 계속 줄어든다면 엔진 rpm이 감소한다. 반대로 대기 속도가 증가한다면 프로펠러 블레이드는 특정 rpm을 유지하기 위해 pitch를 높인다(단, high pitch stop에 도달하기 전까지). high pitch stops에 도달한 이후에도 대기 속도가 계속 증가한다면 엔진 rpm이 증가한다.
Constant-Speed Propeller Operation
엔진은 propeller control이 low pitch/high rpm position에 놓인 상태에서 시동된다. 이 position은 프로펠러의 부하를 감소시키며결국 엔진의 시동과 warm-up을 용이하게 만든다. warm-up 도중 propeller blade changing mechanism을 부드럽게full cycle로 작동시킨다. 이를 위해 대략1,600 rpm이 생산될 수 있도록manifold pressure를 설정한 상태에서 propeller control을 high pitch/low rpm position으로 움직이고, rpm이 안정화되도록 기다린 다음, propeller control을 다시 low pitch takeoff position으로 움직인다. 이는 두 가지 이유에서 수행된다: 시스템이 올바르게 작동하는지 확인하기 위해, 그리고 깨끗하고 따뜻한 오일을 propeller governor system에 순환시키기 위해. 엔진이 마지막으로 정지한 후에 오일이 프로펠러 실린더에 갇혀 있었다는 것을 기억하라. 프로펠러 실린더로부터 일정량의 누유가 발생하며 특히 외부 공기 온도가 낮으면 오일이 응고되는 경향이 있다. 따라서 이륙 전에 프로펠러를 작동시키기 않으면 이륙 도중 엔진이 over-speed 할 가능성이 있다.
constant-speed propeller를 갖춘 비행기는 fixed-pitch propeller를 갖춘 비행기보다 이륙 성능이 더 좋다. 왜냐하면 constant-speed propeller를 갖춘 비행기는 움직이지 않는 상태에서 최대 정격 마력(tachometer의 red line)을 생성할 수 있기 때문이다. 반면 fixed-pitch propeller를 갖춘 비행기에서는 대기 속도를 증가시키기고 프로펠러 부하를 줄이기 위해 활주로에서 가속을 해야만rpm과 마력이 최대치까지 꾸준히 증가할 수 있다. constant-speed propeller에서는 최대 출력이 적용되는 즉시 tachometer가 red line으로부터 40 rpm 이내를 나타내야 하며 이륙하는 내내 이 값이 유지되어야 한다. 과도한 manifold pressure는 실린더 연소 압력을 증가시키며이는 엔진 내부에 높은 응력을 발생시킨다. 과도한 압력은 높은 엔진 온도도 생성한다. high manifold pressure와 low rpm이 합쳐지면 심한 detonation이 발생할 수 있다. 이러한 상황을 방지하기 위해선 다음과 같은 출력 변경 순서를 따라야 한다.
∙ 출력을 증가시킬 때는 rpm을 먼저 증가시킨 후에 manifold pressure를 증가시킨다.
∙ 출력을 감소시킬 때는 manifold pressure를 먼저 감소시킨 후에 rpm을 감소시킨다.
순항 출력 세팅을 선택할 때에는 AFM/POH의 cruise power charts를 참조해야 한다. 이 차트에 나열된 rpm/manifold pressure 조합은 기체(airframe) 제조업체와 엔진 제조업체의 엔지니어들로부터 승인되었다. 따라서 power chart에 2,100 rpm and24 inches manifold pressure와 같은 출력 세팅이 있다면 해당 세팅은 사용이 승인된 것이다. constant-speed propeller로는 엔진 over-speed 없이 power descent를 수행할 수 있다. 시스템은 프로펠러 블레이드 각도를 증가시켜서 하강으로 인한 대기속도 증가를 보상한다. 만약 하강이 너무 빠르거나 높은 고도에서 수행되었다면 일정한 rpm을 유지하기엔 블레이드의 maximum blade angle limit이 충분하지 못하다. 이 경우에는 rpm이throttle 변화에 즉각적으로 반응한다.
throttle 세팅이 변화하면 governor가 신속하게 반응한다. 허나 throttle 세팅이 갑자기 크게 증가하면 블레이드가 출력 증가를 흡수하도록 조정되기 전까진 엔진이 순간적으로 over-speed 하게 된다. 접근 도중 최대 출력이 필요한 비상 상황이 발생하여 throttle을 갑자기 전진하면 엔진 over-speed가 순간적으로 발생한다.
constant speed propeller와 관련하여 기억해야 할 몇 가지 중요한 사항은 다음과 같다:
∙ tachometer의 red line은 maximum allowable rpm을, 그리고 엔진의 정격 마력을 얻는데 필요한 rpm을 나타낸다.
∙ 이륙 도중 throttle이 빠르게 전진되면 순간적으로 프로펠러 overspeed가 발생할 수 있다. 정격 rpm의 10%를 초과하지 않는 rpm이 3초 이하로 발생한다면 심각한 문제는 아니다.
∙ tachometer의 green arc는 정상 작동 범위를 나타낸다. 이 범위에서 출력이 발생할 때에는 엔진이 프로펠러를 구동한다. 허나 green arc 미만에서는 보통 windmilling propeller가 엔진을 구동한다. green arc 미만에서 장시간 비행하면 엔진이 손상될 수 있다. 표고가 낮은 공항에서 이륙할 때에는 manifold pressure가 rpm을 초과할 수 있다. 대부분의 경우 이는 정상이긴 하지만 조종사는 항상 AFM/POH의 limitations를 참조해야 한다.
∙ over-boosting 및/혹은 over-speeding을 방지하기 위해 항상 출력 변화를 부드럽고 천천히 수행해야 한다.
turbocharged engine을 통해 조종사는 높은 고도에서도 충분한 순항 출력을 유지할 수 있다. 높은 고도에서는 항력이 적어서진대기속도가 빠르며 연료 절약 덕분에 항속거리가 증가한다. 또한 turbocharged engine의 융통성 덕분에 이는 터빈 엔진과는 달리 저고도에서도 연료 소모 증가 없이 비행할 수 있다. standard powerplant에 장착된 turbocharger는 엔진의 마력을 사용하지 않는다. turbocharger는 기계적으로 간단하며일부 모델은 객실을 가압할 수도 있다.
turbocharger는 엔진으로 공급되는 공기의 압력과 밀도를 높이는 exhaust-driven device이다. 이는 두 개의 개별 구성 요소로 구성된다: compressor와turbine(이 둘은 하나의 축으로 연결됨). 고고도 운영을 위해 compressor는 엔진에 가압 공기를 공급한다. compressor와 compressor housing은 induction air manifold와 ambient air intake의 사이에 있다. turbine과 turbine housing은 exhaust system의 일부로이는 배기가스를 통해 compressor를 구동한다. [그림 12-9]
turbine은 특정 엔진에 대한 최대 허용치를 초과하는 manifold pressure를 생성할 수 있다. maximum allowable manifold pressure를 초과하지 않기 위해 bypass나waste gate가 사용되며 이는 일부 배기가스를 바깥으로 우회시킨다.
waste gate의 position은 turbine의 산출량을 조절한다(즉, 엔진이 사용할 수 있는 압축 공기를 조절한다). waste gate가 닫히면 모든 배기가스가 turbine을 구동한다. waste gate가 열리면 배기가스의 일부가 exhaust bypass를 통해 turbine을 우회하며 exhaust pipe를 통해 바깥으로 배출된다.
waste gate actuator는 엔진 오일 압력에 의해 작동하는 spring-loaded piston이다. actuator는 waste gate의position을 조정하며 이는 waste gate와 기계적으로 연결된다.
pressure controller는 turbocharger system의 제어 센터이다. pressure controller는 throttle이라는 하나의 제어 장치를 통해 turbocharging을 단순하게 만든다. 원하는 manifold pressure가 설정되었다면 사실상 고도 변화에 따른 throttle 조정이 필요하지 않다. controller는 다양한 고도에 대한 compressor 배출 조건을 감지한 다음waste gate actuator로 공급되는 오일 압력을 제어해서 waste gate를 조정한다. 그 결과로turbocharger는 throttle setting이 요구하는manifold pressure를 유지한다.
Ground Boosting Versus Altitude Turbocharging
altitude turbocharging(때때로 “normalizing”이라 불림)은 maximum allowable sea level manifold pressure(보통29 ~ 30"Hg)를 특정 고도까지 유지하는 turbocharger를 통해 이루어진다. 이 특정 고도는 비행기 제조업체에서 지정하며 비행기의 critical altitude라 불린다. critical altitude 너머에서는 고도에 따라 manifold pressure가 감소한다. 반면 ground boosting은 비행 도중 29인치를 초과하는 manifold pressure가 사용되는turbocharging이 적용된 것이다. ground boosting을 사용하는 비행기에서는 takeoff manifold pressures가 45"Hg까지 올라갈 수 있다.
sea-level manifold pressure setting과 maximum rpm이 critical altitude까지 유지될 수 있다 해도 엔진이 sea-level power를 만들어내진 못할 수 있다. 왜냐하면 유입 공기는 압축에 의해 가열되기 때문에 밀도가 낮아지며 이는 엔진 출력을 저하시키기 때문이다. 특정 고도에서 동등한 마력 출력을 유지하기 위해선 turbocharging에 의해 유입 공기가 압축 및 가열되지 않을 때보다 manifold pressure가 다소 높아야 한다. 만약 시스템에 automatic density controller(엔진으로 향하는 공기 밀도를 일정하게 유지하기 위해 자동으로 waste gate를 조절하는 장치)가 내장되어 있다면 해수면 마력 출력과 거의 동일한 마력 출력을 얻을 수 있다.
Operating Characteristics
turbocharged engine에서는 출력 조절이 부드러워야 한다. 과도하거나 갑작스러운 throttle 조작은 over-boost 가능성을 높인다. 출력을 변경할 때에는 engine indications를 주의 깊게 모니터링 해야 한다.
waste gate가 열려 있을 때에는 엔진 rpm에 따른 manifold pressure 변화가 자연 흡기 엔진과 동일하게 나타난다. 즉, rpm이 증가하면 manifold pressure가 약간 감소하고엔진 rpm이 감소하면 manifold pressure가 약간 증가한다. 허나 waste gate가 닫혀 있을 때에는 엔진 rpm에 따른 manifold pressure 변화가 자연 흡기 엔진과 반대로 나타난다. 엔진 rpm이 증가하면 manifold pressure가 증가하고 엔진 rpm이 감소하면 manifold pressure가 감소한다.
critical altitude 너머(waste gate가 닫힌 고도)에서 대기속도가 변화하면 그에 상응하는 manifold pressure 변화가 발생한다. 왜냐하면 대기속도 증가로 인해 높아진 램 공기 압력이compressor에 의해 확대되어서 manifold pressure가 높아지기 때문이다. manifold pressure가 높아지면 엔진을 통과하는 공기의 양이 많아져서 turbine 속도가 높아지며이는 결국 manifold pressure를 더 증가시킨다.
높은 고도에서는 aviation gasoline이 실린더에 도달하기 전에 기화되는 경향을 보인다. fuel tank와 engine-driven fuel pump 사이에서 이러한 현상이 발생한다면 탱크에 auxiliary positive pressure pump가 필요할 수 있다. engine-driven pumps는 연료를 끌어당기기 때문에 vapor lock이 발생하기 쉽다. boost pump는 양압을 제공하며이는 연료를 밀어서 기화되려는 경향을 줄여준다.
Heat Management
turbocharged engines는 압력과 온도의 지속적인 모니터링을 통해 신중하게 작동되어야 한다. 특히 중요한 두 가지 온도는 다음과 같다: TIT(turbine inlet temperature)나EGT(exhaust gas temperature), 그리고 cylinder head temperature. TIT limit이나EGT limit은 turbocharger의 뜨거운 부분에 있는 부품들을 보호하기 위해 설정된다. 반면 cylinder head temperature limit은 엔진의 내부 부품들을 보호하기 위해 설정된다.
흡입 공기의 압축열로 인해 turbocharged engine은 nonturbocharged engine보다 더 높은 온도에서 작동한다. turbocharged engines는 높은 고도에서 운영되므로 냉각 효율이 떨어진다. 높은 고도에서는 공기 밀도가 낮으므로 냉각 효율이 떨어진다. 또한 공기 밀도가 낮을수록 compressor가 더 많이 작동한다. compressor turbine의 속도는 80,000 ~ 100,000 rpm에 이를 수 있으며 이는 엔진 작동 온도를 증가시킨다. 또한 turbocharged engines는 대부분의 시간 동안 높은 출력 설정에서 작동한다.
높은 열은 피스톤 엔진이 작동하는데 좋지 못하다. 높은 열이 누적되면 piston, ring, 그리고 cylinder head가 고장 날 수 있으며 그 외 부품들에 열응력을 가할 수 있다. 과도한 cylinder head temperature는 detonation으로 이어질 수 있으며 이는 결국 치명적인 엔진 고장으로 이어질 수 있다. turbocharged engines는 특히 열에 민감하다. turbocharger가 작동하기 위한 핵심 요소는 효과적인 열 관리이다.
manifold pressure gauge, tachometer, exhaust gas temperature/turbine inlet temperature gauge, 그리고 cylinder head temperature gauge를 통해 turbocharged engine의 상태를 모니터링 한다. throttle, propeller rpm, mixture, 그리고 cowl flaps를 통해 "heat system"을 관리한다. 특정 순항 출력에서 exhaust gas/TIT에 가장 영향을 미치는 제어 장치는 바로 mixture이다. throttle은 총 연료 흐름을 조절하는 반면 mixture는 연료-공기 비율을 조절한다. 즉,mixture가 온도를 제어한다.
이륙 후 상승 도중 온도 한계가 초과되는 것은 일반적으로 문제가 되지 않는다. 왜냐하면 full rich mixture로 인해 excess fuel이 냉각을 수행하기 때문이다. 순항 도중 보통 power가 감소되고 mixture가 그에 따라 조정된다. 순항 상태에서는 엔진 출력이 더 낮음에도 불구하고 온도가 최대에 도달할 가능성이 높으므로 온도를 면밀히 모니터링 해야 한다. 허나 en route climb 도중 과열이 발생한 경우에는 cowl flaps를 완전히 열고 대기속도를 높여야 할 수 있다.
turbocharged engines는 자연 흡기 엔진보다 더 뜨거우므로 냉각 응력으로 인해 손상되기 더 쉽다. 하강 도중에는 출력을 점진적으로 줄이고 온도를 주의 깊게 모니터링 해야 한다. 하강 도중 landing gear를 연장하면 엔진 출력 설정을 높게 유지함과 동시에 대기 속도를 제어하는데 도움이 될 수 있다. 이는 조종사로 하여금 출력을 조금씩 줄일 수 있게 해주며 결국 엔진이 천천히 냉각되도록 해준다. 또한 낮은 출력 설정에서 엔진 러프니스를 없애기 위해mixture를 약간 lean 해야 할 수 있다.
Turbocharger Failure
turbine exhaust system에서 발생하는 고온/고압으로 인해 turbocharger의 어떠한 오작동도 매우 신중하게 처리되어야 한다. turbocharger에 대한 제조업체의 권장 절차를 따라야 한다. 특히 turbocharger의 오작동 상황에서는 더더욱 그러하다. 만약turbocharger 고장 시 취해야 할 조치가 제조업체의 절차에 충분히 설명되어있지 않다면 다음 절차를 사용한다.
Over-Boost Condition
throttle을 전진하는 도중 manifold pressure가 과도하게 상승하는 경우(waste gate의 결함으로 인해 발생할 수 있음):
∙rpm/mixture 설정에 대한 maximum manifold pressure 미만으로 manifold pressure를 제한하기 위해 즉시throttle을 부드럽게 줄여준다.
∙ 더 이상 over-boost 상태가 발생하지 않는 방식으로 엔진을 작동한다.
Low Manifold Pressure
이 상태는 사소한 고장으로 인해 발생할 수 있지만 심각한 배기 누출이 발생했을 가능성도 있으며이는 잠재적으로 위험한 상황을 만들어낸다.
∙ engine failure procedures에 따라 엔진을 정지한다(단, 엔진을 계속 작동해야만 하는 더 큰 비상 상황이 존재하는 경우 제외).
∙ 엔진을 계속 작동해야 한다면 상황에 따라 요구되는 최저 출력 설정을 사용하고 실현 가능한대로 착륙한다.
landing gear를 올리면 항력이 감소해서 상승 성능이 향상되고 순항 속도가 빨라진다. retractable landing gear systems는 유압이나 전기로(혹은 두 시스템이 조합되어서) 작동할 수 있다. 조종실에는 warning indicators가 배치되며이는 바퀴가 하강 및 고정되었을 때와상승 및 고정되었을 때를, 혹은 중간 위치에 있을 때를 조종사에게 나타낸다. 비상 작동을 위한 시스템 또한 제공된다. retractable landing gear system은 복잡하므로 조종사는 구체적인 작동 절차를 준수해야 하며 작동 제한 사항을 초과해서는 안 된다.
Landing Gear Systems
electrical landing gear retraction system은 기어의 작동을 위해 electrically-driven motor를 사용한다. 이 시스템은 기본적으로 기어를 올리고 내리기 위한 electrically-driven jack이다. 조종실의 스위치가 UP position으로 이동하면 전기 모터가 작동한다. shafts, gears, adapters, actuator screw, 그리고 torque tube로 구성된 시스템을 통해 힘이 drag strut linkages로 전달되며이를 통해 기어가 상승 및 고정된다. gear doors를 열고 닫는 struts 또한 작동한다. 스위치가 DOWN position으로 이동하면 모터가 역전되어서 기어가 하강 및 고정된다. gear motor는 motor's gearbox의 up/down limit switch가 작동하기 전까지 계속하여 움직인다.
hydraulic landing gear retraction system은 기어를 올리고 내리는 연결 장치를 작동시키기 위해 유압유를 사용한다. 조종실의 스위치가 UP position으로 이동하면 유압유가 gear up line으로 향한다. 유압유는 sequenced valves와 downlocks를 통해 gear actuating cylinders로 흐른다. 기어가 하강할 때에도 유사한 과정이 발생한다. 시스템 내의 유압유를 가압하는 펌프는 engine-driven pump이거나electrically-powered pump일 수 있다. 유압유를 가압하기 위해 electrically-powered pump가 사용되는 경우에는 이 시스템을 electrohydraulic system이라 부른다. 또한 이 시스템은 여분의 유압유를 저장하기 위해, 그리고 유압유의 양을 결정할 수단을 제공하기 위해 hydraulic reservoir를 내장한다.
hydraulic pump는 그 동력원에 관계없이 특정 범위 내에서 작동하도록 설계되었다. 센서가 과도한 압력을 감지하면 펌프 내의 relief valve가 열리고 유압이 다시 reservoir로 되돌아온다. 또 다른 유형의 relief valve는 열팽창으로 인해 발생할 수 있는 과도한 압력을 방지한다. 유압은 limit switches에 의해서도 조절된다. 각 gear는 두 개의 limit switches를 가진다: 하나는 extension 전용, 그리고 다른 하나는 retraction 전용. landing gear가 gear cycle을 완료하면 limit switch들이hydraulic pump의 전원을 끊는다. limit switch가 고장난 경우에는 backup pressure relief valve가 작동해서 과도한 압력을 완화한다.
Controls and Position Indicators
landing gear position은 조종실의 스위치에 의해 제어된다. 대부분의 비행기에서 gear switch는 바퀴 모양이며이는 식별을 용이하게 만들고 조종실의 다른 제어 장치들과 구별되게 만든다.
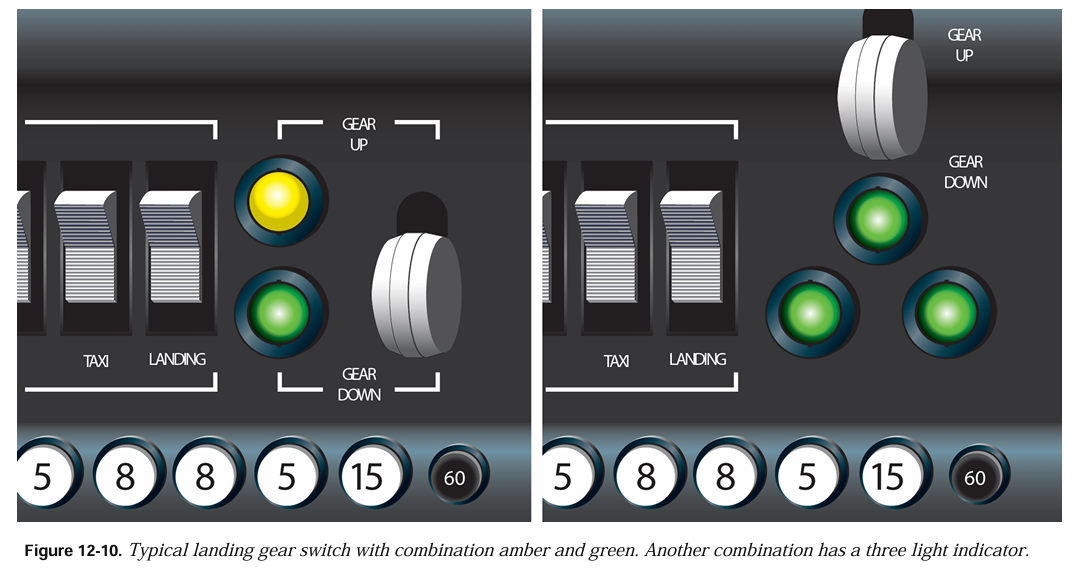
landing gear position indicators는 비행기마다 다르다. 한 가지 유형은 하나의 녹색 표시등(landing gear가 내려진 상태를 지시)과 하나의 노란색 표시등(landing gear가 올려진 상태를 지시)으로 구성된다. [그림 12-10] 세 개의 녹색 표시등으로 구성된 유형도 있으며이는 landing gear가 하강 및 고정되었을 때 켜진다. [그림 12-10] 기어가 변경 중이거나 착륙에 안전하지 않다는 것을 나타내기 위해 붉은색이나 노란색표시등을 갖춘 시스템도 있다. [그림 12-11] 표시등이 “press to test” 기능을 사용하는 경우에는 보통 전구가 교체될 수 있다. integrated electronic displays에서는 별도의 표시등이 없는 대신 화면에 gear position이 표시될 수도 있다.
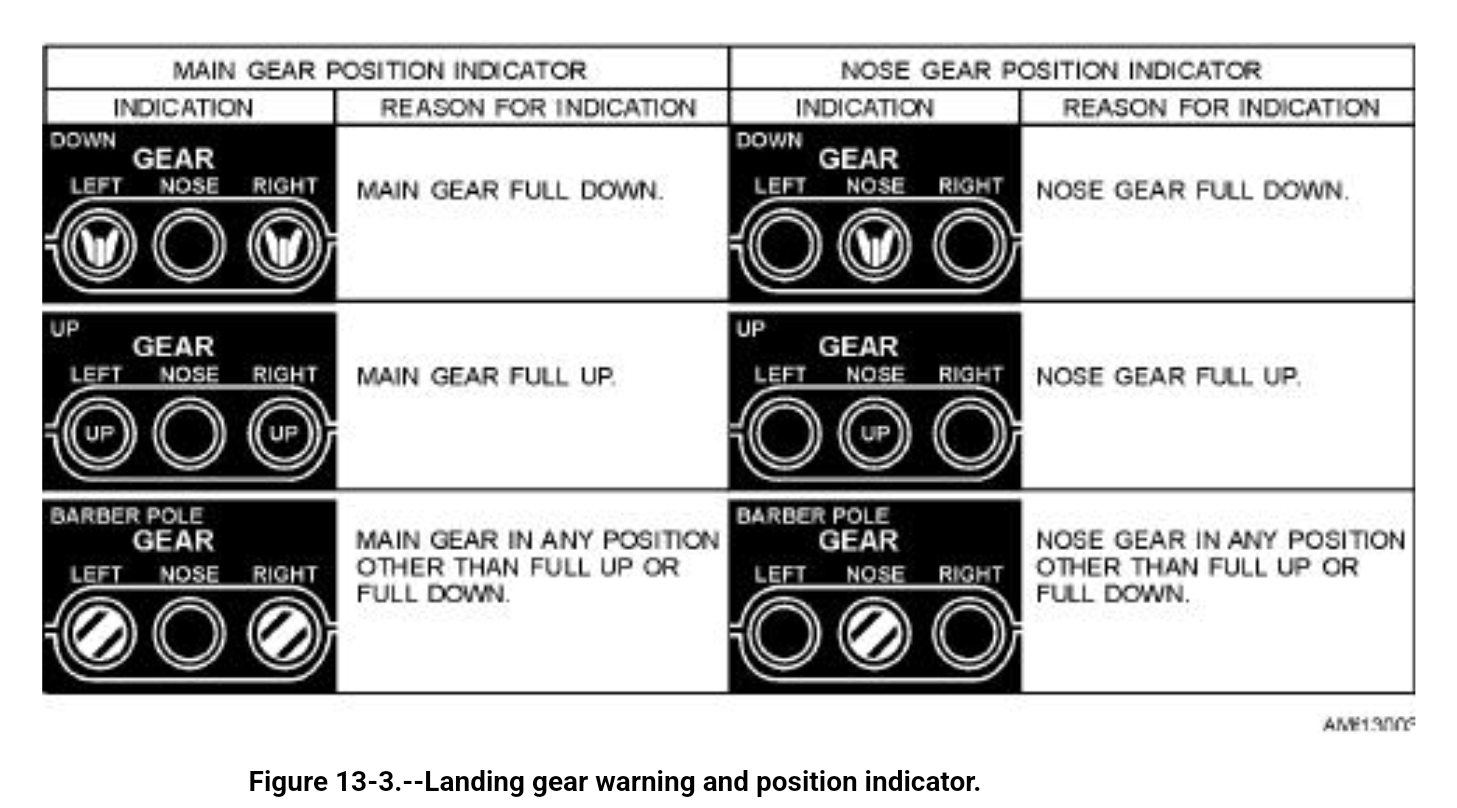
tab-type indicators로 구성된landing gear position indicators도 있으며 이는 “UP” 표시(기어가 상승 및 고정되었음을 나타냄), 빨간색/흰색 대각선 줄무늬 표시(기어가 잠금 해제됨을 나타냄), 그리고 기어의 실루엣 표시(기어가 하강 및 고정되었음을 나타냄)로 이루어져있다.
(출처: TPUB)
Landing Gear Safety Devices
retractable landing gear를 갖춘 대부분의 비행기는 gear warning horn을 가지고 있으며이는 비행기가 착륙 외장 상태에 있으나 landing gear가 내려져있지 않을 때 작동한다. 보통 gear warninghorn은 throttle이나flap position 및/혹은 속도계와 연결되어 있다. 때문에 gear가 올려진 상태에서 비행기가 특정 대기속도, 외장, 혹은 출력 설정보다 낮아지면 경고음이 발생한다.
mechanical downlocks, safety switches, 그리고 ground lock과 같은 장치 덕분에 landing gear가 우발적으로 올라가는 것이 방지될 수 있다. mechanical downlocks는 gear retraction system에 내장된 구성 요소로이는 gear retraction system에 의해 자동으로 작동한다. 비행기가 지상에 있을 때 downlocks가 우발적으로 작동해서 landing gear가 올라가는 것을 방지하기 위해 electrically-operated safety switches가 설치된다.
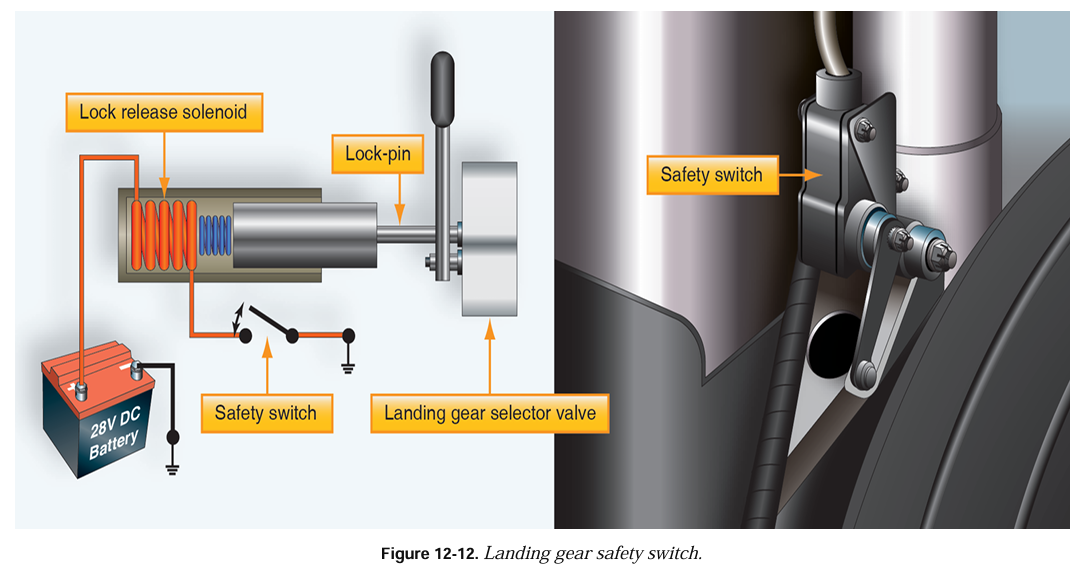
landing gear safety switch(때때로 squat switch라 불림)는 보통 main gear shock strut의 브라켓에 장착된다. [그림 12-12] strut이 비행기의 무게에 의해 압축되면 gear를 올리는 모터나 메커니즘의 전기 회로가 landing gear safety switch에 의해 개방된다. 이 덕분에 gear에 무게가 걸린 상태에서는 조종실의 landing gear switch를 RETRACT position에 놓아도 gear가 연장 상태를 유지하며안전하지 않은 상태를 알리기 위해 warning horn이 울릴 수 있다. 허나 gear에 무게가 걸리지 않게 되면(예를 들어 이륙 시) safety switch가 해제되고 gear가 올라간다.
비행기가 지상에 있을 때 기어가 쓰러지는 것을 방지하기 위해 비행기들은 보통 착탈식 안전장치를 가지고 있다. 이러한 장치를 ground locks라 부른다. 일반적인 유형 중 하나는 pin으로이는 두 개 이상의 landing gear support structure에 뚫린 구멍들이 정렬된 지점에 장착된다. 또 다른 유형은 spring-loaded clip으로이는 두 개 이상의 support structure를 단단히 고정하도록 설계되었다. 모든 유형의 ground locks에는 보통 빨간색 테이프가 영구적으로 부착되어 있으며이는 ground locks의 설치 여부를 쉽게 나타낸다.
(출처: aerospecialties)
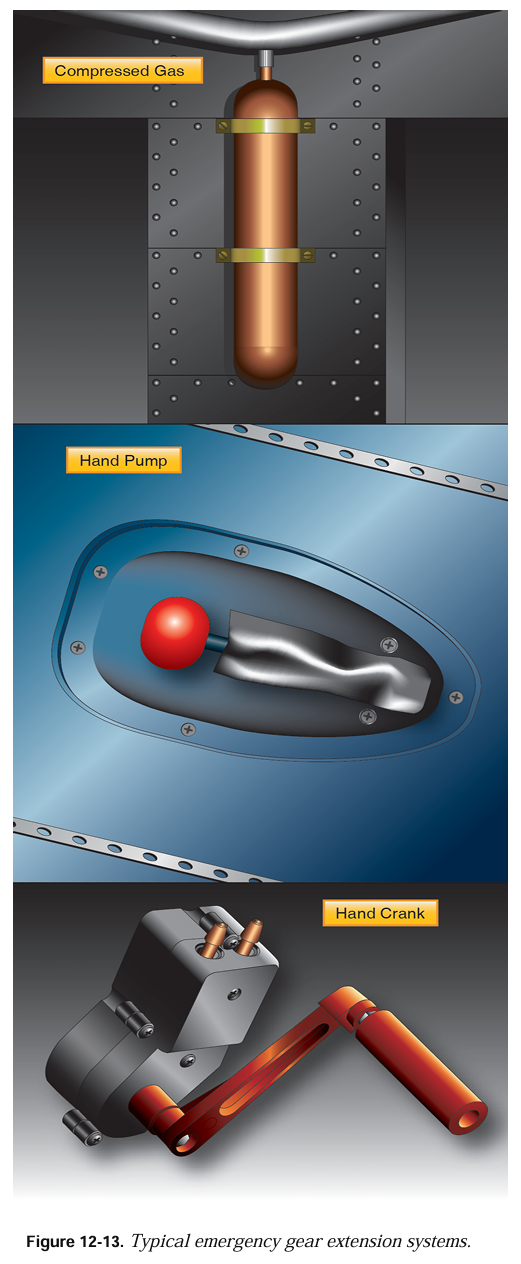
Emergency Gear Extension Systems
main power system에 고장이 발생하면 emergency gear extension system이 landing gear를 내린다. 일부 비행기의 조종실에는 emergency release handle이 있으며이는 기계적 연결 장치를 통해 gear uplocks와 연결되어 있다. handle을 작동하면 uplocks가 해제되며 그 덕분에gear는 자체 무게로 인해 자유 낙하한다. [그림 12-13]
그 외의 비행기에서는 압축 기체(compressed gas)가uplock release cylinders로 향해서uplock이 해제될 수 있다. 일부 비행기에서는 설계로 인해 중력과 공기 부하만으로 landing gear를 연장하는 것이 불가능하다. 이러한 비행기는 비상 상황 시 강제로 gear를 내리기 위한 대비책을 갖추고 있다. emergency gear extension을 위해 몇몇 장치는 유압유나 압축 기체가 압력을 제공하도록 설계되며 그 외의 시스템은 수동 시스템(예를 들어 hand crank)을 사용한다. [그림 12-13] landing gear의 비상 작동을 위한 유압은 비행기 설계에 따라 auxiliary hand pump, accumulator, 혹은 electrically-powered hydraulic pump에서 제공될 수 있다.
Operational Procedures
Preflight
retractable landing gear는 매우 복잡하므로 매 비행 전에 정밀 점검을 해야 한다. 점검은 조종실 내부에서 시작되어야 한다. 먼저 landing gear selector switch가 GEAR DOWN position에 있는지 확인한다. 그런 다음 battery master switch를 키고 landing gear position indicators가 gear down/lock을 표시하는지 확인한다.
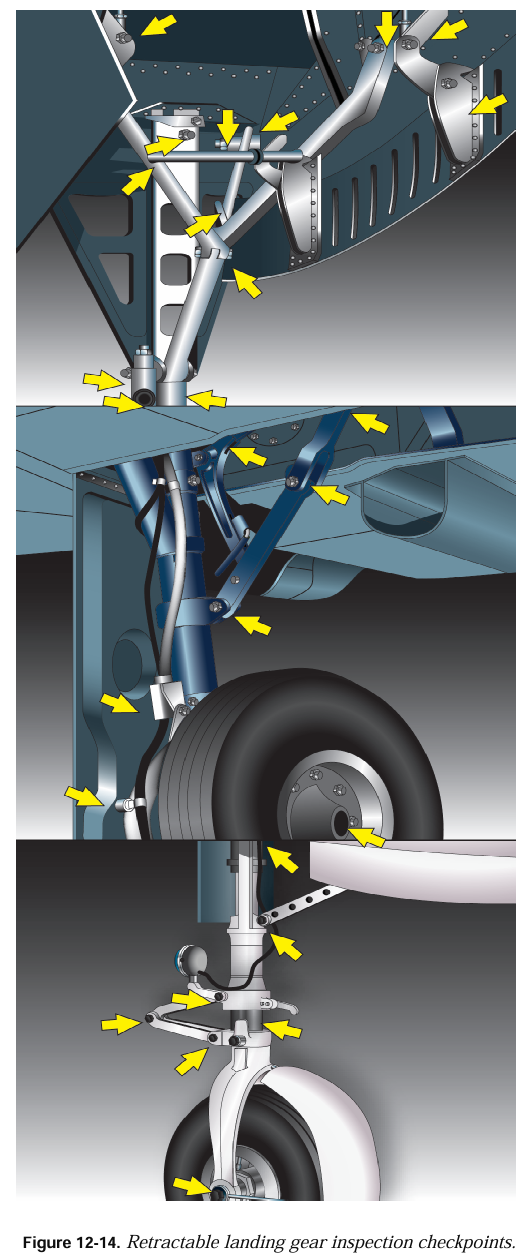
landing gear의 외부 점검은 각 시스템 요소들을 확인하는 것으로 구성된다. [그림 12-14] landing gear, wheel well, 그리고 주변부가 깨끗해야 한다. switches와 valves가 더러우면 safe light가 잘못 표시되거나landing gear가 완전히 하강하기 전에 extension cycle이 중단될 수 있다. wheel wells에는 이물질이 없어야 한다. 왜냐하면 이물질이 gear를 손상시키거나gear의 작동을 방해할 수 있기 때문이다. gear doors가 구부러져 있다면 정상적인 gear 작동에 문제가 있다는 것을 나타낼 수 있다.
shock strut이 적절하게 팽창해 있고 피스톤이 깨끗한지 확인한다. landing gearuplock/downlock 메커니즘의 전반적인 상태를 점검한다. power sources와 retracting mechanisms의 전반적인 상태, 결함, 그리고 고정 상태를 점검한다. 유압라인이 부착된 지점에서 마모와 누유의 흔적을 점검한다. squat switches의 청결 상태와 고정 상태를 점검한다. actuating cylinders, sprockets, universal joints, drive gears, linkages, 그리고 기타 확인 가능한 모든 구성 요소들의 상태와 결함을 점검한다. landing gear가 부착된 비행기 구조물의 변형, 균열, 그리고 전반적인 상태를 점검한다. 모든 bolts/rivets는 손상되지 않은 상태로 단단히 고정되어 있어야 한다.
Takeoff and Climb
이륙 후 landing gear는 보통 다음 고도에 도달한 후에 올려진다: aborted takeoff를 필요로 하는 엔진 고장이나 비상 상황이 발생하였을 때 비행기가 더 이상 활주로에 착륙할 수 없는 고도. 하나 이 절차가 모든 상황에 적용되는 것은 아니다. 다음 사항을 고려해서 landing gear retraction을 계획한다:
∙ 활주로의 길이
∙ climb gradient
∙ 장애물 회피 조건
∙ departure end of the runway 너머의 지형 특징
∙ 해당 비행기의 상승 특성
예를 들어 엔진 고장이 발생하였을 때 어떤 상황에서는 지형의 에너지 흡수 특성을 활용하기 위해 landing gear를 연장한 상태로 off airport forced landing을 수행하는 것이 바람직할 수 있다(Chapter 18, “Emergency Procedures” 참조). 이 경우에는 짧은 활주로에서 이륙한 후 landing gear를 늦게 올리는 것이 타당할 수 있다. 다른 상황에서는 상승 경로의 장애물 때문에 이륙 후 적시에 gear를 올려야 할 수 있다. 또한 일부 비행기의 초기 상승 자세는 남은 활주에 대한 시야를 차단하며이는 남은 활주로에서의 착륙 가능성을 판단하기 어렵게 만든다.
landing gear를 너무 일찌감치 올리지 않는다. 그리고 계기에 positive rate of climb이 표시되기 전까지는 landing gear를 올리지 않는다. 비행기가 positive rate of climb에 도달하지 못하였다면 gear를 올렸을 때 비행기가 활주로에 다시 안착할 가능성이 존재한다. 이는 lift-off가 일찌감치 발생하였을 때 특히나 그러하다. landing gear selector를 조작하기 위해 몸을 앞으로 기울이면 조종간에 의도치 않게 forward pressure를 가할 수 있으며이는 비행기를 하강하게 만든다.
landing gear가 올라가면 대기속도가 증가하며 pitch attitude가 변화할 수 있다. gear가 올라가는데 몇 초가 걸릴 수 있다. gear의 상승 및 고정(그리고 gear의 하강 및 고정)은 비행기 모델마다 서로 다른 특유의 소리와 느낌을 동반한다. gear가 정상적으로 상승하는소리와 느낌에 익숙해지면 gear가 비정상적으로작동하는 것을 쉽게 인지할 수 있다. gear가 비정상적으로 상승한다는 것은 보통 gear의 하강또한 비정상적일 것이라는 명백한 신호이다.
Approach and Landing
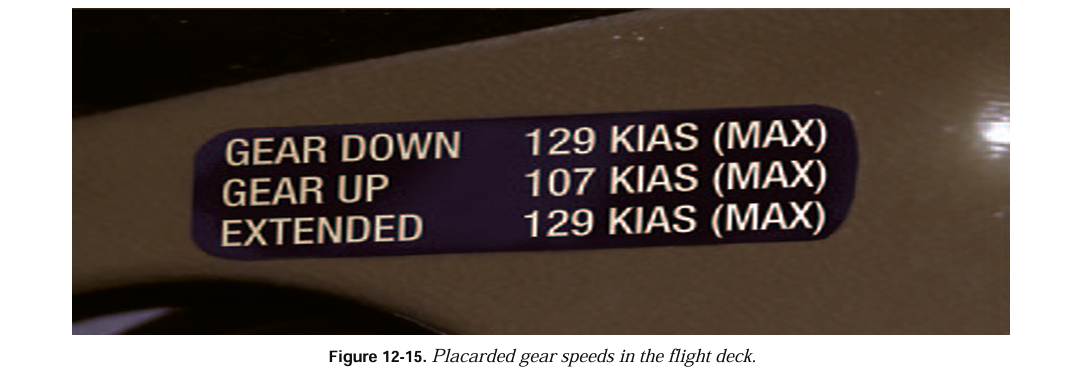
높은 대기속도가 landing gear에 가하는 하중이 구조적 손상을 일으킬 수도 있다.따라서 비행 도중 landing gear를 과도한 응력으로부터 보호하기 위하여 landing gear가 작동하기 위한 제한 속도가 설정되었다.해당 속도는 속도계에 표시되지 않는다. 대신 이는 해당 비행기의 AFM/POH에 게재되며 보통 조종실의 placards에 표시된다. [그림 12-15] VLE(maximum landing extended speed)란landing gear가 연장된 상태에서 비행할 수 있는 최대 속도이다. VLO(maximum landing gear operating speed)란 landing gear가 UP/DOWN cycle을 통해 작동할 수 있는 최대 속도이다.
gear selector switch를 GEAR DOWN position에 놓으면 landing gear가 연장된다. landing gear가 연장되면 대기 속도가 감소하며 pitch attitude가 변화할 수 있다. landing gear가 연장되는 몇 초 동안 비정상적인 소리나 느낌에 주의를 기울인다. 정상적인 소리와 느낌을 통해, 그리고 조종실의 gear position indicators를 통해 landing gear가 연장되었는지 확인한다. 착륙 예정 지점의 반대편 downwind 지점에 도달하기 전에 landing gear를 연장해야 한다(단, traffic pattern altitude로 하강하는데 도움을 얻기 위해 landing gear를 이미 연장해둔 경우 제외). landing gear를 연장할 downwind 내 특정 지점을 포함하는 표준 절차를 수립한다. 해당 절차를 엄격하게 준수하면 의도치 않은 gear up landings이 방지될 수 있다.
retractable landing gear를 갖춘 비행기를 운영하기 위해선 checklist를 신중하고주의 깊게 사용해야 한다. downwind leg에 있을 때 해당 비행기의 before-landing checklist를 수행하는 습관을 들인다. 이는 두 가지 목적을 달성한다: gear를 연장하기 위한 조치가 취해지며착륙 전에 gear down indicators를 다시 확인하도록 경각심을 심어준다.
착륙 활주를 완료하고 활주로를 개방하기 전까지는 어떤 제어 장치도 건드리지 않는다(단, good operating practices가 달리 명시하는 경우 제외). 이러한 기법은 지상에서 landing gear를 실수로 올릴 가능성을 크게 줄여준다. 활주로를 개방하고 나면 after-landing checklist에 집중한다. 이는 올바른 제어 장치를 확실하게 식별할 수 있게 해준다.
retractable gear airplanes로 전환하는 조종사는 몇 가지 실수들을 고려해야 한다. 여기에는 다음을 포함한다:
∙ landing gear를 연장하지 않음.
∙ 의도치 않게landing gear를 올림.
∙ gear를 작동하였으나 gear position은 점검하지 않음.
∙ emergency gear system을 잘못 사용함.
∙ 이륙 도중 gear를 너무 일찌감치 올림.
∙ gear를 너무 늦게 연장함.
이러한 실수들은 complex aircraft로 막 전환한 조종사들과 무사 안일한 조종사들에 의해 발생한다. landing gear와 연관된 사고 가능성을 최소화하기 위해서는:
∙ 적절한 checklist를 사용한다.
∙ 특정 비행기에 대한 landing gear emergency extension procedures를 숙지하고 정기적으로 검토한다.
∙ 특정 비행기에 대한 landing gear warning horn과 warning light systems를 숙지한다. 안전하지 않은 상태가 감지되면 horn system과 warning light system을 대조 확인한다.
∙ 해당하는 경우에는 landing gear warning light displays의 전구 교체 절차를 검토한다. 그래야 전구 상태가 양호한지 확인해서 전구를 올바르게 교체할 수 있다. 만약 전구가 교체 가능하다면 비행 전 점검 도중 비행기의 spare bulb supply에 예비 전구가 있는지 확인한다.
∙ 올바르게 작동하는 landing gear system의 소리와 느낌을 인지 및 숙지해야 한다.
complex airplane이나high-performance airplane으로 전환하는 것은 해당 자격을 갖춘 교관이 관리하는 체계적인 훈련 과정을 통해 이루어져야 한다. 훈련은 ground/flight training syllabus에 따라 수행되어야 한다. [그림 12-16]
전환 교육을 위한 syllabus의 예시는 다음과 같다. 과목의 순서와 중점은 조종사의 능력, 비행기, 그리고 훈련 정황에 따라 변경될 수 있다. 이 교육의 목표는 숙련도 기준을 달성하는 것이다. 이러한 기준은 해당 자격 증명에 대한 Airman Certification Standards에 포함되어 있다.
syllabus에 표시된 교육 시간은 설명을 위한 것이다. 실제 교육 시간은 조종사의 능력을 기준으로 해야 한다. 숙련된 조종사의 경우에는 교육 시간이 최소화될 수 있으나반면 자격 증명 조건을 충족하지 못하거나 최근 비행 경험이 거의 없는 조종사의 경우에는 교육 시간이 늘어날 수 있다.
complex airplane이나 high-performance airplane을 조종하기 위해선 비행의 가장 중요한 단계(이륙과 착륙)에서주의를 더욱 분배해야 한다. 이러한 비행기를 조종하는데 필요한 지식, 판단력, 그리고 조종사 기술이 개발되어야 한다. 시스템, 운영 절차(정상 절차와 비정상 절차), 그리고 운영 한계를 완벽하게 이해하기 위해 충분한 교육을 받는 것이 필수적이다.
이 장은 제트엔진 비행기의 운영에 대한 개요를 포함한다. 이 장에 포함된 정보는 제트 비행기 자격 훈련을 위한 정보를 제공한다. 이 장은 제트엔진 비행기로 전환할 때 발생할 수 있는 주요 차이점에 대한 정보를 제공한다. 제트엔진과 피스톤엔진 비행기의 주요 차이점은 몇 가지 영역에서 다루어진다: 공기역학, 시스템, 그리고 조종사 운영 절차의 차이. 비행기에 대한 특정한 정보를 위해서는 해당 비행기의 AFM을 참조해야 한다.