Straight Climbs and Descents
Climbs
주어진 출력 및 하중 조건에 대해 가장 효율적인 상승률을 제공하는 자세는 하나뿐이다. 이러한 상승 자세를 결정하는 속도 및 상승 출력은 POH/AFM의 performance data에 나와 있다. 상승에 진입하는 기법의 세부 사항은 진입 시 속도, 그리고 상승 형식(정속인지 정률인지)에 따라 달라진다. (heading control과 trim control은 직진수평비행에서 언급한 대로 유지한다.)
Entry
순항 속도에서 정속 상승으로 진입하기 위해서는 미리 선정해둔 상승 속도에 대한 대략적인 nose-high 자세로 miniature aircraft를 들어준다. 자세는 비행기의 형식에 따라 달라진다. 상승 자세를 설정 및 유지하기 위해 가벼운 back-elevator pressure를 가한다. 비행기 감속에 따라 압력이 달라진다. pitch 변화와 동시에 상승 설정으로 출력이 증가될 수 있다(혹은 pitch 변화를 만든 다음 상승 속도에 도달하였을 때 출력을 증가하여도 됨). 수평 비행 상태에서 상승 자세로 원활하게 전환한 경우 VSI는 즉시 상승 경향을 보인 다음, 계속하여 천천히 움직이다가, 안정화된 속도 및 자세에 적절한 rate에서 멈춘다. (상승 진입을 위한 primary and supporting instruments는 그림 7-25에 나타나 있다.)

비행기가 일정한 속도 및 자세에서 안정화 되었다면 속도계는 pitch를 위한 primary가 된다. heading indicator는 여전히 bank를 위한 primary이다. [그림 7-26] 올바른 출력 설정이 유지되는지 확인하기 위해 tachometer, 혹은 manifold pressure gauge를 primary power instrument로서 확인한다. 선택한 출력 설정에 대해 상승 자세가 적합하다면 속도는 원하는 값에서 안정화될 것이다. 만약 속도가 높거나 낮다면 미세한 pitch 수정을 적용한다.
정속 상승에 진입하기 위해 먼저 직진수평비행을 유지한 상태에서 순항속도로부터 상승 속도로 감속한다. 상승 진입은 순항 속도에서 진입하였을 때와 동일하다(단, pitch attitude가 증가함과 동시에 출력을 상승 설정으로 증가시켜야 함). partial panel 기동을 수행할 경우 상승 속도를 먼저 만든 다음 상승으로 진입해야 조작이 쉽고 정확해진다.
정률 상승에 진입하기 위한 기법은 상승 속도에서 정속 상승으로 진입하는 기법과 매우 유사하다. 원하는 상승률에 대한 대략적인 설정으로 출력을 증가한다. 이와 동시에 원하는 상승 속도 및 상승률에 대한 상승 자세를 향하여 miniature aircraft를 들어준다. 출력이 증가할 때 속도계가 pitch control을 위한 primary가 된다(단, 수직 속도가 원하는 값에 도달하기 전까지만). 수직 속도가 안정되었다면 VSI는 pitch control을 위한 primary가 되고 속도계는 power control을 위한 primary가 된다. [그림 7-27]
pitch와 출력의 수정은 통합적으로 이루어져야 한다. 예를 들어 수직 속도는 정확하나 속도가 낮다면 출력을 증가한다. 출력이 증가함에 따라 수직 속도를 일정하게 유지하기 위해서는 miniature aircraft를 약간 낮춰주어야 한다. 만약 수직 속도는 높으나 속도가 낮다면 miniature aircraft를 약간 낮춘 다음 속도 증가를 확인함으로써 출력 변화가 필요한지를 결정한다. [그림 7-28] 대략적인 출력 설정을 숙지한다면 pitch와 출력의 수정이 최소화 될 수 있다.

Leveling off
상승으로부터 수평을 잡은 다음 고도를 유지하기 위해서는 원하는 고도에 도달하기 전에 level off를 시작해야 한다. 이 lead의 양은 상승률, 그리고 조종사 기술에 따라 달라진다. 만약 비행기가 1,000fpm으로 상승하고 있다면 수평 비행으로 전환하는 동안 감소되는 상승률로 비행기는 계속하여 상승한다. 효과적인 방법은 수직 속도의 10%만큼 lead를 잡는 것이다(500fpm의 경우 50ft의 lead, 1,000fpm의 경우 100ft의 lead).
순항 속도로 level off를 하기 위해서는 원하는 속도에 대한 수평 비행 자세를 향해 부드럽고 안정적인 forward-elevator pressure를 가해야 한다. 자세계가 pitch 변화를 나타낼 때 VSI는 천천히 0을 향해 움직이고, 고도계는 점점 천천히 움직이며, 속도계는 가속을 나타낸다. [그림 7-29] 고도계, 자세계, 그리고 VSI가 수평 자세를 나타낼 때 속도가 증가함에 따라 pitch control/torque control이 지속적으로 변화해야 한다. 순항 속도에 가까워지면 출력을 순항 값으로 감소한다. lead의 양은 비행기 가속도에 따라 달라진다.

상승 속도로 level off를 하기 위해서는 해당 속도에 대한 수평 비행 pitch 자세로 기수를 내린다. 이와 동시에 해당 속도에 대한 설정으로 출력을 감소한다. pitch 변화에 비례하여 출력 감소가 이루어진다면 속도가 일정하게 유지될 것이다.
Descents
하강은 출력 감소, 항력 증가, 그리고 기수 낮춤을 통해 다양한 속도 및 자세에서 수행될 수 있다. 속도는 결국 일정한 값에서 안정화될 것이다. 이때 정확한 자세 기준을 제공하는 유일한 계기는 자세계이다. 자세계가 없다면(예를 들어 partial panel 하강 도중) 비행기가 일정한 자세에서 일정한 속도로 감속하기 전까진 속도계, 고도계, 그리고 VSI가 다양한 변화율을 나타낸다. 전환 도중 정확한 제어를 유지하기 위해선 조종간 압력과 trim을 변화시킬 뿐만 아니라 cross-check, 그리고 판독을 정확하게 수행해야 한다.
Entry
하강에 진입하는 다음 방법은 자세계의 유무에 관계없이 효과적이다. 먼저 직진수평비행을 유지한 상태에서 하강 속도(미리 선정해둔 값)로 감속한다. 그 다음 출력을 더 줄여준다(미리 선정해둔 설정). 출력을 조정함과 동시에 기수를 내려주어 일정한 속도를 유지한다. 그리고 조종간 압력을 trim한다.
정속 하강 도중 속도의 변화가 발생하였다면 pitch를 조정해야 한다. 정률 하강의 경우 그 진입 방법은 동일하다. 그러나 VSI가 pitch control을 위한 primary이고(단, 원하는 하강률 근처에서 안정화된 후) 속도계가 power control을 위한 primary이다. pitch와 출력의 수정은 통합적으로 이루어져야 한다. [그림 7-30]

Leveling Off
원하는 고도에 도달하기 전에 하강으로부터의 level off가 시작되어야 한다. lead의 양은 하강률, 그리고 조종 기법에 따라 달라진다. lead가 너무 적다면 원하는 고도를 overshoot 하는 경향이 있다. 하강 속도보다 높은 속도로 level off를 수행하기 위해서는 100 – 150ft의 lead를 사용한다(단, 하강률이 500fpm이라 가정). lead 지점에서 순항 설정으로 출력을 증가한다. [그림 7-31] 증속에 따라 기수가 상승하는 경향이 있으므로 대략 50ft 지점에 도달하기 전까지는 forward elevator pressure를 유지함으로써 하강률을 유지한다. 이후 원하는 속도에 대한 수평 비행 자세에 맞춰 pitch attitude를 부드럽게 조장한다.

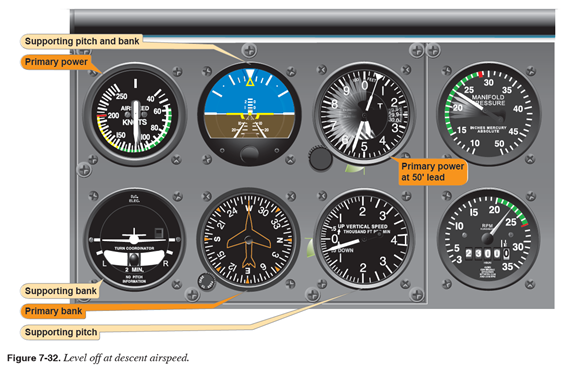
하강 속도를 그대로 유지한 상태로 level off를 수행하기 위해서는 대략 50ft의 lead를 사용한다. 이와 동시에 pitch attitude를 수평 비행 상태로 조정한다. 또한 하강 속도를 일정하게 유지할 수 있는 설정으로 출력을 증가한다. [그림 7-32] 조종간 압력을 trim한 다음 정상적인 직진수평비행 cross-check을 수행한다.
Common Errors in Straight Climbs and Descents
일반적인 오류는 다음과 같은 실수로 인해 발생한다:
1. 상승 진입 시 과도하게 pitch를 제어함. 상승/하강에 사용되는 특정 출력 설정과 관련된 pitch attitude를 학습하기 전까지는 필요 이상의 pitch 조정이 이루어진다. 계기 훈련 도중 습득하기 가장 어려운 습관 중 하나는 결과가 확인되기 전까지 비행 자세를 유지하는 것이다. pitch 변화를 위해 조종간을 과도하게 움직이려는 경향을 극복하라. 또한 미세한 조종간 압력을 부드럽게 적용하는 것, 변화의 결과를 신속하게 cross-check 하는 것, 그리고 원하는 결과가 계기에서 나타나는 동안 조종간 압력을 유지하는 것을 배우라. 작은 pitch 변화는 쉽게 제어, 중지, 그리고 수정될 수 있다. 그러나 큰 변화는 제어하기가 훨씬 어렵다.
2. 속도, 출력, 혹은 자세를 변화하는 도중(혹은 상승/하강 진입 도중) cross-check 속도를 변화하지 않은 경우.
3. 새로운 pitch attitude를 유지하지 못한 경우. 예를 들어 정확한 상승 자세로 기수를 높인 후 속도가 감소함에 따라 pitch attitude를 더 들었거나, 혹은 낮추었다. 조종간 압력은 속도의 변화에 따라 달라지므로 cross-check이 반드시 증가해야 한다. 또한 압력이 다시 조정되어야 한다.
4. 압력을 trim하지 못함. 비행기가 trim 되지 못하면 조종간 압력의 변화가 공기역학적 변화에 의해 발생한 건지, 혹은 조종사 자신의 움직임에 의해 발생한 건지를 결정하는데 어려움이 생긴다.
5. 올바른 출력 설정을 사용하지 못함.
6. pitch, 혹은 출력 조정을 수행하기 전에 속도계와 수직 속도계를 둘 다 cross-check 하지 못함.
7. pitch와 출력을 통합적으로 사용하지 못하여 level off 시 속도가 낮아짐. 이는 속도계와 고도계의 cross-check이 느리기 때문에 발생한다.
8. VSI를 다른 pitch control instrument에 대해 cross-check 하지 못하여 수직 속도를 chase하게 됨.
9. 고도를 overshoot/undershoot 하게 됨. 이는 상승률/하강률을 확인하지 못하여 level off를 위한 lead를 결정하지 못한 경우 발생한다.
10. 하강으로부터 level off 도중 ballooning(기수가 상승함). 이는 수평 비행 순항 설정으로 출력을 증가할 때 forward-elevator pressure로 하강 자세를 유지하지 못한 경우 발생한다.
11. 직진수평비행 지시들이 가까워지는 것을 level off가 완료된 것으로 인지하지 못한 경우. 직진수평비행이 확실하게 설정되기 전까지 cross-check을 빠르게 유지한다.
'Instrument Flying Handbook(2012) > 7: Section I(analog 기본비행기동)' 카테고리의 다른 글
| (1) Introduction (0) | 2023.04.04 |
|---|---|
| (2) Straight and Level Flight (0) | 2023.04.04 |
| (4) Turns (0) | 2023.04.04 |
| (5) Approach to Stall (0) | 2023.04.04 |
| (6) Unusual Attitudes and Recoveries (0) | 2023.04.04 |