5-4-5. Instrument Approach Procedure (IAP) Charts
a. 14 CFR Section 91.175(a)는 14 CFR Part 97에서 규정된 SIAP의 사용을 필요로 한다(단, 관리자(ATC 포함)가 별도로 승인한 경우 제외). 민간 공항에 군 절차가 게재된 경우 14 CFR Part 91로 운항중인 항공기는 민간 절차를 사용해야 한다. 민간 절차는 괄호 안의 “FAA”로 표시된다(예를 들어 접근 차트의 상단이나 중앙의 (FAA)). DOD 절차는 괄호 안의 군사 서비스 축약어로 표시된다(예를 들어 (USAF), (USN), (USA)). 14 CFR Section 91.175(g)는 군 공항을 입출항하는 민간 조종사로 하여금 IAP와 takeoff and landing minimums를 준수하도록 요구한다. 군 공항을 운항하는 민간 항공기는 일반적으로 “Prior Permission Required”, 혹은 “PPR”이라 불리는 사전 승인을 필요로 한다(단, 비상 상황이 발생한 경우 제외). 특정 군 공항에 대한 PPR을 얻는 정보는 Chart Supplement U.S에서 확인할 수 있다.
NOTE-
ATC의 승인을 받은 경우 민간 항공기는 DOD IAP를 사용하여 practice VFR approaches를 수행할 수 있다.
1. IAP(standard and special, civil and military)는 U.S. Standard for TERPS에 포함된 joint civil and military 기준을 기초로 한다. TERPS 기준을 기초로 하는 IAP 설계는 공항∙시설, 그리고 주변 환경∙지형∙장애물∙소음 민감도 사이의 상호관계를 고려한다. 적절한 altitudes, courses, headings, distances, 그리고 기타 limitations가 규정되며 이들이 승인되면 계기 접근 절차로 게재 및 배포된다.
2. 모든 IAP가 차트 형태로 발부되는 것은 아니다. Radar IAP의 경우 시설과 조건이 만족하는 존재하는 곳에 설정된다. 허나 이는 U.S. Government Flight Information Publications에 표 형태로 인쇄되어 있다.
3. 계기 접근 절차를 비행하는데 필요한 항법 장비는 절차의 명칭, 그리고 차트의 notes로 표시된다.
(a) straight-in IAP는 final approach guidance를 제공하는 항법 시스템에 의해, 그리고 접근이 정렬되는 활주로 번호에 의해 식별된다(예를 들어 VOR RWY 13). circling only approaches는 final approach guidance를 제공하는 항법 시스템과 영문자에 의해 식별된다(예를 들어 VOR A). 둘 이상의 항법 시스템이 슬래시(/)로 구분될 경우 final approach를 수행하기 위해 둘 이상의 장비 유형이 사용되어야 함을 의미한다(예를 들어 VOR/DME RWY 31). 둘 이상의 항법 시스템이 “or”이라는 단어로 구분될 경우 final approach를 수행하기 위해 둘 중 하나가 사용될 수 있음을 의미한다(예를 들어 VOR or GPS RWY 15).
(b) 경우에 따라 접근 외의 부분들을 수행하기 위해, 혹은 IAF로 진행하기 위해 다른 유형의 항법 시스템이 필요할 수 있다(예를 들어 ILS로 향하기 위한 NDB procedure turn, 실패 접근에서의 NDB, 혹은 절차 진입이나 fix 식별을 위한 radar). en route environment에서 절차 진입을 위해 레이더나 그 외 장비가 필요한 경우 접근 절차 차트의 planview에 note가 표시된다(예를 들어 RADAR REQUIRED 혹은 ADF REQUIRED). final approach segment 바깥 부분(실패 접근 포함)에서 레이더나 그 외 장비가 필요한 경우 접근 차트 pilot briefing 부분의 notes box에 note가 표시된다(예를 들어 RADAR REQUIRED 혹은 DME REQUIRED). final approach segment 바깥에서 VOR이 필요하다 하여 note가 표시되지는 않는다. 조종사는 접근(실패접근 포함)을 수행하는데 필요한 NAVAID(s)가 항공기에 장착되어 있는지를 확인해야 한다.
NOTE-
일부 군(즉, 공군과 해군) IAP의 경우 접근 절차의 planview에만 이러한 “additional equipment required” notes를 표시하며 FAA에서 사용하는 것과 동일한 기준을 적용하지 않는다.
(c) ILS 접근의 final approach course를 비행하기 위해선 기타 항법 보조 장치가 필요한 LOC approaches에 대해 새로운 표기법을 제공하는 프로그램이 시작되었다. LOC minimums는 NAVAID required와 함께 게재된다(예를 들어 “DME Required”, 혹은 “RADAR Required”).
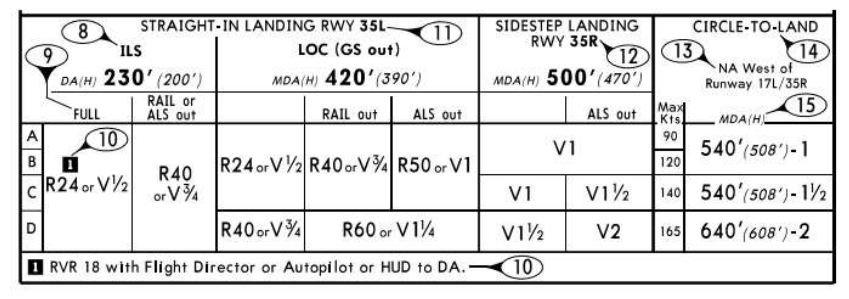
(d) RVR minima를 갖춘 ILS 접근들은 RVR 1800의 landing minimums를 가질 수 있다. 이러한 접근들 중 일부는 touchdown zone light와 centerline light를 갖춘 활주로에 대한 것이다. touchdown light와 centerline light를 갖추지 않은 활주로에도 RVR 1800의 landing minimums를 가질 수 있다. 이러한 활주로에서는 RVR 2400의 normal ILS minimum이 별표 기호"*"나 단검 기호“†”와 함께 표시될 수 있다(예를 들어 “** 696/24 200 (200/1/2)”). 차트에 “**RVR 1800 authorized with use of FD or AP or HUD to DA.”라는 내용의 note가 포함된다. 조종사는 결심 고도까지 flight director, approach coupler를 갖춘 autopilot, 혹은 head up display를 사용해야 한다. 안전을 위해 single pilot operators는 touchdown light와 centerline light가 없는 활주로에서 flight director만을 사용하여 1800 RVR minimums로 접근해서는 안 된다(단, approach coupler를 갖춘 autopilot을 함께 사용하는 경우 제외).
(e) 동일한 활주로에 대한 동일한 유형의 접근 명칭들도 변경되고 있다. 동일한 guidance를 갖춘 다양한 접근들은 알파벳 접미사를 가진다. 이는 후속 절차를 위해 알파벳의 끝에서 시작하여 역방향으로 만들어진다(예를 들어 ILS Z RWY 28, ILS Y RWY 28, 등등). ILS 2 RWY 28이나 Silver ILS RWY 28와 같은 기존의 표기법들은 단계적으로 사라지고 새로운 명칭으로 대체된다. Cat II와 Cat III 명칭들은 동일한 활주로에 대한 여러 ILS들을 구별하는데 사용된다.
(f) WAAS를 사용하여 LNAV, LP, LNAV/VNAV, 그리고 LPV lines of minima로 향하는 RNAV (GPS) approach의 경우, 그리고 GPS를 사용하여 LNAV와 LNAV/VNAV lines of minima로 향하는 RNAV (GPS) approach의 경우 차트에 RNAV (GPS) RWY (Number)라 표시된다(예를 들어 RNAV (GPS) RWY 21).
(g) Performance-Based Navigation(PBN) Box. 차트가 업데이트되면서 절차의 PBN requirements와 conventional equipment requirements가 별도의 notes boxes에 눈에 띄게 표시되었다. PBN elements를 갖춘 절차의 경우 PBN box에 절차의 navigation specification(s)이 포함된다. 그리고 필요한 경우 navigation solution에 필요한 특정 센서나 인프라, 추가적인 기능 조건, minimum RNP(Required Navigation Performance) value, 그리고 부연 설명이 포함된다. PBN box에 나열된 항목들은 절차의 PBN elements에 필요하다. 예를 들어 RNAV missed approach를 갖춘 ILS의 경우 실패 접근 구간을 비행하기 위한 특정 기능이 필요하다. 여기에 필요한 기능이 PBN box에 나열된다. 별도의 Equipment Requirements box는 지상 기반 장비의 필요조건을 나열한다. PBN elements와 equipment requirements를 모두 갖춘 절차의 경우 PBN requirements box가 먼저 나열된다.
4. approach minimums는 해당 공항의 local altimeter setting을 기반으로 한다(단, 차트에 달리 명시된 경우 제외). 예를 들어 Oklahoma City/Will Rogers World approaches는 Will Rogers World의 altimeter setting을 기반으로 한다. 다른 altimeter source가 필요한 경우, 혹은 둘 이상의 source가 인가된 경우 이는 접근 차트에 명시된다(예를 들어 use Sidney altimeter setting, if not received, use Scottsbluff altimeter setting). nonlocal altimeter source가 인가된 경우 approach minimums가 높아질 수 있다. 둘 이상의 altimeter source가 인가되었으며 minima가 서로 다르다면 이는 approach minima box의 separate lines에, 혹은 note에 명시된다(예를 들어 use Manhattan altimeter setting; when not available use Salina altimeter setting and increase all MDAs 40 feet). air traffic 이외의 source로부터 altimeter를 얻어야 하는 경우 note에 해당 source가 명시된다(예를 들어 Obtain local altimeter setting on CTAF). 접근의 기초가 되는 altimeter setting(s)을 이용할 수 없다면 접근이 승인되지 않는다. Baro-VNAV의 경우 local altimeter setting만을 사용하여 비행되어야 한다. local altimeter를 이용할 수 없는 곳의 경우 WAAS receivers를 위한 LNAV/VNAV line이 여전히 게재된다. 여기에는 Baro-VNAV가 인가되지 않는다는 note가 포함된다. local altimeter와 그 외의 altimeter setting source가 인가되었으나 local altimeter를 이용할 수 없는 경우 Baro-VNAV가 승인되지 않는다. 허나 WAAS receivers의 경우 alternate altimeter setting source를 사용하여 LNAV/VNAV minima를 비행할 수 있다.
NOTE-
Barometric Vertical Navigation(baro-VNAV). 항공기 고도계의 기압 고도 정보를 사용하여 vertical guidance path를 조종사에게 제공하는 RNAV system 기능. vertical path는 일반적으로 두 개의 waypoints 사이에서 계산되거나, 혹은 하나의 waypoint에 대한 각도를 기반으로 계산된다. 자세한 내용은 Advisory Circular 90-105에서 확인할 수 있다.
5. 접근 도중 IAP chart에 표시된 altitudes, flight paths, 그리고 weather minimums를 준수하는 것, 혹은 레이더 관제사가 발부한 vectors와 altitudes를 준수하는 것은 지형 및 장애물 회피와 활주로 정렬을 보장한다.
6. IAP는 en route environment에서 안전한 착륙이 이루어질 수 있는 지점까지 IFR descent를 제공하도록 설계되어 있다. 이는 특정 공항에서의 instrument flight conditions 도중 안전한 하강을 보장하도록 규정 및 승인된다. 조종사는 계기 접근을 수행하기 전에 이러한 절차와 그 사용법을 이해해야 한다.
7. TERPS 기준은 다음과 같은 유형의 계기 접근 절차를 위해 제공된다:
(a) Precision Approach(PA). ICAO Annex 10의 precision standards를 만족하는 course and glidepath deviation information을 제공하는 항법 시스템을 기반으로 하는 계기 접근. 예를 들어 PAR, ILS, 그리고 GLS가 정밀 접근이다.
(b) Approach with Vertical Guidance(APV). ICAO Annex 10의 precision approach standards를 충족하지는 않지만 course and glidepath deviation information을 제공하는 항법 시스템을 기반으로 하는 계기 접근. 예를 들어 Baro-VNAV, LDA with glidepath, LNAV/VNAV, 그리고 LPV가 APV approaches이다.
(c) Nonprecision Approach(NPA). course deviation information은 제공하지만 glidepath deviation information은 제공하지 않는 항법 시스템을 기반으로 하는 계기 접근. 예를 들어 VOR, NDB, 그리고 LNAV가 비정밀 접근이다. 일부 접근 절차는 stabilized approach를 비행하는데 도움이 되는 Vertical Descent Angle을 제공할 수 있다. 이는 접근을 APV procedure로 만들어주지는 않는다. 왜냐하면 이는 여전히 MDA까지 비행되어야 하며 glidepath로 평가되지 않기 때문이다.
b. 계기 접근 차트에서 고도를 표시하는데 사용되는 방법은 차트 출판사들마다 다르다. 고도는 네 가지 구성으로 표시될 수 있다: minimum ,maximum, mandatory, 그리고 recommended. 미국 정부는 NGA(National Geospatial-Intelligence Agency)와 FAA가 제작한 차트를 배포한다. 이러한 차트들의 profile view에 표시되는 고도들은 밑줄(minimum), 아랫줄(maximum), 밑줄과 아랫줄(mandatory), 혹은 줄 없음(recommended)로 표시된다.
1. minimum altitude는 밑줄이 쳐진 고도 값으로 표시된다. 항공기는 표시된 값 이상의 고도를 유지해야 한다.

2. maximum altitude는 윗줄이 쳐진 고도 값으로 표시된다. 항공기는 표시된 값 이하의 고도를 유지해야 한다.

3. mandatory altitude는 윗줄과 밑줄이 쳐진 고도 값으로 표시된다. 항공기는 표시된 값의 고도를 유지해야 한다.

4. recommended altitude는 줄이 쳐져있지 않은 고도 값으로 표시된다. 이러한 고도들은 descent planning을 위해 표시된다.

NOTE-
1. 조종사는 규정된 고도들을 준수하도록 주의해야 한다. 왜냐하면 경우에 따라 ATC는 항공기 수직 분리를 위한 기준으로 이 고도들을 사용할 수 있기 때문이다. ATC clearance에 차트의 고도가 지정되었다면 해당 고도는 mandatory가 된다.
2. ILS glide slope은 glide slope intercept altitude에서 교차되도록 만들어졌다. 이 지점이 PFAF를 나타내며 미국 정부 차트의 경우 “lightning bolt” 기호로 표시된다. 이 고도에서 glide slope를 교차하는 것은 final approach segment가 시작됨을 나타낸다. 그리고 glide slope intercept altitude에서 decision altitude로 하강하는 동안 required obstacle clearance를 보장한다. glide slope interception altitude 전에 glide slope을 track 한다 하여 이전 fix들에 대해 게재된 minimum, maximum, 그리고/혹은 mandatory altitudes가 준수되는 것은 아니다. glide slope interception altitude 전에 glide slope을 track 하기로 결정하였다면 이전 stepdown fixes에 대해 게재된 고도들을 준수해야 한다.
3. simultaneous(parallel) independent operation과 simultaneous close parallel operation에 사용되는 접근의 경우 절차상 approach clearance에서 발부된 고도로부터 glideslope을 통해 하강해야 한다(5-4-15와 5-4-16 참조). simultaneous close parallel(PRM) approaches의 경우 glideslope/glidepath를 통해 하강하는 것이 모든 crossing restrictions를 만족함을 지시하는 note가 AAUP(Attention All Users Page)에 게재될 수 있다. 허나 이러한 note가 게재되어있지 않은 경우, 그리고 AAUP가 게재되지 않은 simultaneous independent approaches(4300 이상의 활주로 분리)의 경우 조종사는 crossing restrictions를 준수하기 위해 PFAF 바깥에서 glideslope/path로 하강하는 것을 모니터링 해야 한다.
4. parallel approach courses 사이의 간격이 2500ft 미만이며 simultaneous dependent operations를 위해 reduced in-trail spacing이 승인된 경우 vertical guidance가 필요하다는, 그리고 glide slope에 설정되기 전까지는 마지막으로 할당받은 고도를 유지해야 한다는 chart note가 표시된다. 이러한 접근들은 절차상 항적 난기류 완화를 위해 ILS glide slope을 필요로 한다. 조종사들은 이러한 simultaneous dependent operations는 SOIA(simultaneous close parallel PRM approaches)와 혼동해서는 안 된다.
5. final approach segment 내의 stepdown fixes에 표시된 altitude restrictions는 MDA(H)로 식별되는 straight-in line of minima나 circling line of minima에만 적용된다(즉, 비정밀 접근). 이러한 altitude restrictions에는 “LOC only”나 “LNAV only”라는 note가 포함될 수 있다. final approach segment 내의 stepdown fix altitude restrictions는 DA(H)로 식별되는 Precision Approach(ILS)나 APV approach(LPV, LNAV/VNAV)의 lines of minima에는 적용되지 않는다. 왜냐하면 이러한 접근들의 장애물 회피는 vertical guidance를 따르는 항공기를 기반으로 하기 때문이다. final approach segment 바깥(즉, initial segment나 intermediate segment)에 있을 때 조종사는 현재 비행 중인 절차의 유형에 관계없이 stepdown fix altitude를 준수해야 한다. (그림 5-4-1 참조.)

c. MSA(Minimum Safe Altitudes)는 비상 상황을 위해 IAP나 DP(departure procedure) 차트에 게재된다. MSA는 모든 장애물로부터 1,000ft의 장애물 간격을 제공한다. 허나 이는 이용 가능한 항법 신호 범위를 보장하지는 않는다. 접근 차트나 DP 차트에 표시된 MSA는 다음으로 구성된다: MSA 중심점의 식별자, MSA의 반경, sector(s)에 대한 설명, 그리고 장애물 회피를 제공하는 minimum altitudes(MSL). conventional navigation systems의 경우 MSA는 보통 IAP나 DP 차트가 기반으로 하는 primary omnidirectional facility를 기초로 한다. 허나 적절한 시설이 없다면 ARP(airport reference point)를 기반으로 할 수도 있다. RNAV 접근 차트나 RNAV DP 차트의 경우 MSA는 RNAV waypoint를 기초로 한다. MSA는 보통 25NM의 반경을 갖는다. 허나 conventional navigation systems의 경우 공항 착륙 표면을 둘러싸기 위해 반경이 30NM로 확장될 수 있다. 보통 MSA는 하나의 sector altitude로 설정된다. 허나 MSA가 시설을 기반으로 하며 장애물 회피를 위해 필요하다면 최대 4개의 섹터로 구성된 MSA가 설정될 수 있다.
d. Terminal Arrival Area(TAA)
1. TAA는 RNAV(Area Navigation) 시스템을 갖춘 항공기로 하여금 en route structure에서 terminal environment로 전환할 수 있도록 해준다. TAA boundaries 내를 운영할 경우 TAA는 standard obstacle clearance를 갖춘 minimum altitudes를 제공한다. TAA는 주로 RNAV approaches에서 사용된다(단, 항적이 많은 지역에서는 보통 TAA가 사용되지 않는다). 허나 IF로 진행하기 위한 유일한 수단이 RNAV인 경우 ILS approach에서도 TAA가 사용될 수도 있다.
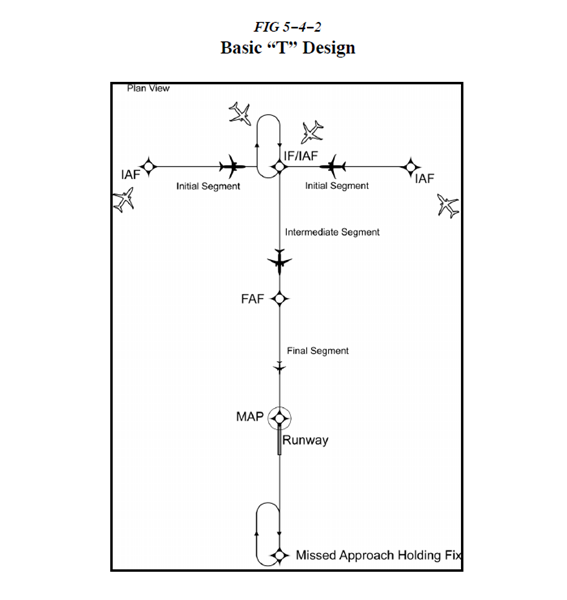
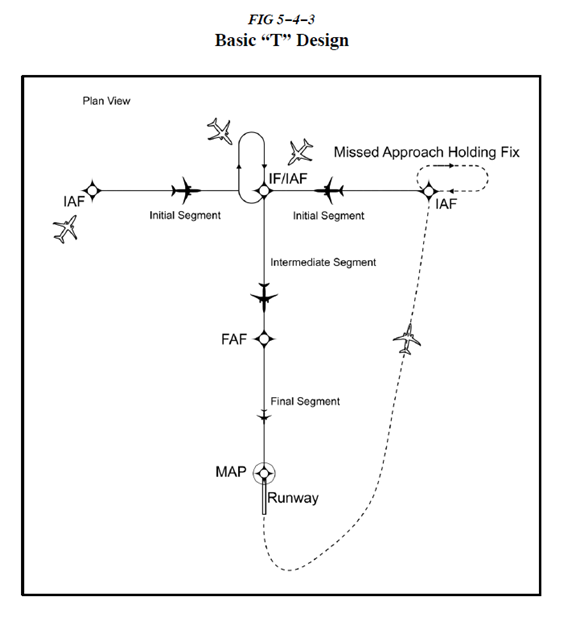
2. TAA의 기초가 되는 RNAV procedure의 기본 설계는 일반적으로 “T” design이다(이는 “Basic T”라고도 불림). “T” design은 두 개의 IAF와 dual purpose IF/IAF(intermediate fix와 initial approach fix를 둘 다 기능함)를 통합한다. T configuration은 IF/IAF에서 FAF(final approach fix)로, 그리고 MAP(missed approach point)로 이어진다. 두 개의 base leg IAF는 일반적으로 직선으로 연결되며 이 직선은 IF/IAF에서 intermediate course와 수직으로 교차한다. HILPT(Hold-in-Lieu-of Procedure Turn)은 IF/IAF에 설정된다. 이는 “hold-in-lieu-of-PT” holding pattern symbol을 통해 미국 정부 차트에 표시된다. course 정렬 및/혹은 하강을 위해 HILPT가 필요한 경우 pattern entry 시 dual purpose IF/IAF가 IAF의 역할을 제공한다. HILPT pattern 진입 후 “NoPT”라 지정된 route나 sector를 비행하는 경우 dual-purpose fix가 IF의 역할을 하며 Intermediate Segment의 시작점을 나타낸다. 그림 5-4-2와 그림 5-4-3은 Basic “T” TAA configuration을 나타낸다.
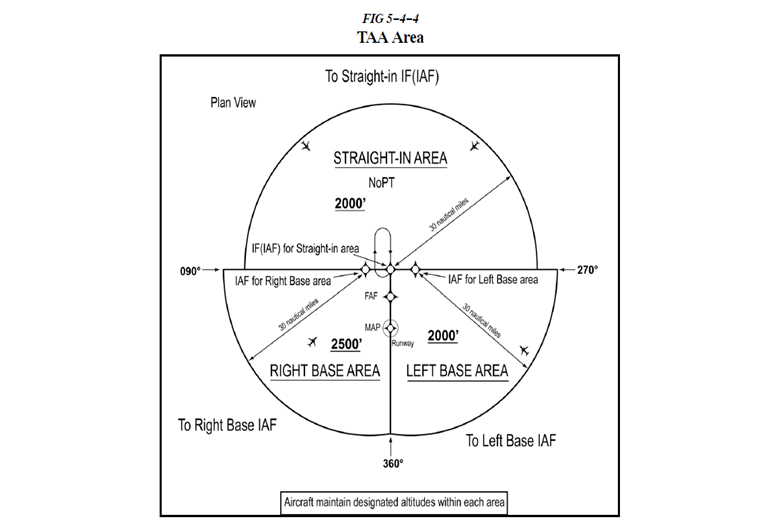
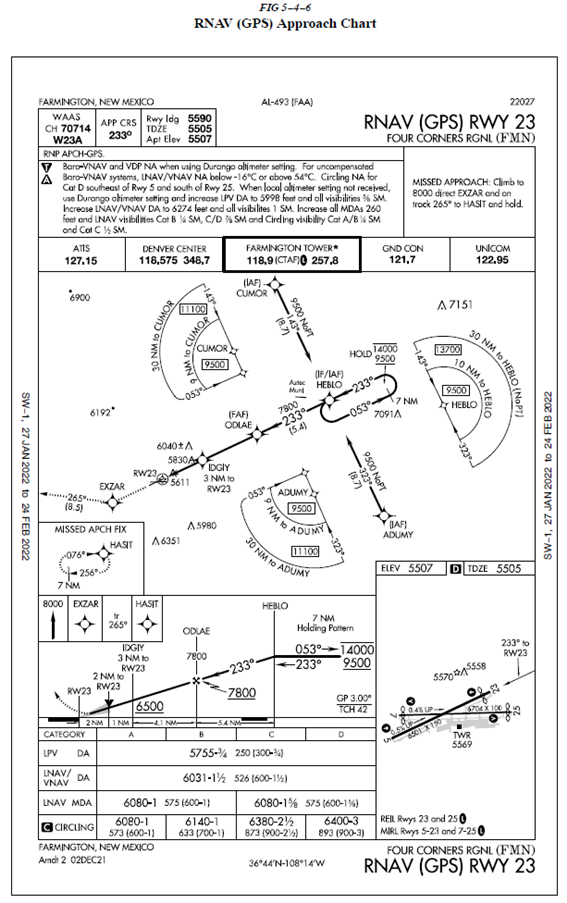
3. “T” design을 기초하는 standard TAA는 IAF(Initial Approach Fix) legs와 intermediate segment course에 의해 규정되는 세 개의 영역으로 구성된다. 이러한 영역들은 straight-in area, left-base area, 그리고 right-base area라 불린다. (그림 5-4-4- 참조). TAA area 경계선은 IF/IAF로 향하는 TO magnetic courses에 의해 식별된다. straight-in area는 파이 모양의 구역으로 나뉠 수 있으며 그 경계선은 IF/IAF로 향하는 TO magnetic courses에 의해 식별된다. 또한 straight-in area는 step-down sections를 포함할 수도 있으며 이는 IF/IAF로부터의 RNAV 거리를 기초로 하는 호(arc)에 의해 식별된다 (그림 5-4-5 참조.) right/left-base areas의 경우 IAF로부터의 RNAV 거리를 기초로 하는 호(arc)에 의해 세분화될 수 있다.

4. 일반적으로 no procedure turn(NoPT) routing을 통해, 혹은 course reversal maneuver를 통해 terminal area에서 절차로 진입한다. course reversal이 인가되지 않은 특정 TAA sector를 나타내기 위해 절차에 “NoPT”가 표시된다. 비록 절차에 의해 요구되지 않아도 조종사는 course reversal pattern을 사용하길 선택할 수 있다. 허나 절차를 시작하기 전에 ATC로부터 clearance를 받아야 한다(14 CFR Section 91.175).
(a) ATC는 항공기가 left/right base leg IAF를 90 이하로 통과하는 교차 각도를 승인해야 한다. sector나 procedure segment가 “NoPT”로 표기된 경우 조종사는 HILPT course reversal을 수행해서는 안 된다.
(b) IF/IAF로 향하는 course가 “NoPT”로 표기된 straight-in sector 내에 있으며 교차 각도가 90도를 초과하지 않는다면 ATC는 항공기가 IF/IAF로 직접 향하도록 승인할 수 있다. 조종사는 IF/IAF로 직접 향해야 하며 straight-in approach를 수행해야 한다. HILPT course reversal을 수행해서는 안 된다. 또한 ATC가 IF/IAF를 향해 radar vectors와 monitoring을 제공하며 “straight-in” approach clearance를 발부하였다면 조종사는 straight-in approach를 수행해야 한다. 그렇지 않다면 조종사는 HILPT course reversal을 수행해야 한다.
REFERENCE-
AIM, Para 5−4−6, Approach Clearance.
(c) 종종 ATC는 접근 절차의 명칭을 명시하지 않거나, 혹은 특정 IAF를 명시하지 않고 접근을 인가할 수 있다. 어느 경우이든 조종사는 현 위치로부터 approach course에 진입할 섹터와 관련된 IAF, 혹은 IF/IAF로 직접 향해야 한다. 해당 섹터에서 요구하는 경우(즉, 해당 섹터에 “NoPT”가 표시되지 않은 경우) HILO course reversal을 완료해야 한다.
NOTE-
섹터를 나누는 경계선의 TO bearing을 따라 접근하는 경우 조종사는 “NoPT” 경로를 따라 진행해야 한다(단, ATC로부터 달리 지시받은 경우 제외).
5. TAA 내에 게재된 고도들은 MSA altitude를 대신한다. 허나 TAA altitude는 MSA altitude와는 달리 운영상 이용이 가능하다. 이 고도들은 최소 1,000ft의 장애물 회피를 제공한다(산악 지역에서는 더 많이 제공됨). 조종사는 최소 고도 조건을 준수하기 위해 항공기가 진입하는 TAA sector를 알고 있어야 한다. 조종사는 IF/IAF fix로 향하는 TO magnetic bearing을 확인함으로서 항공기가 어떤 TAA 섹터에 진입하는지를 결정할 수 있다. 해당 bearing을 TAA의 lateral boundary bearing과 비교한다. 위치 결정을 위해 right-base IAF나 left-base IAF로 향하는 bearing을 사용하지 않는다.
(a) IAF나 IF/IAF로 직접 향하라는 ATC clearance에 approach clearance가 포함되지 않았다면 하강이 승인되지 않는다. 만약 더 낮은 TAA 고도를 원한다면 이를 ATC에 요청해야 한다. 만약 clearance를 잘 모르겠다면 ATC에 confirm을 요청하거나 구체적인 clearance를 요청한다. two-way communications failure(14 CFR 91.185, IFR Operations: Two-way Radio Communications Filure)상태로 TAA에 진입하고 있다면 적절한 IAF에 도달하기 전까지는 14 CFR 91.185(c)(2)에서 규정하는 가장 높은 고도를 유지해야 한다.
(b) 접근을 승인받은 경우 조종사는 TAA 내에서 특정 섹터의 minimum altitude로 하강할 수 있다(단, ATC로부터 달리 지시받은 경우 제외). 조종사는 IF/IAF에서 FAF로 정상 하강을 수행할 수 있도록 TAA 내 강하를 계획해야 한다. 그림 5-4-5에서 left-base나 right-base에 위치한 조종사는 IAF로부터 17NM 이내에 도달하기 전까지는 6,000ft의 minimum altitude를 유지해야 한다. 17NM arc를 통과한 후에는 차트에 표시된 더 낮은 고도로 하강할 수 있다. 북서쪽에서 접근하는 조종사는 6,000ft의 minimum altitude를 유지해야 한다. 그리고 IF/IAF로부터 22NM 이내에 도달하였다면 IF/IAF를 통과하기 전까지 2,000ft MSL의 minimum altitude로 하강한다.
6. 미국 정부 차트는 plan view에 표시된 실제 접근 절차의 바깥 부분에 아이콘들을 배치하여 TAA를 표시한다(그림 5-4-6 참조).. 이러한 아이콘들은 “T” procedure(altitudes, courses, minimum altitudes, 등등)가 가려지는 것을 방지하기 위함이다. 각 TAA area에 대한 아이콘이 접근 절차의 입항 방향과 관련하여 배치된다. 아이콘은 TAA minimum altitudes와 sector/radius subdivisions를 나타낸다. 아이콘과 접근 절차를 맞추는 것을 돕고자 TAA area에 대한 IAF가 아이콘에 포함된다. IAF의 명칭, 그리고 IAF로부터 TAA area boundary까지의 거리가 아이콘의 바깥쪽 호에 표시된다.
7. 운영상 조건이나 ATC 조건을 수용하기 위해 TAA의 크기와 모양이 수정될 수 있다. 일부 섹터들은 제거되고 그 외 섹터들은 확장될 수 있다. 지형이나 ATC 고려사항으로 인하여 “T” design이 수정될 수 있다. 예를 들어 “T” design은 규칙적이거나 불규칙적인 “Y” 모양, 거꾸로 된 “L” 모양, 혹은 “I” 모양처럼 보일 수 있다.
(a) 그림 5-4-7은 left base leg와 right base leg가 없는 TAA를 묘사한다. 이 예시에서 IF/IAF를 향한 TO bearing이 271 ~ 089인 조종사는 course reversal을 수행해야 한다. 왜냐하면 IF/IAF에서 필요한 선회 양이 90도를 초과하기 때문이다. 윗부분의 TAA 아이콘 경계선에는 “NoPT”라는 용어가 표기될 것이다.

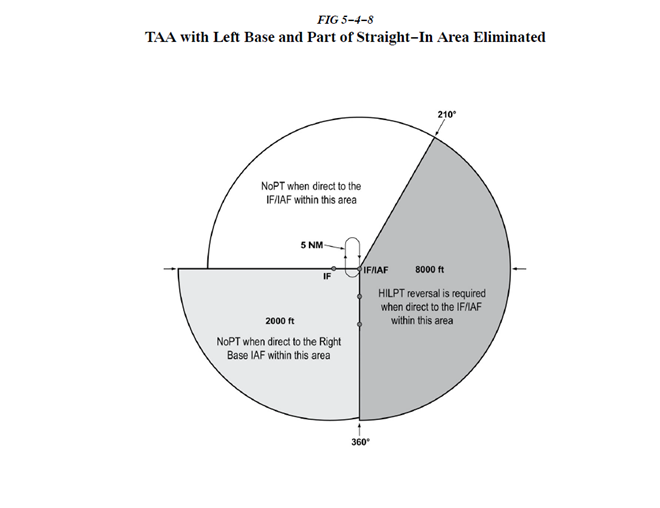
(b) 그림 5-4-8은 또 다른 TAA 모양을 나타낸다. 이 예시에서 left base area와 straight-in area의 일부가 제거되었다. IF/IAF를 향한 TO bearing이 210 ~ 360인 조종사는 항공기의 intermediate segment 정렬을 위해, 혹은 과도한 하강률 방지를 위해 course reversal을 수행해야 한다. IF/IAF를 향한 TO bearing이 001 ~ 090인 조종사는 right base IAF로 직접 향한 후 course reversal을 수행해선 안 된다. 이 sector 내에서 IF/IAF로 직접 향하도록 승인받은 경우 HILPT를 수행해야 한다. IF/IAF를 향한 TO bearing이 091 ~ 209인 조종사는 IF/IAF로 직접 향한 후 course reversal을 수행해선 안 된다. 이러한 두 영역은 plan view에 표시된 아이콘의 TAA 경계선에 “NoPT”라 표기된다.
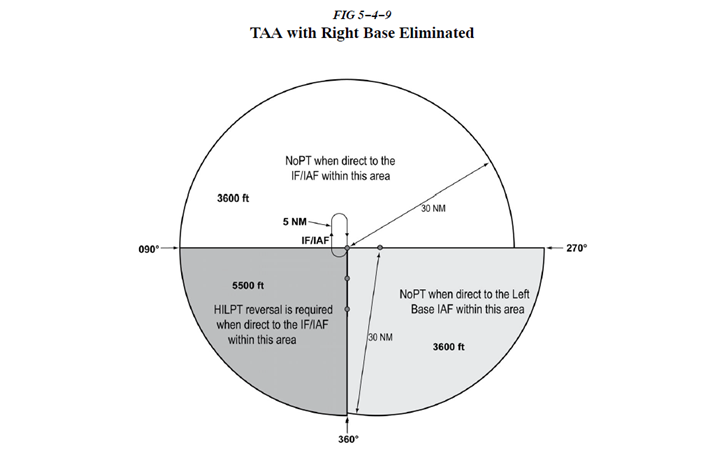
(c) 그림 5-4-9는 right base area가 제거된 TAA를 나타낸다.
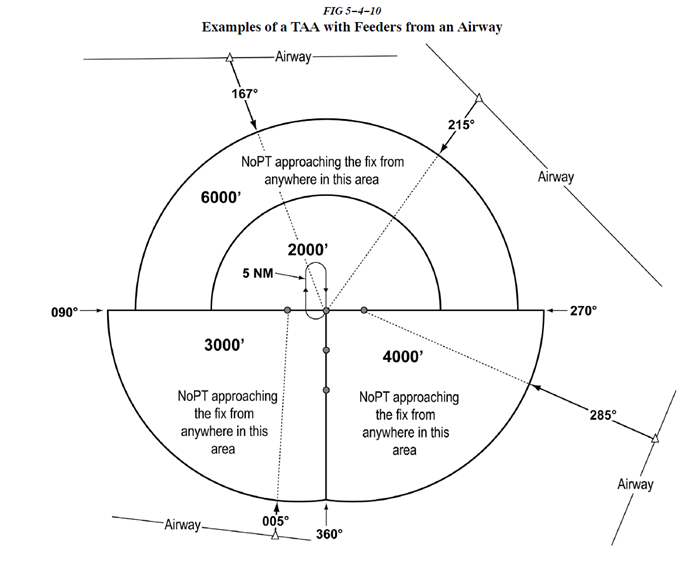
8. 항로가 TAA의 측면 경계를 지나지 않는 경우에는 airway fix나 NAVAID로부터 TAA 경계까지 feeder route가 설정된다. 이는 en route structure에서 IAF로의 transition을 제공하기 위함이다. 각 feeder route는 TAA 경계에서 종료되며 IAF로 향하는 경로를 따라 연장된다. TAA 경계를 통과한 후 ATC로부터 접근을 승인받았다면 TAA altitude로 하강해야 한다. (그림 5-4-10 참조).
9. “T”에 표시된 각 waypoint에는 발음이 가능한 5글자의 이름이 할당된다(단, missed approach waypoint 제외). 이러한 이름들은 ATC 교신, RNAV 데이터베이스, 그리고 항공 차트들에 사용된다. missed approach waypoint가 runway threshold에 위치하지 않는 경우에는 발음이 가능한 이름이 할당된다.
e. Minimum Vectoring Altitudes(MVAs)는 레이더 관제 시 ATC가 사용하도록 설정된다. 항공 교통 시설은 다양한 minimum IFR altitudes가 존재하는 위치에 대해 MVA charts를 작성한다. MVA chart는 항공기의 vectoring을 수용할 수 있을 만큼 충분히 큰 섹터들을 갖춘다. 각 섹터의 경계선은 MVA가 결정되는 장애물로부터 최소 3마일 이상 떨어져 있다. 하나의 두드러진 장애물로 인하여 넓은 범위의 섹터가 과도하게 높은 MVA를 갖추는 것을 방지하기 위하여 해당 장애물을 최소 3마일의 경계선으로 둘러쌀 수 있다. 이는 장애물 주변에서의 vectoring을 용이하게 만들기 위함이다. (그림 5-4-11 참조.)
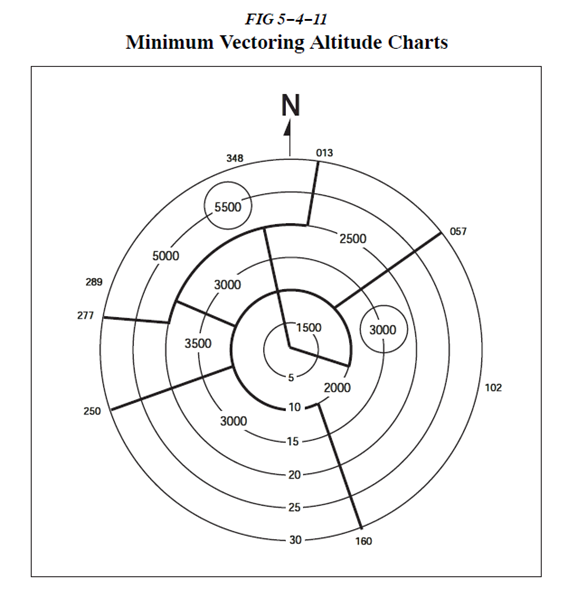
1. 비산악 지형의 경우 각 섹터의 minimum vectoring altitude는 가장 높은 장애물로부터 1,000ft(산악 지형의 경우에는 2,000ft)의 간격을 제공한다. 특정 산악 지형에서 terminal routes와의 호환을 위해, 혹은 IAP로 향하는 vectoring을 위해 더 낮은 MVA가 필요한 경우 ATC surveillance를 통해 1,000ft의 장애물 간격이 인가될 수 있다. minimum vectoring altitude는 관제 공역의 하단으로부터 최소 300ft의 간격을 제공한다.
NOTE-
OROCA는 미국에서 1,000ft의 지형 및 장애물 회피를 제공하는 고도이다(특정 산악 지형의 경우 2,000ft). 이러한 고도는 NAVAID 신호 범위, ATC surveillance, 혹은 교신 범위에 대해 산정되지 않는다. 대신 이는 전반적 상황 인식, 비행 계획, 그리고 비상 상황을 위해 게재된다.
2. MVA가 고려되는 지역과 그 외 minimum altitudes가 적용되는 지역의 차이로 인해, 그리고 특정 장애물을 분리하는 기능으로 인해 일부 MVA가 nonradar MEAs(Minimum En Route Altitudes), MOCAs(Minimum Obstruction Clearance Altitudes), 혹은 그 외 minimum altitudes보다 낮을 수도 있다. radar vector 도중 ATC가 할당하는 IFR altitude는 MVA 이상이다.
3. MVA/MIA는 TAA minimum altitude보다 낮을 수 있다. 항공기가 TAA minimum altitude 미만일 경우 ATC는 published route나 instrument approach procedure에 설정되기 전까지 유지해야 할 고도를 할당하거나, 혹은 항공기를 TAA altitude로 상승시켜야 한다.
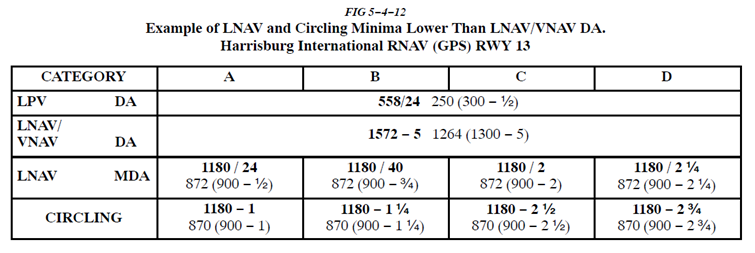
f. Circling. RNAV(GPS) approach chart에 표시된 circling minimums는 LNAV/VNAV line of minima보다 낮을 수 있다. 허나 circling minimums가 LNAV line of minima(straight-in approach)보다 낮아서는 안 된다. 항공기 category 및 operational limitations에 따라 circling maneuver를 적절하게 수행할 경우 조종사는 circling line of minima에서 안전하게 circling maneuver를 수행할 수 있다.
g. 그림 5-4-13은 LNAV MDA, circling MDA, LNAV/VNAV DA에 대한 장애물의 평가 및 계산을 시각적으로 나타낸 것이다.
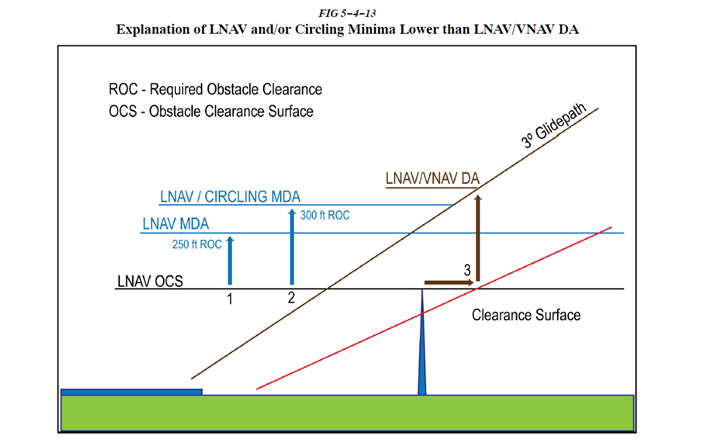
1. No vertical guidance (LNAV). 장애물 고도에 ROC(Required Obstacle Clearance)를 위한 250ft를 더하여 수평선이 그려진다. LNAV MDA를 결정하기 위해 사용되는 controlling obstacle은 circling MDA를 위해 사용되는 controlling obstacle과 다를 수 있다. 이 외의 요인들로 인해 250ft보다 높은 값이 LNAV OCS에 추가될 수 있다. 이 값은 20ft 단위로 반올림 된다.
2. Circling MDA. circling MDA는 장애물 회피가 고려되는 영역 내에서 300ft의 장애물 회피를 제공한다. 이는 LNAV/VNAV DA보다 낮을 수 있으나 straight in LNAV MDA보다 낮아선 안 된다. 이는 서로 다른 controlling obstacles가 사용될 때, 혹은 그 외의 요인들로 인해 LNAV MDA가 LNAV OCS로부터 250ft보다 높을 때 발생할 수 있다. 그림 5-4-12에서 LNAV와 circle을 위한 ROC가 동일하여 MDA가 같으나 LNAV/VNAV DA보다는 낮다.
3. Vertical Guidance (LNAV/VNAV). 장애물 고도로부터 수평선이 그려진다. 이 선이 OCS(obstacle clearance surface)에 도달하면 그 지점으로부터 수직선이 그려진다. 이 수직선이 glide path와 교차하는 지점이 접근에 대한 DA이다. 이러한 방법은 장애물을 LNAV/VNAV DA 전방에 배치시키는데, 이를 통해 장애물을 보고 회피할 수 있다. 경우에 따라 LNAV/VNAV DA가 LNAV 및/혹은 Circling MDA보다 높을 수 있다.
h. Visual Descent Point(VDP)는 nonprecision straight-in approach procedure의 final approach course에 규정된 특정 지점이다. 이는 (V) 모양 기호로 식별된다. 이 지점에서 MDA 고도로부터 runway touchdown point를 향한 시각 강하가 수행될 수 있다. 조종사는 VDP에 도달하기 전에 MDA 미만으로 하강해서는 안 된다. VDP는 DME를 통해, 혹은 MAP로부터의 RNAV along-track distance를 통해 식별된다. VDP 거리는 IAP에 게재된 가장 낮은 MDA를 기반으로 하며 VGSI(visual glide slope indicator) 각도와, 혹은 VDA와 일치한다. MDA와 runway touchdown point 사이에서 안정적인 하강이 불가능할 수 있는 특정 상황에서는 VDP가 게재되지 않을 수 있다. MDA와 runway threshold 사이의 visual surface를 침범하는 장애물이 존재하는 경우, 거리 측정 기능이 결여된 경우, 혹은 절차 설계로 인해 VDP가 식별될 수 없는 경우 이러한 상황이 발생한다.
1. 항공기가 MDA에서 안정된 하강을 수행할 위치에 놓여있는지를 결정하기 위한 시각적 보조 장치로 VGSI를 사용할 수 있다. 시정이 minimums에 가까운 경우 VDP에서 VGSI가 보이지 않을 수 있다. 이는 VGSI가 MAP 너머에 위치하기 때문이다.
2. VDP를 이용할 수 있는 장비가 없는 경우 조종사는 마치 VDP가 없는 것처럼 접근을 수행해야 한다.
3. straight-in nonprecision IAP 도중 VDP와 MAP 사이에서 MDA 미만으로 하강하는 것이 불가능할 수 있다. 안전한 하강 및 착륙이 가능한지의 여부를 결정하기 위해 조종사는 항공기 속도, 활주로로부터의 높이, 하강률, 선회의 양, 그리고 활주로 길이를 고려해야 한다.
i. 모든 IAP에 대한 절차 설계 도중 visual segment obstruction evaluation이 수행된다. 장애물들(등화가 장착된 장애물과 등화가 장착되지 않은 장애물 모두 포함)은 visual segment obstacle identification surfaces를 침범할 수 있다. 장애물 침범으로 인해 계기 접근 운영이 제한될 수 있다. 이러한 제한으로는 접근 시정 조건 증가, VDP 미게재, 그리고/혹은 야간 계기 운영 금지가 포함될 수 있다. MDA/DA로부터 touchdown point까지의 장애물 보호가 절대적이지는 않다. 따라서 MDA/DA 미만에서 장애물을 육안으로 확인 및 회피하는 것은 조종사의 책임이다.
1. 등화가 장착되지 않은 장애물의 침범으로 인해 야간 계기 운영이 금지될 수 있다. pilot briefing strip에 “Procedure NA at Night”라 게재될 것이다.
2. 야간 계기 운영을 위해 obstruction lighting 대신 VGSI를 사용하는 것이 승인될 수 있다. pilot briefing strip에 “Straight-in Rwy XX at Night, operational VGSI required, remain on or above VGSI glidepath until threshold.”라 게재될 것이다.
j. 가장 높은 장애물(인공 장애물, 지형, 혹은 식물)이 IAP의 planview에 표시된다. 활주로로부터의 거리, 혹은 차트의 여백에 따라 이 외의 장애물들이 planview나 airport sketch에 표시될 수 있다. 장애물의 높이는 평균 해수면으로부터 ft 단위로 표시된다. 높이가 정확하지 않은 장애물의 경우 높이 값 옆에 ± 기호가 포함된다.
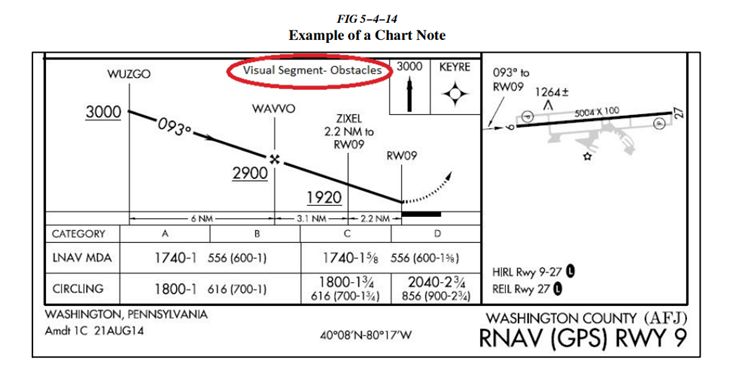
k. Vertical Descent Angle(VDA). 모든 비정밀 접근에 대해 VDA/TCH를 게재하는 것이 FAA의 정책이다(단, vertically guided minimums와 함께 게재된 절차(즉, ILS or LOC RWY XX), 혹은 step-down fix를 갖추지 않은 no-FAF procedures(즉, on-airport VOR이나 on-airport NDB)는 제외). VDA가 존재한다 하여 visual segment에서 장애물 회피가 보장되는 것은 아니며 비정밀 접근을 비행하기 위한 조건을 변화시키지도 않는다.
1. visual segment에서 장애물이 obstacle identification surface를 침범하는 경우에는 VDA/TCH가 인가되지 않는다. 대신 profile view에 “Visual Segment – Obstacles”가 표시된다(그림 5-4-14 참조). 따라서 조종사는 접근 절차를 신중하게 검토하여 최적의 stabilized descent를 시작할 수 있는 위치를 확인해야 한다. 이러한 note를 갖춘 접근 도중 MDA 미만에서 RNAV system이 제공하는 강하 각도를 사용할 경우 visual segment에서 장애물과 마주칠 수 있다. 조종사는 MDA 미만의 장애물을 육안으로 회피해야 한다.
(a) IAP chart 게재를 위해, 그리고 항법 데이터베이스 코딩을 위해 FAA는 VDA/TCH 정보를 제공한다(단, “Visual Segment – Obstacles”라는 note로 대체된 경우 제외).
(b) 설령 FAA가 이러한 정보를 제공하지 않더라도 상업용 차트 제공자와 항법 시스템은 VDA/TCH를 게재 및 계산할 수 있다. VDA/TCH 유무와 관계없이, 그리고 항법 시스템의 advisory vertical guidance 유무와 관계없이 조종사는 visual segment에서 장애물을 회피할 책임을 가지고 있음을 주의해야 한다.
2. 하강 각도 계산에 사용된 TCH(threshold crossing height)는 VDA와 함께 게재된다. VDA와 TCH 정보는 profile view에서 VDA 계산에 사용된 fix(FAF/stepdown) 옆에 표시된다. 동일한 활주로에 PA/APV IAP가 설정되어있지 않은 경우 VDA는 VGSI의 glide path angle 이상일 것이다. VGSI가 VDA와 일치하지 않는 경우 chart note가 이를 나타낼 것이다. VDA는 단지 advisory information이다. 이를 계기 절차에서 유도해낸 vertical guidance라 간주해서는 안 된다. VDA는 final approach에 놓인 조종사가 지속적인, 그리고 안정된 하강을 설정하는데 도움을 제공하는 보조 수단일 뿐이다.
3. 조종사는 target rate of descent를 찾기 위해 차트에 게재된 각도와 ground speed를 이용할 수 있다. 이는 U.S. Terminal Procedures Publication의 뒷면에 게재된 rate of descent table을 통해 가능하다. VDA를 안정된 하강의 보조 수단으로 사용하기 위해 이러한 하강률을 사용할 수 있다.
4. 과도한 descent gradient가 필요한 경우 straight-in aligned procedure가 circling only minimums로 제한될 수 있다. FAF/stepdown fix와 Circling MDA 사이의 하강 각도는 TERPS 기준에서의 최대 하강 각도를 초과해서는 안 된다. 이러한 절차에 게재된 VDA는 straight landing이 권장됨을 의미하는 것이 아니며 straight landing이 가능함을 의미하는 것 또한 아니다. VDA를 기반으로 하는 하강률이 항공기의 성능을 초과할 수도 있으므로 조종사는 안전한 착륙을 위해 circling area 내에서 항공기를 기동하는 방법을 결정해야 한다.
l. 경우에 따라 IAP에 visual flight path가 포함될 수 있다. 이러한 절차에는 “Fly Visual to Airport”, 혹은 “Fly Visual”이라 표기된다. visual flight path를 나타내는 점선 모양의 화살표가 end of the runway로 향하는 대략적인 heading 및 distance와 함께 profile view와 plan view에 포함될 것이다.
1. “Fly Visual to Airport” segment와 관련된 ground track은 “Dead Reckoning” course처럼 비행되어야 한다. “Fly Visual to Airport” segment 수행 시 비행 시정이 IAP에 대한 minimums 미만이어서는 안 된다. 조종사는 구름으로부터 개방된 상태를 유지해야 하며 지상을 육안 확인한 상태에서 공항으로 진행해야 한다. visual flight path에서의 고도는 조종사 재량으로 결정된다. “Fly Visual to Airport” segment에서 장애물을 육안으로 확인 및 회피하는 것은 조종사의 책임이다.
2. 실패접근이 MAP에서 수행되는 경우에만 missed approach obstacle clearance가 보장된다. “Fly Visual to Airport” segment를 포함하는 IAP를 수행하기 전에 조종사는 항공기 성능과 지형 특성을 기초로 하는 상승 계획을 미리 세워두어야 한다. MAP 너머로 접근이 계속될 경우 장애물 회피는 조종사의 책임이다.
NOTE-
FAA Administrator는 14 CFR § 91.175에서 명시하는 visual references들 중 하나를 반드시 확인해야할 필요가 없는 곳에 대해 계기 접근 절차를 승인할 권한을 가지고 있다. § 91.175의 조건이 준수되도록 보장하는 것은 절차 설계의 기능이 아니다. “Fly Visual to Airport”는 MDA/DA 미만으로 하강하기 전에 뚜렷한 시각 참조물을 확인해야 한다는 § 91.175 조건을 완화한다.
m. Area Navigation (RNAV) Instrument Approach Charts. 새로운 시스템(예를 들어 GPS)과 augmented GPS(예를 들어 WAAS – Wide Area Augmentation System)이 개발 및 배치됨에 따라 계기 운영을 위해 RNAV systems를 의존하는 것이 점차 보편화되고 있다. RNAV procedures를 NAS(National Airspace System)에 완전히 통합하기 위해 FAA는 새로운 형식의 IAP를 개발하였다(그림 5-4-6 참조). 이러한 형식은 계기 접근 차트의 불필요한 중복을 방지한다. 단순히 “GPS”라 제목이 지정된 기존의 stand alone GPS charts는 절차들이 개정됨에 따라 새로운 형식으로 전환되고 있다. 이러한 개정 이유 중 하나는 접근 차트에 WAAS based minima를 추가하기 위함이다. 새로운 형식의 접근 차트 제목은 “RNAV (GPS) RWY XX.”이다. 이러한 차트에는 최대 4줄의 minima가 포함된다. GBAS(Ground Based Augmentation System) Landing System(GLS)는 WAAS 및 LAAS minima를 위한 플레이스홀더였으며 minima에는 항상 N/A라 적혀있었다. 이제 GLS minima line은 대부분의 RNAV (GPS) charts에서 WAAS LPV(Localizer Performance with Vertical Guidance) minima로 대체되었다. WAAS electronic vertical guidance와 Barometric VNAV를 모두 지원하기 위해 LNAV/VNAV (lateral navigation/vertical navigation)가 추가되었다. LPV와 LNAV/VNAV는 모두 APV procedures이다(paragraph 5-4-5a7). “S-XX”(= straight in runway XX)라 표기된 기존의 GPS minima는 이제 LNAV (lateral navigation)이라 표기된다. circling minima 또한 게재될 수 있다. 새로운 유형의 nonprecision WAAS minima 또한 이 차트에 LP(localizer performance)라 게재된다. 지형 및 장애물로 인해 vertically guided minima가 제공될 수 없는 위치의 경우 LP가 게재된다. 따라서 LPV나 LNAV/VNAV minima가 게재되지 않는다. GBAS procedures는 별도의 차트에 게재된다. GLS minima line은 GBAS에서만 사용된다. RNAV procedure에 대한 ATC clearance는 조종사로 하여금 항공기 장비에 따라 minimums를 선택할 수 있도록 한다(예를 들어 WAAS를 장비한 항공기는 LPV minima나 LP minima를 이용할 수 있다. 허나 GPS만을 장비한 항공기는 LPV minima나 LP minima를 이용할 수 없다). RNAV chart의 상단에는 조종사가 신속하게 참조할 수 있도록 구성된 정보들이 포함된다. 차트의 이 부분을 흔히 pilot briefing이라 부른다.
1. minima lines에는 다음이 있다:
(a) GLS. “GLS"는 GBAS Landing System의 약어이다. 미국 버전의 GBAS는 과거 LAAS라 불렸다. 국제 사회는 이러한 유형의 항법 시스템에 대한 공식 용어로 GBAS를 채택하였다. 국제 용어와의 일치를 위해 FAA 또한 GBAS라는 용어를 채택하고 있다. 이 line은 원래 WAAS 및 LAAS minima를 위한 플레이스홀더로 게재되었다. 그리고 minima가 설정되지 않았으므로 N/A라 표기되었었다. GBAS 및 WAAS 절차 간행물에 대한 개념이 발전함에 따라 GLS는 GBAS minima에서만 사용되며 이는 별도의 접근 차트에 게재된다. 대부분의 RNAV (GPS) approach charts는 GLS minima line을 WAAS LPV line of minima로 대체하였다.
(b) LPV. “LPV”는 localizer performance with vertical guidance의 약어이다. LPV lines of minima로 향하는 RNAV (GPS) approaches는 WAAS의 향상된 정확도를 활용한다. 이는 lateral guidance와 vertical guidance를 통해 접근을 제공한다. 이는 Category I ILS(Instrument Landing System)과 매우 유사한 접근을 제공한다. LPV line of minima로 향하는 접근은 항공기가 활주로에 가까워짐에 따라 sensitivity가 증가하는 angular guidance로 설계되었다. 이러한 sensitivity는 ILS와 거의 동일하다. 이는 ILS를 능숙하게 비행하는데 필요한 기술이 LPV line of minima로 향하는 RNAV (GPS) approaches로 이전될 수 있도록 의도적으로 만들어진 것이다. LPV는 vertical guidance를 갖추고 있으며 DA를 향해 비행된다. 항공기 장비가 LPV approaches를 지원한다는 문구가 AFM에 있다면 이 minima line을 비행할 수 있다. 이러한 장비로는 Class 3와 Class 4 TSO-C146이 포함된다.
(c) LNAV/VNAV. LNAV/VNAV는 vertical guidance(일반적으로 approach certified Baro-VNAV에 의해 제공됨)를 갖춘 RNAV IAP를 담기 위해 개발된 APV minimums를 식별한다. 허나 이는 precision approach나 LPV보다 더 높은 lateral integrity limit과 vertical integrity limit을 가지고 있다. LNAV는 Lateral Navigation을, 그리고 VNAV는 Vertical Navigation을 의미한다. 항공기 장비가 GPS approaches를 지원하며 approach-approved barometric VNAV를 갖추고 있다는 문구가 AFM에 있다면 이 minima line을 비행할 수 있다. 항공기가 LNAV/VNAV approaches를 지원하는 것으로 증명된 경우에도 이 minima line을 비행할 수 있다. 이러한 장비로는 Class 2, 3, 그리고 Class 4 TSO-C146이 포함된다. LNAV/VNAV minimums를 사용하는 항공기는 위성이나 그 외의 approach approved VNAV systems가 생성한 하강 경로를 통해 하강한다. electronic vertical guidance가 제공되므로 minima는 DA라 게재된다. 이 외의 항법 시스템들이 이러한 line of minima를 사용하도록 특별히 승인될 수 있다. (U.S. Terminal Procedures books의 Section A, Terms/Landing Minima Data 참조).
(d) LP. “LP”는 localizer performance의 약어이다. LP lines of minima로 향하는 접근은 WAAS의 향상된 정확도를 활용한다. 이는 lateral guidance와 angular guidance를 통해 접근을 제공한다. angular guidance는 glideslope angle을 의미하는 것이 아니다. 이는 항공기가 활주로에 가까워질수록 lateral sensitivity가 증가함을 의미한다(localizer approaches와 유사). 허나 LP line of minima는 DA(H)가 아닌 MDA(Minimum Descent Altitude)이다. LP line of minima를 갖춘 절차는 vertical guidance를 포함하는 다른 접근들(LNAV/VNAV나 LPV)과 함께 게재되지 않는다. LP가 LNAV line of minima보다 더 낮은 minima를 제공하는 경우에는 LP와 LNAV를 하나의 접근 차트에 게재하는 것이 가능하다. LP는 LPV의 fail-down mode가 아니다. LP는 지형, 장애물, 혹은 기타 이유로 인해 vertically guided procedure가 설정될 수 없는 경우에만 게재된다. LP line of minima로 접근 도중 WAAS 항전장치는 GNSS-based advisory vertical guidance를 제공할 수 있다. barometric altimeter 정보는 여전히 altitude restrictions를 준수하기 위한 주요 고도 기준이다. WAAS 장비가 TSO-C145b와 TSO-C146b 전에 승인되었다면 설령 LPV를 지원하더라도 LP를 지원하지 않을 수 있다. 이전 TSO에 따라 승인된 수신기가 LP minima를 비행하기 위해선 제조업체의 업그레이드가 필요할 수 있다. LP가 승인된 수신기는 이러한 접근이 승인되었음을 Flight Manual이나 Supplemental Flight Manual에 명시해야 한다.
(e) LNAV. 이 minima는 lateral navigation만을 위한 것이다. approach minimum altitude는 MDA(minimum descent altitude)로 게재된다. LNAV는 GPS stand alone approaches와 동일한 수준의 서비스를 제공한다. LNAV minimums는 다음의 항법 시스템들을 지원한다:
(1) WAAS(navigation solution이 vertical navigation을 지원하지 않는 경우)
(2) GPS approaches를 수행하도록 승인된 GPS navigation systems.
NOTE-
AC 20−138, Airworthiness Approval of Positioning and Navigation Systems에 따라 승인된 GPS receivers는 이러한 minima를 충족한다. WAAS navigation equipment는 TSO−C145()나 TSO−C146()에 따라 승인되어야 하며 Advisory Circular AC 20−138에 따라 설치되어야 한다.
2. 이 외의 시스템들도 이러한 접근들을 사용하도록 허가받을 수 있다. 자세한 내용은 U.S. Terminal Procedures books의 Section A를 참조한다. Baro-VNAV systems로 LNAV/VNAV minimums까지 운영하기 위해선 operational approval을 받아야 한다. 특정 요인들로 인해 일부 접근에 대해서는 Baro-VNAV가 인가되지 않을 수 있다(예를 들어 local altimeter source를 이용할 수 없는 경우). LPV procedures에서는 Baro-VNAV가 승인되지 않는다. 추가적인 정보에 대해서는 FSDO(Flight Standards District Office)에 문의한다.
NOTE-
RNAV system과 Baro-VNAV system은 제조업체가 제공하는 전자 데이터베이스를 갖추어야 한다. 여기에는 절차에 대한 waypoints, altitudes, 그리고 vertical data가 포함되어야 한다. 시스템은 항법 데이터베이스로부터 절차 제목을 통해 절차를 검색할 수 있어야 한다.
3. ILS or RNAV (GPS) charts.
(a) 일부 RNAV (GPS) charts는 ILS line of minima 또한 포함한다. 이는 ILS precision final을 RNAV GPS 기능과 함께 사용하기 위함이다. final approach segment 이전 구간에 대해, 그리고 missed approach에 대해서는 RNAV GPS 기능이 사용된다. final approach segment 이외의 구간에 대한 장애물 회피는 GPS 기준을 기초로 한다.
NOTE-
일부 GPS receiver는 ILS 주파수가 동조되었을 때 GPS 항법을 금지한다. 이러한 수신기를 장착한 항공기의 조종사는 PFAF(PFAF가 active waypoint) 이전 intermediate segment에 놓이기 전까지는 ILS 주파수 동조를 기다려야 한다. 이후 GPS를 기반으로 하는 실패 접근을 수행하기 위해서는 ILS를 VOR 주파수로 다시 조정해야 한다.
(b) Charting. ILS approach, RNAV (GPS) approach, 그리고 GLS approach를 위한 차트들에는 차이가 있다.
(1) LAAS procedure는 접근 차트에 “GLS RWY XX”라는 제목이 붙는다.
(2) VDB는 공중 수신기에 정보를 제공한다.
(3) LAAS procedure는 RPI, 혹은 approach ID라 불리는 네 글자의 영숫자로 식별된다.
(4) RPI가 차트에 표시된다.
(5) RNAV(GPS) approach charts의 GLS (NA) minima line은 대부분 LPV line of minima로 교체되었다.
(6) LAAS 및 WAAS 절차 간행물에 대한 개념이 발전함에 따라 GLS는 LAAS minima에서만 사용되며 이는 별도의 접근 차트에 게재된다.
4. Required Navigation Performance (RNP).
(a) 특정 RNP level 조건에 따른 항공기 자격 조건에 대해서는 U.S Government Terminal Procedures books의 “TERMS/LANDING MINIMUMS DATA” (Section A)를 참조한다.
(b) 일부 항공기는 GPS 센서 없이 RNP 승인을 받는다. FAA가 RNP 서비스에 대해 지원하는 가장 낮은 수준의 센서는 DME/DME이다. 허나 특정 공항에서는 DME 신호를 이용하지 못할 수 있다. LNAV/VNAV minimums가 게재된 RNAV chart를 갖춘 공항의 경우 “DME/DME RNP−0.3 NA.”라는 procedure note가 제공될 수 있다. 이는 RNP-0.3을 달성하기 위해 DME/DME를 사용하는 RNP 항공기의 경우 접근을 수행할 수 없음을 의미한다. DME 시설의 가용성이 접근 요소인 경우 “DME/DME RNP−0.3 Authorized; ABC and XYZ Required.”라는 note가 포함될 수 있다. 이는 ABC 시설과 XYZ 시설이 RNP-0.3을 보장하기 위한 navigation solution에 필요한 것으로 결정되었음을 의미한다. 접근 절차를 위해 VOR/DME updating을 사용해서는 안 된다.
5. Chart Terminology.
(a) Decision Altitude(DA)는 기존에 사용되었던 용어인 Decision Height(DH)를 대체한다. DA는 altitudes가 MSL을 기준으로 하고 heights가 AGL을 기준으로 하는 국제적 관례를 따른다. 따라서 DA는 vertical guidance를 갖춘 계기 접근 절차들에 대해 게재된다. DA는 차트의 descent profile이 DA(MSL)를 향해 비행됨을 나타낸다. 만약 시각 참조물이 확인되지 못하였다면 DA에서 실패 접근이 수행된다. final approach에서 missed approach로 전환하는 도중 DA 미만으로 잠깐 하강할 수 있도록 장애물 간격이 제공된다.
(b) Minimum Descent Altitude(MDA)는 LNAV only procedure와 circling procedure에서만 사용된다.
(c) Threshold Crossing Height(TCH)는 “precision” approach에서 threshold로부터의 glide slope 높이로서 사용된다. 또한 LNAV/VNAV minimums와 RNAV descent angles가 descent profiles와 함께 게재됨에 따라 TCH는 threshold에서의 “descent angle” 높이, 혹은 glidepath 높이에도 적용된다. TCH는 일반적으로 30 ~ 50ft이다(단, IAP를 이용할 수 있는 대형 항공기에 의해 달리 필요한 경우 제외).
6. MINIMA FORMAT 또한 약간 변경되었다.
(a) RNAV IAP의 각 line of minima에 이용 가능한 서비스 범위가 반영된다(예를 들어 GLS, LPV, LNAV/VNAV, LP, 그리고 LNAV). CIRCLING minima 또한 제공된다.
(b) minima title box는 minimum altitude의 특성을 나타낸다. 예를 들어:
(1) DA는 vertical guidance를 제공하는 접근의 minima line으로 게재된다(예를 들어 GLS, LPV, 혹은 LNAV/VNAV).
(2) MDA는 LNAV, LP, 혹은 lateral guidance만을 제공하는 접근의 minima line으로 게재된다. MDA 미만으로 하강할 경우 14 CFR Section 91.175에 명시된 조건이 충족되어야 한다.
(3) 두 개 이상의 시스템(예를 들어 LPV와 LNAV/VNAV)이 동일한 minimums를 사용하는 경우 각 line of minima가 별도로 표시된다.
7. Chart Symbology가 약간 변경되었다:
(a) Descent Profile. 차트에는 descent profile이, 그리고 활주로로 향하는 vertical path가 표시된다. RNAV vertical guidance를 표시하는 그림은 종래의 ILS glide slope(깃 모양)과 다르다.
(1) 각 구간 내에서 최적의 stabilized descents(일정한 하강률)를 달성할 수 있도록 fixes/waypoints에 minimum altitudes를 설정하는 것이 FAA의 정책이다. 이러한 설계는 운영의 안정성을 향상시키며 CFIT(controlled flight into terrain) 사고를 줄이는데 기여할 수 있다. 또한 최근 NTSB(National Transportation Safety Board)는 IAP descent angle이 조종사의 stabilized descent에 도움을 제공할 수 있음을 강조하였다. RNAV IAP는 1/100도 단위의 descent angle을 포함한다(예를 들어 3.00도). 이러한 각도는 descent profile에서 제공된다.
(2) WAAS system이나 LNAV/VNAV system이 제공하는 수직 항법 정보를 통해 stabilized approach를 수행할 수 있다. LNAV-only system의 경우 조종사는 항공기 attitude/groundspeed 조합을 결정하여 차트의 descent angle과 일치하는 일정한 하강률을 달성한다. 조종사를 돕기 위해 U.S. Government Terminal Procedures Publication charts는 Rate of Descent Table을 게재한다. 이는 groundspeed에 따른 정밀한 하강을 계획 및 수행하는데 사용된다.
(b) Visual Descent Point(VDP). VDP는 대부분의 RNAV IAP에 게재된다. VDP는 LP나 LNAV minima를 사용하는 항공기만 적용된다(LPV나 LNAV/VNAV minimus에는 적용되지 않음).
(c) Missed Approach Symbology. 실패 접근 절차를 보다 쉽게 이해하도록 만들기 위해 profile view에 missed approach guidance를 아이콘으로 표시하는 방법이 개발되었다. profile area의 여백이 한정적이므로 오직 4개 이하의 아이콘만을 표시할 수 있다. 허나 아이콘들이 실패 접근 절차를 전부 나타내지 않을 수도 있다. 실패 접근 절차를 전부 나타내는 텍스트가 접근 차트 상단의 pilot briefing에서 제공된다. (그림 5-4-6 참조).
(d) Waypoints. 모든 RNAV IAP와 GPS stand-alone IAP는 항공기 데이터베이스에서 얻은 정보를 통해 비행된다. 여기에는 접근 및 실패 접근에 사용되는 모든 WP들의 sequence가 포함된다. 일부 TSO-C129 수신기 데이터베이스에는 step down waypoints가 포함되지 않을 수도 있다. 대부분의 수신기 데이터베이스는 WP가 FO(fly-over)인지 FB(fly-by)인지 항법 시스템에 알려주는 코딩을 포함한다. 항법 시스템은 fly-by WP 이전에 turn lead를 제공하거나, 혹은 fly-over WP의 overflight를 제공할 수 있다. 항법 시스템이 이러한 지시를 제공하지 않는 경우 조종사는 turn lead나 waypoint overflight를 직접 수행해야 한다. FB WP에 대한 차트 기호는 조종사로 하여금 예상되는 행동을 인지하게 해준다. U.S. Terminal Procedures books의 legend를 참조한다.
(e) TAA는 paragraph 5-4-5d, Terminal Arrival Area(TAA)에 설명되어 있다. RNAV chart는 RNAV procedure와 관련된 각 TAA area를 나타내는 아이콘을 통해 TAA area를 표시한다(그림 5-4-6 참조). 이러한 아이콘들은 접근 차트의 plan view에 표시된다. 아이콘들은 일반적으로 en route structure로부터 항공기가 입항하는 위치에 따라 배치된다. 각 TAA area 내 항법이 적절한 WP에 이름이 지정되며 TAA 아이콘에 표시된다. 이름이 지정된 각각의 WP는 해당 영역 내에서의 입항을 위한 IAF이다. 공역 혼잡이나 기타 이유로 인해 TAA가 RNAV procedures에 사용되지 않을 수도 있다.
(f) Published Temperature Limitations. IAP middle briefing strip의 notes box에 게재될 수 있는 온도 제한 사항은 현재 두 가지이다:
(1) baro-VNAV의 사용과 관련된 온도 범위 제한. 이는 RNAV (GPS), 혹은 RNAV (RNP)라는 제목을 갖춘 United States PBN IAP에 게재될 수 있다.
(2) Cold Temperature Airport(CTA) 제한. 이는 공항에 대해 게재된 모든 IAP에 눈송이 모양 아이콘과 섭씨온도로 지정된다.
REFERENCE-
AIM, Chapter 7, Section 3, Cold Temperature Barometric Altimeter Errors, Setting Procedures and Cold Temperature Airports (CTA).
(g) WAAS Channel Number/Approach ID. WAAS Channel Number는 부가적인 장비 기능이다. 이는 메뉴 방법 대신 5자리의 숫자를 사용하여 final approach segment를 선택할 수 있게 해준다. Approach ID는 공항 고유의 4자리 조합이다. 이는 항공기 데이터베이스로부터 정확한 final approach segment 정보를 선택하였는지 확인하기 위함이다. 이는 ILS ident와 유사하다(단, 청각적 식별이 아닌 시각적 식별이 사용됨). Approach ID는 문자 W(WAAS의 W), runway number, 그리고 L∙C∙R 이외의 문자(Left, Center, 그리고 Right와 혼동될 수 있으므로)로 구성된다(예를 들어 W35A). Approach ID는 해당 공항의 runway number에 WAAS approaches가 설정되는 순서에 따라 할당된다. WAAS Channel Number와 Approach ID는 approach procedure pilot briefing의 왼쪽 상단 모서리에 표시된다.
(h) 초기 시스템 한계로 인해 WAAS vertical guidance의 중단이 날마다 발생할 수 있는 위치의 경우 다음과 같은 W 기호가 RNAV (GPS) chart에 배치된다.

이러한 중단의 지속 시간은 대부분 매우 짧다. 허나 이는 접근의 vertical portion을 중단시킬 수 있다. W 기호가 표시될 경우 WAAS LNAV/VNAV나 LPV의 vertical service 중단에 대하여 NOTAM, 혹은 Air Traffic advisories가 제공되지 않음을 의미한다. 이러한 위치가 목적지 공항이거나 교체비행장이라면 비행 계획 시 LNAV, 혹은 circling minima를 사용한다. 만약 비행 운영 시 WAAS 항전장치가 LNAV/VNAV, 혹은 LPV가 가능함을 나타낸다면 접근 완료를 위해 vertical guidance를 사용할 수 있다. 접근 도중 vertical guidance의 중단이 발생하였다면 LNAV minima로 전환해야할 수 있다. WAAS 적용 범위가 확장됨에 따라 W 기호가 사라질 것이다.
NOTE-
올바른 훈련 및 인가를 받은 TSO-C145() 및 TSO-C146() 사용자(WAAS 사용자)는 baro-VNAV 장비를 사용하여 교체비행장에서의 LNAV/VNAV DA를 계획할 수 있다. 특별 인가를 받은 WAAS 사용자는 baro-VNAV 장비를 사용하여 교체비행장에서의 RNP 0.3 DA를 계획할 수도 있다(단, 조종사가 prediction program을 통해 RNP 가용성을 확인해야 함).
'AIM 5장(2023) > Section 4. Arrival Procedures' 카테고리의 다른 글
| 5-4-3. Approach Control (0) | 2023.10.09 |
|---|---|
| 5-4-4. Advance Information on Instrument Approach (0) | 2023.10.09 |
| 5-4-6. Approach Clearance (1) | 2023.10.09 |
| 5-4-7. Instrument Approach Procedures (1) | 2023.10.09 |
| 5-4-8. Special Instrument Approach Procedures (0) | 2023.10.09 |