
22.8 Thunderstorm Avoidance
22.8.1 Airborne Weather Avoidance Radar(Aircraft Radar)
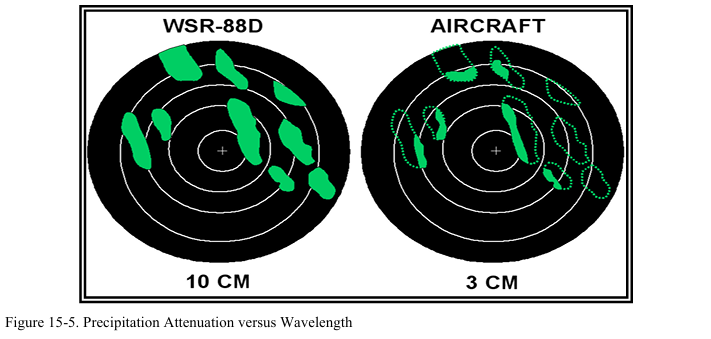
공중탑재 기상회피 레이더(airborne weather avoidance radar)는 그 이름에서 알 수 있듯이 악천후를 피하기 위한 것이지 그 속으로 진입하기 위한 것이 아니다. 레이더 에코가 감지되는 지역으로 비행할지 말지는 에코의 강도, 에코들 사이의 간격, 그리고 조종사와 항공기의 능력에 달려있다. 공중탑재 기상 레이더가 기상 현상을 탐지하는 능력은 방향과 거리에서 모두 제한적이다. 일부 공중탑재 레이더는 도플러 효과(Doppler effect)를 기반으로 하는 turbulence display mode를 갖추고 있다. 이러한 도플러 레이더는 precipitation(때로는 wet precipitation이라고도 함)과 관련된 난기류는 탐지할 수 있지만 청천난기류(CAT – clear-air turbulence)를 탐지하지는 못한다. 또한 레이더 화면이 구름과 안개로 인한 계기비행 기상 조건을 회피시켜준다는 보장을 제공하지도 않는다. 레이더 시스템이 내보내는 전파 신호를 강수 세포가 모두 흡수하거나 반사하면 감쇠(attenuation. Section 15.2.5 참조)라 불리는 현상이 발생할 수 있다(그림 15-5 참조). 감쇠로 인해 첫 번째 강수 세포 뒤에 위치할 수 있는 추가적인 강수 세포들을 레이더가 탐지하지 못할 수 있다. 이를 레이더 “음영(shadow)”라 부르기도 한다. 공중탑재 기상 레이더를 장착한 항공기의 조종사는 해당 시스템의 작동 기법과 한계를 숙지해야 한다.
우박은 항상 레이더 에코를 발생시키지만 가장 가까운 visible cloud로부터 수 마일 떨어진 곳에서 떨어질 수 있다는 점을, 그리고 위험한 난기류가 레이더 에코의 가장자리로부터 최대 20마일까지 확장될 수 있다는 점을 유의해야 한다.
22.8.2 Thunderstorm Avoidance Guidance
설령 radar observers에 의해 레이더 에코 강도가 약하다고 보고를 받더라도 뇌우를 대수롭지 않게 여겨서는 안 된다. 뇌우는 회피하는 것이 최선이다. 다음은 뇌우를 피하기 위한 지침이다:
1. 다가오는 뇌우의 전방에서 이착륙을 수행하지 않는다. 돌풍 전선(gust front)의 갑작스러운 저고도 난기류로 인해 조종제어 상실(loss of control)이 발생할 수 있다.
2. 설령 뇌우의 반대편이 보일지라도 뇌우 아래를 비행하려 시도하지 않는다. 뇌우 아래에 존재하는 난기류와 급변풍(wind shear)은 위험할 수 있다.
3. 뇌우의 모루구름(anvil) 아래를 비행하려 시도하지 않는다. 그곳에 극심한 청천난기류(CAT)가 존재할 가능성이 있다.
4. 공중탑재 레이더 없이 산발적인 은폐 뇌우(scattered embedded thunderstorm)를 내포하는 구름 속으로 비행하지 않는다. 은폐되지 않은 산발적인 뇌우는 보통 육안으로 우회될 수 있다.
5. 시각적 겉모습이 뇌우 내의 난기류를 나타내는 신뢰할만한 지표라 믿지 않는다.
6. ATC가 레이더 항법 안내나 뇌우를 우회하는 경로를 제공할 것이라 가정하지 않는다.
7. 뇌우 지역을 통과하는 경로(tactical maneuvering)를 찾기 위한 유일한 수단으로 data-linked weather radar(예를 들어 NEXRAD) 모자이크 영상을 사용하지 않는다.
8. data-linked NEXRAD 모자이크 영상은 현재의 기상이 아니라 과거의 기상을 보여준다는 것을 기억하라. 화면에 표시되는 영상은 실제 기상보다 15 ~ 20분정도 오래된 정보일 수 있다.
9. ATC 주파수에서 우회 경로나 회항을 요청하는 다른 항공기의 교신 내용과 PIREP을 청취한다.
10. 필요하다면 ATC에 레이더 항법 안내를 요청하거나 뇌우를 우회하는 경로를 요청한다.
11. 뇌우를 완전히 회피하기 위한 경로(strategic maneuvering)를 선택하기 위해 data-linked weather NEXRAD 모자이크 영상(예를 들어 FIS-B)을 사용한다.
12. 다른 관제사로 이양되었다면 기존의 경로로 되돌아가는 것을 수락하기 전에 뇌우 회피 경로를 비행하고 있다고 ATC에 알린다.
13. 뇌우 회피 경로를 승인받은 후 기존의 경로로 되돌아가는 것을 수락하기 전에 비행경로에 뇌우가 없는지 확인한다.
14. 악성 뇌우(severe thunderstorm)나 극심한 레이더 에코를 나타내는 뇌우는 최소 20마일 회피한다. 특히 커다란 적란운(cumulonimbus)의 모루구름 아래에서는 더더욱 그러하다. 이러한 에코들의 사이를 비행할 때에는 최소 40마일의 간격을 유지해야 한다. 약한 레이더 에코를 회피하는 경우에는 간격이 줄어들 수 있다.
15. 특정 구역의 6/10 이상이 뇌우로 덮여 있다면 그 구역 전체를 우회한다.
16. 선명하고 빈번한 번개는 악성 뇌우의 가능성을 나타낸다.
17. 육안으로 보았을 때, 혹은 레이더에서 확인하였을 때 상단이 35,000ft 이상인 뇌우는 극도로 위험하다 간주한다.
18. 비행 조건에 대한 PIREP을 제출한다.
19. 뇌우 지역을 우회할 수 없다면 회항을 한 후 지상에서 뇌우가 지나가기를 기다린다.
만약 뇌우에 진입하는 것을 피할 수 없다면 뇌우에 진입하기 전에 다음 지침을 따른다:
1. 안전벨트를 단단히 메고, 어깨끈을 착용하고(어깨끈이 설치되어 있는 경우), 고정되지 않은 물체들을 모두 고정한다.
2. 최소한의 시간으로 뇌우를 통과할 수 있도록 경로를 계획 및 유지한다.
3. 가장 극심한 착빙을 피하기 위해 결빙층 이하의 고도나 –15˚C 이상의 고도를 뇌우 통과 고도로 설정한다.
4. pitot heat이 켜져 있는지 확인하고 carburetor heat이나 jet engine anti-ice를 켠다. 어떤 고도에서든 착빙이 빠르게 발생할 수 있으며 이는 거의 즉각적인 출력 손실 및/혹은 대기속도 감소를 초래할 수 있다.
5. aircraft manual에서 권장하는 turbulence penetration airspeed에 대한 출력을 설정한다.
6. 번개로 인하여 일시적으로 실명될 가능성을 줄이기 위해 조종실 조명을 최대로 높인다.
7. automatic pilot을 사용하고 있었다면 Altitude Hold Mode와 Speed Hold Mode를 해제한다. 자동 고도 및 속도 제어는 항공기 움직임을 증가시켜서 구조적 응력을 증가시킨다.
8. 만약 공중탑재 레이더를 사용하고 있다면 안테나를 가끔 위아래로 기울인다. 이는 현재 비행 중인 고도 이외의 층에 놓인 뇌우 활동을 감지할 수 있게 해준다.
9. 계기를 계속 주시한다. 조종석 바깥을 바라보면 번개로 인하여 일시적으로 실명될 위험이 높아질 수 있다.
10. 출력 설정을 변경하지 않는다. turbulence penetration airspeed에 대한 출력 설정을 유지한다.
11. 일정한 자세를 유지한다. 고도와 대기속도가 변동하는 것을 허용한다.
12. 일단 뇌우에 진입하였다면 절대 되돌아가지 않는다. 뇌우를 통과하는 직진 경로가 항공기를 가장 빠르게 위험으로부터 벗어나게 만들 가능성이 높다. 게다가 선회 기동은 항공기의 응력을 증가시킨다.
'Aviation Weather Handbook(2024) > 22: Thunderstorms' 카테고리의 다른 글
| 22.3 Thunderstorm Cell Life Cycle (0) | 2025.09.17 |
|---|---|
| 22.4 Thunderstorm Types (0) | 2025.09.17 |
| 22.5 Factors that Influence Thunderstorm Motion (0) | 2025.09.17 |
| 22.6 Thunderstorm Terminology (0) | 2025.09.17 |
| 22.7 Hazards (0) | 2025.09.17 |